
Hybrid Quasi-Optimal PID-SDRE Quadrotor Control



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Development of a flight controller for quad tilt-wing UAV that during its transition flight (with the change of wing angle) will be able to deal with high nonlinearity in this situation and provide drone stability [10];
- Development of a suboptimal integral sliding mode trajectory tracking anti-interference controller based on the state-dependent Riccati equation [11];
- Development of non-linear controllers for cargo UAVs to obtain precise robot flight and efficient reduction of load oscillations by exploiting the natural coupling between horizontal UAV movement and payload oscillation [12].
- Optimal attitude stabilization and control with finite time;
- An increasing precise attitude control method;
- Elimination of the PID stabilizer and the tuning problem.
2. Quadrotor Model
3. Control System Design
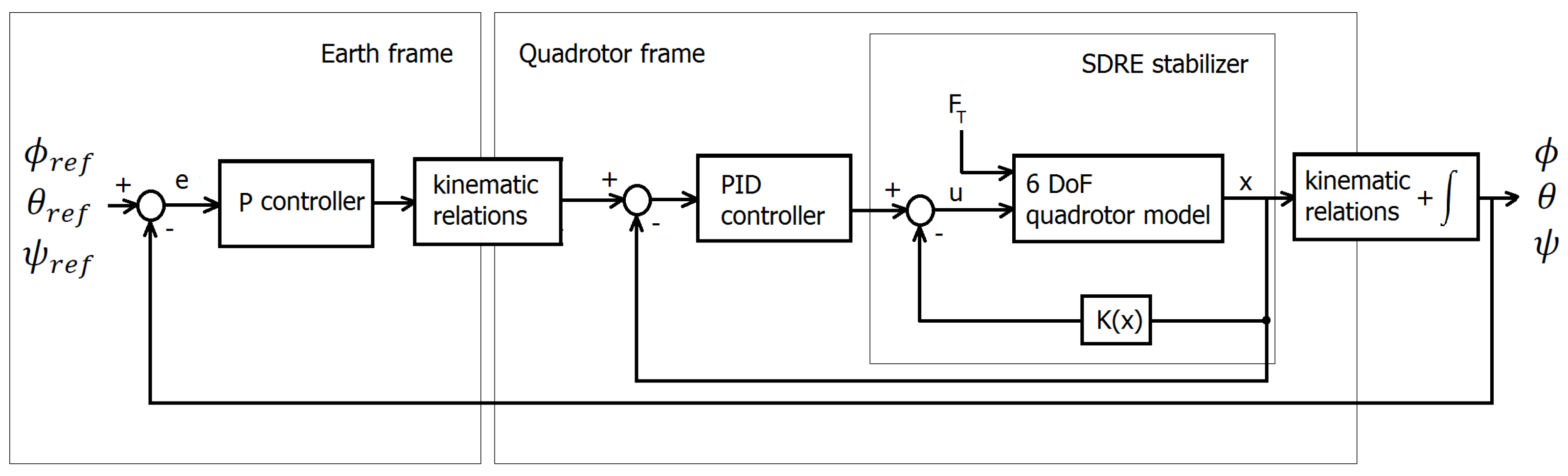
3.1. PID-SDRE Attitude Controller
- PID controller without SDRE stabilizer;
- SDRE feedback compensator neglecting PID stabilizer.
3.2. P-PID Attitude Controller
3.3. Finite-Time SDRE Stabilizer
4. Experimental Results
4.1. UAV Used in Simulation Experiments
- Take-off mass: 13 kg,
- Max. flight time: 40 min,
- Flight range: 4.5 kg,
- Optimal flight speed: 30 km/h,
- Max. flight speed: 60 km/h.
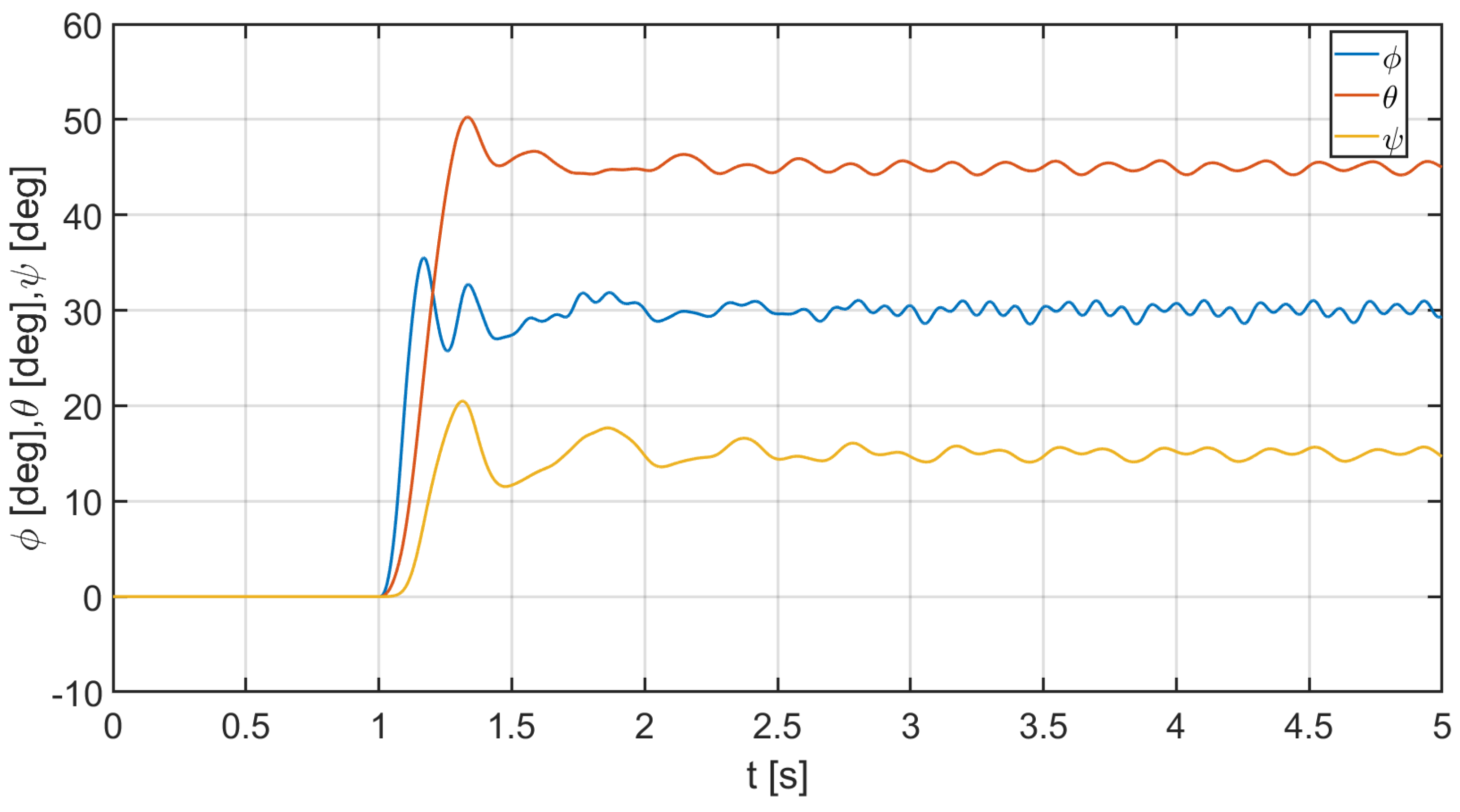
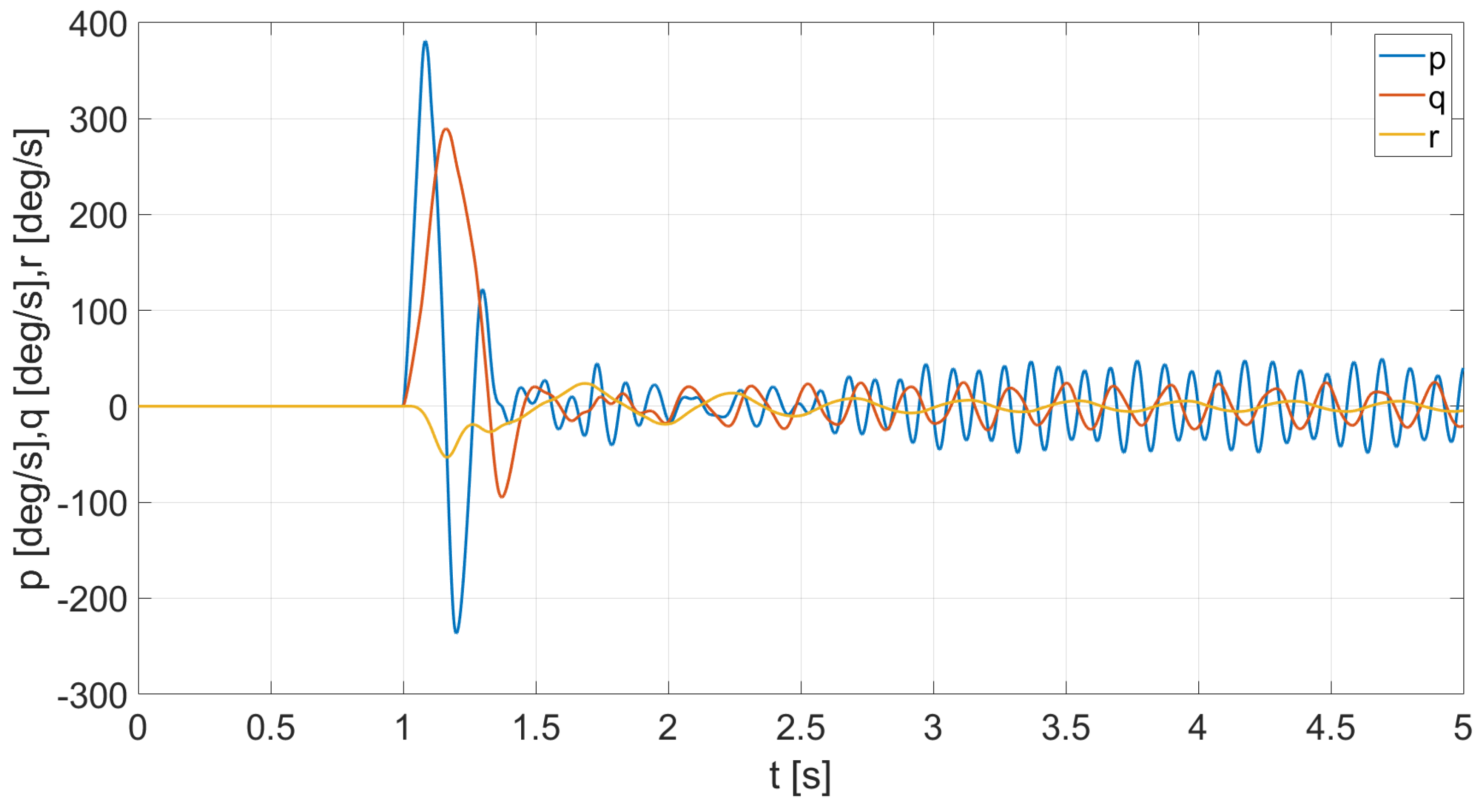
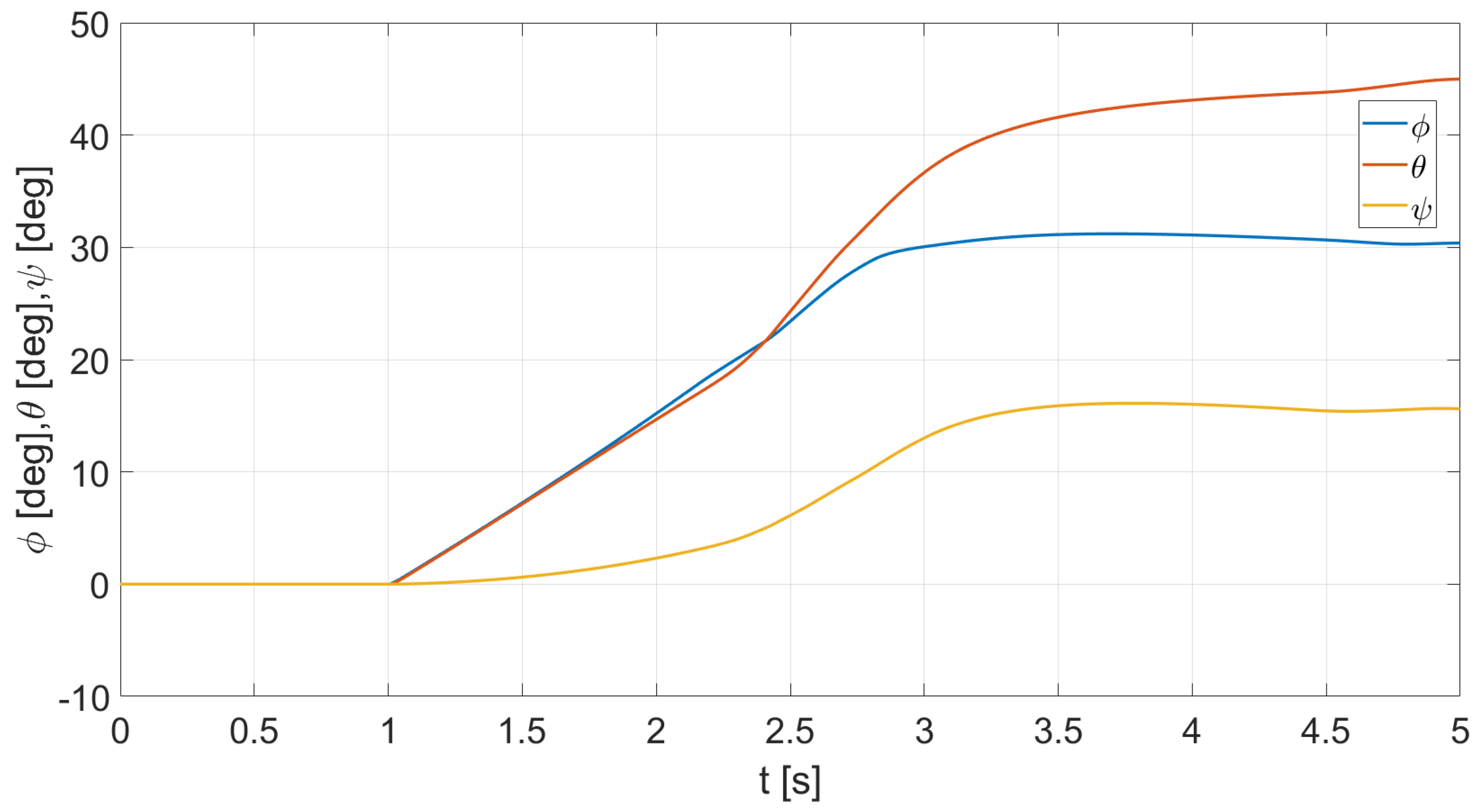
4.2. Simulation Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BF | Body Frame |
| EF | Earth Frame |
| EKF | Extended Kalman Filter |
| GPS | Global Positioning System |
| INS | Inertial Navigation System |
| NED | North-East-Down |
| PID | Proportional–Integral–Derivative Controller |
| QTW UAV | Quad Tilt-Wing Unmanned Aerial Vehicle |
| SDC | State-Dependent Coefficient |
| SDRE | State-Dependent Riccati Equation |
| UAV | Unmanned Aerial Vehicle |
References
- Kim, J.; Gadsden, S.A.; Wilkerson, S.A. A Comprehensive Survey of Control Strategies for Autonomous Quadrotors. Can. J. Electr. Comput. Eng. 2020, 43, 3–16. [Google Scholar] [CrossRef]
- Kornatowski, P.M.; Bhaskaran, A.; Heitz, G.M.; Mintchev, S.; Floreano, D. Last-Centimeter Personal Drone Delivery: Field Deployment and User Interaction. IEEE Robot. Autom. Lett. 2018, 43, 3813–3820. [Google Scholar] [CrossRef]
- Rao, J.; Li, B.; Zhang, Z.; Chen, D.; Giernacki, W. Position Control of Quadrotor UAV Based on Cascade Fuzzy Neural Network. Energies 2022, 15, 1763. [Google Scholar] [CrossRef]
- Lungu, M. Auto-landing of UAVs with variable centre of mass using the backstepping and dynamic inversion control. Aerosp. Sci. Technol. 2020, 103, 105912. [Google Scholar] [CrossRef]
- Orsag, M.; Korpela, C.; Oh, P. Modeling and Control of MM-UAV: Mobile Manipulating Unmanned Aerial Vehicle. J. Intell. Robot. Syst. Vol. 2013, 69, 227–240. [Google Scholar] [CrossRef]
- Huang, H.; Zhao, X.; Zhang, X. Intelligent Guidance and Control Methods for Missile Swarm. Comput. Intell. Neurosci. 2022, 2022, 8235148. [Google Scholar] [CrossRef]
- Voos, H. Nonlinear state-dependent Riccati equation control of a quadrotor UAV. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006; pp. 2547–2552. [Google Scholar] [CrossRef] [Green Version]
- Nemra, A.; Aouf, N. Robust INS/GPS Sensor Fusion for UAV Localization Using SDRE Nonlinear Filtering. IEEE Sens. J. 2010, 10, 789–798. [Google Scholar] [CrossRef] [Green Version]
- Khamis, A. Nonlinear Finite-Horizon Regulation and Tracking for Systems with Incomplete State Information Using Differential State Dependent Riccati Equation. Int. J. Aerosp. Eng. 2014, 78628, 178628. [Google Scholar] [CrossRef] [Green Version]
- Takayama, T.; Uchiyama, K.; Masuda, K. Controller Design Using SDRE Method for Tilt-Wing UAV. In Proceedings of the 2020 11th International Conference on Mechanical and Aerospace Engineering (ICMAE), Athens, Greece, 14–17 July 2020; pp. 102–106. [Google Scholar] [CrossRef]
- Hua, Z. Suboptimal Integral Sliding Mode Trajectory Tracking Control of a UAV Based on SDRE Method. In Advances in Guidance, Navigation and Control, Proceedings of the 2020 International Conference on Guidance, Navigation and Control, ICGNC 2020, Tianjin, China, 23–25 October 2020; Part of the Lecture Notes in Electrical Engineering Book Series (LNEE); Springer: Singapore, 2021; Volume 644, pp. 67–77. [Google Scholar] [CrossRef]
- Guerrero-Sanchez, M.E.; Lozano, R.; Castillo, P.; Hernandez-Gonzalez, O.; Garcia-Beltran, C.D.; Valencia-Palomo, G. Nonlinear control strategies for a UAV carrying a load with swing attenuation. Appl. Math. Model. 2021, 91, 709–722. [Google Scholar] [CrossRef]
- Nekoo, S.R.; Acosta, J.A.; Ollero, A. Quaternion-based state-dependent differential Riccati equation for quadrotor drones: Regulation control problem in aerobatic flight. Robotica 2022, 40, 1–16. [Google Scholar] [CrossRef]
- Nekoo, S.R.; Acosta, J.A.; Ollero, A. Geometric control using the state-dependent Riccati equation: Application to aerial-acrobatic maneuvers. Int. J. Control. 2021, 1–16. [Google Scholar] [CrossRef]
- Nekoo, S.R.; Acosta, J.A.; Ollero, A. Collision Avoidance of SDRE Controller using Artificial Potential Field Method: Application to Aerial Robotics. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020. [Google Scholar] [CrossRef]
- Monti, C. Model-Free Control of an Unmanned Aircraft Quadcopter Type System; Rochester Institute of Technology: Rochester, NY, USA, 2020. [Google Scholar]
- Bold, S.; Sosorbaram, B.; Chuluunjav, S. Mathematical Model Based PID Control of the Raspi Drone. Lect. Notes Electr. Eng. 2021, 712, 29–39. [Google Scholar] [CrossRef]
- Karahan, M.; Kasnakoglu, C. Modeling and Simulation of Quadrotor UAV Using PID Controller. In Proceedings of the 2019 11th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Pitesti, Romania, 27–29 June 2019. [Google Scholar]
- Banks, H.T.; Lewis, B.M.; Tran, H.T. Nonlinear feedback controllers and compensators: A state-dependent Riccati equation approach. Comput. Optim. Appl. 2018, 37, 177–218. [Google Scholar] [CrossRef] [Green Version]
- Çimen, T.; Banks, S.P. Global optimal feedback control for general nonlinear systems with non-quadratic performance criteria. Syst. Control Lett. 2004, 53, 327–346. [Google Scholar] [CrossRef]
- Çimen, T. Systematic and effective design of nonlinear feedback controllers via the state-dependent Riccati equation (SDRE) method. Annu. Rev. Control. 2010, 34, 32–51. [Google Scholar] [CrossRef]
- Cloutier, J.R.; D’Souza, C.N.; Mracek, C.P. Nonlinear regulation and nonlinear H∞ control via the state-dependent Riccati equation technique: Part 1, Theory; Part 2, Examples. In Proceedings of the First International Conference on Nonlinear Problems in Aviation and Aerospace, Daytona Beach, FL, USA, 9–11 May 1996; pp. 117–141. [Google Scholar]
- Shamma, J.S.; Cloutier, J.R. Existence of SDRE stabilizing feedback. IEEE Trans. Autom. Control. 2003, 48, 513–517. [Google Scholar] [CrossRef]
- Erdem, E.B.; Alleyne, A.G. Design of a class of nonlinear controllers via state dependent Riccati equations. IEEE Trans. Control. Syst. Technol. 2004, 12, 133–137. [Google Scholar] [CrossRef]
- Hammett, K.D.; Hall, C.D.; Ridgely, D.B. Controllability issues in nonlinear state-dependent Riccati equation control. J. Guid. Control. Dyn. 1998, 21, 767–773. [Google Scholar] [CrossRef]
- Heydari, A.; Balakrishnan, S.N. Closed-form solution to finite-horizon suboptimal control of nonlinear systems. Int. J. Robust Nonlinear Control 2015, 25, 2687–2704. [Google Scholar] [CrossRef]
- Mracek, C.; Cloutier, J. Control designs for the nonlinear benchmark problem via the state-dependent Riccati equation method. Int. J. Robust Nonlinear Control. 1998, 8, 401–433. [Google Scholar] [CrossRef]
- Wernli, A.; Cook, G. Suboptimal control for the nonlinear quadratic regulator problem. Automatica 1975, 11, 75–84. [Google Scholar] [CrossRef]
- Liang, Y.; Lin, L. Analysis of SDC matrices for successfully implementing the SDRE scheme. Automatica 2013, 49, 3120–3124. [Google Scholar] [CrossRef]
- Korayem, M.; Nekoo, S. Finite-time state-dependent Riccati equation for time-varying nonaffine systems: Rigid and flexible joint manipulator control. ISA Trans. 2015, 54, 125–144. [Google Scholar] [CrossRef] [PubMed]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giernacki, W.; Stępień, S.; Chodnicki, M.; Wróblewska, A. Hybrid Quasi-Optimal PID-SDRE Quadrotor Control. Energies 2022, 15, 4312. https://doi.org/10.3390/en15124312
Giernacki W, Stępień S, Chodnicki M, Wróblewska A. Hybrid Quasi-Optimal PID-SDRE Quadrotor Control. Energies. 2022; 15(12):4312. https://doi.org/10.3390/en15124312
Chicago/Turabian StyleGiernacki, Wojciech, Sławomir Stępień, Marcin Chodnicki, and Agnieszka Wróblewska. 2022. "Hybrid Quasi-Optimal PID-SDRE Quadrotor Control" Energies 15, no. 12: 4312. https://doi.org/10.3390/en15124312
APA StyleGiernacki, W., Stępień, S., Chodnicki, M., & Wróblewska, A. (2022). Hybrid Quasi-Optimal PID-SDRE Quadrotor Control. Energies, 15(12), 4312. https://doi.org/10.3390/en15124312