
Force Identification from Vibration Data by Response Surface and Random Forest Regression Algorithms

 ,
,  , and
, and
Abstract
:1. Introduction
2. Theoretical Background
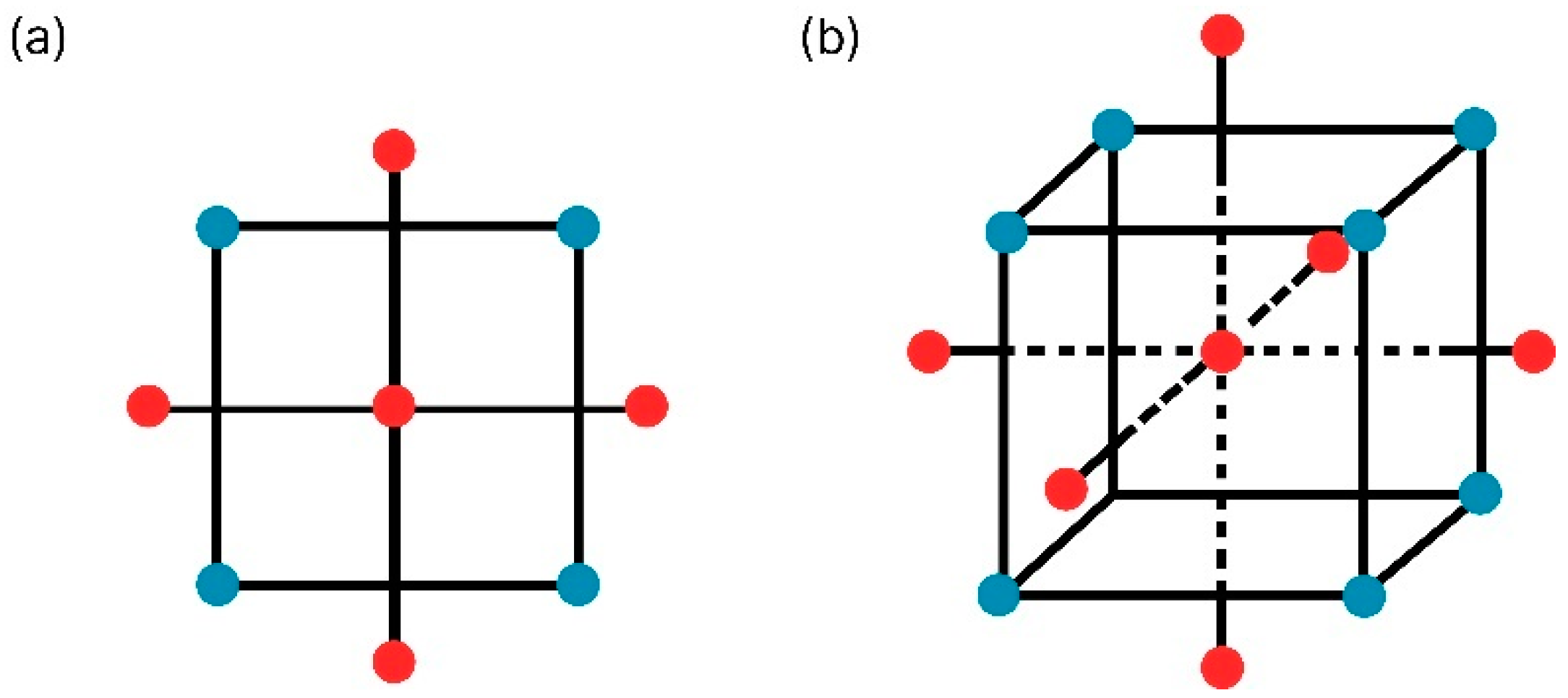
2.1. Design of Experiments
2.2. Response Surface Methodology
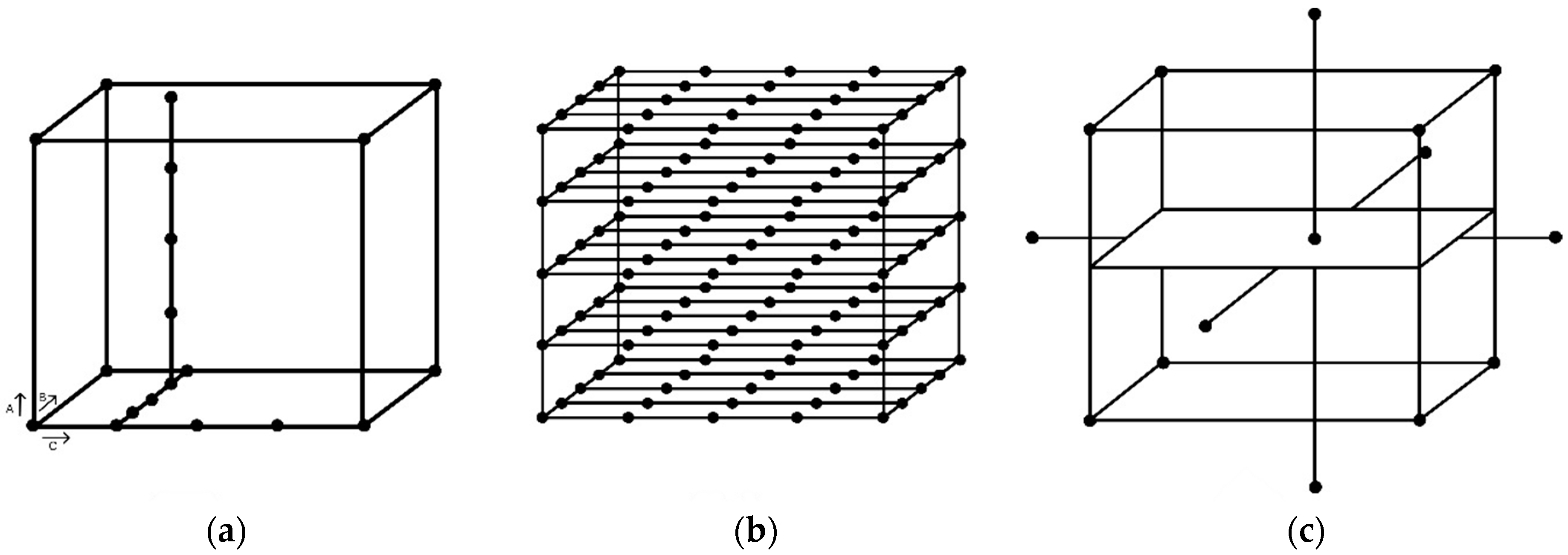
2.3. Central Composite Design
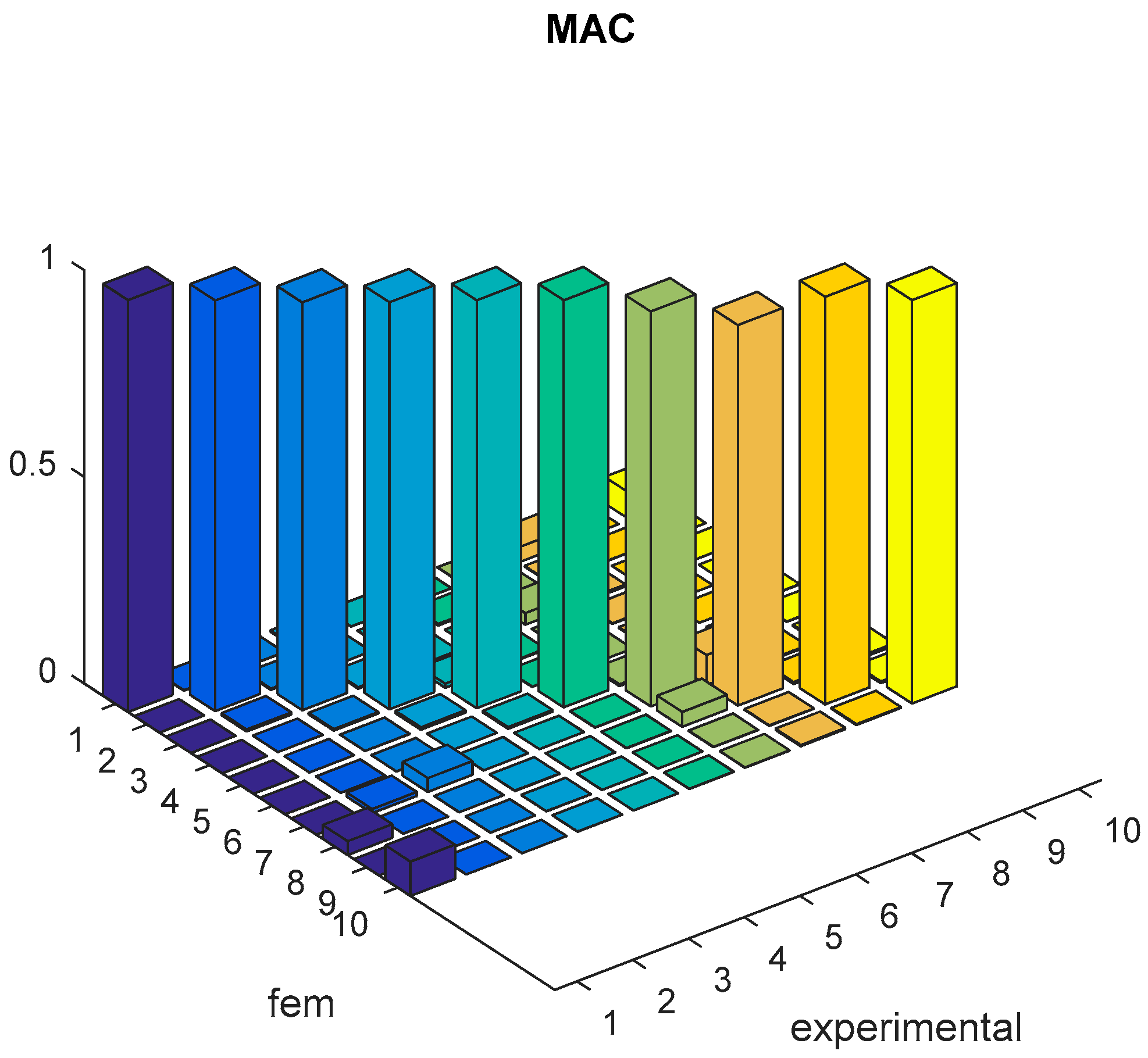
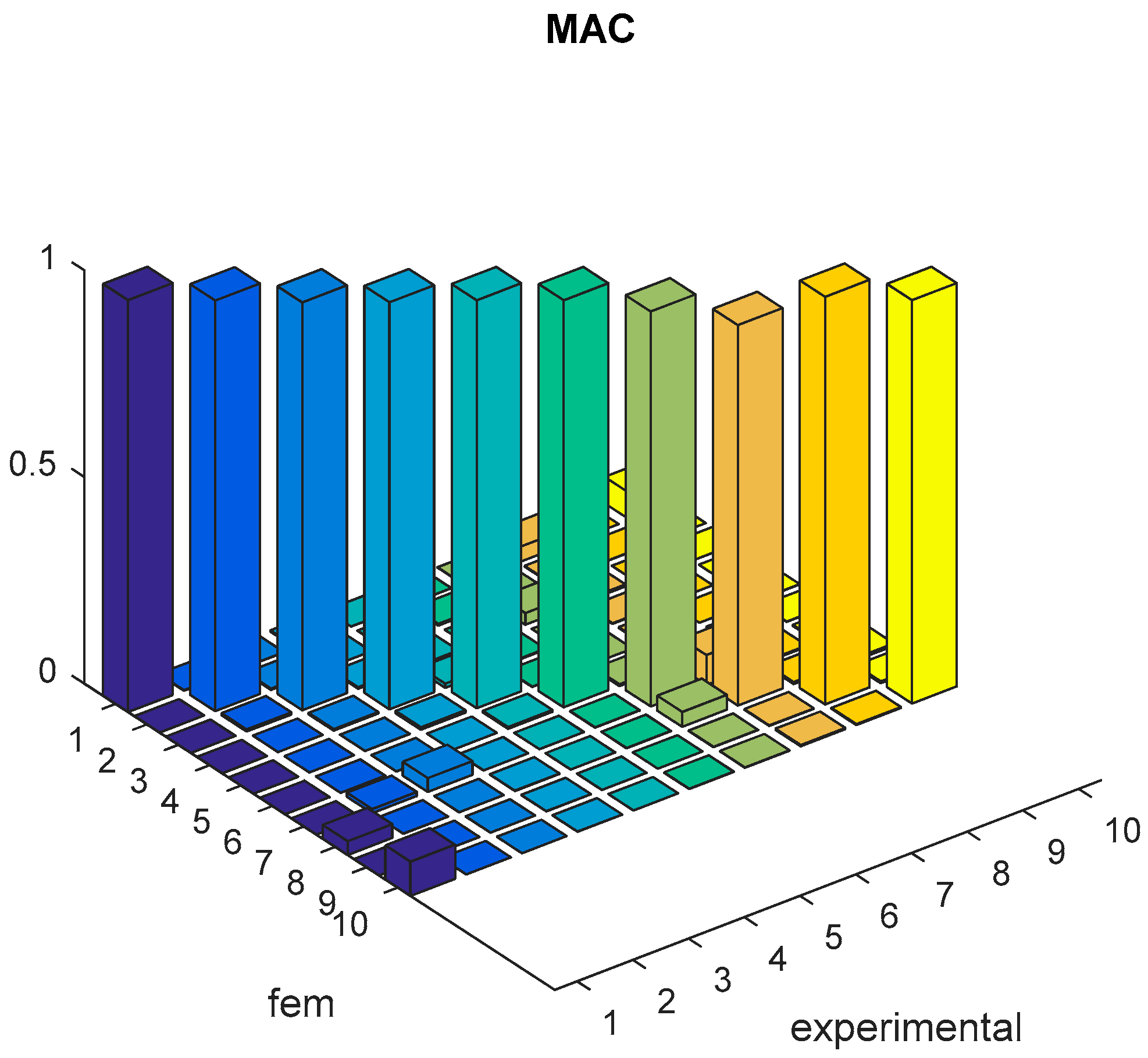
2.4. Correlation between Modal Models
- is the modal vector of the ith mode reference model;
- is the modal vector of the jth mode calculated model.
2.5. Random Forest Regressor
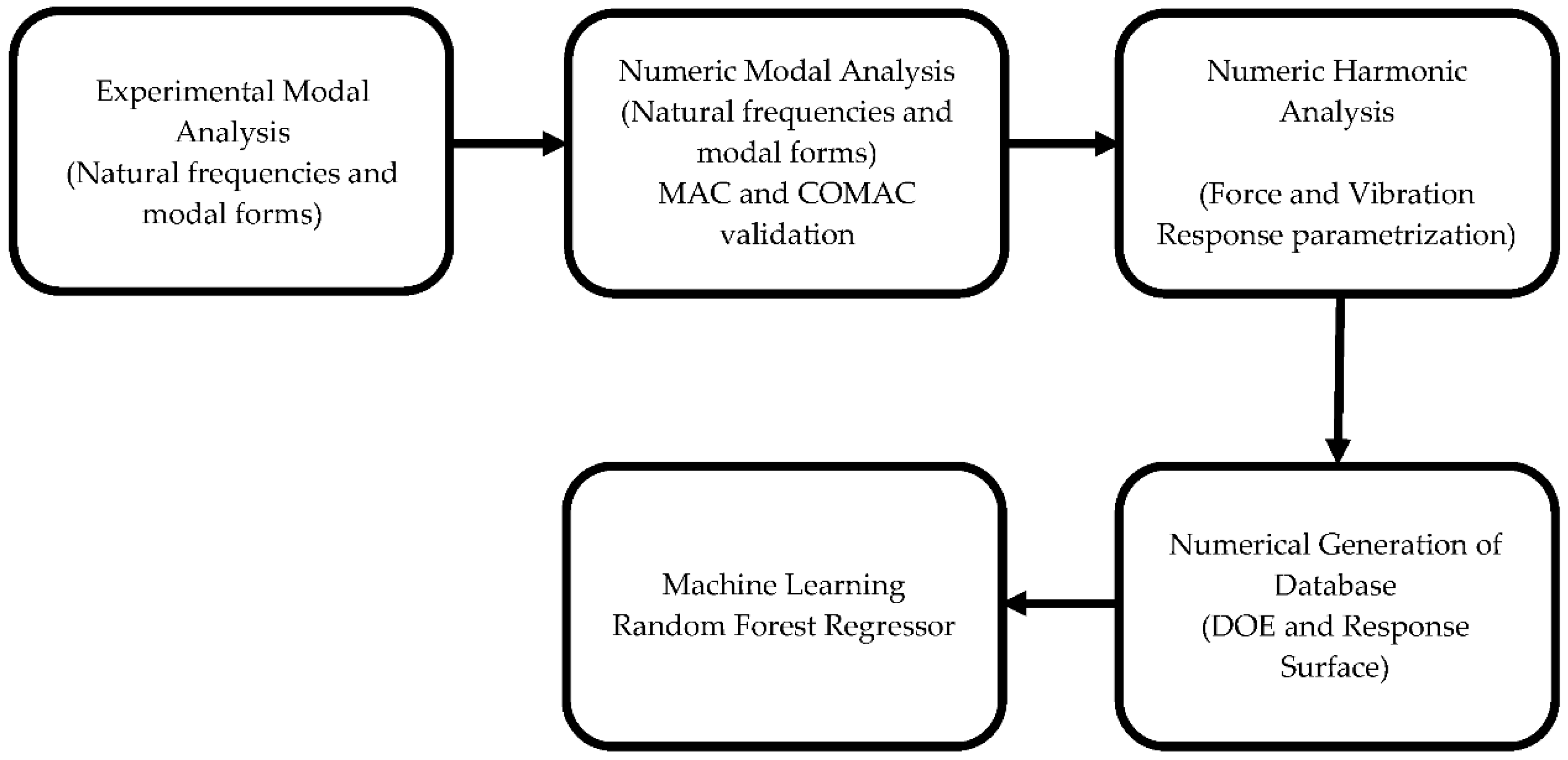
3. Methodology
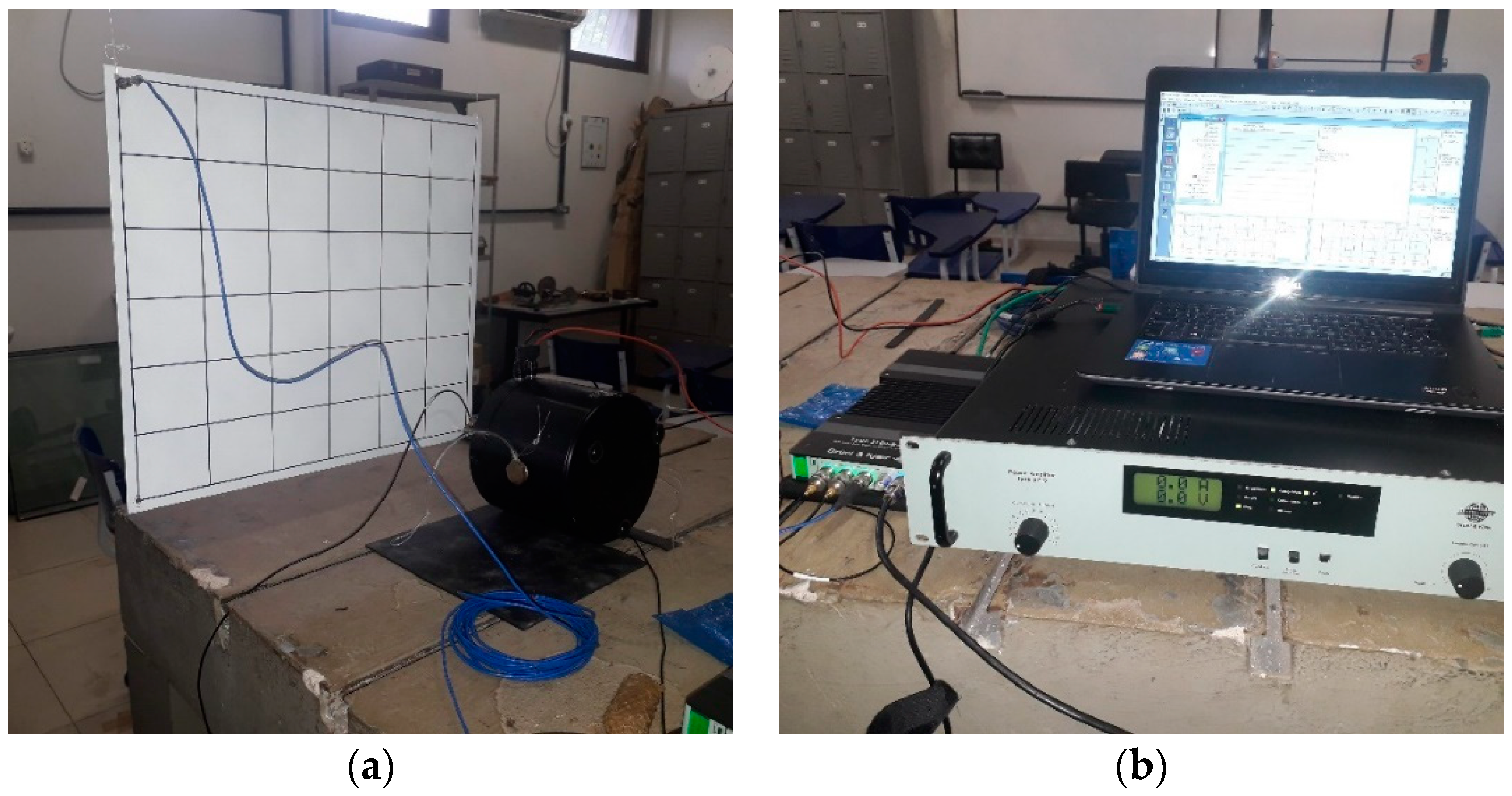
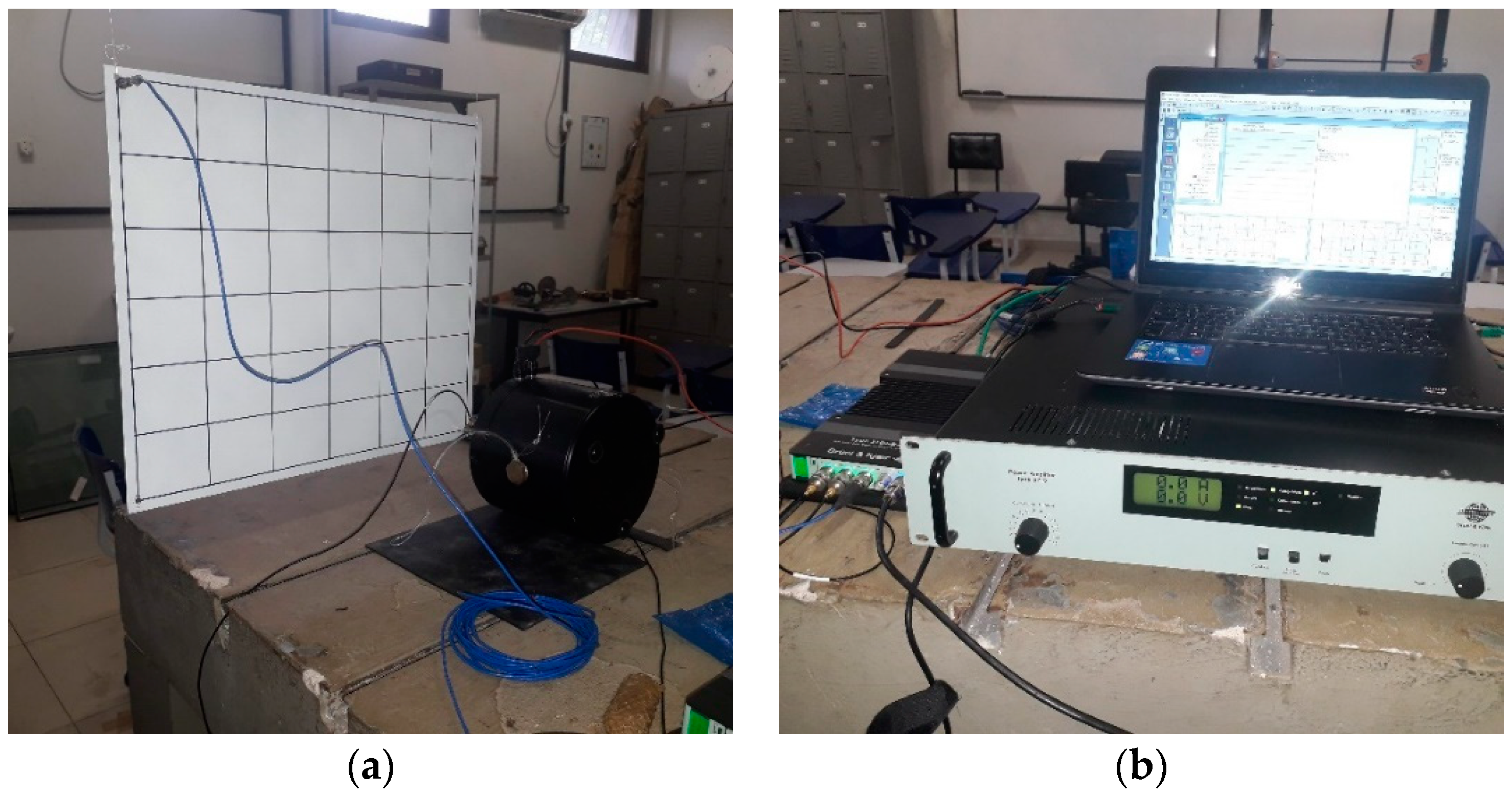
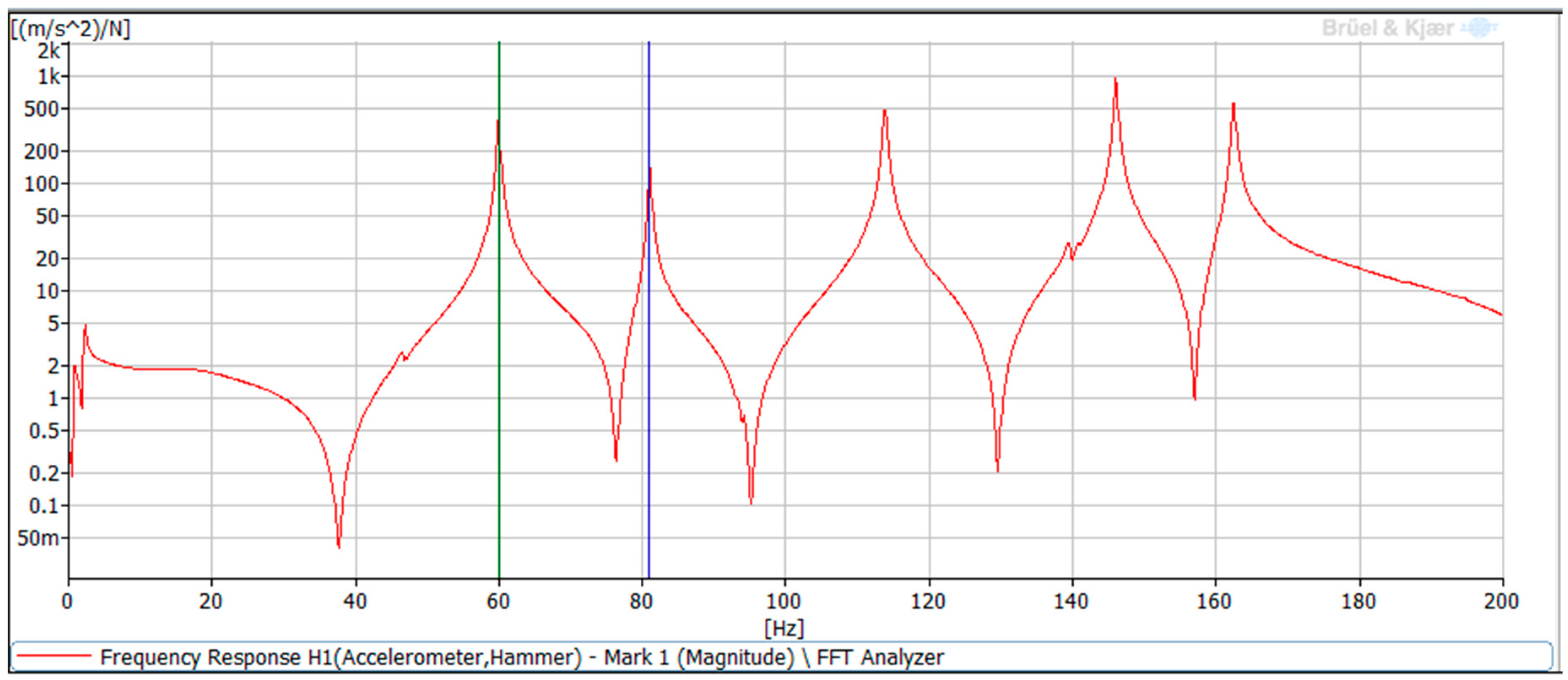
3.1. Experimental Modal Analysis
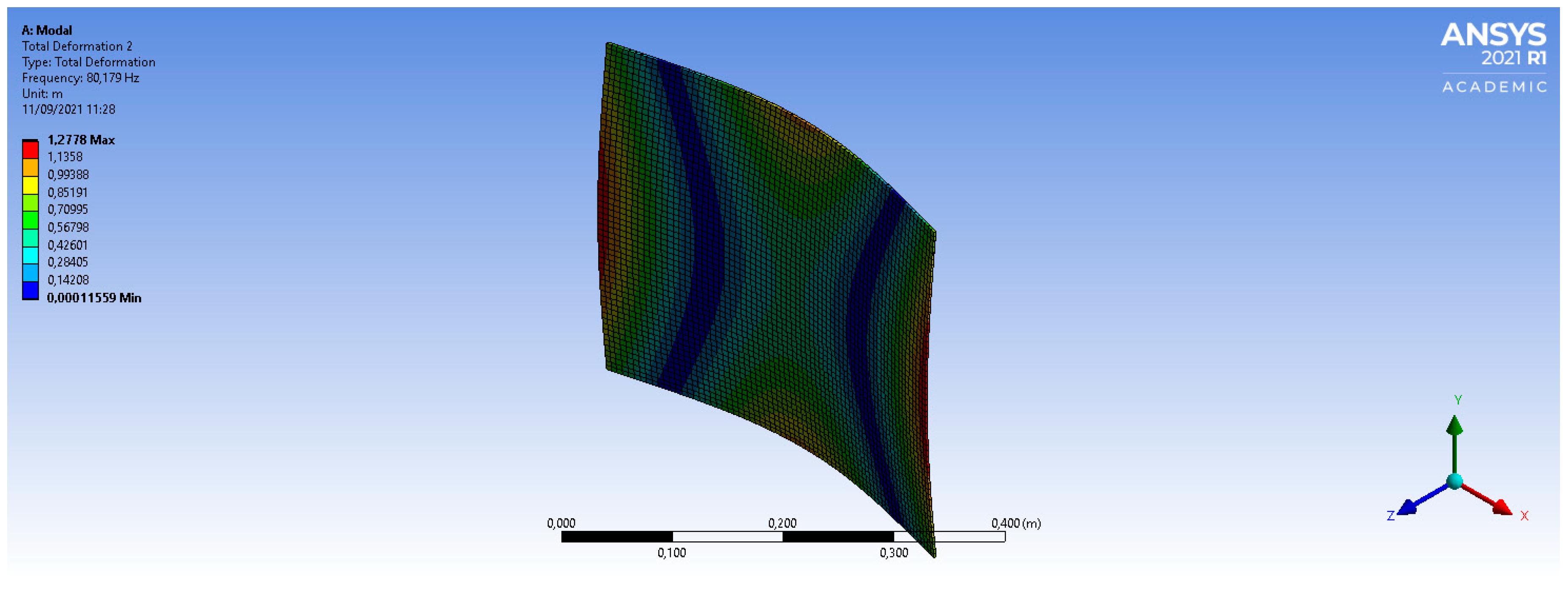
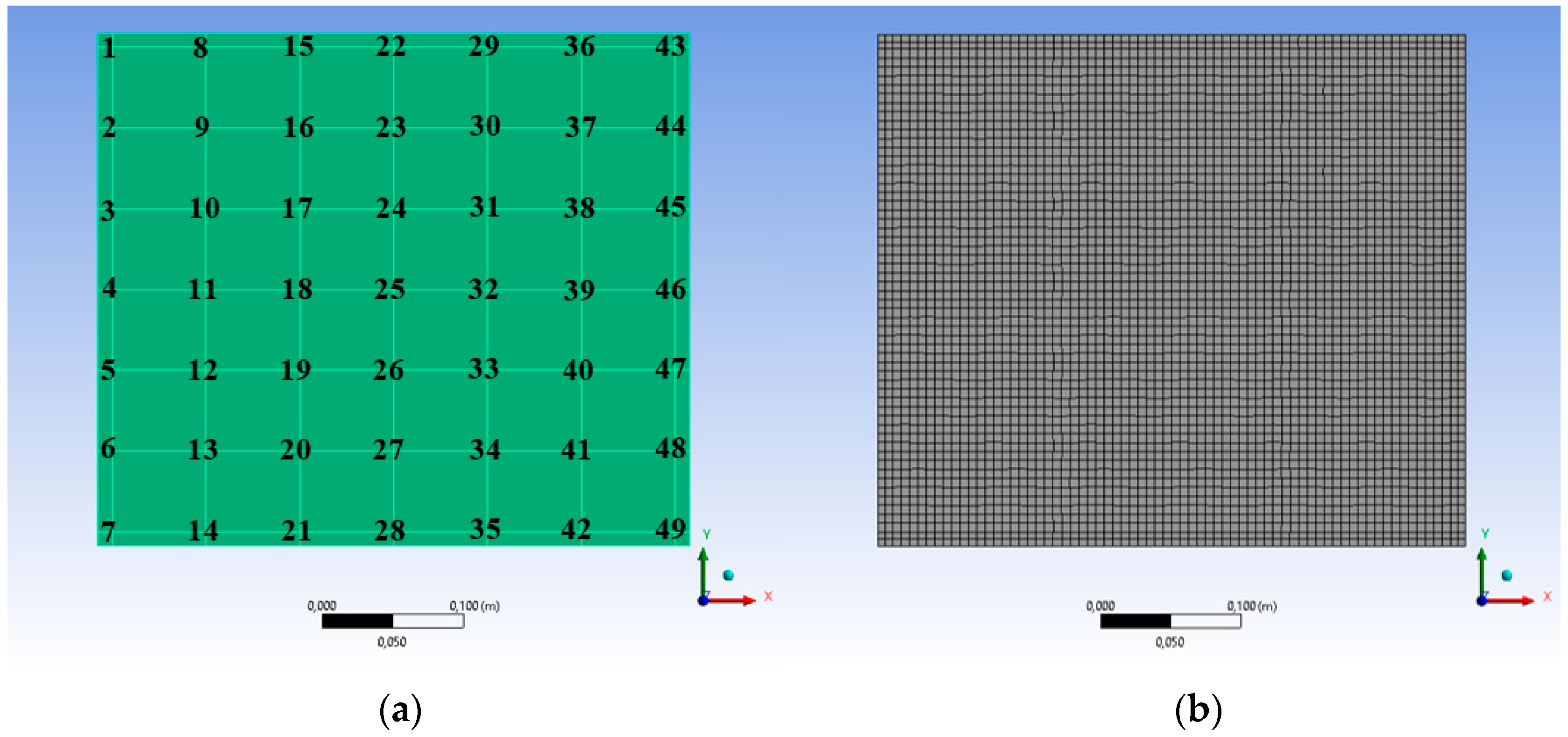
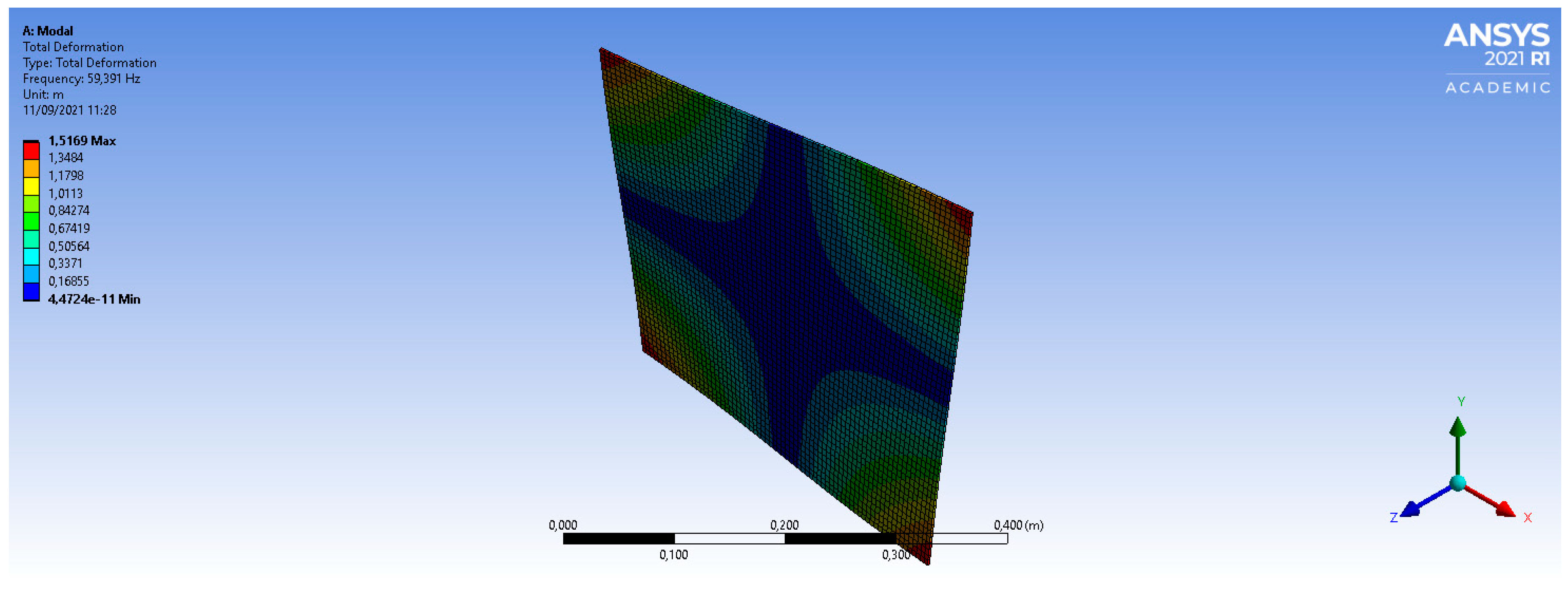
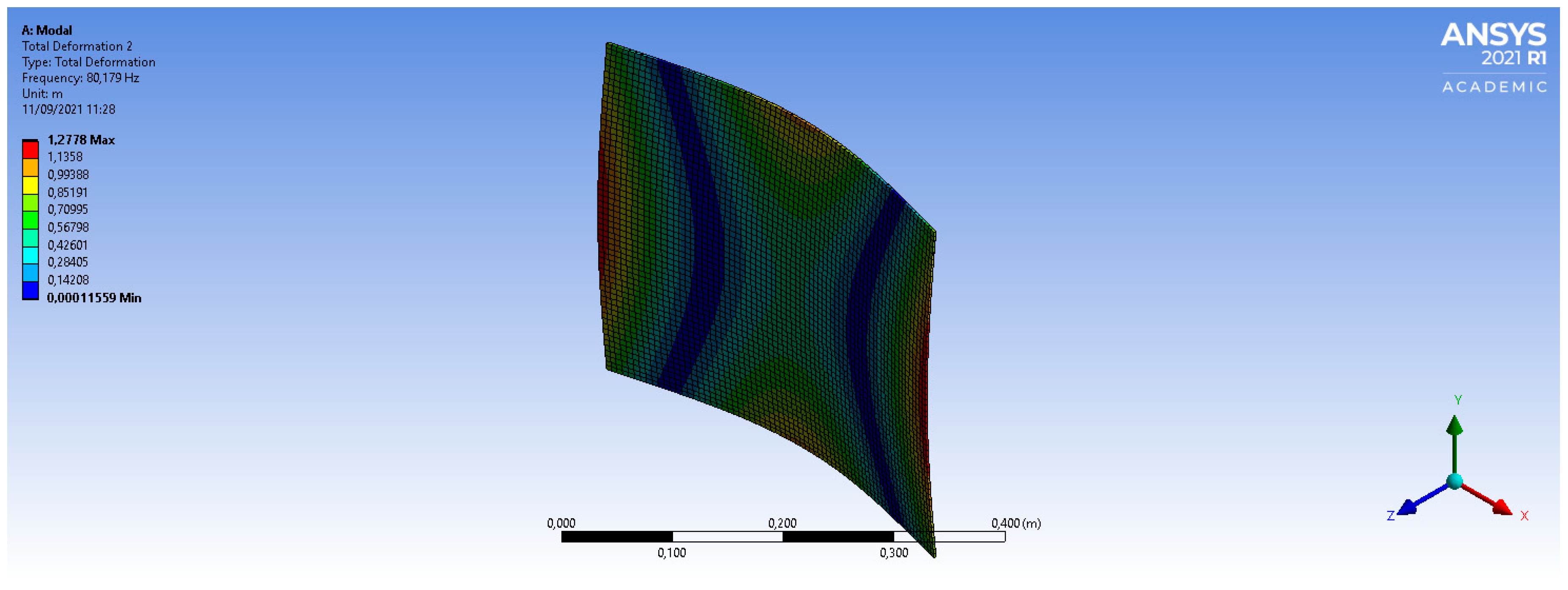
3.2. Numerical Modal Analysis
3.3. Numerical Harmonic Analysis
3.4. Machine Learning Random Forest Regressor
4. Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RSM | Response surface methodology |
| FEM | Finite element method |
| MAC | Modal assurance criterion |
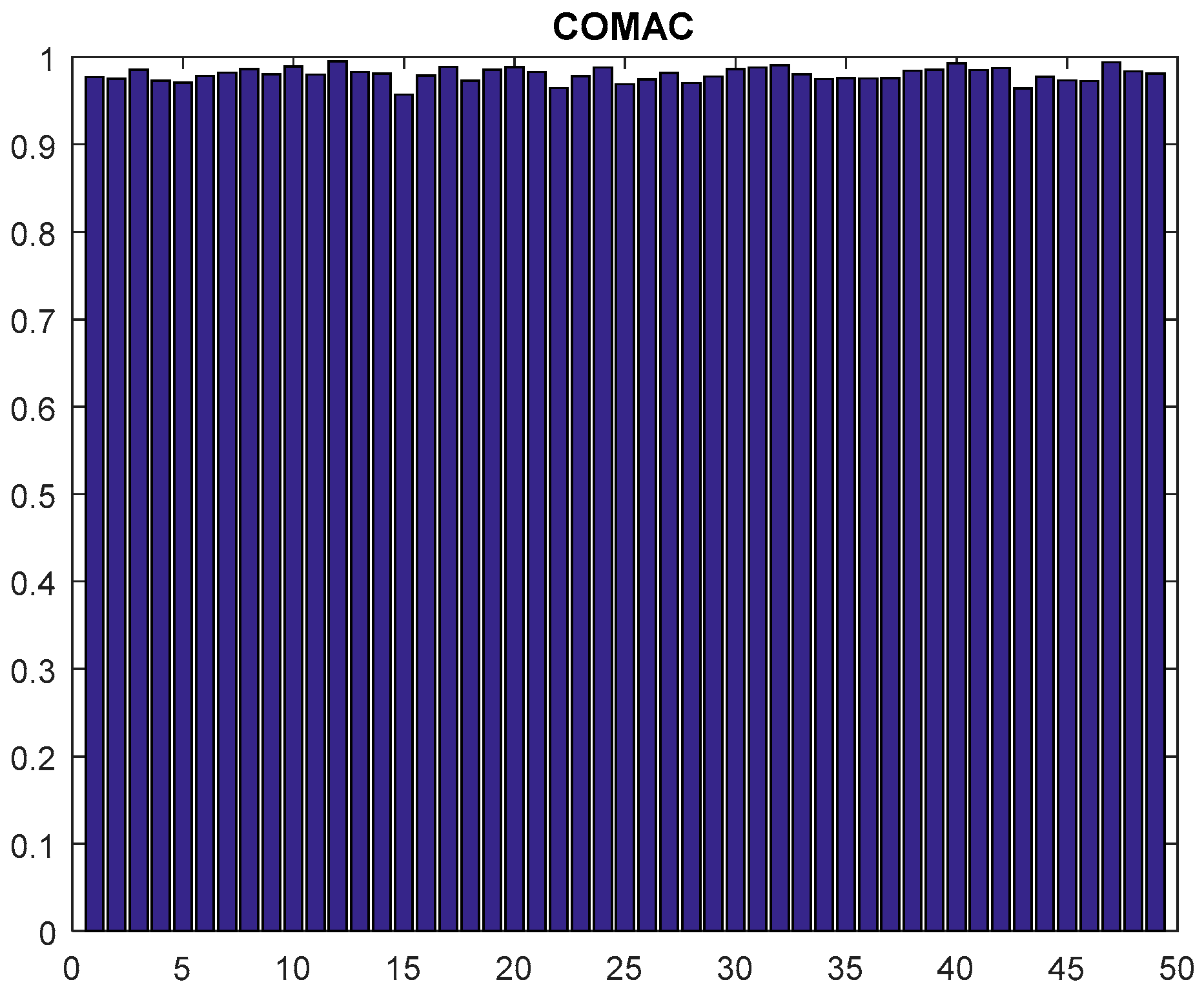
| COMAC | Coordinate modal assurance criterion |
| DOE | Design of experiments |
| CCD | Central composite design |
| EMA | Experimental modal analysis |
| FRF | Frequency response function |
| SISO | Single input single outputs |
| GDL | Degrees of freedoms |
| OOB | Out of bag |
| MAE | Mean absolute error |
References
- Rezayat, A.; Nassiri, V.; de Pauw, B.; Ertveldt, J.; Vanlanduit, S.; Guillaume, P. Identification of Dynamic Forces Using Group-Sparsity in Frequency Domain. Mech. Syst. Signal Processing 2016, 70–71, 756–768. [Google Scholar] [CrossRef]
- Feng, W.; Li, Q.; Lu, Q. Force Localization and Reconstruction Based on a Novel Sparse Kalman Filter. Mech. Syst. Signal Processing 2020, 144, 106890. [Google Scholar] [CrossRef]
- Lin, T.-K.; Liang, J.-C.; Zhou, G.-D.; Yi, T.-H.; Xie, M.-X.; Ciang, C.C.; Lee, J.-R.; Bang, H.-J. Structural Health Monitoring for a Wind Turbine System: A Review of Damage Detection Methods. Meas. Sci. Technol. 2008, 19, 122001. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Ji, S.; Shi, Y.; Zhan, C.; Zhu, L. Investigation on Vibration Source and Transmission Characteristics in Power Transformers. Appl. Acoust. 2019, 151, 99–112. [Google Scholar] [CrossRef]
- Altstadt, E.; Scheffler, M.; Weiss, F.P. Component Vibration of VVER-Reactors—Diagnostics and Modelling. Prog. Nucl. Energy 1995, 29, 129–138. [Google Scholar] [CrossRef]
- Qiao, B.; Chen, X.; Luo, X.; Xue, X. A Novel Method for Force Identification Based on the Discrete Cosine Transform. J. Vib. Acoust. Trans. ASME 2015, 137, 051012. [Google Scholar] [CrossRef]
- Feng, W.; Li, Q.; Lu, Q.; Wang, B.; Li, C. Time Domain Force Localization and Reconstruction Based on Hierarchical Bayesian Method. J. Sound Vib. 2020, 472, 115222. [Google Scholar] [CrossRef]
- Goutaudier, D.; Gendre, D.; Kehr-Candille, V.; Ohayon, R. Single-Sensor Approach for Impact Localization and Force Reconstruction by Using Discriminating Vibration Modes. Mech. Syst. Signal Processing 2020, 138, 106534. [Google Scholar] [CrossRef]
- Lu, Z.R.; Law, S.S. Force Identification Based on Sensitivity in Time Domain. J. Eng. Mech. 2006, 132, 1050–1056. [Google Scholar] [CrossRef]
- Maia, N.M.M.; Lage, Y.E.; Neves, M.M. Recent Advances on Force Identification in Structural Dynamics. Adv. Vib. Eng. Struct. Dyn. 2012, 1, 103–132. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Gong, N.; Xie, K.; Liu, Q. Predicting Gasoline Vehicle Fuel Consumption in Energy and Environmental Impact Based on Machine Learning and Multidimensional Big Data. Energies 2022, 15, 1602. [Google Scholar] [CrossRef]
- Barbaresi, A.; Ceccarelli, M.; Menichetti, G.; Torreggiani, D.; Tassinari, P.; Bovo, M. Application of Machine Learning Models for Fast and Accurate Predictions of Building Energy Need. Energies 2022, 15, 1266. [Google Scholar] [CrossRef]
- Bhushan, S.; Burgreen, G.W.; Brewer, W.; Dettwiller, I.D. Development and Validation of a Machine Learned Turbulence Model. Energy 2021, 14, 1465. [Google Scholar] [CrossRef]
- Almasi, S.; Ghobadian, B.; Najafi, G.H.; Yusaf, T.; Soufi, M.D.; Hoseini, S.S. Optimization of an Ultrasonic-Assisted Biodiesel Production Process from One Genotype of Rapeseed (Teri (OE) R-983) as a Novel Feedstock Using Response Surface Methodology. Energy 2019, 12, 2656. [Google Scholar] [CrossRef] [Green Version]
- Anguebes-Franseschi, F.; Abatal, M.; Bassam, A.; Soberanis, M.A.E.; Tzuc, O.M.; Bucio-Galindo, L.; Quiroz, A.V.C.; Ucan, C.A.A.; Ramirez-Elias, M.A. Esterification Optimization of Crude African Palm Olein Using Response Surface Methodology and Heterogeneous Acid Catalysis. Energy 2018, 11, 157. [Google Scholar] [CrossRef] [Green Version]
- Dang, S.; Peng, L.; Zhao, J.; Li, J.; Kong, Z. A Quantile Regression Random Forest-Based Short-Term Load Probabilistic Forecasting Method. Energy 2022, 15, 663. [Google Scholar] [CrossRef]
- Leo Breiman 17-Random Forest 2001; University of California: Los Angeles, CA, USA, 2001; pp. 1–33.
- Segal, M.R. Machine Learning Benchmarks and Random Forest Regression. UCSF Recent Work Title. 2003. Available online: https://escholarship.org/uc/item/35x3v9t4 (accessed on 7 March 2022).
- Johansson, U.; Boström, H.; Löfström, T.; Linusson, H. Regression Conformal Prediction with Random Forests. In Proceedings of the Machine Learning; Kluwer Academic Publishers: Norwell, MA, USA, 2014; Volume 97, pp. 155–176. [Google Scholar]
- Randall, J. Allemang 14-The Modal Assurance Criterion Twenty Years of Use and Abuse. Sound Vib. 2003, 37, 14–21. [Google Scholar]
- Woo, S.; Vacca, A. An Investigation of the Vibration Modes of an External Gear Pump through Experiments and Numerical Modeling. Energy 2022, 15, 796. [Google Scholar] [CrossRef]
- Henkel, M.; Weijtjens, W.; Devriendt, C. Fatigue Stress Estimation for Submerged and Sub-Soil Welds of Offshore Wind Turbines on Monopiles Using Modal Expansion. Energy 2021, 14, 7576. [Google Scholar] [CrossRef]
- Dziedziech, K.; Mendrok, K.; Kurowski, P.; Barszcz, T. Multi-Variant Modal Analysis Approach for Large Industrial Machine. Energies 2022, 15, 1871. [Google Scholar] [CrossRef]
- Najafi, B.; Ardabili, S.F.; Mosavi, A.; Shamshirband, S.; Rabczuk, T. An Intelligent Artificial Neural Network-Response Surface Methodology Method for Accessing the Optimum Biodiesel and Diesel Fuel Blending Conditions in a Diesel Engine from the Viewpoint of Exergy and Energy Analysis. Energy 2018, 11, 860. [Google Scholar] [CrossRef] [Green Version]
- Box, G.E.P.; Wilson, K.B. On the Experimental Attainment of Optimum Conditions. J. R. Stat. Soc. Ser. B (Methodol.) 1951, 13, 1–38. [Google Scholar] [CrossRef]
- Haaland, P.D. Experimental Design in Biotechnology; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar] [CrossRef]
- Jo, S.T.; Shin, H.S.; Lee, Y.G.; Lee, J.H.; Choi, J.Y. Optimal Design of a BLDC Motor Considering Three-Dimensional Structures Using the Response Surface Methodology. Energy 2022, 15, 461. [Google Scholar] [CrossRef]
- Costarrosa, L.; Leiva-Candia, D.E.; Cubero-Atienza, A.J.; Ruiz, J.J.; Dorado, M.P. Optimization of the Transesterification of Waste Cooking Oil with Mg-al Hydrotalcite Using Response Surface Methodology. Energy 2018, 11, 302. [Google Scholar] [CrossRef] [Green Version]
- Kaneko, S.; Tomigashi, A.; Ishihara, T.; Shrestha, G.; Yoshioka, M.; Uchida, Y. Proposal for a Method Predicting Suitable Areas for Installation of Ground-Source Heat Pump Systems Based on Response Surface Methodology. Energy 2020, 13, 1872. [Google Scholar] [CrossRef] [Green Version]
- Abdullah, M.F.; Zulkifli, R.; Moria, H.; Najm, A.S.; Harun, Z.; Abdullah, S.; Ghopa, W.A.W.; Sulaiman, N.H. Assessment of Tio2 Nanoconcentration and Twin Impingement Jet of Heat Transfer Enhancement—A Statistical Approach Using Response Surface Methodology. Energy 2021, 14, 595. [Google Scholar] [CrossRef]
- Beebe, K.R.; Pell, R.J.; Seasholtz, M.B.; Download Beebe, K.R.; Pell, R.J.; Seasholtz, M.B. Chemometrics: A Practical Guide [PDF]–Sciarium. Available online: https://sciarium.com/file/376960/ (accessed on 7 March 2022).
- Zhao, Z.; Xu, L.; Gao, J.; Xi, L.; Ruan, Q.; Li, Y. Multi-Objective Optimization of Parameters of Channels with Staggered Frustum of a Cone Based on Response Surface Methodology. Energy 2022, 15, 1240. [Google Scholar] [CrossRef]
- Benício de Barros Neto; Ieda Spacino Scarminio; Roy Edward Runs Como Fazer Experimentos 2aed Barros Scarminio Bruns OCR|PDF|Experimento|Estatísticas. Available online: https://pt.scribd.com/doc/153246515/Como-Fazer-Experimentos-2aEd-Barros-Scarminio-Bruns-OCR (accessed on 7 March 2022).
- Shaikh, M.A.H.; Barbé, K. Wiener-Hammerstein System Identification: A Fast Approach Through Spearman Correlation. IEEE Trans. Instrum. Meas. 2019, 68, 1628–1636. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time: 3 min 56 s—With 49 Measurement Points | Time: 1 min 38 s—Reduction to 24 Measurement Points | Time: 56.1 s—Reduction to 12 Measurement Points | ||||||
|---|---|---|---|---|---|---|---|---|
| MAE | R2 | MAE | R2 | MAE | R2 | |||
| Training | 0.034146 | 0.999749 | Training | 0.039241 | 0.999733 | Training | 0.055990 | 0.999635 |
| Test | 0.085874 | 0.998355 | Test | 0.096125 | 0.998335 | Test | 0.145074 | 0.997431 |
| OOB (Test) | 0.092646 | 0.998172 | OOB (Test) | 0.106599 | 0.998049 | OOB (Test) | 0.151995 | 0.997316 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Setúbal, F.A.d.N.; Custódio Filho, S.d.S.; Soeiro, N.S.; Mesquita, A.L.A.; Nunes, M.V.A. Force Identification from Vibration Data by Response Surface and Random Forest Regression Algorithms. Energies 2022, 15, 3786. https://doi.org/10.3390/en15103786
Setúbal FAdN, Custódio Filho SdS, Soeiro NS, Mesquita ALA, Nunes MVA. Force Identification from Vibration Data by Response Surface and Random Forest Regression Algorithms. Energies. 2022; 15(10):3786. https://doi.org/10.3390/en15103786
Chicago/Turabian StyleSetúbal, Fábio Antônio do Nascimento, Sérgio de Souza Custódio Filho, Newton Sure Soeiro, Alexandre Luiz Amarante Mesquita, and Marcus Vinicius Alves Nunes. 2022. "Force Identification from Vibration Data by Response Surface and Random Forest Regression Algorithms" Energies 15, no. 10: 3786. https://doi.org/10.3390/en15103786
APA StyleSetúbal, F. A. d. N., Custódio Filho, S. d. S., Soeiro, N. S., Mesquita, A. L. A., & Nunes, M. V. A. (2022). Force Identification from Vibration Data by Response Surface and Random Forest Regression Algorithms. Energies, 15(10), 3786. https://doi.org/10.3390/en15103786