
A Proposed Controllable Crowbar for a Brushless Doubly-Fed Reluctance Generator, a Grid-Integrated Wind Turbine



Abstract
:1. Introduction
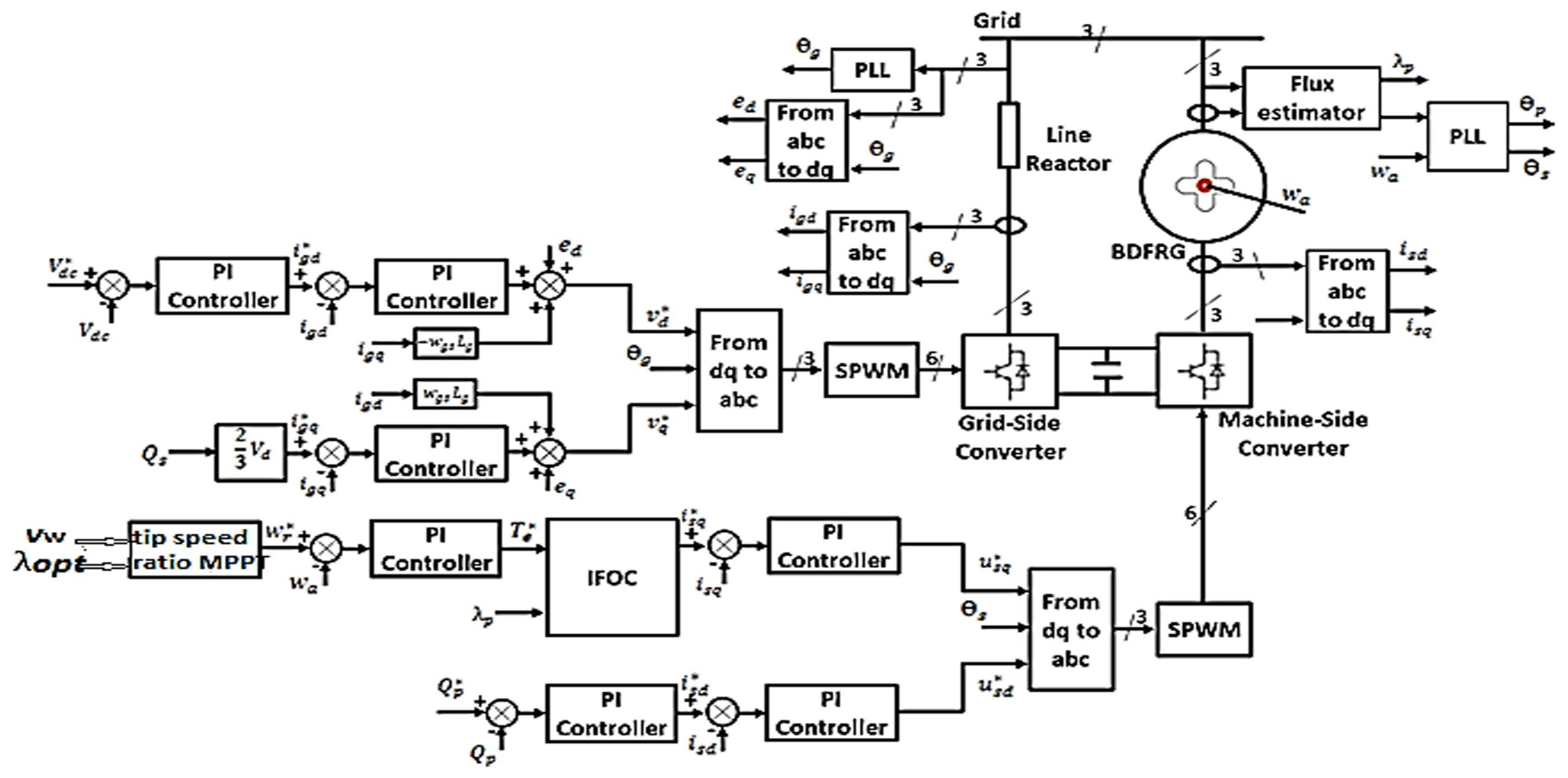
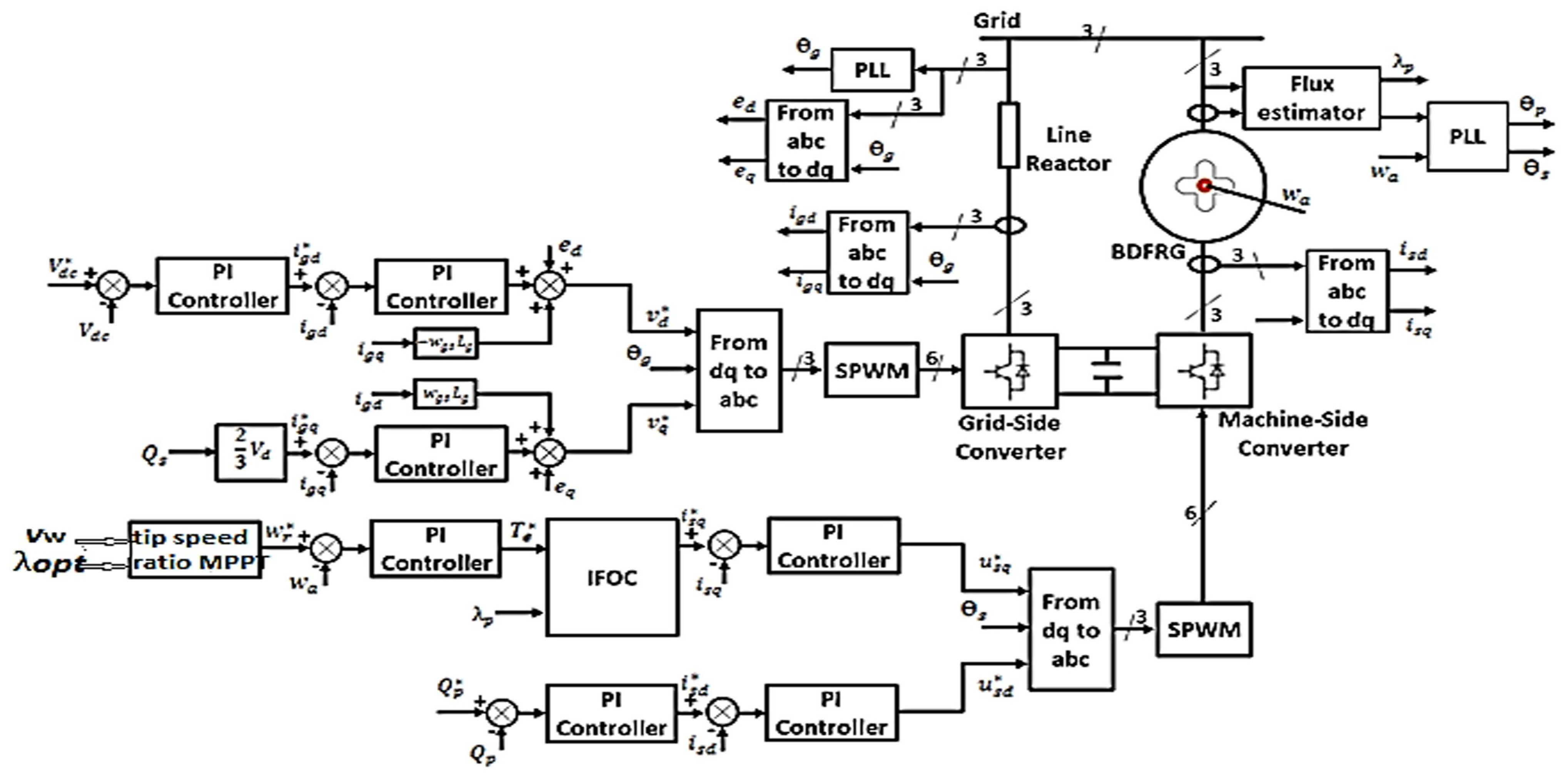
2. BDFRG Dynamic Model
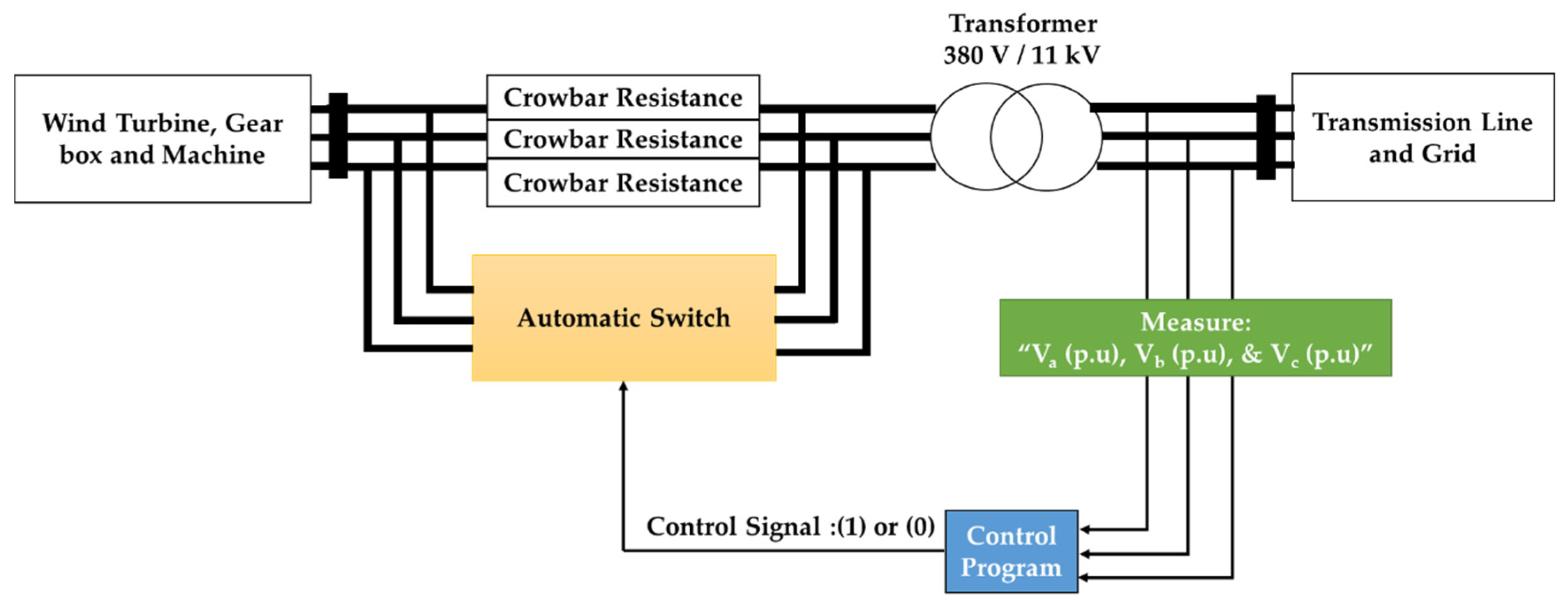
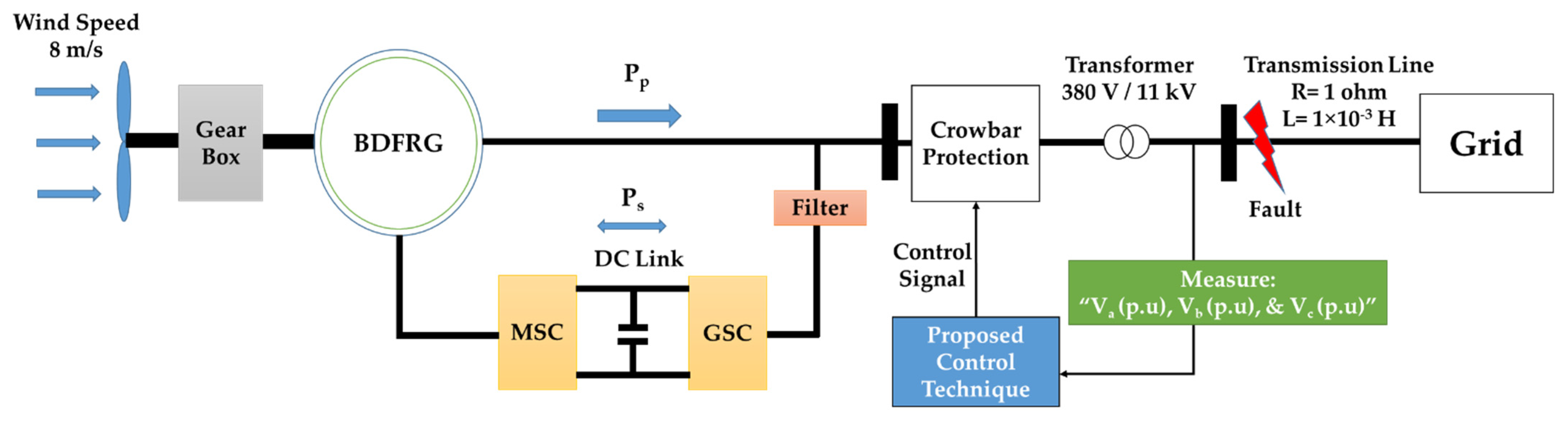
3. The Crowbar
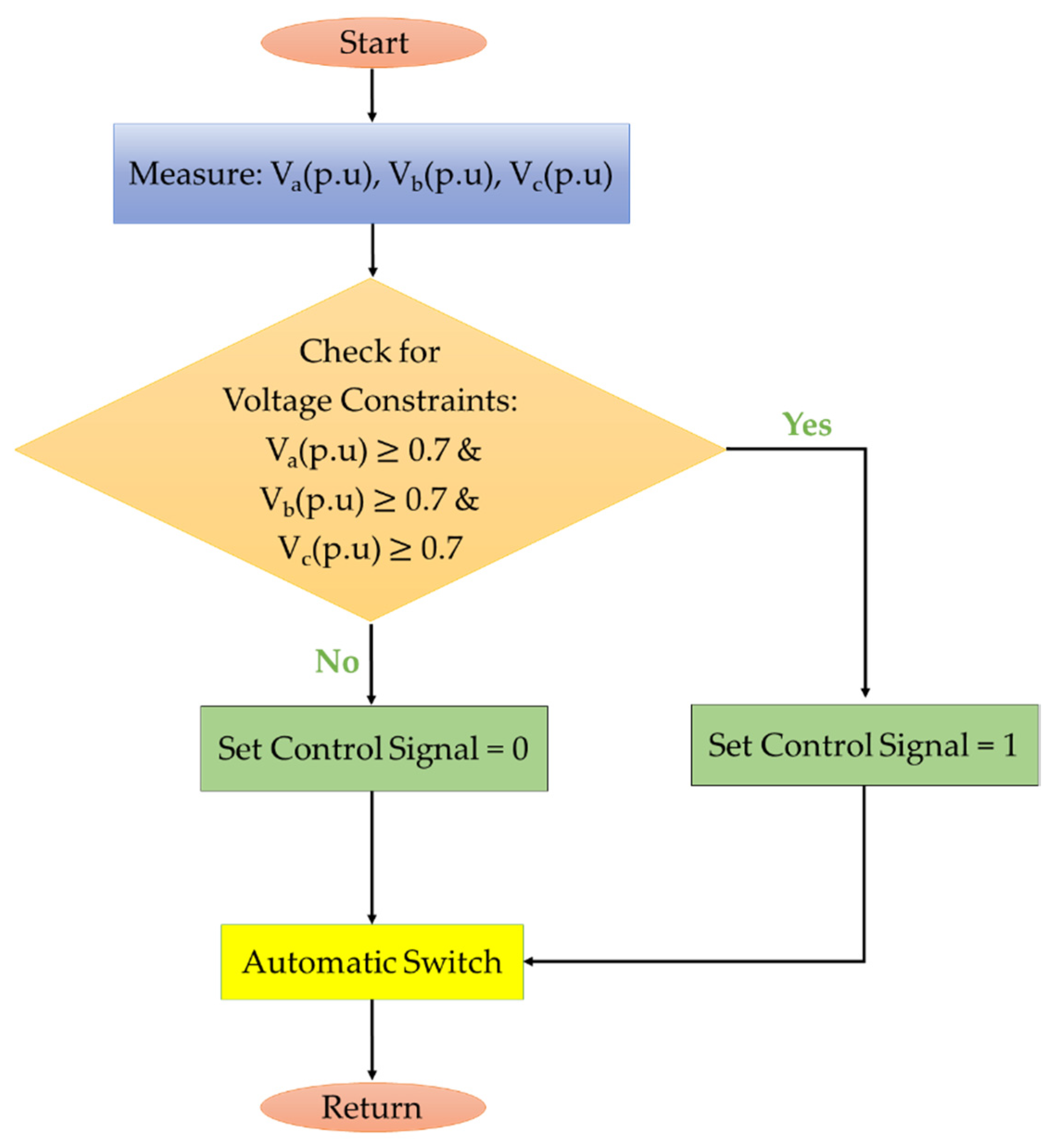
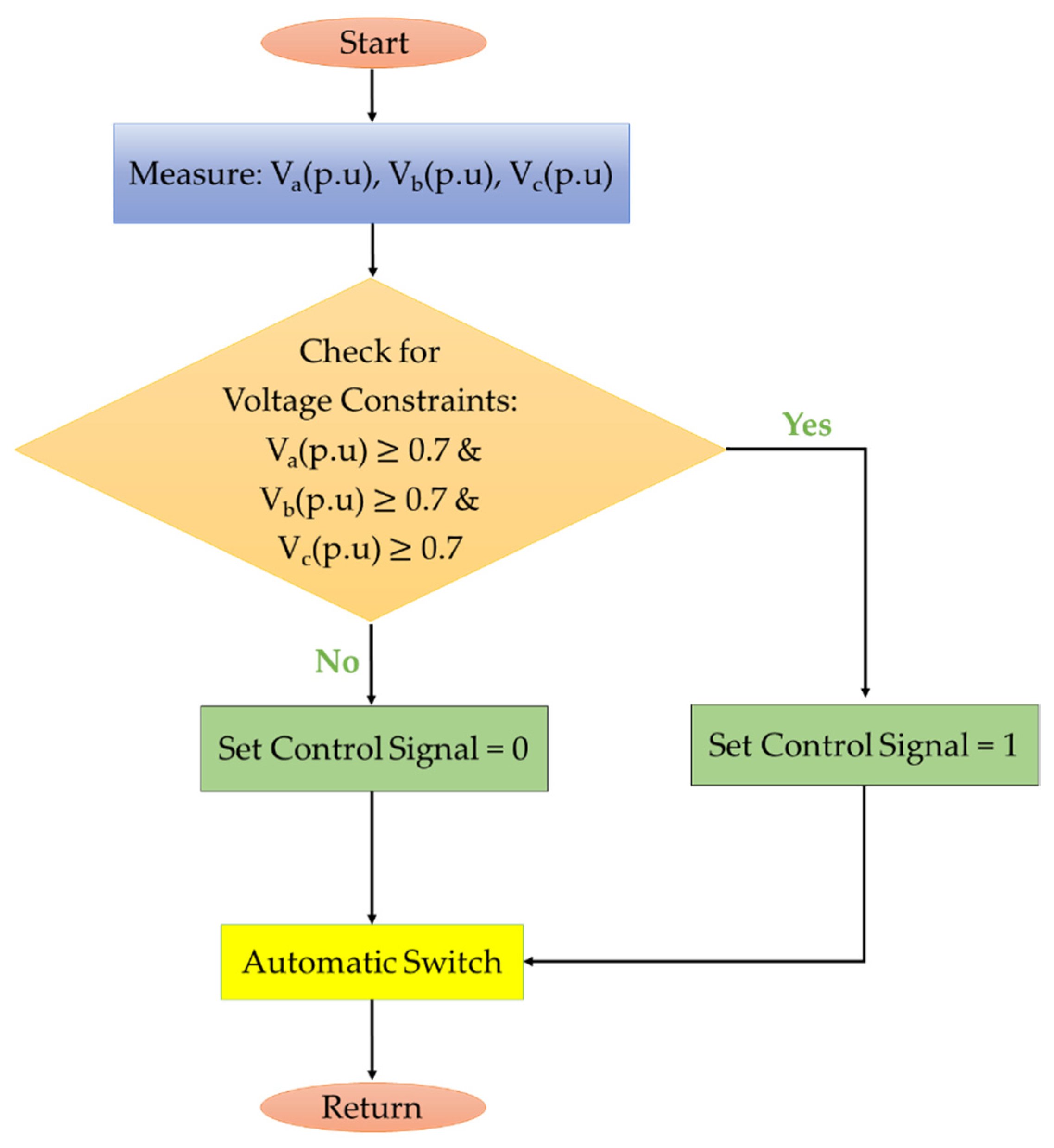
4. The Proposed Crowbar Control Strategy
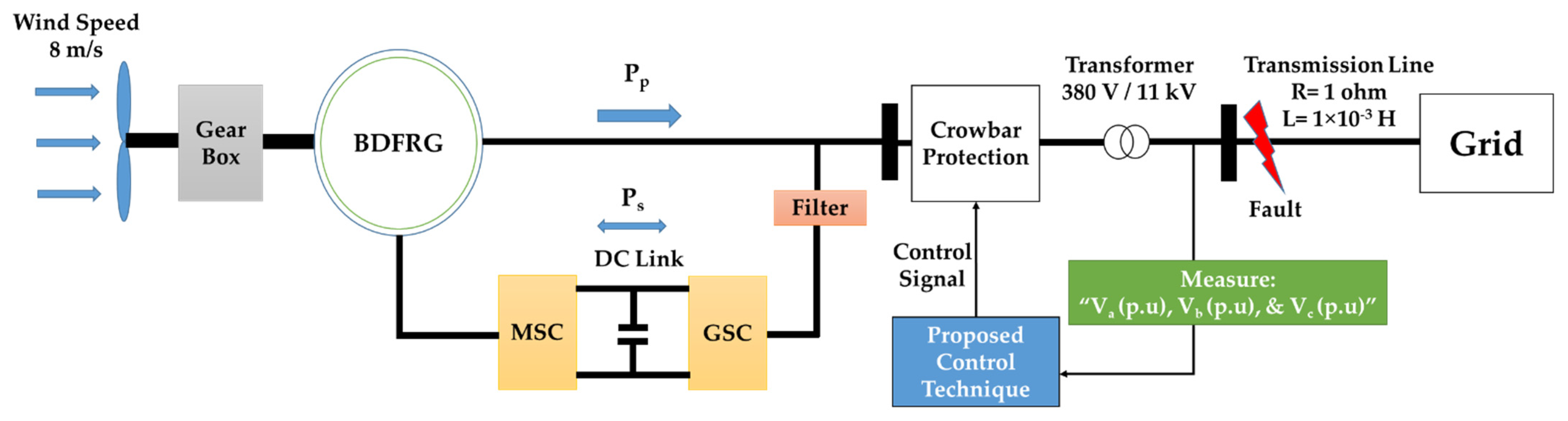
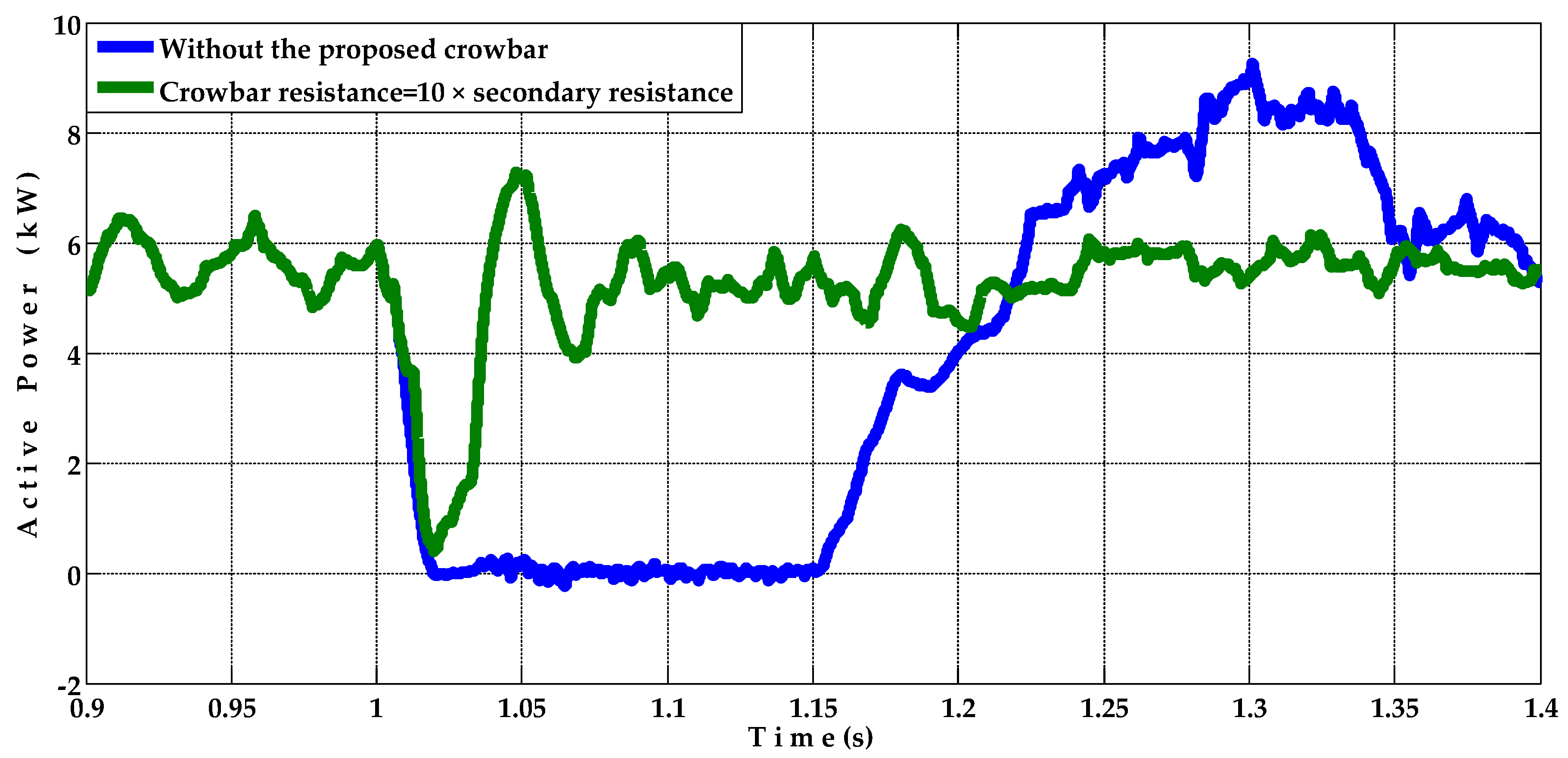
5. Simulation Results
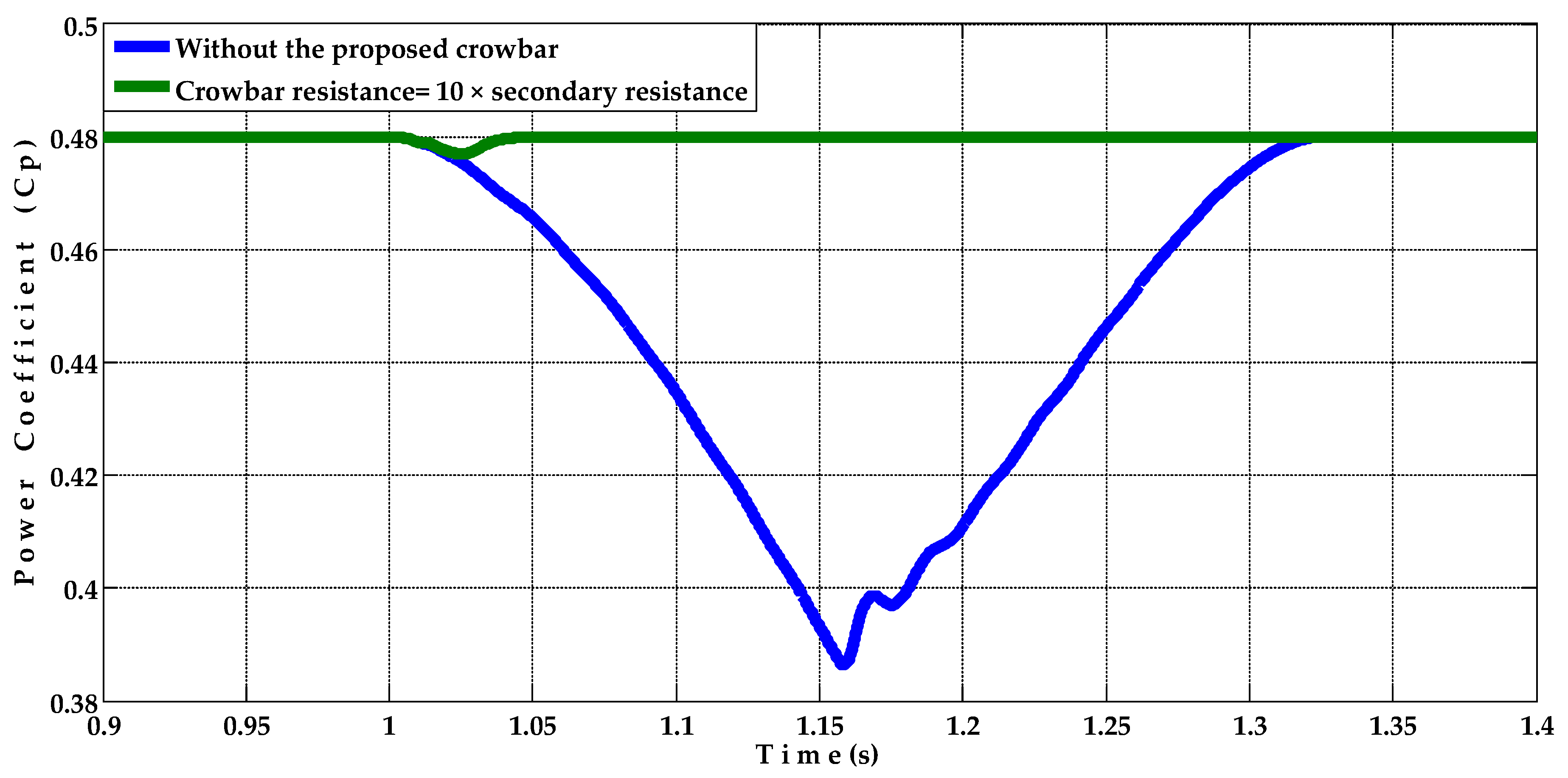
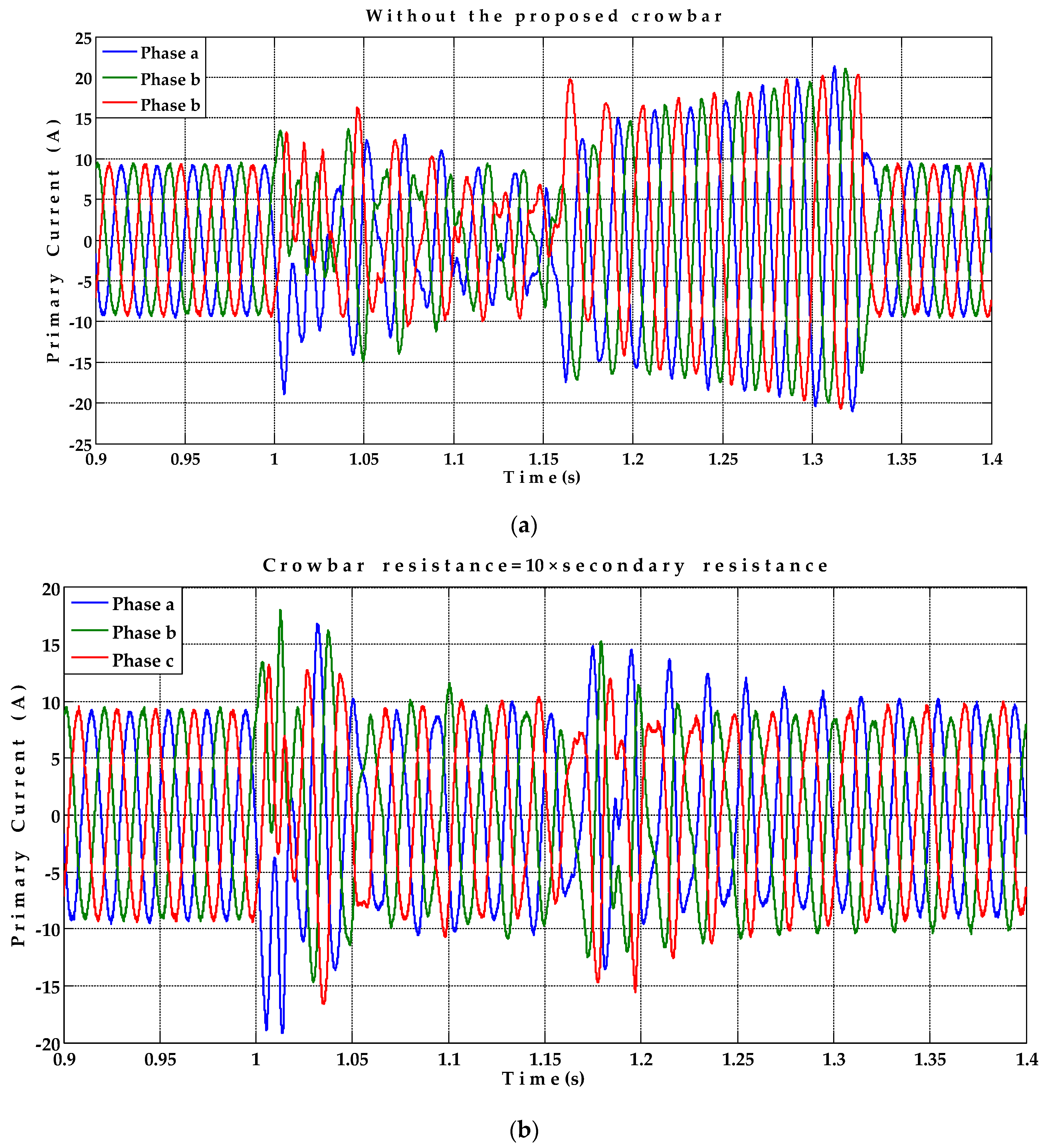
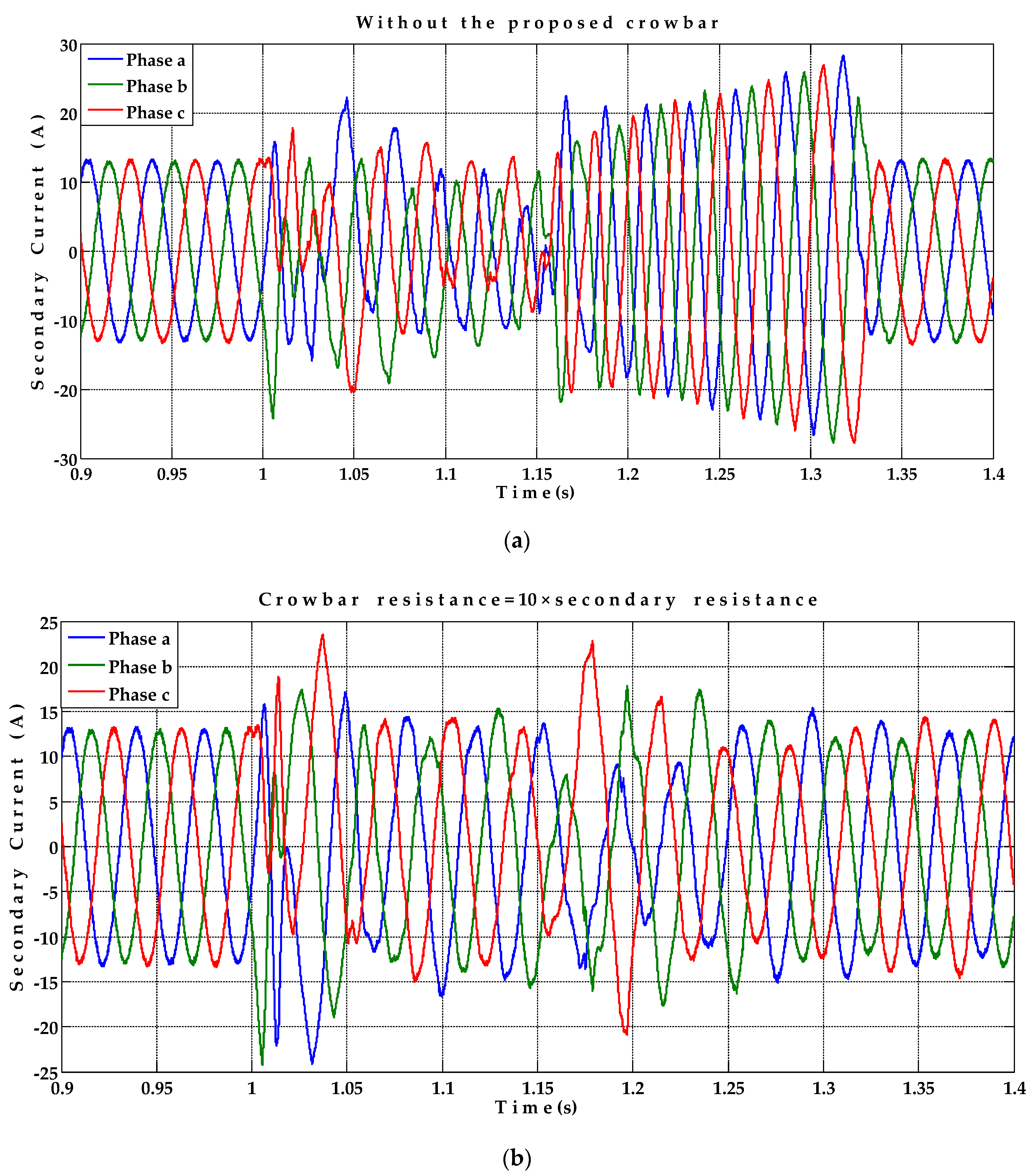
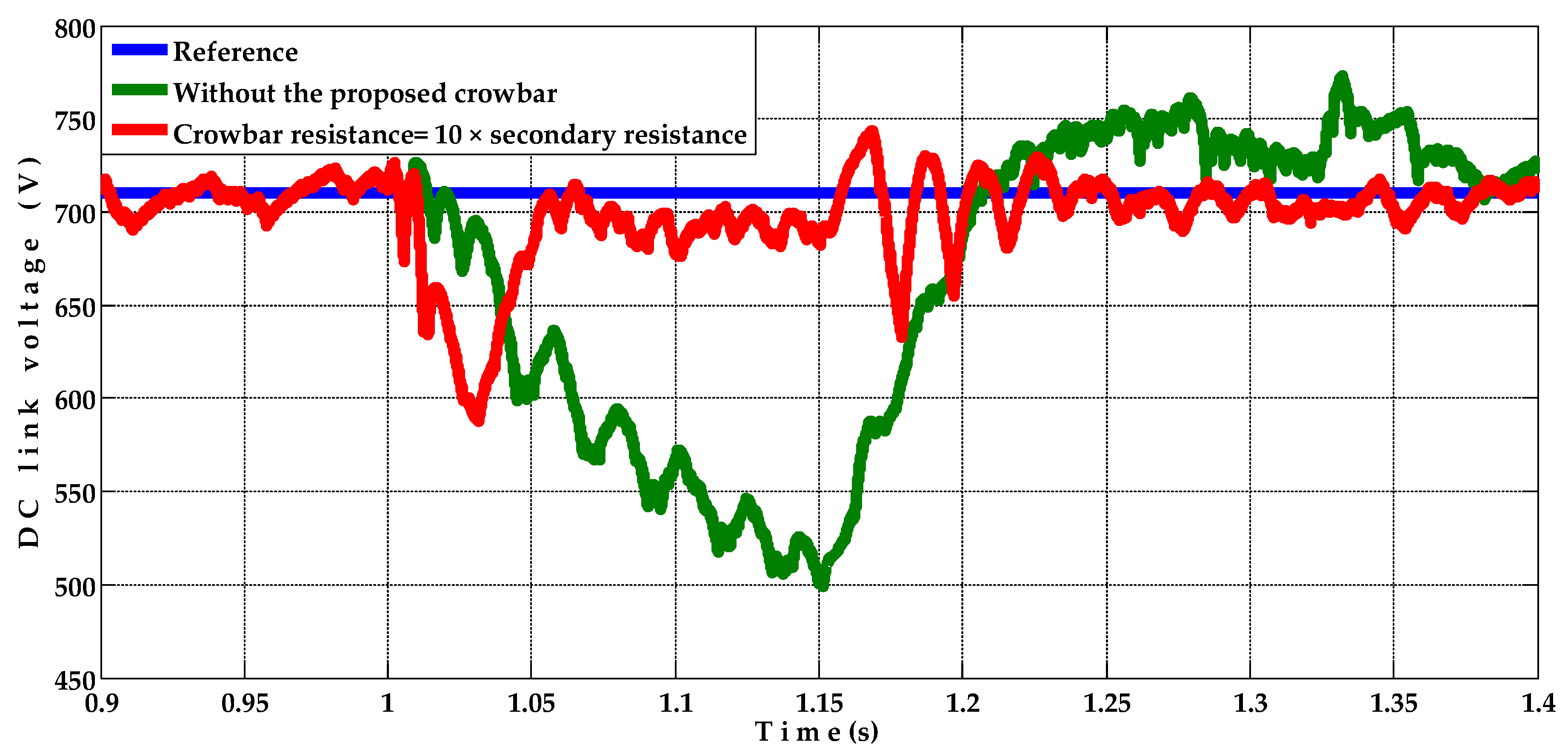
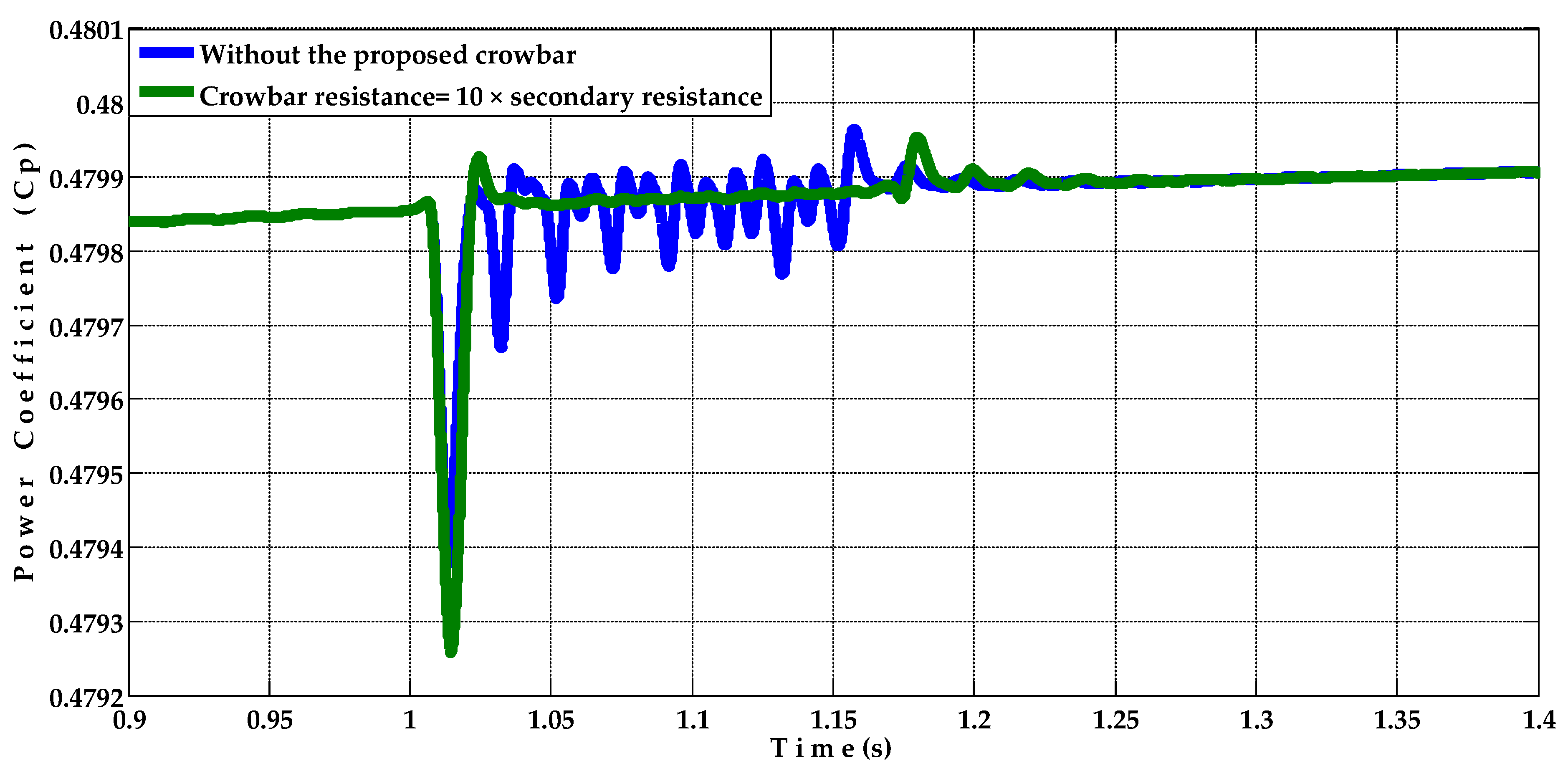
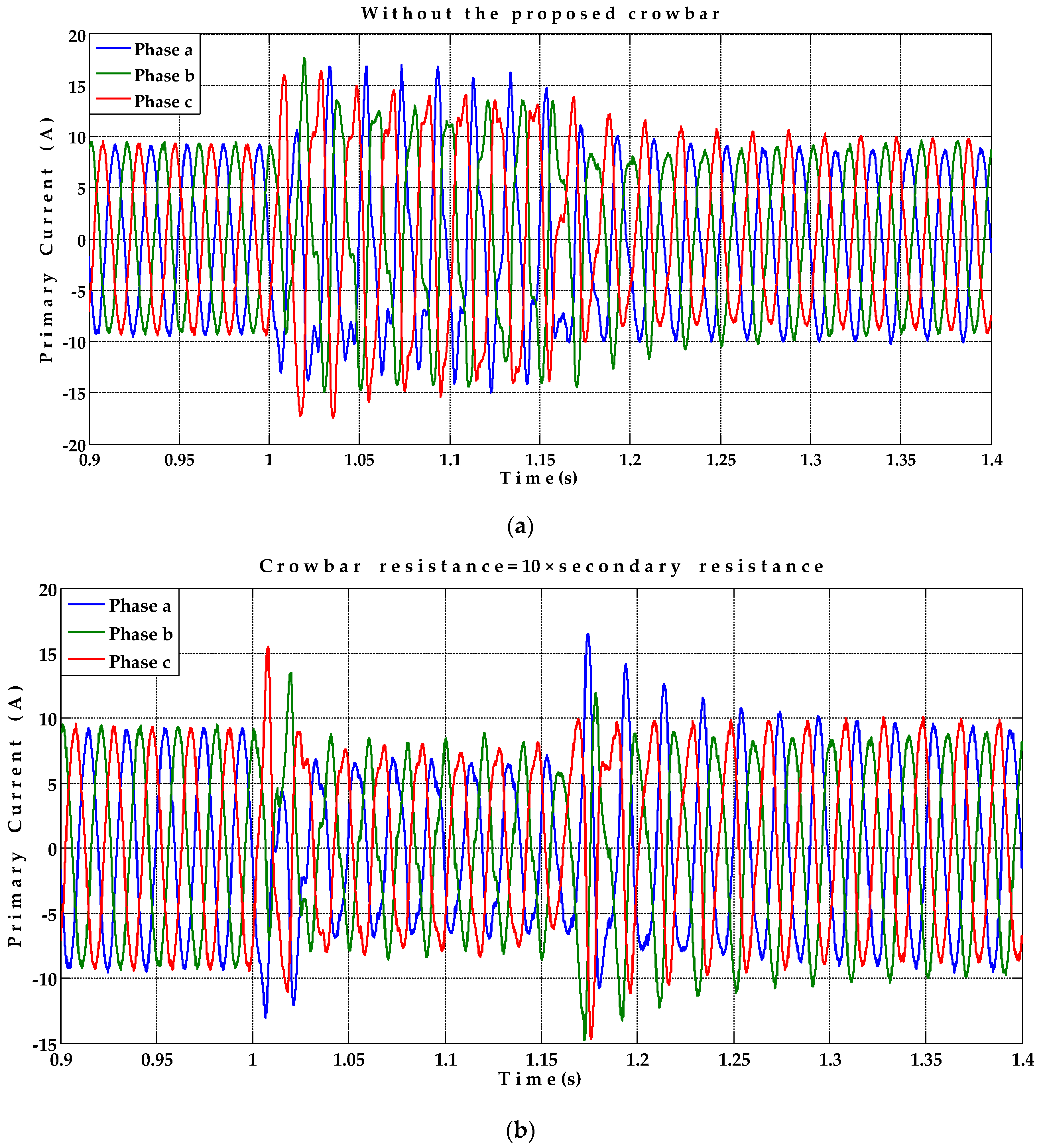
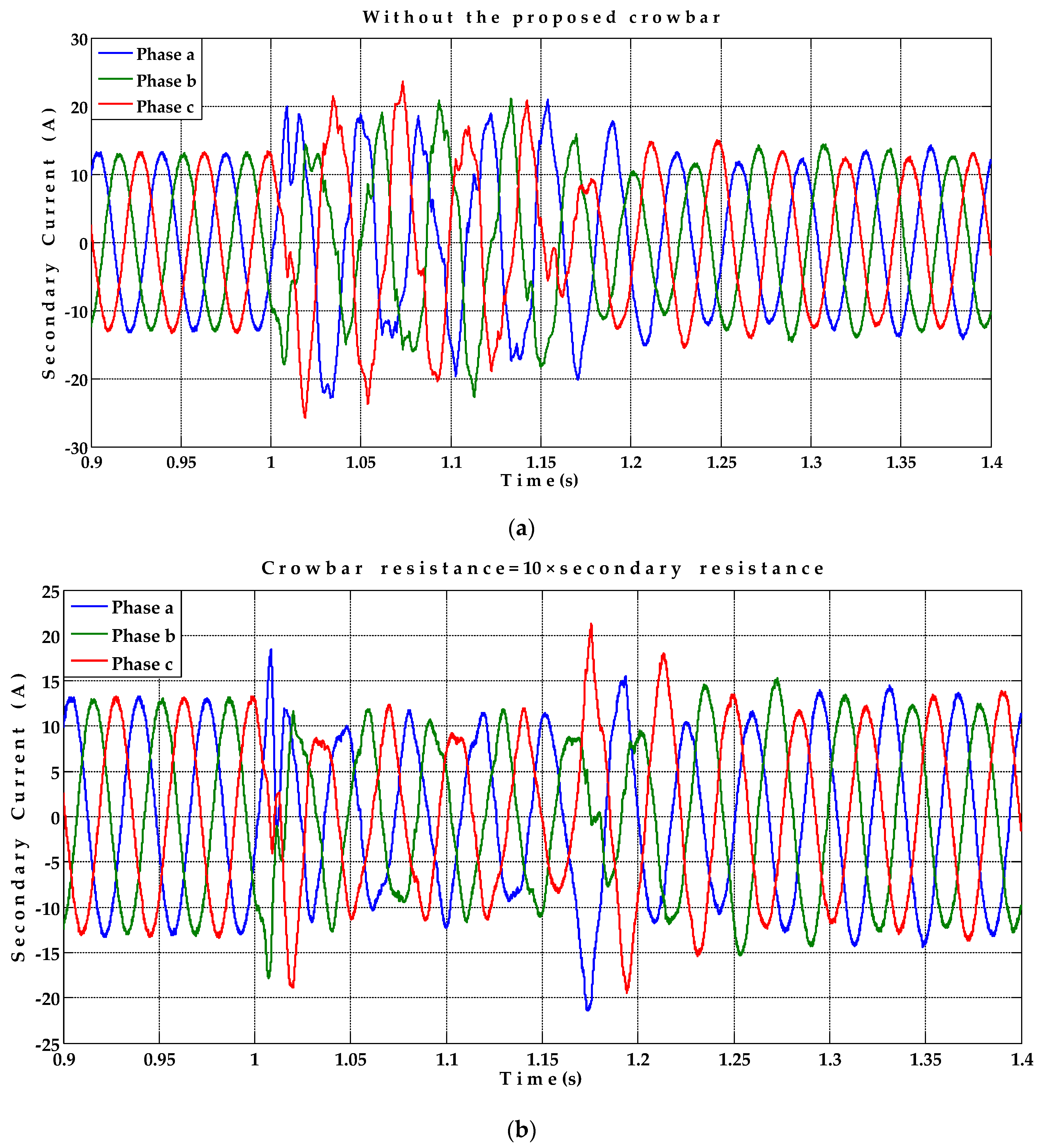
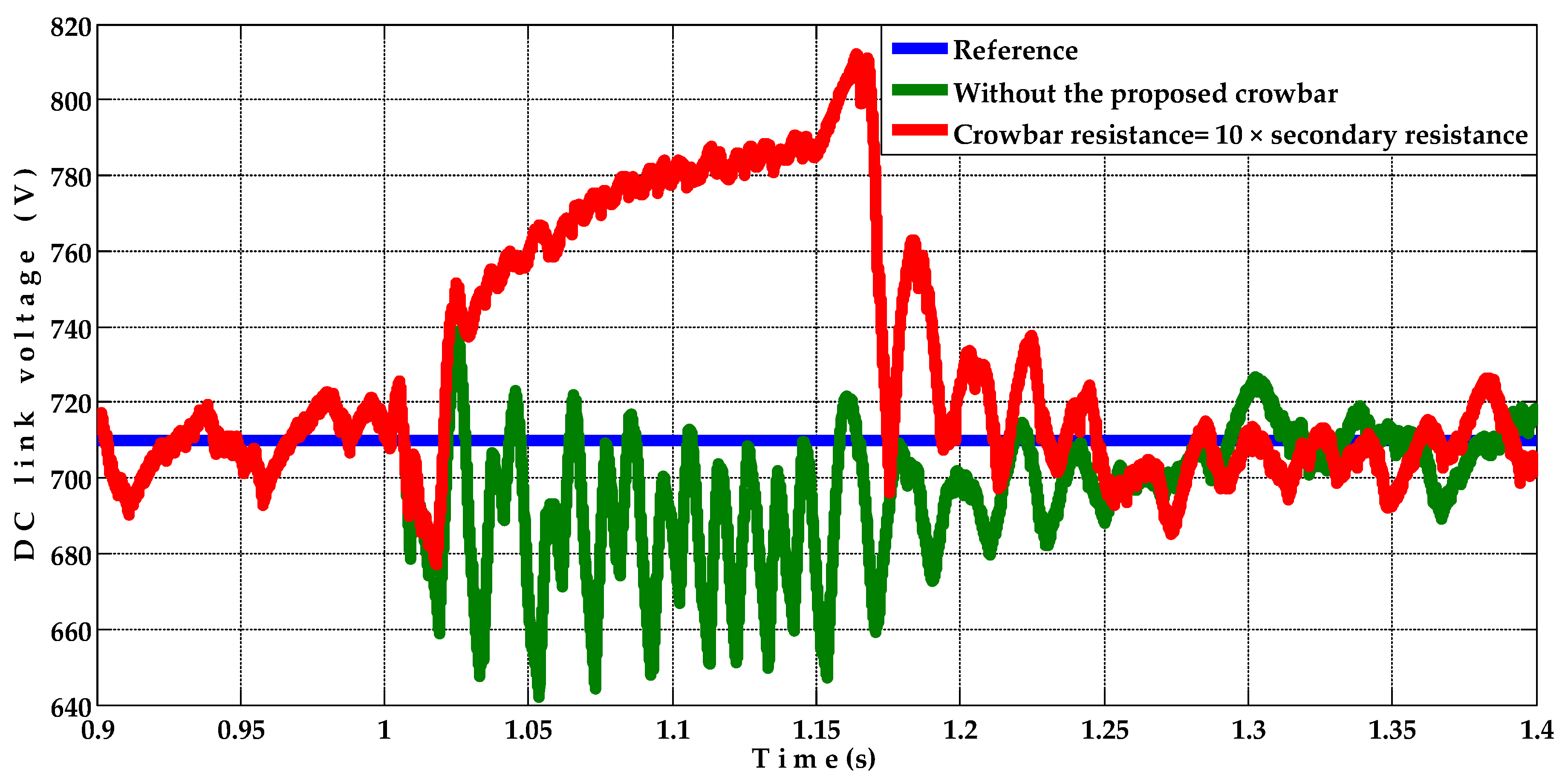
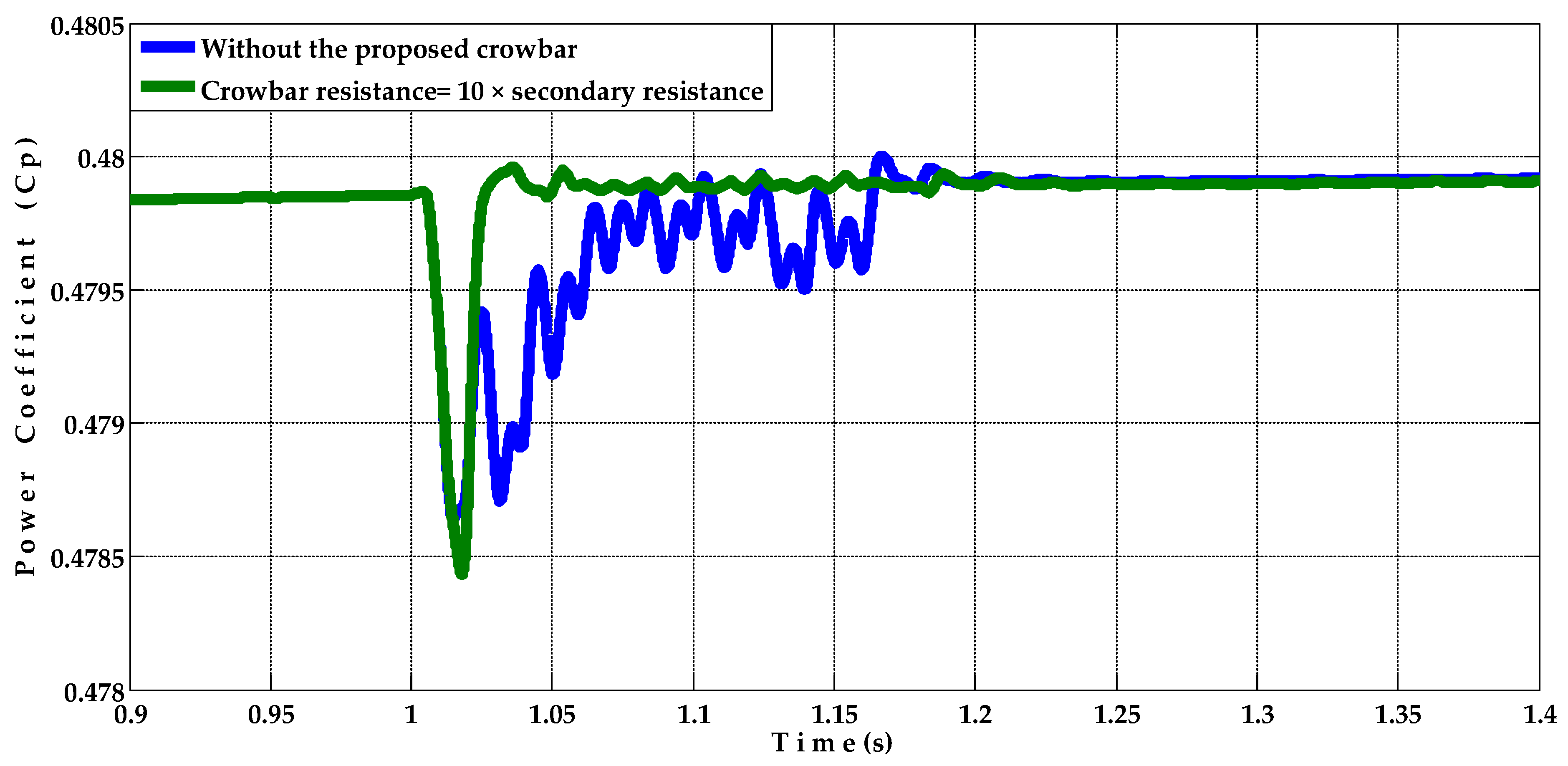
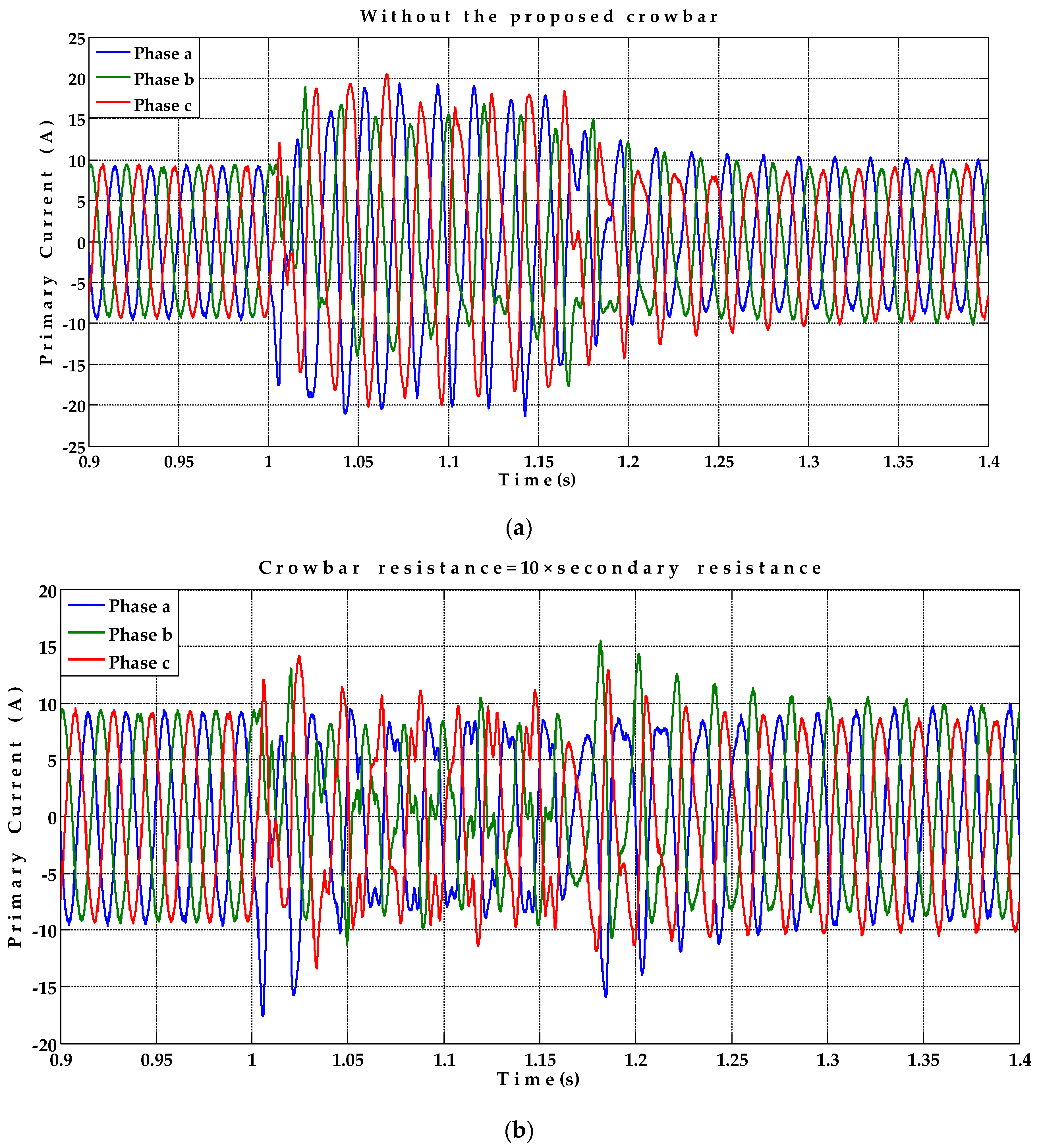
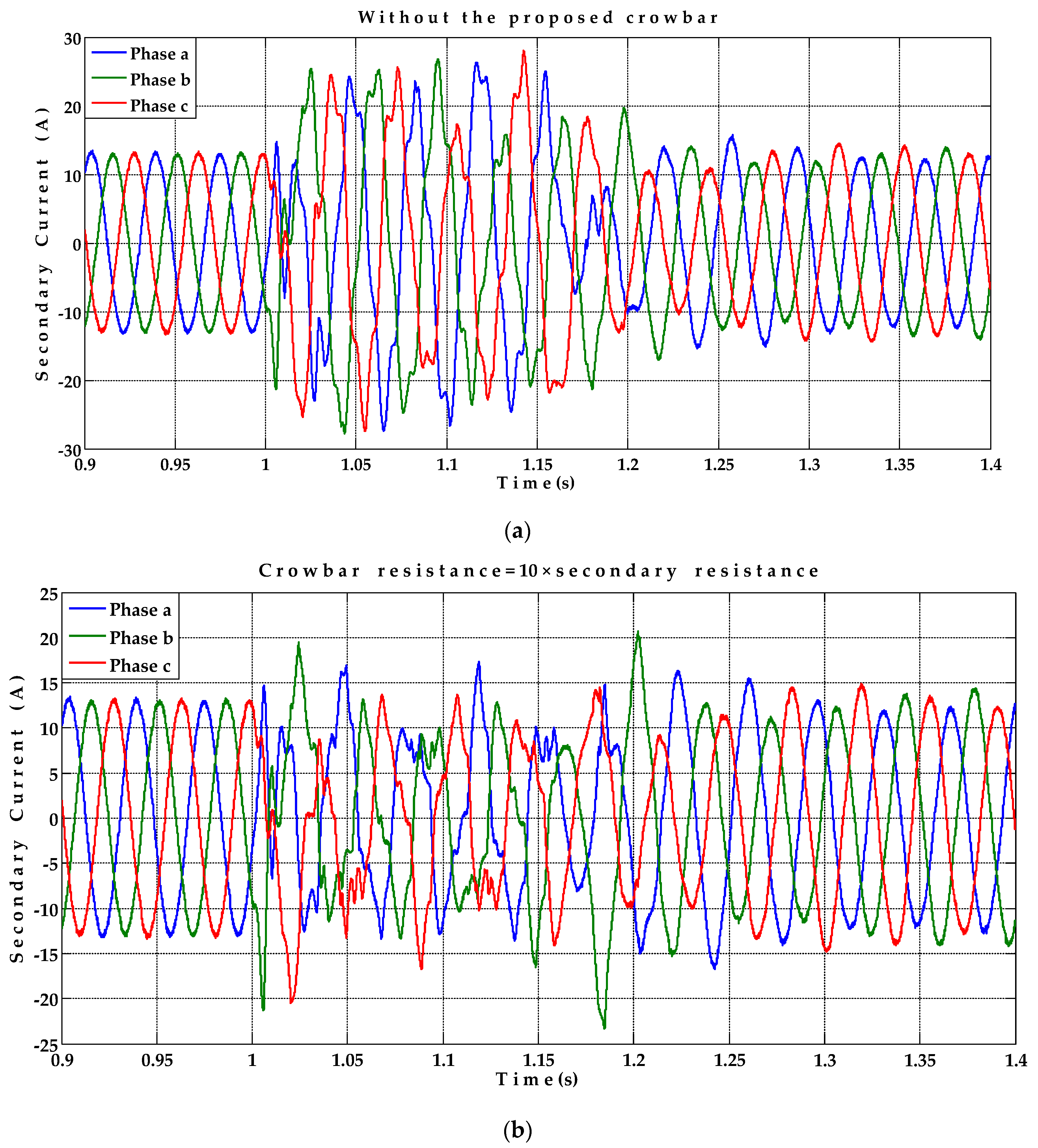
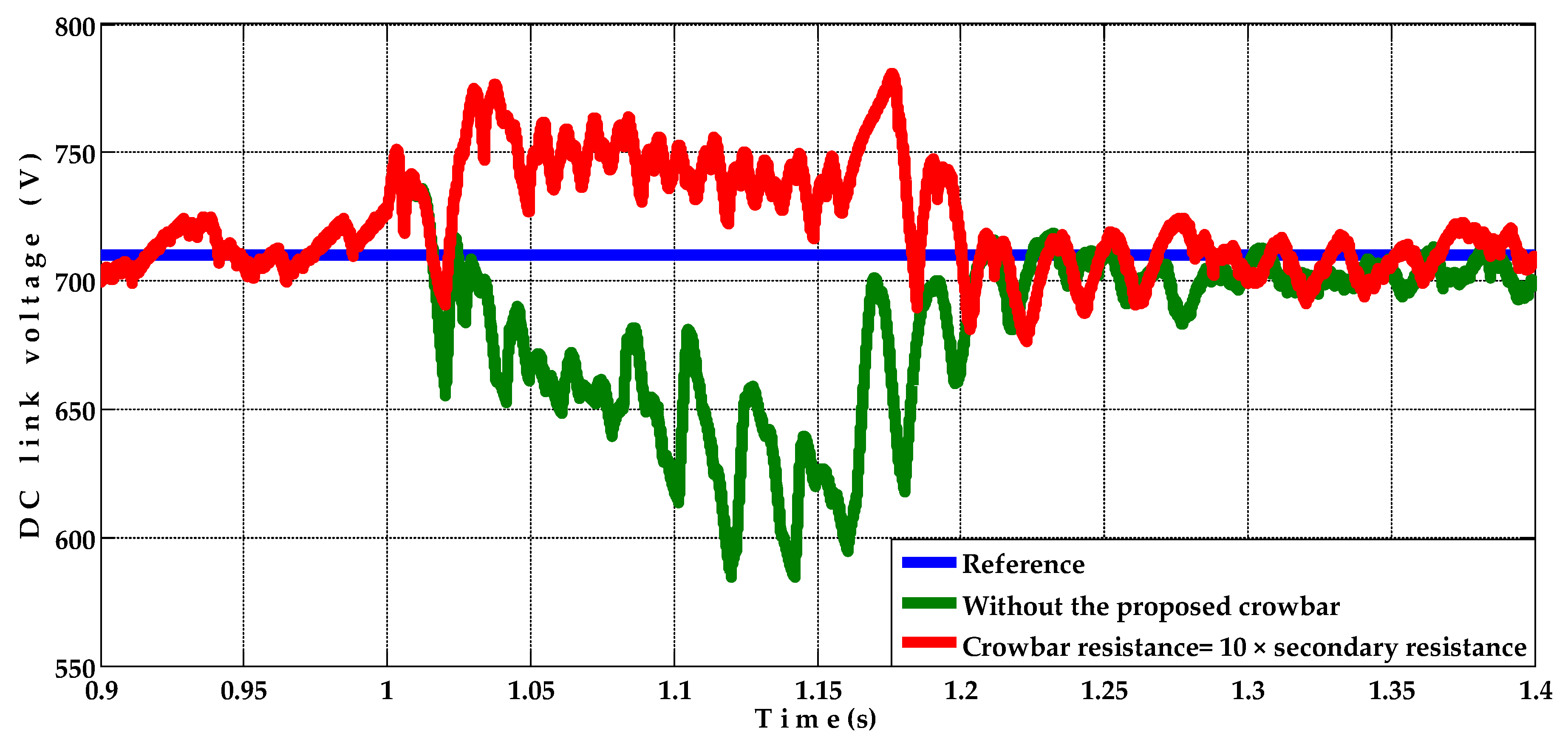
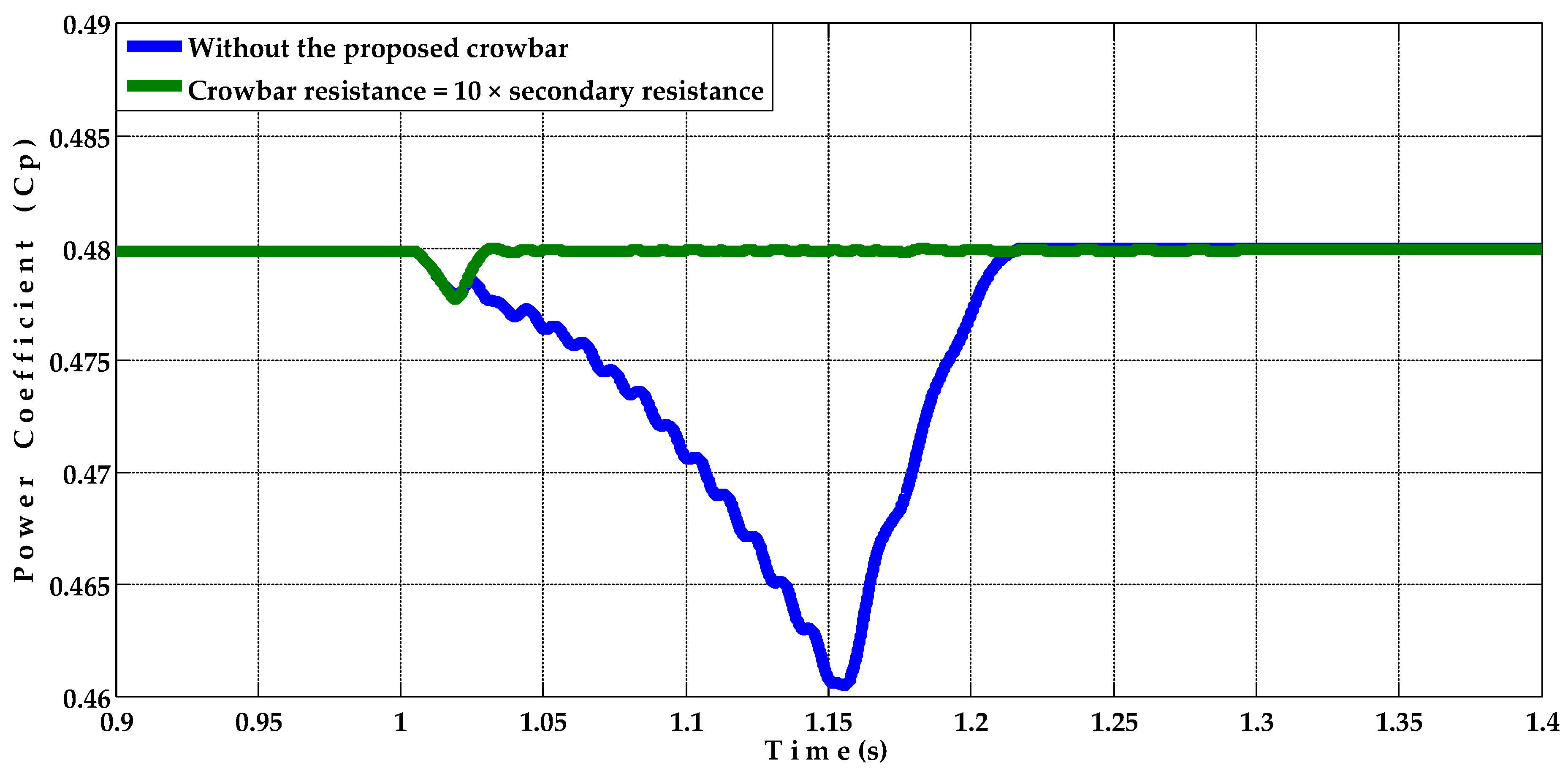
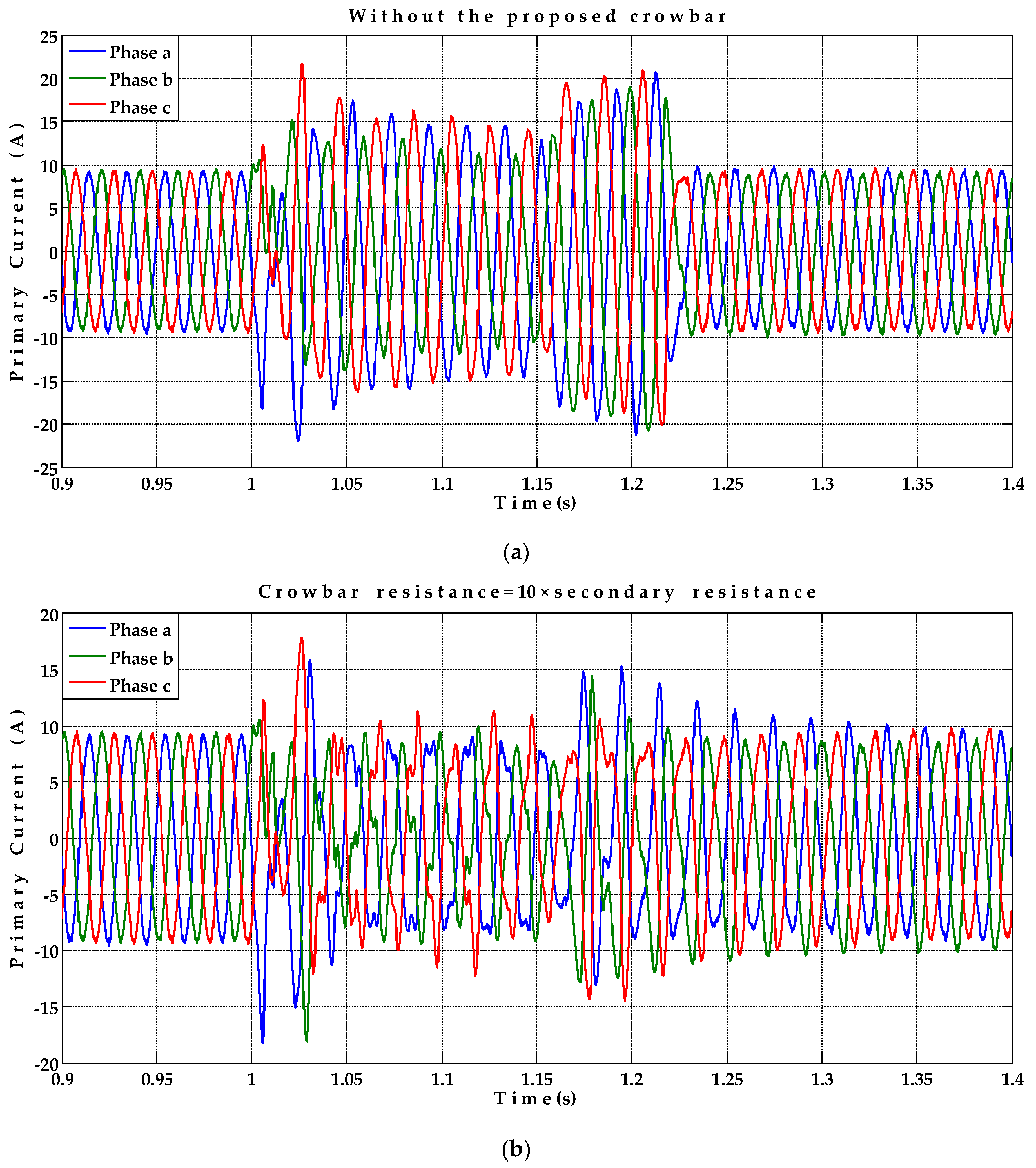
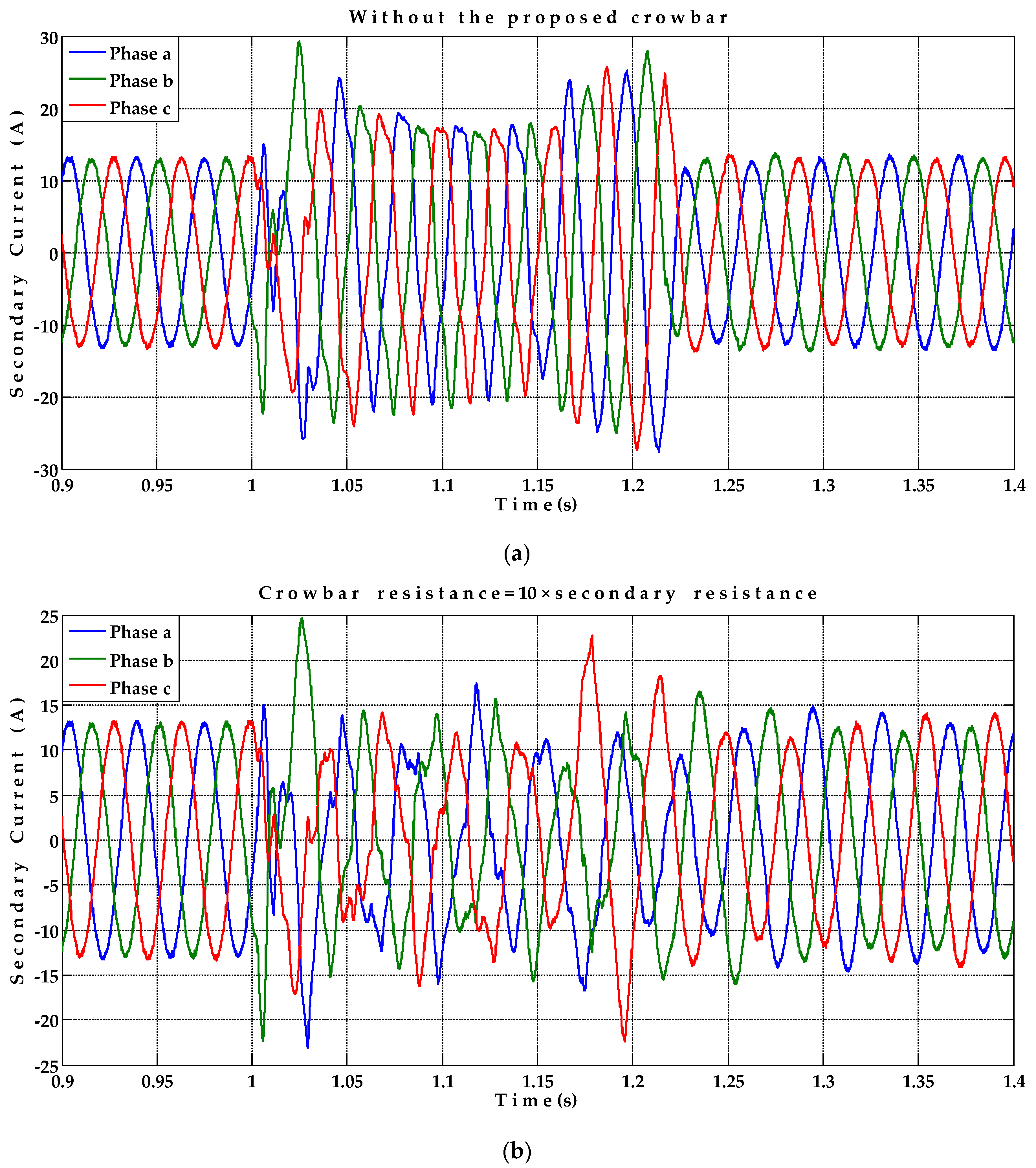
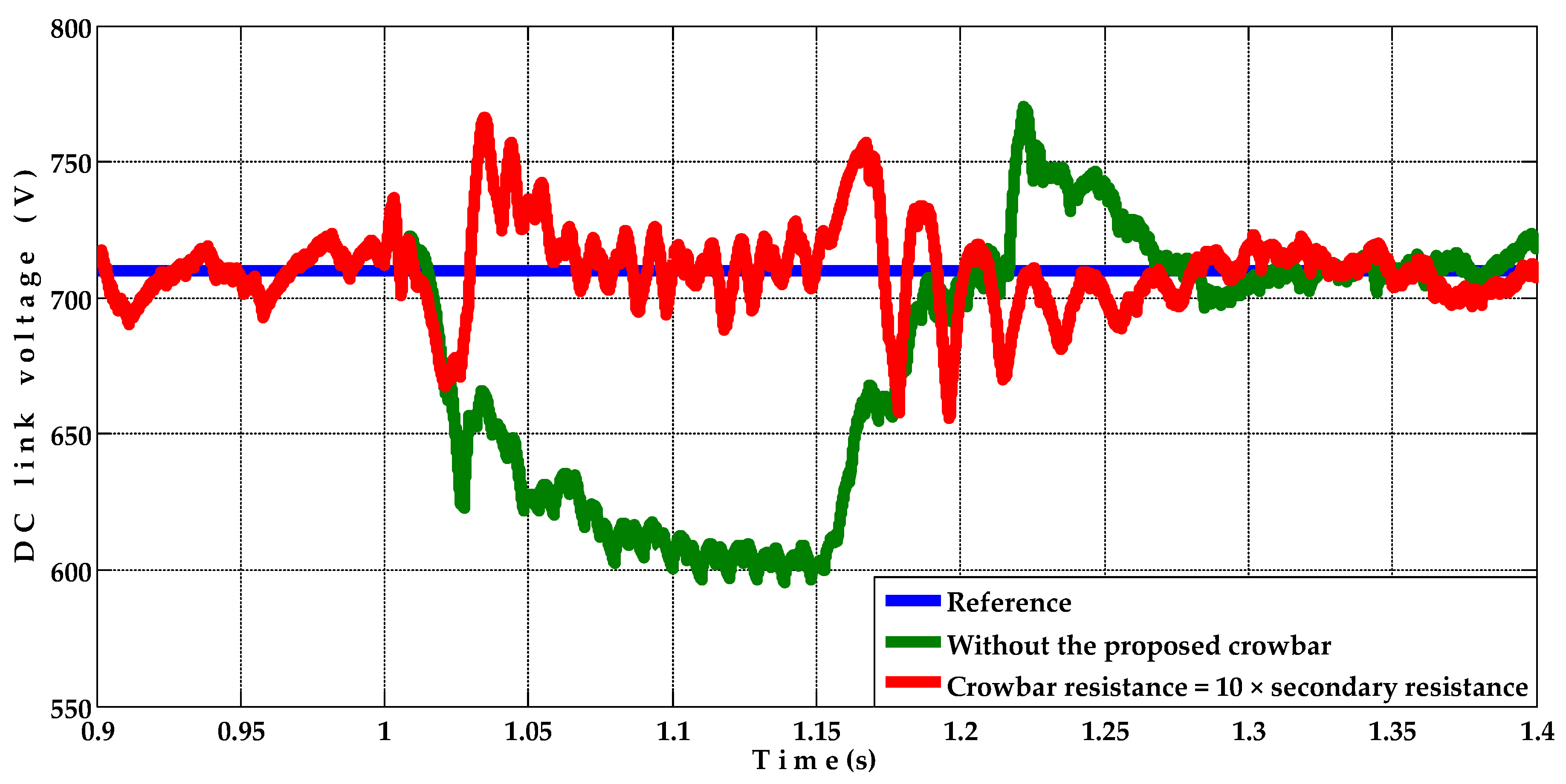
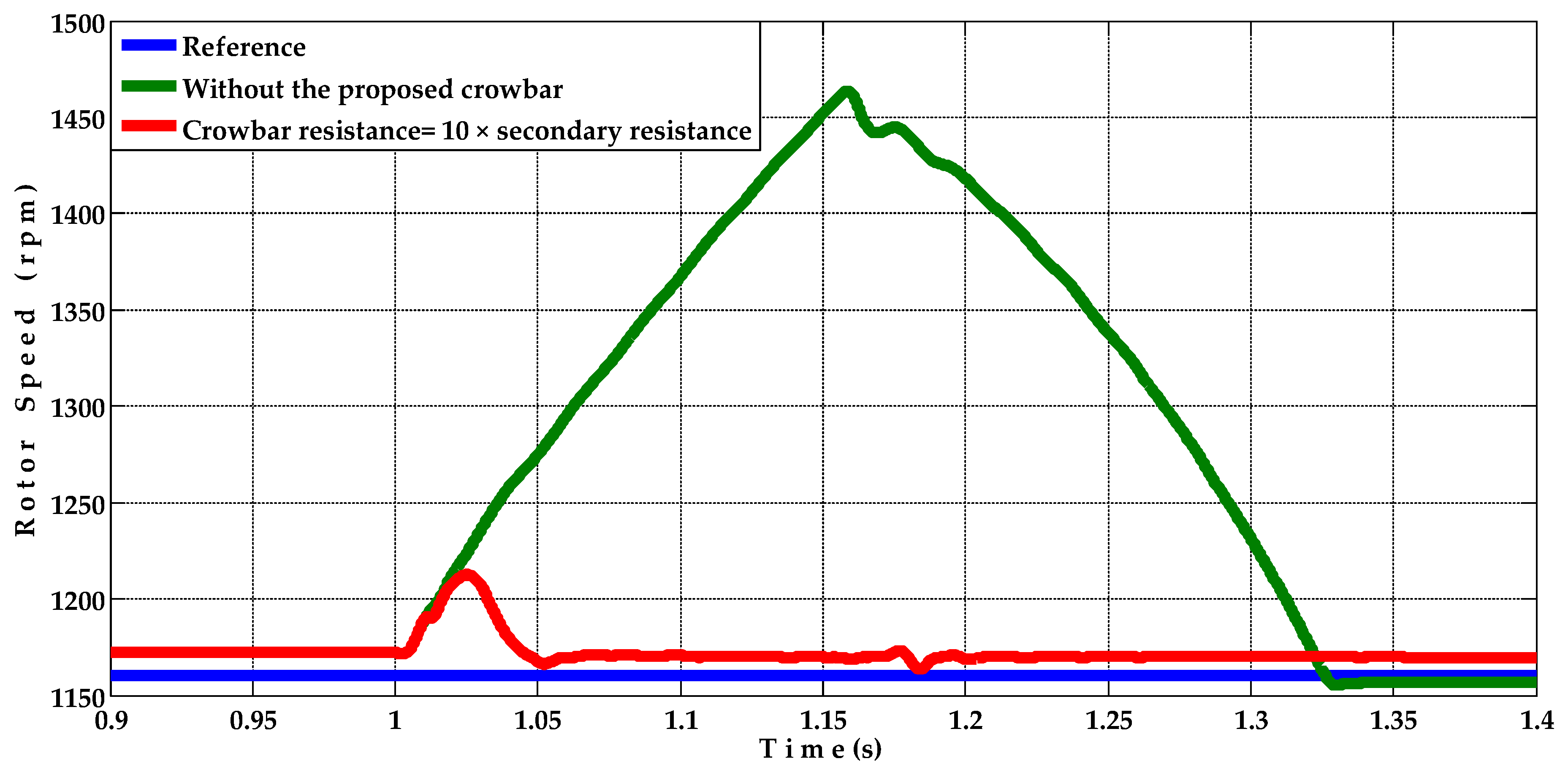
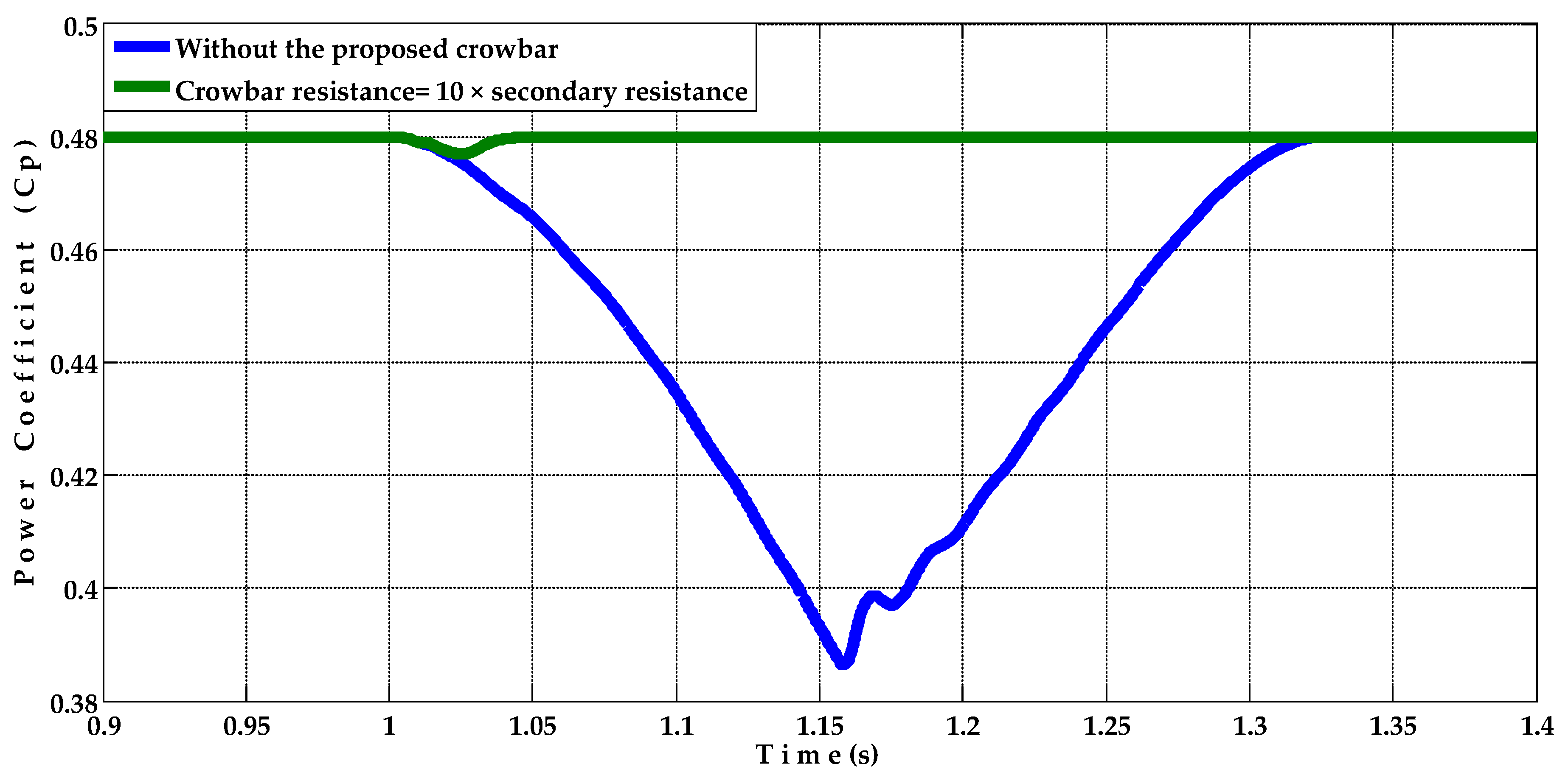
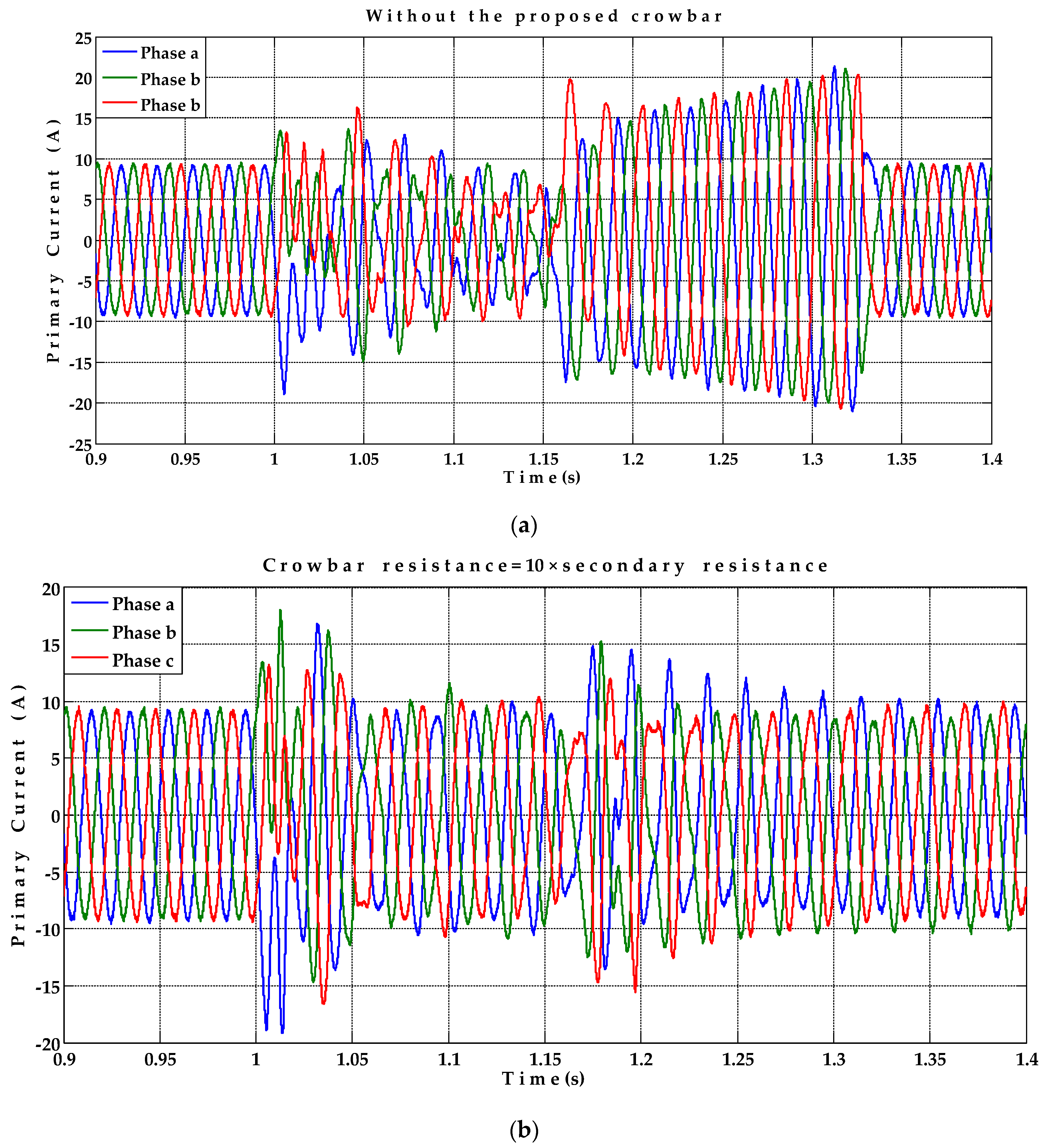
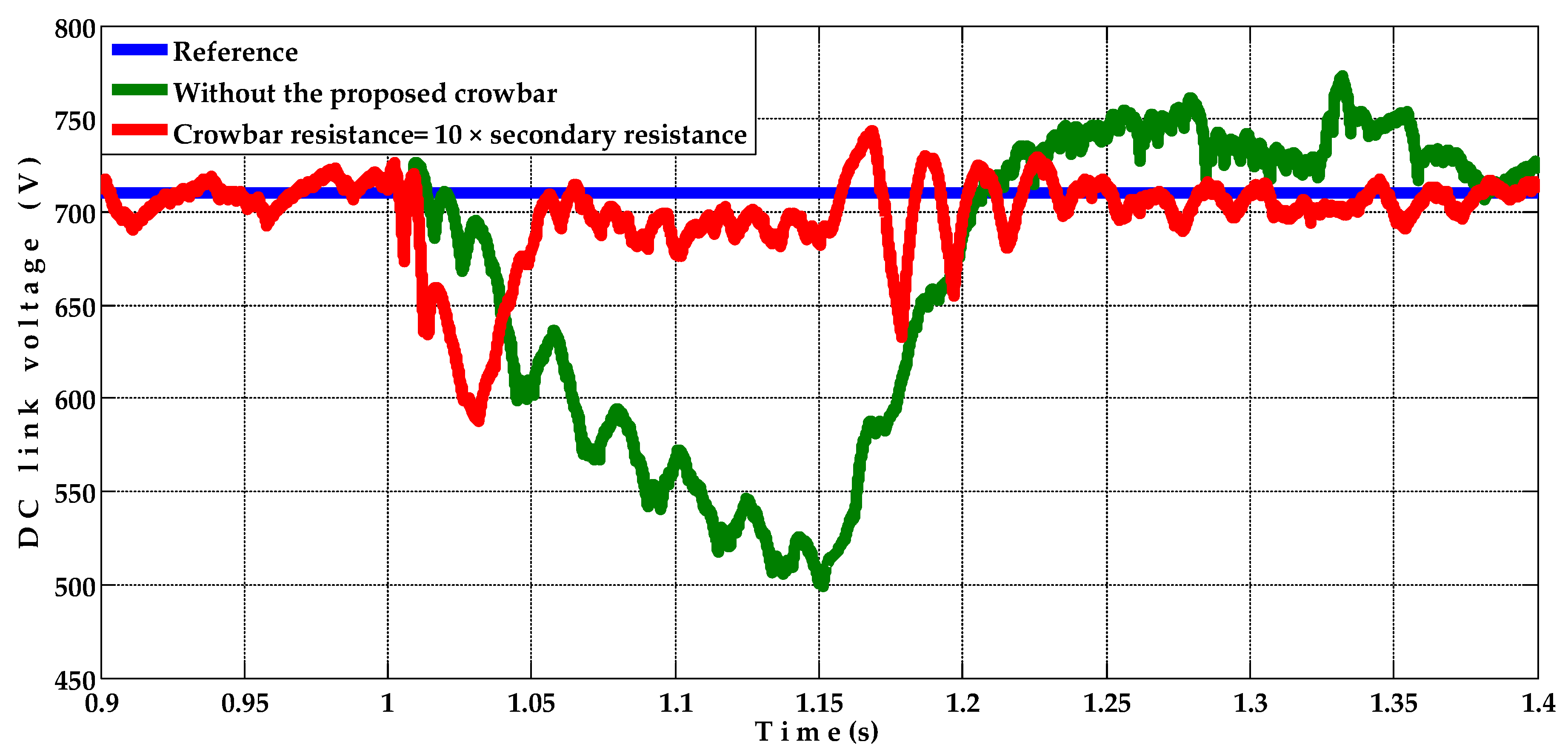
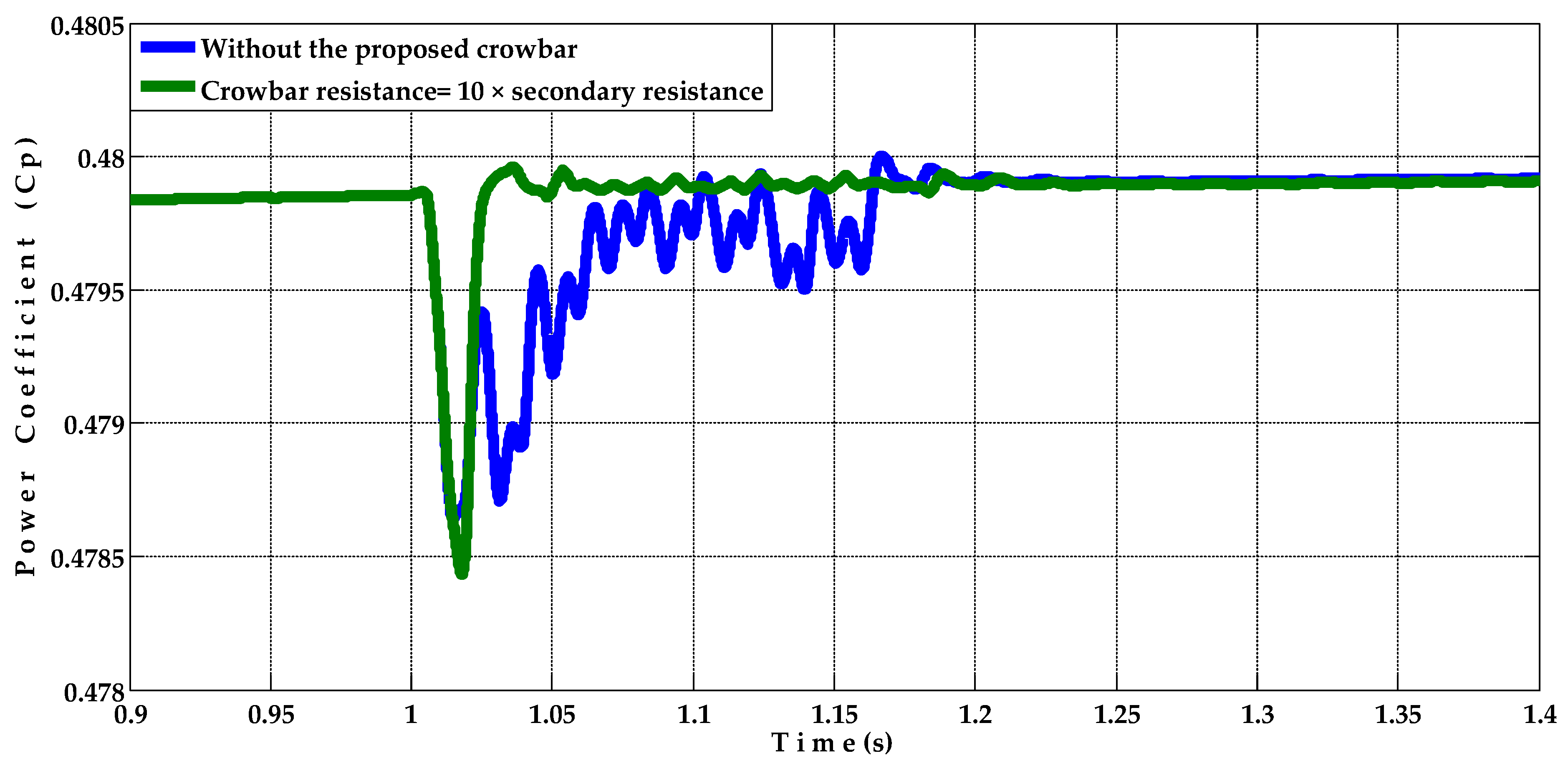
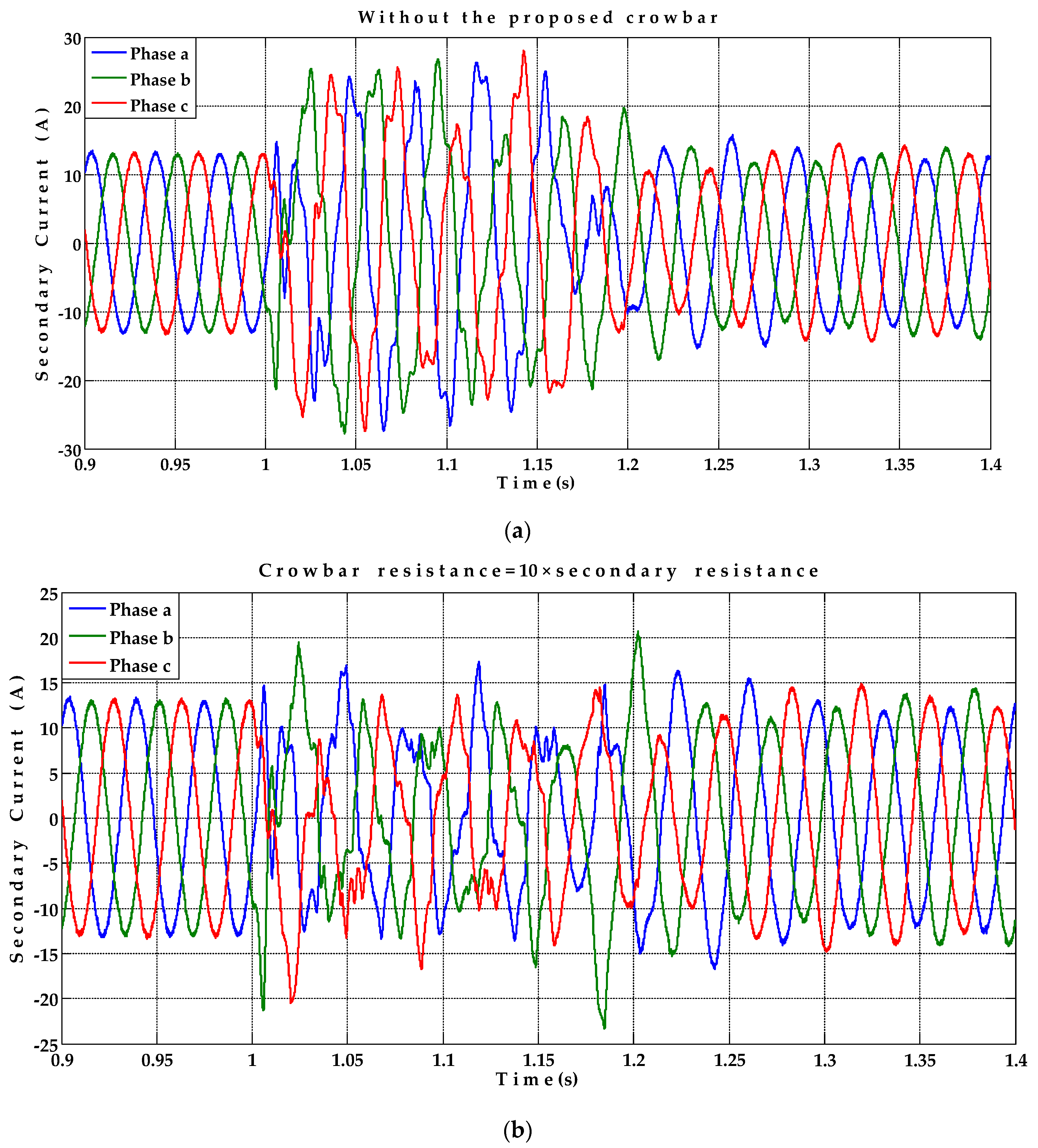
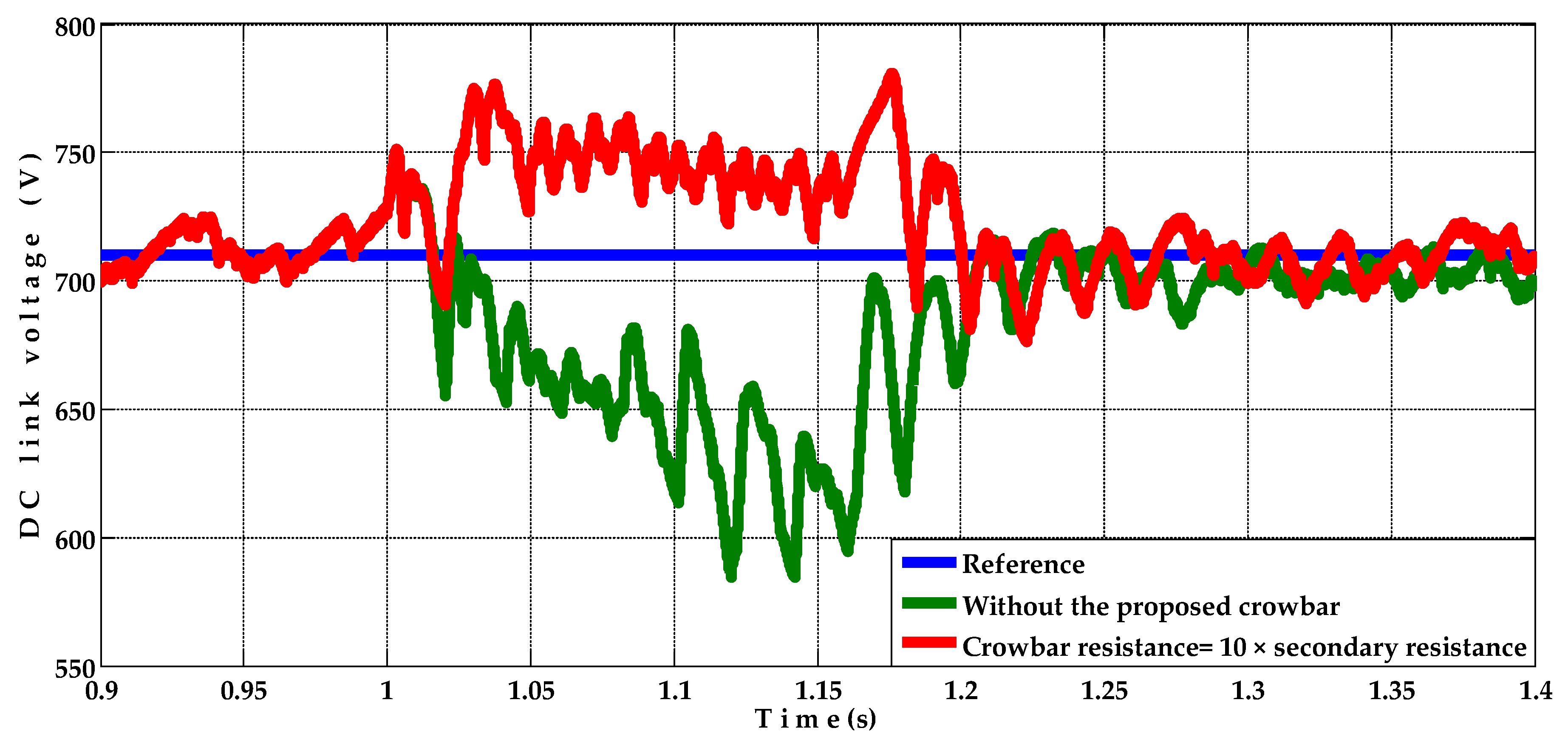
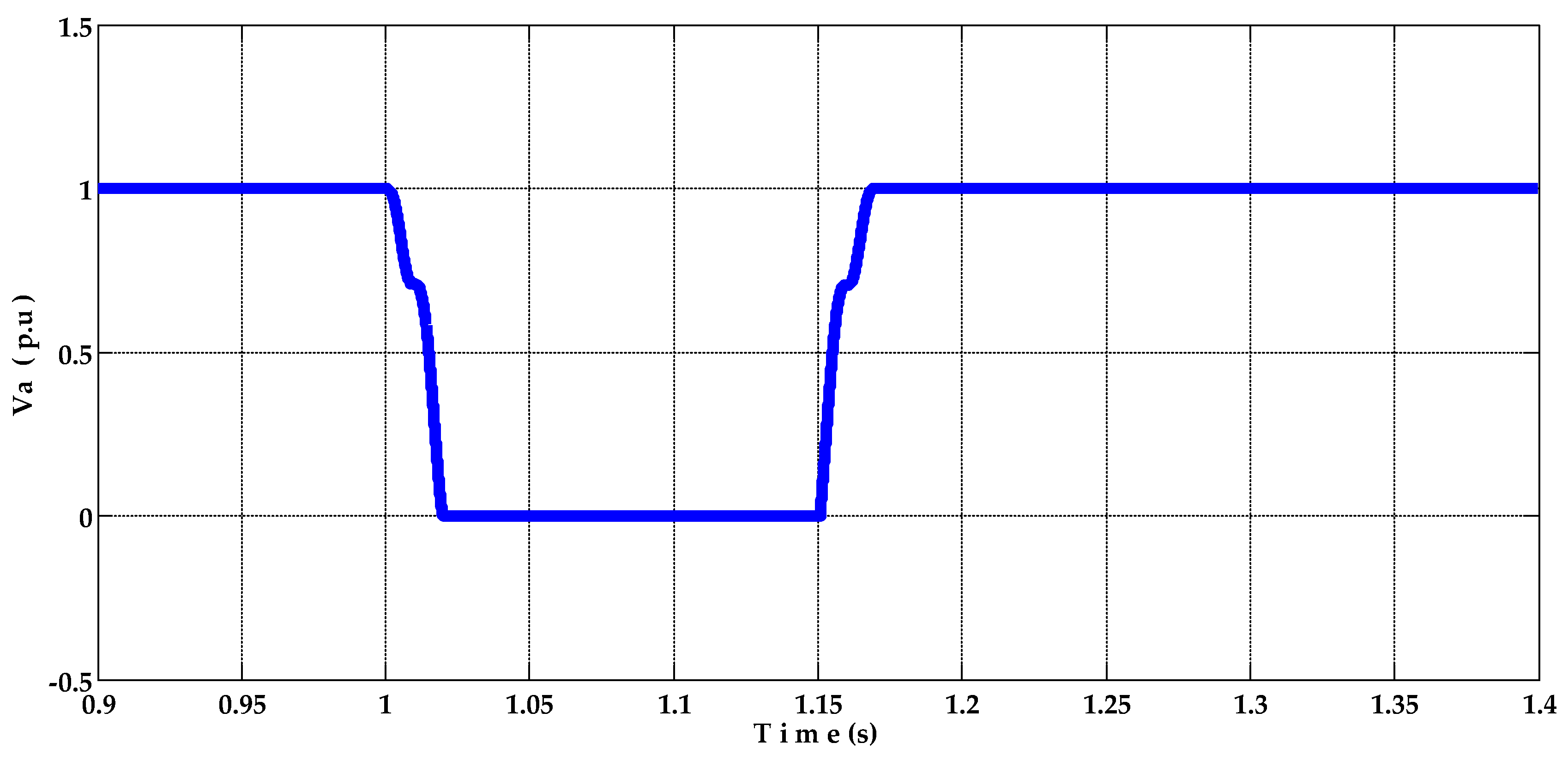
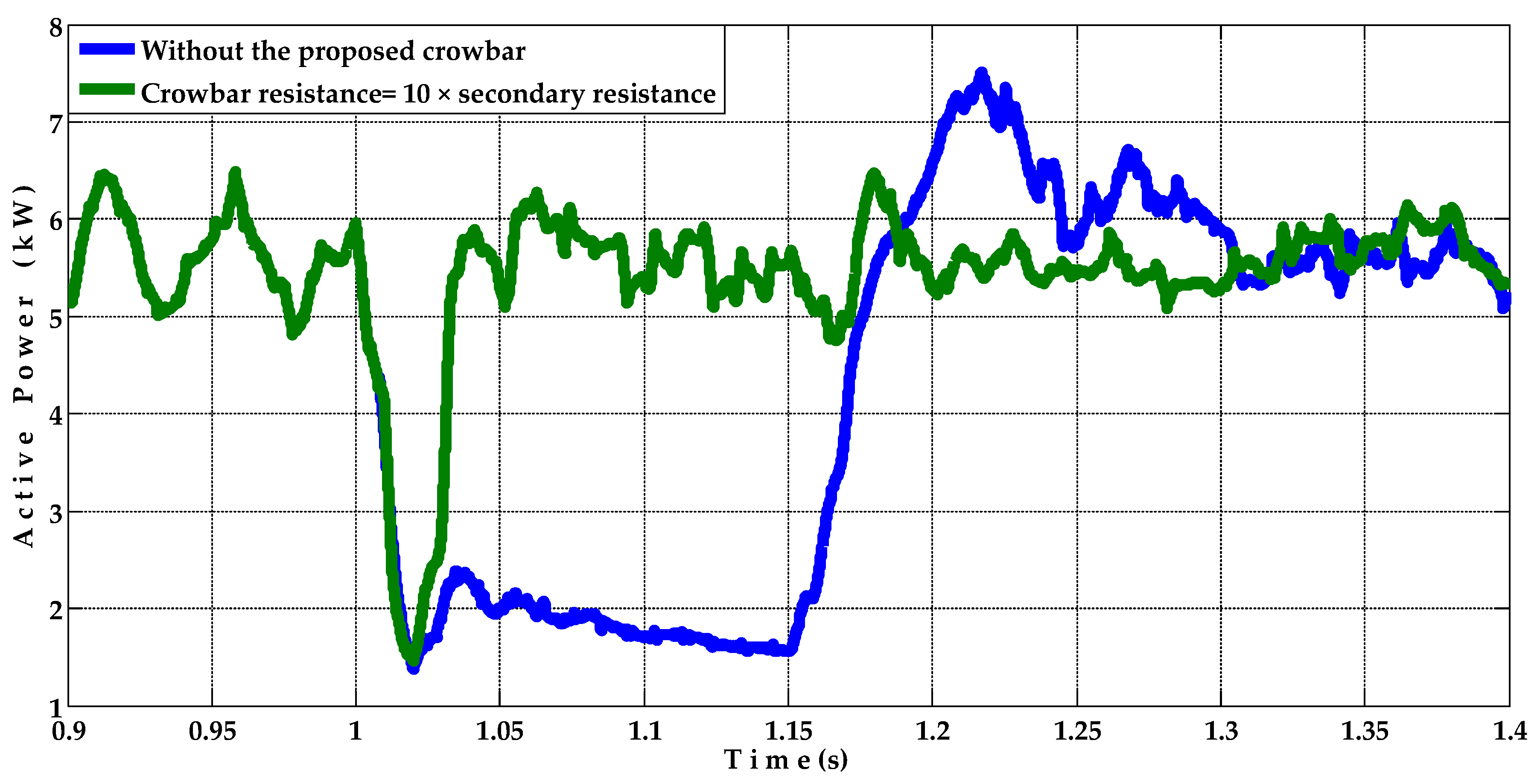
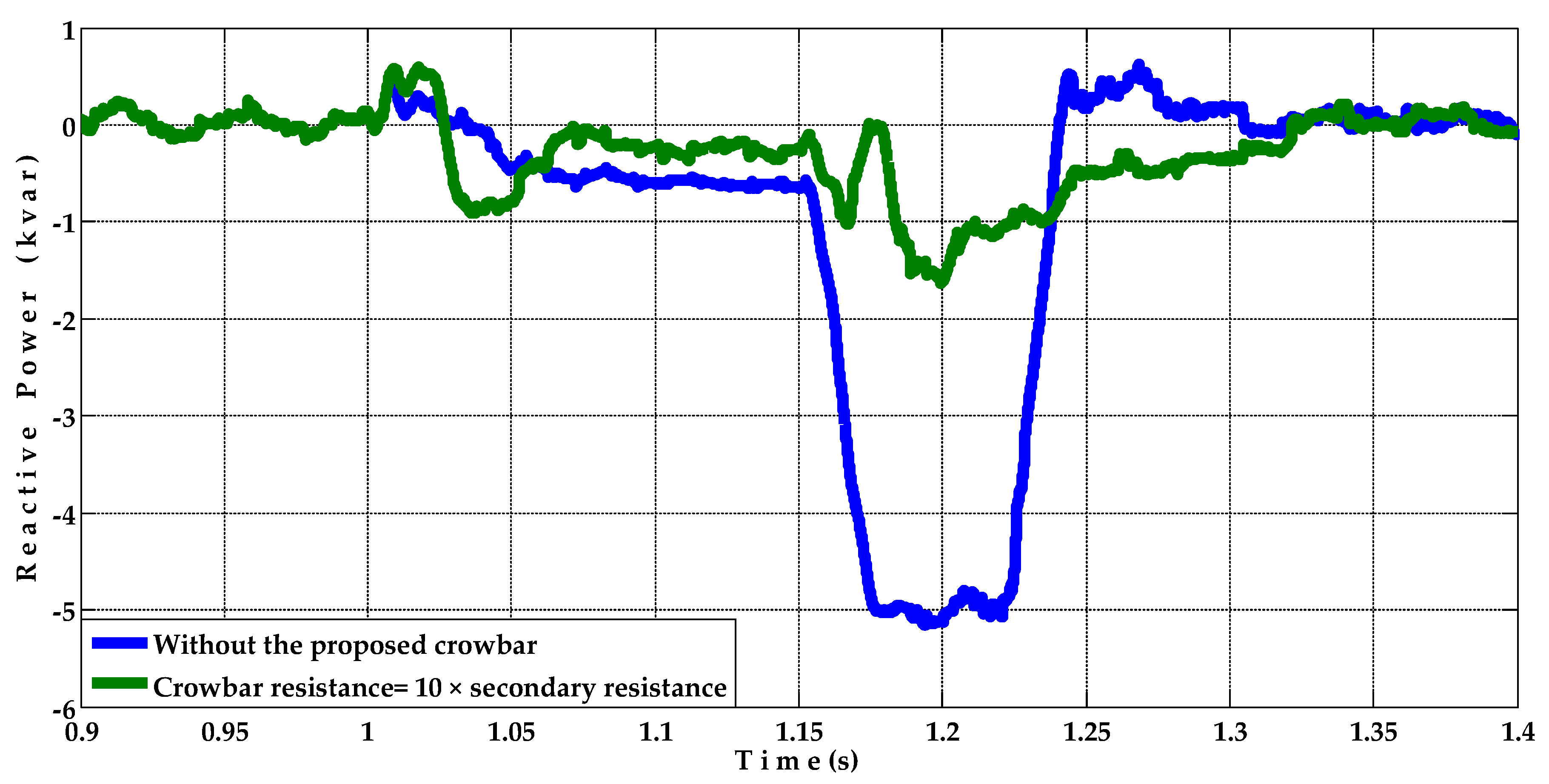
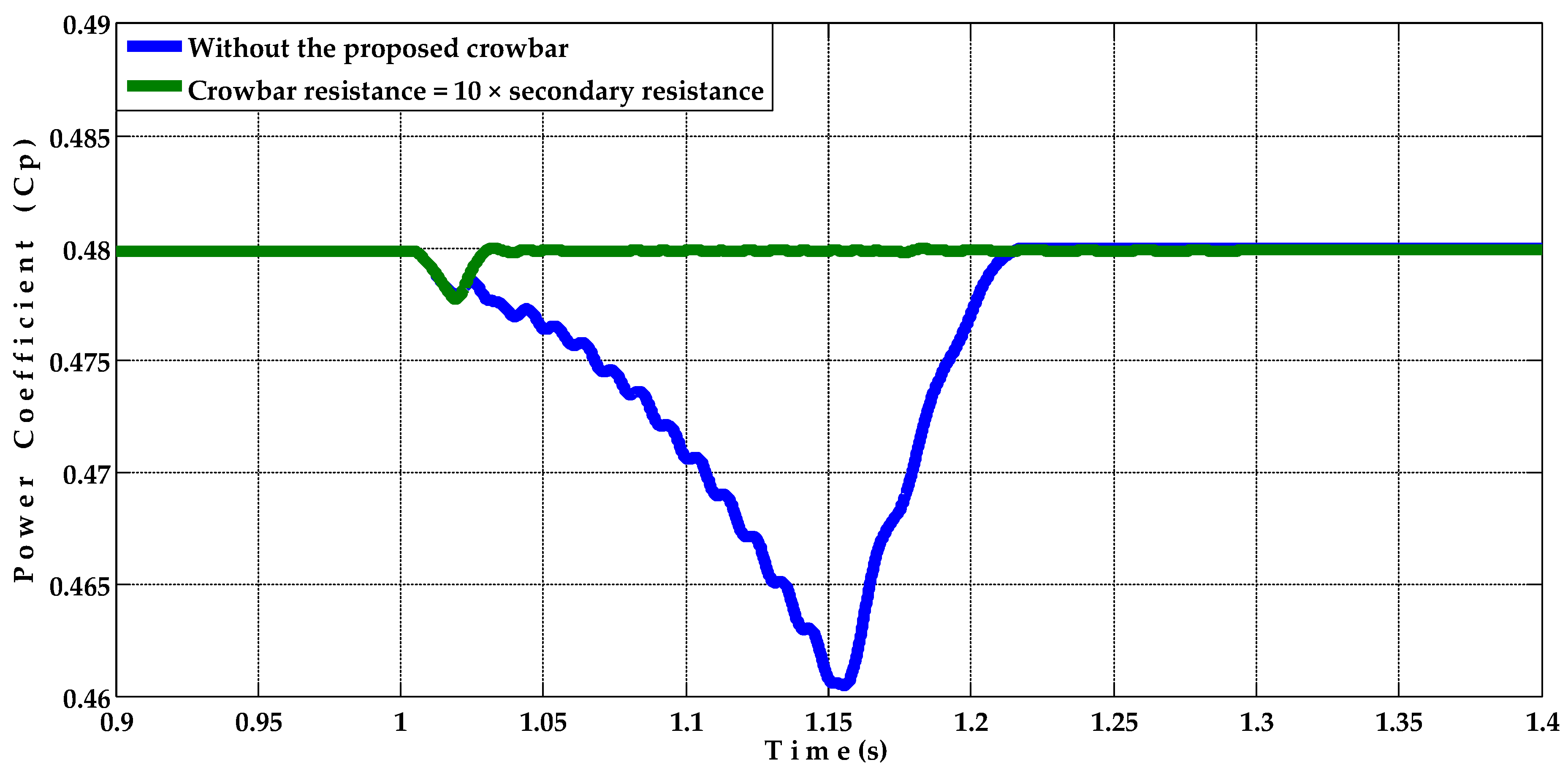
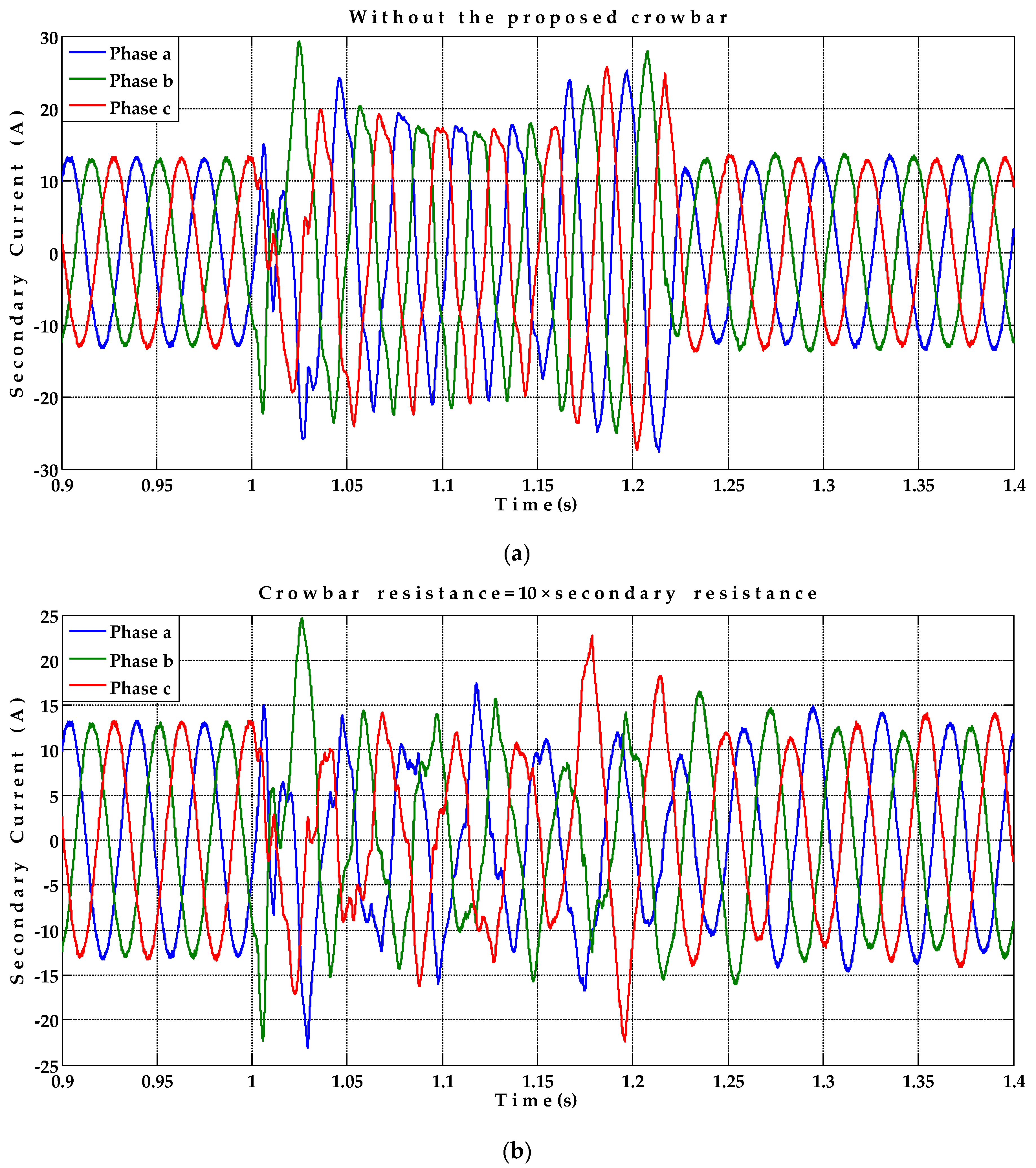
5.1. Symmetrical Fault (Three Line to Ground Fault)
5.2. Unsymmetrical Fault
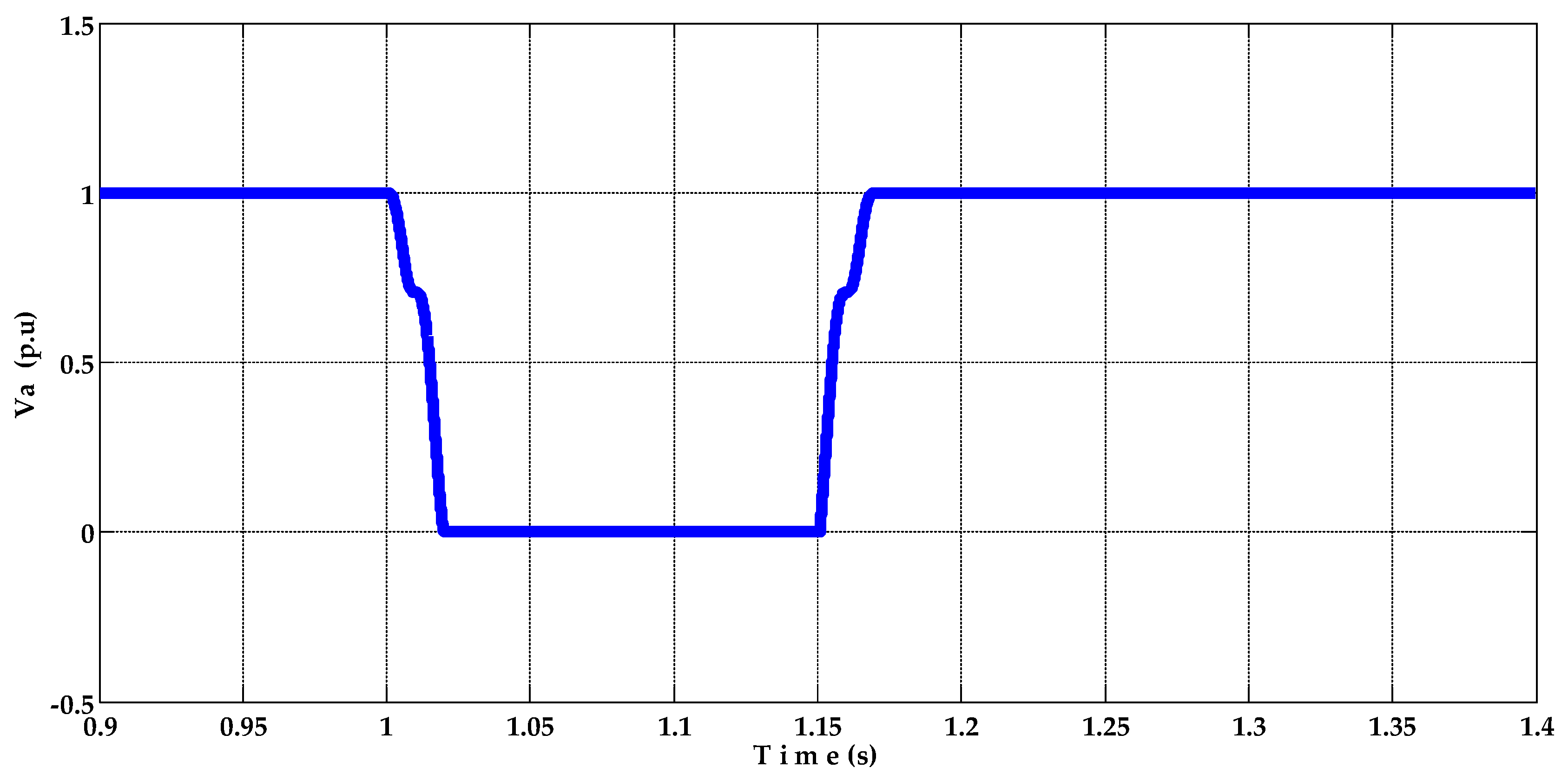
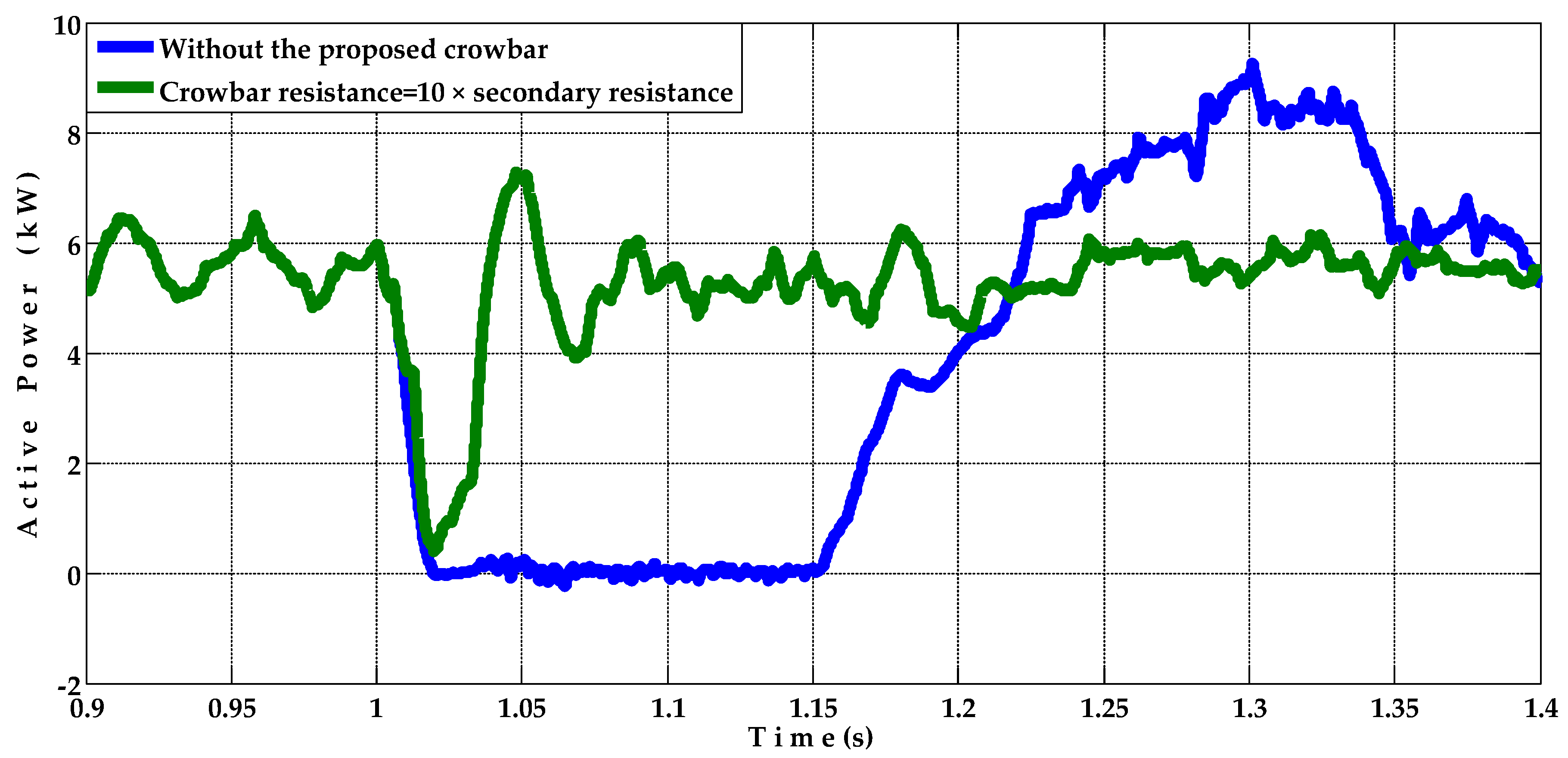
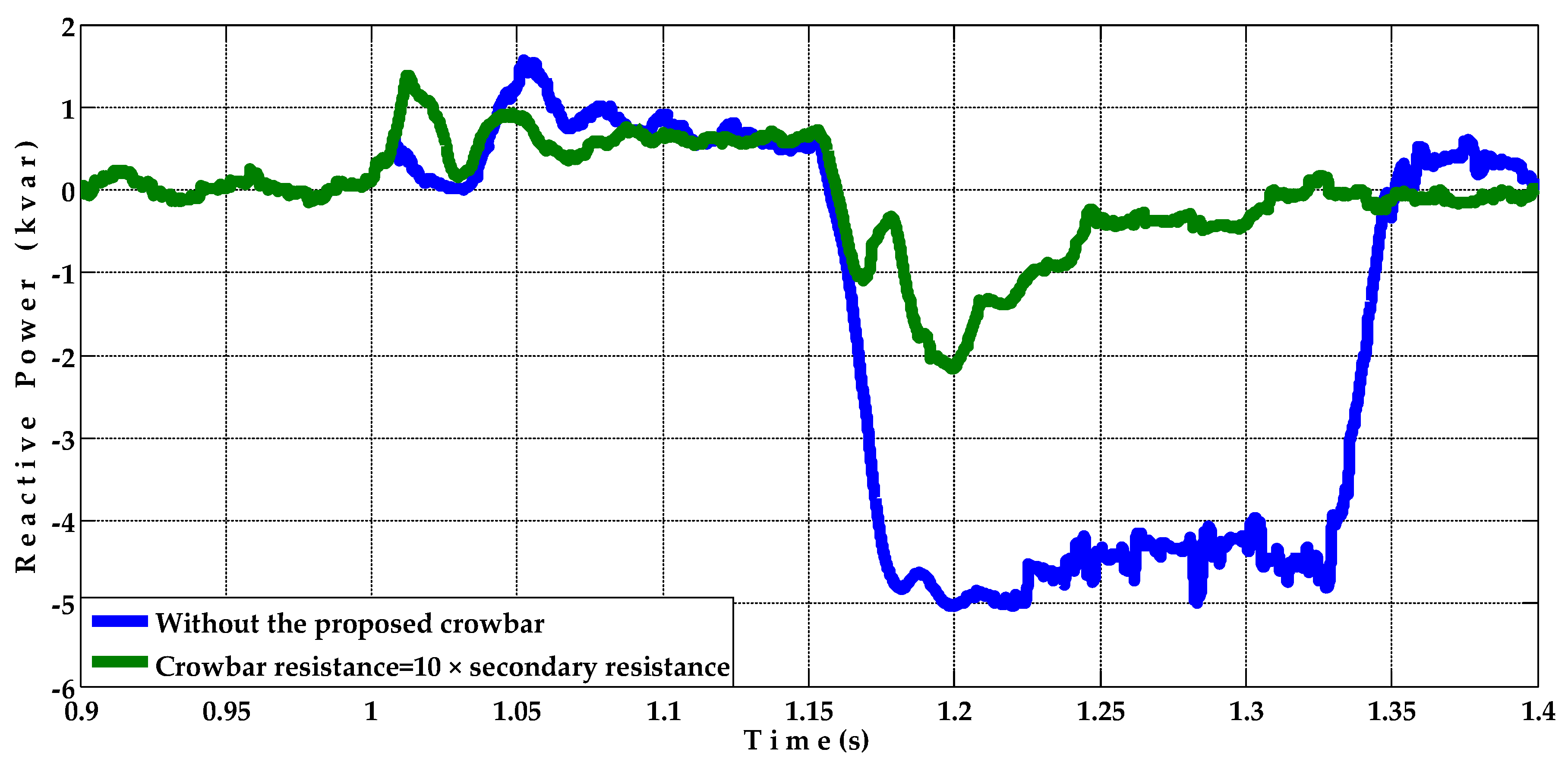
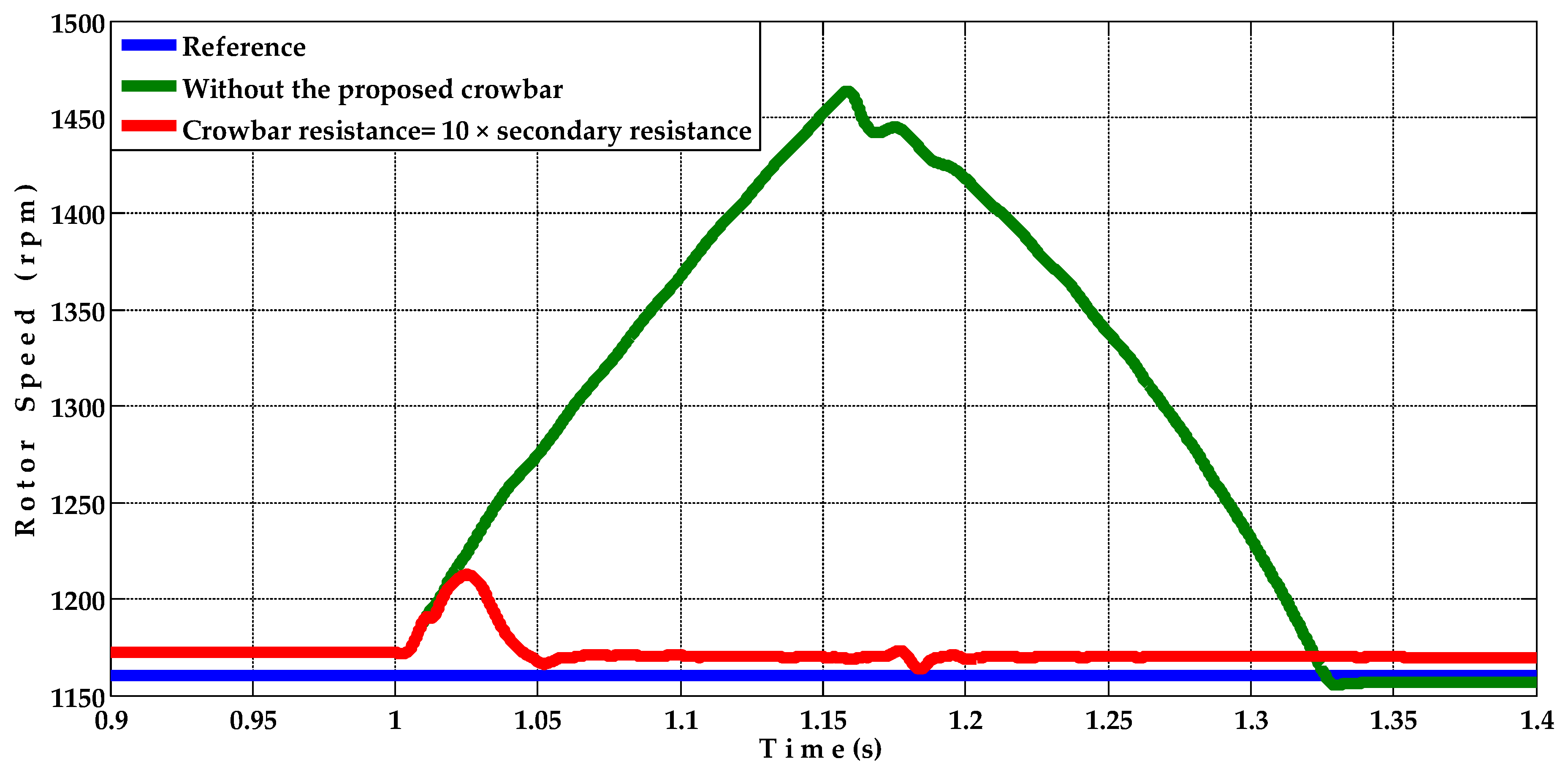
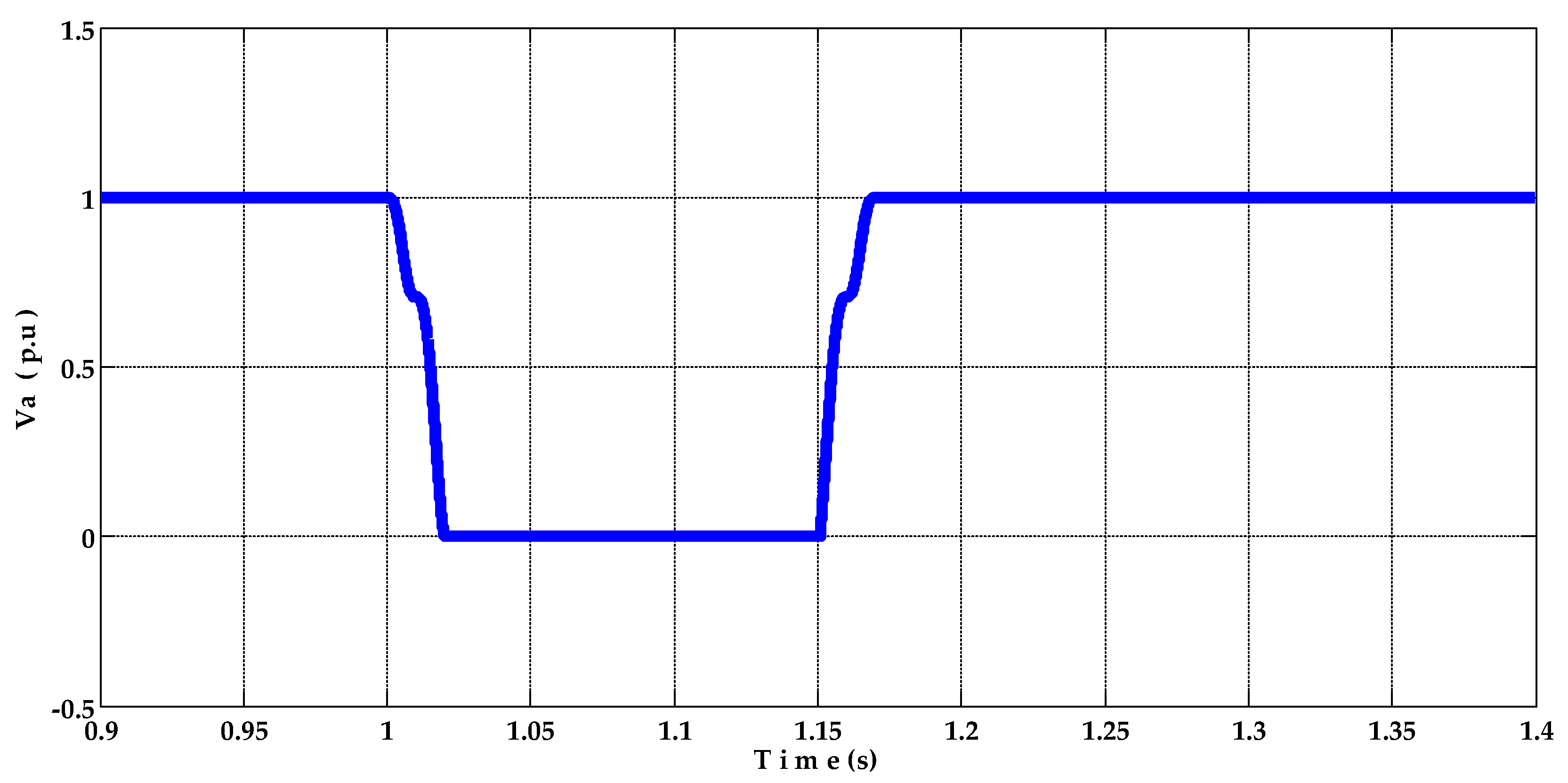
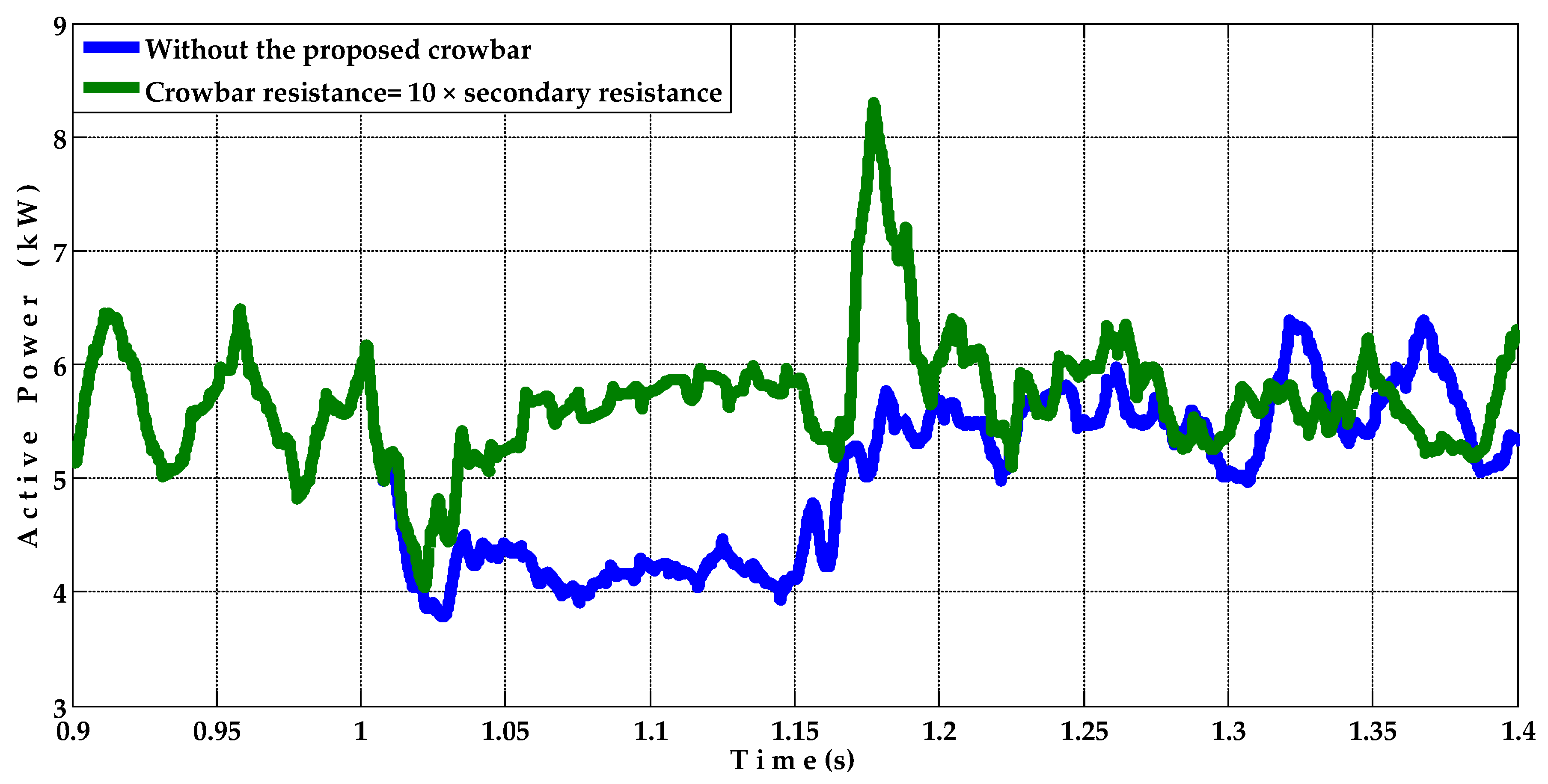
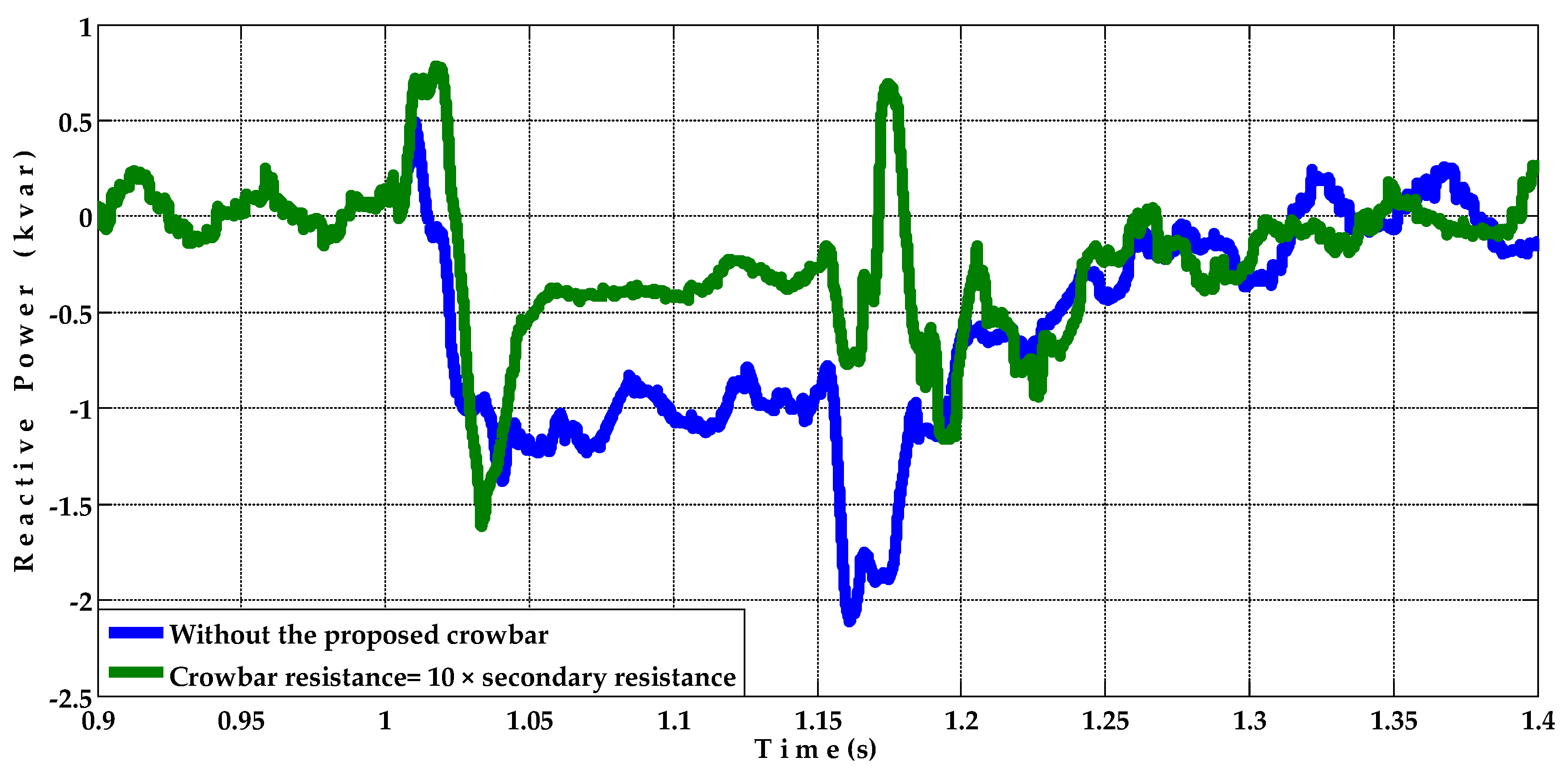
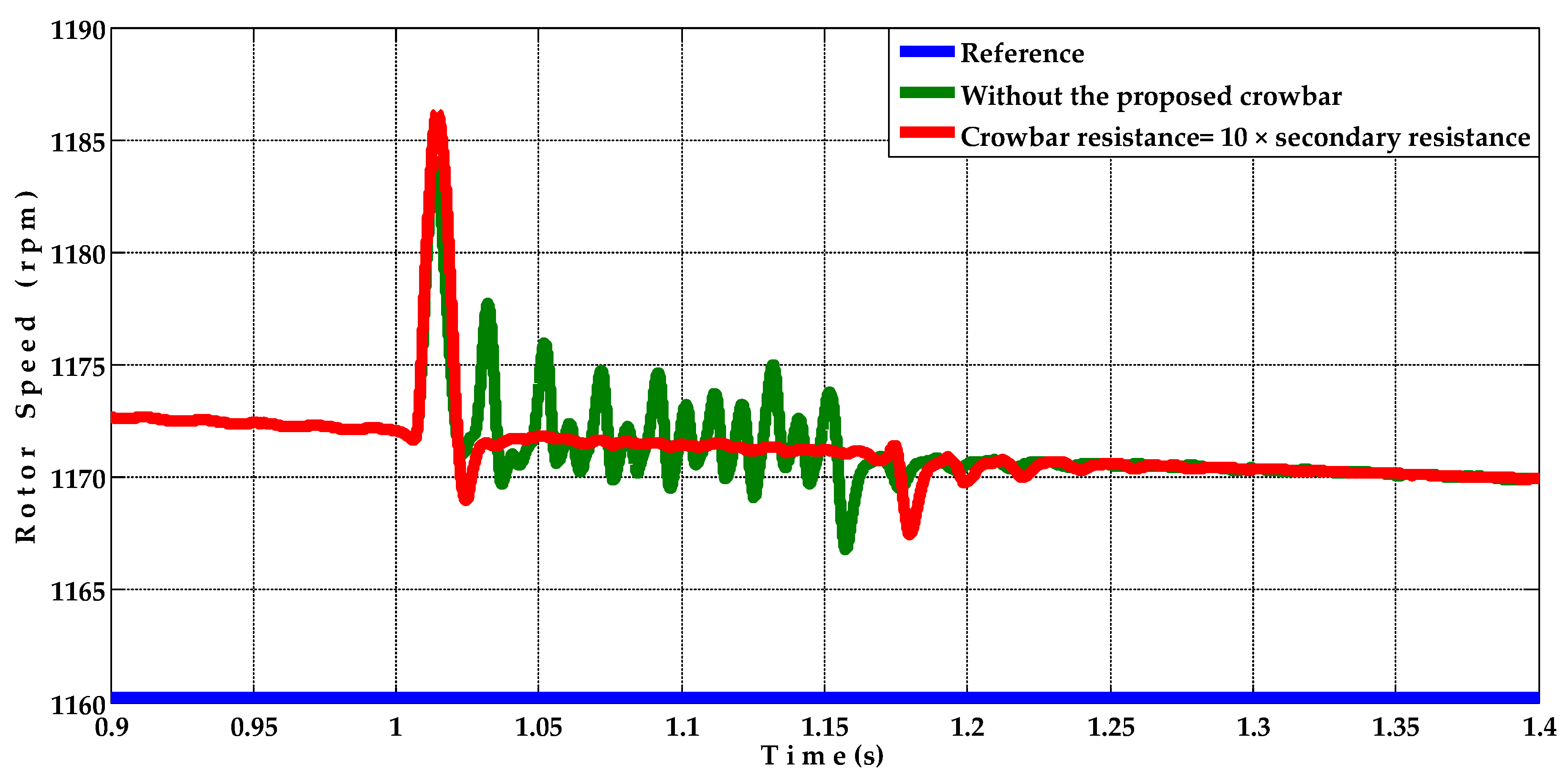
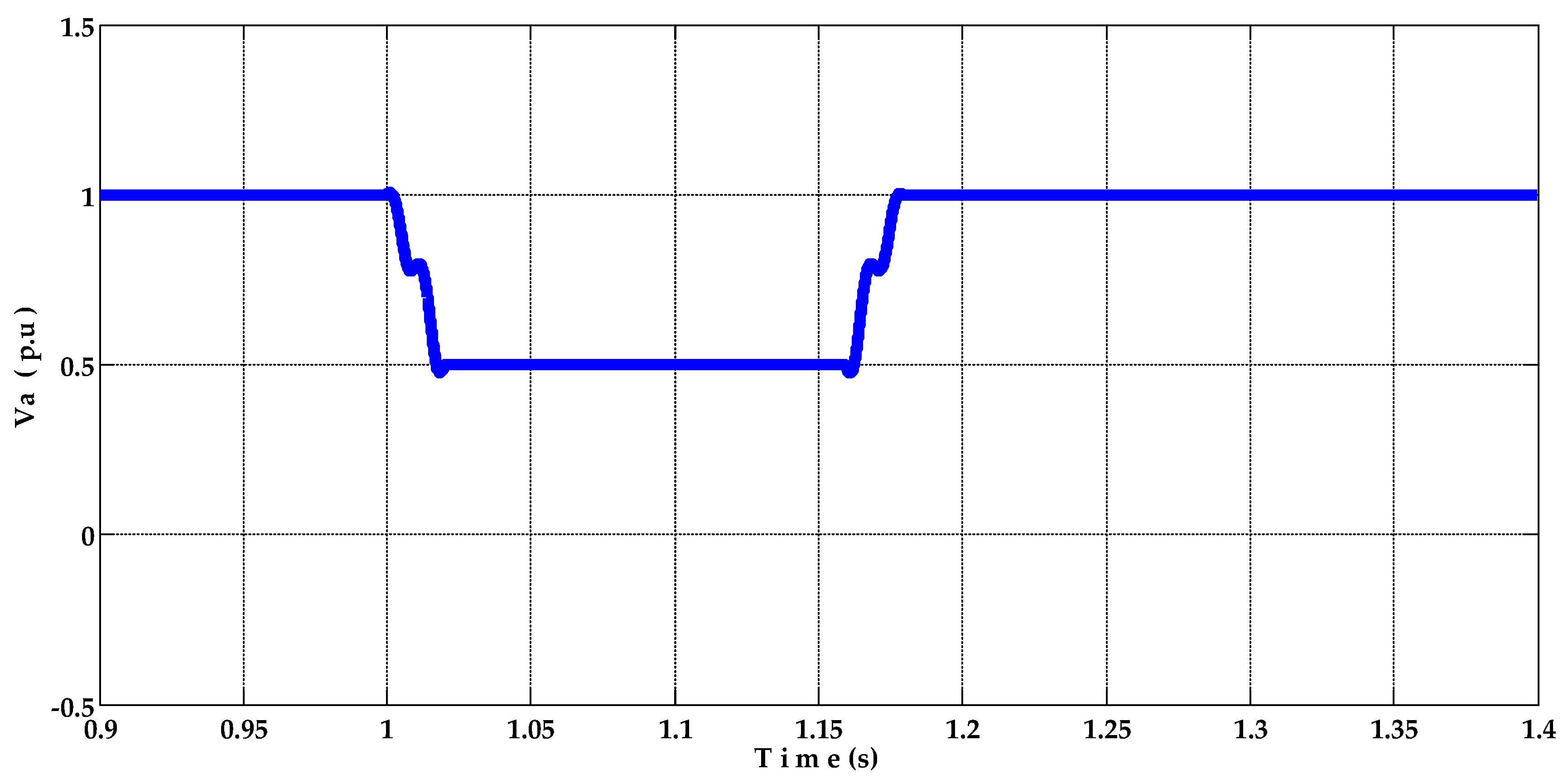
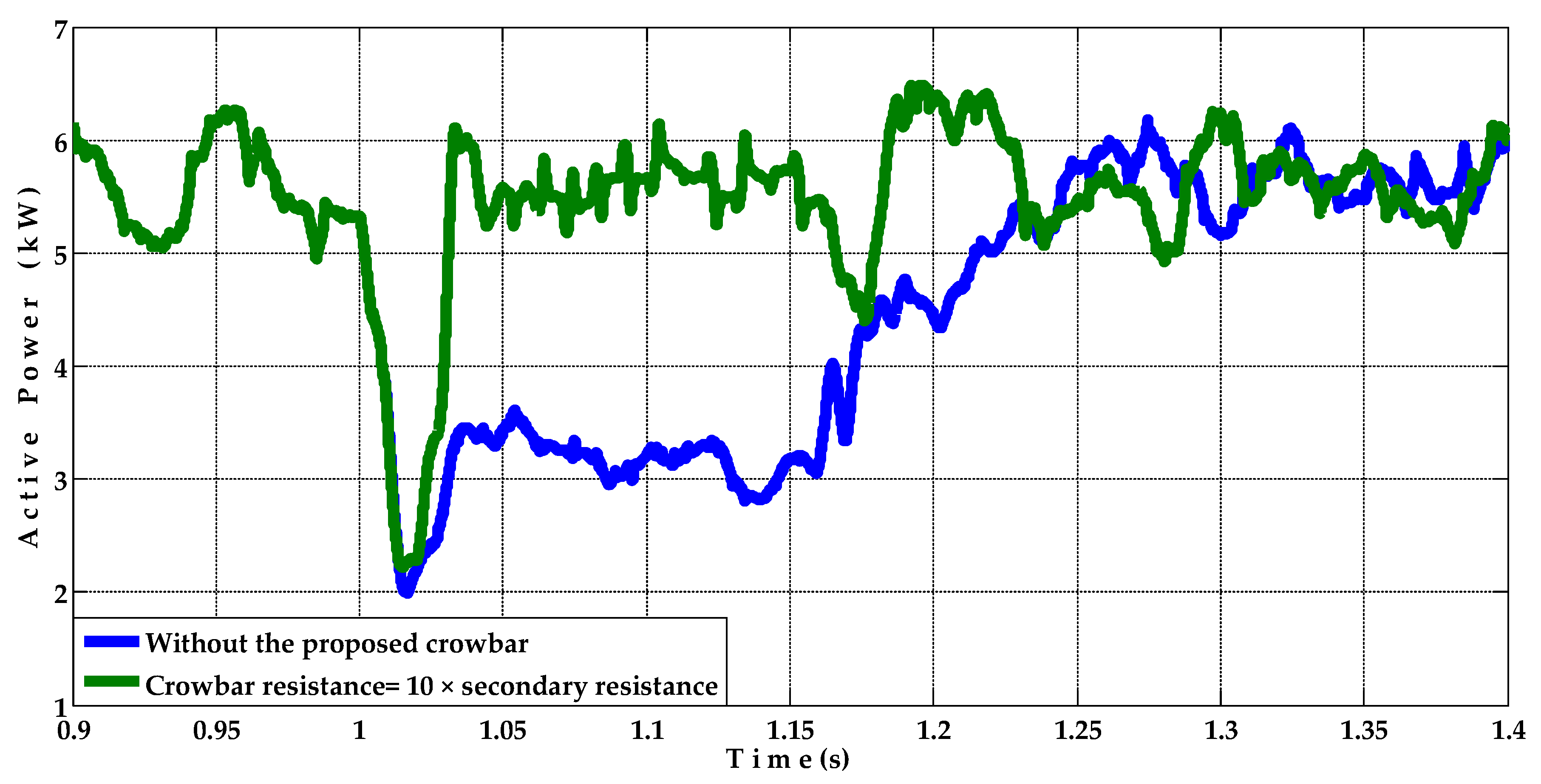
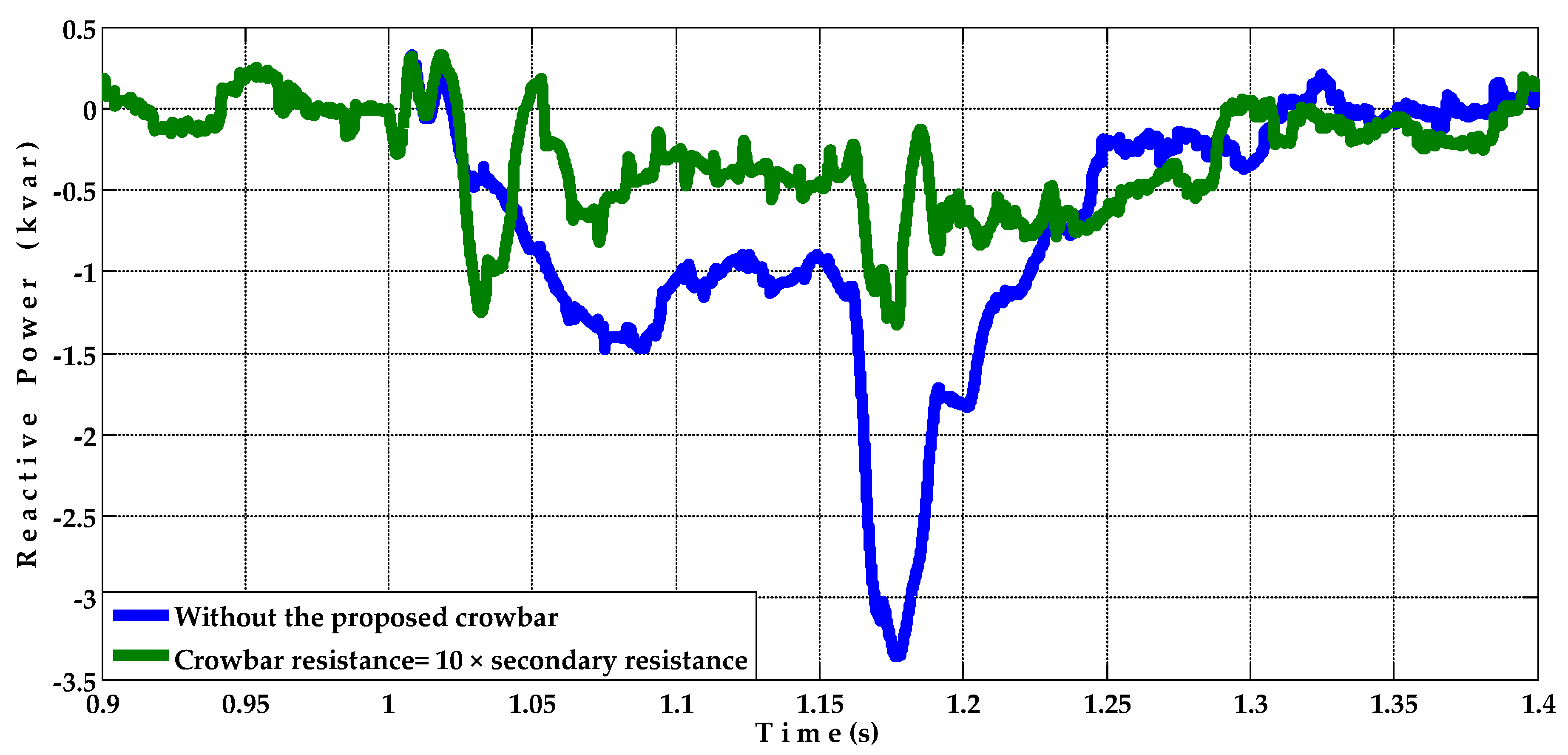
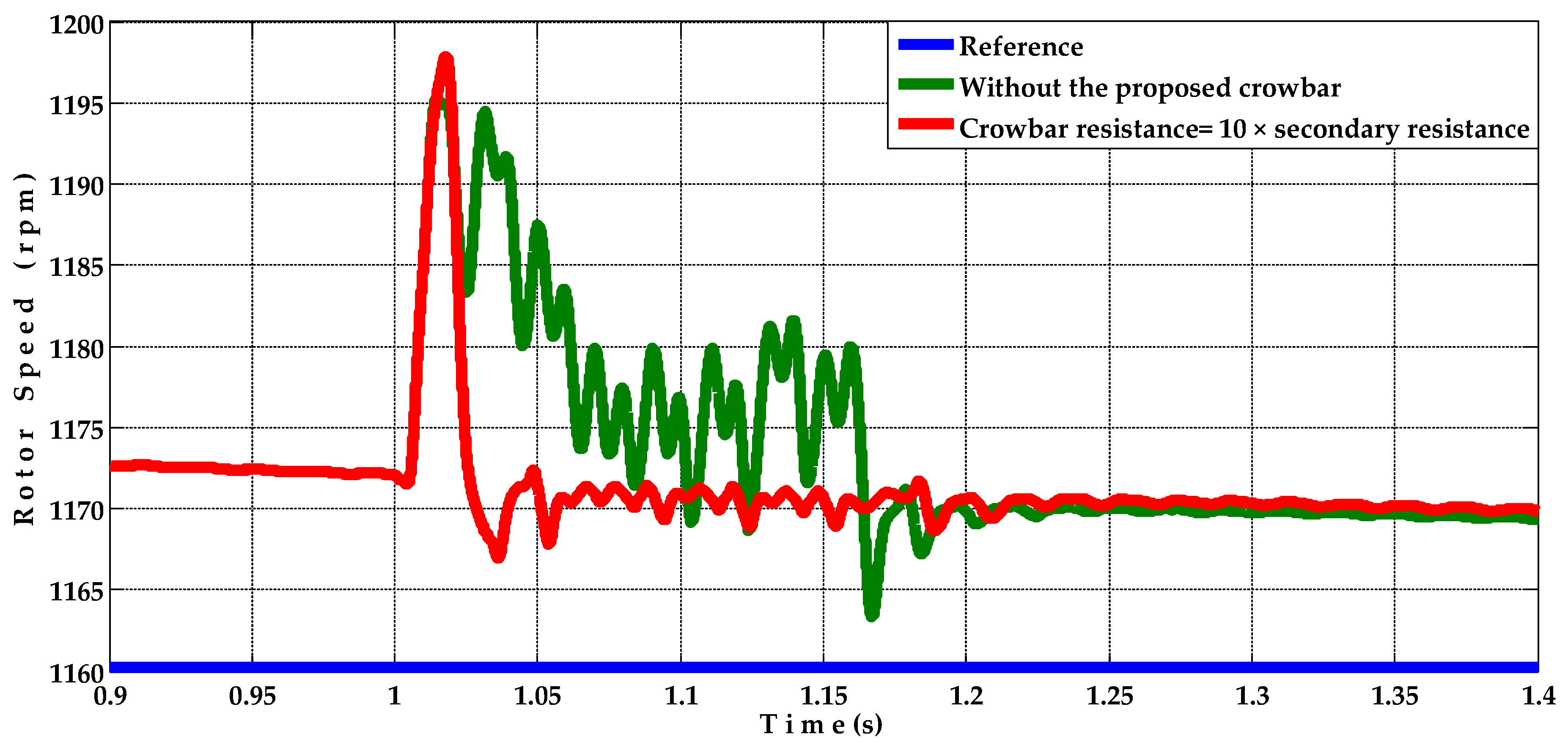
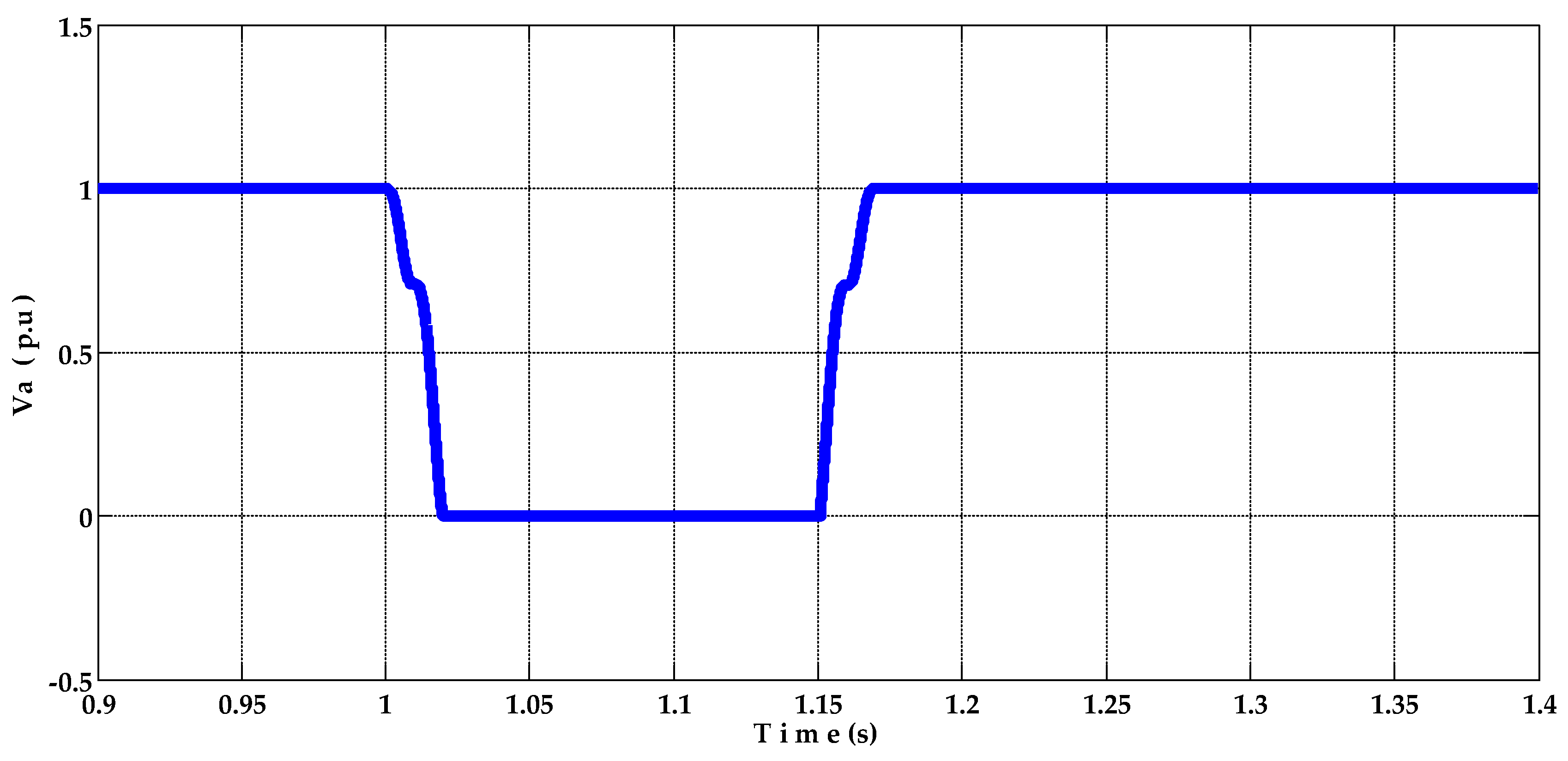
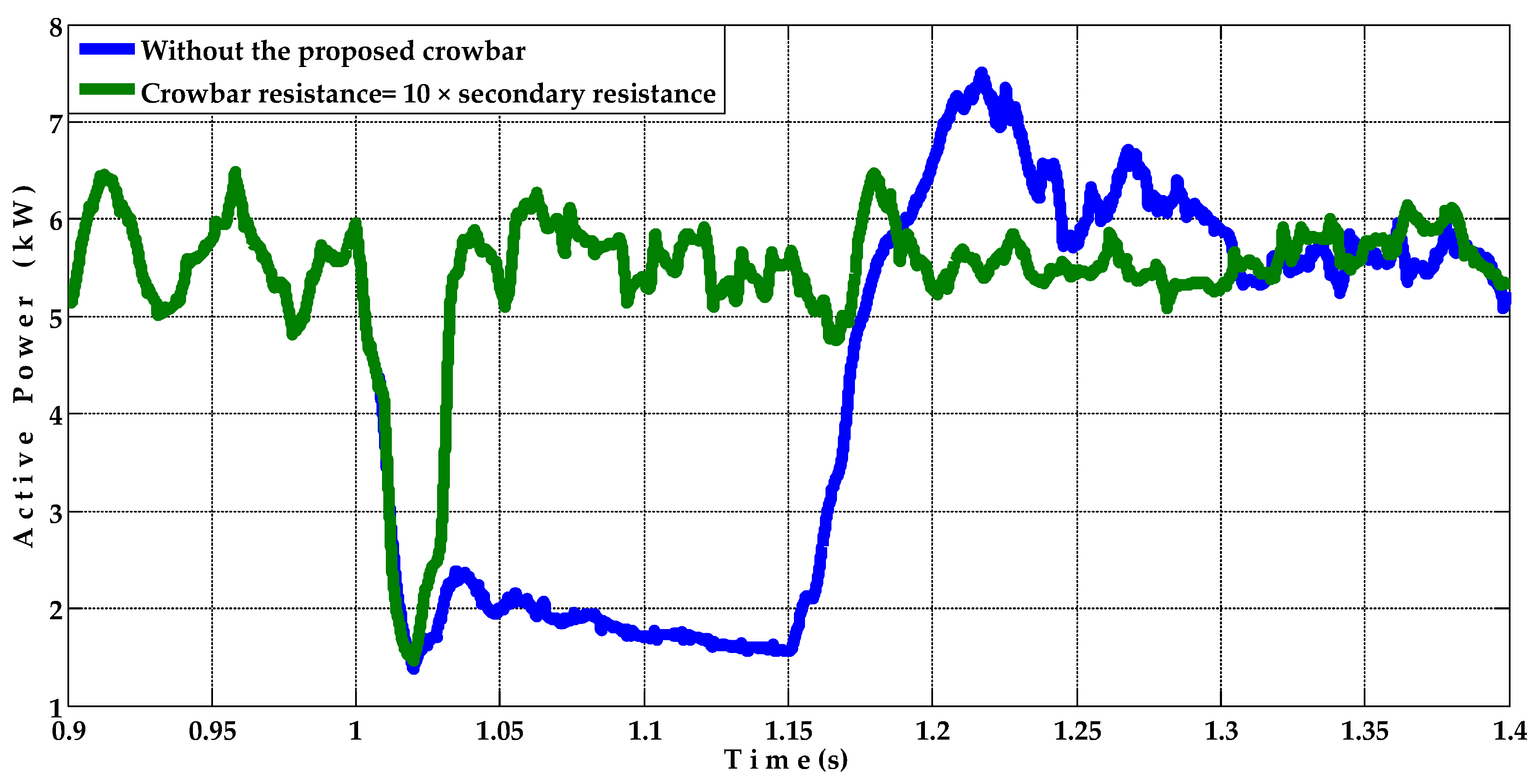
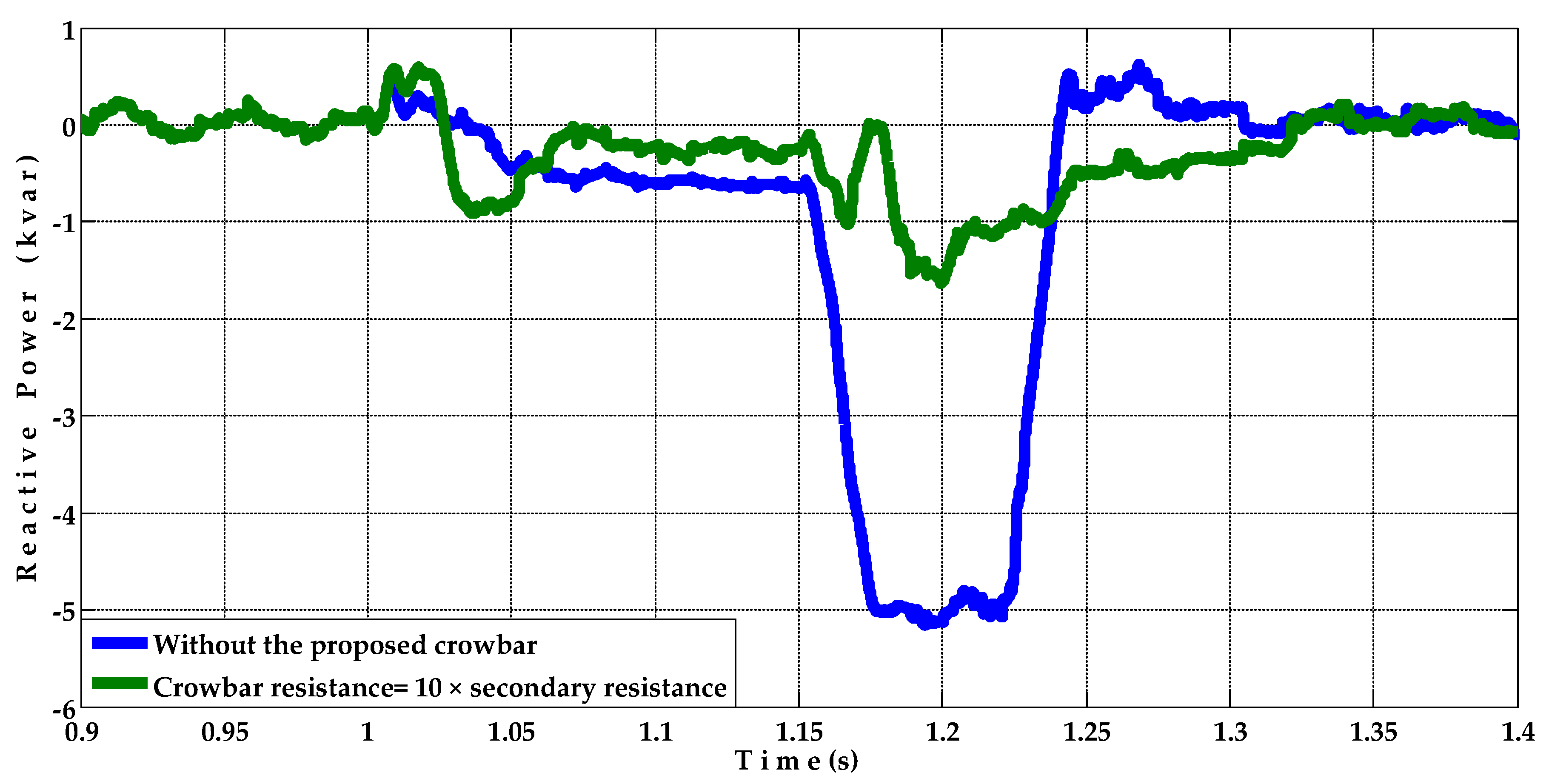
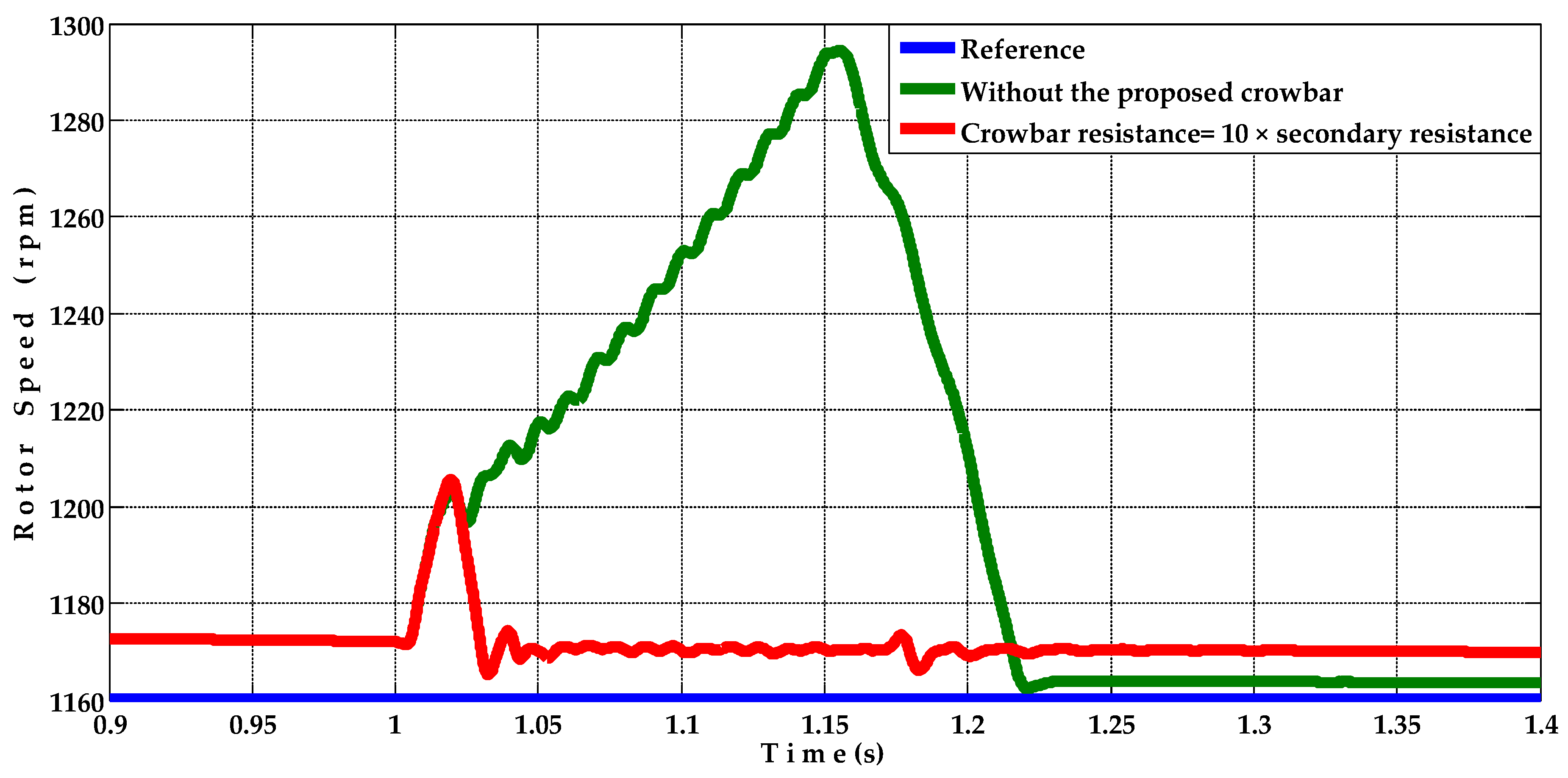
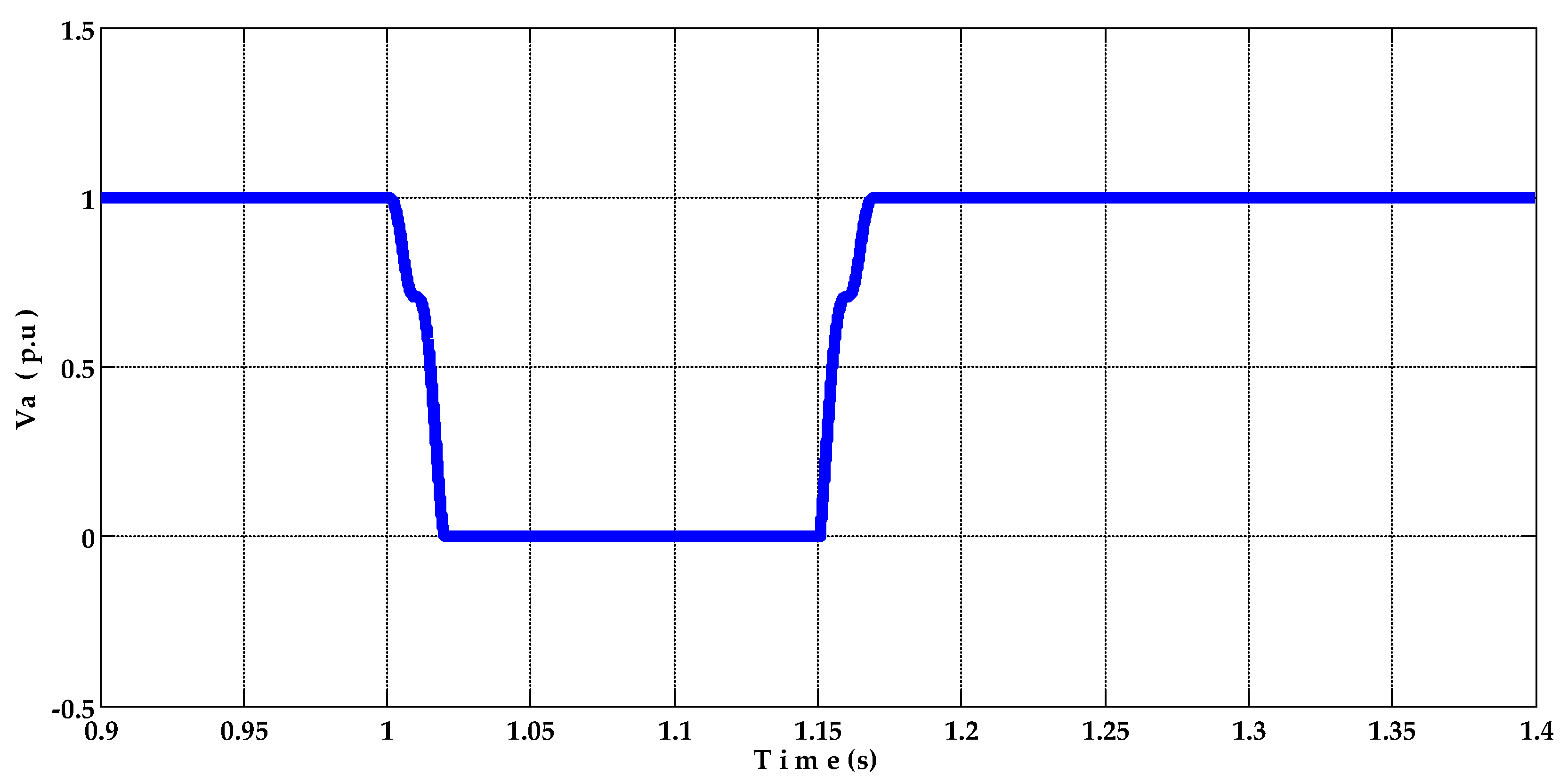
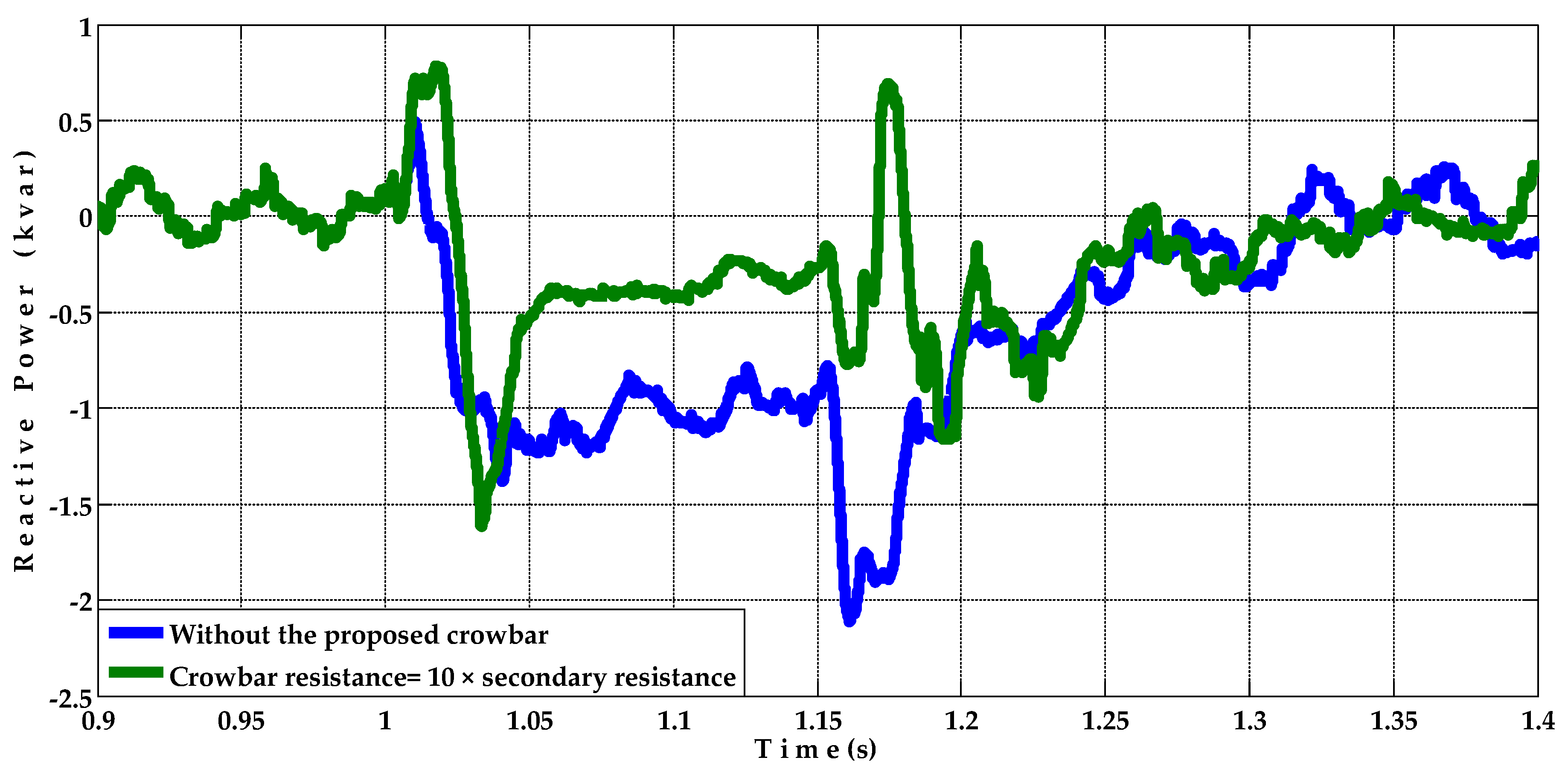
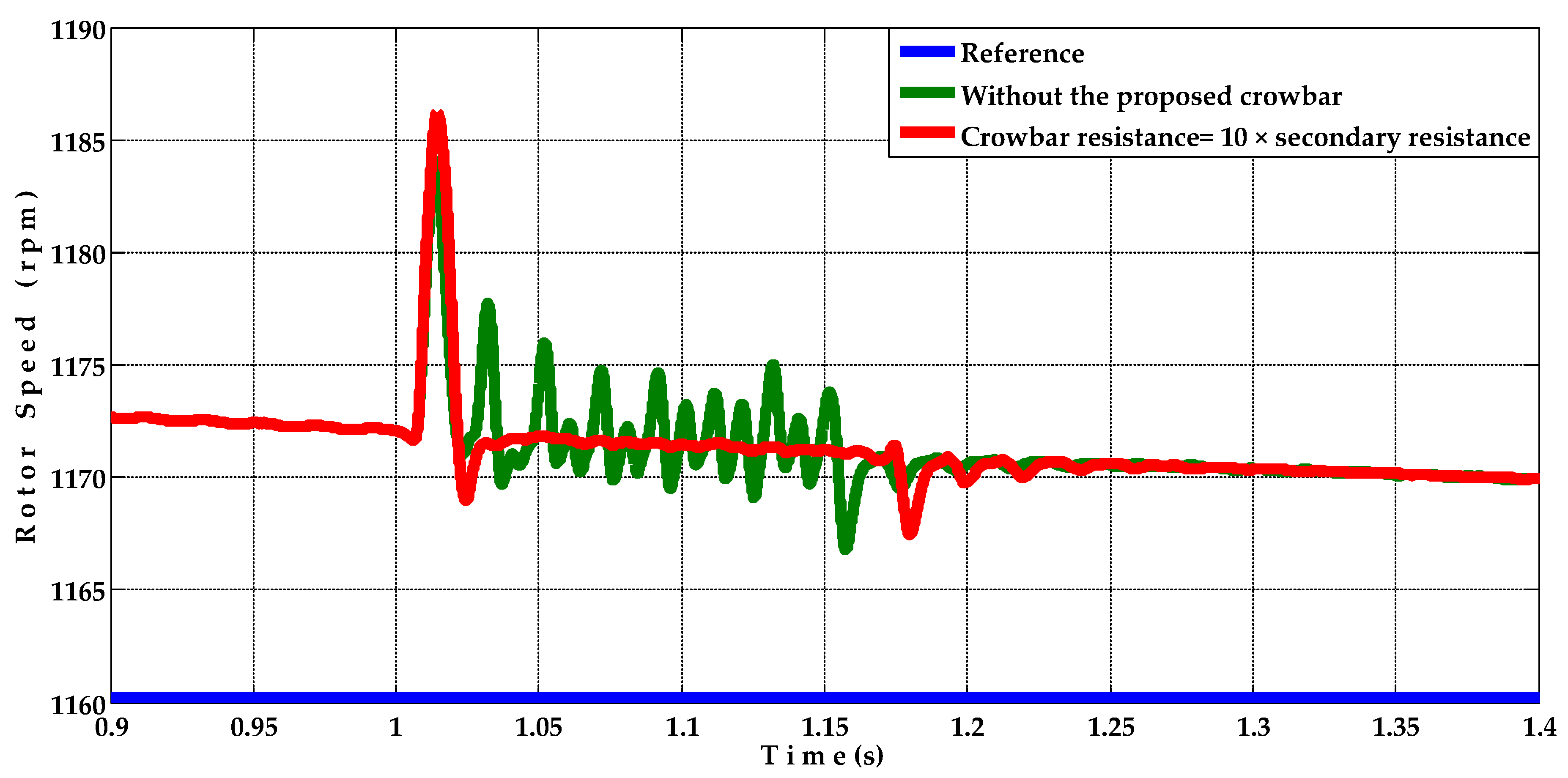
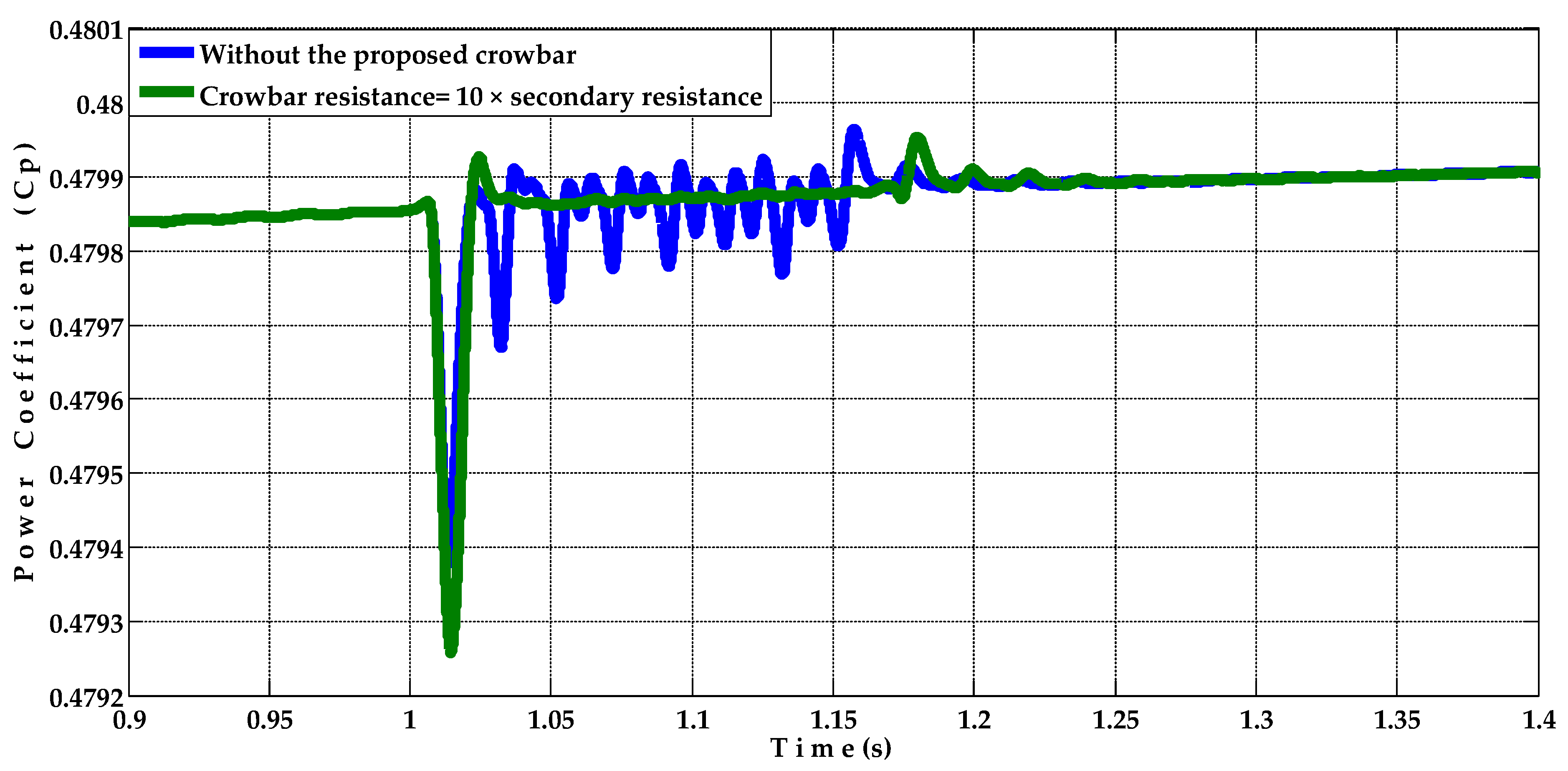
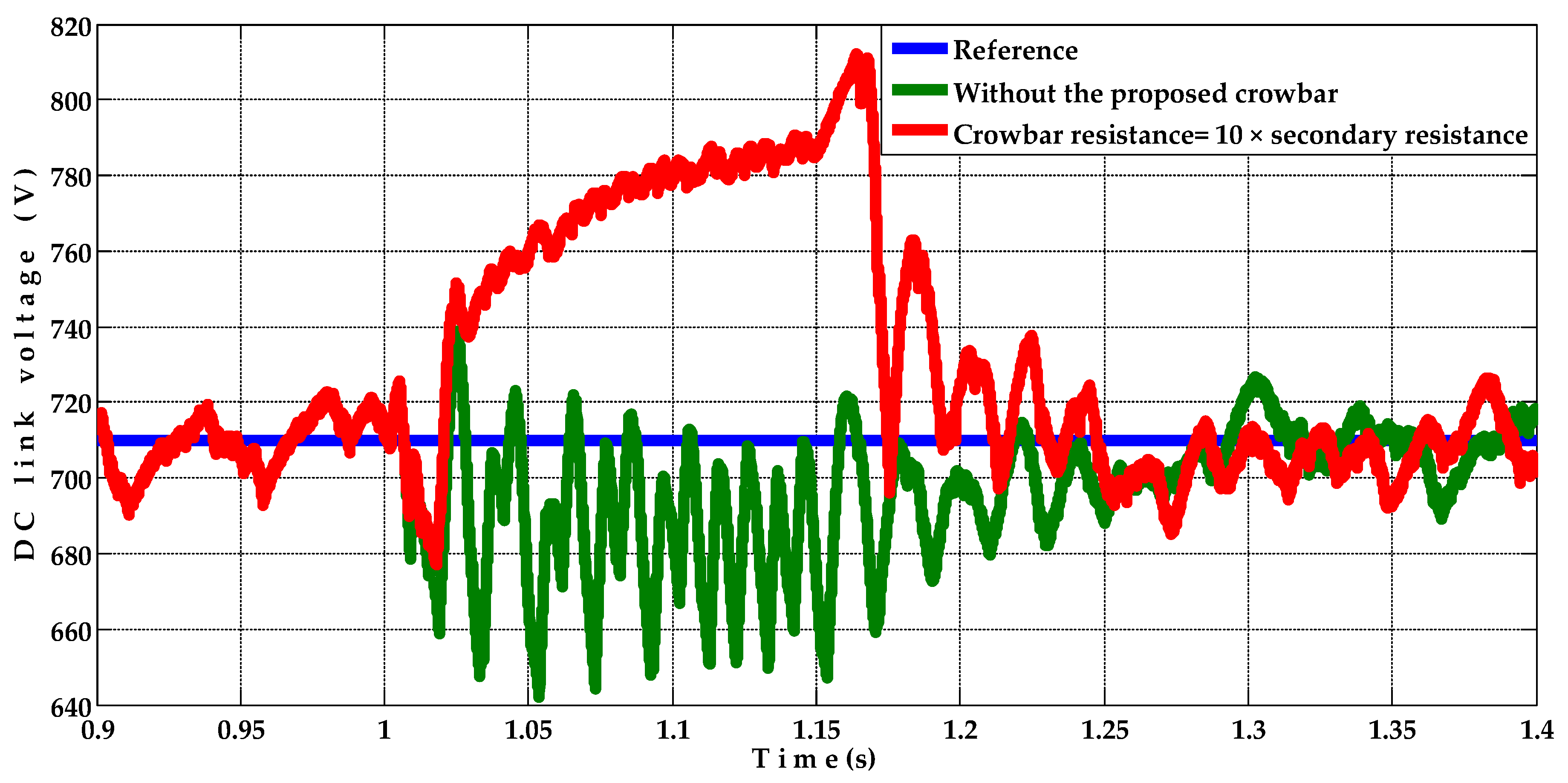
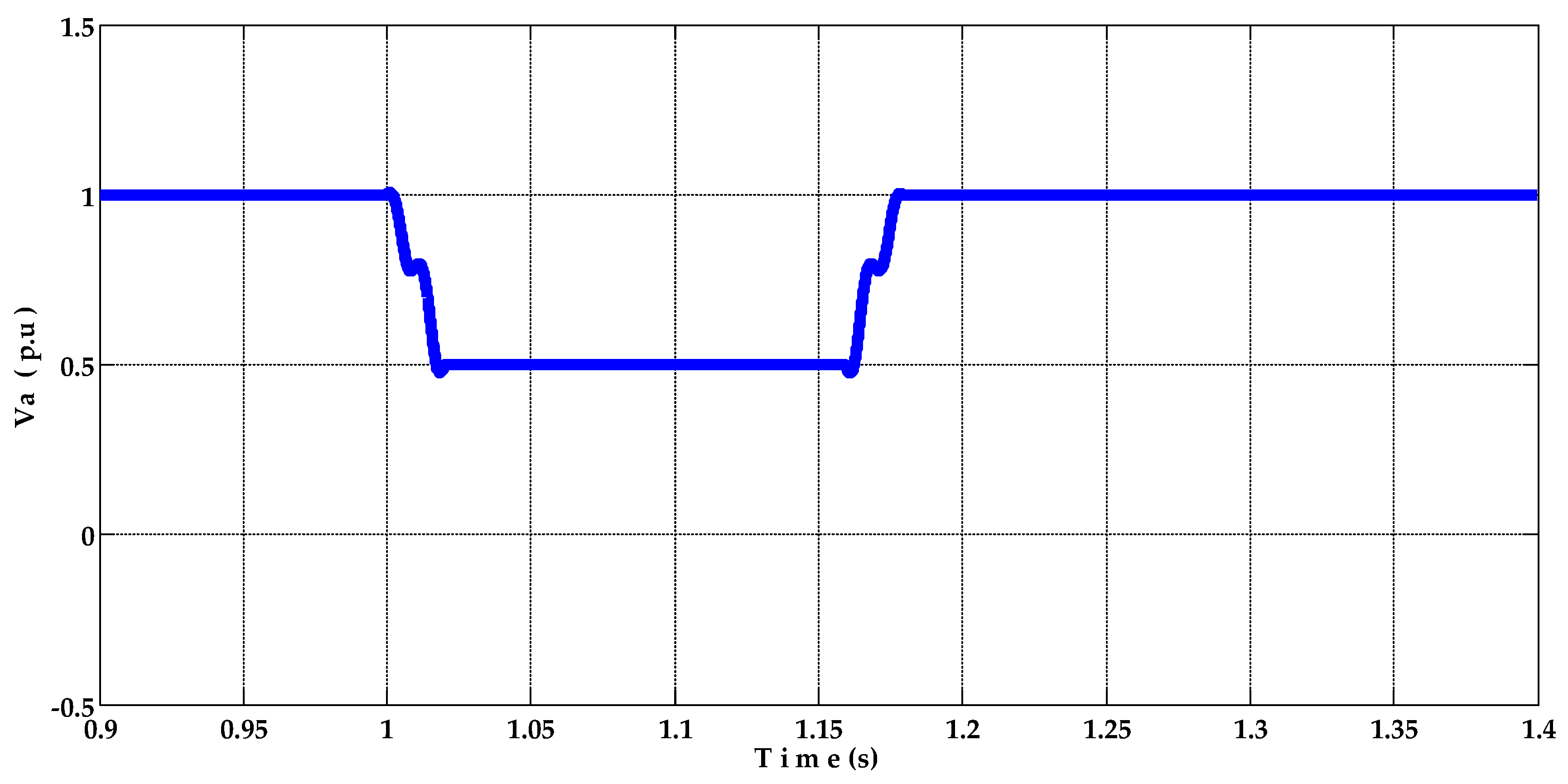
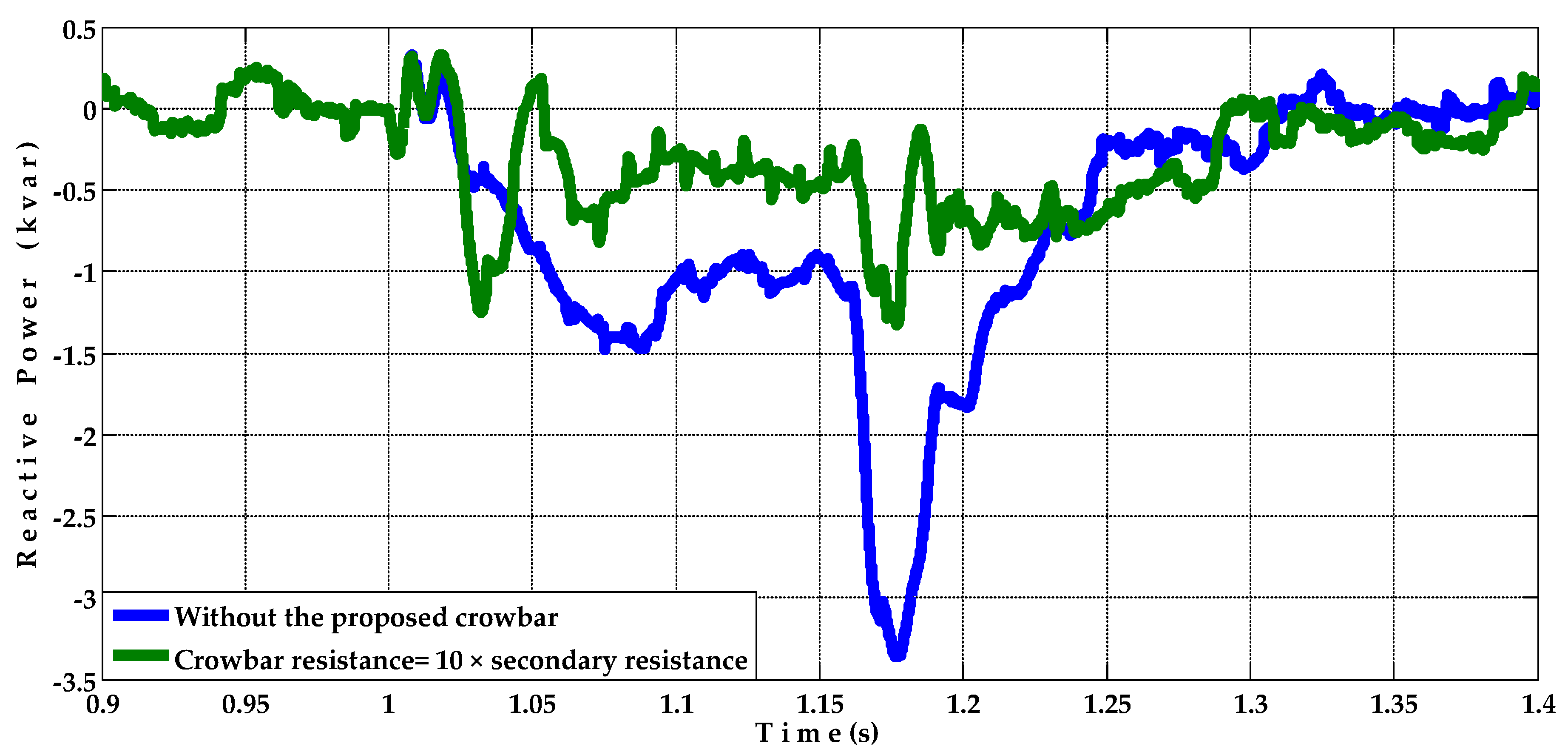
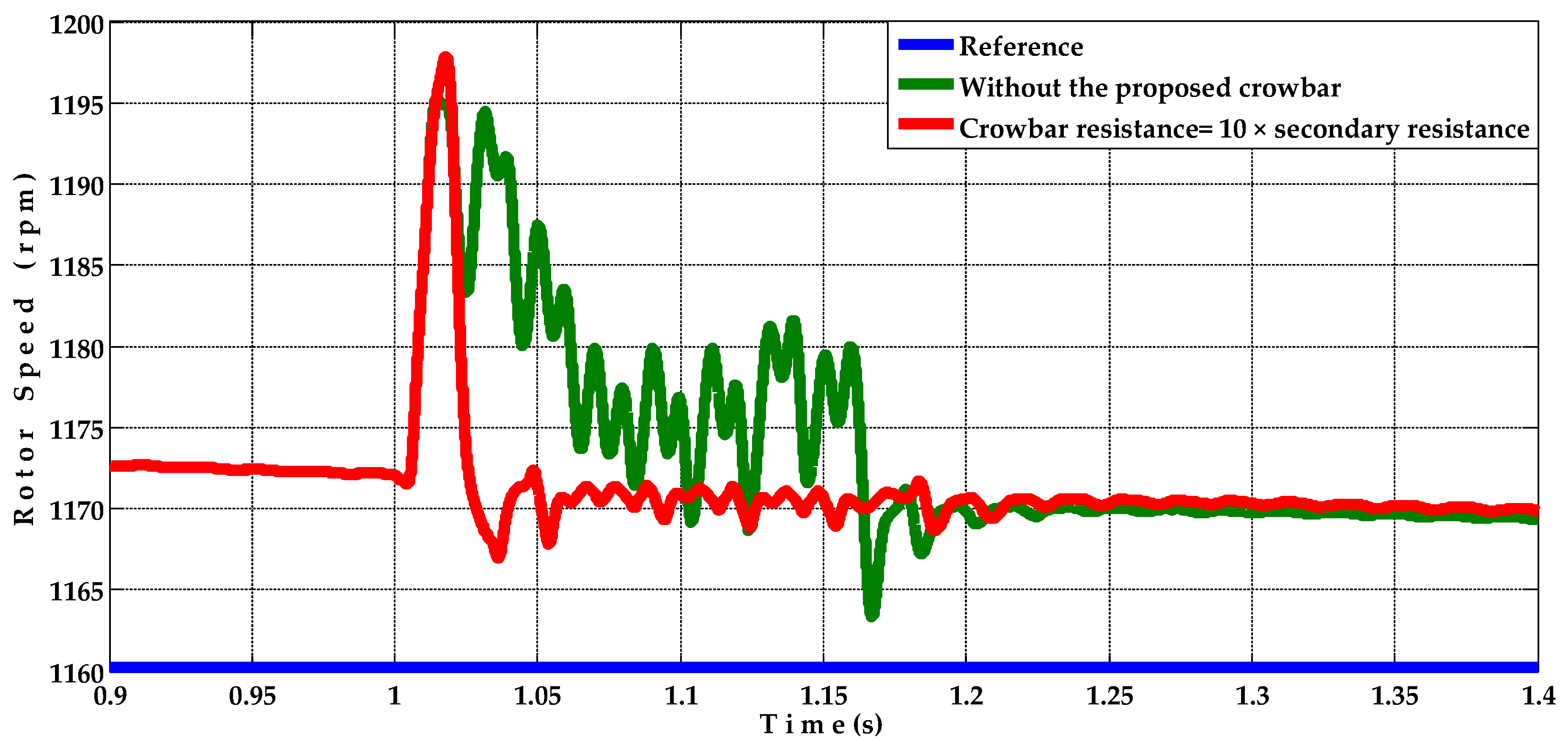
5.2.1. Single-Line to Ground Fault (The Fault Is Applied at Phase a)
5.2.2. Line to Line Fault (The Fault Is Applied at Phases a and b)
5.2.3. Double Line to Ground Fault (The Fault Is Applied at Phases a and b)
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| List of Abbreviations | |
| BDFRG | Brushless Doubly Fed Reluctance Generator |
| VSWT | Variable Speed Wind Turbine |
| WT | Wind Turbine |
| WECS | Wind Energy Conversion System |
| SCIG | Squirrel Cage Induction Generator |
| DFIG | Doubly Fed Induction Generator |
| BDFM | Brushless Doubly Fed Machine |
| BDFIM | Brushless Doubly Fed Induction Machine |
| BDFRM | Brushless Doubly Fed Reluctance Machine |
| BDFIG | Brushless Doubly Fed Induction Generator |
| MSC | Machine Side Converter |
| GSC | Grid Side Converter |
| MPPT | Maximum Power Point Tracking |
| SPWM | Sinusoidal Pulse Width Modulation |
| IFOC | Indirect Field Oriented Control |
| PLL | Phase-Locked Loop |
| RMS | Root Mean Square |
| ANFIS | Adaptive Neuro Fuzzy Inference System |
| List of Symbols | |
| speed of reference frame of power winding | |
| r | electrical speed of rotor |
| vdp | direct voltage component for power winding |
| vqp | quadrature voltage component for power winding |
| vdc | direct voltage component for control winding |
| vqc | quadrature voltage component for control winding |
| rp | resistance of power winding |
| rc | resistance of control winding |
| λdp | direct flux component for power winding |
| λqp | quadrature flux component for power winding |
| λdc | direct flux component for control winding |
| λqc | quadrature flux component for control winding |
| idp | direct current component for power winding |
| iqp | quadrature current component for power winding |
| idc | direct current component for control winding |
| iqc | quadrature current component for control winding |
| Lp | inductance of power winding |
| Lc | inductance of control winding |
| Lpc | mutual inductance between power and control winding |
| Te | electrical torque produced from generator |
| pr | number of poles for rotor |
| Tm | mechanical torque from turbine |
| ng | turns ratio for gear box |
| wrm | mechanical speed of rotor |
| Jr | moment of inertia for wind turbine |
| Jg | moment of inertia for generator |
| p | angular speed for power winding |
| s | angular speed for control winding |
| θp | primary flux angle |
| θg | grid current angle |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated Line Voltage | Rated Frequency | rp | rc | Lp | Lc | Lpc | Rotor Inertia, Jg |
|---|---|---|---|---|---|---|---|
| 380 V | 50 Hz | 3.781 Ω | 2.441 Ω | 0.41 H | 0.316 H | 0.3 H | 0.2 kg.m2 |
| Rated Power | Turbine Radius, R | Wind Speed Range | Turbine Inertia, Jr | Gearbox Ratio, ng |
|---|---|---|---|---|
| 6 kW | 4 m | 2–12 m/s | 1.5 kg. m2 | 7.5 |
References
- Global Wind Energy Council. Global Wind Report 2022. Available online: https://gwec.net/ (accessed on 9 May 2022).
- Wu, B.; Lang, Y.; Zargari, N.; Kouro, S. Fundamentals of Wind Evergy Conversion System Control. In Power Conversion and Control of Wind Energy Systems; Wiley-IEEE Press: Piscataway, NJ, USA, 2011; pp. 25–47. [Google Scholar] [CrossRef]
- Sugirtha, M.G.; Latha, P. Analysis of power quality problems in grid connected wind power plant. In Proceedings of the 2011 International Conference on Recent Advancements in Electrical, Electronics and Control Engineering, Sivakasi, India, 15–17 December 2011; pp. 19–24. [Google Scholar] [CrossRef]
- Mousa, M.G.; Allam, S.M.; Rashad, E.M. Maximum power tracking of a grid-connected wind-driven brushless doubly-fed reluctance generator using scalar control. In Proceedings of the 8th IEEE GCC Conference and Exhibition, Muscat, Oman, 1–4 February 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Allam, S.M.; Azmy, A.M.; El-Khazendar, M.A.; Mohamadein, A.L. Dynamic analysis of a BDFIM with a simple-proposed modification in the cage-rotor. In Proceedings of the 13th International Middle-East Power Systems Conference (MEPCON’2009), Cairo, Egypt, 13–15 December 2009; pp. 356–360. [Google Scholar]
- Taluo, T.; Ristić, L.; Jovanović, M. Dynamic Modeling and Control of BDFRG under Unbalanced Grid Conditions. Energies 2021, 14, 4297. [Google Scholar] [CrossRef]
- Moazen, M.; Kazemzadeh, R.; Azizian, M.-R. Mathematical Proof of BDFRG Model under Unbalanced Grid Voltage Condition. Sustain. Energy Grids Netw. 2020, 21, 100327. [Google Scholar] [CrossRef]
- Kalaivani, M.; Kalappan, K.B. Design and Modeling of Brushless Doubly-Fed Reluctance Generator for Wind Mills. Int. J. Recent Technol. Eng. (IJRTE) 2019, 8, 74–80. [Google Scholar] [CrossRef]
- Ademi, S.; Jovanovic, M.G.; Hasan, M. Control of Brushless Doubly-Fed Reluctance Generators for Wind Energy Conversion Systems. IEEE Trans. Energy Convers. 2015, 30, 596–604. [Google Scholar] [CrossRef]
- Jin, S.; Shi, L.; Zhu, L.; Cao, W.; Dong, T.; Zhang, F. Dual Two-Level Converters Based on Direct Power Control for an Open-Winding Brushless Doubly-Fed Reluctance Generator. IEEE Trans. Ind. Appl. 2017, 53, 3898–3906. [Google Scholar] [CrossRef] [Green Version]
- Moazen, M.; Kazemzadeh, R.; Azizian, M.R. Power control of BDFRG variable-speed wind turbine system covering all wind velocity ranges. Int. J. Renew. Energy Res. 2016, 6, 477–486. [Google Scholar] [CrossRef]
- Kumar, M.; Das, S.; Kiran, K. Sensorless Speed Estimation of Brushless Doubly-Fed Reluctance Generator Using Active Power Based MRAS. IEEE Trans. Power Electron. 2019, 34, 7878–7886. [Google Scholar] [CrossRef]
- Kumar, M.; Das, S. Model reference adaptive system based sensorless speed estimation of brushless doubly-fed reluctance generator for wind power application. IET Power Electron. 2018, 11, 2355–2366. [Google Scholar] [CrossRef]
- Moazen, M.; Kazemzadeh, R.; Azizian, M.R. Model-based predictive direct power control of brushless doubly fed reluctance generator for wind power applications. Alex. Eng. J. 2016, 55, 2497–2507. [Google Scholar] [CrossRef] [Green Version]
- Rihan, M.; Nasrallah, M.; Hasanin, B. Performance analysis of grid-integrated brushless doubly fed reluctance generator-based wind turbine: Modelling, control and simulation. SN Appl. Sci. 2020, 2, 114. [Google Scholar] [CrossRef] [Green Version]
- Tsili, M.; Papathanassiou, S. A review of grid code technical requirements for wind farms. IET Renew. Power Gener. 2009, 3, 308–332. [Google Scholar] [CrossRef]
- Wu, Q.; Sun, Y. Grid Code Requirements for Wind Power Integration. In Modeling and Modern Control of Wind Power; Wiley-IEEE Press: Piscataway, NJ, USA, 2017; pp. 20–53. [Google Scholar] [CrossRef]
- Hu, Y.-L.; Wu, Y.-K.; Chen, C.-K.; Wang, C.-H.; Chen, W.-T.; Choc, L.-I. A Review of the Low-Voltage Ride- Through Capability of Wind Power Generators. In Proceedings of the 4th International Conference on Power and Energy Systems Engineering, CPESE 2017, Berlin, Germany, 25–29 September 2017. [Google Scholar] [CrossRef]
- Wind Farm Grid Connection Code in Addition to the Egyptian Transmission Grid Code (ETGC). Available online: https://www.eehc.gov.eg/eehcportalnew/NewEnergyPDF/Egypt_gridcode_for_wind_farm_connection.pdf (accessed on 9 May 2022).
- Duong, M.Q.; Leva, S.; Mussetta, M.; Le, K.H. A Comparative Study on Controllers for Improving Transient Stability of DFIG Wind Turbines During Large Disturbances. Energies 2018, 11, 480. [Google Scholar] [CrossRef] [Green Version]
- Long, T.; Shao, S.; Malliband, P.; Abdi, E.; McMahon, R.A. Crowbarless Fault Ride-Through of the Brushless Doubly Fed Induction Generator in a Wind Turbine Under Symmetrical Voltage Dips. IEEE Trans. Ind. Electron. 2013, 60, 2833–2841. [Google Scholar] [CrossRef]
- Hansen, A.D.; Michalke, G. Fault ride-through capability of DFIG wind turbines. Renew. Energy 2007, 32, 1594–1610. [Google Scholar] [CrossRef]
- Abad, G.; Rodriguez, M.; Poza, J.; Canales, J.M. Direct torque control for doubly fed induction machine-based wind turbines under voltage dips and without crowbar protection. IEEE Trans. Energy Convers. 2010, 25, 586–588. [Google Scholar] [CrossRef]
- Xiang, D.; Ran, L.; Tavner, P.J.; Yang, S. Control of a doubly fed induction generator in a wind turbine during grid fault ride-through. IEEE Trans. Energy Convers. 2006, 21, 652–662. [Google Scholar] [CrossRef] [Green Version]
- Betz, R.E.; Jovanovic, M.G. Introduction to Brushless Doubly Fed Reluctance Machines. The Basic Equations; Alborg University: Alborg, Denmark, 1998. [Google Scholar] [CrossRef]
- Jovanovi, M.; Chaal, H. High-Performance Control of Doubly-Fed Reluctance Machines. Electronics 2010, 14, 72–77. [Google Scholar]
- Ademi, S.; Jovanovid, M.; Obichere, J.K. Comparative analysis of control strategies for large doubly-fed reluctance wind generators. In Proceedings of the World Congress on Engineering and Computer Science WCECS 2014, San Francisco, CA, USA, 22–24 October 2014. [Google Scholar]
- Rihan, M. Comparison among Different Crowbar Protection Techniques for Modern Wind Farms under Short Circuit Occurrence. In Proceedings of the 19th International Middle East Power Systems Conference (MEPCON’19), Cairo, Egypt, 19–21 December 2017; pp. 1113–1121. [Google Scholar] [CrossRef]
- Noureldeen, O.; Hamdan, I. An efficient ANFIS crowbar protection for dfig wind turbines during faults. In Proceedings of the 19th International Middle East Power Systems Conference (MEPCON’19), Cairo, Egypt, 19–21 December 2017; pp. 263–269. [Google Scholar] [CrossRef]
- Noureldeen, O. Behavior of DFIG Wind Turbines with Crowbar Protection under Short Circuit. Int. J. Electr. Comput. Sci. IJECS-IJENS 2012, 12, 32–37. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rihan, M.; Nasrallah, M.; Hasanin, B.; El-Shahat, A. A Proposed Controllable Crowbar for a Brushless Doubly-Fed Reluctance Generator, a Grid-Integrated Wind Turbine. Energies 2022, 15, 3894. https://doi.org/10.3390/en15113894
Rihan M, Nasrallah M, Hasanin B, El-Shahat A. A Proposed Controllable Crowbar for a Brushless Doubly-Fed Reluctance Generator, a Grid-Integrated Wind Turbine. Energies. 2022; 15(11):3894. https://doi.org/10.3390/en15113894
Chicago/Turabian StyleRihan, Mahmoud, Mahmoud Nasrallah, Barkat Hasanin, and Adel El-Shahat. 2022. "A Proposed Controllable Crowbar for a Brushless Doubly-Fed Reluctance Generator, a Grid-Integrated Wind Turbine" Energies 15, no. 11: 3894. https://doi.org/10.3390/en15113894
APA StyleRihan, M., Nasrallah, M., Hasanin, B., & El-Shahat, A. (2022). A Proposed Controllable Crowbar for a Brushless Doubly-Fed Reluctance Generator, a Grid-Integrated Wind Turbine. Energies, 15(11), 3894. https://doi.org/10.3390/en15113894