
Speed Control of Switched Reluctance Motor Based on Regulation Region of Switching Angle



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- A control strategy that does not depend on the exact model of switched reluctance motor is designed, which provides a feasible algorithm for switched reluctance motor control.
- (2)
- According to the characteristics of the switched reluctance motor, the turn-off angle control algorithm based on the optimal freewheeling zero point, the turn-on angle control algorithm based on the optimized current waveform, and the voltage PWM speed regulation control algorithm based on the model-free adaptive control are designed. The control strategies of three key parameters are designed, respectively, which greatly reduces the degree of coupling among them and simplifies the control algorithm.
- (3)
- The control strategy proposed in this paper can realize the speed tracking control of switched reluctance motor, especially suitable for driving loads with sudden large torque ripple.
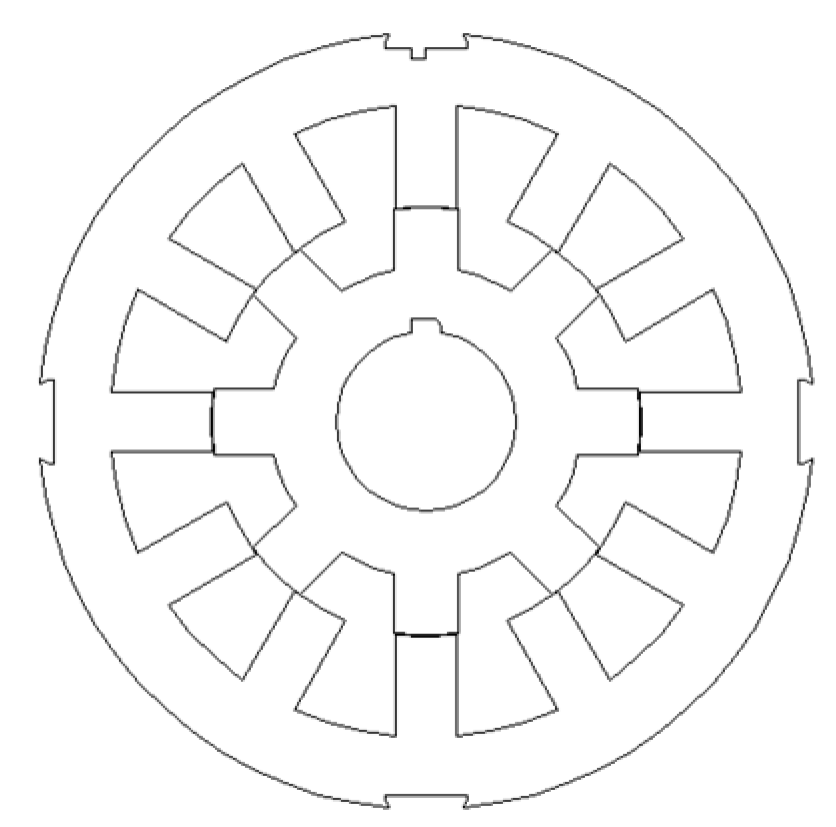
2. Linear Model Analysis of Switched Reluctance Motor
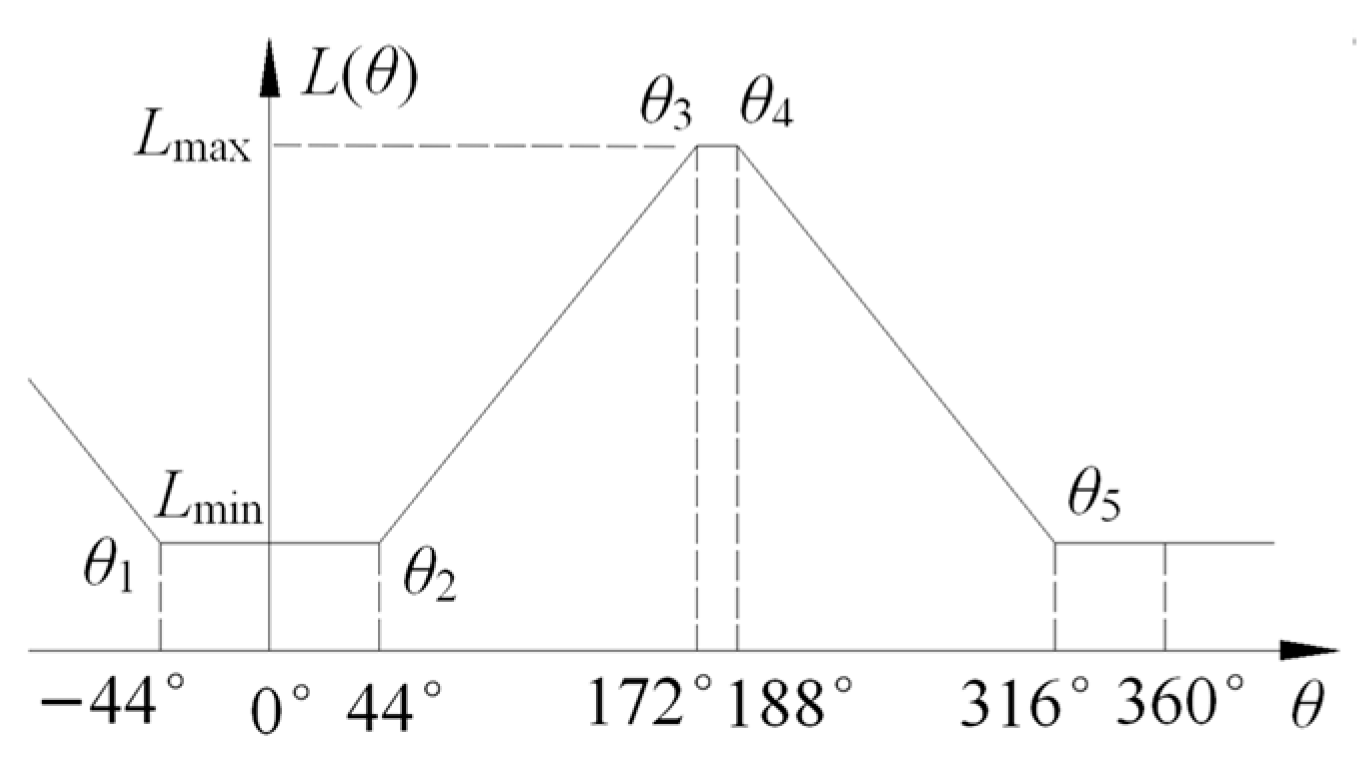
2.1. Linear Inductance Model of One Phase Winding
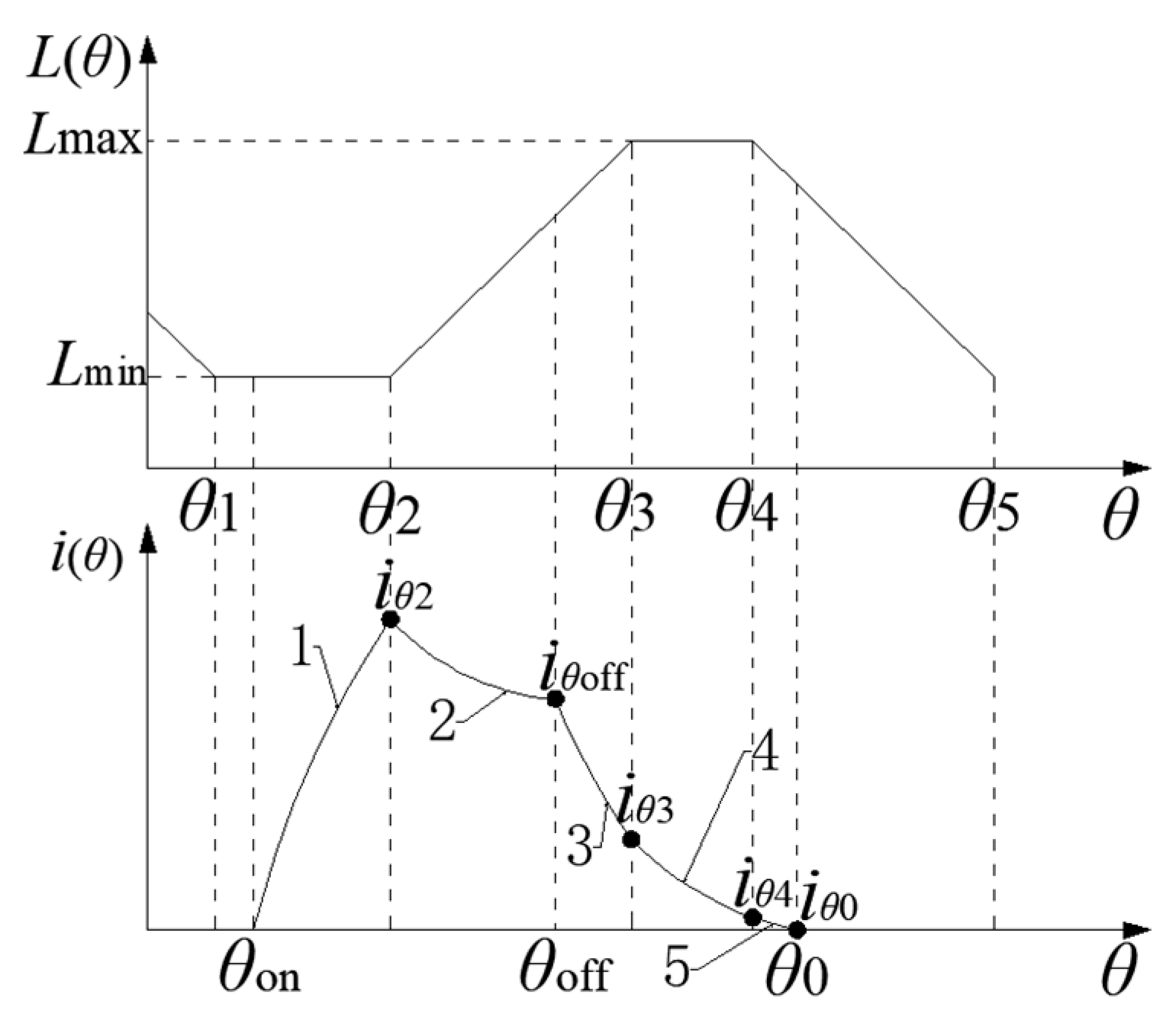
2.2. APC Control Analysis Based on Linear Inductance Model
2.2.1. Current Analysis of Section [θ1, θ2]
2.2.2. Current Analysis of Section [θ2, θoff]
- (1)
- θon < θ2 − Lmin/K
- (2)
- θon = θ2 − Lmin/K
- (3)
- θon > θ2 − Lmin/K
2.2.3. Current Analysis Current Analysis of Section [θoff, θ3]
2.2.4. Current Analysis of Section [θ3, θ4]
2.2.5. Efficiency Analysis of Motors in APC Mode
2.2.6. Analysis of Optimal Turn-Off Angle
3. Switched Reluctance Motor Control Considering Nonlinearity
3.1. Simulation Analysis of Nonlinear Inductance Model
- (1)
- The position angle θ2, θ3, θ4, θ5 is given according to the structural dimensions of the motor, and there is no clear dividing line for the inductance curve during the actual operation of the motor.
- (2)
- With the increase in winding current, the rising slope of inductance in the effective working range gradually decreases. Although the winding current increases, the output torque does not increase in proportion to the square of the current.
- (3)
- Generally, the maximum inductance range of switched reluctance motor is designed to be small, and the inductance in this region is an approximately flat top wave when the motor is running. With the increase in rotor position angle θ, the inductance gradually increases in section [θ2, θ3], with the increase in load current, the saturation degree of the inductance becomes more and more serious, resulting in a gradual decline in the inductance, showing nonlinear characteristics. From the point of view of a switched reluctance motor design, this saturation characteristic is necessary, which is conducive to the performance of the switched reluctance motor, which determines that the switched reluctance motor has the characteristics of saturation and nonlinearity. With the increase in load current, the saturation degree of the maximum inductance section becomes more serious, and the inductance value decreases gradually, which is equivalent to increasing the width of the maximum inductance section.
- (4)
- After the switch tube of phase winding is turned off, the winding current gradually decreases, and the winding inductance will gradually withdraw from saturation, so the current in the inductance range [θoff, θ3] can also output large torque.
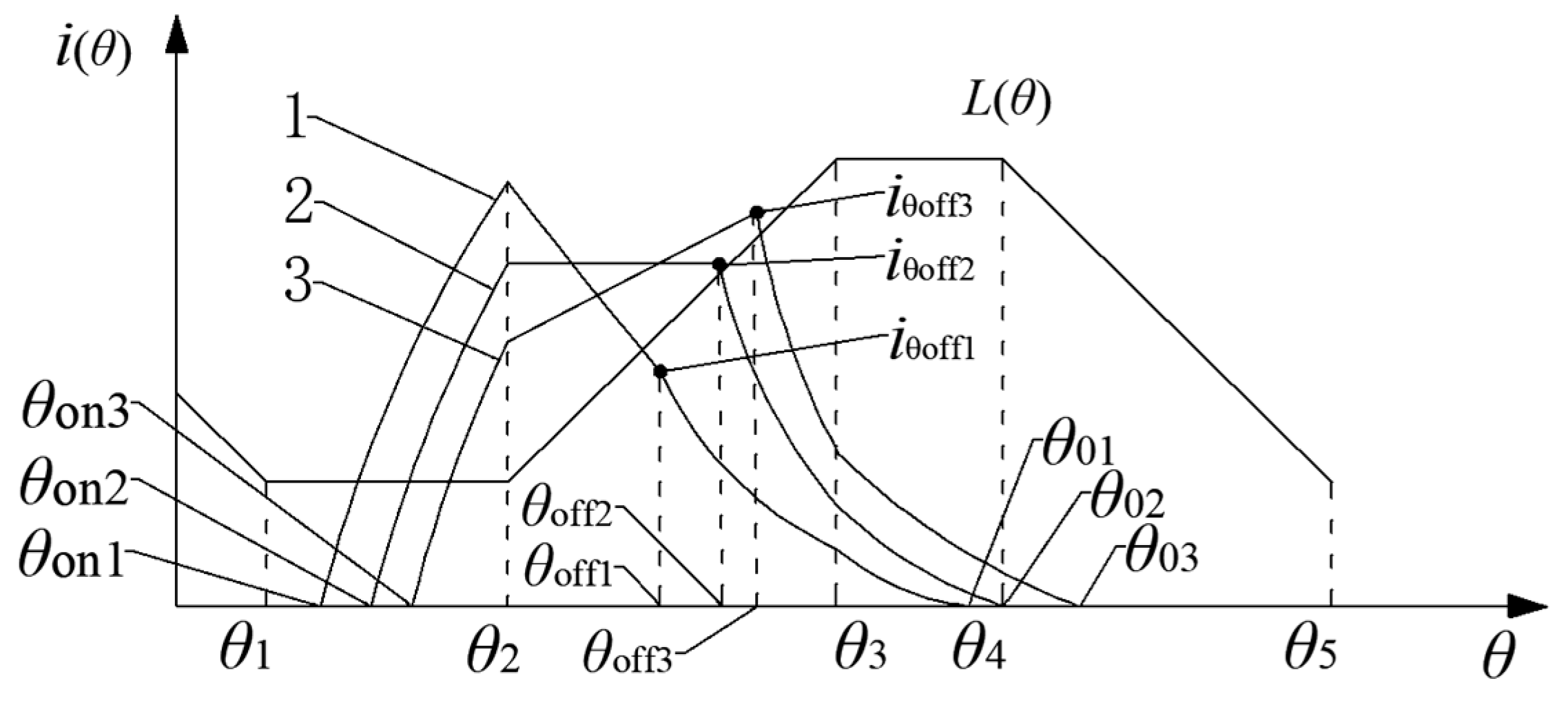
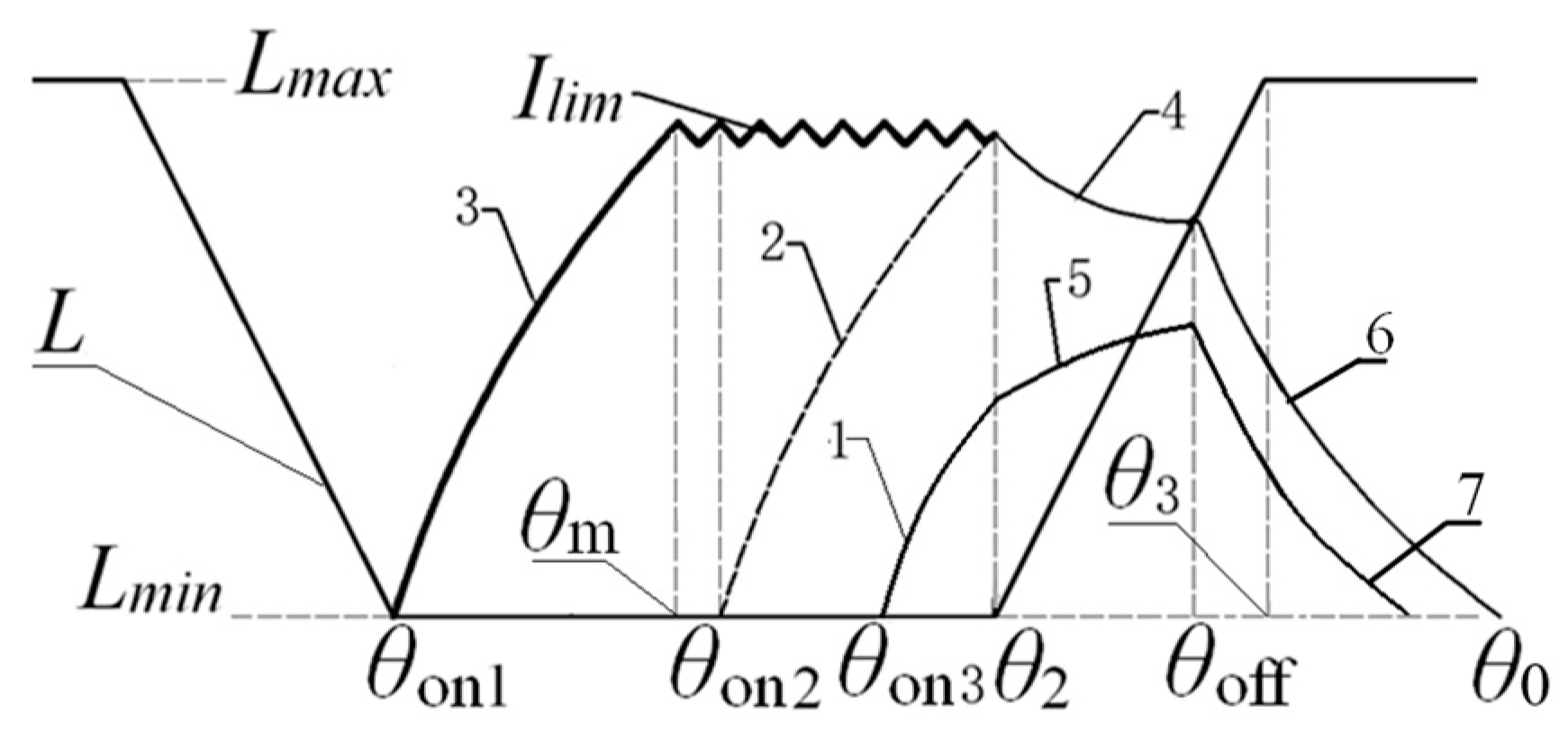
3.2. Switching Angle Control Considering Nonlinear Characteristics
3.2.1. Optimal Winding Current Waveform
3.2.2. Optimal Control of Turn-On Angle θon
3.2.3. Optimal Control of Turn-Off Angle
3.3. Switching Angle Control Considering Nonlinear Characteristics
3.3.1. Compact Linearized Nonparametric Models for Nonlinear Systems
- (1)
- The switched reluctance motor is a continuous motion system, and its dynamic system satisfies certain smoothness conditions.
- (2)
- When the bounded DPWM is input, the speed ωf of the motor does not exceed the allowable range, that is, when the generalized Lipschitz condition is satisfied, the bounded change in the system input will inevitably cause bounded change in the system.
3.3.2. Model-Free Adaptive Control Law Design
3.3.3. Estimation Algorithms of Pseudo Partial Derivatives
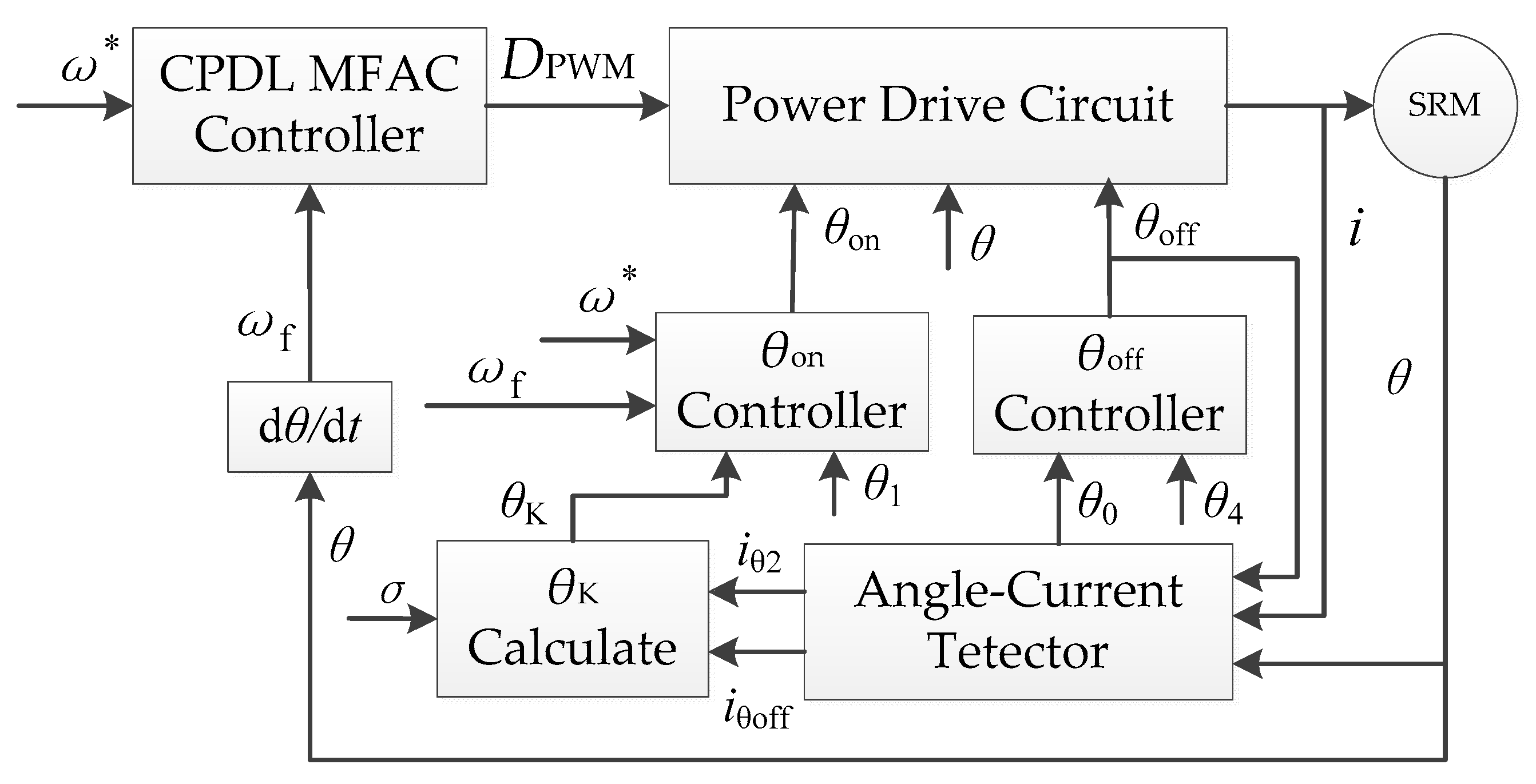
4. Control System Design
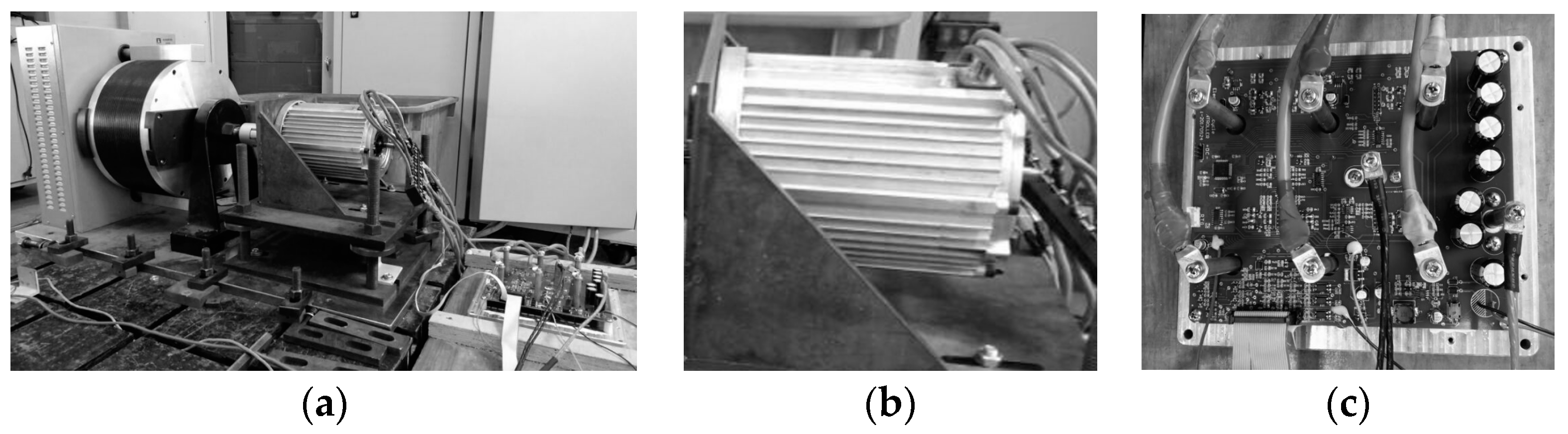
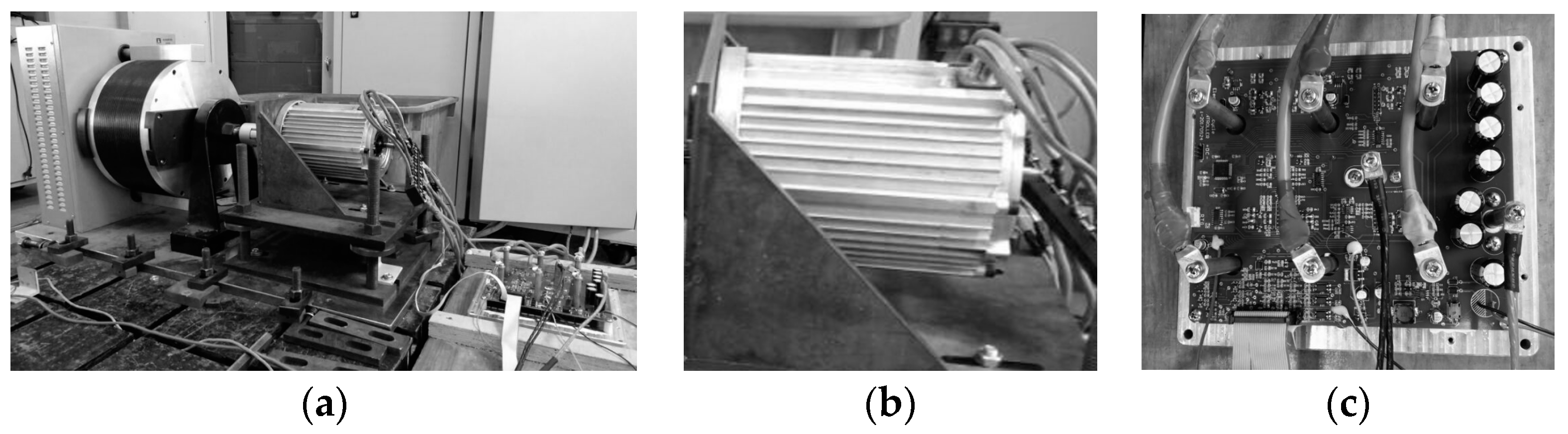
5. Experimental Test
5.1. Experimental Prototype
5.2. Speed Regulation Performance Experiment
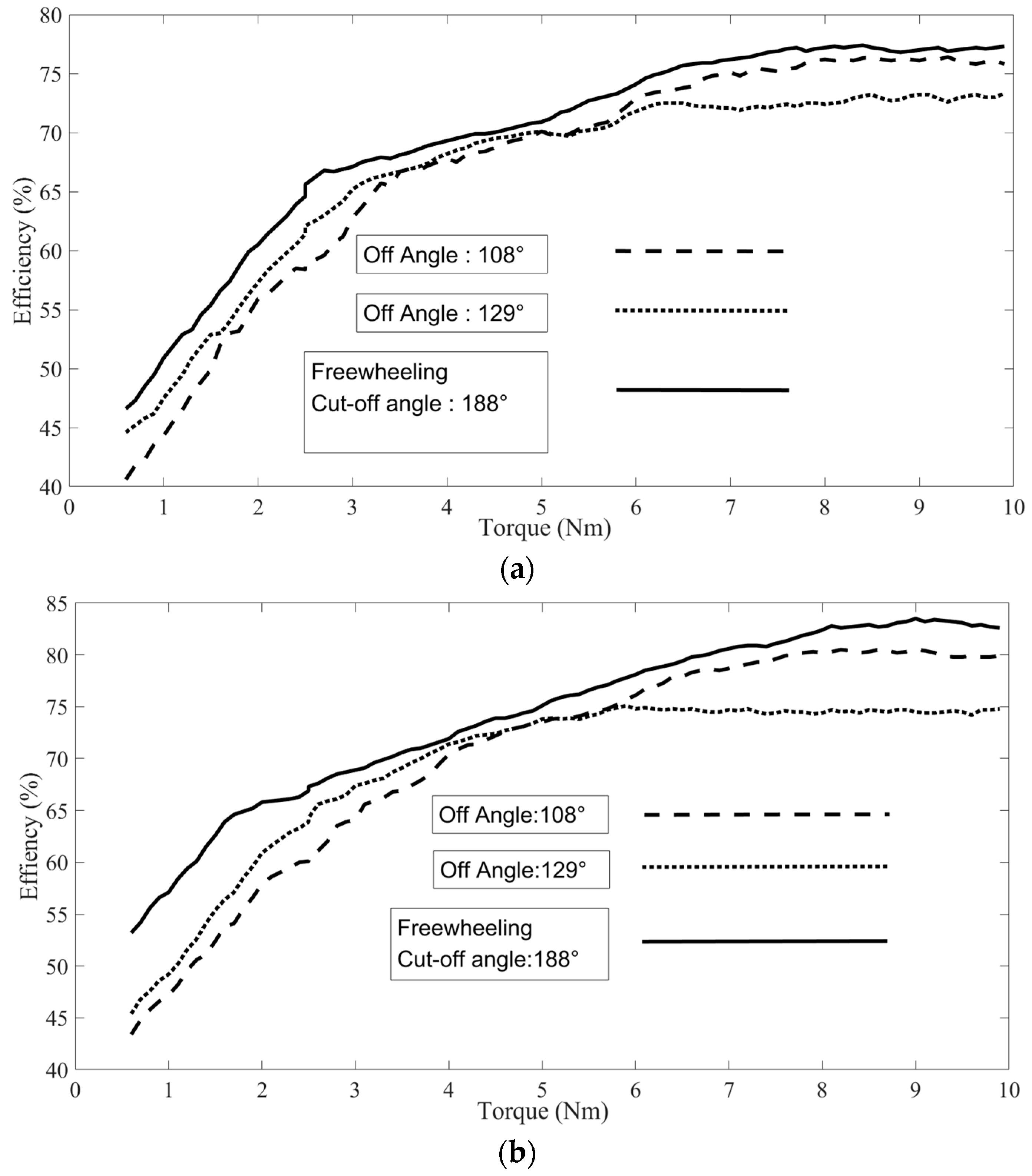
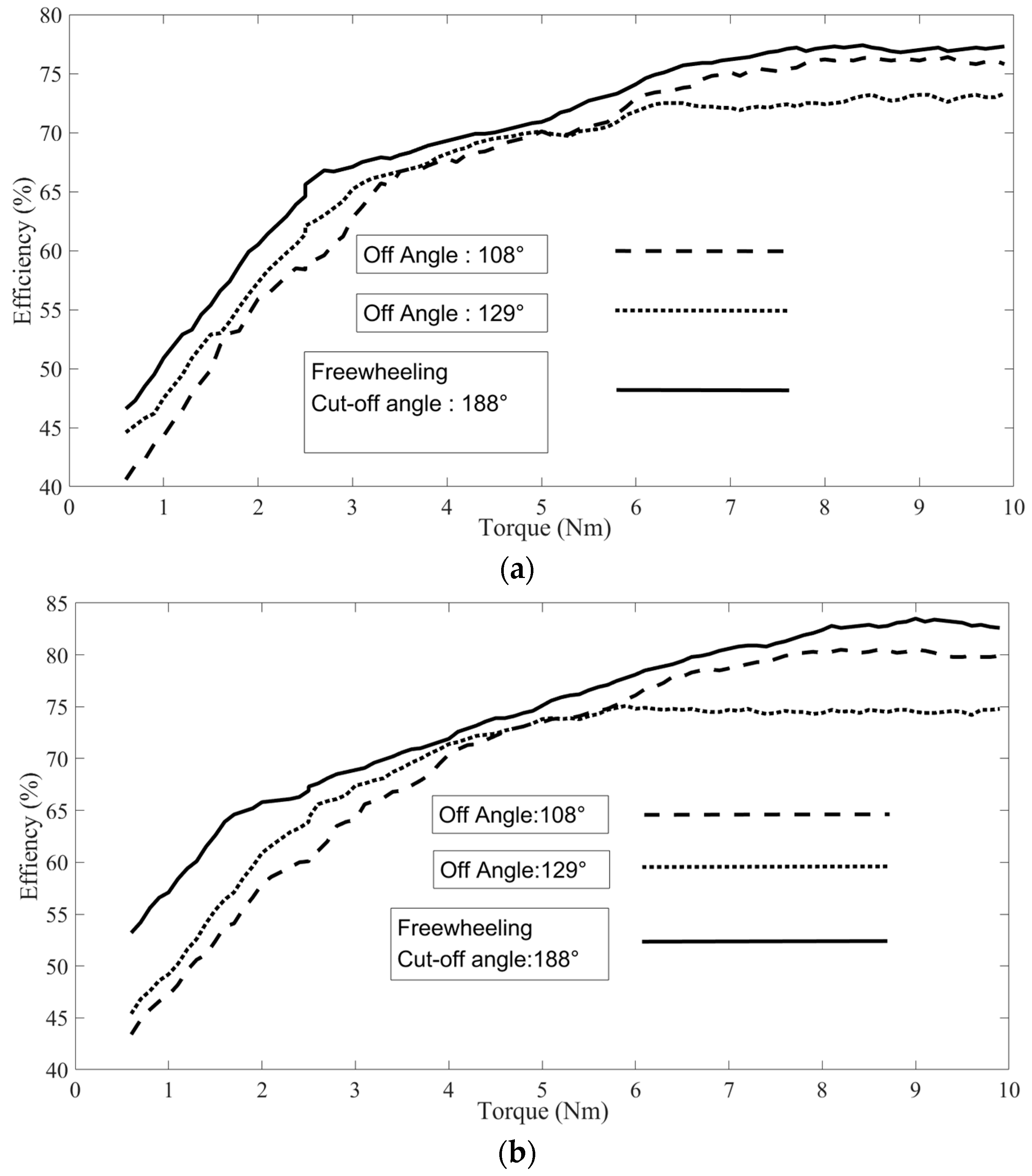
5.2.1. Control Test of Turn-Off Angle
- (1)
- Efficiency comparison of different rotating speeds and shut-off angles
- (2)
- Comparative test of different cut-off angles at the same speed
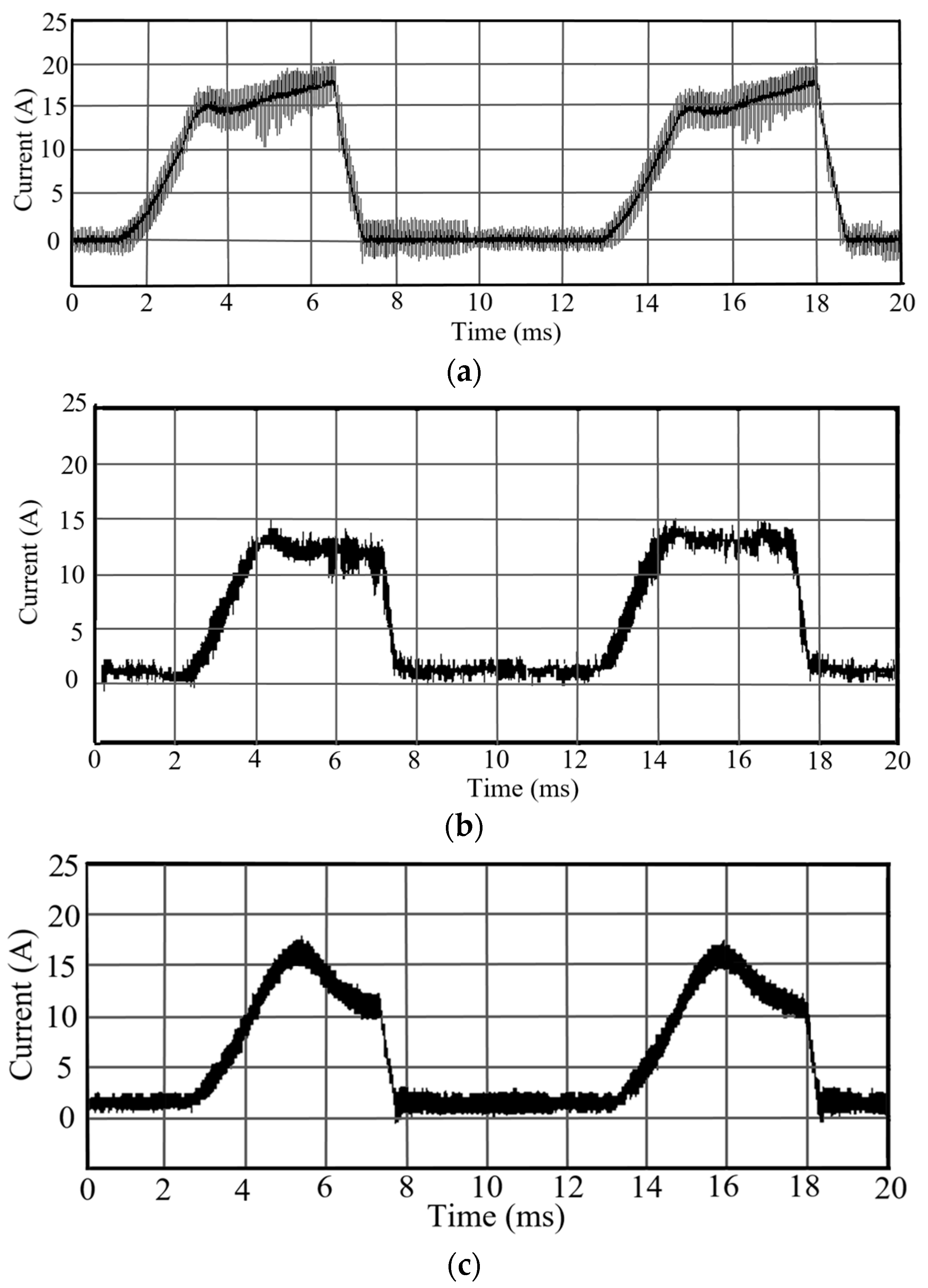
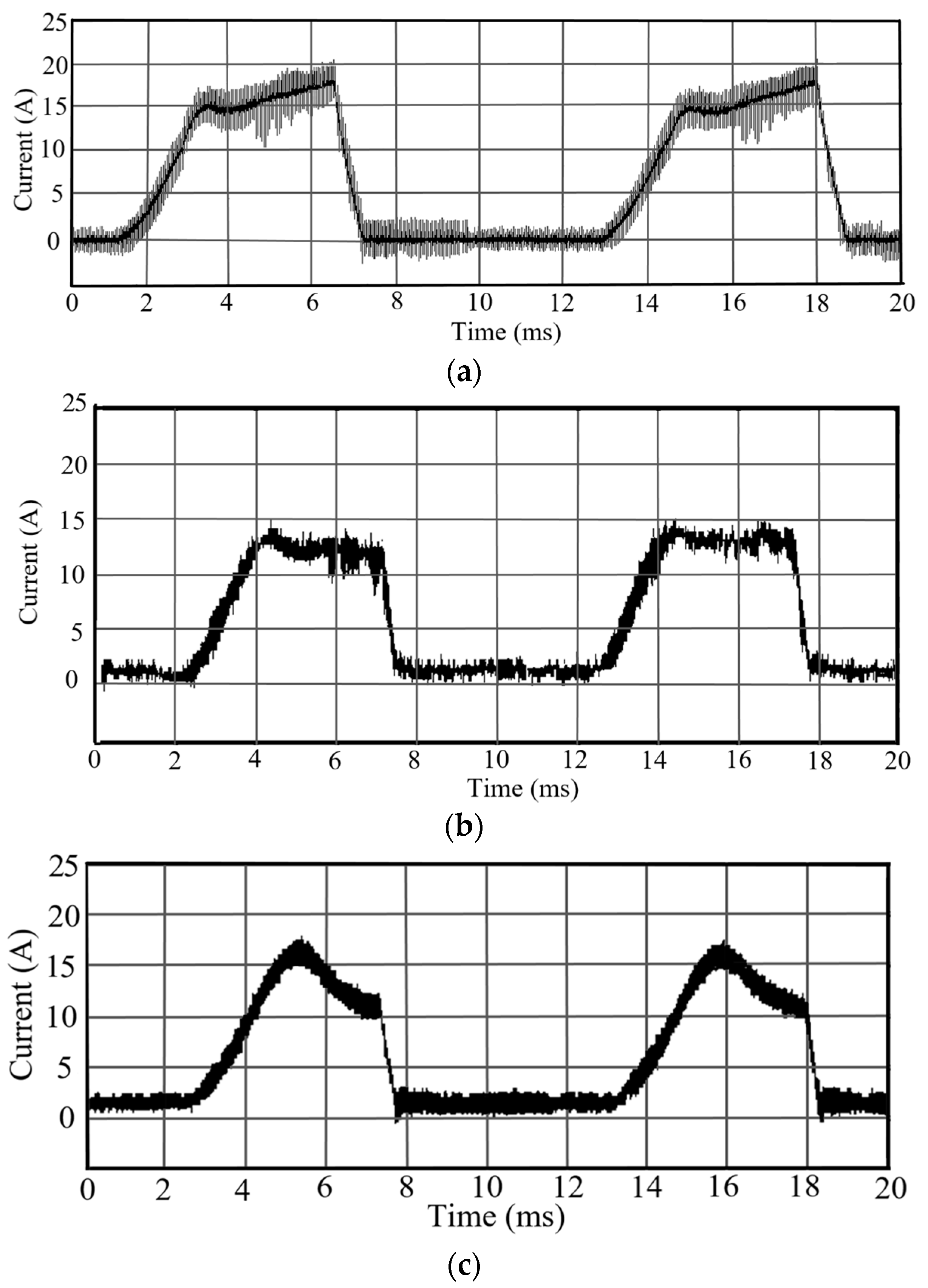
5.2.2. Control Test of Turn-On Angle
- (1)
- Current waveform test with fixed turn-on angle
- (2)
- Tests with the same load torque and different rotational speeds
- (3)
- Current waveforms with the same rotational speed and different load torques
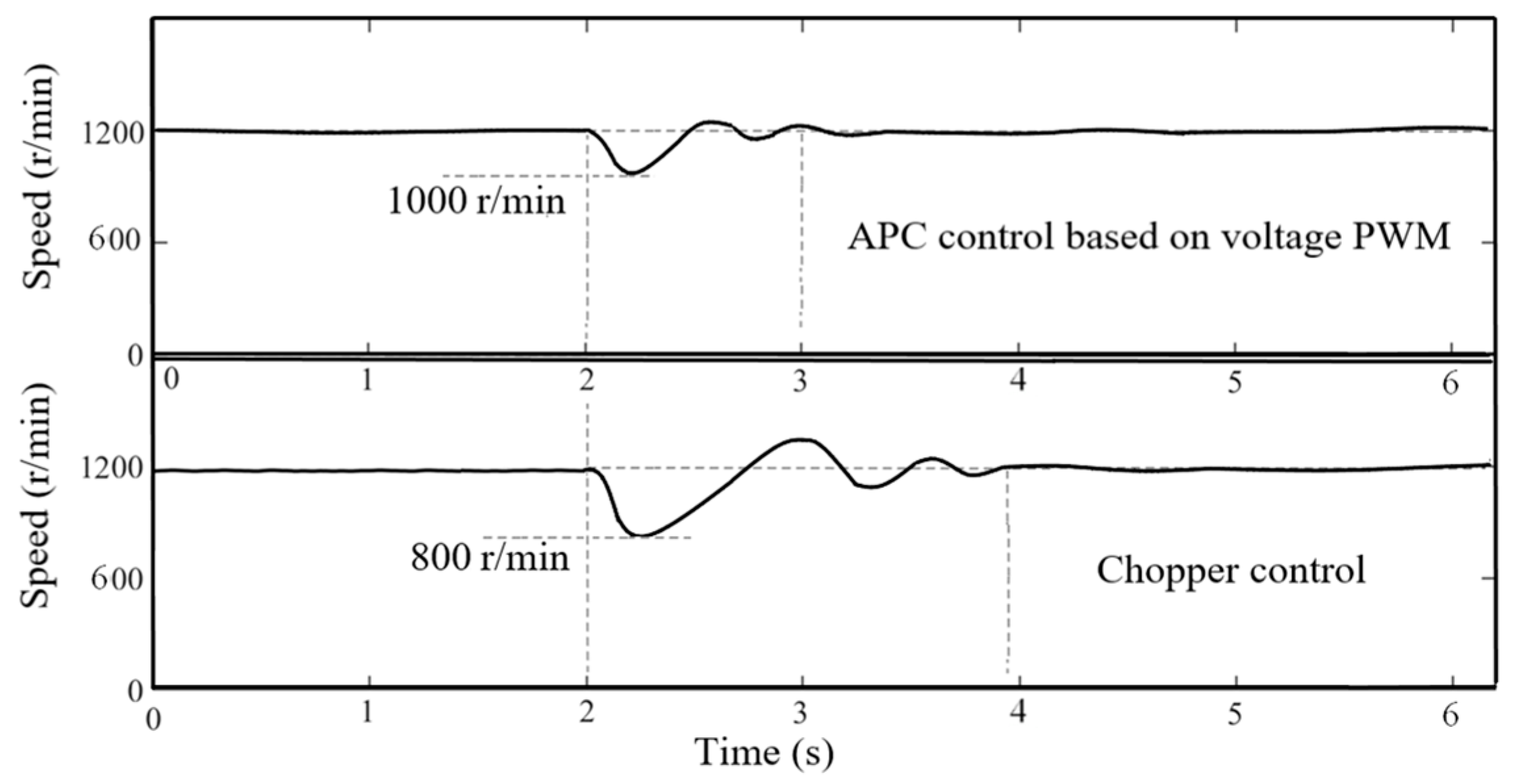
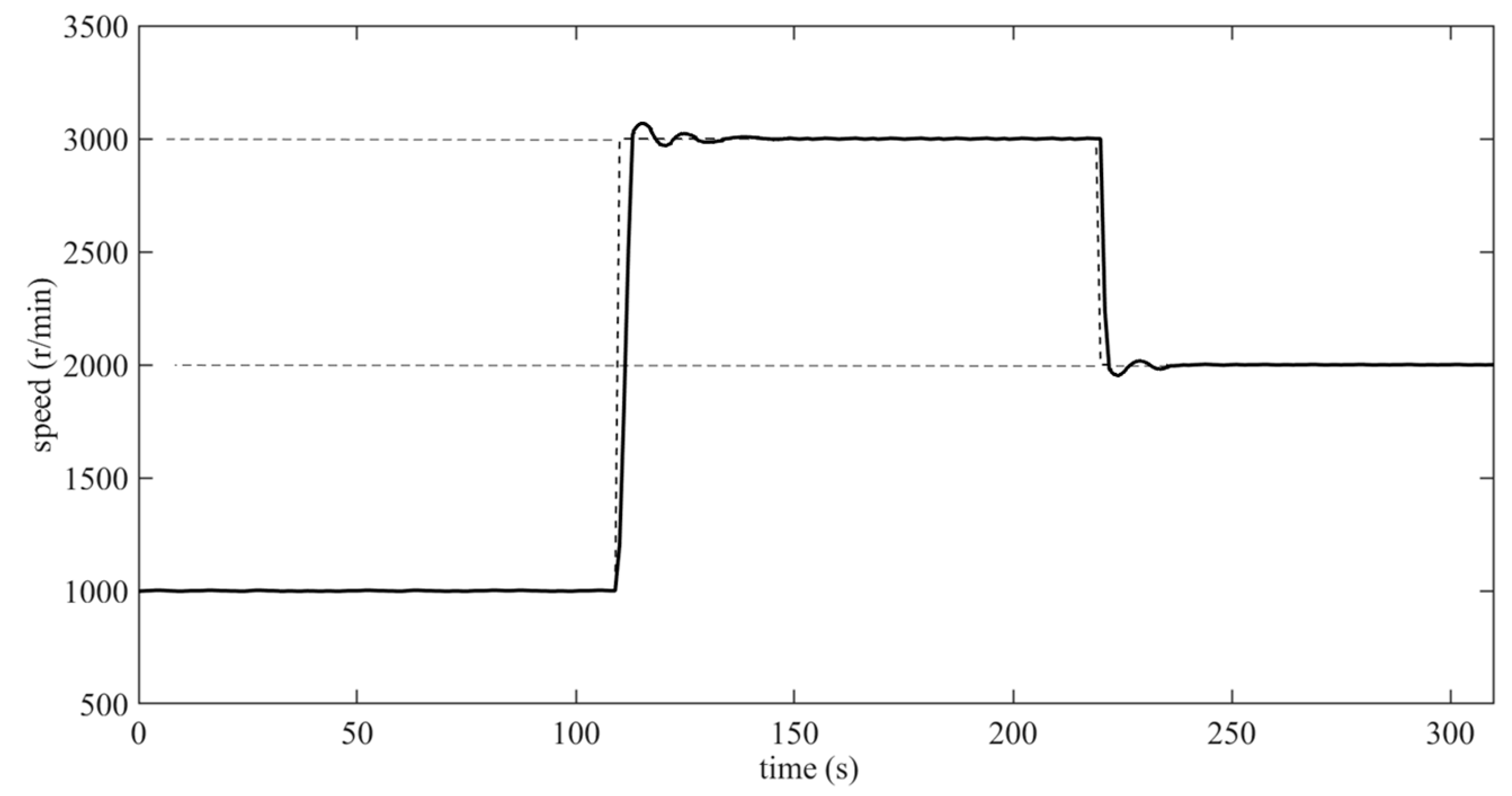
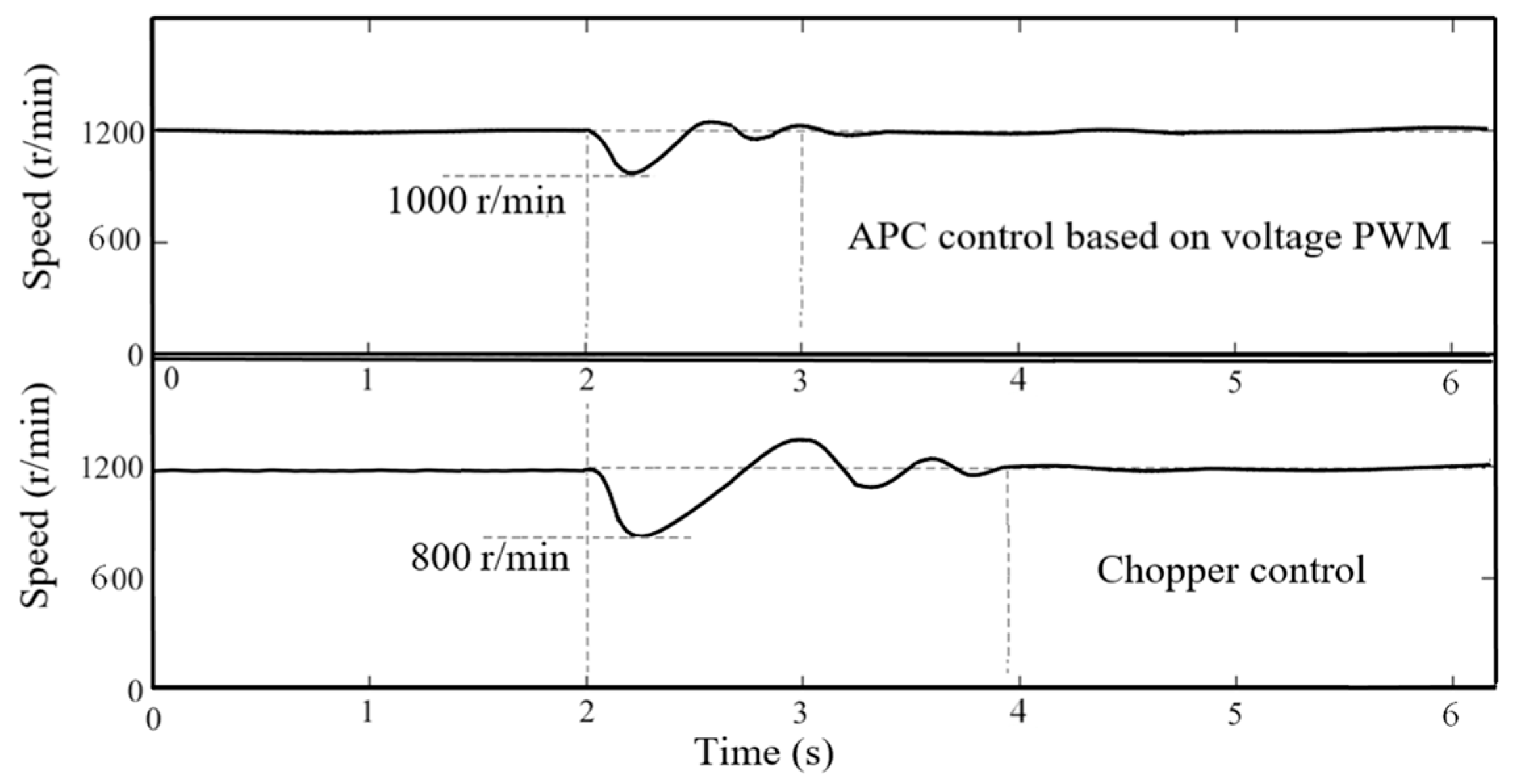
5.2.3. Speed Control Test
- (1)
- Constant torque load test
- (2)
- Sudden Torque Test
5.3. Test Conclusion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bilgin, B.; Howey, B.; Callegaro, A.D.; Liang, J.; Kordic, M.; Taylor, J.; Emadi, A. Making the Case for Switched Reluctance Motors for Propulsion Applications. IEEE Trans. Veh. Technol. 2020, 69, 7172–7186. [Google Scholar] [CrossRef]
- Bieńkowski, K.; Łapczyński, S.; Szulborski, M.; Kozarek, Ł.; Gołota, K.; Cichecki, H.; Kolimas, Ł.; Żelaziński, T.; Smolarczyk, A.; Babiński, A.; et al. Validated Analytical Model of 8/6 and 10/8 Switched Reluctance Motors. Energies 2022, 15, 630. [Google Scholar] [CrossRef]
- Lan, Y.; Benomar, Y.; Deepak, K.; Aksoz, A.; Baghdadi, M.; Bostanci, E.; Hegazy, O. Switched Reluctance Motors and Drive Systems for Electric Vehicle Powertrains: State of the Art Analysis and Future Trends. Energies 2021, 14, 2079. [Google Scholar] [CrossRef]
- Valencia, D.F.; Tarvirdilu-Asl, R.; Garcia, C.; Rodriguez, J.; Emadi, A. A Review of Predictive Control Techniques for Switched Reluctance Machine Drives. Part I: Fundamentals and Current Control. IEEE Trans. Energy Convers. 2020, 36, 1313–1322. [Google Scholar] [CrossRef]
- Valencia, D.F.; Tarvirdilu-Asl, R.; Garcia, C.; Rodriguez, J.; Emadi, A. A Review of Predictive Control Techniques for Switched Reluctance Machine Drives. Part II: Torque Control, Assessment and Challenges. IEEE Trans. Energy Convers. 2020, 36, 1323–1335. [Google Scholar] [CrossRef]
- Sun, X.; Diao, K.; Lei, G.; Guo, Y.; Zhu, J. Direct Torque Control Based on a Fast Modeling Method for a Segmented-Rotor Switched Reluctance Motor in HEV Application. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 9, 232–241. [Google Scholar] [CrossRef]
- Zhang, M.; Ali, N.; Gao, Q. Winding inductance and performance prediction of a switched reluctance motor with an exterior-rotor considering the magnetic saturation. CES Trans. Electr. Mach. Syst. 2021, 5, 212–223. [Google Scholar] [CrossRef]
- Evangeline, S.J.; Kumar, S.S.; Jayakumar, J. Torque modeling of Switched Reluctance Motor using LSSVM-DE. Neurocomputing 2016, 211, 117–128. [Google Scholar] [CrossRef]
- Li, Z.; Wei, X.; Wang, J.; Liu, L.; Du, S.; Guo, X.; Sun, H. Design of a Deflection Switched Reluctance Motor Control System Based on a Flexible Neural Network. Energies 2022, 15, 4172. [Google Scholar] [CrossRef]
- Sun, Q.; Wu, J.; Gan, C. Optimized Direct Instantaneous Torque Control for SRMs With Efficiency Improvement. IEEE Trans. Ind. Electron. 2020, 68, 2072–2082. [Google Scholar] [CrossRef]
- Wang, X.; Palka, R.; Wardach, M. Nonlinear Digital Simulation Models of Switched Reluctance Motor Drive. Energies 2020, 13, 6715. [Google Scholar] [CrossRef]
- Song, X.; Zhu, J.; Ren, P.; Lv, X. An Improved Fuzzy Control for Switched Reluctance Motor Based on Torque Sharing Function. In Proceedings of the 2021 6th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 15–17 July 2021; pp. 119–123. [Google Scholar] [CrossRef]
- Mahalakshmi, G.; Kanthalakshmi, S. Design of Iterative Learning Controller for Switched Reluctance Motor with Least Torque Ripple. In Proceedings of the 2022 8th International Conference on Advanced Computing and Communication Systems, Coimbatore, India, 25–26 March 2022; Volume 1, pp. 299–304. [Google Scholar] [CrossRef]
- Sun, X.; Feng, L.; Diao, K.; Yang, Z. An Improved Direct Instantaneous Torque Control Based on Adaptive Terminal Sliding Mode for a Segmented-Rotor SRM. IEEE Trans. Ind. Electron. 2020, 68, 10569–10579. [Google Scholar] [CrossRef]
- Dhale, S.; Nahid-Mobarakeh, B.; Emadi, A. A Review of Fixed Switching Frequency Current Control Techniques for Switched Reluctance Machines. IEEE Access 2021, 9, 39375–39391. [Google Scholar] [CrossRef]
- Nugroho, A.A.; Khosyi’in, M.; Arifin, B.; Suprapto, B.Y.; Haddin, M.; Nawawi, Z. Load Effect on Switched Reluctance Motor Using Hysteresis Current and Voltage Control. In Proceedings of the 2021 8th International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Semarang, Indonesia, 20–21 October 2021; pp. 59–63. [Google Scholar] [CrossRef]
- Bober, P.; Ferkova, Z. Online Optimization of Firing Angles for Switched Reluctance Motor Control. In Proceedings of the 2021 International Conference on Electrical Drives & Power Electronics (EDPE), Dubrovnik, Croatia, 22–24 September 2021; pp. 238–242. [Google Scholar] [CrossRef]
- Fang, G.; Scalcon, F.P.; Xiao, D.; Vieira, R.P.; Grundling, H.A.; Emadi, A. Advanced Control of Switched Reluctance Motors (SRMs): A Review on Current Regulation, Torque Control and Vibration Suppression. IEEE Open J. Ind. Electron. Soc. 2021, 2, 280–301. [Google Scholar] [CrossRef]
- Hadapad, B.S.; Naik, R.L. An Investigation on Torque Control Strategies for Switched Reluctance Motor. In Proceedings of the 2021 5th International Conference on Electrical, Electronics, Communication, Computer Technologies and Optimization Techniques (ICEECCOT), Mysuru, India, 10–11 December 2021; pp. 161–167. [Google Scholar] [CrossRef]
- Fang, G.; Bauman, J. Optimized Switching Angle-based Torque Control of Switched Reluctance Machines for Electric Vehicles. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; pp. 186–191. [Google Scholar] [CrossRef]
- Patel, M.A.; Patel, R.A.; Sharma, U.R. Advance Angle Control Based In-wheel Switched Reluctance Motor for EV Propulsion System. In Proceedings of the 2021 Asian Conference on Innovation in Technology (ASIANCON), Pune, India, 28–29 August 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Sah, G.K.; Jagwani, S.; Venkatesha, L. A new simplified control strategy for switched reluctance motor. In Proceedings of the 2017 Recent Developments in Control, Automation & Power Engineering (RDCAPE), Noida, India, 26–26 October 2017; pp. 241–244. [Google Scholar] [CrossRef]
- Ahmad, S.S.; Narayanan, G. Linearised modelling of switched reluctance motor for closed loop current control. In Proceedings of the 2014 IEEE 6th India International Conference on Power Electronics (IICPE), Kurukshetra, India, 8–10 December 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Verma, A.; Ahmad, S.S.; Narayanan, G. Optimal Switching Angles for Single-Pulse-Operated Switched Reluctance Generator. In Proceedings of the 2021 National Power Electronics Conference (NPEC), Bhubaneswar, India, 15–17 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Sologubov, A.Y.; Kirpichnikova, I.M. Switched-Reluctance Drive with Sigmoids-Based Pulse-Phase Control. In Proceedings of the 2021 International Conference on Electrotechnical Complexes and Systems (ICOECS), Ufa, Russia, 26–29 October 2021; pp. 209–213. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. Model Free Adaptive Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Liu, S.; Hou, Z.; Tian, T.; Deng, Z.; Guo, L. Path tracking control of a self-driving wheel excavator via an enhanced data-driven model-free adaptive control approach. IET Control Theory Appl. 2020, 14, 220–232. [Google Scholar] [CrossRef]
- Liao, Y.; Jiang, Q.; Du, T.; Jiang, W. Redefined Output Model-Free Adaptive Control Method and Unmanned Surface Vehicle Heading Control. IEEE J. Ocean. Eng. A J. Devoted Appl. Electr. Electron. Eng. Ocean. Environ. 2019, 45, 714–723. [Google Scholar] [CrossRef]
- Lei, T.; Hou, Z.; Ren, Y. Data-Driven Model Free Adaptive Perimeter Control for Multi-Region Urban Traffic Networks With Route Choice. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2894–2905. [Google Scholar] [CrossRef]
- Zhao, Y.; Yuan, Z.; Lu, C.; Zhang, G.; Li, X.; Chen, Y. Improved model-free adaptive wide-area coordination damping controller for multiple-input–multiple-output power systems. IET Gener. Transm. Distrib. 2016, 10, 3264–3275. [Google Scholar] [CrossRef]
- Hashjin, S.A.; Pang, S.; Miliani, E.-H.; Ait-Abderrahim, K.; Nahid-Mobarakeh, B. Data-Driven Model-Free Adaptive Current Control of a Wound Rotor Synchronous Machine Drive System. IEEE Trans. Transp. Electrif. 2020, 6, 1146–1156. [Google Scholar] [CrossRef]
- Masood, R.J.; Wang, D.B.; Ali, Z.A.; Khan, B. DDC Control Techniques for Three-Phase BLDC Motor Position Control. Algorithms 2017, 10, 110. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. A Novel Data-Driven Control Approach for a Class of Discrete-Time Nonlinear Systems. IEEE Trans. Control. Syst. Technol. 2011, 19, 1549–1558. [Google Scholar] [CrossRef]
- Hou, Z.; Chi, R.; Gao, H. An Overview of Dynamic-Linearization-Based Data-Driven Control and Applications. IEEE Trans. Ind. Electron. 2017, 64, 4076–4090. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Chen, L.; Wang, Z.; Hou, E. Speed Control of Switched Reluctance Motor Based on Regulation Region of Switching Angle. Energies 2022, 15, 5782. https://doi.org/10.3390/en15165782
Zhang Y, Chen L, Wang Z, Hou E. Speed Control of Switched Reluctance Motor Based on Regulation Region of Switching Angle. Energies. 2022; 15(16):5782. https://doi.org/10.3390/en15165782
Chicago/Turabian StyleZhang, Yun, Liang Chen, Zhixue Wang, and Enguang Hou. 2022. "Speed Control of Switched Reluctance Motor Based on Regulation Region of Switching Angle" Energies 15, no. 16: 5782. https://doi.org/10.3390/en15165782
APA StyleZhang, Y., Chen, L., Wang, Z., & Hou, E. (2022). Speed Control of Switched Reluctance Motor Based on Regulation Region of Switching Angle. Energies, 15(16), 5782. https://doi.org/10.3390/en15165782