Advances in Automated Driving Systems



{kind=link}
1. Introduction
- Reliable machine perception; accepted standards for vehicle approval and homologation;
- verification and validation of the functional safety especially at SAE level 3+ systems;
- legal and ethical implications;
- acceptance of vehicle automation by occupants and society;
- interaction between automated- and human-controlled vehicles in mixed traffic;
- human–machine interaction and usability;
- manipulation, misuse and cyber-security;
- but also the system costs for hard- and software and development effort.
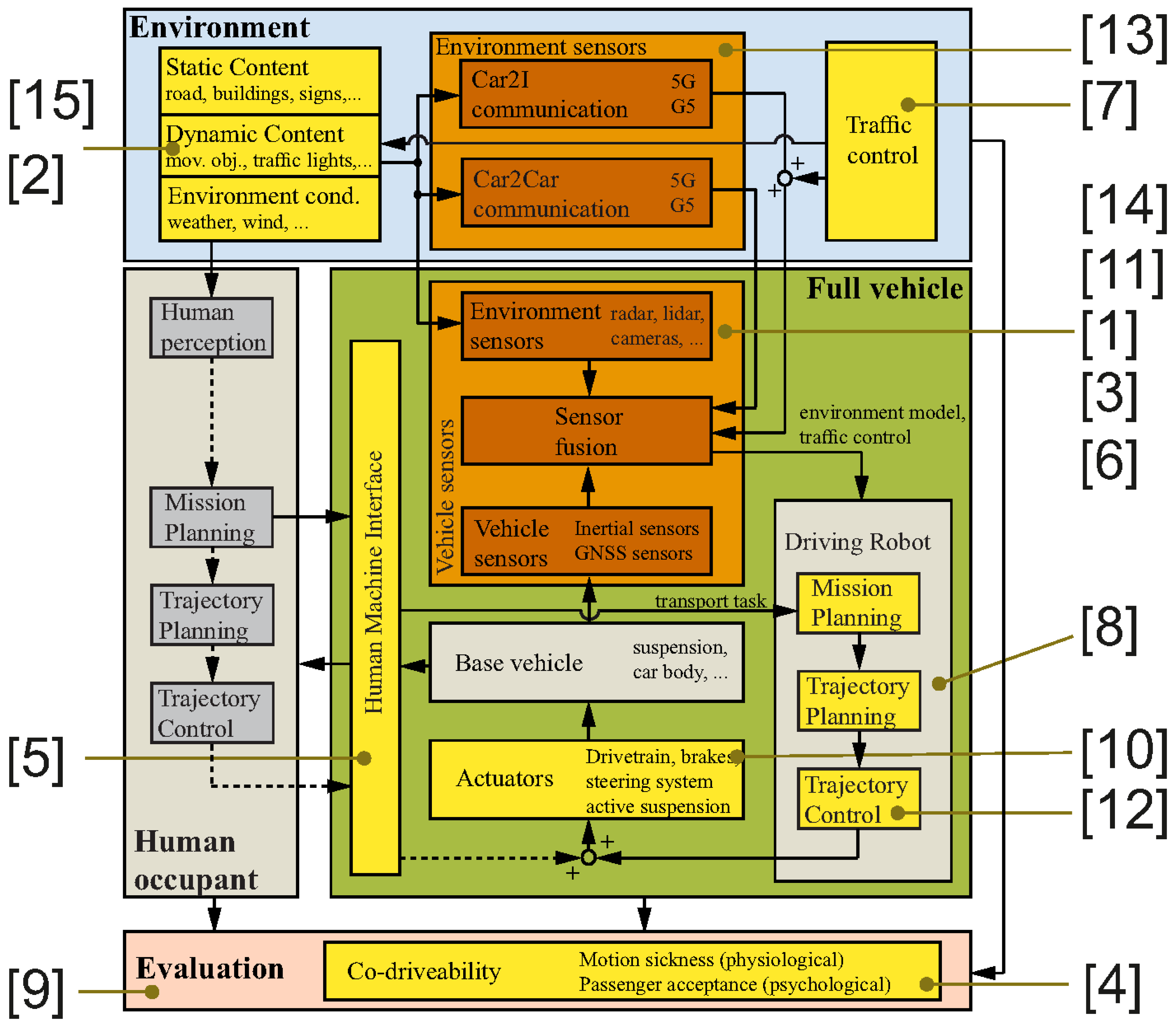
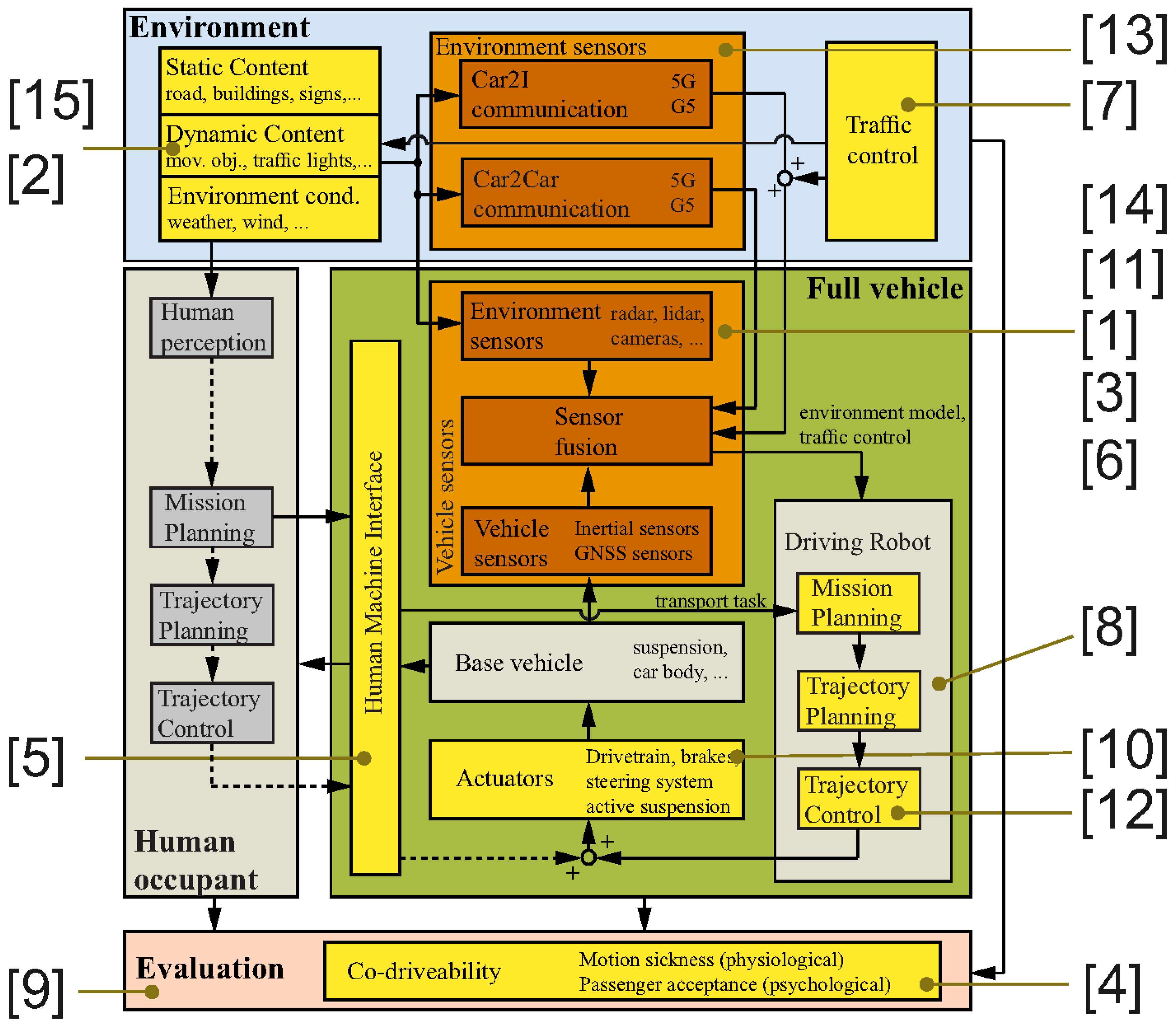
1.1. Environment
1.2. Perception
1.3. Vehicle Guidance
1.4. Base Vehicle
1.5. Human Machine Interface
1.6. Evaluation
2. Articles of the Special Issue
- Machine perception for SAE L3+ driving automation;
- trajectory planning and decision making in complex traffic situations;
- X-by-wire system components;
- verification and validation of SAE L3+ systems;
- misuse, manipulation and cybersecurity;
- human–machine interaction, driver monitoring and driver intention recognition;
- road infrastructure measures for introduction of SAE L3+ systems;
- solutions for interactions of vehicles human and machine controlled in mixed traffic.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Magosi, Z.F.; Wellershaus, C.; Tihanyi, V.R.; Luley, P.; Eichberger, A. Evaluation Methodology for Physical Radar Perception Sensor Models Based on On-Road Measurements for the Testing and Validation of Automated Driving. Energies 2022, 15, 2545. [Google Scholar] [CrossRef]
- Fang, X.; Li, H.; Tettamanti, T.; Eichberger, A.; Fellendorf, M. Effects of Automated Vehicle Models at the Mixed Traffic Situation on a Motorway Scenario. Energies 2022, 15, 2008. [Google Scholar] [CrossRef]
- Holder, M.; Elster, L.; Winner, H. Digitalize the Twin: A Method for Calibration of Reference Data for Transfer Real-World Test Drives into Simulation. Energies 2022, 15, 989. [Google Scholar] [CrossRef]
- Clement, P.; Veledar, O.; Könczöl, C.; Danzinger, H.; Posch, M.; Eichberger, A.; Macher, G. Enhancing Acceptance and Trust in Automated Driving trough Virtual Experience on a Driving Simulator. Energies 2022, 15, 781. [Google Scholar] [CrossRef]
- Arefnezhad, S.; Eichberger, A.; Frühwirth, M.; Kaufmann, C.; Moser, M.; Koglbauer, I.V. Driver Monitoring of Automated Vehicles by Classification of Driver Drowsiness Using a Deep Convolutional Neural Network Trained by Scalograms of ECG Signals. Energies 2022, 15, 480. [Google Scholar] [CrossRef]
- Li, H.; Tarik, K.; Arefnezhad, S.; Magosi, Z.F.; Wellershaus, C.; Babic, D.; Babic, D.; Tihanyi, V.; Eichberger, A.; Baunach, M.C. Phenomenological Modelling of Camera Performance for Road Marking Detection. Energies 2022, 15, 194. [Google Scholar] [CrossRef]
- Sziroczák, D.; Rohács, D. Automated Conflict Management Framework Development for Autonomous Aerial and Ground Vehicles. Energies 2021, 14, 8344. [Google Scholar] [CrossRef]
- Jurj, S.L.; Grundt, D.; Werner, T.; Borchers, P.; Rothemann, K.; Möhlmann, E. Increasing the Safety of Adaptive Cruise Control Using Physics-Guided Reinforcement Learning. Energies 2021, 14, 7572. [Google Scholar] [CrossRef]
- Klamann, B.; Winner, H. Comparing Different Levels of Technical Systems for a Modular Safety Approval—Why the State of the Art Does Not Dispense with System Tests Yet. Energies 2021, 14, 7516. [Google Scholar] [CrossRef]
- Huang, J.; Cheng, X.; Shen, Y.; Kong, D.; Wang, J. Deep Learning-Based Prediction of Throttle Value and State for Wheel Loaders. Energies 2021, 14, 7202. [Google Scholar] [CrossRef]
- Junaid, M.; Szalay, Z.; Török, Á. Evaluation of Non-Classical Decision-Making Methods in Self Driving Cars: Pedestrian Detection Testing on Cluster of Images with Different Luminance Conditions. Energies 2021, 14, 7172. [Google Scholar] [CrossRef]
- Czibere, S.; Domina, Á.; Bárdos, Á.; Szalay, Z. Model Predictive Controller Design for Vehicle Motion Control at Handling Limits in Multiple Equilibria on Varying Road Surfaces. Energies 2021, 14, 6667. [Google Scholar] [CrossRef]
- Tihanyi, V.; Rövid, A.; Remeli, V.; Vincze, Z.; Csonthó, M.; Pethő, Z.; Szalai, M.; Varga, B.; Khalil, A.; Szalay, Z. Towards Cooperative Perception Services for ITS: Digital Twin in the Automotive Edge Cloud. Energies 2021, 14, 5930. [Google Scholar] [CrossRef]
- Babić, D.; Babić, D.; Fiolić, M.; Šarić, Ž. Analysis of Market-Ready Traffic Sign Recognition Systems in Cars: A Test Field Study. Energies 2021, 14, 3697. [Google Scholar] [CrossRef]
- Nalic, D.; Pandurevic, A.; Eichberger, A.; Fellendorf, M.; Rogic, B. Software Framework for Testing of Automated Driving Systems in the Traffic Environment of Vissim. Energies 2021, 14, 3135. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eichberger, A.; Szalay, Z.; Fellendorf, M.; Liu, H. Advances in Automated Driving Systems. Energies 2022, 15, 3476. https://doi.org/10.3390/en15103476
Eichberger A, Szalay Z, Fellendorf M, Liu H. Advances in Automated Driving Systems. Energies. 2022; 15(10):3476. https://doi.org/10.3390/en15103476
Chicago/Turabian StyleEichberger, Arno, Zsolt Szalay, Martin Fellendorf, and Henry Liu. 2022. "Advances in Automated Driving Systems" Energies 15, no. 10: 3476. https://doi.org/10.3390/en15103476
APA StyleEichberger, A., Szalay, Z., Fellendorf, M., & Liu, H. (2022). Advances in Automated Driving Systems. Energies, 15(10), 3476. https://doi.org/10.3390/en15103476