
A Scalable Control Strategy for CHB Converters in Photovoltaic Applications

Abstract
:1. Introduction
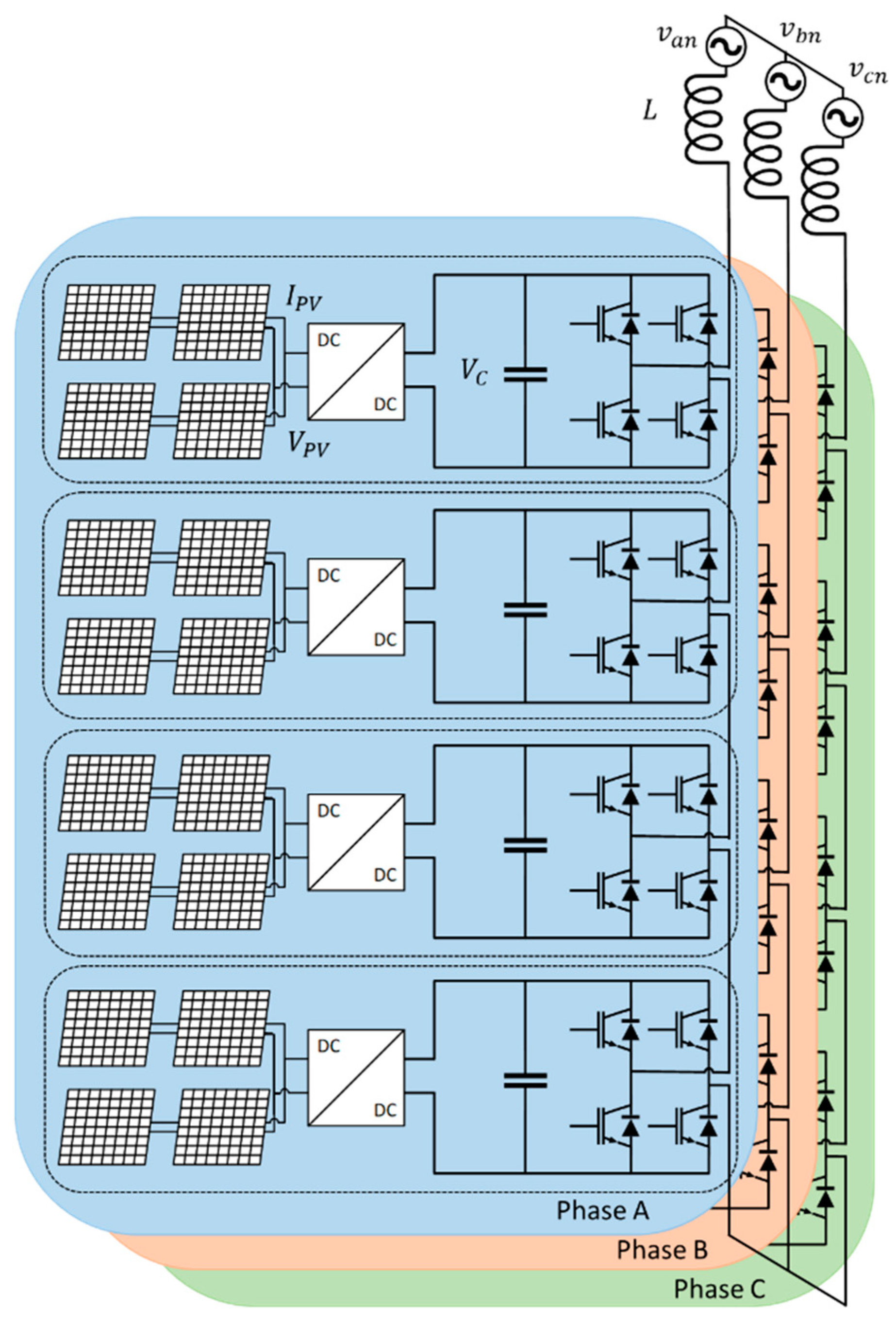
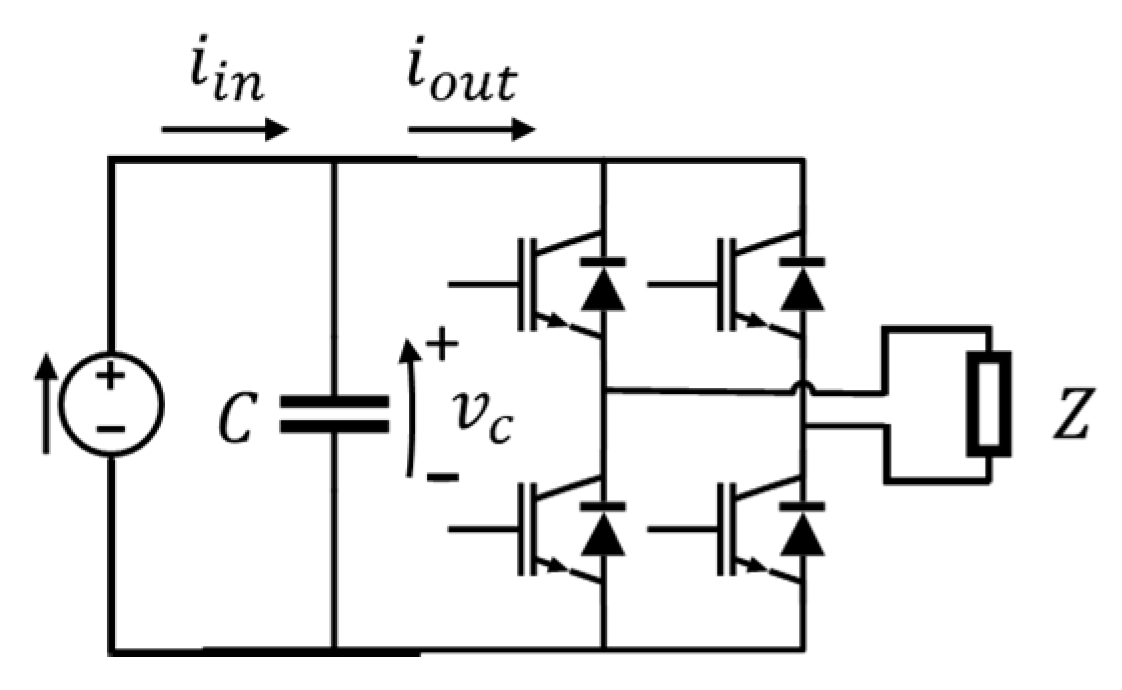
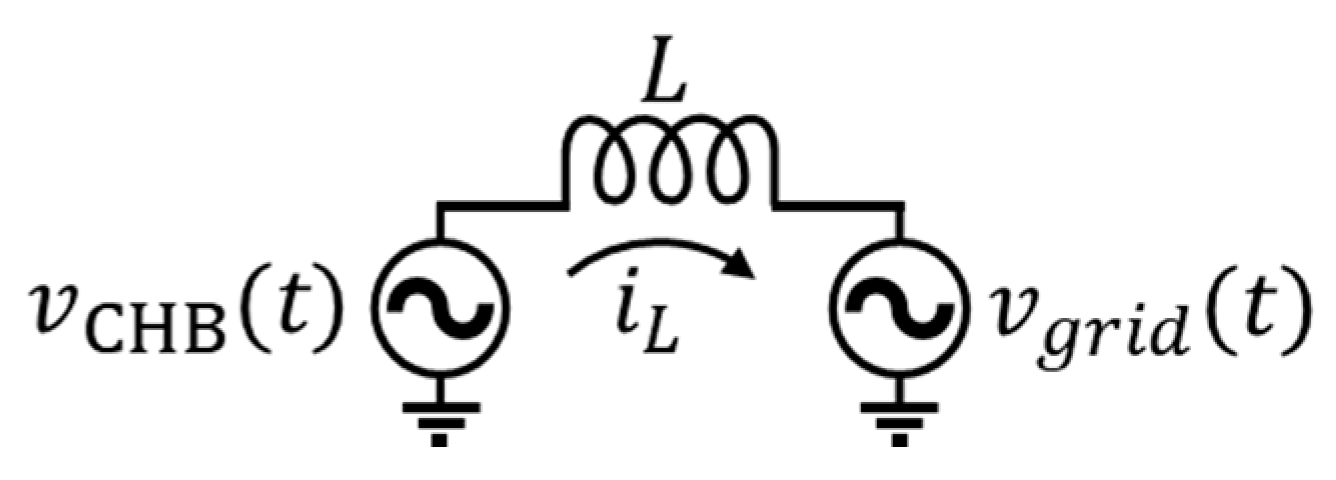
2. System Description
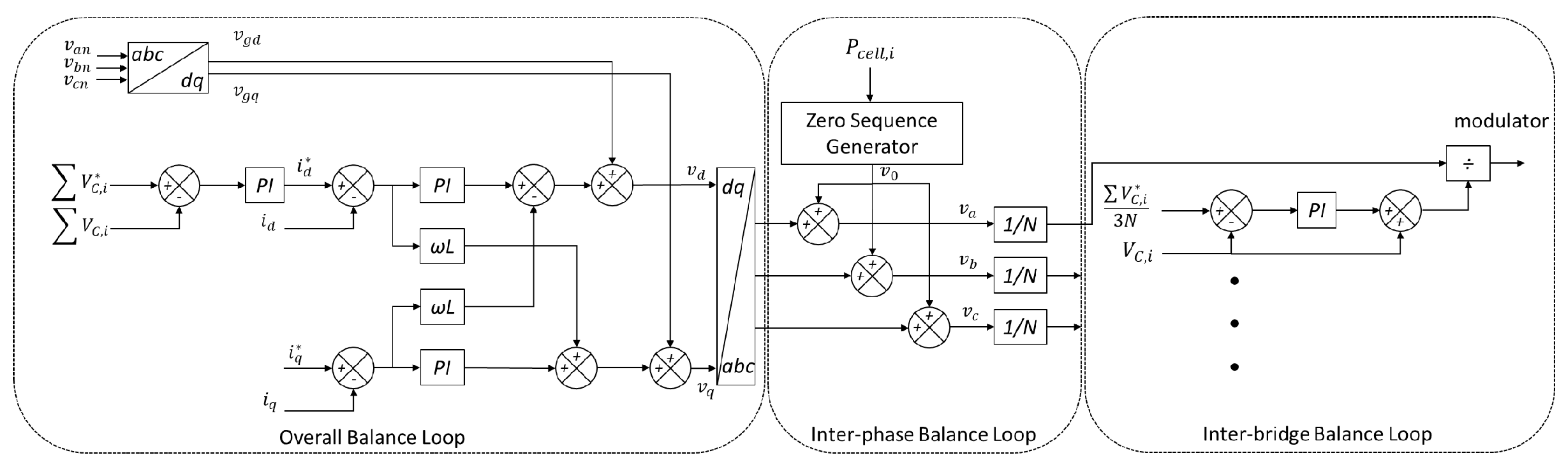
3. Scalable Control Strategy
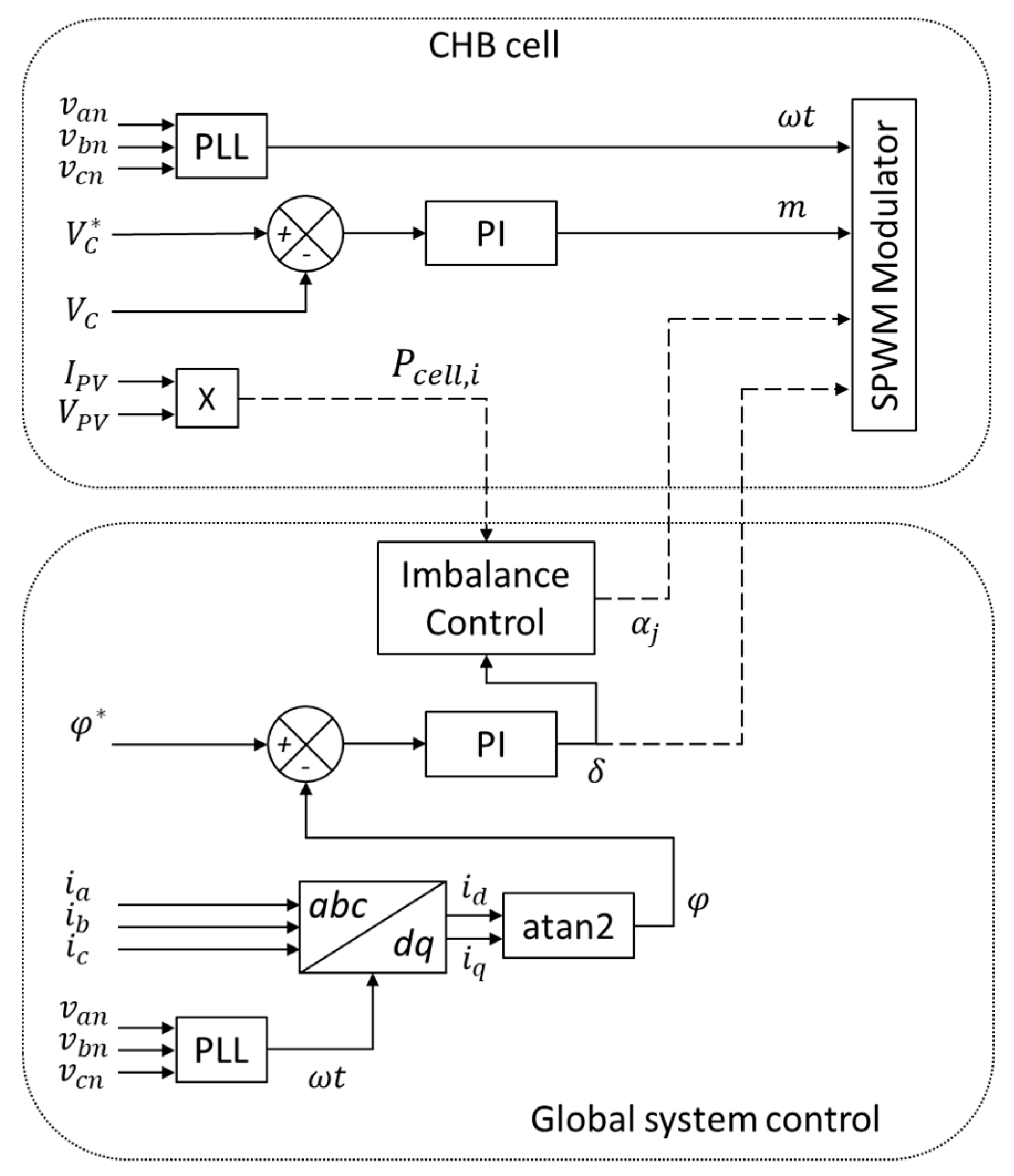
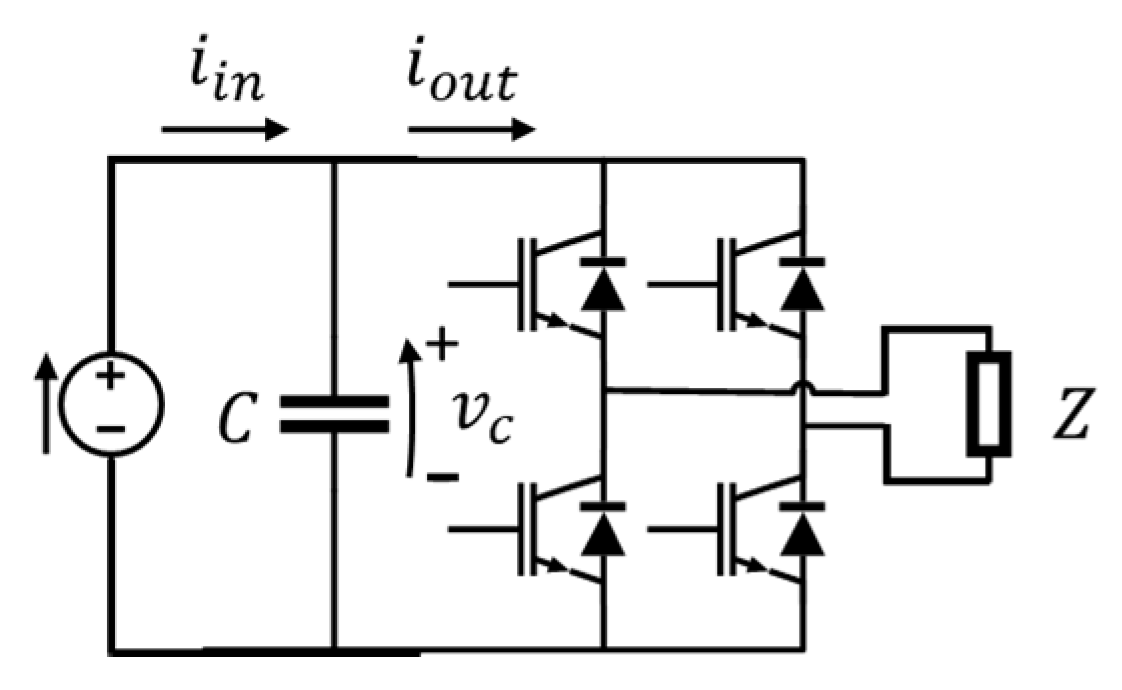
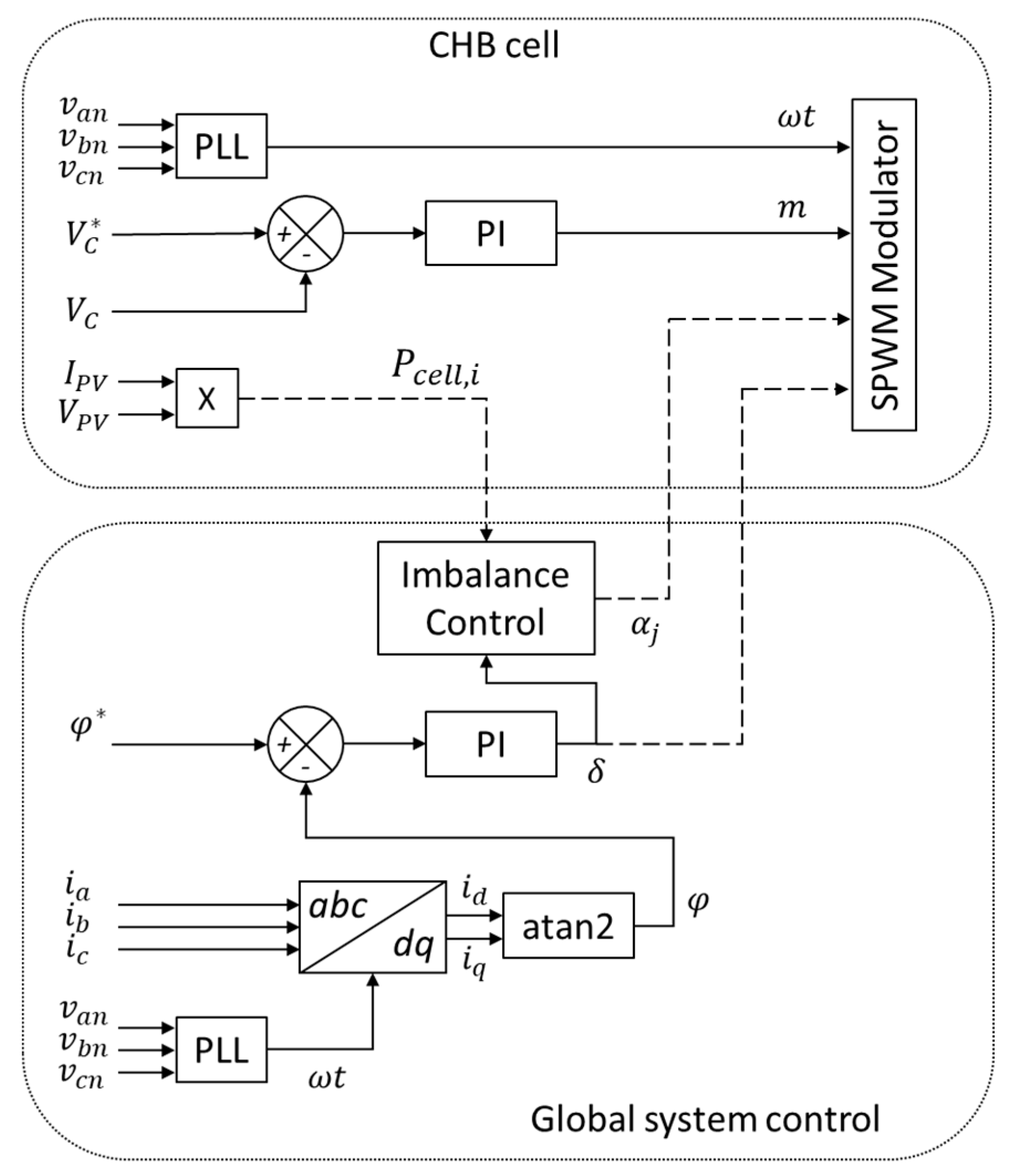
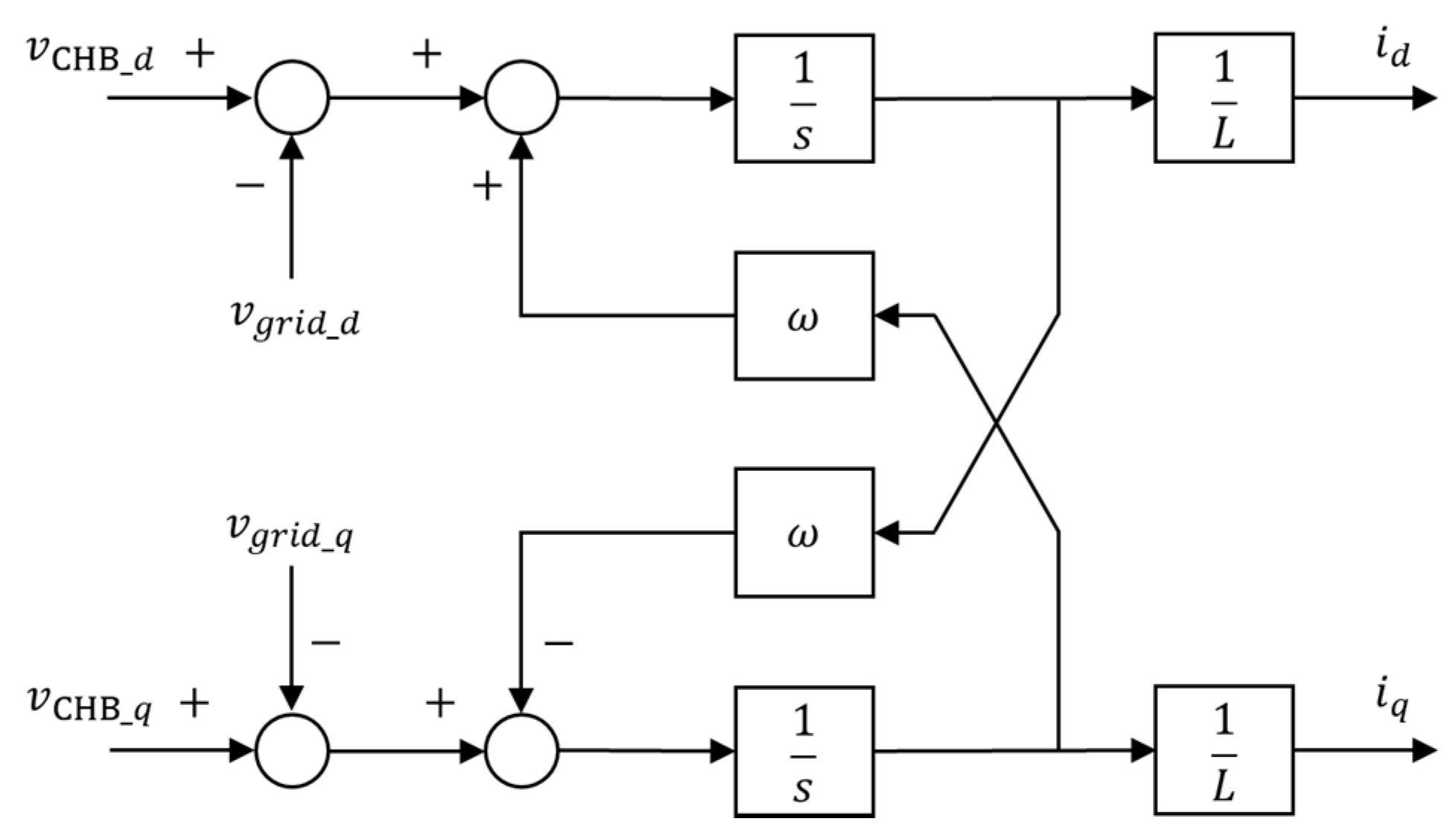
3.1. CHB Cell Control
3.2. Global System Control
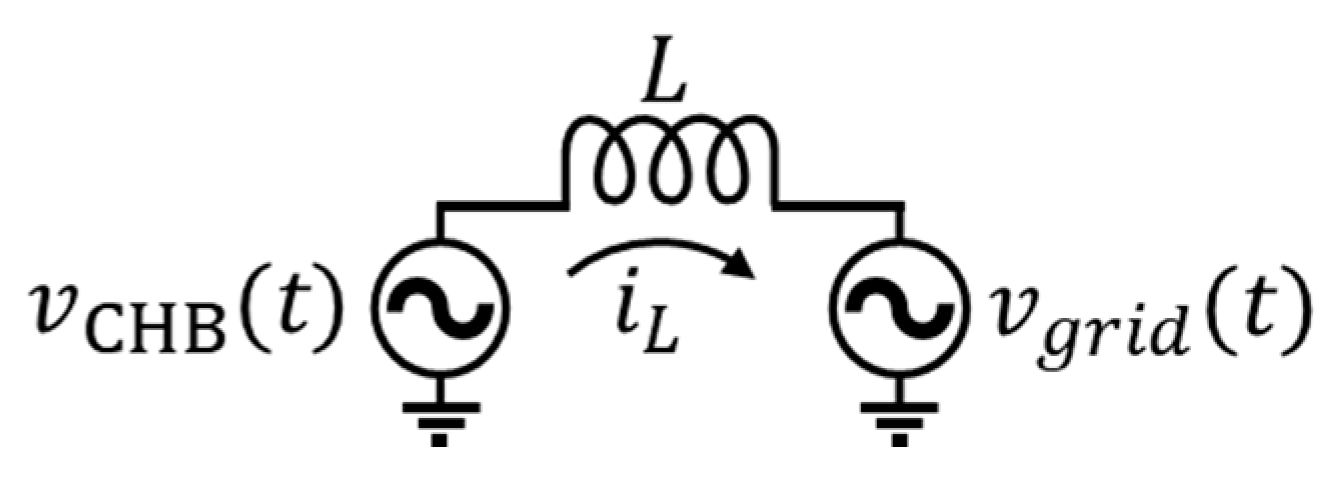
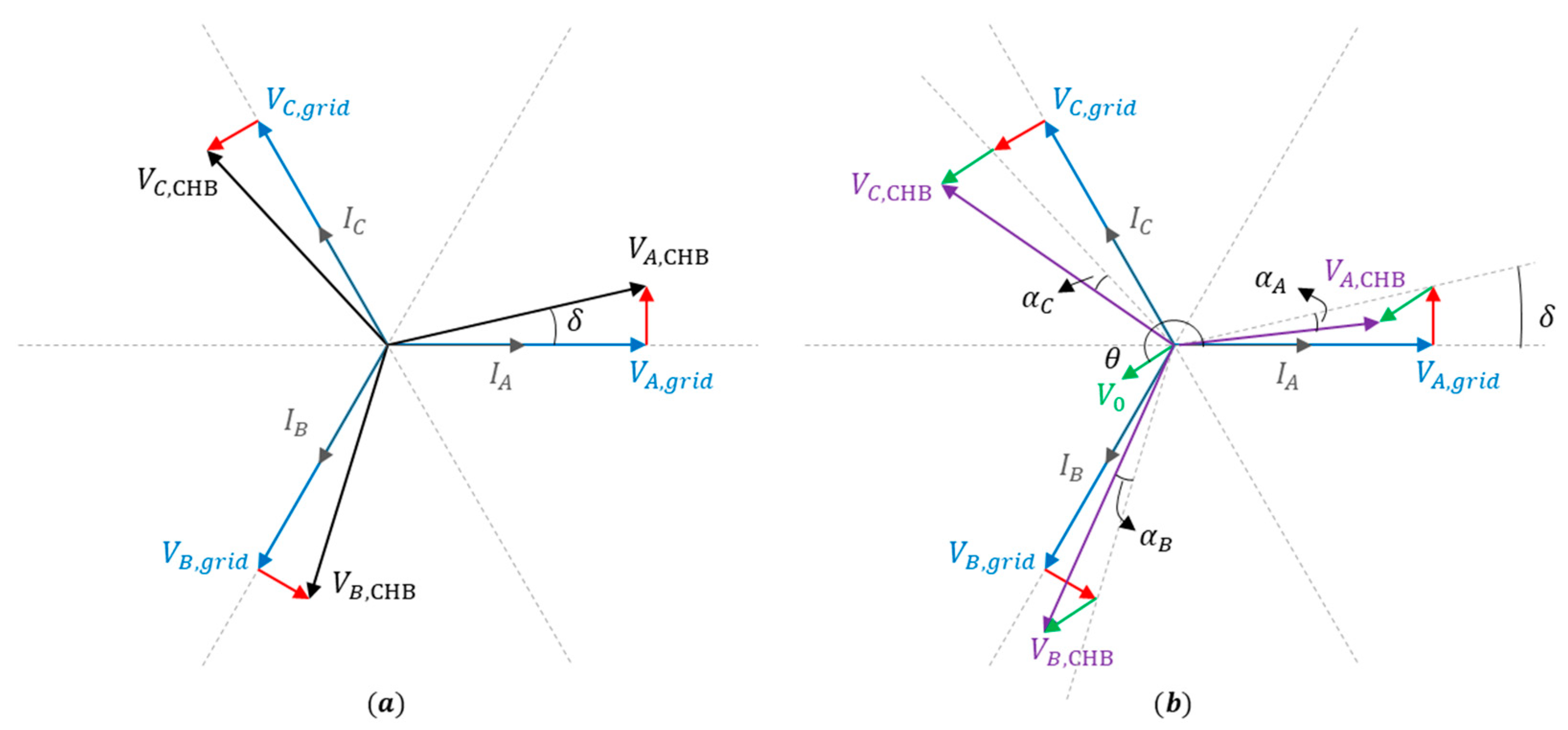
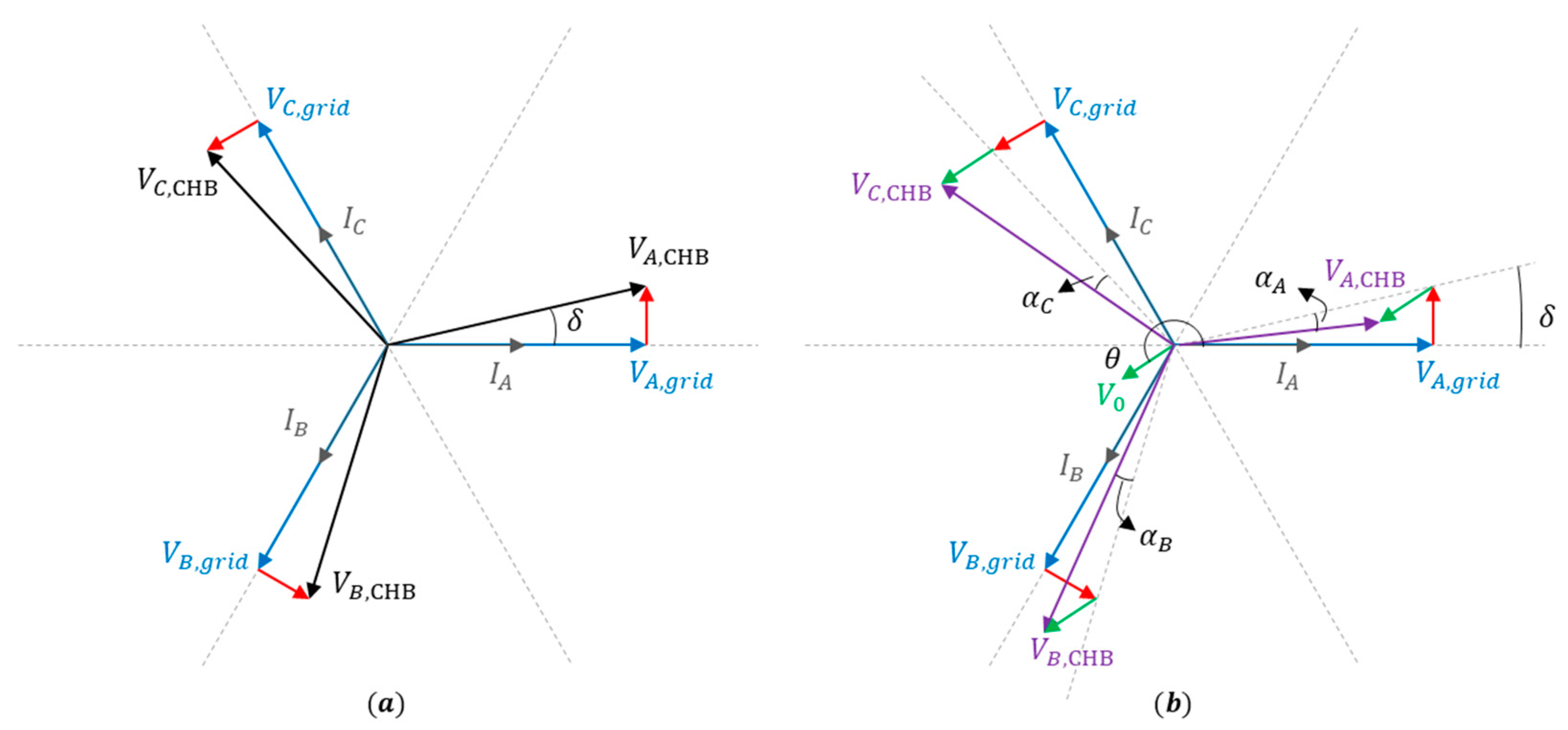
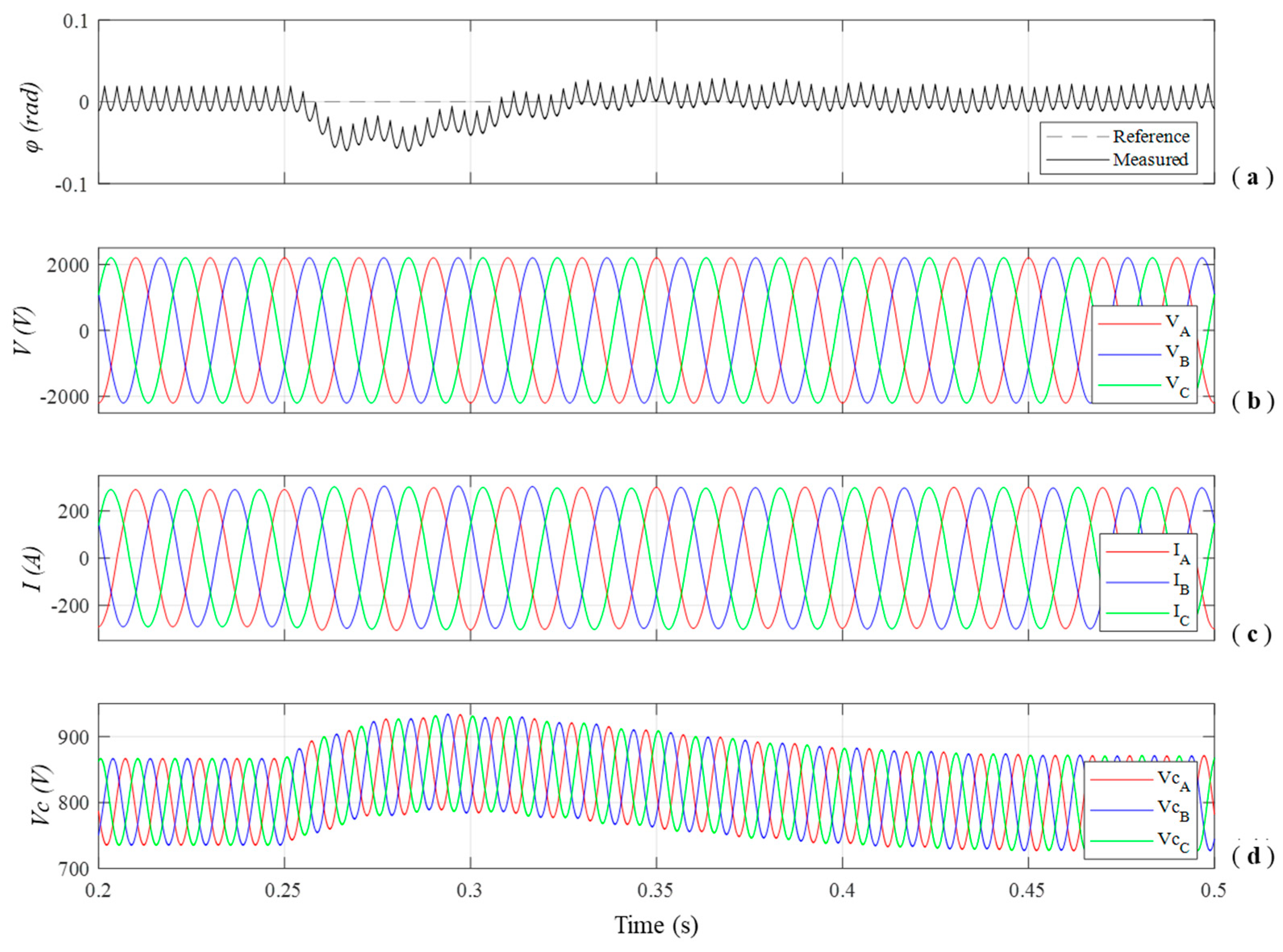
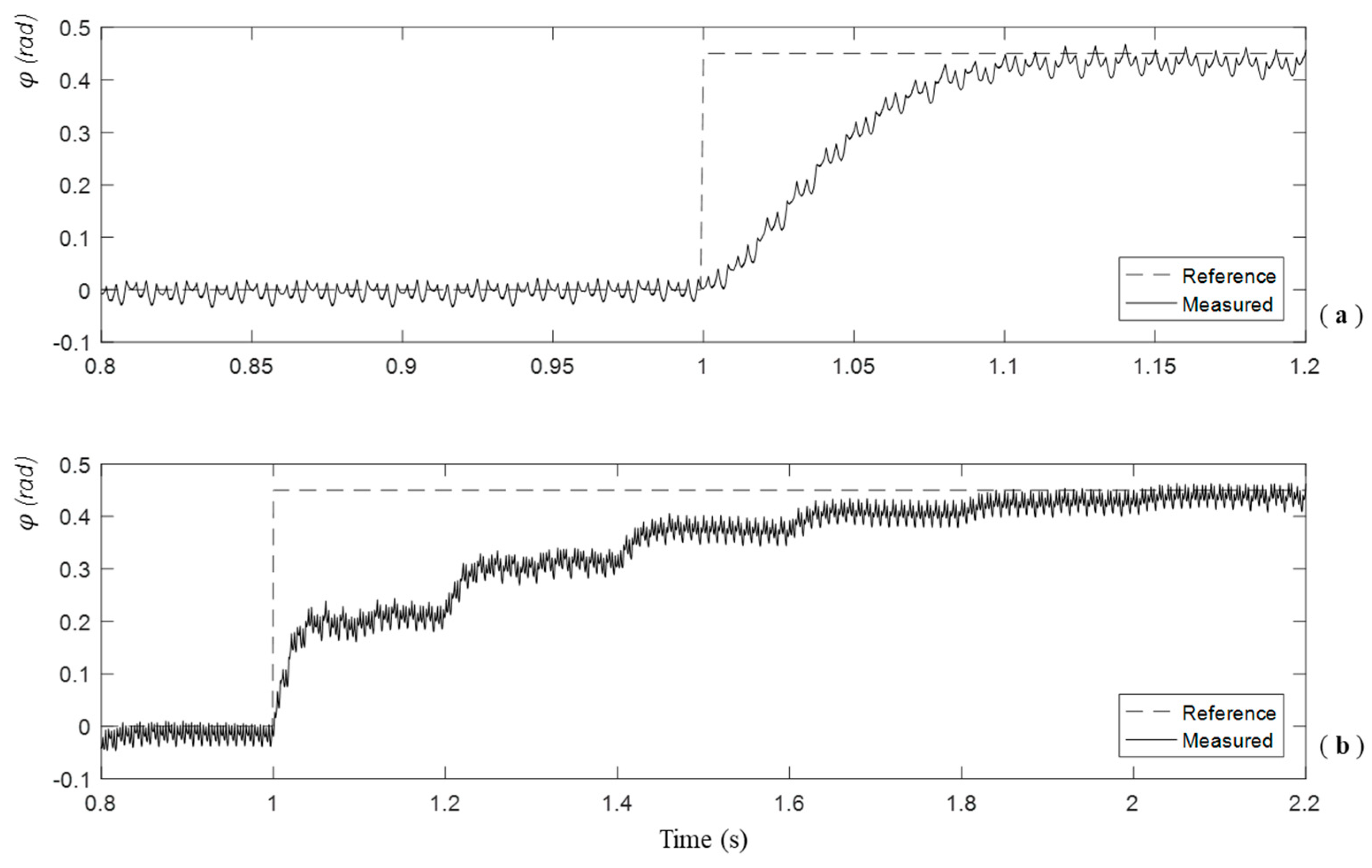
3.2.1. Power Factor Control
3.2.2. Imbalance Control
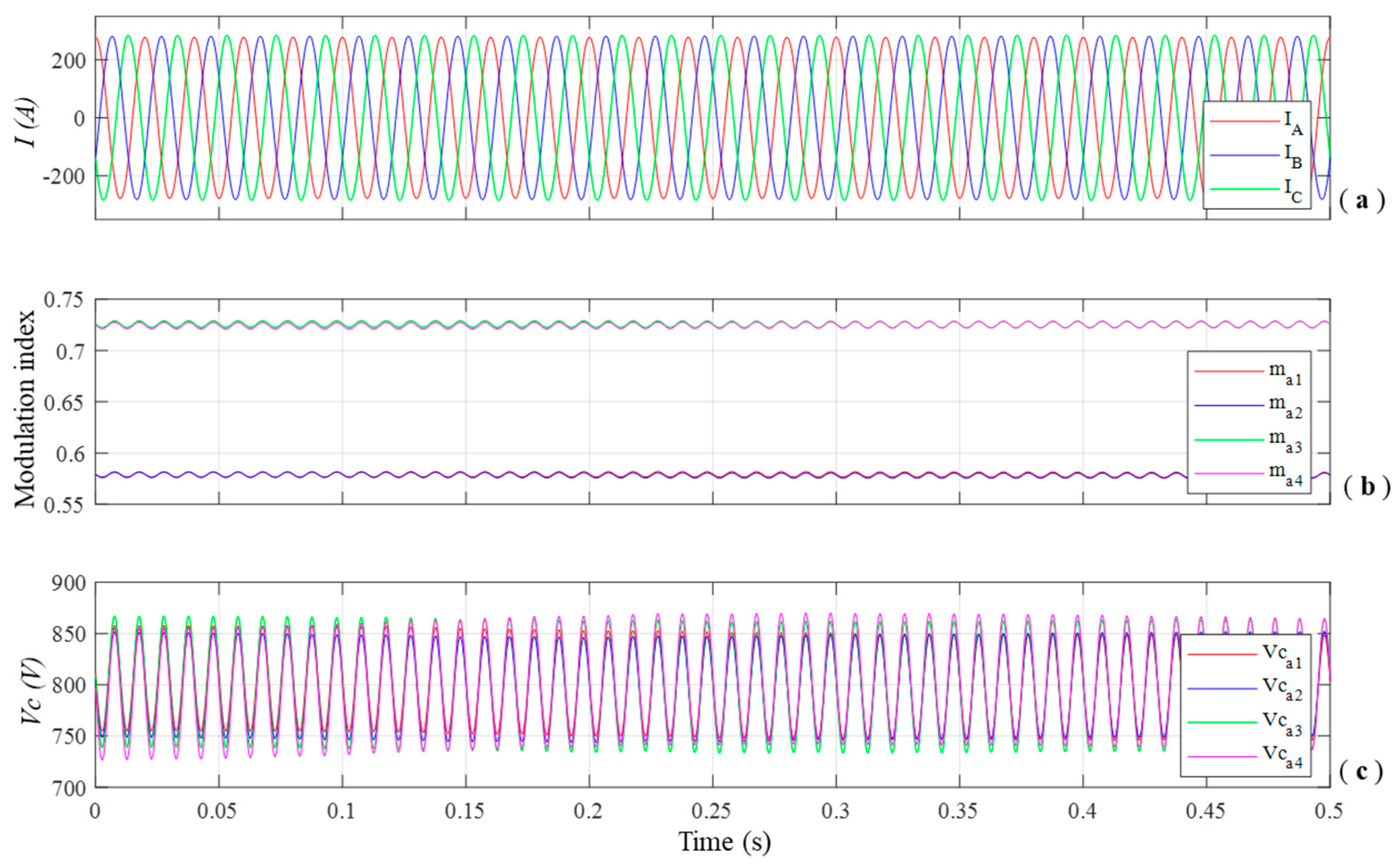
4. Results and Discussion
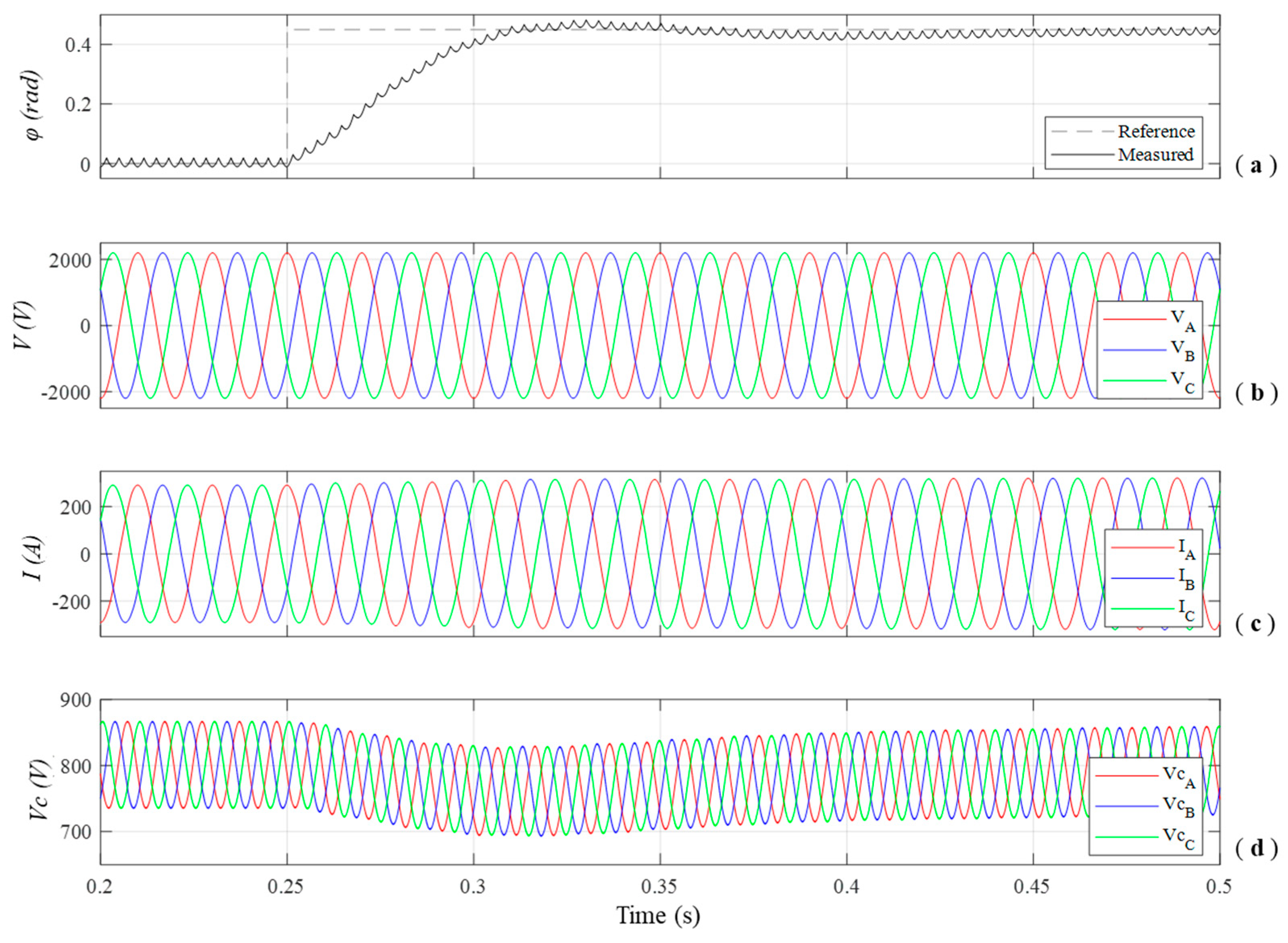
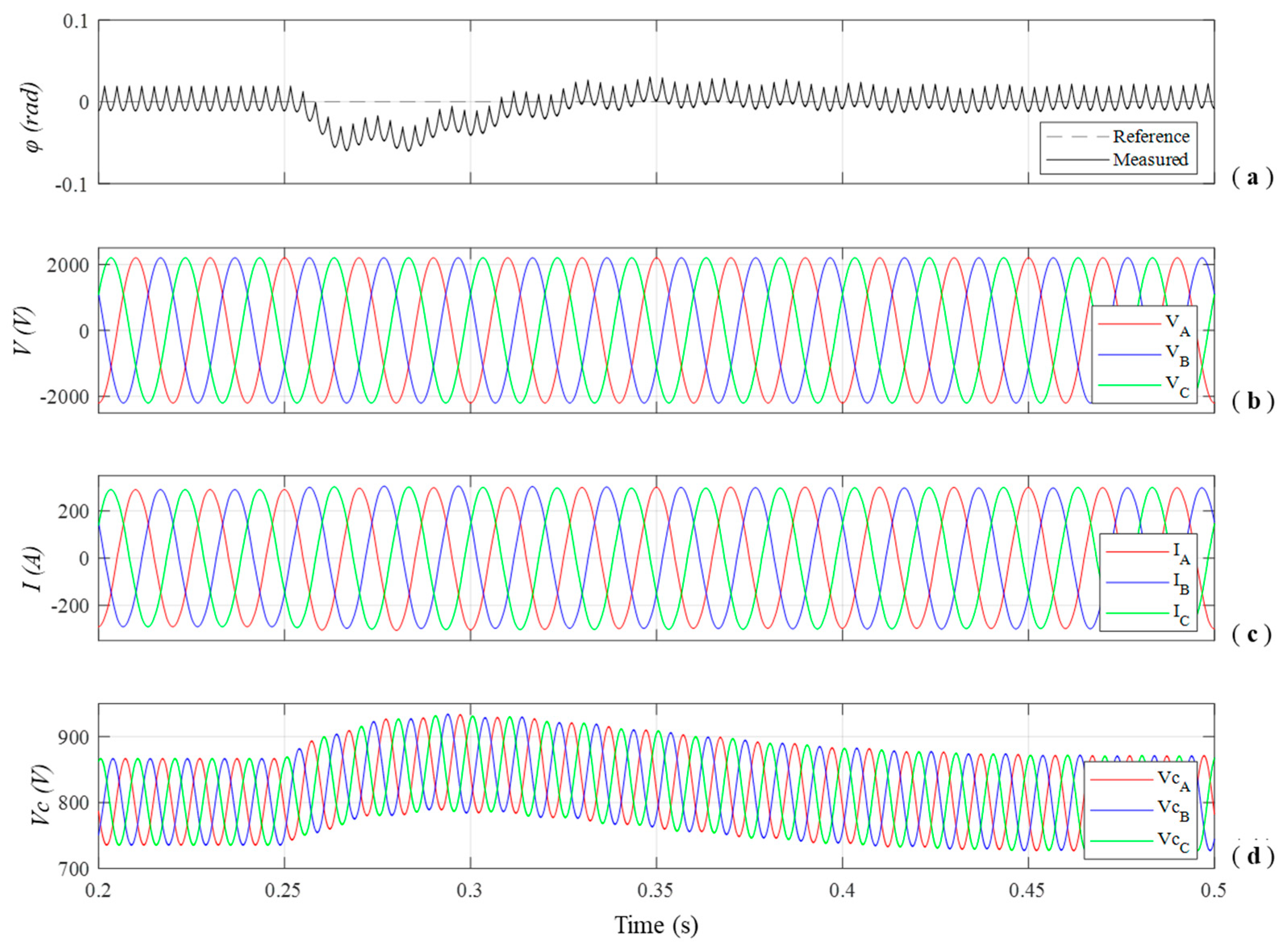
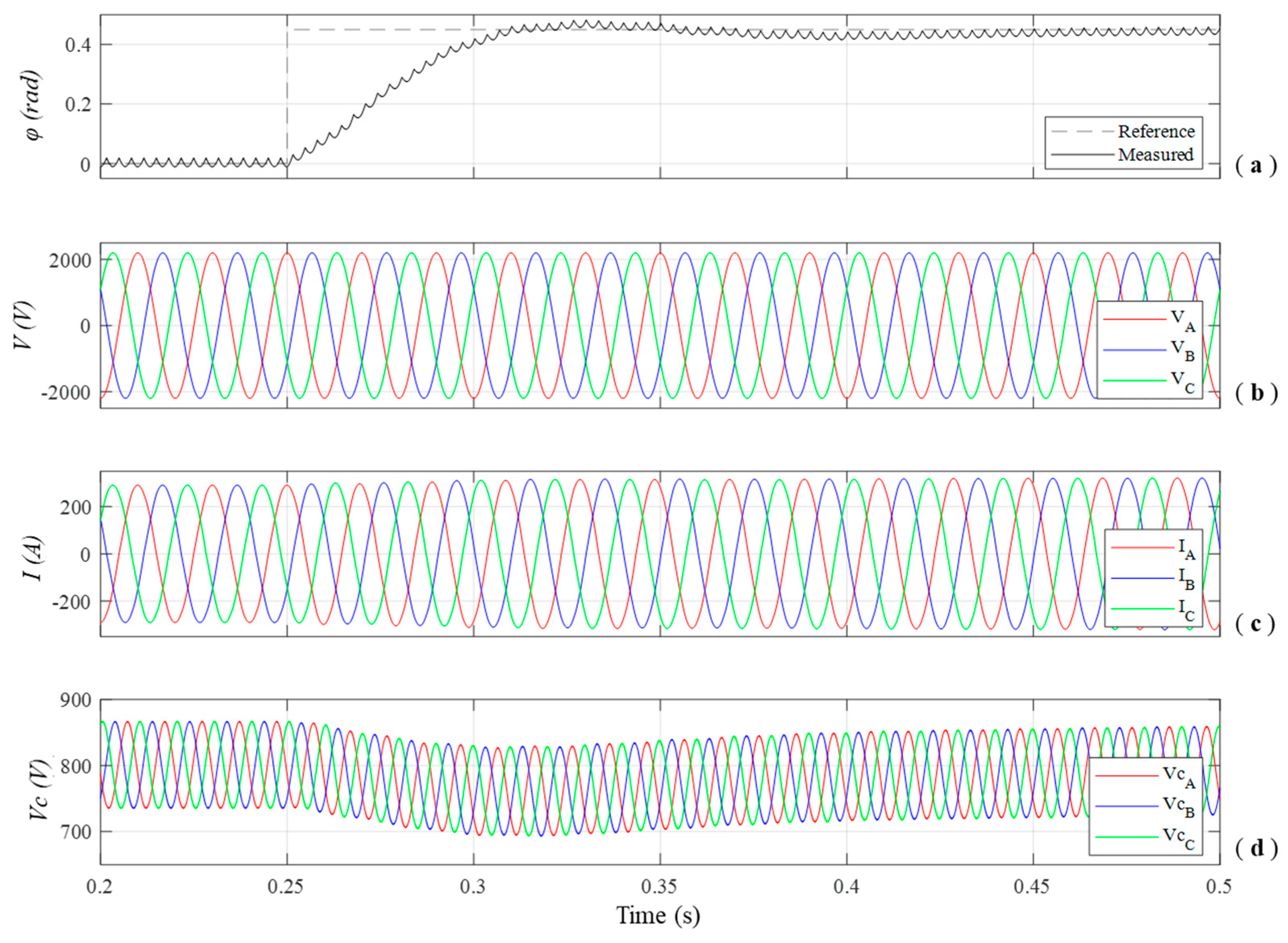
4.1. Power Factor Control and CHB Cell Control Validation
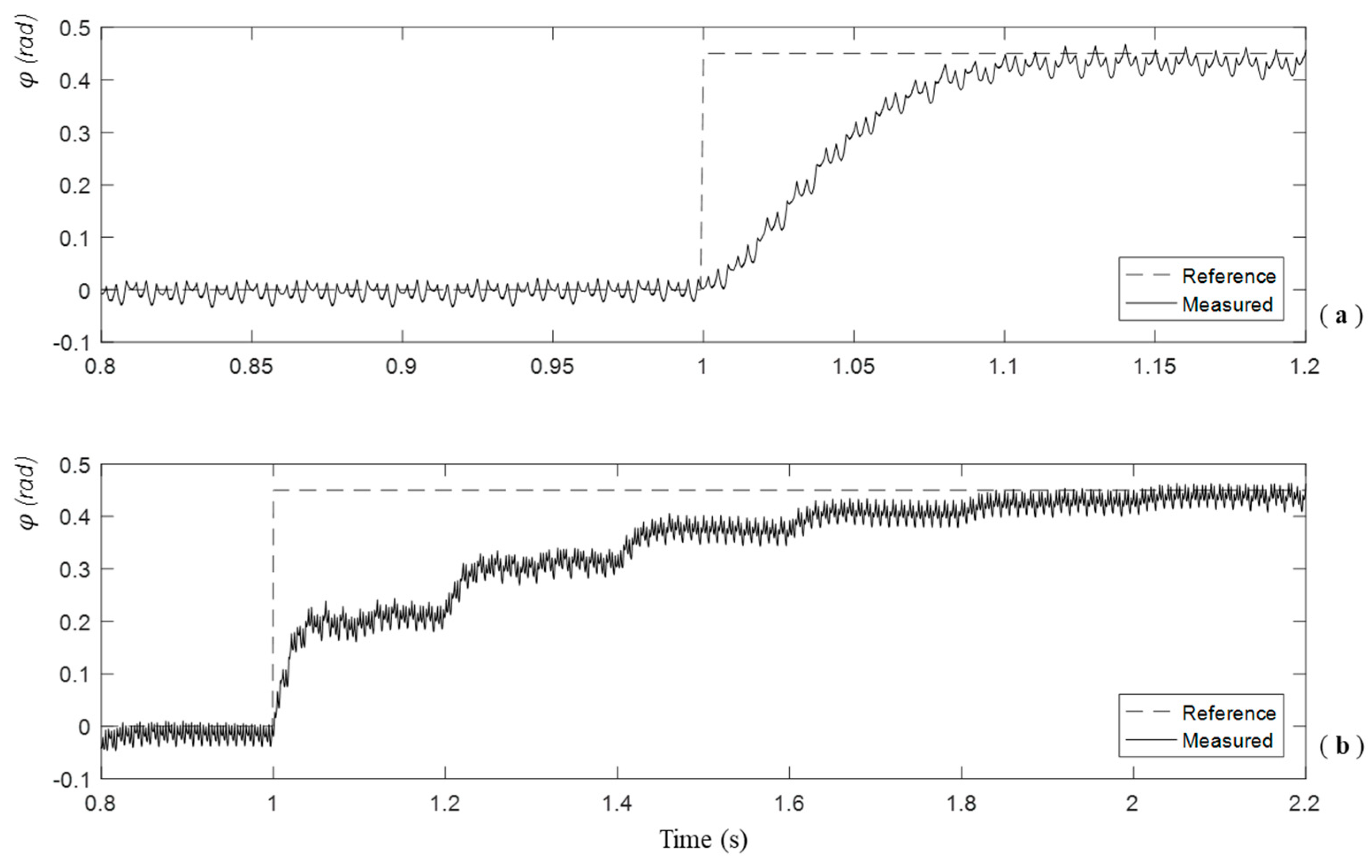
4.2. Communication Requirements
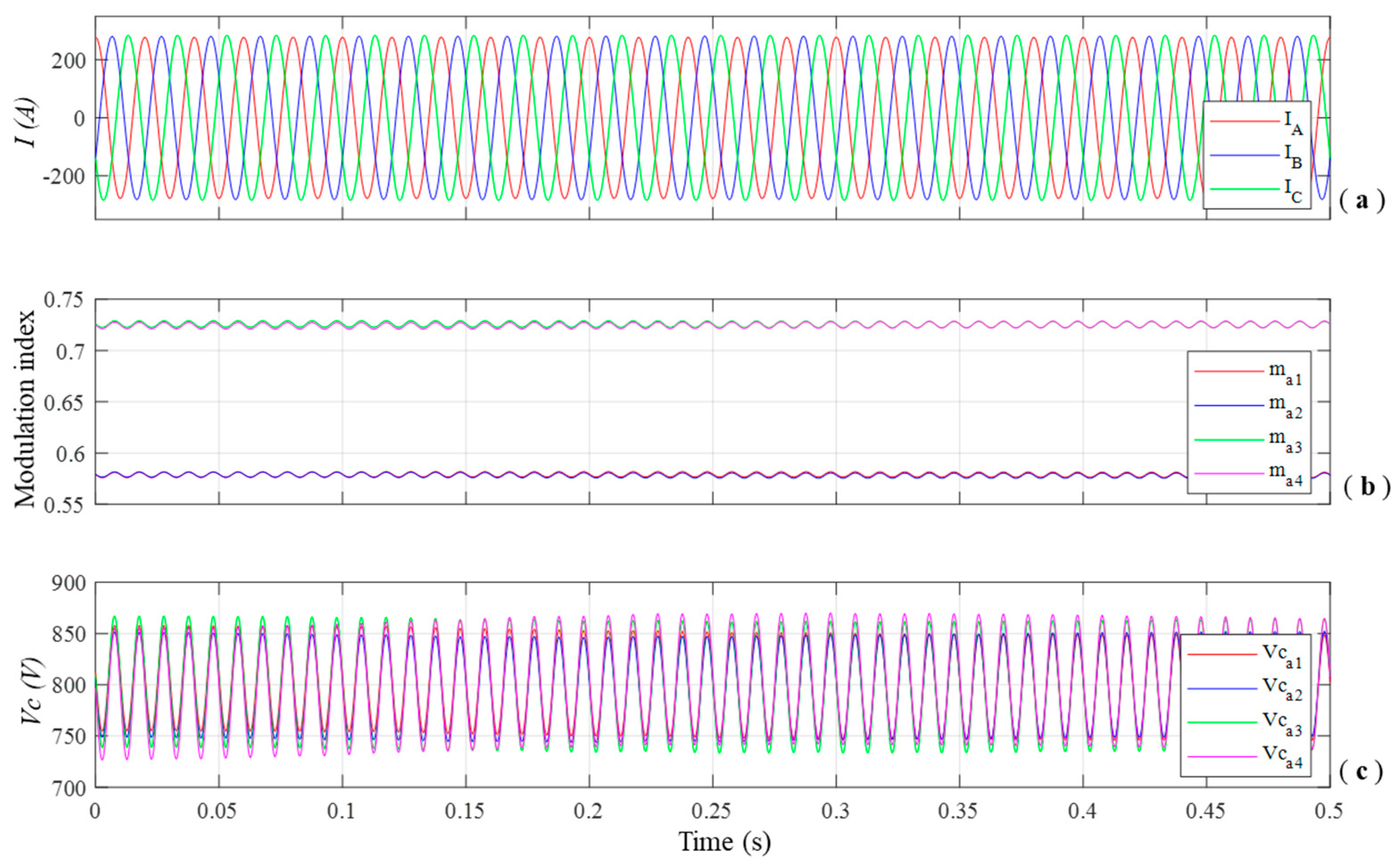
4.3. Zero-Sequence Vector Injection
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| ia, ib, ic | phase currents |
| I0 | phase currents amplitude |
| van, vbn, vcn | phase to neutral grid voltages |
| Vgrid | phase to neutral grid voltage amplitude |
| vCHB | CHB generated voltage |
| VCHB | CHB generated voltage amplitude |
| L | grid connection inductor |
| N | number of cells |
| C | cell capacitor |
| VC | capacitor voltage |
| VPV | photovoltaic panel voltage |
| IPV | photovoltaic panel current |
| Pcell,i | ith cell power |
| PA, PB, PC | DC power generated by cells of phases A, B and C |
| Pavg | mean phase power |
| ω | grid frequency |
| m | modulation index |
| δ | phase delay |
| φ | power factor angle |
| αj | imbalance control phase delays |
| P | active power |
| Q | reactive power |
| V0 | zero sequence vector amplitude |
| θ | zero sequence vector angle |
References
- International Renewable Energy Agency Abu Dhabi. Renewable Generation Costs 2018; IRENA: Masdar City, Abu Dhabi, 2019. [Google Scholar]
- Albright, G.; Edie All Cell Technologies; Crossley, P.; Vassallo, A. Battery Storage Report; IRENA: Masdar City, Abu Dhabi, 2015. [Google Scholar]
- Ram, M.; Aghahosseini, A.; Breyer, C. Job creation during the global energy transition towards 100% renewable power system by 2050. Technol. Forecast. Soc. Chang. 2020, 151, 119682. [Google Scholar] [CrossRef]
- Sher, H.A.; Addoweesh, K.E.; Al-Haddad, K. An Efficient and Cost-Effective Hybrid MPPT Method for a Photovoltaic Flyback Microinverter. IEEE Trans. Sustain. Energy 2018, 9, 1137–1144. [Google Scholar] [CrossRef]
- Kim, H.; Lee, J.S.; Lai, J.-S.; Kim, M. Iterative learning controller with multiple phase-lead compensation for dual-mode flyback inverter. IEEE Trans. Power Electron. 2017, 32, 6468–6480. [Google Scholar] [CrossRef]
- Ding, M.; Xu, Z.; Wang, W.; Wang, X.; Song, Y.; Chen, D. A review on China’s large-scale PV integration: Progress, challenges and recommendations. Renew. Sustain. Energy Rev. 2016, 53, 639–652. [Google Scholar] [CrossRef]
- Kouro, S.; Malinowski, M.; Gopakumar, K.; Pou, J.; Franquelo, L.G.; Wu, B.; Rodriguez, J.; Perez, M.A.; Leon, J.I. Recent Advances and Industrial Applications of Multilevel Converters. IEEE Trans. Ind. Electron. 2010, 57, 2553–2580. [Google Scholar] [CrossRef]
- Rivera, S.; Kouro, S.; Wu, B.; Leon, J.I.; Rodriguez, J.; Franquelo, L.G. Cascaded H-bridge multilevel converter multistring topology for large scale photovoltaic systems. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 1837–1844. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; Zhu, R.; Wei, C.; Liu, F.; Wu, X.; Liserre, M. Cascaded Multilevel Converter Topology for Large-Scale Photovoltaic System with Balanced Operation. IEEE Trans. Ind. Electron. 2019, 66, 7694–7705. [Google Scholar] [CrossRef]
- Xiao, B.; Hang, L.; Mei, J.; Riley, C.; Tolbert, L.; Ozpineci, B. Modular Cascaded H-Bridge Multilevel PV Inverter With Distributed MPPT for Grid-Connected Applications. IEEE Trans. Ind. Appl. 2015, 51, 1722–1731. [Google Scholar] [CrossRef]
- Marks, N.D.; Summers, T.J.; Betz, R.E. Reactive power requirements for cascaded H-Bridge photovoltaic systems. In Proceedings of the IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society 2014, Dallas, TX, USA, 29 October–1 November 2014; pp. 2219–2225. [Google Scholar] [CrossRef]
- Mateus, T.H.D.A.; Pomilio, J.A.; Godoy, R.B.; Pinto, J.O.P. Distributed MPPT scheme for grid connected operation of photovoltaic system using cascaded H-bridge multilevel converter under partial shading. In Proceedings of the 2017 IEEE Southern Power Electronics Conference (SPEC) 2017, Puerto Varas, Chile, 4–7 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Cortes-Vega, D.; Alazki, H. Robust maximum power point tracking scheme for PV systems based on attractive ellipsoid method. Sustain. Energy Grids Netw. 2021, 25, 100410. [Google Scholar] [CrossRef]
- Malinowski, M.; Kazmierkowski, M.P.; Trzynadlowski, A. A comparative study of control techniques for PWM rectifiers in AC adjustable speed drives. IEEE Trans. Power Electron. 2003, 18, 1390–1396. [Google Scholar] [CrossRef]
- Haji-Esmaeili, M.M.; Naseri, M.; Khoun-Jahan, H.; Abapour, M. Fault-tolerant structure for cascaded H-bridge multilevel inverter and reliability evaluation. IET Power Electron. 2017, 10, 59–70. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, K.; Xiong, J.; Xue, Y.; Liu, W. An Efficient Modulation Strategy for Cascaded Photovoltaic Systems Suffering From Module Mismatch. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 941–954. [Google Scholar] [CrossRef]
- Stonier, A.A.; Lehman, B. An Intelligent-Based Fault-Tolerant System for Solar-Fed Cascaded Multilevel Inverters. IEEE Trans. Energy Convers. 2018, 33, 1047–1057. [Google Scholar] [CrossRef]
- Baimel, D. Implementation of DQ0 control methods in high power electronics devices for renewable energy sources, energy storage and FACTS. Sustain. Energy Grids Netw. 2019, 18, 100218. [Google Scholar] [CrossRef]
- Li, B.; Yang, R.; Xu, D.; Wang, G.; Wang, W.; Xu, D. Analysis of the Phase-Shifted Carrier Modulation for Modular Multilevel Converters. IEEE Trans. Power Electron. 2015, 30, 297–310. [Google Scholar] [CrossRef]
- Kouro, S.; Wu, B.; Moya, A.; Villanueva, E.; Correa, P.; Rodriguez, J. Control of a cascaded H-bridge multilevel converter for grid connection of photovoltaic systems. In Proceedings of the 2009 35th Annual Conference of IEEE Industrial Electronic, Porto, Portugal, 3–5 November 2009; pp. 3976–3982. [Google Scholar] [CrossRef]
- Mathe, L.; Burlacu, P.D.; Teodorescu, R. Control of a Modular Multilevel Converter with Reduced Internal Data Exchange. IEEE Trans. Ind. Inform. 2017, 13, 248–257. [Google Scholar] [CrossRef]
- McGrath, B.P.; Holmes, D.G.; Kong, W.Y. A Decentralized controller architecture for a cascaded H-bridge multilevel converter. IEEE Trans. Ind. Electron. 2014, 61, 1169–1178. [Google Scholar] [CrossRef]
- Wu, P.-H.; Su, Y.-C.; Shie, J.-L.; Cheng, P.-T. A Distributed Control Technique for the Multilevel Cascaded Converter. IEEE Trans. Ind. Appl. 2019, 55, 1649–1657. [Google Scholar] [CrossRef]
- Yu, Y.; Konstantinou, G.; Hredzak, B.; Agelidis, V.G. Operation of Cascaded H-Bridge Multilevel Converters for Large-Scale Photovoltaic Power Plants under Bridge Failures. IEEE Trans. Ind. Electron. 2015, 62, 7228–7236. [Google Scholar] [CrossRef]
- Buccella, C.; Cecati, C.; Latafat, H.; Razi, K. A grid-connected PV system with LLC resonant DC-DC converter. In Proceedings of the 2013 International Conference on Clean Electrical Power (ICCEP), Alghero, Italy, 11–13 June 2013; pp. 777–782. [Google Scholar] [CrossRef]
- Sochor, P.; Akagi, H. Theoretical comparison in energy-balancing capability between star- and delta-configured modular multilevel cascade inverters for utility-scale photovoltaic systems. IEEE Trans. Power Electron. 2016, 31, 1980–1992. [Google Scholar] [CrossRef]
- De Kooning, J.; Van De Vyver, J.; De Kooning, J.D.; VanDoorn, T.L.; Vandevelde, L. Grid voltage control with distributed generation using online grid impedance estimation. Sustain. Energy Grids Netw. 2016, 5, 70–77. [Google Scholar] [CrossRef]
- Khluabwannarat, P.; Thammarat, C.; Tadsuan, S.; Bunjongjit, S. An analysis of iron loss supplied by sinusoidal, square wave, bipolar PWM inverter and unipolar PWM inverter. In Proceedings of the 8th International Power Engineering Conference, IPEC, Singapore, 3–6 December 2007; pp. 1185–1190. [Google Scholar]
- Liang, G.; Tafti, H.D.; Farivar, G.G.; Pou, J.; Townsend, C.D.; Konstantinou, G.; Ceballos, S. Analytical Derivation of Intersubmodule Active Power Disparity Limits in Modular Multilevel Converter-Based Battery Energy Storage Systems. IEEE Trans. Power Electron. 2021, 36, 2864–2874. [Google Scholar] [CrossRef]
- Gataric, S.; Garrigan, N. Modeling and design of three-phase systems using complex transfer functions. PESC Rec. IEEE Annu. Power Electron. Spec. Conf. 1999, 2, 691–697. [Google Scholar]
- Essakiappan, S.; Krishnamoorthy, H.S.; Enjeti, P.; Balog, R.S.; Ahmed, S. Multilevel Medium-Frequency Link Inverter for Utility Scale Photovoltaic Integration. IEEE Trans. Power Electron. 2015, 30, 3674–3684. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameters | Value |
|---|---|
| L (mH) | 5 |
| f (Hz) | 50 |
| fs (kHz) | 10 |
| C (mF) | 2.5 |
| V*C (V) | 800 |
| Vgrid (V) | 2200 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez Mayo, Á.; Galarza, A.; López Barriuso, A.; Vadillo, J. A Scalable Control Strategy for CHB Converters in Photovoltaic Applications. Energies 2022, 15, 208. https://doi.org/10.3390/en15010208
Pérez Mayo Á, Galarza A, López Barriuso A, Vadillo J. A Scalable Control Strategy for CHB Converters in Photovoltaic Applications. Energies. 2022; 15(1):208. https://doi.org/10.3390/en15010208
Chicago/Turabian StylePérez Mayo, Álvaro, Ainhoa Galarza, Asier López Barriuso, and Javier Vadillo. 2022. "A Scalable Control Strategy for CHB Converters in Photovoltaic Applications" Energies 15, no. 1: 208. https://doi.org/10.3390/en15010208
APA StylePérez Mayo, Á., Galarza, A., López Barriuso, A., & Vadillo, J. (2022). A Scalable Control Strategy for CHB Converters in Photovoltaic Applications. Energies, 15(1), 208. https://doi.org/10.3390/en15010208