
Model Predictive Control of a Modular 7-Level Converter Based on SiC-MOSFET Devices—An Experimental Assessment †





Abstract
:1. Introduction
2. Proposed 7-Level MMC Topology
3. MMC Predictive Model
3.1. Current Reference Generation
3.2. Cost Function and Optimization Process
| Algorithm 1 Pseudocode of the optimization process applied to the FSF-MPC current controller |
1. Initialize 2. Compute the current references (7). 3. while do 4. 5. Calculate the prediction currents (3). 6. Compute the cost function, (8). 7. if then 8. 9. end if 10. if then 11. 12. end if 13. if then 14. 15. end if 16. 17. end while 18. Compute the modulation signals (9). 19. Get the turn-on times of the firing signals according to Figure 3. 20. Apply the firing signals. |
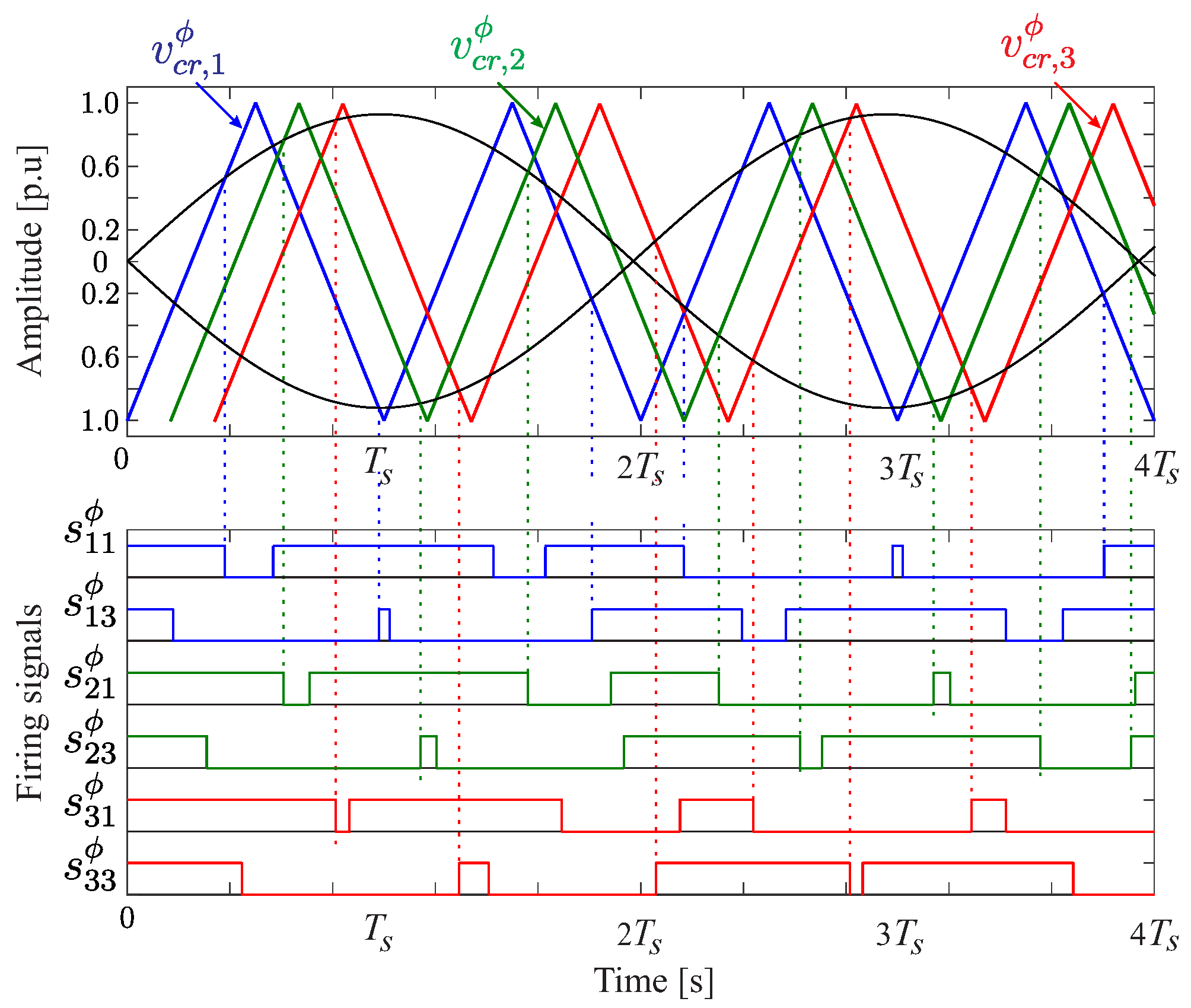
3.3. Proposed PSM-PWM Strategy
3.4. Theoretical Results
4. Experimental Assessment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AC | Alternating current |
| CHB | Cascade H-Bridge |
| FSF | Fixed switching frequency |
| IGBT | Isolated Gate Bipolar Transistors |
| MMC | Modular multilevel converter |
| MOSFET | Metal-Oxide-Semiconductor Field-Effect Transistor |
| MPC | Model-based predictive control |
| PCC | Point of common coupling |
| PSM-PWM | Phase shift multicarrier PWM |
| PWM | Pulse-width modulation |
| SiC | Silicon Carbide |
| THD | Total harmonic distortion |
| VSCs | Voltage source converters |
Nomenclature
| dc-link capacitor | |
| , , | FSF-MPC cost functions |
| , , | Load phase currents |
| , , | Converter phase currents |
| , , | Converter phase current predictions |
| , | MMC currents in the subspace |
| , , | Converter phase current references |
| , , | Converter phase voltages |
| Number of cells | |
| Instantaneous active power reference | |
| Instantaneous reactive power reference | |
| Instantaneous reactive load power | |
| Clarke’s transformation matrix | |
| x | Corresponding cell number |
| y | Switching device in each cell |
| Sampling time | |
| dc-link voltage | |
| Filter resistance | |
| Filter inductance | |
| Optimum vector | |
| Optimal voltage | |
| Carrier wave | |
| Modulation signals |
References
- Murillo-Yarce, D.; Rivera, M.; Restrepo, C.; Rodríguez, R.; Wheeler, P.W.; Zanchetta, P.; Mirzaeva, G. Sequential Predictive Current Control of a VSI with Common-Mode Voltage Reduction. In Proceedings of the 10th International Conference on Power Electronics, Machines and Drives (PEMD), Virtual/Online, 15–17 December 2020. [Google Scholar]
- Milev, K.; Yaramasu, V.; Dekka, A.; Kouro, S. Predictive control of multichannel boost converter and VSI-based six-phase PMSG wind energy systems with fixed switching frequency. In Proceedings of the 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tehran, Iran, 4–6 February 2020; pp. 1–6. [Google Scholar]
- Abdelaziz, F.; Azzouz, Z.e.; Omari, A. Common mode voltage mitigation using a new modified model predictive control (mmpc) in a three phase voltage source inverter. In Proceedings of the 6th IEEE International Energy Conference (ENERGYCon), Tunis, Tunisia, 28 September–1 October 2020; pp. 93–97. [Google Scholar]
- Gil-González, W.; Escobar-Mejía, A.; Montoya-Giraldo, O. Model Predictive Direct Power Control Applied to Grid-Connected Voltage Source Inverters. In Proceedings of the 11th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Kiel, Germany, 26–29 June 2020; pp. 610–614. [Google Scholar]
- Xu, J.; Soeiro, T.B.; Gao, F.; Chen, L.; Tang, H.; Bauer, P.; Dragičević, T. Carrier-based modulated model predictive control strategy for three-phase two-level VSIs. Trans. Energy Convers. 2021, 36, 1673–1687. [Google Scholar] [CrossRef]
- Rojas, D.; Rivera, M.; Toledo, S.; Wheeler, P. Predictive control techniques applied to a 2L-VSI. In Proceedings of the IEEE CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Virtual, 6–9 December 2021; pp. 1–6. [Google Scholar]
- Rojas, D.; Rivera, M.; Muñoz, J.; Wheeler, P. Cascaded predictive control for a three-phase VSI with different cost functions. In Proceedings of the IEEE CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Virtual, 6–9 December 2021; pp. 1–6. [Google Scholar]
- Xu, J.; Gao, F.; Soeiro, T.B.; Chen, L.; Tarisciotti, L.; Tang, H.; Bauer, P. Model Predictive Control for the Reduction of DC-link Current Ripple in Two-level Three-phase Voltage Source Inverters. In Proceedings of the 22nd European Conference on Power Electronics and Applications (EPE’20 ECCE Europe), Virtual, 7–11 September 2020; p. P-1. [Google Scholar]
- Dabkara, M.; Gupta, Y.; Sharma, N.; Sharma, A. A Solar PV Standalone System with Predictive Current Controlled Voltage Source Inverter. In Proceedings of the 3rd International Conference on Emerging Technologies in Computer Engineering: Machine Learning and Internet of Things (ICETCE), Jaipur, India, 7–8 February 2020; pp. 1–6. [Google Scholar]
- Comparatore, L.; Renault, A.; Pacher, J.; Rodas, J.; Gregor, R. Finite Control Set Model Predictive Control Strategies for a Three-Phase Seven-level Cascade H-Bridge DSTATCOM. In Proceedings of the 7th International Conference on Renewable Energy Research and Applications (ICRERA), Istanbul, Turkey, 18–21 September 2018; pp. 779–784. [Google Scholar]
- Xu, Z.; Liu, Y.; Cao, B.; Liu, B.; Li, S. Research and Application of Compensation Characteristics of DSTATCOM under Unbalanced Load. In Proceedings of the 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 806–810. [Google Scholar]
- Renault, A.; Rodas, J.; Comparatore, L.; Pacher, J.; Gregor, R. Modulated Predictive Current Control Technique for a Three-Phase Four-Wire Active Power Filter based on H-bridge Two-Level Converter. In Proceedings of the 53rd International Universities Power Engineering Conference (UPEC), Glasgow, UK, 4–7 September 2018; pp. 1–6. [Google Scholar]
- Kehl, Z.; Glasberger, T.; Peroutka, Z. Finite Control Set Model Predictive Control of Static Compensator. In Proceedings of the 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 858–863. [Google Scholar]
- Renault, A.; Ayala, M.; Comparatore, L.; Pacher, J.; Gregor, R. Comparative Study of Predictive-Fixed Switching Techniques for a Cascaded H-Bridge Two level STATCOM. In Proceedings of the 53rd International Universities Power Engineering Conference (UPEC), Glasgow, UK, 4–7 September 2018; pp. 1–6. [Google Scholar]
- Pacher, J.; Rodas, J.; Gregor, R.; Rivera, M.; Renault, A.; Comparatore, L. Efficiency analysis of a modular H-bridge based on SiC MOSFET. Taylor Francis Trans. 2019, 7, 59–67. [Google Scholar] [CrossRef]
- Ipoum-Ngome, P.G.; Mon-Nzongo, D.L.; Flesch, R.C.C.; Song-Manguelle, J.; Wang, M.; Jin, T. Model-free predictive current control for multilevel voltage source inverters. Trans. Ind. Electron. 2020, 68, 9984–9997. [Google Scholar] [CrossRef]
- Vu, H.C.; Lee, H.H. Model-Predictive Current Control Scheme for Seven-Phase Voltage-Source Inverter With Reduced Common-Mode Voltage and Current Harmonics. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 3610–3621. [Google Scholar] [CrossRef]
- Rodriguez, J.; Garcia, C.; Mora, A.; Flores-Bahamonde, F.; Acuna, P.; Novak, M.; Zhang, Y.; Tarisciotti, L.; Davari, S.A.; Zhang, Z.; et al. Latest Advances of Model Predictive Control in Electrical Drives—Part I: Basic Concepts and Advanced Strategies. IEEE Trans. Power Electron. 2022, 37, 3927–3942. [Google Scholar] [CrossRef]
- Rodriguez, J.; Garcia, C.; Mora, A.; Davari, S.A.; Rodas, J.; Valencia, D.F.; Elmorshedy, M.; Wang, F.; Zuo, K.; Tarisciotti, L.; et al. Latest Advances of Model Predictive Control in Electrical Drives—Part II: Applications and Benchmarking With Classical Control Methods. IEEE Trans. Power Electron. 2022, 37, 5047–5061. [Google Scholar] [CrossRef]
- Milev, K.; Yaramasu, V.; Dekka, A.; Kouro, S.; Dragicevic, T.; Rodriguez, J. Modulated Model Predictive Torque and Power Control of Gearless PMSG Wind Turbines. In Proceedings of the 11th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Dubrovnik, Croatia, 28 September–1 October 2020; pp. 352–357. [Google Scholar] [CrossRef]
- Gregor, R.; Renault, A.; Comparatore, L.; Pacher, J.; Rodas, J.; Gregor, D. Finite-states model predictive control with increased prediction horizon for a 7-level cascade h-bridge multilevel STATCOM. In Proceedings of the World Multi-Conference on Systemics, Cybernetics and Informatics, Orlando, FL, USA, 5–8 July 2016; pp. 1–6. [Google Scholar]
- Comparatore, L.; Renault, A.; Pacher, J.; Gregor, R.; Rodas, J.; Rivera, M. Model based predictive control with switcher of redundant vectors for a cascade h-bridge multilevel statcom. In Proceedings of the IEEE ANDESCON, Arequipa, Peru, 19–21 October 2016; pp. 1–4. [Google Scholar]
- Guo, L.; Jin, N.; Gan, C.; Luo, K. Hybrid voltage vector preselection-based model predictive control for two-level voltage source inverters to reduce the common-mode voltage. IEEE Trans. Ind. Electron. 2019, 67, 4680–4691. [Google Scholar] [CrossRef]
- Renault, A.; Pacher, J.; Comparatore, L.; Ayala, M.; Rodas, J.; Gregor, R. MPC with Space Vector Phase-Shift PWM (SV-PSPWM) Technique with Harmonic Mitigation Strategy for Shunt Active Power Filters Based on H-Bridge Multilevel Converter. Front. Energy Res. 2022, 10, 779108. [Google Scholar] [CrossRef]
- Gregor, R.; Pacher, J.; Espinoza, A.; Renault, A.; Comparatore, L.; Ayala, M. Harmonics Compensation by Using a Multi-Modular H-Bridge-Based Multilevel Converter. Energies 2021, 14, 4698. [Google Scholar] [CrossRef]
- Renault, A.; Ayala, M.; Pacher, J.; Comparatore, L.; Gregor, R.; Toledo, S. Current control based on space vector modulation applied to three-phase H-Bridge STATCOM. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Buenos Aires, Argentina, 26–28 February 2020; pp. 1066–1070. [Google Scholar]
- Gregor, R.; Pacher, J.; Renault, A.; Comparatore, L.; RODAS, J. Experimental Validation of the DSTATCOM Based on SiC-MOSFET Multilevel Converter for Reactive Power Compensation. J. Syst. Cybern. Inform. 2020, 18, 57–61. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cell | Cell | Cell | |||||
|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 0 | 0 | 1 | 2 | −1 |
| 0 | 0 | 0 | 0 | 1 | 0 | 3 | 1 |
| . | . | . | . | . | . | . | . |
| 0 | 1 | 0 | 1 | 0 | 0 | 21 | −2 |
| 0 | 1 | 0 | 1 | 0 | 1 | 22 | −3 |
| . | . | . | . | . | . | . | . |
| 1 | 0 | 1 | 0 | 1 | 0 | 43 | 3 |
| . | . | . | . | . | . | . | . |
| 1 | 0 | 1 | 0 | 1 | 1 | 44 | 2 |
| . | . | . | . | . | . | . | . |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gregor, R.; Pacher, J.; Renault, A.; Comparatore, L.; Rodas, J. Model Predictive Control of a Modular 7-Level Converter Based on SiC-MOSFET Devices—An Experimental Assessment. Energies 2022, 15, 5242. https://doi.org/10.3390/en15145242
Gregor R, Pacher J, Renault A, Comparatore L, Rodas J. Model Predictive Control of a Modular 7-Level Converter Based on SiC-MOSFET Devices—An Experimental Assessment. Energies. 2022; 15(14):5242. https://doi.org/10.3390/en15145242
Chicago/Turabian StyleGregor, Raúl, Julio Pacher, Alfredo Renault, Leonardo Comparatore, and Jorge Rodas. 2022. "Model Predictive Control of a Modular 7-Level Converter Based on SiC-MOSFET Devices—An Experimental Assessment" Energies 15, no. 14: 5242. https://doi.org/10.3390/en15145242
APA StyleGregor, R., Pacher, J., Renault, A., Comparatore, L., & Rodas, J. (2022). Model Predictive Control of a Modular 7-Level Converter Based on SiC-MOSFET Devices—An Experimental Assessment. Energies, 15(14), 5242. https://doi.org/10.3390/en15145242