
Using Bayesian Deep Learning for Electric Vehicle Charging Station Load Forecasting

Abstract
:1. Introduction
1.1. Background
1.2. Motivation
1.3. Related Work
1.4. Contribution and Organization of the Paper
2. Primary Challenges
3. Methodology
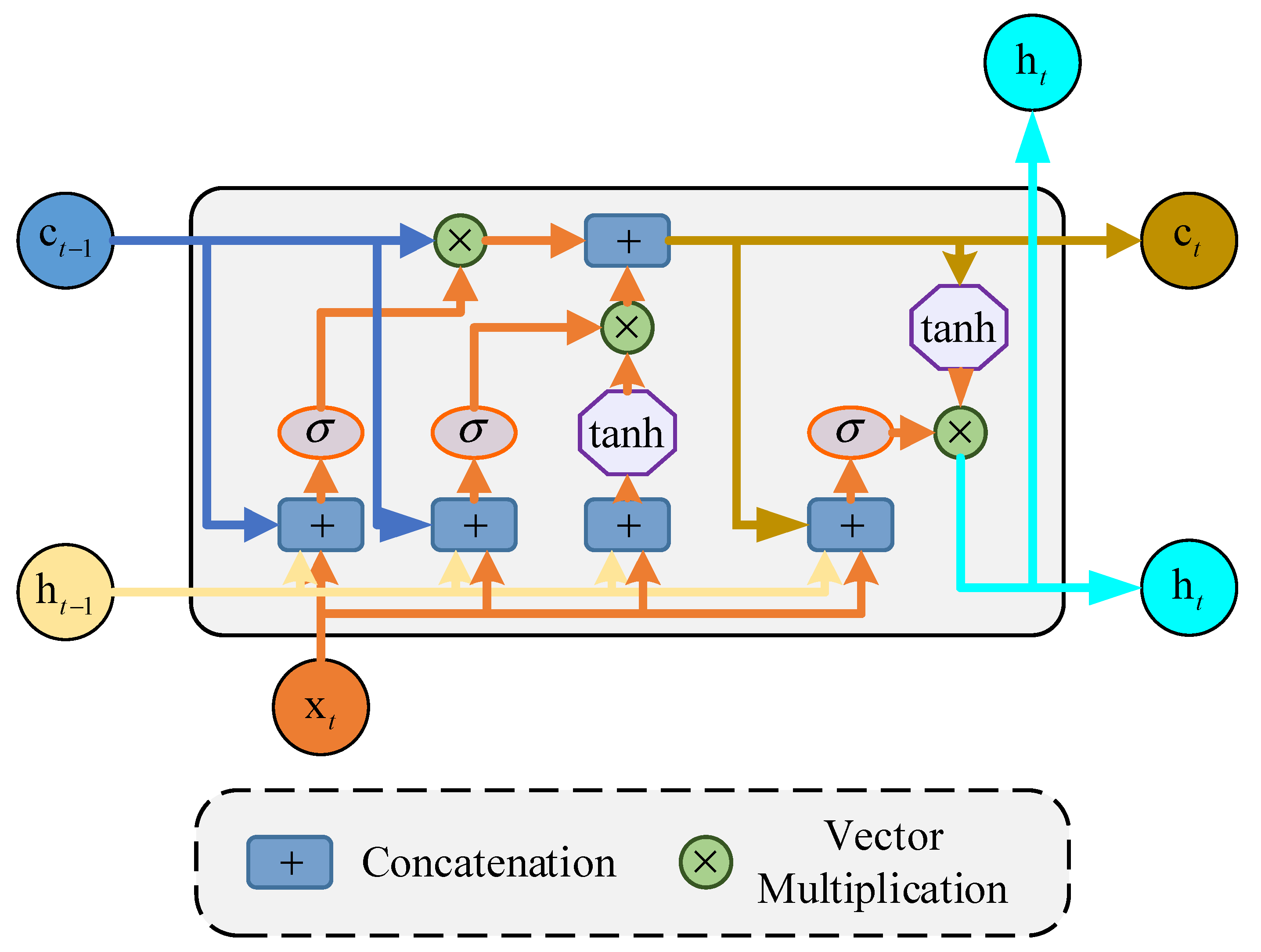
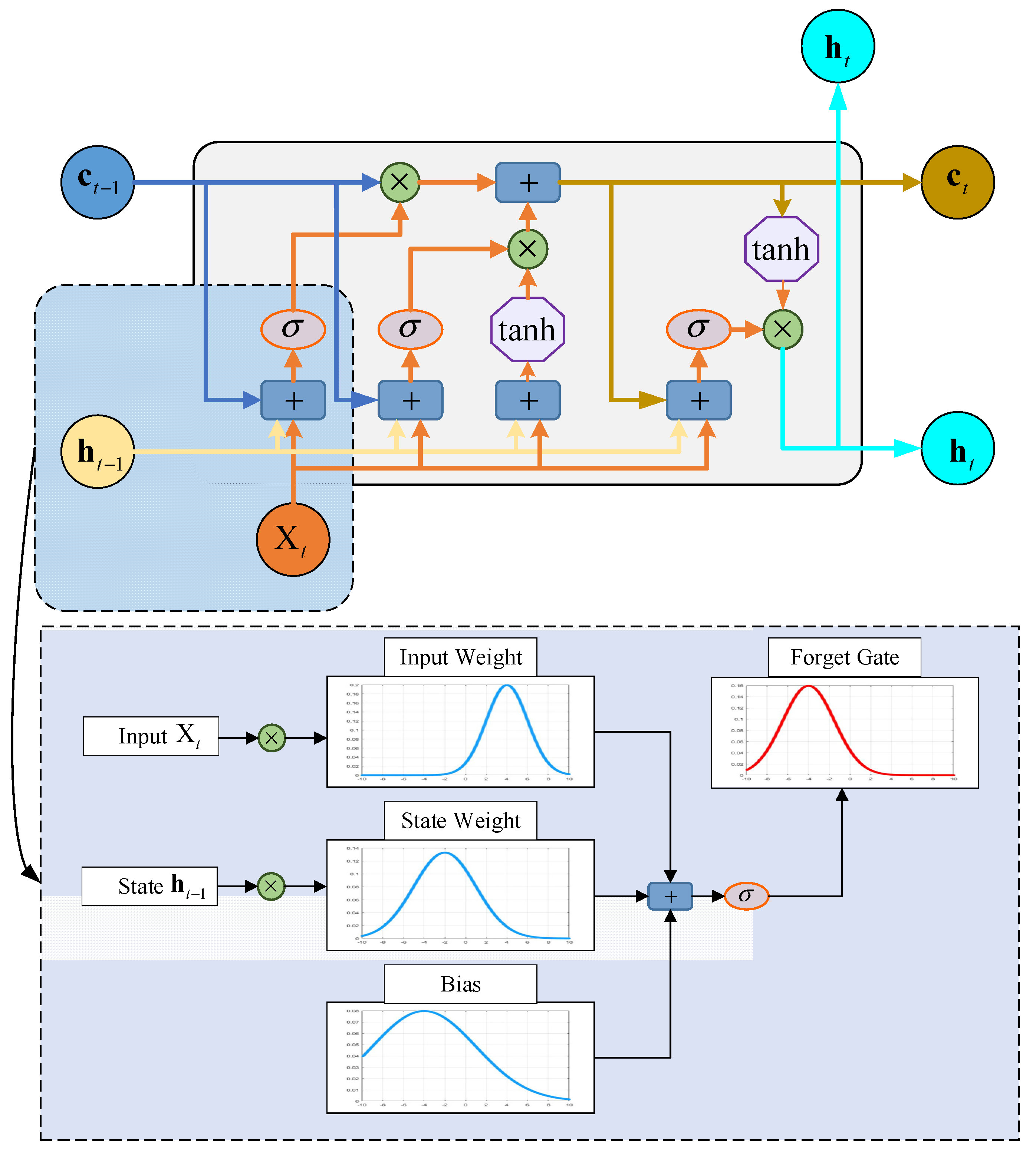
3.1. Bayesian Deep Learning Model
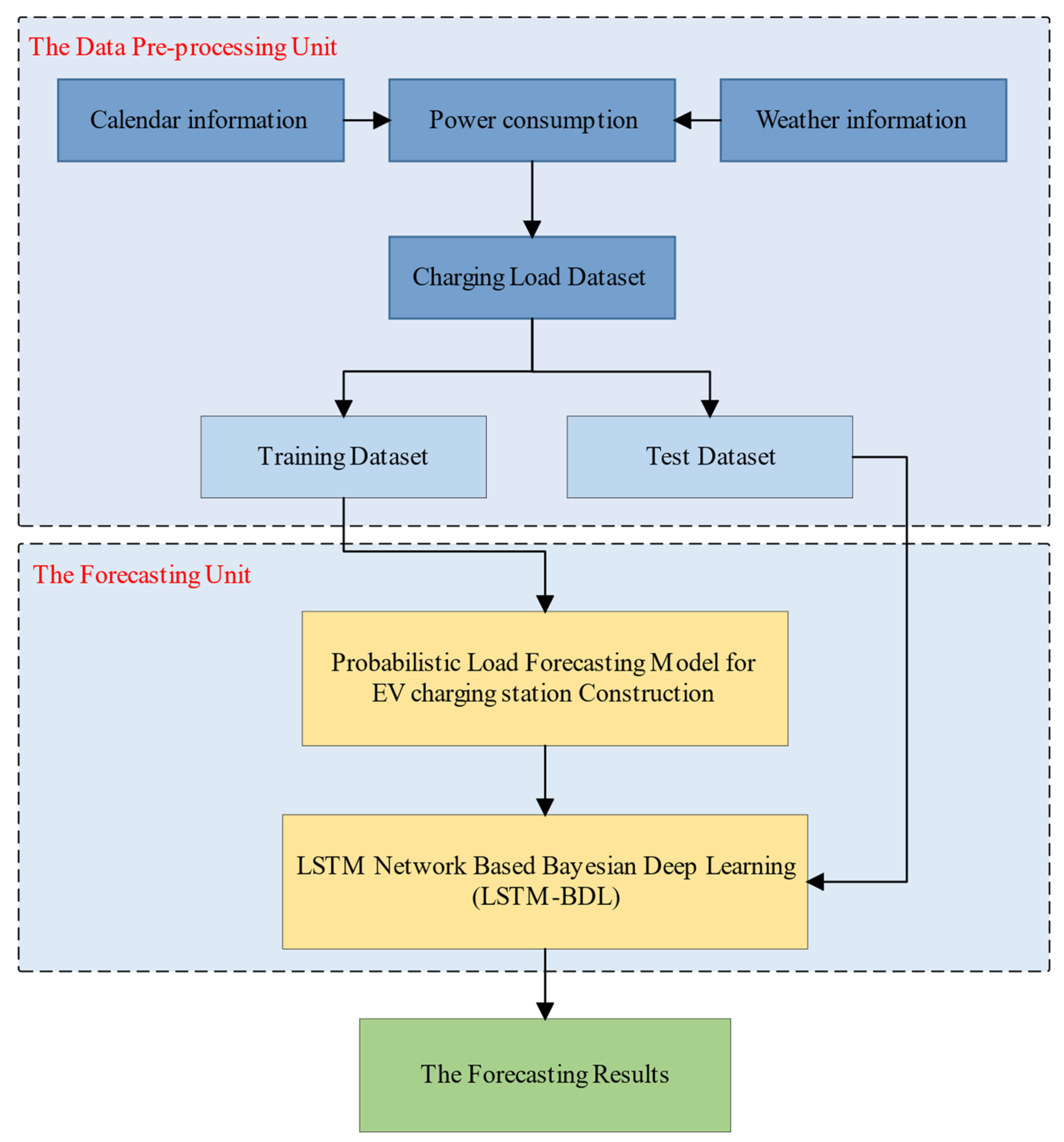
3.2. Framework of Model
3.2.1. Data Pre-Processing Unit
- (1)
- Compilation of temporal series
- (2)
- Preparation of predictors.
3.2.2. Forecasting Unit
4. Basic Setup of Experiments
4.1. Data Sources
4.2. Experimental Setup
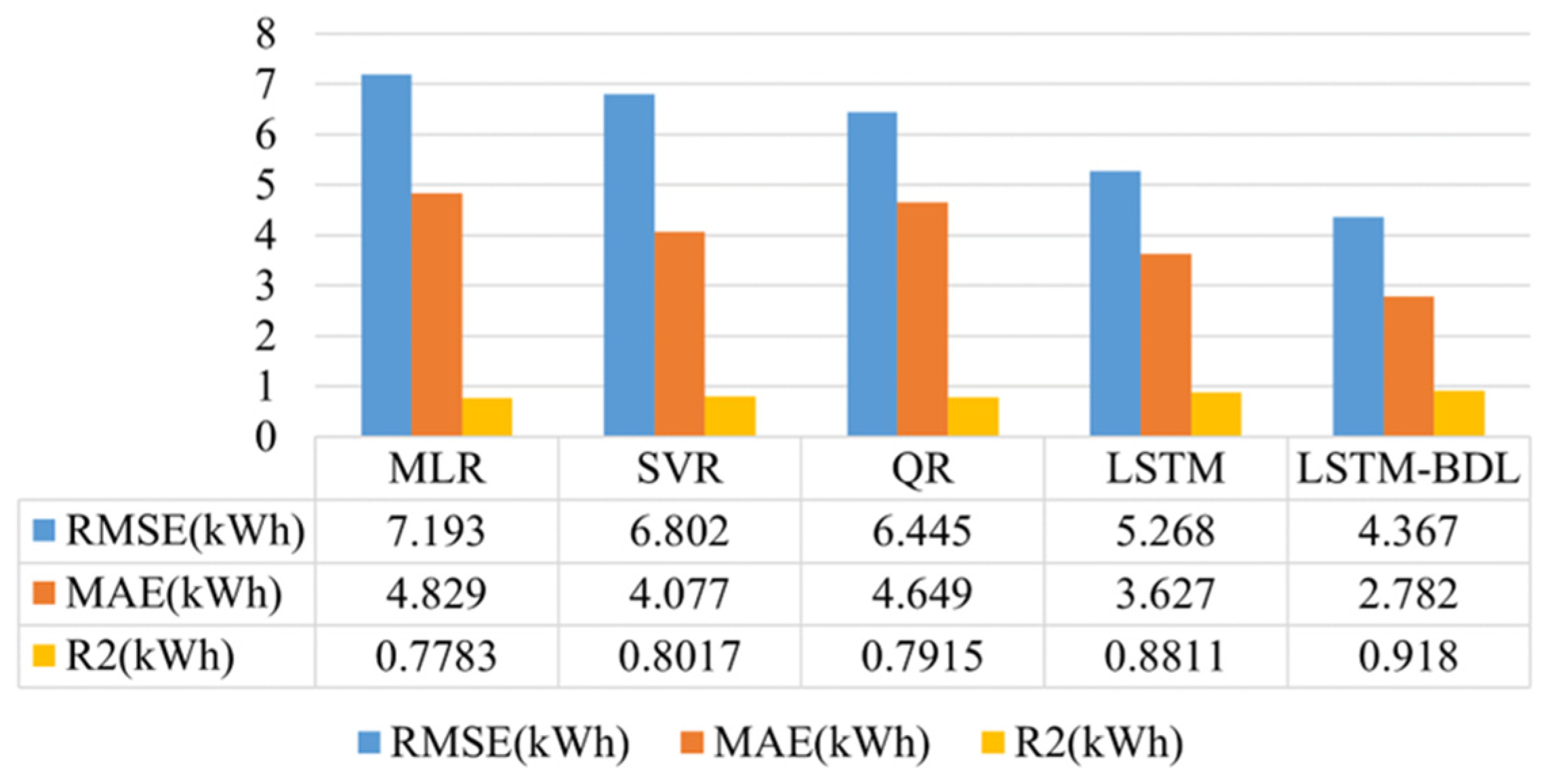
4.3. Evaluation Criteria
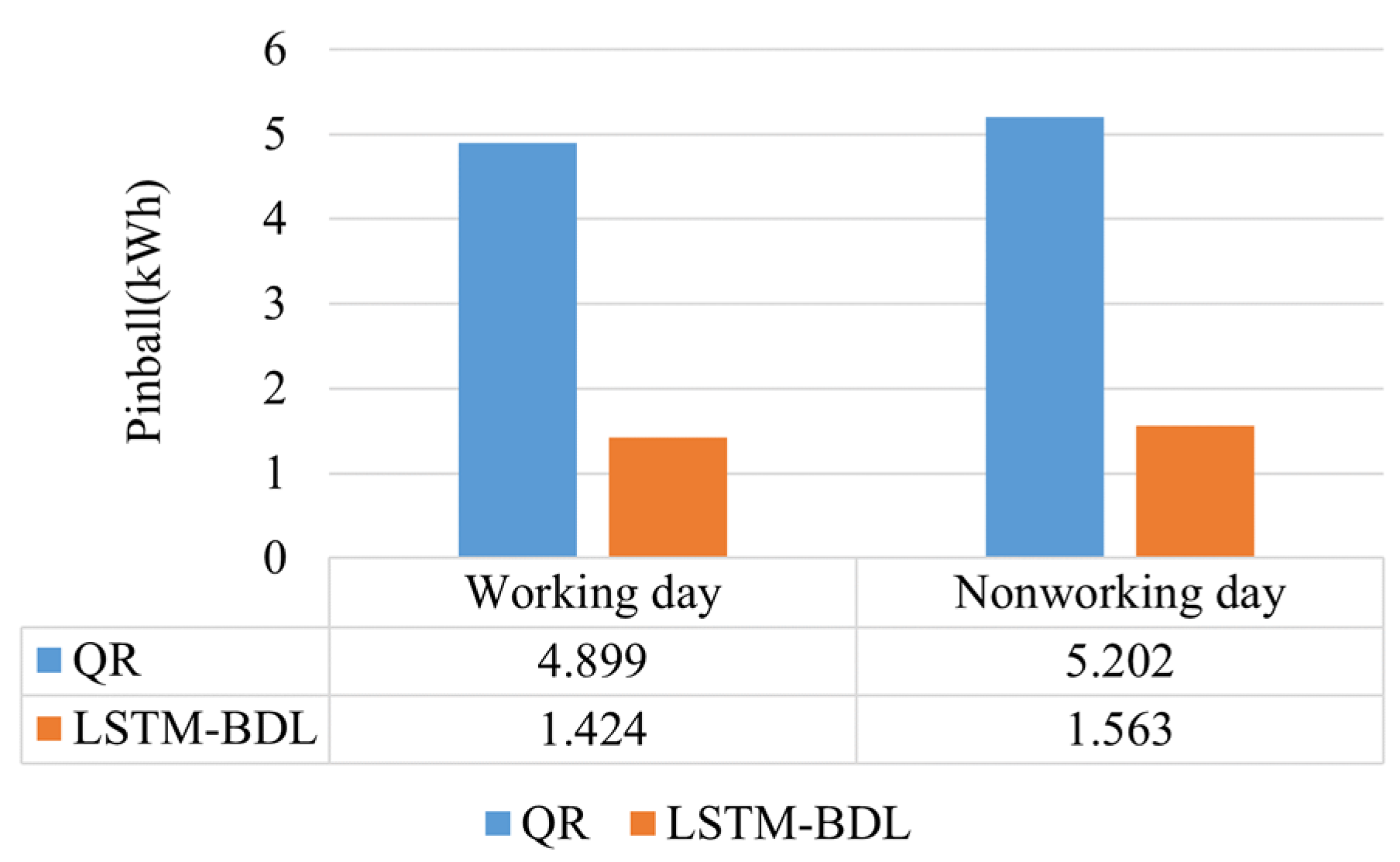
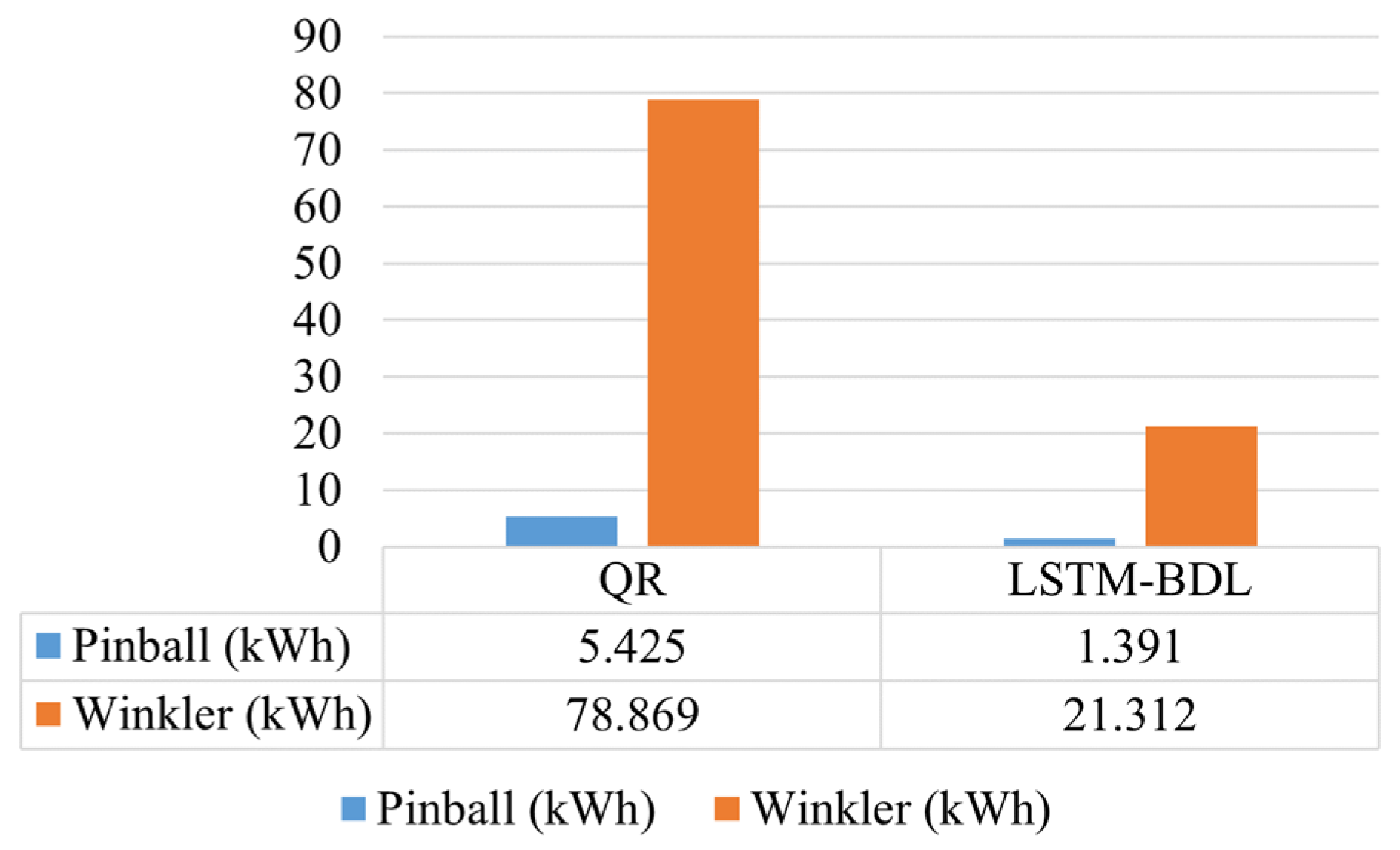
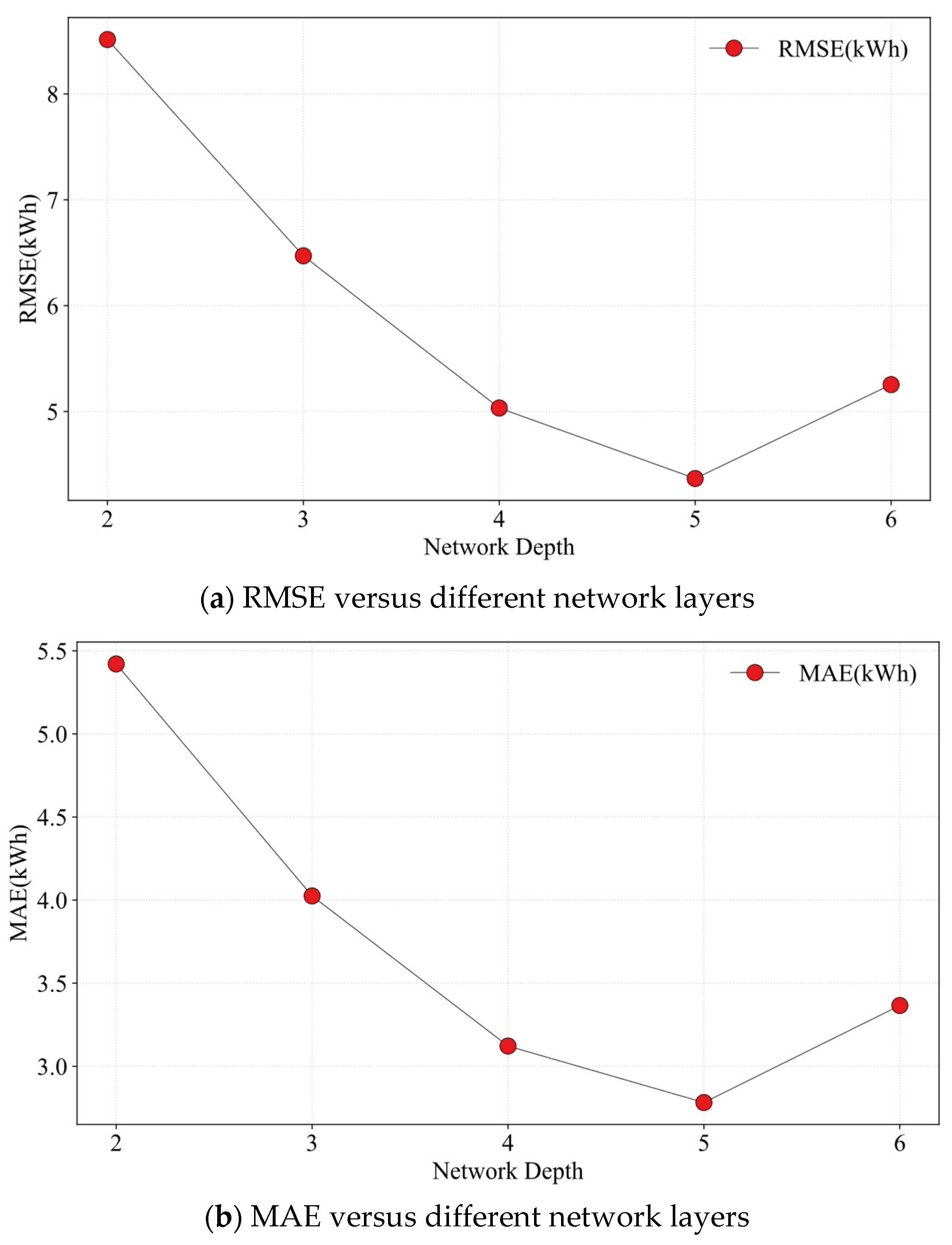
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, J.-L.; Chang, M.-C.; Tsay, H.-W. Disaggregate energy efficiency of regions in Taiwan. Manag. Environ. Qual. Int. J. 2018, 29, 34–48. [Google Scholar] [CrossRef]
- Świąder, M. The implementation of the concept of environmental carrying capacity into spatial management of cities. Manag. Environ. Qual. Int. J. 2018, 29, 1059–1074. [Google Scholar] [CrossRef]
- Global Electric Vehicle Outlook 2022. Available online: https://www.iea.org/reports/global-ev-outlook-2022 (accessed on 2 August 2022).
- Das, H.S.; Rahman, M.M.; Li, S.; Tan, C.W. Electric vehicles standards, charging infrastructure, and impact on grid integration: A technological review. Renew. Sustain. Energy Rev. 2020, 120, 109618. [Google Scholar] [CrossRef]
- Feng, C.; Liang, B.; Li, Z.; Liu, W.; Wen, F. Peer-to-Peer Energy Trading under Network Constraints Based on Generalized Fast Dual Ascent. IEEE Trans. Smart Grid 2022, 1. [Google Scholar] [CrossRef]
- Dong, X.; Yuan, K.; Song, Y.; Mu, Y.; Jia, H. A Load Forecast Method for Fast Charging Stations of Electric Vehicles on the freeway considering the information interaction. Energy Procedia 2017, 142, 2171–2176. [Google Scholar] [CrossRef]
- Islam, M.S.; Mithulananthan, N.; Hung, D.Q. A Day-Ahead Forecasting Model for Probabilistic EV Charging Loads at Business Premises. IEEE Trans. Sustain. Energy 2018, 9, 741–753. [Google Scholar] [CrossRef]
- Koyanagi, F.; Uriu, Y. A strategy of load leveling by charging and discharging time control of electric vehicles. IEEE Trans. Power Syst. 1998, 13, 1179–1184. [Google Scholar] [CrossRef]
- Zheng, Y.; Shao, Z.; Zhang, Y.; Jian, L. A systematic methodology for mid-and-long term electric vehicle charging load forecasting: The case study of Shenzhen, China. Sustain. Cities Soc. 2020, 56, 102084. [Google Scholar] [CrossRef]
- Liu, D.; Li, Z.; Jiang, J.; Cheng, X.; Wu, G. Electric Vehicle Load Forecast Based on Monte Carlo Algorithm. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020; pp. 1760–1763. [Google Scholar]
- Dai, Q.; Cai, T.; Duan, S.; Zhao, F. Stochastic Modeling and Forecasting of Load Demand for Electric Bus Battery-Swap Station. IEEE Trans. Power Deliv. 2014, 29, 1909–1917. [Google Scholar] [CrossRef]
- Wu, C.; Jiang, S.; Gao, S.; Liu, Y.; Han, H. Charging demand forecasting of electric vehicles considering uncertainties in a microgrid. Energy 2022, 247, 123475. [Google Scholar] [CrossRef]
- Wu, D.; Wang, B.Y.; Precup, D.; Boulet, B. Boosting Based Multiple Kernel Learning and Transfer Regression for Electricity Load Forecasting. In Joint European Conference on Machine Learning and Knowledge Discovery in Databases; Springer: Cham, Switzerland, 2017; pp. 39–51. [Google Scholar]
- Wu, D.; Zeng, H.; Lu, C.; Boulet, B. Two-Stage Energy Management for Office Buildings with Workplace EV Charging and Renewable Energy. IEEE Trans. Transp. Electrif. 2017, 3, 225–237. [Google Scholar] [CrossRef]
- Chen, K.; Chen, K.; Wang, Q.; He, Z.; Hu, J.; He, J. Short-Term Load Forecasting with Deep Residual Networks. IEEE Trans. Smart Grid 2019, 10, 3943–3952. [Google Scholar] [CrossRef]
- Han, J.; Yan, L.; Li, Z. A Task-Based Day-Ahead Load Forecasting Model for Stochastic Economic Dispatch. IEEE Trans. Power Syst. 2021, 36, 5294–5304. [Google Scholar] [CrossRef]
- Liao, X.Q.; Kang, X.F.; Ma, L.; Cao, N.L. IEEE. Short Term Load Forecasting and Early Warning of Charging Station Based on PSO-SVM. In Proceedings of the 2019 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS), Changsha, China, 12–13 January 2019; pp. 305–308. [Google Scholar]
- Qiming, S.; Jihong, L.; Xiaoxue, R.; Meng, Z.; Xiangqian, S.; Zhaohong, B.; Zhaorui, N. Charging load forecasting of electric vehicle charging station based on support vector regression. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 1777–1781. [Google Scholar]
- Dabbaghjamanesh, M.; Moeini, A.; Kavousi-Fard, A. Reinforcement Learning-Based Load Forecasting of Electric Vehicle Charging Station Using Q-Learning Technique. IEEE Trans. Ind. Inform. 2021, 17, 4229–4237. [Google Scholar] [CrossRef]
- Majidpour, M.; Qiu, C.; Chu, P.; Pota, H.R.; Gadh, R. Forecasting the EV charging load based on customer profile or station measurement? Appl. Energy 2016, 163, 134–141. [Google Scholar] [CrossRef]
- Huang, X.; Wu, D.; Boulet, B. Ensemble Learning for Charging Load Forecasting of Electric Vehicle Charging Stations. In Proceedings of the 2020 IEEE Electric Power and Energy Conference (EPEC), Edmonton, AB, Canada, 9–10 November 2020; pp. 1–5. [Google Scholar]
- Buzna, L.; De Falco, P.; Ferruzzi, G.; Khormali, S.; Proto, D.; Refa, N.; Straka, M.; van der Poel, G. An ensemble methodology for hierarchical probabilistic electric vehicle load forecasting at regular charging stations. Appl. Energy 2021, 283, 116337. [Google Scholar] [CrossRef]
- Xue, M.; Wu, L.; Zhang, Q.P.; Lu, J.X.; Mao, X.; Pan, Y. Research on Load Forecasting of Charging Station Based on XGBoost and LSTM Model. In Proceedings of the 2020 International Conference on Computer Big Data and Artificial Intelligence, ICCBDAI 2020, Changsha, China, 24–25 October 2020. [Google Scholar]
- Xie, F.; Huang, M.; Zhang, W.; Li, J. Research on electric vehicle charging station load forecasting. In Proceedings of the 2011 International Conference on Advanced Power System Automation and Protection, APAP 2011, Beijing, China, 16–20 October 2011; pp. 2055–2060. [Google Scholar]
- Zhu, J.C.; Yang, Z.L.; Guo, Y.J.; Zhang, J.K.; Yang, H.K. Short-Term Load Forecasting for Electric Vehicle Charging Stations Based on Deep Learning Approaches. Appl. Sci. 2019, 9, 4886. [Google Scholar] [CrossRef]
- Cui, J.; Liu, S.; Yang, J.; Ge, W.; Zhou, X.; Wang, A. A Load Combination Prediction Algorithm Considering Flexible Charge and Discharge of Electric Vehicles. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019; pp. 711–716. [Google Scholar]
- Lee, B.; Lee, H.; Ahn, H. Improving Load Forecasting of Electric Vehicle Charging Stations through Missing Data Imputation. Energies 2020, 13, 4893. [Google Scholar] [CrossRef]
- Zhang, X.; Chan, K.W.; Li, H.R.; Wang, H.Z.; Qiu, J.; Wang, G.B. Deep-Learning-Based Probabilistic Forecasting of Electric Vehicle Charging Load with a Novel Queuing Model. IEEE Trans. Cybern. 2021, 51, 3157–3170. [Google Scholar] [CrossRef]
- Wang, H.; Wang, N.Y.; Yeung, D.Y. Collaborative Deep Learning for Recommender Systems. In Proceedings of the KDD’15: Proceedings of the 21st ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Sydney, NSW, Australia, 10–13 August 2015; pp. 1235–1244. [Google Scholar]
- Gan, Z.; Chen, C.Y.; Henao, R.; Carlson, D.; Carin, L. Scalable Deep Poisson Factor Analysis for Topic Modeling. In Proceedings of the International Conference on Machine Learning, Lille, France, 7–9 July 2015; Volume 37, pp. 1823–1832. [Google Scholar]
- Sigurdsson, G.A.; Divvala, S.; Farhadi, A.; Gupta, A. IEEE. Asynchronous Temporal Fields for Action Recognition. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2017), Honolulu, HI, USA, 21–26 July 2016; pp. 5650–5659. [Google Scholar]
- Gal, Y. Uncertainty in Deep Learning. Ph.D. Thesis, University of Cambridge, Cambridge, UK, 2016. [Google Scholar]
- Wang, H.; Mao, C.; He, H.; Zhao, M.; Jaakkola, T.S.; Katabi, D. Aaai. Bidirectional Inference Networks: A Class of Deep Bayesian Networks for Health Profiling. In Proceedings of the Thirty-Third Aaai Conference on Artificial Intelligence/Thirty-First Innovative Applications of Artificial Intelligence Conference/Ninth Aaai Symposium on Educational Advances in Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; pp. 766–773. [Google Scholar]
- Tansey, W.; Wang, Y.; Blei, D.M.; Rabadan, R. Black Box FDR. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; Volume 80. [Google Scholar]
- Krishnan, R.G.; Shalit, U.; Sontag, D. Aaai. Structured Inference Networks for Nonlinear State Space Models. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; pp. 2101–2109. [Google Scholar]
- Henao, R.; Lu, J.T.; Lucas, J.E.; Ferranti, J.; Carin, L. Electronic Health Record Analysis via Deep Poisson Factor Models. J. Mach. Learn. Res. 2016, 17, 6422–6453. [Google Scholar]
- Shi, H.; Xu, M.H.; Li, R. Deep Learning for Household Load Forecasting—A Novel Pooling Deep RNN. IEEE Trans. Smart Grid 2018, 9, 5271–5280. [Google Scholar] [CrossRef]
- Garthwaite, P.H.; Kadane, J.B.; O’Hagan, A. Statistical methods for eliciting probability distributions. J. Am. Stat. Assoc. 2005, 100, 680–700. [Google Scholar] [CrossRef]
- Mackay, D.J.C. Bayesian Methods for Adaptive Models; California Institute of Technology: Pasadena, CA, USA, 1992. [Google Scholar]
- Boshnakov, G.N. Introduction to Time Series Analysis and Forecasting, 2nd ed.; Wiley Series in Probability and Statistics; Montgomery, D.C., Jennings, C.L., Kulahci, M., Eds.; John Wiley and Sons: Hoboken, NJ, USA, 2015; p. 672. ISBN 978-1-118-74511-3. [Google Scholar] [CrossRef]
- Lee, Z.J.; Li, T.X.; Low, S.; Assoc Comp, M. ACN-Data: Analysis and Applications of an Open EV Charging Dataset. In Proceedings of the E-Energy’19: Proceedings of the 10th ACM International Conference on Future Energy Systems, Phoenix, AZ, USA, 25—28 June 2019; pp. 139–149. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Abadi, M. TensorFlow: Learning functions at scale. In Proceedings of the 21st ACM SIGPLAN International Conference on Functional Programming, Nara, Japan, 18–24 September 2016; p. 1. [Google Scholar]
- Tran, D.; Dusenberry, M.; van der Wilk, M.; Hafner, D. Bayesian layers: A module for neural network uncertainty. Adv. Neural Inf. Process. Syst. 2019, 32, 14660–14672. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Description |
|---|---|
| connectionTime | Time when the user plugs in. |
| doneChargingTime | Time of the last non-zero charging rate. |
| disconnectTime | Time when the user unplugs. |
| kWhDelivered | Measured Energy Delivered. |
| sessionID | Unique identifier for the session. |
| stationID | Unique identifier of the EV Supply Equipment. |
| Layer of LSTM-BDL | CPU Time (s) |
|---|---|
| 2 | 507.28 |
| 3 | 857.43 |
| 4 | 1392.57 |
| 5 | 1985.63 |
| 6 | 2284.89 |
| LSTM-BDL | QR | |
|---|---|---|
| RMSE | 5.033 | 8.695 |
| MAE | 3.366 | 6.349 |
| Pinball | 2.851 | 6.782 |
| Winkler | 23.217 | 81.864 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, D.; Guo, Z.; Xie, Y.; Hu, Y.; Jiang, D.; Feng, Y.; Liu, D. Using Bayesian Deep Learning for Electric Vehicle Charging Station Load Forecasting. Energies 2022, 15, 6195. https://doi.org/10.3390/en15176195
Zhou D, Guo Z, Xie Y, Hu Y, Jiang D, Feng Y, Liu D. Using Bayesian Deep Learning for Electric Vehicle Charging Station Load Forecasting. Energies. 2022; 15(17):6195. https://doi.org/10.3390/en15176195
Chicago/Turabian StyleZhou, Dan, Zhonghao Guo, Yuzhe Xie, Yuheng Hu, Da Jiang, Yibin Feng, and Dong Liu. 2022. "Using Bayesian Deep Learning for Electric Vehicle Charging Station Load Forecasting" Energies 15, no. 17: 6195. https://doi.org/10.3390/en15176195
APA StyleZhou, D., Guo, Z., Xie, Y., Hu, Y., Jiang, D., Feng, Y., & Liu, D. (2022). Using Bayesian Deep Learning for Electric Vehicle Charging Station Load Forecasting. Energies, 15(17), 6195. https://doi.org/10.3390/en15176195