
An Early Fault Diagnosis Method for Ball Bearings of Electric Vehicles Based on Integrated Subband Averaging and Enhanced Kurtogram Method

 , ,
, ,
Abstract
:1. Introduction
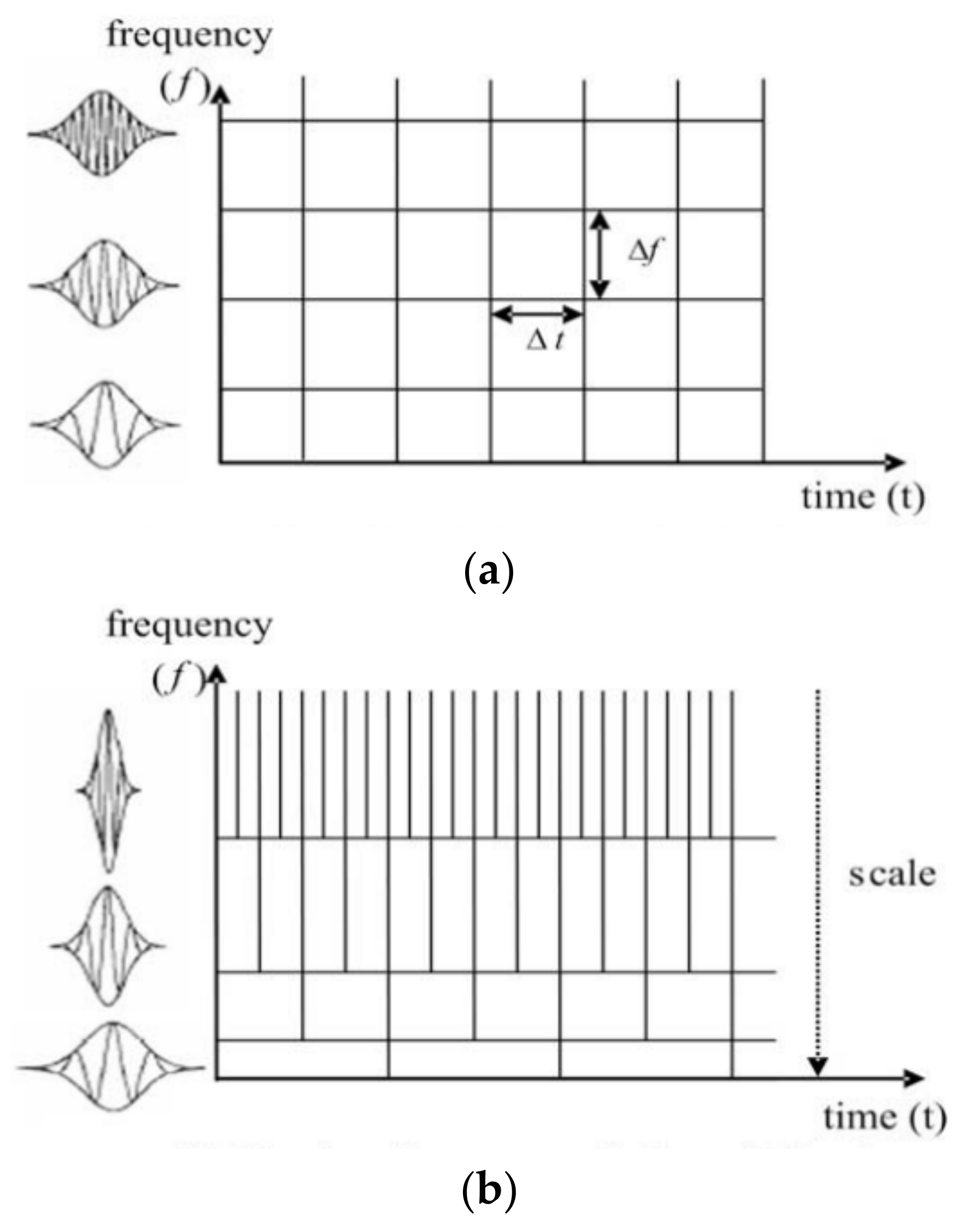
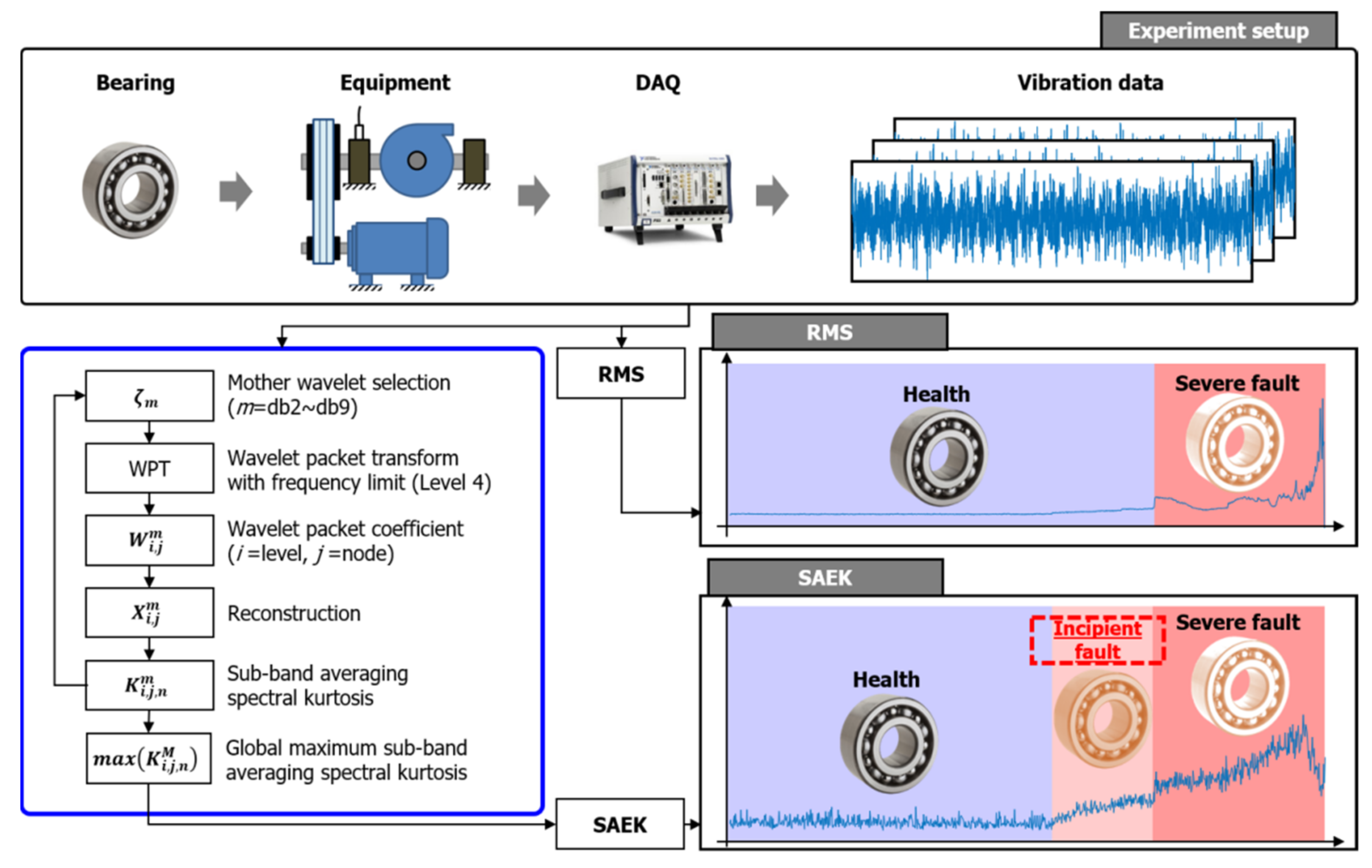
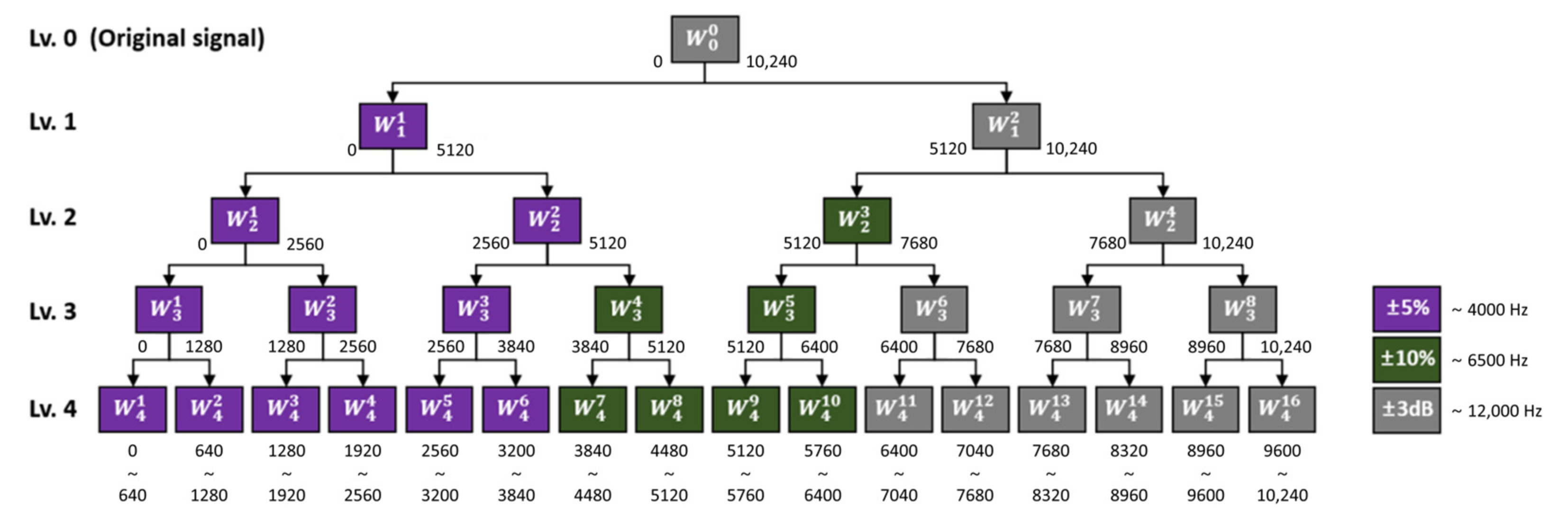
2. Theoretical Background
3. Experimental Verification
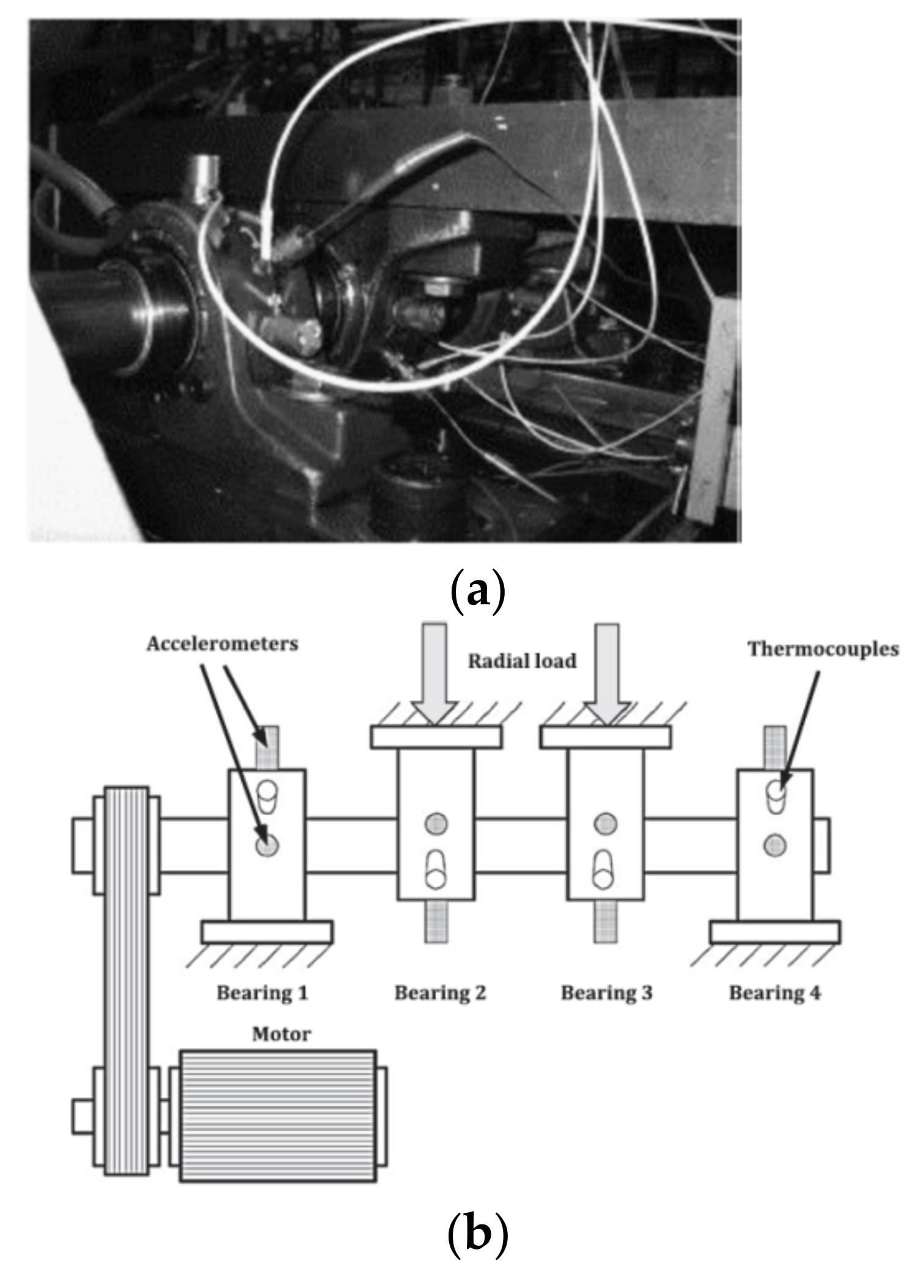
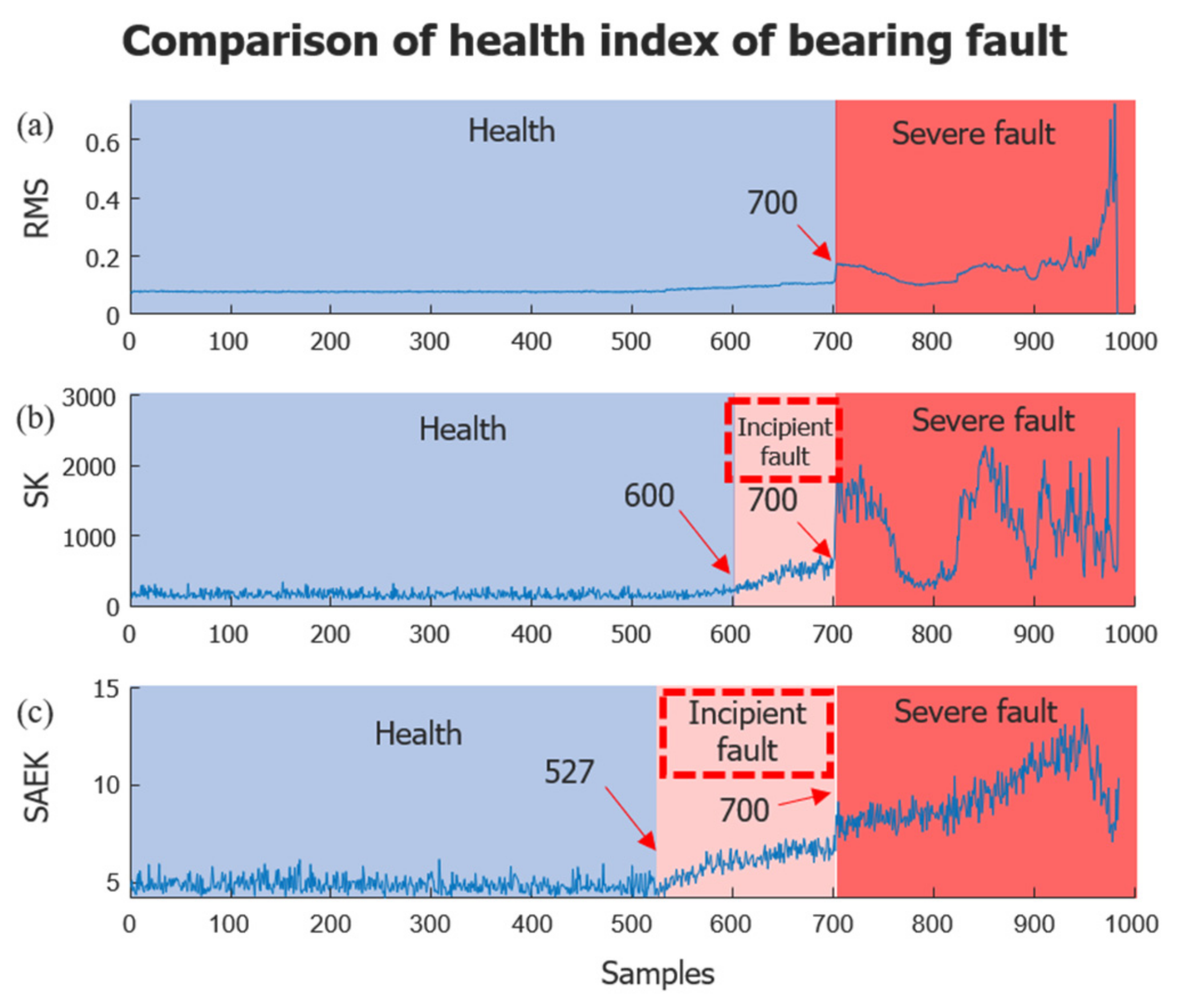
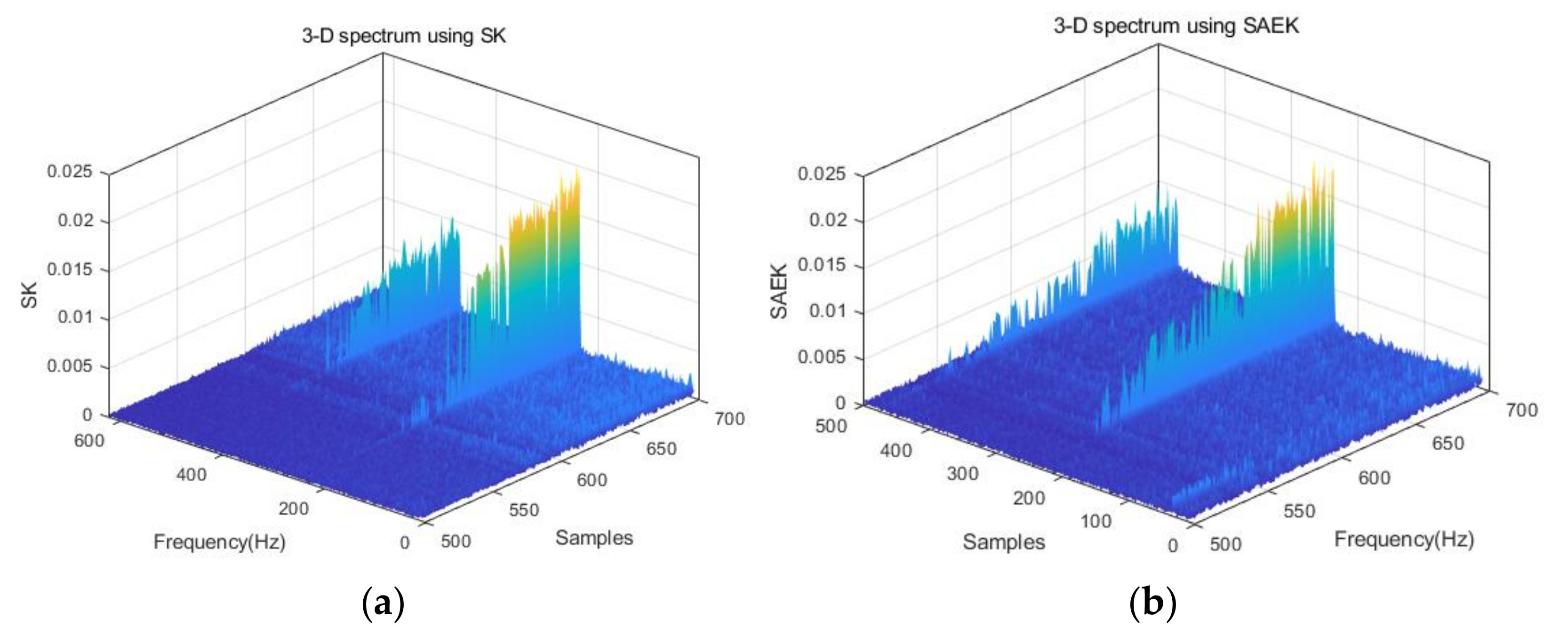
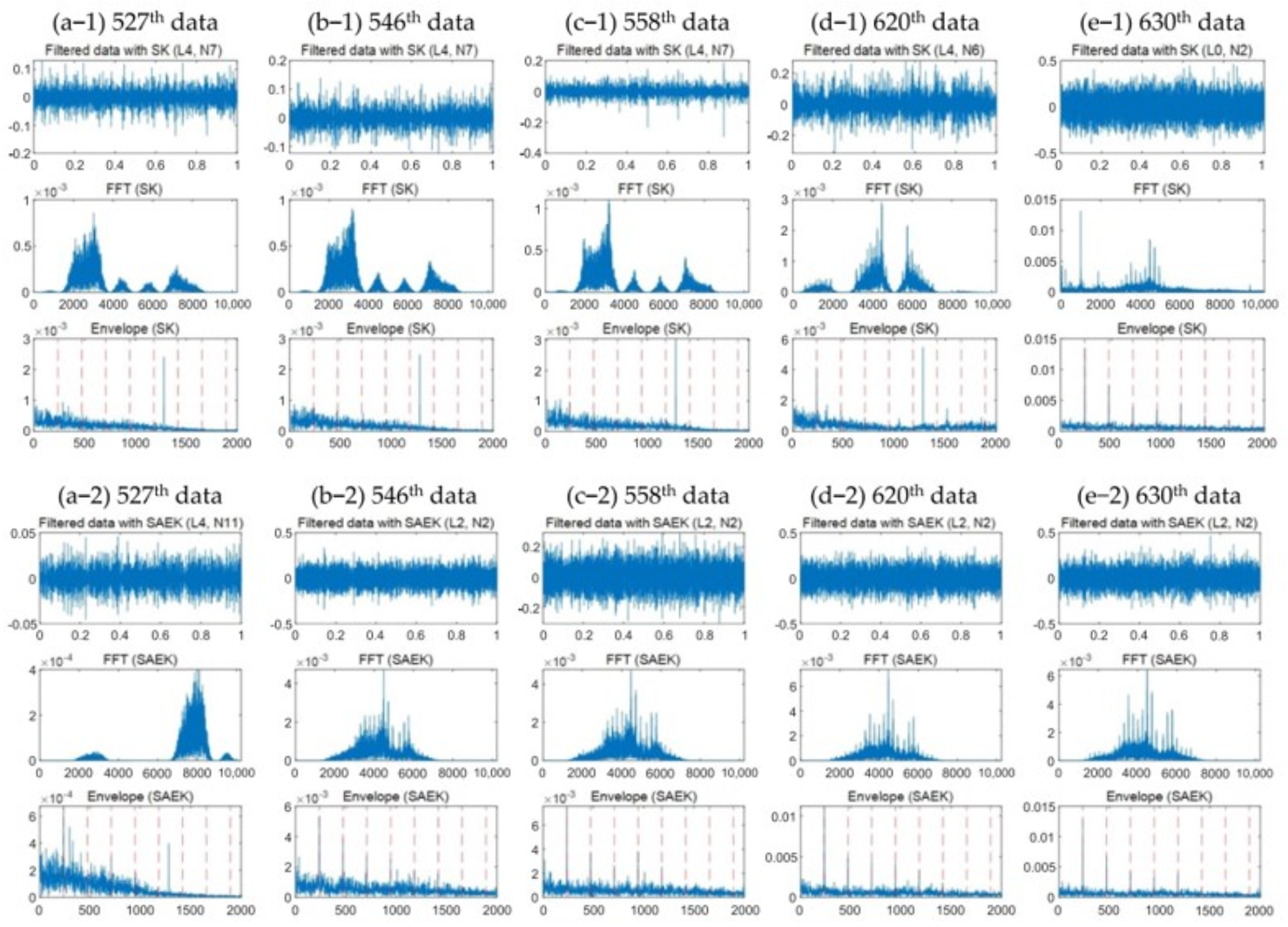
3.1. Case I–Accelerated Lifetime Test Data
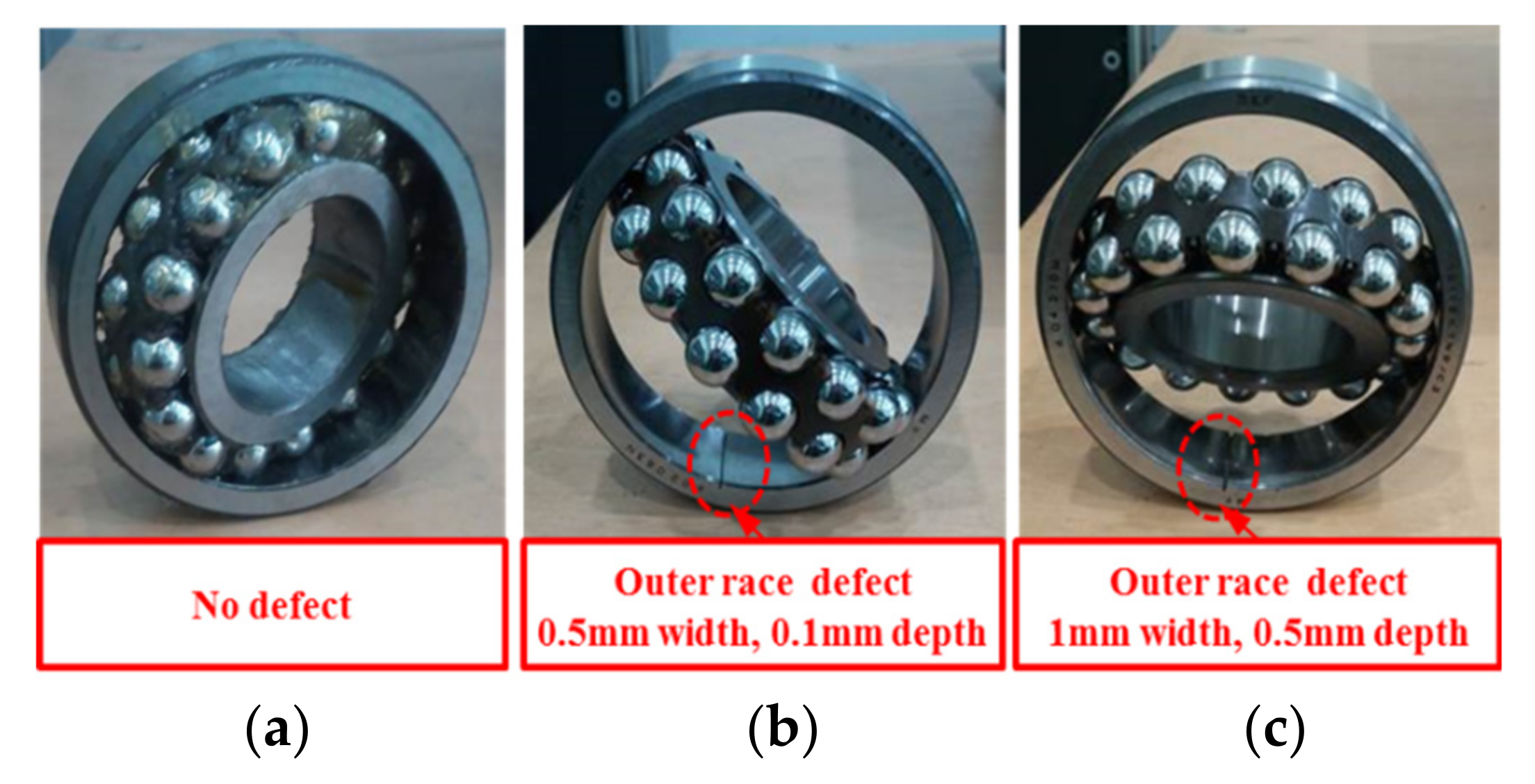
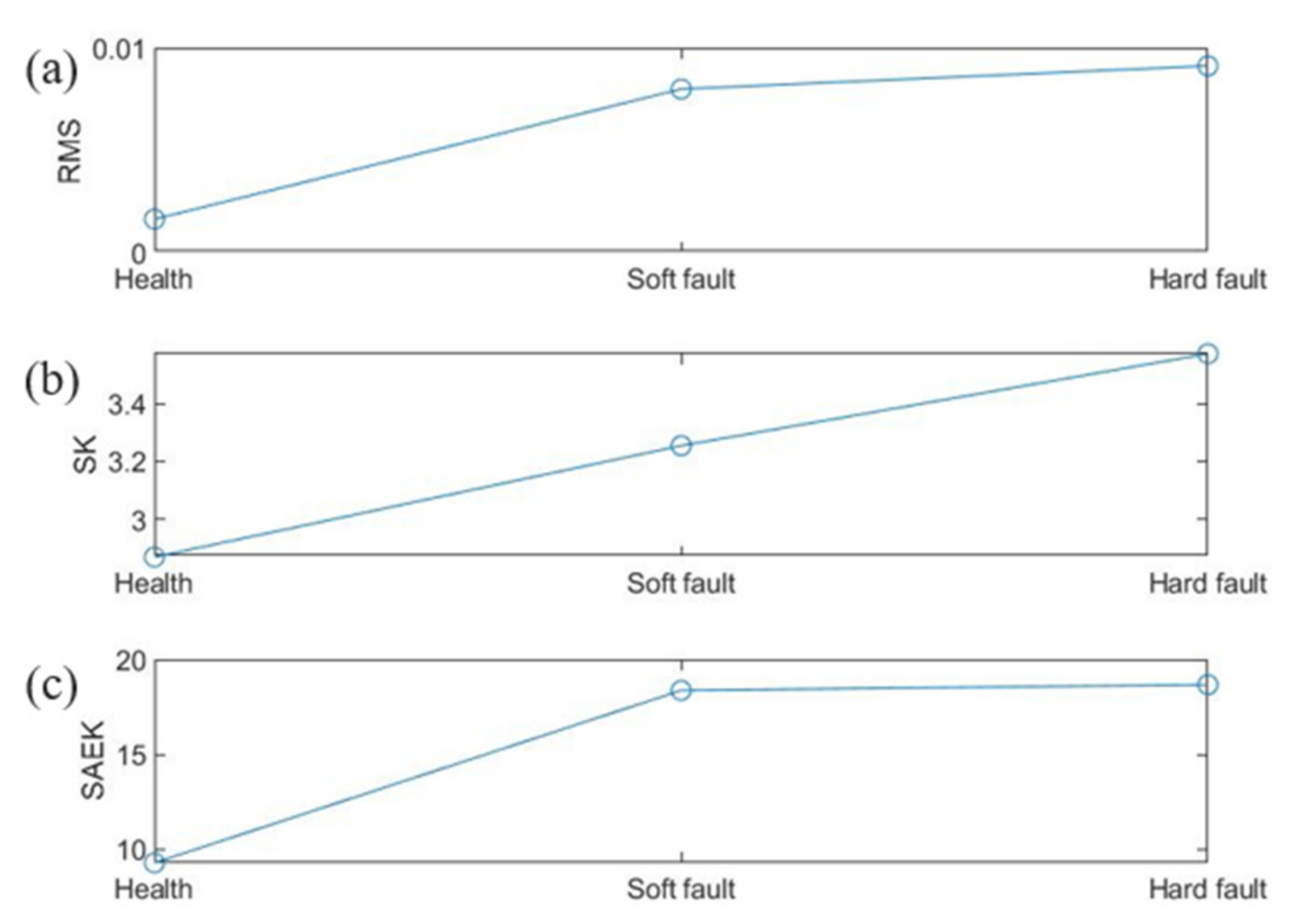
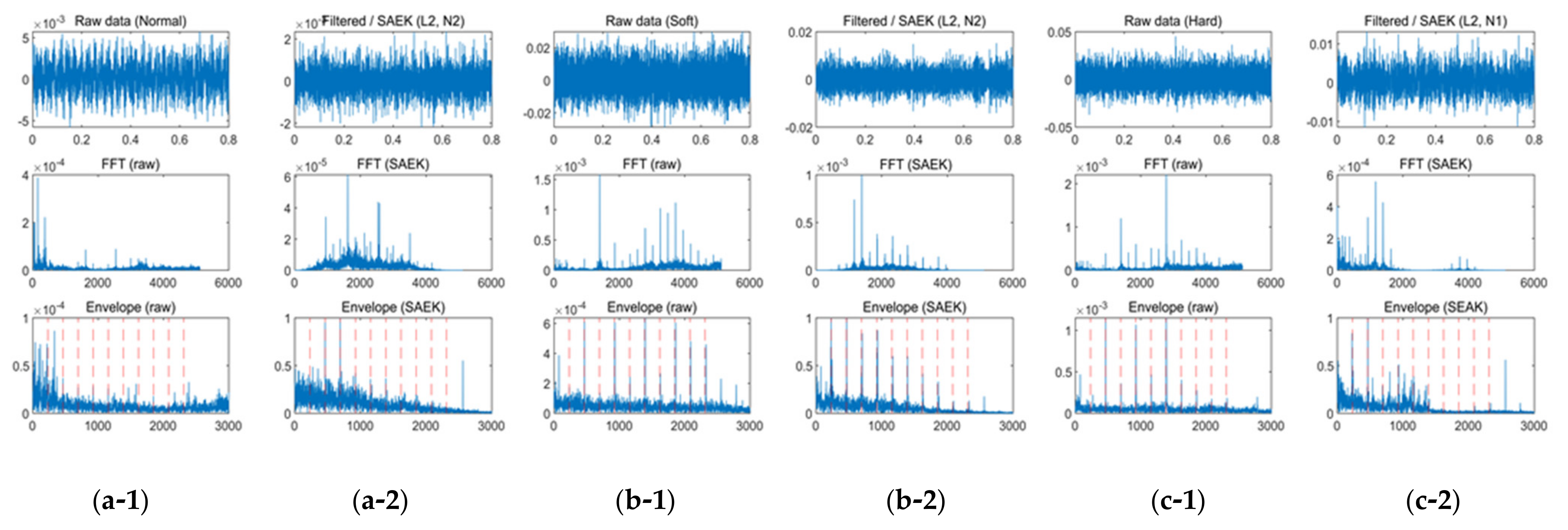
3.2. Case II–Fault Level Test Data
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- United Nations (UN). United Nations Framework Convention on Climate Change Annual Report 2021. 2021. Available online: https://unfccc.int/sites/default/files/resource/UNFCCC_Annual_Report_2021.pdf (accessed on 31 May 2022).
- International Energy Agency. Global EV Outlook 2021; IEA: Paris, France, 2021; Available online: https://www.iea.org/reports/global-ev-outlook-2021/introduction (accessed on 30 April 2021).
- International Energy Agency. Global EV Outlook 2022; IEA: Paris, France, 2022; Available online: https://www.iea.org/reports/global-ev-outlook-2022 (accessed on 31 May 2022).
- He, F.; Xie, G.; Luo, J. Electrical bearing failures in electric vehicles. Friction 2020, 8, 4–28. [Google Scholar] [CrossRef] [Green Version]
- Shah, R.; Tung, S.; Chen, R.; Miller, R. Grease performance requirements and future perspectives for electric and hybrid vehicle applications. Lubricants 2021, 9, 40. [Google Scholar] [CrossRef]
- Wang, X.; Lu, S.; Chen, K.; Wang, Q.; Zhang, S. Bearing Fault Diagnosis of Switched Reluctance Motor in Electric Vehicle Powertrain via Multisensor Data Fusion. IEEE Trans. Ind. Inform. 2021, 18, 2452–2464. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Upadhyay, R.K.; Kumaraswamidhas, L.A.; Azam, M.S. Rolling element bearing failure analysis: A case study. Case Stud. Eng. Fail. Anal. 2013, 1, 15–17. [Google Scholar] [CrossRef] [Green Version]
- Kong, K.; Cai, B.; Liu, Y.; Zhu, H.; Liu, Y.; Shao, H.; Yang, C.; Li, H.; Mo, T. Optimal sensor placement methodology of hydraulic control system for fault diagnosis. Mech. Syst. Signal Process. 2022, 174, 109069. [Google Scholar] [CrossRef]
- Cai, B.; Wang, Z.; Zhu, H.; Liu, Y.; Hao, K.; Yang, Z.; Ren, Y.; Feng, Q.; Liu, Z. Artificial Intelligence Enhanced Two-Stage Hybrid Fault Prognosis Methodology of PMSM. IEEE Trans. Ind. Inform. 2021, 18, 7262–7273. [Google Scholar] [CrossRef]
- Cai, B.; Hao, K.; Wang, Z.; Yang, C.; Kong, X.; Liu, Z.; Ji, R.; Liu, Y. Data-driven early fault diagnostic methodology of permanent magnet synchronous motor. Expert Syst. Appl. 2021, 177, 115000. [Google Scholar] [CrossRef]
- Gómez-Peñate, S.; López-Estrada, F.R.; Valencia-Palomo, G.; Osornio-Ríos, R.; Zepeda-Hernández, J.A.; Rios-Rojas, C.; Camas-Anzueto, J. Camas-Anzueto. Sensor Fault Diagnosis Observer for an Electric Vehicle Modeled as a Takagi-Sugeno System. J. Sens. 2018, 2018, 9. [Google Scholar] [CrossRef] [Green Version]
- Antoni, J.; Randall, R.B. The spectral kurtosis: Application to the vibratory surveillance and diagnostics of rotating machines. Mech. Syst. Signal Proces. 2006, 20, 308–331. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B.; Endo, H. The enhancement of fault detection and diagnosis in rolling element bearings using minimum entropy deconvolution combined with spectral kurtosis. Mech. Syst. Signal Process. 2007, 21, 2616–2633. [Google Scholar] [CrossRef]
- Smith, W.A.; Fan, Z.; Peng, Z.; Li, H.; Randall, R.B. Optimised Spectral Kurtosis for bearing diagnostics under electromagnetic interference. Mech. Syst. Signal Process. 2016, 75, 371–394. [Google Scholar] [CrossRef] [Green Version]
- Zhong, J.; Wang, D.; Guo, J.E.; Cabrera, D.; Li, C. Theoretical investigations on kurtosis and entropy and their improvements for system health monitoring. IEEE Trans. Instrum. Meas. 2020, 70, 3503710. [Google Scholar] [CrossRef]
- Barszcz, T.; Randall, R.B. Application of spectral kurtosis for detection of a tooth crack in the planetary gear of a wind turbine. Mech. Syst. Signal Process. 2009, 23, 1352–1365. [Google Scholar] [CrossRef]
- Wang, L.; Cai, G.; Wang, J.; Jiang, X.; Zhu, Z. Dual-enhanced sparse decomposition for wind turbine gearbox fault diagnosis. IEEE Trans. Instrum. Meas. 2018, 68, 450–461. [Google Scholar] [CrossRef]
- Hong, Y.; Kim, M.; Lee, H.; Park, J.J.; Lee, D. Early Fault Diagnosis and Classification of Ball Bearing Using Enhanced Kurtogram and Gaussian Mixture Model. IEEE Trans. Instrum. Meas. 2019, 68, 4746–4755. [Google Scholar] [CrossRef]
- Wang, Y.; Xiang, J.; Markert, R.; Liang, M. Spectral kurtosis for fault detection, diagnosis and prognostics of rotating machines: A review with applications. Mech. Syst. Signal Process. 2016, 66, 679–698. [Google Scholar] [CrossRef]
- Luo, C.; Mo, Z.; Miao, Q. Cyclic harmonic ratio defined in squared envelope spectrum and log-envelope spectrum for gearbox fault diagnosis. IEEE Trans. Instrum. Meas. 2020, 69, 9568–9577. [Google Scholar] [CrossRef]
- Li, N.; Huang, W.; Guo, W.; Gao, G.; Zhu, Z. Multiple enhanced sparse decomposition for gearbox compound fault diagnosis. IEEE Trans. Instrum. Meas. 2019, 69, 770–781. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, J.; Wang, J.; Du, W.; Wang, J.; Han, X.; He, G.; Du, W. A novel fault diagnosis method of gearbox based on maximum kurtosis spectral entropy deconvolution. IEEE Access. 2019, 7, 29520–29532. [Google Scholar] [CrossRef]
- Dalvand, F.; Kang, M.; Dalvand, S.; Pecht, M. Detection of generalized-roughness and single-point bearing faults using linear prediction-based current noise cancellation. IEEE Trans. Ind. Electron. 2018, 65, 9728–9738. [Google Scholar] [CrossRef]
- Leite, V.C.M.N.; Borges Da Silva, J.G.; Veloso, G.F.C.; Borges Da Silva, L.E.; Lambert-Torres, G.; Bonaldi, E.L.; De Lacerda De Oliveira, L.E. Detection of Localized Bearing Faults in Induction Machines by Spectral Kurtosis and Envelope Analysis of Stator Current. IEEE Trans. Ind. Electron. 2015, 62, 1855–1865. [Google Scholar] [CrossRef]
- Mohamed, Z.; Chemseddine, R.; Djamel, B.; Azeddine, R. Automatic condition monitoring of electromechanical system based on MCSA, spectral kurtosis and SOM neural network. J. Vibroengineering 2019, 21, 2082–2095. [Google Scholar]
- Liu, Z.; Yang, S.; Liu, Y.; Lin, J.; Gu, X. Adaptive correlated Kurtogram and its applications in wheelset-bearing system fault diagnosis. Mech. Syst. Signal Process. 2021, 154, 107511. [Google Scholar] [CrossRef]
- Hu, Y.; Bao, W.; Tu, X.; Li, F.; Li, K. An Adaptive Spectral Kurtosis Method and its Application to Fault Detection of Rolling Element Bearings. IEEE Trans. Instrum. Meas. 2020, 69, 739–750. [Google Scholar] [CrossRef]
- Liang, K.; Zhao, M.; Lin, J.; Jiao, J.; Ding, C. Maximum average kurtosis deconvolution and its application for the impulsive fault feature enhancement of rotating machinery. Mech. Syst. Signal Process. 2021, 149, 107323. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Z.; Cao, H.; Zhang, X. Subband averaging kurtogram with dual-tree complex wavelet packet transform for rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2020, 142, 106755. [Google Scholar] [CrossRef]
- Moca, V.V.; Bârzan, H.; Nagy-Dăbâcan, A.; Mureșan, R.C. Time-frequency super-resolution with superlets. Nat. Commun. 2021, 12, 337. [Google Scholar] [CrossRef]
- Mallat, S. A Wavelet Tour of Signal Processing; Elsevier: Amsterdam, The Netherlands, 1999. [Google Scholar]
- Yan, R.; Gao, R.X.; Chen, X. Wavelets for fault diagnosis of rotary machines: A review with applications. Signal Process. 2014, 96, 1–15. [Google Scholar] [CrossRef]
- He, H.; Shen, X.; Starzyk, J.A. Power quality disturbances analysis based on EDMRA method. Int. J. Electr. Power Energy Syst. 2009, 31, 258–268. [Google Scholar] [CrossRef]
- Poisson, O.; Rioual, P.; Meunier, M. New signal processing tools applied to power quality analysis. IEEE Trans. Power Deliv. 1999, 14, 561–566. [Google Scholar] [CrossRef]
- Plaza, E.G.; Núñez López, P.J. Application of the wavelet packet transform to vibration signals for surface roughness monitoring in CNC turning operations. Mech. Syst. Signal Process. 2018, 98, 902–919. [Google Scholar] [CrossRef]
- Plaza, E.G.; López, P.N. Analysis of cutting force signals by wavelet packet transform for surface roughness monitoring in CNC turning. Mech. Syst. Signal Process. 2018, 98, 634–651. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Characteristic Frequency | Value |
|---|---|
| Shaft frequency | 33.3 Hz |
| Ball pass frequency outer race (BPFO) | 236 Hz |
| Ball pass frequency inner race (BPFI) | 297 Hz |
| Ball spin frequency (BSF) | 278 Hz (2 × 139 Hz) |
| Fundamental train frequency (FTF) | 15 Hz |
| Bearing Specifications | Values |
|---|---|
| Pitch diameter | 101.4 mm |
| Rolling element diameter | 15 mm |
| Number of rolling elements per row | 15 |
| Contact angle | 0° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, W.; Lee, M.; Park, S.-J.; Jang, S.-H.; Kang, B.-S.; Kim, N.; Hong, Y.-S. An Early Fault Diagnosis Method for Ball Bearings of Electric Vehicles Based on Integrated Subband Averaging and Enhanced Kurtogram Method. Energies 2022, 15, 5510. https://doi.org/10.3390/en15155510
Kim W, Lee M, Park S-J, Jang S-H, Kang B-S, Kim N, Hong Y-S. An Early Fault Diagnosis Method for Ball Bearings of Electric Vehicles Based on Integrated Subband Averaging and Enhanced Kurtogram Method. Energies. 2022; 15(15):5510. https://doi.org/10.3390/en15155510
Chicago/Turabian StyleKim, Woojoong, Munsu Lee, Sang-Jun Park, Sung-Hyun Jang, Byeong-Su Kang, Namjin Kim, and Young-Sun Hong. 2022. "An Early Fault Diagnosis Method for Ball Bearings of Electric Vehicles Based on Integrated Subband Averaging and Enhanced Kurtogram Method" Energies 15, no. 15: 5510. https://doi.org/10.3390/en15155510
APA StyleKim, W., Lee, M., Park, S.-J., Jang, S.-H., Kang, B.-S., Kim, N., & Hong, Y.-S. (2022). An Early Fault Diagnosis Method for Ball Bearings of Electric Vehicles Based on Integrated Subband Averaging and Enhanced Kurtogram Method. Energies, 15(15), 5510. https://doi.org/10.3390/en15155510