
A Two-Stage EV Charging Planning and Network Reconfiguration Methodology towards Power Loss Minimization in Low and Medium Voltage Distribution Networks


Abstract
:1. Introduction
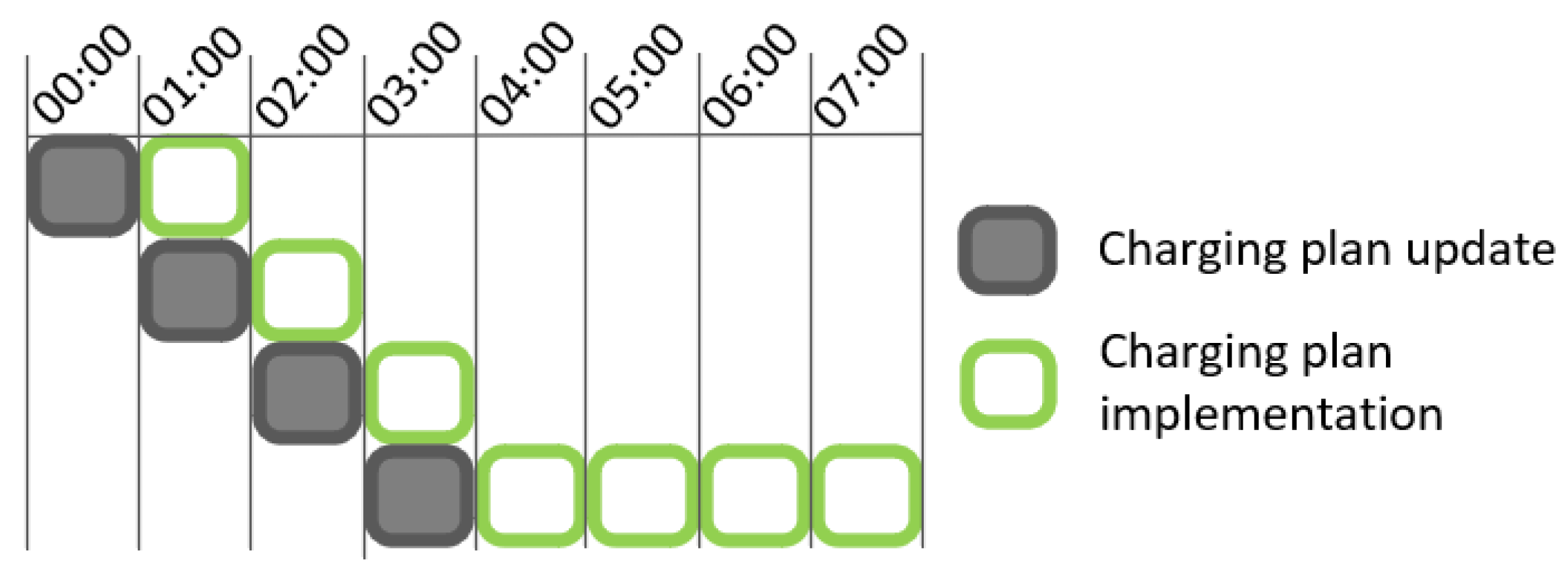
- Real-time hourly EV smart charging scheduling update in LV DNs that deals with uncertainties in EVs’ time of arrival due to forecasting errors.
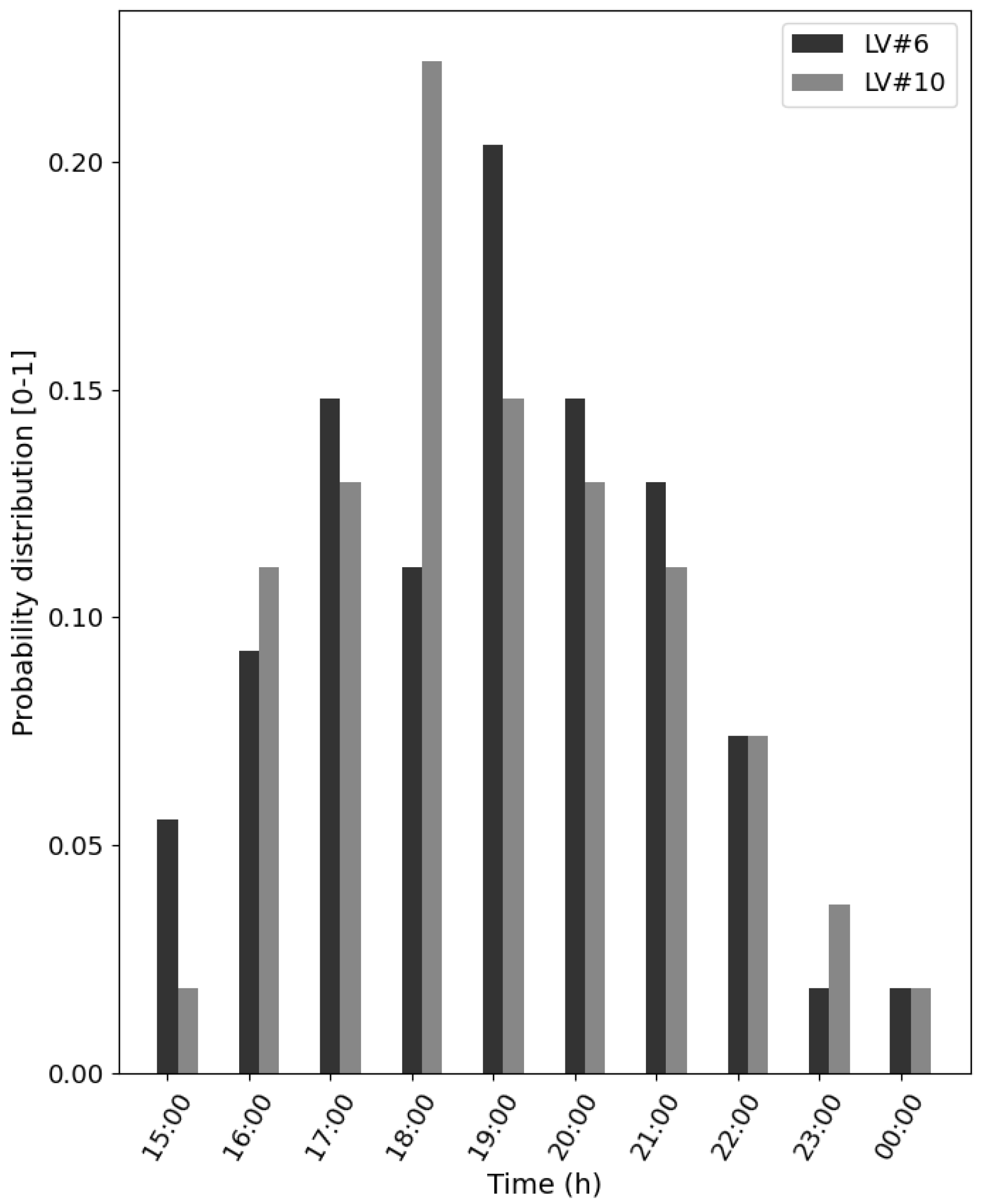
- Consideration of residential EV charging by taking into account the layout of a real LV DN and using real data about the loading of the network and its electrical characteristics, i.e., lines’ length and impedance.
- Power loss minimization in LV DNs due to the proper time allocation of EVs’ charging that in turn results in smoother loading for the nodes of the MV DN and in lower power losses at the MV network.
- Further power loss reduction by planning the NR application on the MV DN for the next day. The optimal reconfigured topology for the MV DN is constant for the whole day in order to avoid frequent switching operations, e.g., hourly NR, that could result in frequent disturbances and could impose the need for the frequent replacement of the switches.
- Simple and straightforward cooperation between the DSO and potential aggregators in order to minimize the power losses and improve the power quality and the efficiency in both MV DN and LV DNs.
2. Problem Formulation
2.1. Objective Function
- and are the minimum and maximum voltage magnitudes of node j, respectively.
- indicates the maximum thermal threshold of branch l.
- and are vectors of load flow calculated active and reactive power.
- and indicate the loads’ demand of active and reactive power, respectively.
- is a binary vector. The element is equal to 1 in case generator is located at bus ; otherwise, it is equal to 0.
- and are vectors referring to active and reactive power generation.
- and are vectors referring to the difference between the demanded and generated active and reactive power.
2.2. EVs’ Smart Charging Planning
2.3. Network Reconfiguration
3. Proposed Algorithm
3.1. UPSO Formulation for EV Smart Charging
3.2. UPSO Formulation for NR
4. Results
4.1. LV DN under Study
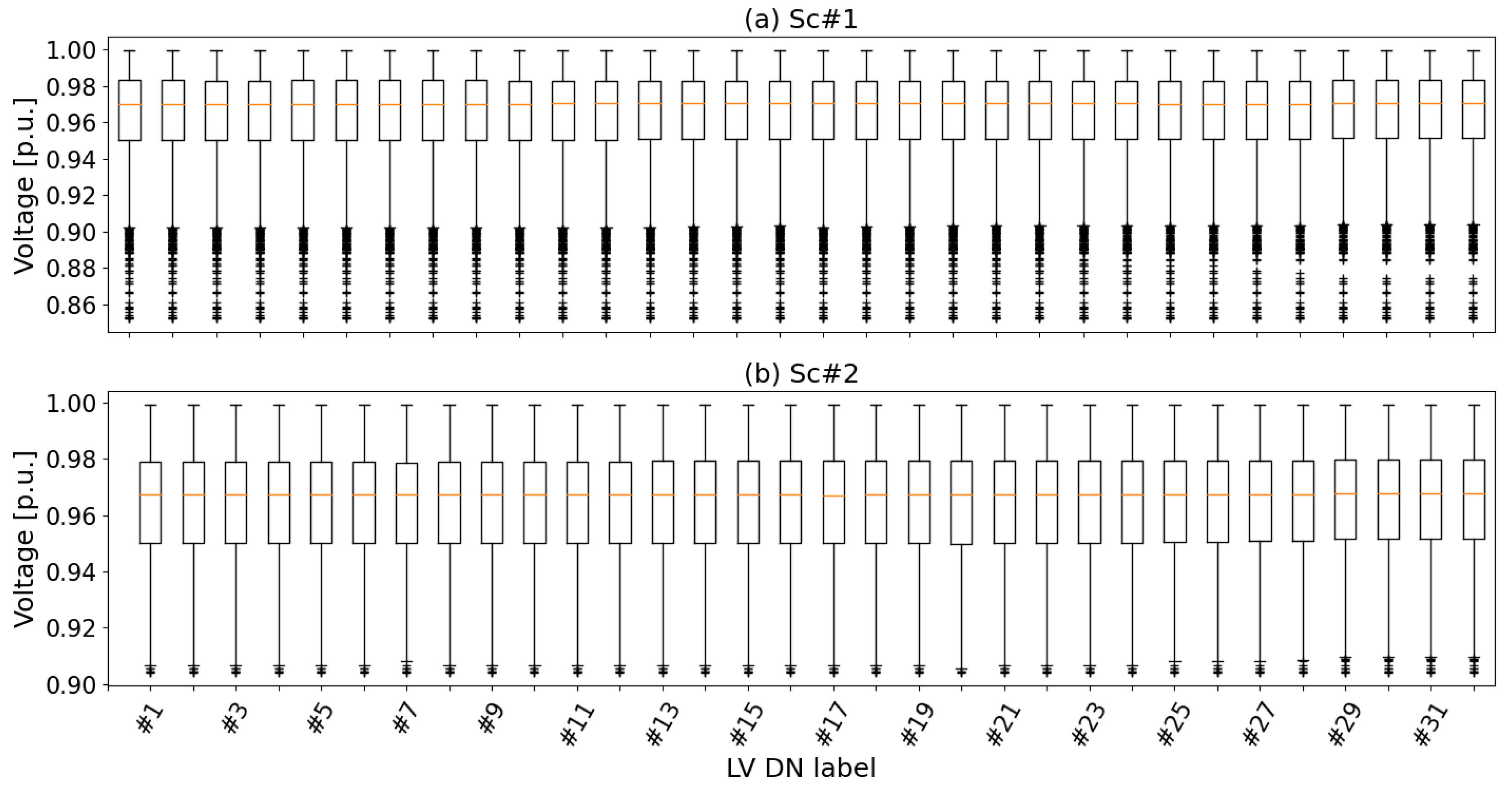
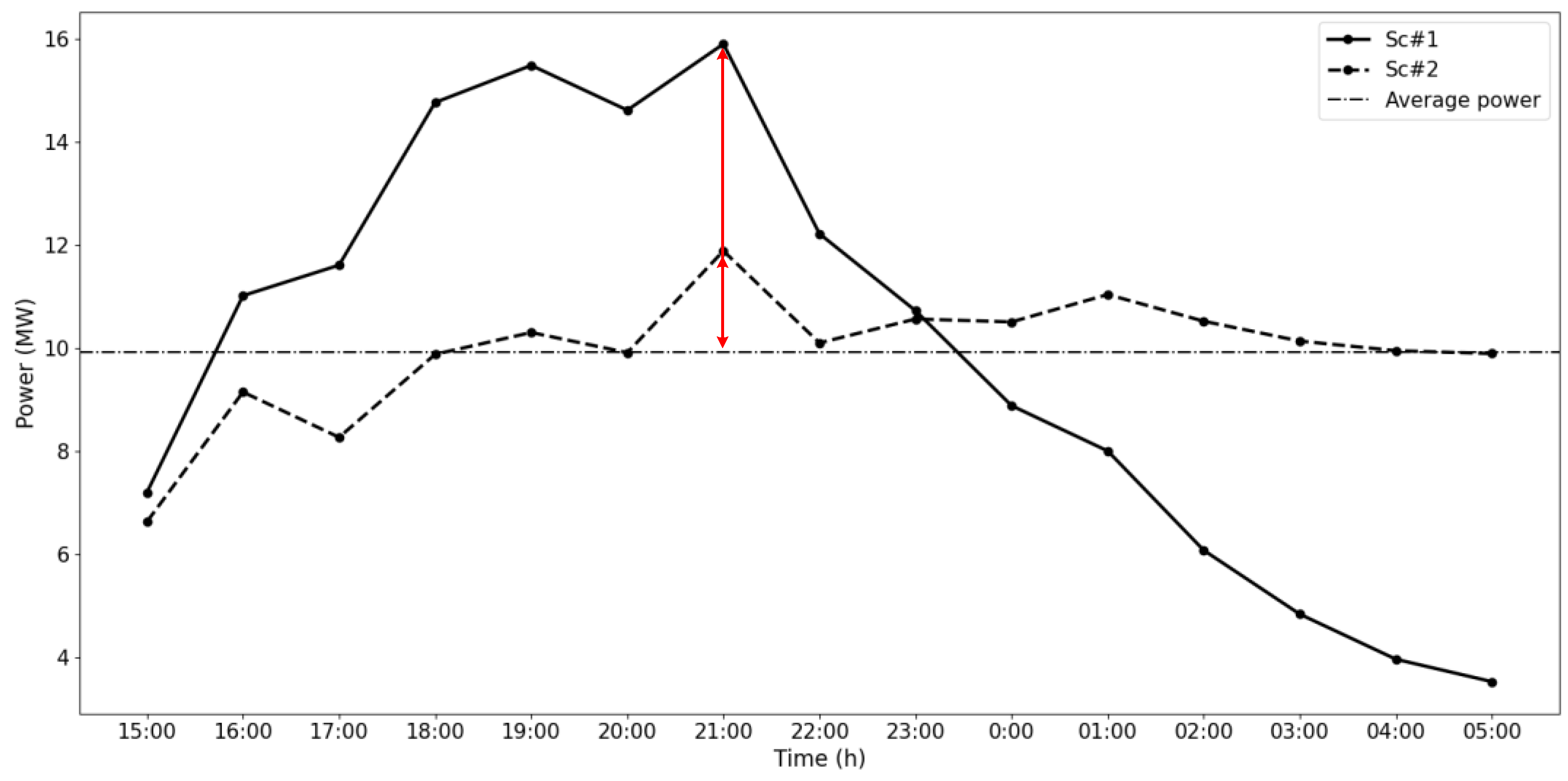
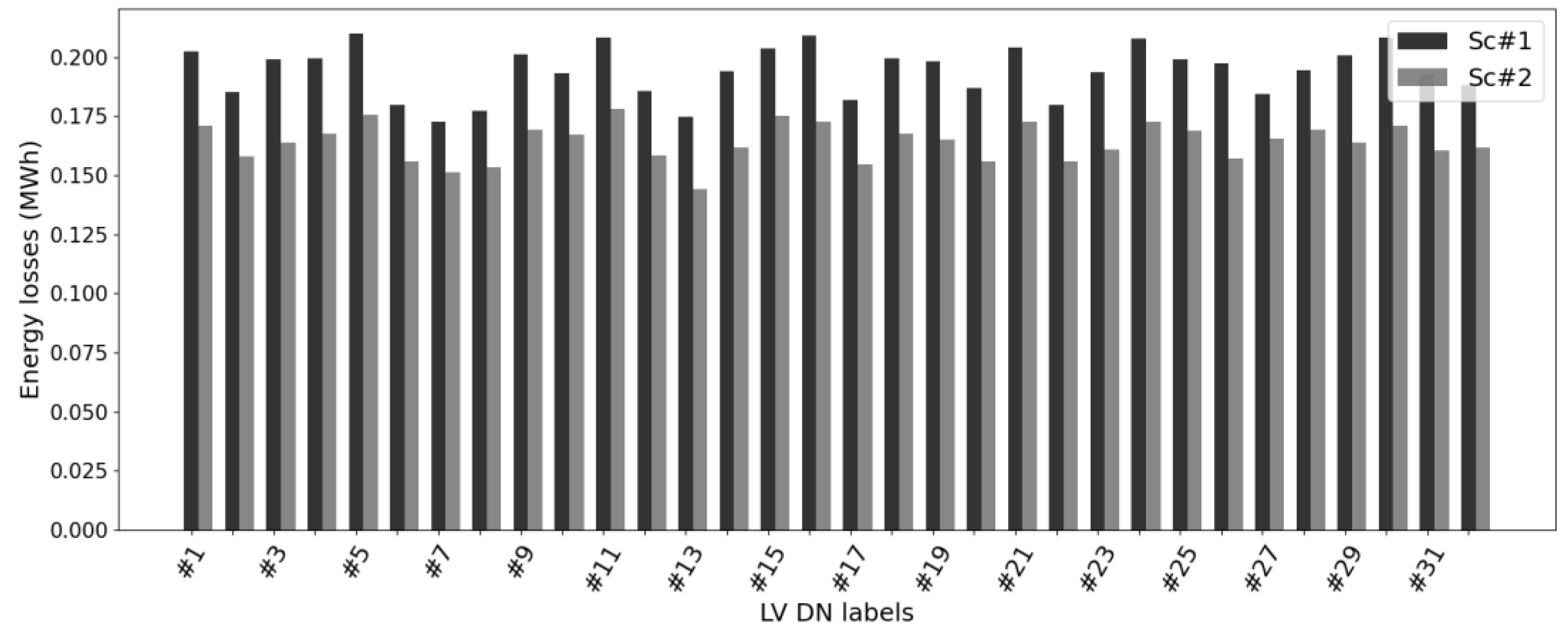
- Sc#1: This is the base scenario at which the EVs start charging by the time of their arrival and until they are fully charged. Thus, no charging planning is applied in this case.
- Sc#2: In this scenario, the proposed EVs’ charging planning methodology is applied.
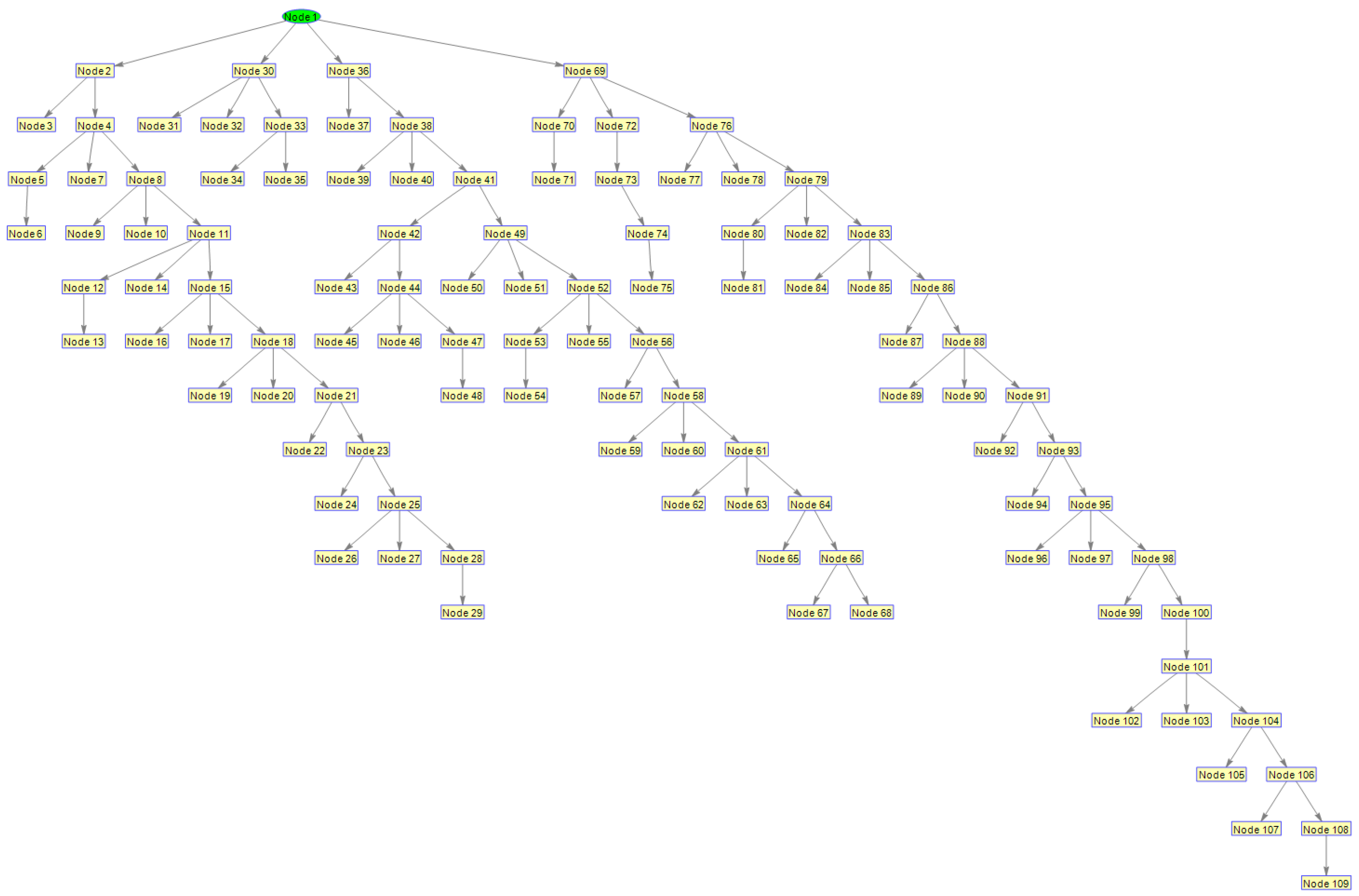
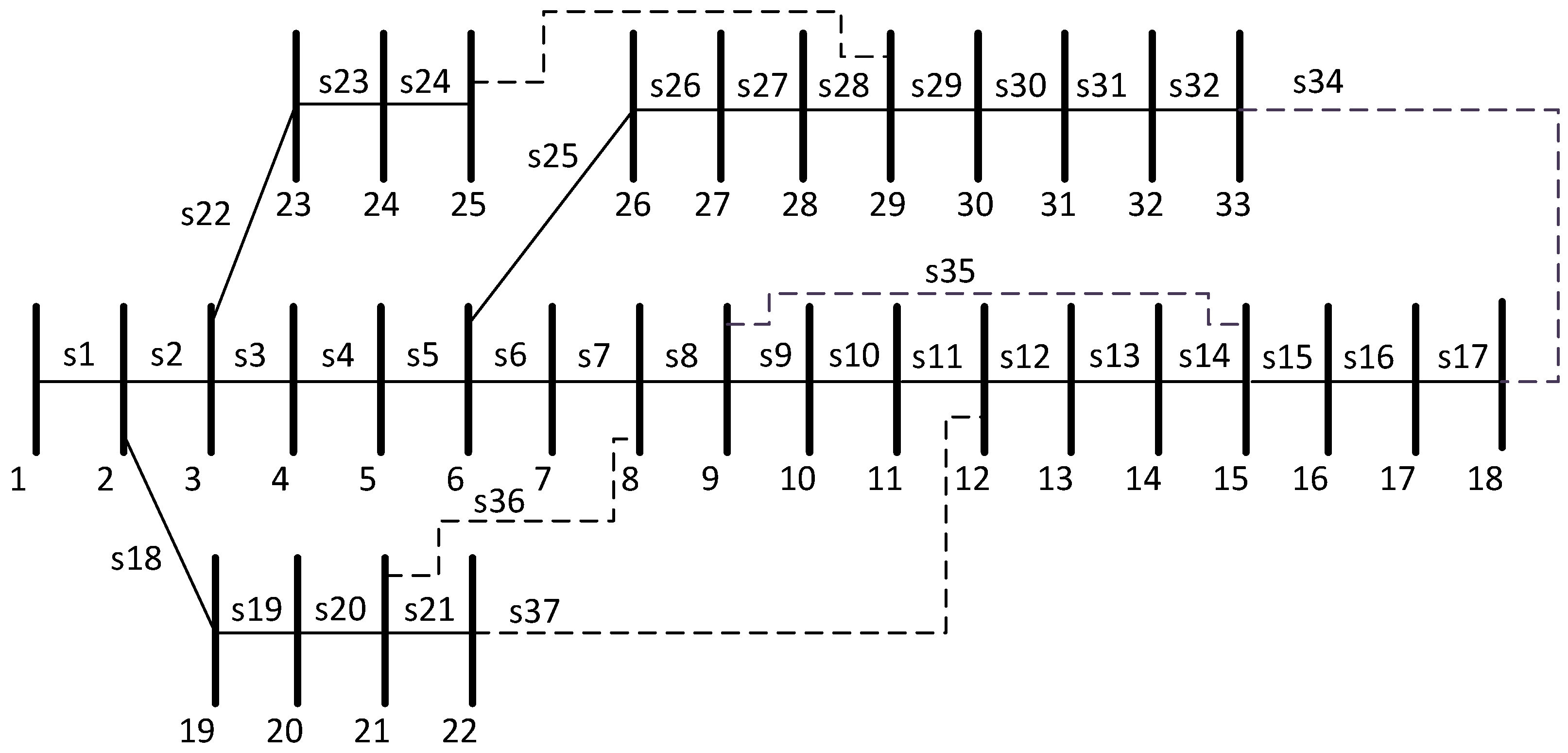
4.2. MV DN under Study
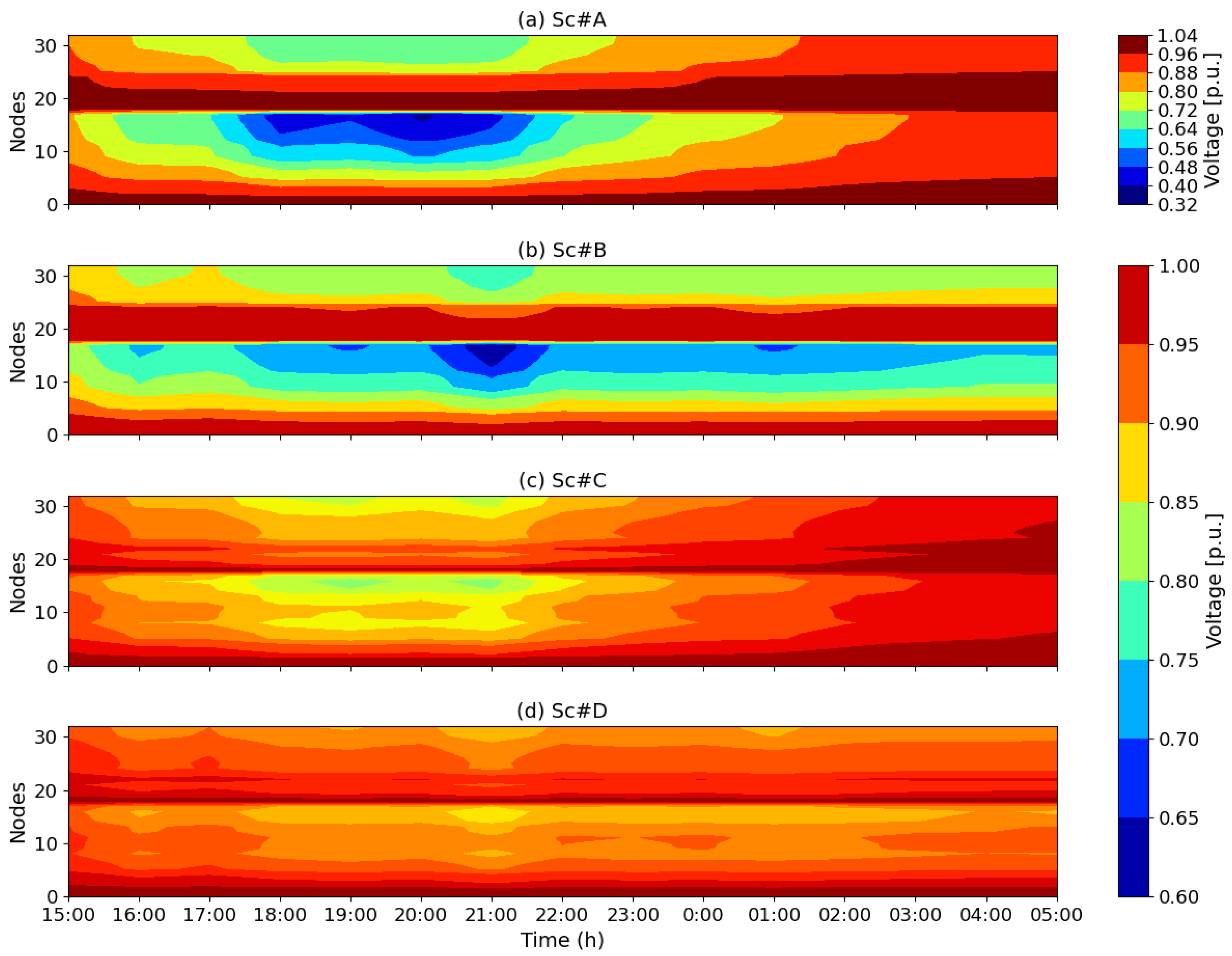
- Sc#A: This is the base scenario in which NR and charging scheduling are not applied to the MV and LV DNs, respectively.
- Sc#B: In this scenario, NR is not applied to MV DN. However, the EV charging scheduling is applied to LV DN. The aim here is to investigate how the load demand smoothing in the LV side network could contribute to reducing power losses also in the MV network.
- Sc#C: In this scenario, the NR is applied at MV DN, while the EVs charging is not considered.
- Sc#D: Both NR and charging scheduling are applied to MV and LV DNs, respectively.
4.3. Results at LV DN
4.4. Results at MV and LV DN
5. Conclusions
- At the LV level, the coordinated charging of EVs can lead to a power loss reduction between 10.25% and 20.35%.
- At the MV level, the employment of charging scheduling can decrease the power losses of MV DN by 30.88%.
- The employment of both charging scheduling and NR results in a significant power loss reduction of 63.64%.
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- European Comission. Directive of the European Parliament and of the Council on Energy Efficiency (Recast). 2021/0203(COD); European Comission: Brussels, Belgium, 2021; Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=Celex:52021PC0558 (accessed on 15 January 2002).
- Directive 2012/27/EU of the European Parliament and of the Council of 25 October 2012 on Energy Efficiency, Amending Directives 2009/125/EC and 2010/30/EU and repealing Directives 2004/8/EC and 2006/32/EC. Off. J. Eur. Union 2012. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32012L0027&from=en (accessed on 15 January 2002).
- Council of European Energy Regulators (CEER). 2nd CEER Report on Energy Losses; CEER: Brussels, Belgium, 2020; Available online: https://www.ceer.eu/documents/104400/-/-/fd4178b4-ed00-6d06-5f4b-8b87d630b060 (accessed on 15 January 2002).
- Bompard, E.; Serrenho, T.; Bertoldi, P.; European Commission. Improving Energy Efficiency in Electricity Networks: Addressing Network Losses & EU regulations under Article 15 (2) (a) of the Energy Efficiency Directive. 2020. Available online: https://op.europa.eu/en/publication-detail/-/publication/f5d89f60-344e-11eb-b27b-01aa75ed71a1 (accessed on 15 January 2002).
- European Union Agency for the Cooperation of Energy Regulators (ACER). Report on Distribution Tariff Methodologies in Europe. 2021. Available online: https://documents.acer.europa.eu/Official_documents/Acts_of_the_Agency/Publication/ACER%20Report%20on%20D-Tariff%20Methodologies.pdf (accessed on 16 January 2002).
- European Commission. Communication from the Commission: The European Green Deal. COM(2019) 640 Final; European Commission: Brussels, Belgium, 2019; Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?qid=1576150542719&uri=COM%3A2019%3A640%3AFIN (accessed on 16 January 2002).
- Wróblewski, P.; Drożdż, W.; Lewicki, W.; Dowejko, J. Total Cost of Ownership and Its Potential Consequences for the Development of the Hydrogen Fuel Cell Powered Vehicle Market in Poland. Energies 2021, 14, 2131. [Google Scholar] [CrossRef]
- Wróblewski, P.; Kupiec, J.; Drożdż, W.; Lewicki, W.; Jaworski, J. The Economic Aspect of Using Different Plug-In Hybrid Driving Techniques in Urban Conditions. Energies 2021, 14, 3543. [Google Scholar] [CrossRef]
- EV and EV Charger Incentives in Europe: A Complete Guide for Businesses and Individuals. Available online: https://blog.wallbox.com/ev-incentives-europe-guide/#index_5 (accessed on 17 January 2002).
- Hussain, M.T.; Bin Sulaiman, N.; Jabir, M. Optimal Management strategies to solve issues of grid having Electric Vehicles (EV): A review. J. Energy Storage 2021, 33, 102114. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Z.; Huangfu, Y.; Ravey, A.; Chrenko, D.; Gao, F. Hierarchical Operation of Electric Vehicle Charging Station in Smart Grid Integration Applications—An Overview. Int. J. Electr. Power Energy Syst. 2022, 139, 108005. [Google Scholar] [CrossRef]
- Bouhouras, A.S.; Gaidatzis, P.P.; Labridis, D. Handbook of Optimization in Electric Power Distribution Systems; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Kothona, D.; Bouhouras, A.S.; Skalidi, I.; Gkaidatzis, P.; Poulakis, N.; Christoforidis, G.C. EV Flexibility Contribution to Distribution Network Operation. In Proceedings of the 12th Mediterranean Conference on Power Generation, Transmission, Distribution and Energy Conversion (MEDPOWER 2020), Paphos, Cyprus, 9–12 November 2020. [Google Scholar]
- Helmi, A.M.; Carli, R.; Dotoli, M.; Ramadan, H.S. Efficient and Sustainable Reconfiguration of Distribution Networks via Metaheuristic Optimization. IEEE Trans. Autom. Sci. Eng. 2021, 19, 82–98. [Google Scholar] [CrossRef]
- Abdul, W.I.A.B.W.; Saedi, A.B.; Peeie, M.H.B.; Hanifah, M.S.B.A. Modeling of the Network Reconfiguration Considering Electric Vehicle Charging Load. In Proceedings of the 2021 8th International Conference on Computer and Communication Engineering (ICCCE), Kuala Lumpur, Malaysia, 22–23 June 2021. [Google Scholar]
- Salkuti, S.R. Network Reconfiguration of Distribution System with Distributed Generation, Shunt Capacitors and Electric Vehicle Charging Stations. In Next Generation Smart Grids: Modeling, Control and Optimization. Lecture Notes in Electrical Engineering; Springer: Singapore, 2022. [Google Scholar]
- Sun, Q.; Yu, Y.; Li, D.; Hu, X. A distribution network reconstruction method with DG and EV based on improved gravitation algorithm. Syst. Sci. Control Eng. 2020, 9, 6–13. [Google Scholar] [CrossRef]
- Jangdoost, A.; Keypour, R.; Golmohamadi, H. Optimization of distribution network reconfguration by a novel RCA integrated with genetic algorithm. Energy Syst. 2021, 12, 801–833. [Google Scholar] [CrossRef]
- Pahlavanhoseini, A.; Sepasian, M.S. Scenario-based planning of fast charging stations considering network reconfiguration using cooperative coevolutionary approach. J. Energy Storage 2019, 23, 544–557. [Google Scholar] [CrossRef]
- Ahmad, F.; Iqbal, A.; Ashraf, I.; Marzband, M.; Khan, I. Optimal location of electric vehicle charging station and its impact on distribution network: A review. Energy Rep. 2022, 8, 2314–2333. [Google Scholar] [CrossRef]
- Nour, M.; Chaves-Ávila, J.P.; Magdy, G.; Sánchez-Miralles, Á. Review of Positive and Negative Impacts of Electric Vehicles Charging on Electric Power Systems. Energies 2020, 13, 4675. [Google Scholar] [CrossRef]
- Van Kriekinge, G.; De Cauwer, C.; Sapountzoglou, N.; Coosemans, T.; Messagie, M. Peak shaving and cost minimization using model predictive control for uni- and bi-directional charging of electric vehicles. Energy Rep. 2021, 7, 8760–8771. [Google Scholar] [CrossRef]
- Tu, R.; Gai, Y.J.; Farooq, B.; Posen, D.; Hatzopoulou, M. Electric vehicle charging optimization to minimize marginal greenhouse gas emissions from power generation. Appl. Energy 2020, 277, 115517. [Google Scholar] [CrossRef]
- Wang, J.; Wang, W.; Wang, H.; Zuo, H. Dynamic Reconfiguration of Multiobjective Distribution Networks Considering DG and EVs Based on a Novel LDBAS Algorithm. IEEE Access 2020, 8, 216873–216893. [Google Scholar] [CrossRef]
- Cheng, S.; Li, Z. Multi-objective Network Reconfiguration Considering V2G of Electric Vehicles in Distribution System with Renewable Energy. Energy Procedia 2019, 158, 278–283. [Google Scholar] [CrossRef]
- Rostami, M.-A.; Kavousi-Fard, A.; Niknam, T. Expected Cost Minimization of Smart Grids with Plug-In Hybrid Electric Vehicles Using Optimal Distribution Feeder Reconfiguration. IEEE Trans. Ind. Inform. 2015, 11, 388–397. [Google Scholar] [CrossRef]
- Singh, J.; Tiwari, R. Active and Reactive Power Management of EVs in Reconfigurable Distribution System. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020. [Google Scholar]
- Sedighizadeh, M.; Shaghaghi-Shahr, G.; Esmaili, M.; Aghamohammadi, M.R. Optimal distribution feeder reconfiguration and generation scheduling for microgrid day-ahead operation in the presence of electric vehicles considering uncertainties. J. Energy Storage 2018, 21, 58–71. [Google Scholar] [CrossRef]
- Singh, J.; Tiwari, R. Real power loss minimisation of smart grid with electric vehicles using distribution feeder reconfiguration. IET Gener. Transm. Distrib. 2019, 13, 4249–4261. [Google Scholar] [CrossRef]
- Amin, A.; Tareen, W.U.K.; Usman, M.; Memon, K.A.; Horan, B.; Mahmood, A.; Mekhilef, S. An Integrated Approach to Optimal Charging Scheduling of Electric Vehicles Integrated with Improved Medium-Voltage Network Reconfiguration for Power Loss Minimization. Sustainability 2020, 12, 9211. [Google Scholar] [CrossRef]
- EN. Directive (EU) 2018/844 of the European Parliament and of the Council of 30 May 2018 amending Directive 2010/31/EU on the energy performance of buildings and Directive 2012/27/EU on energy efficiency. Off. J. Eur. Union 2018, 156, 75–91. [Google Scholar]
- Kerscher, S.; Arboleya, P. The key role of aggregators in the energy transition under the latest European regulatory framework. Int. J. Electr. Power Energy Syst. 2021, 134, 107361. [Google Scholar] [CrossRef]
- Carli, R.; Dotoli, M. A Distributed Control Algorithm for Waterfilling of Networked Control Systems via Consensus. IEEE Control Syst. Lett. 2017, 1, 334–339. [Google Scholar] [CrossRef]
- Carli, R.; Dotoli, M. A Distributed Control Algorithm for Optimal Charging of Electric Vehicle Fleets with Congestion Management. IFAC PapersOnLine 2018, 51, 373–378. [Google Scholar] [CrossRef]
- Parise, F.; Grammatico, S.; Gentile, B.; Lygeros, J. Distributed convergence to Nash equilibria in network and average aggregative games. Automatica 2020, 117, 108959. [Google Scholar] [CrossRef]
- Jahangir, H.; Tayarani, H.; Ahmadian, A.; Golkar, M.A.; Miret, J.; Tayarani, M.; Gao, H.O. Charging demand of Plug-in Electric Vehicles: Forecasting travel behavior based on a novel Rough Artificial Neural Network approach. J. Clean. Prod. 2019, 229, 1029–1044. [Google Scholar] [CrossRef]
- Gkaidatzis, P.A.; Doukas, D.I.; Labridis, D.P.; Bouhouras, A.S. Comparative analysis of heuristic techniques applied to ODGP. In Proceedings of the 2017 17th IEEE International Conference on Environment and Electrical Engineering and 2017 1st IEEE Industrial and Commercial Power Systems Europe, EEEIC/I and CPS Europe 2017, Milan, Italy, 6–9 June 2017. [Google Scholar]
- Bouhouras, A.S.; Kothona, D.; Gkaidatzis, P.A.; Christoforidis, G.C. Distribution network energy loss reduction under EV charging schedule. Int. J. Energy Res. 2022, 46, 8256–8270. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Liu, Y.; Zhang, H.; Lv, G. Daily electric vehicle charging load profiles considering demographics of vehicle users. Appl. Energy 2020, 274, 115063. [Google Scholar] [CrossRef]
- Adaptive Charging Network Research Portal. Available online: https://ev.caltech.edu/index (accessed on 24 February 2021).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Objective Function at MV DN | Objective Function at LV DN | Multi-Hour Analysis | Optimization Stages | Residential Chargers | Consideration of VL DN Topology |
|---|---|---|---|---|---|---|
| Ref [24] |
|
| ✓ | Two stages | ✕ | ✕ |
| Ref [25] |
|
| ✓ | Two stages | ✕ | ✕ |
| Ref [26] |
|
| ✓ | Two stages | ✕ | ✕ |
| Ref [27] |
| ✓ | One stage | ✕ | ✕ | |
| Ref [28] |
| ✓ | One stage | ✕ | ✕ | |
| Ref [29] |
|
| ✓ | Two stages | ✓ | ✕ |
| Ref [30] |
|
| ✓ | Two stages | ✓ | ✕ |
| Present study |
|
| ✓ | Two stages | ✓ | ✓ |
| Variables | |
| Type | Number of Variables |
| Integer | 1 |
| Binary | 1 |
| Continues | 6 |
| Constraints | |
| Type | Number of Constraints |
| Equality linear constraints | 4 |
| Equality non-linear constraints | 1 |
| Bounded constraints | 1 |
| Inequality constraints | 1 |
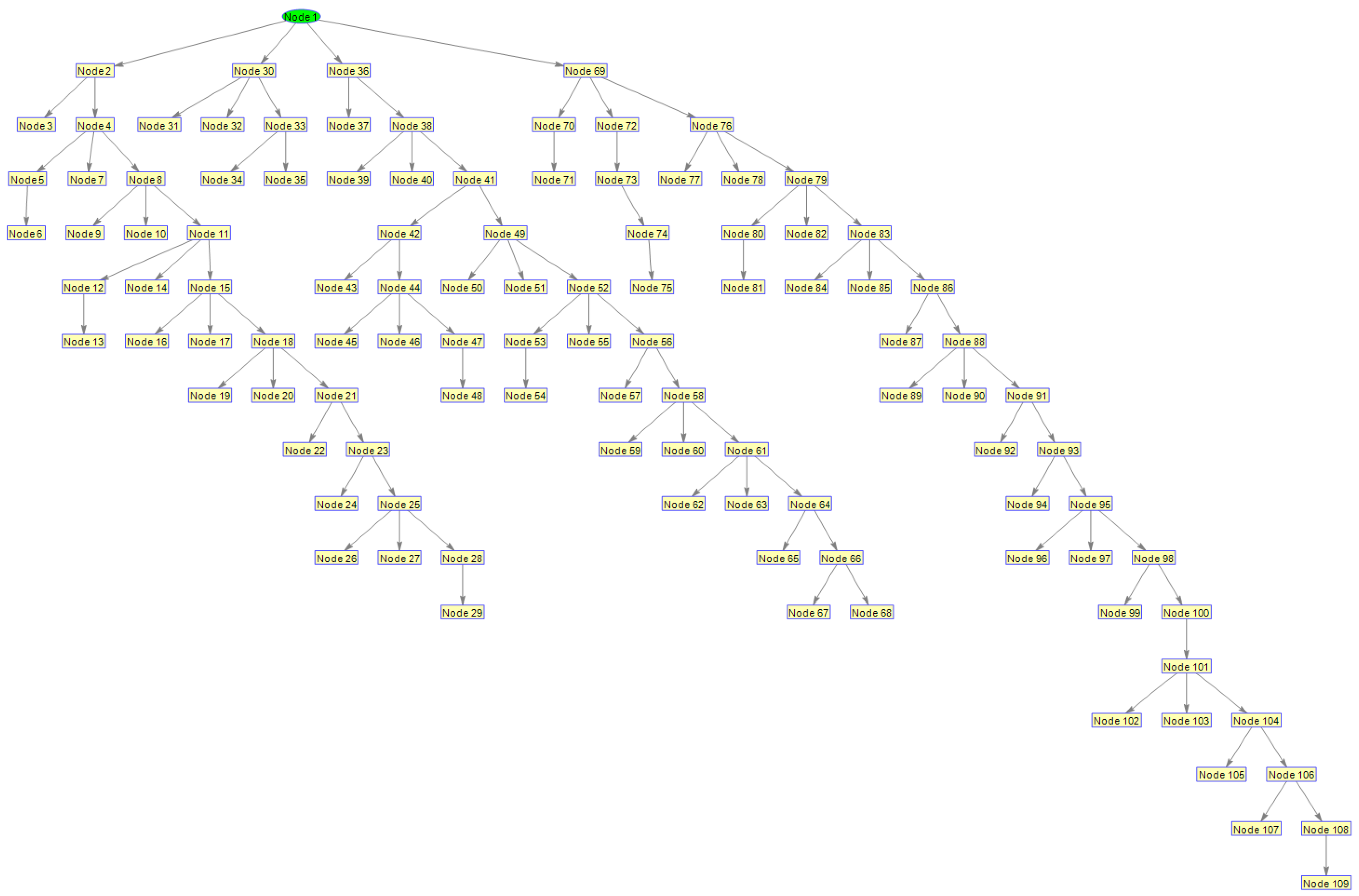
| Extraction of the Loops and the Lines Included in Each Loop | |
|---|---|
| 1: | N = number of tie switches |
| 2: | loop = 1 |
| 3: | For j in range N |
| 4: | Close tie switch j |
| 5: | sj = sectionalizers and tie switch including in the loop j |
| 6: | num_Sj = number of sectionalizers and tie switch including in the loop j |
| 7: | loop = loop + 1 |
| 8: | Open tie switch n |
| Scenario | Power Losses (MWh) | Loss Reduction% (in Respect to Sc#1) | SD |
|---|---|---|---|
| Sc#1 | 0.1941 | - | - |
| Sc#2 | 0.1639 | 15.49 | 0.020 |
| Power Losses at MV DN (MWh) | Power Losses at LV DN (MWh) | Total Power Losses (MWh) | Total Power Loss Reduction% (in Respect to Sc#A) | Minimum Voltage (p.u.) | |
|---|---|---|---|---|---|
| Sc#A | 34.61 | 6.211 | 40.821 | - | 0.387 |
| Sc#B | 22.97 | 5.246 | 28.216 | 30.88 | 0.610 |
| Sc#C | 11.701 | 6.211 | 17.912 | 56.12 | 0.815 |
| Sc#D | 9.598 | 5.246 | 14.843 | 63.64 | 0.864 |
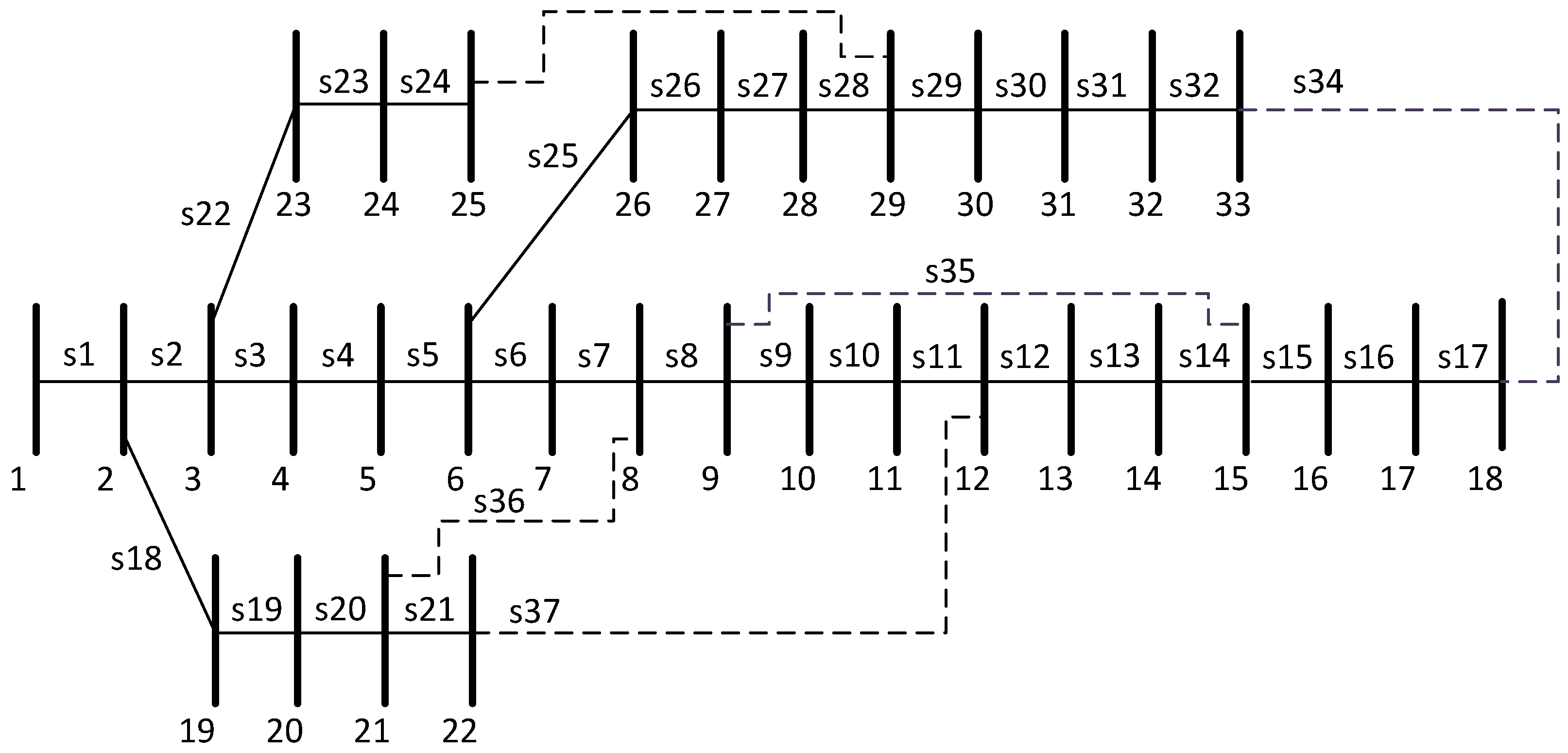
| Open Sectionalizers/Tie Switches | |
|---|---|
| Sc#A | s30, s31, s32, s33, s34 |
| Sc#B | s30, s31, s32, s33, s34 |
| Sc#C | s9, s14, s17, s25, s31 |
| Sc#D | s9, s14, s17, s25, s31 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kothona, D.; Bouhouras, A.S. A Two-Stage EV Charging Planning and Network Reconfiguration Methodology towards Power Loss Minimization in Low and Medium Voltage Distribution Networks. Energies 2022, 15, 3808. https://doi.org/10.3390/en15103808
Kothona D, Bouhouras AS. A Two-Stage EV Charging Planning and Network Reconfiguration Methodology towards Power Loss Minimization in Low and Medium Voltage Distribution Networks. Energies. 2022; 15(10):3808. https://doi.org/10.3390/en15103808
Chicago/Turabian StyleKothona, Despoina, and Aggelos S. Bouhouras. 2022. "A Two-Stage EV Charging Planning and Network Reconfiguration Methodology towards Power Loss Minimization in Low and Medium Voltage Distribution Networks" Energies 15, no. 10: 3808. https://doi.org/10.3390/en15103808
APA StyleKothona, D., & Bouhouras, A. S. (2022). A Two-Stage EV Charging Planning and Network Reconfiguration Methodology towards Power Loss Minimization in Low and Medium Voltage Distribution Networks. Energies, 15(10), 3808. https://doi.org/10.3390/en15103808