
The Railway Timetable Evaluation Method in Terms of Operational Robustness against Overloads of the Power Supply System


Abstract
:1. Introduction
2. Literature Review
3. Physical Description of Train Movement
4. Method Description
- Step 1.
- The infrastructure parameters are analysed using available databases, and data are gathered for calculations. The minimum data needed for further analyses are the speed limits, the longitudinal profile, the curves, the energy section locations, and the maximum current available.
- Step 2.
- The second step is based on the parameter identification process. The scheduled train speeds are identified from the planned timetable, mainly the intermediate stops.
- Step 3.
- Using the operational database, the delay probability density function is estimated for the train in the given section.
- Step 4.
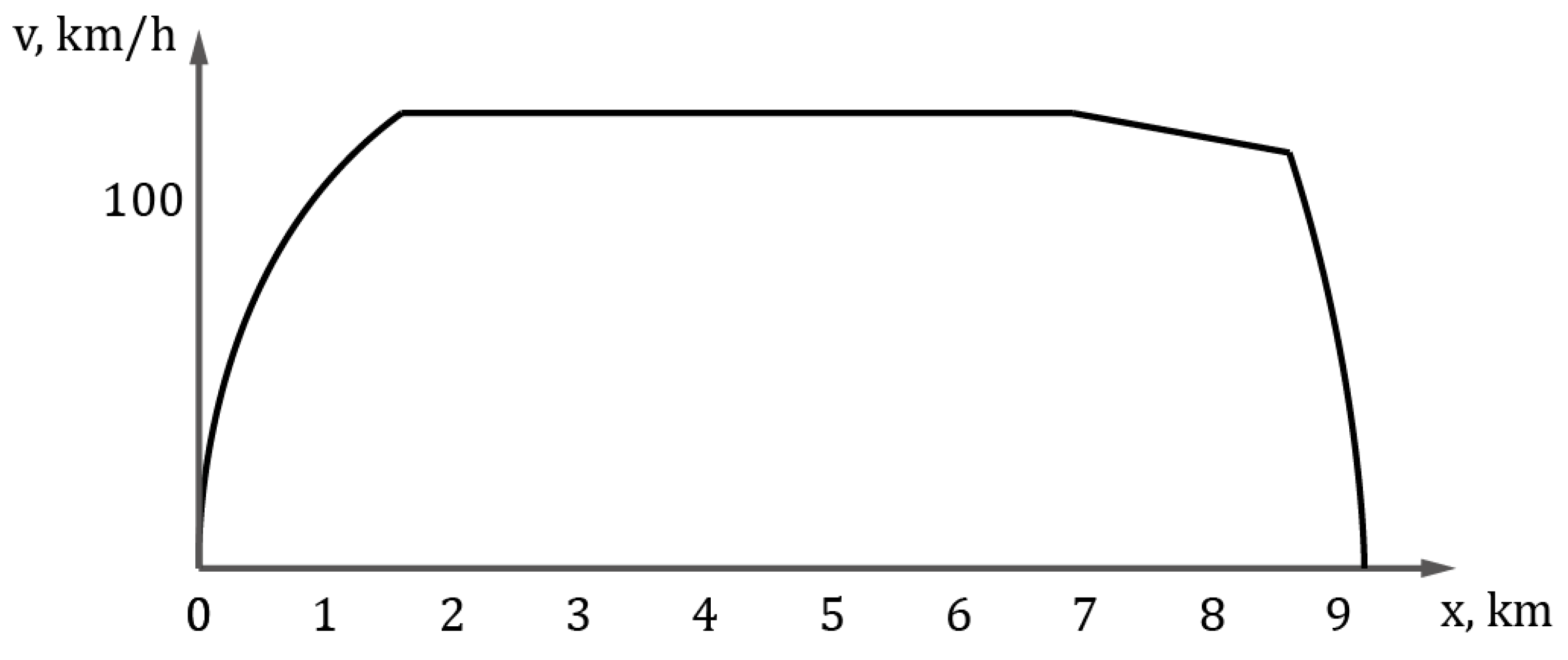
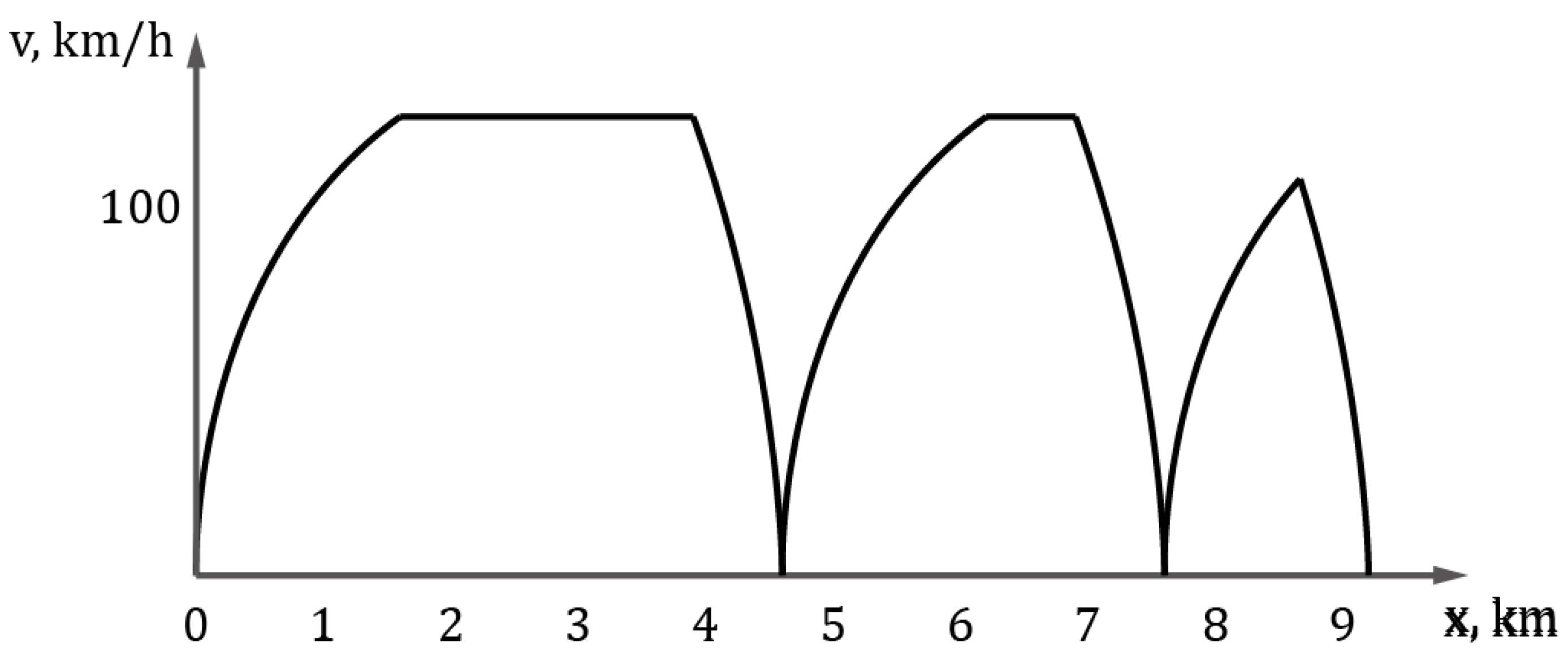
- Using the gathered data on infrastructure and timetable, the equation of motion is solved for the analysed section and the first train for a scheduled traffic situation.
- Step 5.
- This step finds the maximum current for a given train on the section.
- Step 6.
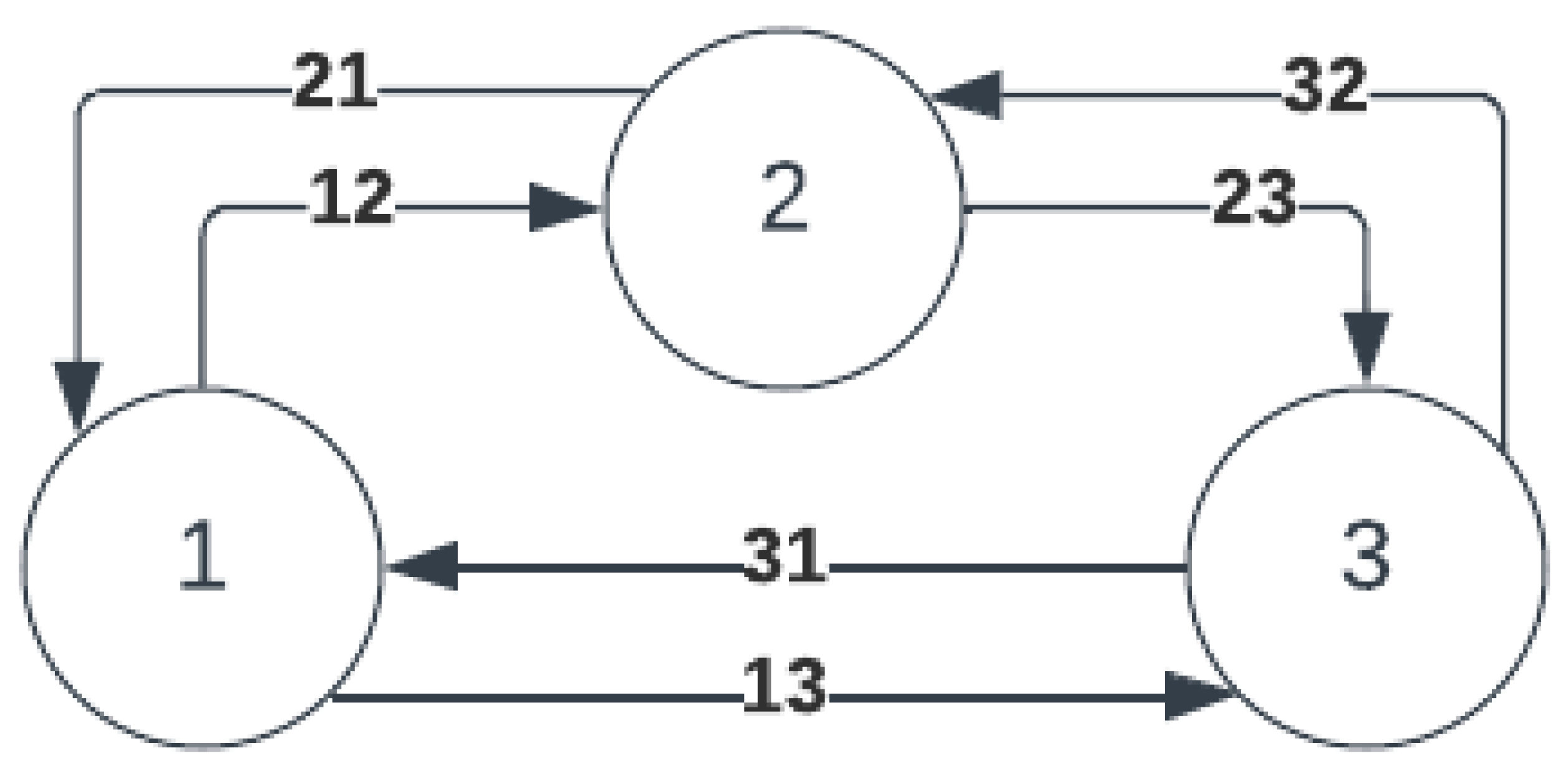
- Simplifying the equation of motion results in a discrete form of current vs. time form: state vs. time, where all current values are translated into one of three possible current-dependent states (maximum, intermediate, and low).
- Step 7.
- The times between states are extracted from the state vs. time graph to calculate the mean time between the transition from one state to another. Then, the inverse values of the mean times between the states are calculated to obtain the transition intensities between these states.
- Step 8.
- According to the Markov model and the final formula (17), the probability of maximum current occurrence is calculated for the given train on the given section. The probability estimation is performed for the scheduled operation for the first iteration.
- Step 9.
- Step 9a. The decision is made depending on whether the estimation was performed for the scheduled operation or disrupted traffic. If it was for scheduled operation, the algorithm moves to step 8a. If not, then it moves to step 10.Step 9b. During this step, the third one is repeated for the disrupted scenario, and the algorithm continues from step 5.
- Step 10.
- According to formula (15), the maximum current probability occurrence for the given train on the given section (including disrupted and scheduled situations) is calculated.
- Step 11.
- The decision depends on whether the train is the last one to analyse. If so, then the algorithm moves on to step 12. If not, then it moves back to step 3.
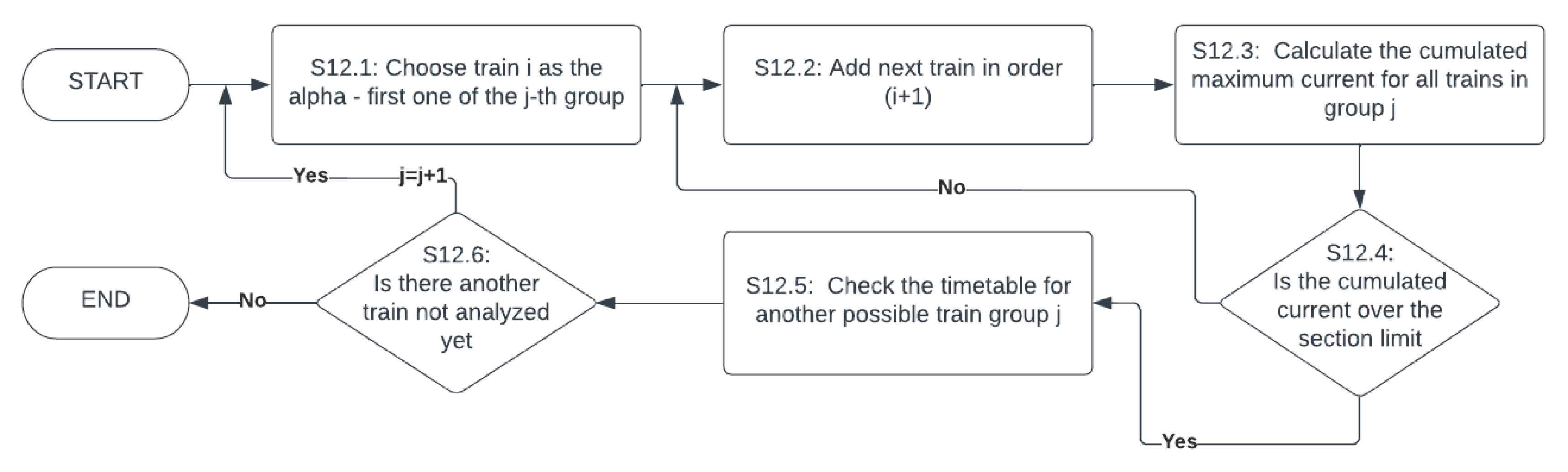
- Step 12.
- In this step, train groups are built. Starting from the first train in the schedule, the trains are grouped together until the maximum current on the section is exceeded by their cumulated maximum current. Step is described as a Figure 8.
- Step 13.
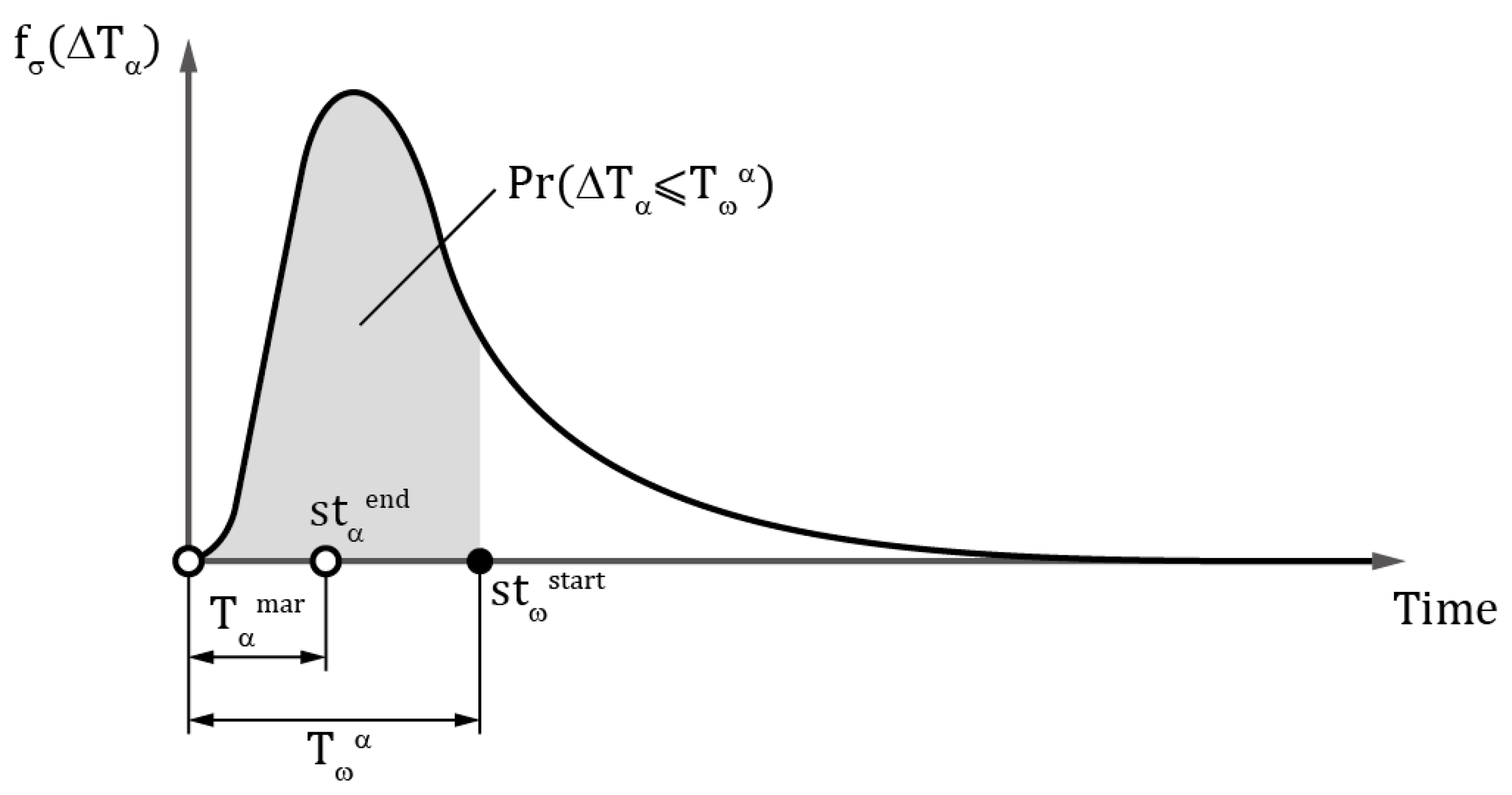
- Based on the estimated delay probability functions in step 10, the probability that train alpha will aggregate the group by being late and the probability that the omega train in the group will be on time are calculated. Their product gives the probability that the j-th group will occur. After multiplying them by the probability that the maximum current will occur (Equation (14)), we obtain the probability that the j-th group will cause an overload (Equation (13)).
- Step 14.
- It is analysed whether group j is the last one. If not, the algorithm moves back to step 13 to calculate the overload probability for the next aggregated group in the section.
- Step 15.
- According to Equation (11), the final measure of robustness against overloads is calculated.
- Step 16.
- If there is no other section to analyse, the algorithm ends.
5. Case Study
- Increasing the number of trains in the train group—this can be achieved by getting a lower level of total maximum current values in the given train group; it can be implemented by:
- Lowering the acceleration rate and, consequently, increasing the travel time on the section, which will decrease the time distances between the given trains;
- Changing the train order and/or moving the trains in time (in the schedule).
- Decreasing the probability of the maximum current of trains in the given group , the same action can do it as in point one.
- Decreasing the probability that the first train in the group will aggregate the trains—this can be achieved by increasing the time–space between the first and last train of the given group.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Popescu, M.; Bitoleanu, A. A Review of the Energy Efficiency Improvement in DC Railway Systems. Energies 2019, 12, 1092. [Google Scholar] [CrossRef]
- Lin, X.; Wang, Q.; Wang, P.; Sun, P.; Feng, X. The Energy-Efficient Operation Problem of a Freight Train Considering Long-Distance Steep Downhill Sections. Energies 2017, 10, 794. [Google Scholar] [CrossRef]
- Dominguez, M.; Fernández-Cardador, A.; Cucala, A.P.; Pecharroman, R.R. Energy Savings in Metropolitan Railway Substations Through Regenerative Energy Recovery and Optimal Design of ATO Speed Profiles. IEEE Trans. Autom. Sci. Eng. 2012, 9, 496–504. [Google Scholar] [CrossRef]
- Su, S.; Wang, X.; Cao, Y.; Yin, J. An Energy-Efficient Train Operation Approach by Integrating the Metro Timetabling and Eco-Driving. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4252–4268. [Google Scholar] [CrossRef]
- Morea, D.; Elia, S.; Boccaletti, C.; Buonadonna, P. Improvement of Energy Savings in Electric Railways Using Coasting Technique. Energies 2021, 14, 8120. [Google Scholar] [CrossRef]
- Ghoseiri, K. A New Idea for Train Scheduling Using Ant Colony Optimization. WIT Trans. Built Environ. 2006, 8, 9. [Google Scholar]
- Samà, M.; D’Ariano, A.; Pacciarelli, D.; Pellegrini, P.; Rodriques, J. Ant colony optimisation for train routing selection: Operational vs. tactical application. In Proceedings of the 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017; Volume 5, pp. 297–302. [Google Scholar]
- Montrone, T.; Pellegrini, P.; Nobili, P.; Longo, G. Energy consumption minimisation in Railway Planning. In Proceedings of the IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016. [Google Scholar]
- Lu, Q.; He, B.; Wu, M.; Zhang, Z.; Luo, J.; Zhang, Y.; He, R.; Wang, K. Establishment and Analysis of Energy Consumption Model of Heavy-Haul Train on Large Long Slope. Energies 2018, 11, 965. [Google Scholar] [CrossRef]
- Rocha, A.; Araújo, A.; Carvalho, A.; Sepulveda, J. A New Approach for Real Time Train Energy Efficiency Optimization. Energies 2018, 11, 2660. [Google Scholar] [CrossRef]
- Wang, L.; Wang, X.; Liu, K.; Sheng, Z. Multi-Objective Hybrid Optimization Algorithm Using a Comprehensive Learning Strategy for Automatic Train Operation. Energies 2019, 12, 1882. [Google Scholar] [CrossRef]
- Fernández-Rodríguez, A.; Fernández-Cardador, A.; Cucala, A.P.; Falvo, M.C. Energy Efficiency and Integration of Urban Electrical Transport Systems: EVs and Metro-Trains of Two Real European Lines. Energies 2019, 12, 366. [Google Scholar] [CrossRef]
- Gong, C.; Zhang, S.; Zhang, F.; Jiang, J.; Wang, X. An integrated energy-efficient operation methodology for metro systems based on a real case of Shanghai metro line one. Energies 2014, 7, 7305–7329. [Google Scholar] [CrossRef] [Green Version]
- Peña-Alcaraz, M.; Fernández, A.; Cucala, A.P.; Ramos, A.; Pecharromán, R.R. Optimal underground timetable design based on power flow for maximizing the use of regenerative-braking energy. Proc. Inst. Mech. Eng. Part F 2012, 226, 397–408. [Google Scholar] [CrossRef]
- Bu, B.; Ding, Y.; Li, C.; Mao, X. Research on integration of train control and train scheduling. J. China Railw. Soc. 2013, 35, 64–71. [Google Scholar]
- Radu, P.V.; Szelag, A.; Steczek, M. On-Board Energy Storage Devices with Supercapacitors for Metro Trains—Case Study Analysis of Application Effectiveness. Energies 2019, 12, 1291. [Google Scholar] [CrossRef]
- Arboleya, P.; El-Sayed, I.; Mohamed, B.; Mayet, C. Modeling, Simulation and Analysis of On-Board Hybrid Energy Storage Systems for Railway Applications. Energies 2019, 12, 2199. [Google Scholar] [CrossRef]
- Hillmansen, S.; Ellis, R. Electric railway traction systems and techniques for energy saving. In Proceedings of the IET 13th Professional Development Course on Electric Traction Systems, London, UK, 3–6 November 2014. [Google Scholar]
- Cascetta, F.G.; Cipolletta, A.; Delle Femine, J.; Quintana Fernández, D.; Gallo, D.; Giordano, D.S. Impact of a reversible substation on energy recovery experienced onboard a train. Measurement 2021, 183, 109793. [Google Scholar] [CrossRef]
- Cipolletta, G.; Delle Femine, A.; Gallo, D.; Luiso, M.; Landi, C. Design of a Stationary Energy Recovery System in Rail Transport. Energies 2021, 14, 2560. [Google Scholar] [CrossRef]
- Bu, B.; Qin, G.; Li, L.; Li, G. An Energy Efficient Train Dispatch and Control Integrated Method in Urban Rail Transit. Energies 2018, 11, 1248. [Google Scholar] [CrossRef]
- Chen, E.; Bu, B.; Sun, W. An Energy-Efficient Operation Approach Based on the Utilisation of Regenerative Braking Energy Among Trains. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 2606–2611. [Google Scholar]
- Burggraeve, S.; Bull, S.H.; Vansteenwegen, P.; Lusby, R.M. Integrating robust timetabling in line plan optimisation for railway systems. Transp. Res. 2017, 77, 134–160. [Google Scholar]
- Ghaemia, N.; Zilko, A.; Yan, F.; Cats, O.; Kurowicka, D.; Goverde, R. Impact of railway disruption predictions and rescheduling on passenger delays. J. Rail Transp. Plan. Manag. 2018, 8, 103–122. [Google Scholar] [CrossRef]
- Lusby, R.M.; Larsen, J.; Bull, S. A survey on robustness in railway planning. Eur. J. Oper. Res. 2017, 266, 1–15. [Google Scholar] [CrossRef]
- Salido, M.A.; Barber, F.; Ingolotti, L. Robustness in railway transportation scheduling. In Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 2880–2885. [Google Scholar]
- Burggraeve, S.; Vansteenwegen, P. Robust routing and timetabling in complex railway stations. Transp. Res. 2017, 101, 228–244. [Google Scholar] [CrossRef]
- Chao, L.; Jinjin, T.; Leishan, Z.; Yixiang, Y.; Zhitong, H. Improving recovery to optimality robustness through efficiency balanced design of timetable structure. Transp. Res. 2017, 85, 184–210. [Google Scholar]
- Walkowiak, T.; Mazurkiewicz, J. Soft computing approach to discrete transport system management. Lect. Notes Comput. Sci. 2010, 6114, 675–682. [Google Scholar]
- Solinen, E.; Nicholson, G.; Peterson, A. A microscopic evaluation of railway timetable robustness and critical points. J. Rail Transp. Plan. Manag. 2017, 7, 207–223. [Google Scholar] [CrossRef]
- Reynolds, E.; Stephen, J. Maher, A data-driven, variable-speed model for the train timetable rescheduling problem. Comput. Oper. Res. 2022, 142, 105719. [Google Scholar] [CrossRef]
- İsmail Şahin Markov chain model for delay distribution in train schedules: Assessing the effectiveness of time allowances. J. Rail Transp. Plan. Manag. 2017, 7, 101–113.
- Madej, J. Teoria Ruchu Pojazdów Szynowych; Oficyna Wydawnicza Politechniki Warszawskiej: Warszawa, Poland, 2012. [Google Scholar]
- Kwaśnikowski, J. Elementy Teorii Ruchu i Racjonalizacja Prowadzenia Pociągu; Wydawnictwo Naukowe Instytutu Technologii Eksploatacji—PIB: Radom, Poland, 2013. [Google Scholar]
- Wyrzykowski, W.ł. Ruch Kolejowy; Wydawnictwa Komunikacji: Warszawa, Poland, 1951. [Google Scholar]
- Podoski, J. Zasady Trakcji Elektrycznej; Wydawnictwa Komunikacji i Łączności: Warszawa, Poland, 1980. [Google Scholar]
- Friedrich, J.; Restel, F.J.; Wolniewicz, Ł. Railway Operation Schedule Evaluation with Respect to the System Robustness. In Proceedings of the Contemporary Complex Systems and Their Dependability. DepCoS-RELCOMEX 2018, Advances in Intelligent Systems and Computing, Brunów, Poland, 2–6 July 2018; Volume 761. [Google Scholar]
- Restel, F.J. The robustness assessment method of railway timetables. In Proceedings of the 8th Carpathian Logistics Congress, CLC’2018: Conference Proceedings, Prague, Czech Republic, 3–5 December 2018; pp. 735–744. [Google Scholar]
- Restel, F.; Wolniewicz, Ł.; Mikulčić, M. Method for Designing Robust and Energy Efficient Railway Schedules. Energies 2021, 14, 8248. [Google Scholar] [CrossRef]
- Restel, F.J. The railway operation process evaluation method in terms of resilience analysis. Arch. Transp. 2021, 57, 73–89. [Google Scholar]
- Restel, F.J. The Markov reliability and safety model of the railway transportation system. In Safety and reliability: Methodology and applications. In Proceedings of the European Safety and Reliability Conference, ESREL 2014, Wroclaw, Poland, 14–18 September 2014. [Google Scholar]
- Kroon, L.G.; Dekker, R.; Vromans, M.J.C.M. Cyclic Railway Timetabling: A Stochastic Optimization Approach. In Algorithmic Methods for Railway Optimization; Lecture Notes in Computer Science; Geraets, F., Kroon, L., Schoebel, A., Wagner, D., Zaroliagis, C.D., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; p. 4359. [Google Scholar]
- Policella, N.; Smith, S.F.; Cesta, A.; Oddi, A. Generating Robust Schedules through Temporal Flexibility. In Proceedings of the Fourteenth International Conference on International Conference on Automated Planning and Scheduling, ICAPS’04, Whistler, Canada, 3–7 June 2004; pp. 209–218. [Google Scholar]
- Büchel, B.; Corman, F. Modelling probability distributions of public transport travel time components. In Proceedings of the 18th Swiss Transport Research Conference (STRC 2018), Ascona, Switzerland, 16–18 May 2018. [Google Scholar]
- Pachl, J. Systemtechnik des Schienenverkehrs. Bahnbetrieb Planen, Steuern und Sichern, 8. Aufl.; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Yang, X.; Li, X.; Ning, B.; Tang, T. A Survey on Energy-Efficient Train Operation for Urban Rail Transit. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2–13. [Google Scholar] [CrossRef]
- Yang, X.; Ning, B.; Li, X.; Tang, T. A Two-Objective Timetable Optimization Model in Subway Systems. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1913–1921. [Google Scholar] [CrossRef]
- Yang, L.; Li, K.; Gao, Z.; Li, X. Optimizing trains movement on a railway network. Omega 2012, 40, 619–633. [Google Scholar] [CrossRef]
- Azad, N.; Hassini, E.; Verma, M. Disruption risk management in railroad networks: An optimization-based methodology and a case study. Transp. Res. Part B Methodol. 2016, 85, 70–88. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Train Type | Delay PDF | ||
|---|---|---|---|
| Passenger | 0.71 | 0.29 | |
| Freight | 0.67 | 0.33 |
| Train Type | Max Current (A) | ||||||
|---|---|---|---|---|---|---|---|
| Passenger (sch) | 887 | 0.833 | 0.345 | 0.455 | 0.000 | 0.190 | - |
| Passenger (dis) | 0.833 | 1.176 | 1.667 | 1.111 | - | 0.348 | |
| Freight (sch) | 2193 | 0.278 | 0.357 | 0.294 | 0.000 | 0.367 | - |
| Freight (dis) | 0.244 | 0.679 | 0.737 | 0.526 | - | 0.416 |
| Train Group | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| No. of passenger trains | 2 | 1 | 1 | 0 | 0 | 3 | 3 | 3 | 2 | 1 | 3 | 2 |
| No. of freight trains | 2 | 2 | 2 | 2 | 2 | 1 | 1 | 1 | 2 | 2 | 2 | 2 |
[min:s] | 23:36 | 19:36 | 15:24 | 07:24 | 06:00 | 31:12 | 32:00 | 33:36 | 30:36 | 29:36 | 31:36 | 19:36 |
| 0.0083 | 0.0350 | 0.0350 | 0.1475 | 0.1475 | 0.0052 | 0.0052 | 0.0052 | 0.0083 | 0.0350 | 0.0083 | 0.0350 | |
| 0.0072 | 0.0844 | 0.0208 | 0.2354 | 0.2625 | 0.0356 | 0.0030 | 0.0026 | 0.0034 | 0.0398 | 0.0031 | 0.0844 | |
| 0.6700 | 0.6700 | 0.6700 | 0.6700 | 0.6700 | 0.7100 | 0.6700 | 0.7100 | 0.6700 | 0.6700 | 0.6700 | 0.6700 | |
| 0.0001 | 0.0020 | 0.0005 | 0.0233 | 0.0260 | 0.0002 | 0.0001 | 0.0001 | 0.0001 | 0.0010 | 0.0001 | 0.0020 | |
| 0.9999 | 0.9980 | 0.9995 | 0.9767 | 0.9740 | 0.9998 | 0.9999 | 0.9999 | 0.9999 | 0.9990 | 0.9999 | 0.9980 | |
| Train Group | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| No. of passenger trains | 2 | 1 | 1 | 0 | 1 | 3 | 3 | 3 | 2 | 1 | 3 | 2 |
| No. of freight trains | 2 | 2 | 2 | 2 | 2 | 1 | 1 | 1 | 2 | 2 | 2 | 2 |
[min:s] | 23:36 | 19:36 | 15:24 | 13:24 | 06:12 | 31:12 | 26:00 | 33:36 | 30:36 | 29:36 | 31:36 | 19:36 |
| 0.0083 | 0.0350 | 0.0350 | 0.1475 | 0.0350 | 0.0052 | 0.0083 | 0.0052 | 0.0083 | 0.0350 | 0.0083 | 0.0350 | |
| 0.0072 | 0.0844 | 0.0208 | 0.1414 | 0.1004 | 0.0356 | 0.0516 | 0.0026 | 0.0034 | 0.0398 | 0.0031 | 0.0844 | |
| 0.6700 | 0.6700 | 0.6700 | 0.6700 | 0.6700 | 0.7100 | 0.6700 | 0.7100 | 0.6700 | 0.6700 | 0.6700 | 0.6700 | |
| 0.0001 | 0.0020 | 0.0005 | 0.0140 | 0.0024 | 0.0002 | 0.0003 | 0.0001 | 0.0001 | 0.0010 | 0.0001 | 0.0020 | |
| 0.9999 | 0.9980 | 0.9995 | 0.9860 | 0.9976 | 0.9998 | 0.9997 | 0.9999 | 0.9999 | 0.9990 | 0.9999 | 0.9980 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Restel, F.; Haładyn, S.M. The Railway Timetable Evaluation Method in Terms of Operational Robustness against Overloads of the Power Supply System. Energies 2022, 15, 6458. https://doi.org/10.3390/en15176458
Restel F, Haładyn SM. The Railway Timetable Evaluation Method in Terms of Operational Robustness against Overloads of the Power Supply System. Energies. 2022; 15(17):6458. https://doi.org/10.3390/en15176458
Chicago/Turabian StyleRestel, Franciszek, and Szymon Mateusz Haładyn. 2022. "The Railway Timetable Evaluation Method in Terms of Operational Robustness against Overloads of the Power Supply System" Energies 15, no. 17: 6458. https://doi.org/10.3390/en15176458
APA StyleRestel, F., & Haładyn, S. M. (2022). The Railway Timetable Evaluation Method in Terms of Operational Robustness against Overloads of the Power Supply System. Energies, 15(17), 6458. https://doi.org/10.3390/en15176458