
Computationally Efficient State-of-Charge Estimation in Li-Ion Batteries Using Enhanced Dual-Kalman Filter †


Abstract
1. Introduction
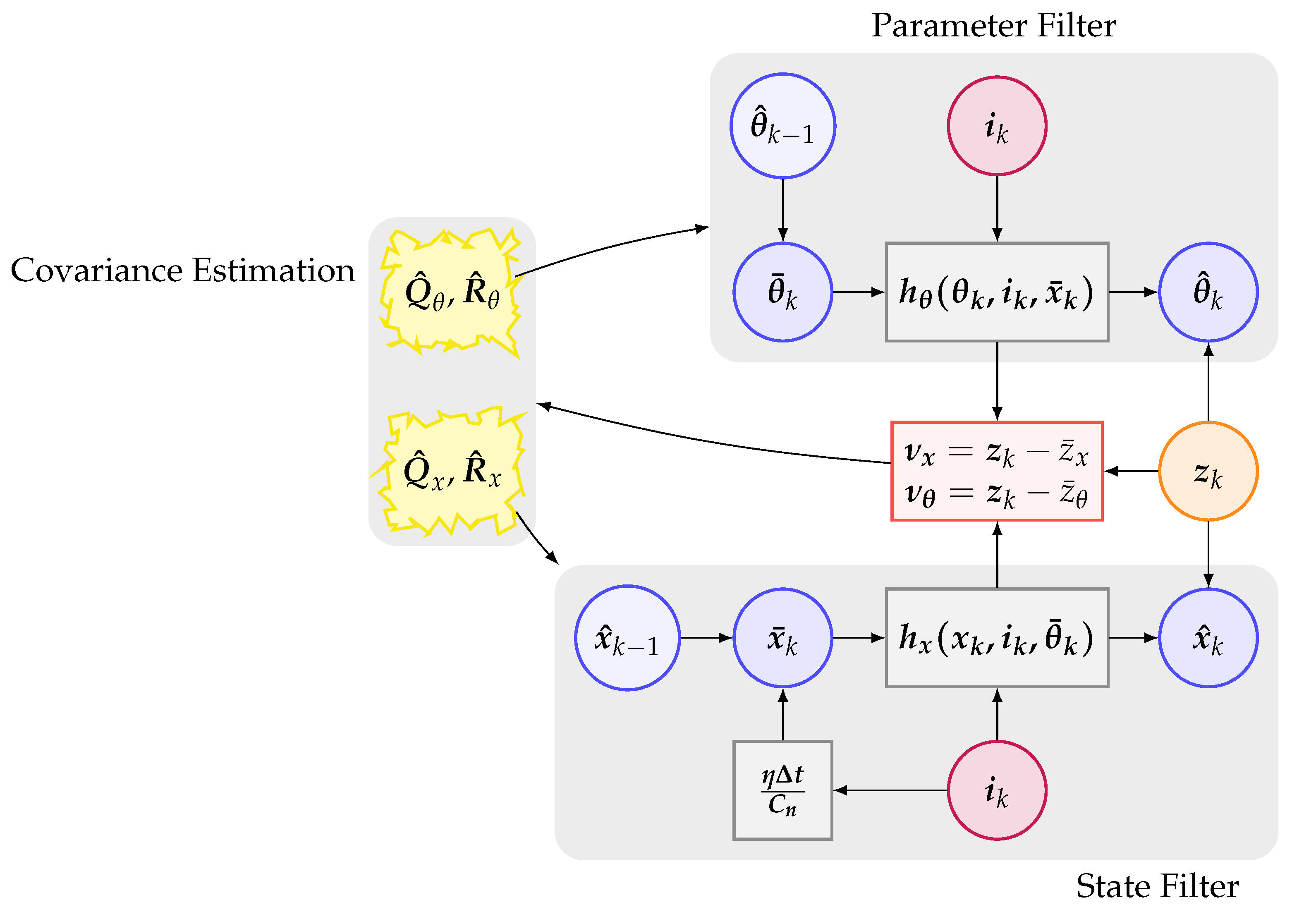
2. Proposed Enhanced Dual-KF Approach
| Algorithm 1: The joint extended Kalman filter. |
 |
| Algorithm 2: The cubature Kalman filter. |
 |
3. Experimental Verification and Discussion
3.1. Test 1: Pulse Tests
3.2. Test 2: Pack DST Test
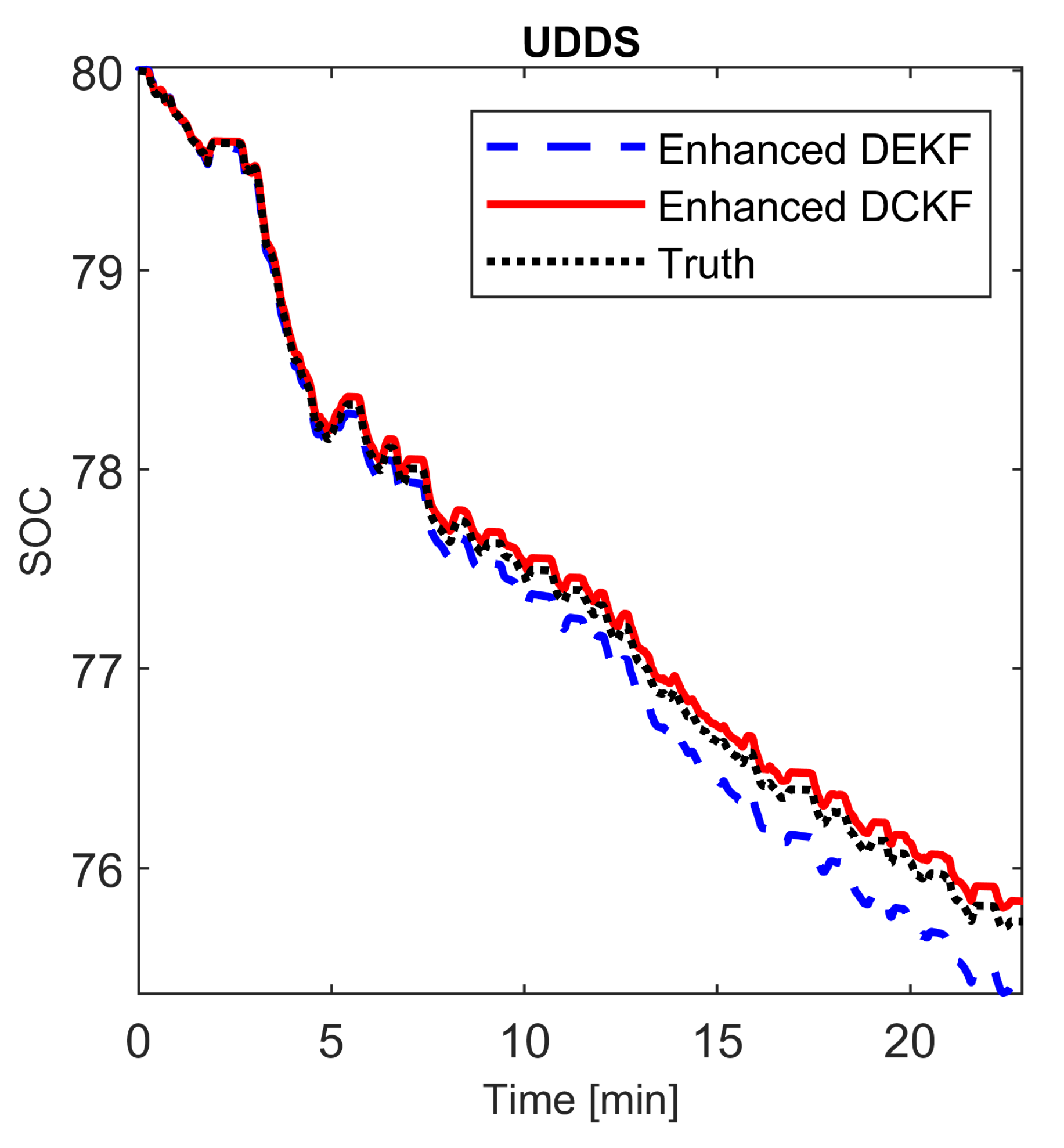
3.3. Test 3: Cell UDDS Test
3.4. Test 4: Cell Constant-Current Discharge Test
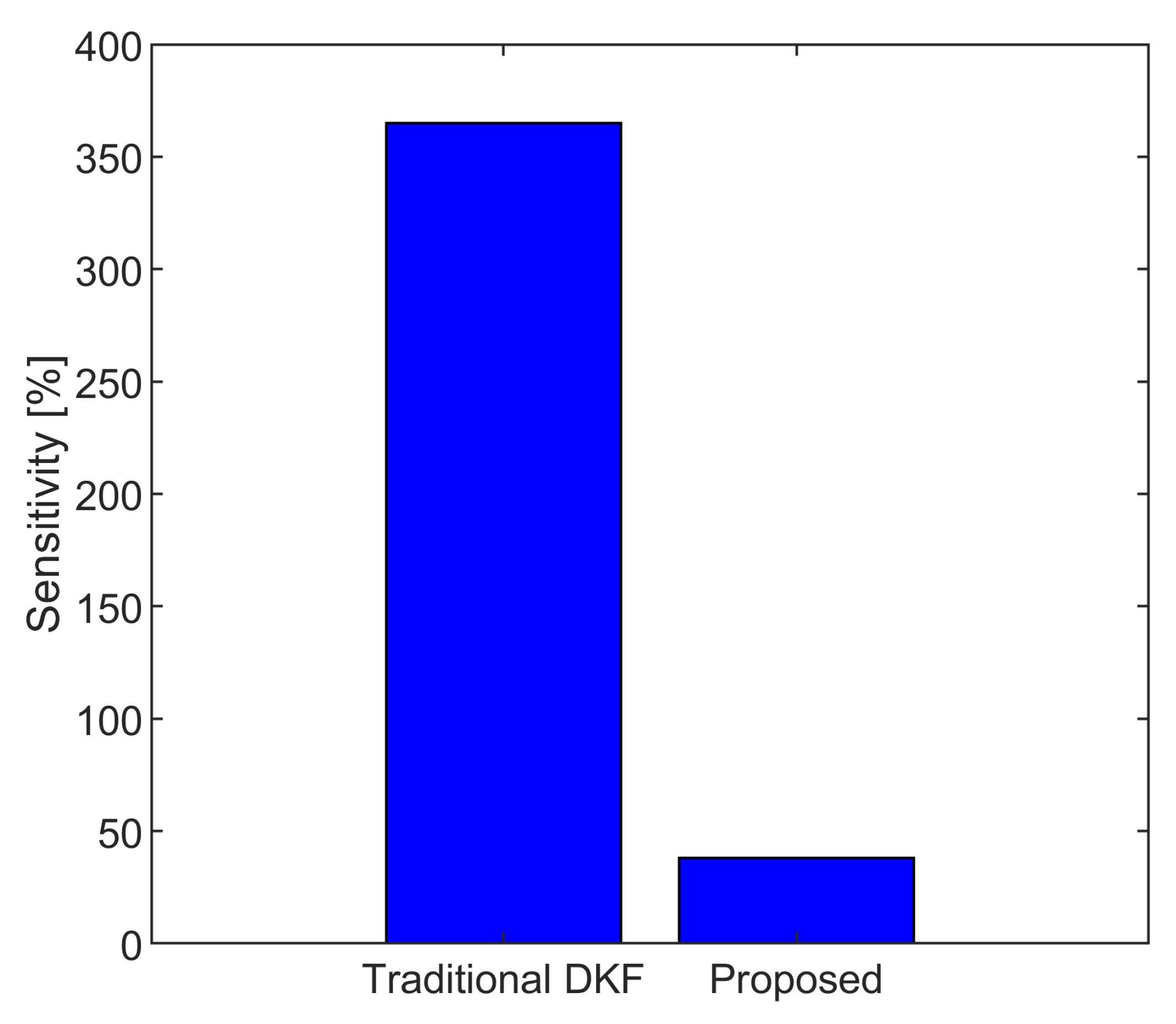
3.5. Note on the Confidence of KF Estimates
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gao, L.; Liu, S.; Dougal, R.A. Dynamic lithium-ion battery model for system simulation. IEEE Trans. Components Packag. Technol. 2002, 25, 495–505. [Google Scholar] [CrossRef]
- Singh, A.; Izadian, A.; Anwar, S. Fault diagnosis of Li-Ion batteries using multiple-model adaptive estimation. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Vienna, Austria, 10–13 November 2013; pp. 3524–3529. [Google Scholar] [CrossRef]
- Chen, M.; Rincón-Mora, G.A. Accurate electrical battery model capable of predicting runtime and I–V performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- Abu-Sharkh, S.; Doerffel, D. Rapid test and non-linear model characterisation of solid-state lithium-ion batteries. J. Power Sources 2004, 130, 266–274. [Google Scholar] [CrossRef]
- Hussein, A.A. Experimental modeling and analysis of lithium-ion battery temperature dependence. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Charlotte, NC, USA, 5–19 March 2015; pp. 1084–1088. [Google Scholar] [CrossRef]
- Hussein, A.A.; Fardoun, A.A.; Stephen, S.S. An Ultrafast Maximum Power Point Tracking Technique for Optimal Battery Charging. IEEE Trans. Sustain. Energy 2017, 8, 1321–1329. [Google Scholar] [CrossRef]
- Hussein, A.A.; Fardoun, A.A.; Stephen, S.S. An online frequency tracking algorithm using terminal voltage spectroscopy for battery optimal charging. IEEE Trans. Sustain. Energy 2016, 7, 32–40. [Google Scholar] [CrossRef]
- He, W.; Pecht, M.; Flynn, D.; Dinmohammadi, F. A Physics-Based Electrochemical Model for Lithium-Ion Battery State-of-Charge Estimation Solved by an Optimised Projection-Based Method and Moving-Window Filtering. Energies 2018, 11, 2120. [Google Scholar] [CrossRef]
- Yang, Z.; Patil, D.; Fahimi, B. Electrothermal Modeling of Lithium-Ion Batteries for Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 170–179. [Google Scholar] [CrossRef]
- Zhou, J.; Xing, B.; Wang, C. A review of lithium ion batteries electrochemical models for electric vehicles. E3S Web Conf. 2020, 185, 04001. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhang, X.; Sun, F.; Fan, J. State-of-charge estimation of the lithium-ion battery using an adaptive extended Kalman filter based on an improved Thevenin model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs—Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, G.; Fang, L. A battery state of charge estimation method with extended Kalman filter. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xi’an, China, 2–5 July 2008; pp. 1008–1013. [Google Scholar] [CrossRef]
- Qiu, S.; Chen, Z.; Masrur, M.A.; Murphey, Y.L. Battery hysteresis modeling for state of charge estimation based on Extended Kalman Filter. In Proceedings of the 2011 6th IEEE Conference on Industrial Electronics and Applications, Beijing, China, 21–23 June 2011; pp. 184–189. [Google Scholar] [CrossRef]
- Di Domenico, D.; Fiengo, G.; Stefanopoulou, A. Lithium-ion Battery state of charge estimation with a Kalman filter based on a electrochemical model. In Proceedings of the IEEE International Conference on Control Applications, San Antonio, TX, USA, 3–5 September 2008; pp. 702–707. [Google Scholar] [CrossRef]
- Yan, W.; Tian-Ming, Y.; Bao-Jie, L. Lead-acid power battery management system basing on Kalman filtering. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008. [Google Scholar] [CrossRef]
- Windarko, N.A.; Choi, J.; Chung, G.B. SOC estimation of LiPB batteries using Extended Kalman Filter based on high accuracy electrical model. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia: “Green World with Power Electronics”, ICPE 2011-ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 2015–2022. [Google Scholar] [CrossRef]
- Wadi, A.; Abdel-Hafez, M.; Hussein, A.A.; Khawaja, F. Alleviating Dynamic Model Uncertainty Effects for Improved Battery SOC Estimation of EVs in Highly Dynamic Environments. IEEE Trans. Veh. Technol. 2021, 70, 6554–6566. [Google Scholar] [CrossRef]
- Partovibakhsh, M.; Liu, G. An adaptive unscented kalman filtering approach for online estimation of model parameters and state-of-charge of lithium-ion batteries for autonomous mobile robots. IEEE Trans. Control. Syst. Technol. 2015, 23, 357–363. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Guo, H. Online estimation of model parameters and state-of-charge of LiFePO4 batteries in electric vehicles. Appl. Energy 2012, 89, 413–420. [Google Scholar] [CrossRef]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium, Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar] [CrossRef]
- Shehab El Din, M.; Abdel-Hafez, M.F.; Hussein, A.A. Enhancement in Li-Ion battery cell state-of-charge estimation under uncertain model statistics. IEEE Trans. Veh. Technol. 2016, 65, 4608–4618. [Google Scholar] [CrossRef]
- Shehab El Din, M.; Hussein, A.A.; Abdel-Hafez, M.F. Improved battery SOC estimation accuracy using a modified UKF with an adaptive cell model under real EV operating conditions. IEEE Trans. Transp. Electrif. 2018, 4, 408–417. [Google Scholar] [CrossRef]
- Wadi, A.; Abdel-Hafez, M.F.; Hussein, A.A. Mitigating the Effect of Noise Uncertainty on the Online State-of-Charge Estimation of Li-Ion Battery Cells. IEEE Trans. Veh. Technol. 2019, 68, 8593–8600. [Google Scholar] [CrossRef]
- Hussein, A.A. Kalman Filters versus Neural Networks in Battery State-of-Charge Estimation: A Comparative Study. Int. J. Mod. Nonlinear Theory Appl. 2014, 3, 199–209. [Google Scholar] [CrossRef][Green Version]
- Chaoui, H.; Ibe-Ekeocha, C.C. State of Charge and State of Health Estimation for Lithium Batteries Using Recurrent Neural Networks. IEEE Trans. Veh. Technol. 2017, 66, 8773–8783. [Google Scholar] [CrossRef]
- Lipu, M.S.; Hannan, M.A.; Hussain, A.; Saad, M.H.; Ayob, A.; Blaabjerg, F. State of Charge Estimation for Lithium-Ion Battery Using Recurrent NARX Neural Network Model Based Lighting Search Algorithm. IEEE Access 2018, 6, 28150–28161. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.; Hussain, A.; Saad, M.H.; Ayob, A. Neural network approach for estimating state of charge of lithium-ion battery using backtracking search algorithm. IEEE Access 2018, 6, 10069–10079. [Google Scholar] [CrossRef]
- Hossain Lipu, M.S.; Hussain, A.; Saad, M.H.; Ayob, A.; Hannan, M.A. Improved recurrent NARX neural network model for state of charge estimation of lithium-ion battery using pso algorithm. In Proceedings of the ISCAIE 2018—2018 IEEE Symposium on Computer Applications and Industrial Electronics, Penang, Malaysia, 28–29 April 2018; pp. 354–359. [Google Scholar] [CrossRef]
- Yu, Z.; Xiao, L.; Li, H.; Zhu, X.; Huai, R. Model Parameter Identification for Lithium Batteries Using the Coevolutionary Particle Swarm Optimization Method. IEEE Trans. Ind. Electron. 2017, 64, 5690–5700. [Google Scholar] [CrossRef]
- Hossain Lipu, M.S.; Hannan, M.A.; Hussain, A.; Saad, M.H.; Ayob, A.; Uddin, M.N. Extreme learning machine model for state-of-charge estimation of lithium-ion battery using gravitational search algorithm. IEEE Trans. Ind. Appl. 2019, 55, 4225–4234. [Google Scholar] [CrossRef]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Emadi, A. State-of-charge estimation of Li-ion batteries using deep neural networks: A machine learning approach. J. Power Sources 2018, 400, 242–255. [Google Scholar] [CrossRef]
- Wadi, A.; Abdel-Hafez, M.F.; Hussein, A.A. Enhanced EKF Method for State-of-Charge Estimation of Electric Vehicles’ Li-ion Batteries under Highly Dynamic Power Profiles. In Proceedings of the 2021 4th International Symposium on Advanced Electrical and Communication Technologies (ISAECT), Alkhobar, Saudi Arabia, 6–8 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Rubagotti, M.; Onori, S.; Rizzoni, G. Automotive Battery Prognostics Using Dual Extended Kalman Filter. In Proceedings of the ASME 2009 Dynamic Systems and Control Conference, Hollywood, CA, USA, 12–14 October 2009. [Google Scholar] [CrossRef]
- Li, S.; Pischinger, S.; He, C.; Liang, L.; Stapelbroek, M. A comparative study of model-based capacity estimation algorithms in dual estimation frameworks for lithium-ion batteries under an accelerated aging test. Appl. Energy 2018, 212, 1522–1536. [Google Scholar] [CrossRef]
- Wu, J.; Jiao, C.; Chen, M.; Chen, J.; Zhang, Z. SOC Estimation of Li-ion Battery by Adaptive Dual Kalman Filter under Typical Working Conditions. In Proceedings of the 2019 IEEE 3rd International Electrical and Energy Conference (CIEEC), Beijing, China, 7–9 September 2019; pp. 1561–1567. [Google Scholar] [CrossRef]
- Wassiliadis, N.; Adermann, J.; Frericks, A.; Pak, M.; Reiter, C.; Lohmann, B.; Lienkamp, M. Revisiting the dual extended Kalman filter for battery state-of-charge and state-of-health estimation: A use-case life cycle analysis. J. Energy Storage 2018, 19, 73–87. [Google Scholar] [CrossRef]
- Zhao, S.; Duncan, S.R.; Howey, D.A. Observability Analysis and State Estimation of Lithium-Ion Batteries in the Presence of Sensor Biases. IEEE Trans. Control. Syst. Technol. 2017, 25, 326–333. [Google Scholar] [CrossRef]
- Haykin, S. Kalman Filtering and Neural Networks; Wiley: New York, NY, USA, 2002. [Google Scholar]
- Collins, J.P.; Langley, R.B. Possible Weighting Schemes for GPS Carrier Phase Observations in the Presence of Multipath; Technical Report; Geodetic Research Laboratory: Fredericton, NB, Canada, 1999. [Google Scholar]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Xia, B.; Wang, H.; Tian, Y.; Wang, M.; Sun, W.; Xu, Z. State of Charge Estimation of Lithium-Ion Batteries Using an Adaptive Cubature Kalman Filter. Energies 2015, 8, 5916–5936. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traditional | Proposed | |||
|---|---|---|---|---|
| DEKF | DCKF | EDEKF | EDCKF | |
| Constant Pulse (Discharging) | 6.81 | 3.67 | 1.00 | 0.97 |
| Variable Pulse (Discharging) | 9.81 | 7.70 | 1.32 | 0.65 |
| Dynamic Stress Test | 15.90 | 7.55 | 0.99 | 0.04 |
| UDDS | 18.61 | 5.32 | 0.15 | 0.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wadi, A.; Abdel-Hafez, M.; Hussein, A.A. Computationally Efficient State-of-Charge Estimation in Li-Ion Batteries Using Enhanced Dual-Kalman Filter. Energies 2022, 15, 3717. https://doi.org/10.3390/en15103717
Wadi A, Abdel-Hafez M, Hussein AA. Computationally Efficient State-of-Charge Estimation in Li-Ion Batteries Using Enhanced Dual-Kalman Filter. Energies. 2022; 15(10):3717. https://doi.org/10.3390/en15103717
Chicago/Turabian StyleWadi, Ali, Mamoun Abdel-Hafez, and Ala A. Hussein. 2022. "Computationally Efficient State-of-Charge Estimation in Li-Ion Batteries Using Enhanced Dual-Kalman Filter" Energies 15, no. 10: 3717. https://doi.org/10.3390/en15103717
APA StyleWadi, A., Abdel-Hafez, M., & Hussein, A. A. (2022). Computationally Efficient State-of-Charge Estimation in Li-Ion Batteries Using Enhanced Dual-Kalman Filter. Energies, 15(10), 3717. https://doi.org/10.3390/en15103717