
Grid-Tied Distribution Static Synchronous Compensator for Power Quality Enhancement Using Combined-Step-Size Real-Coefficient Improved Proportionate Affine Projection Sign Algorithm

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Development of the CSS-RIP-APSA control technique for elimination of the third-order harmonic component present in the grid currents under steady-state and transient conditions for a three-phase three-leg four-wire system.
- The proposed control technique is used for extracting the fundamental and quadrature components from non-linear load currents.
- The robustness of the controller is examined with the presence of the unbalanced grid voltages and transient conditions.
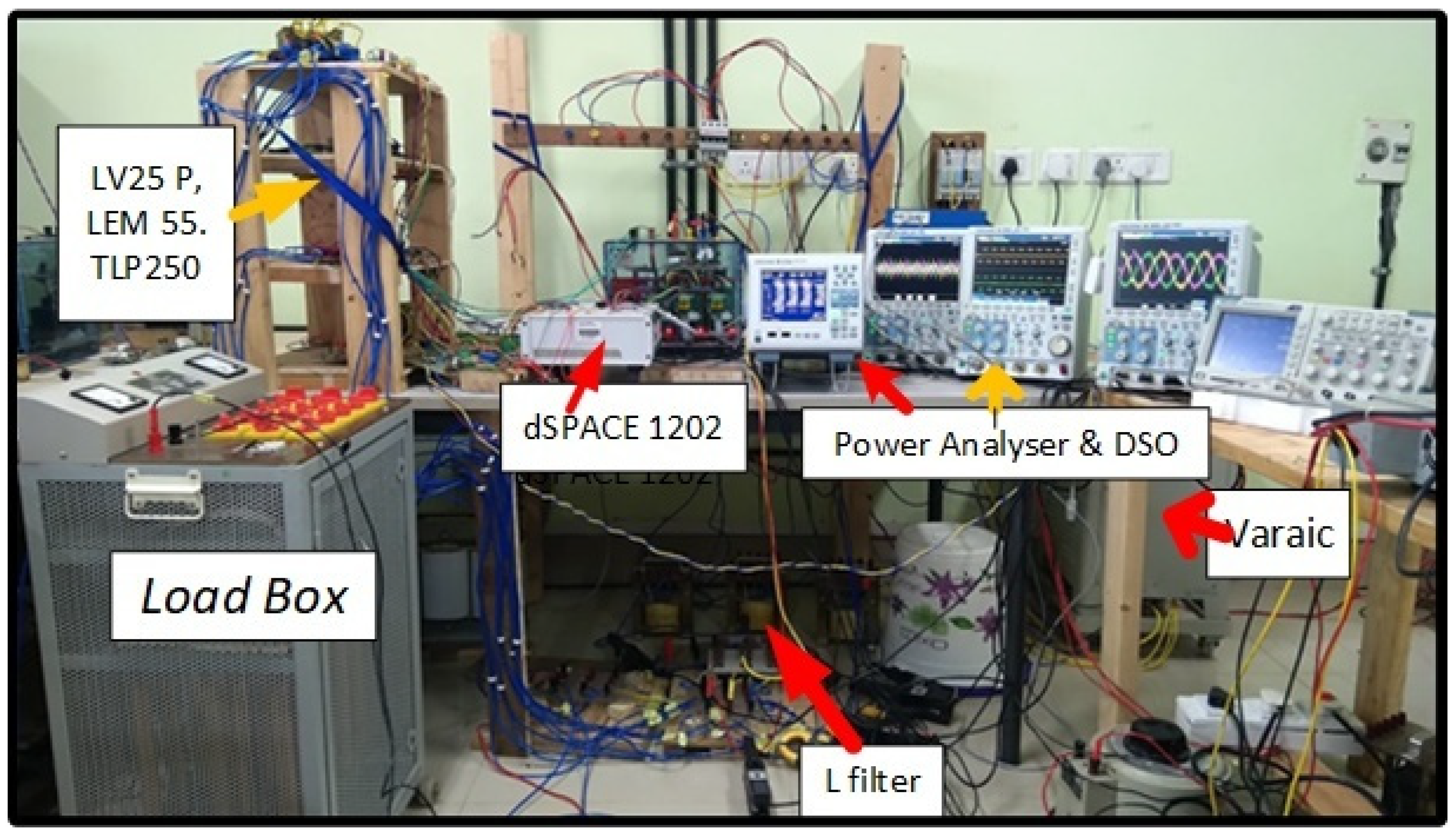
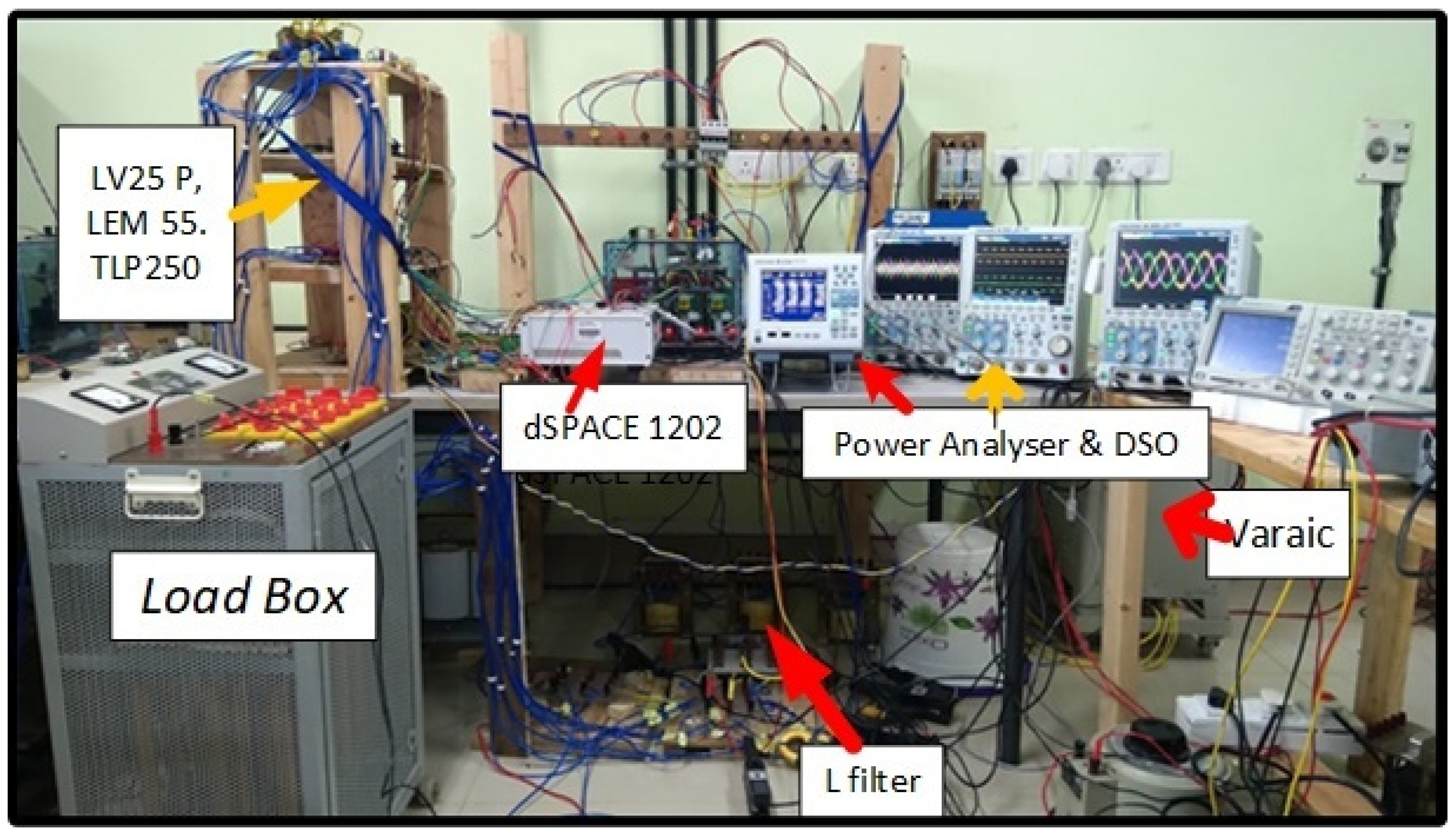
- Hardware validation of the proposed work is conducted in the laboratory for athree-phase three-leg four-wire grid interfacing DSTATCOM with the help of dSPACE MicroLabBox.
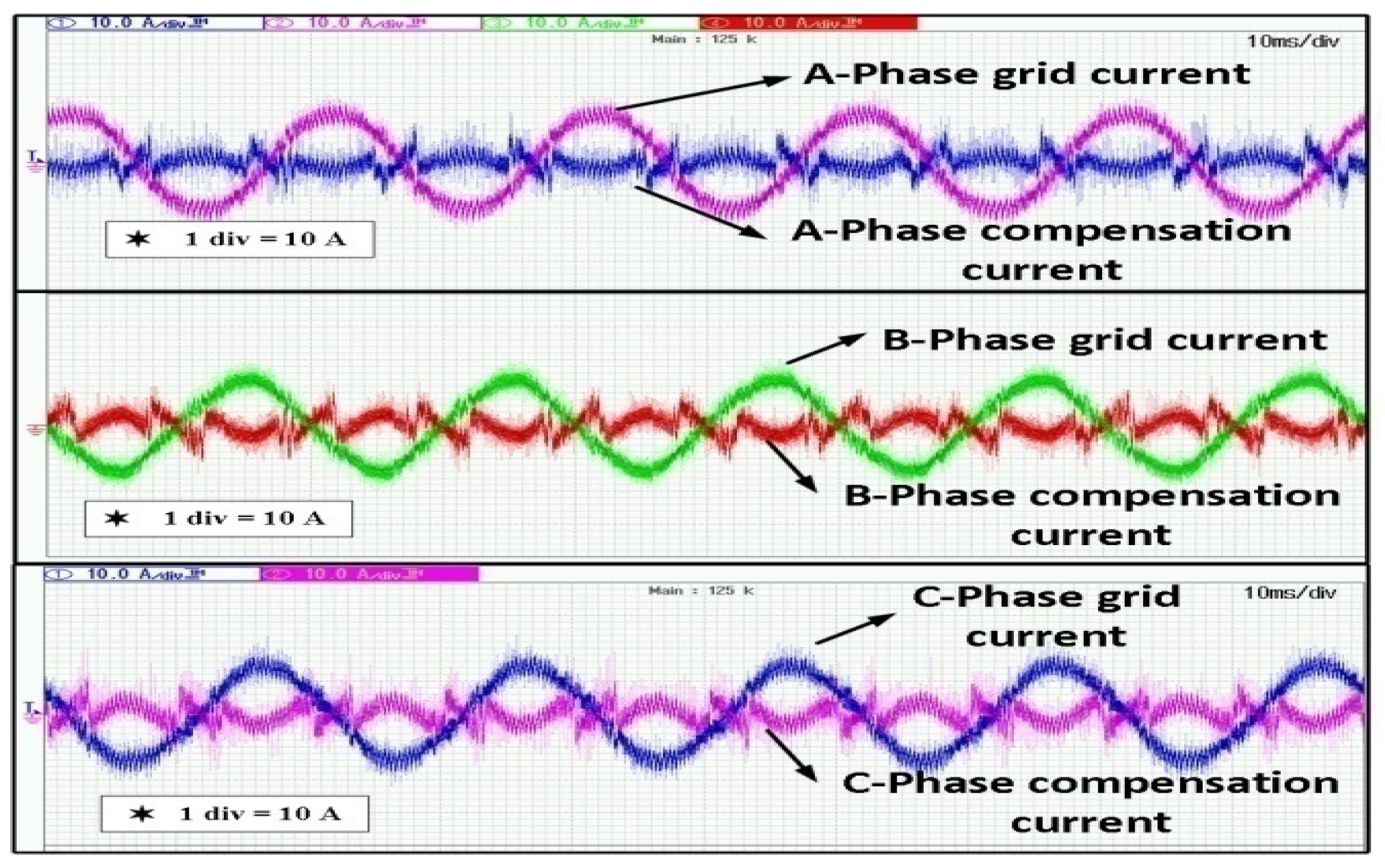
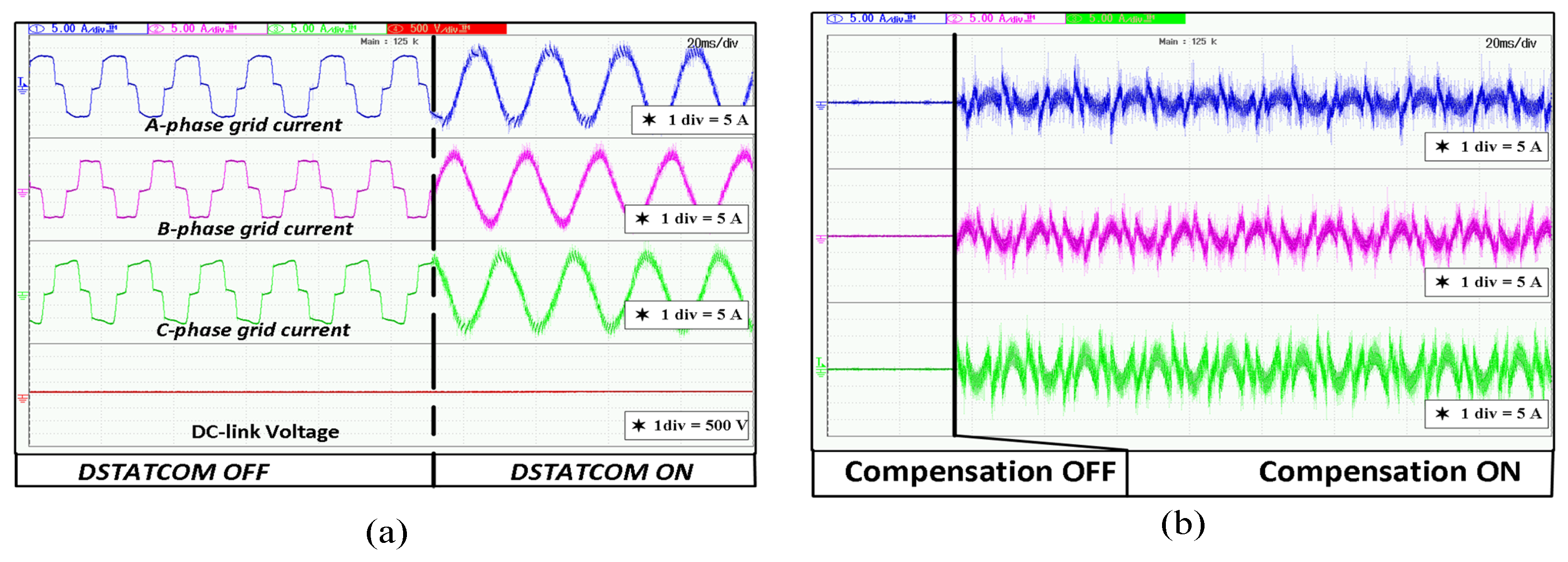
- Mitigation of the power quality issues such as harmonic elimination, compensation of reactive power, balancing grid-side current during voltage sag, and swell.
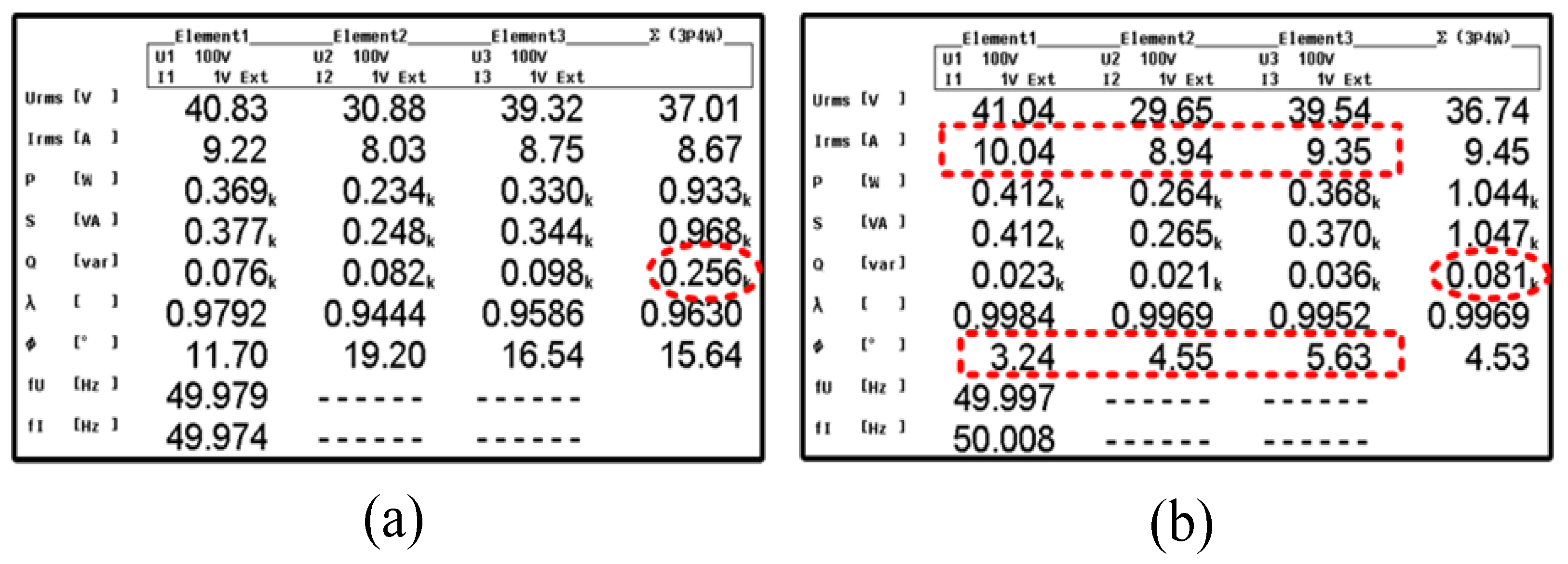
- Maintaining unity power factor operation at grid-side.
- Reduction in lower-order harmonics from grid currents under steady-state and transient conditions.
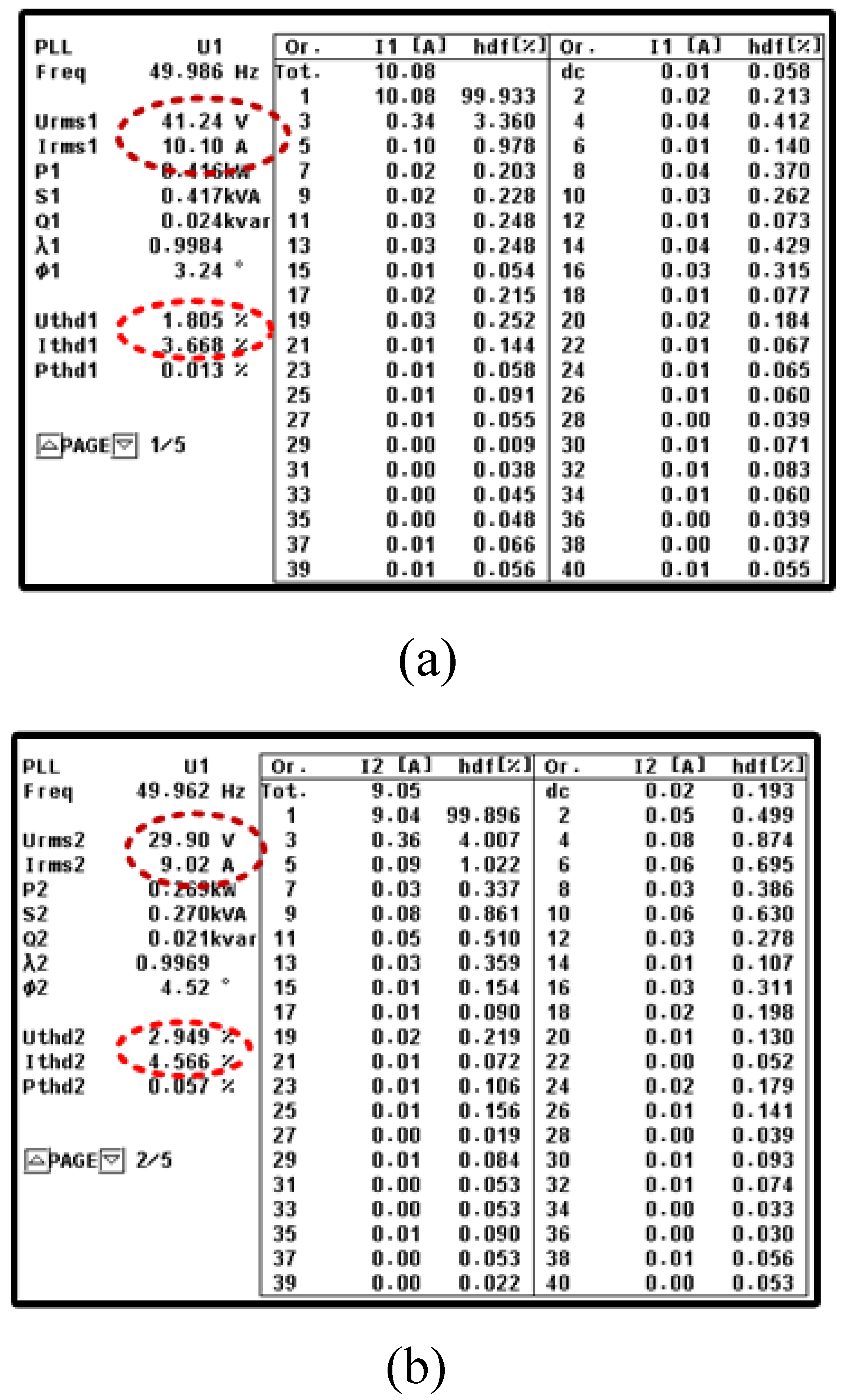
- A comparative analysis of the proposed controller with the exiting controller such as APSA and RIP-APSA is conducted in terms of total harmonic distortion (THD), convergence, steady-state error, sample time, and computation complexity.
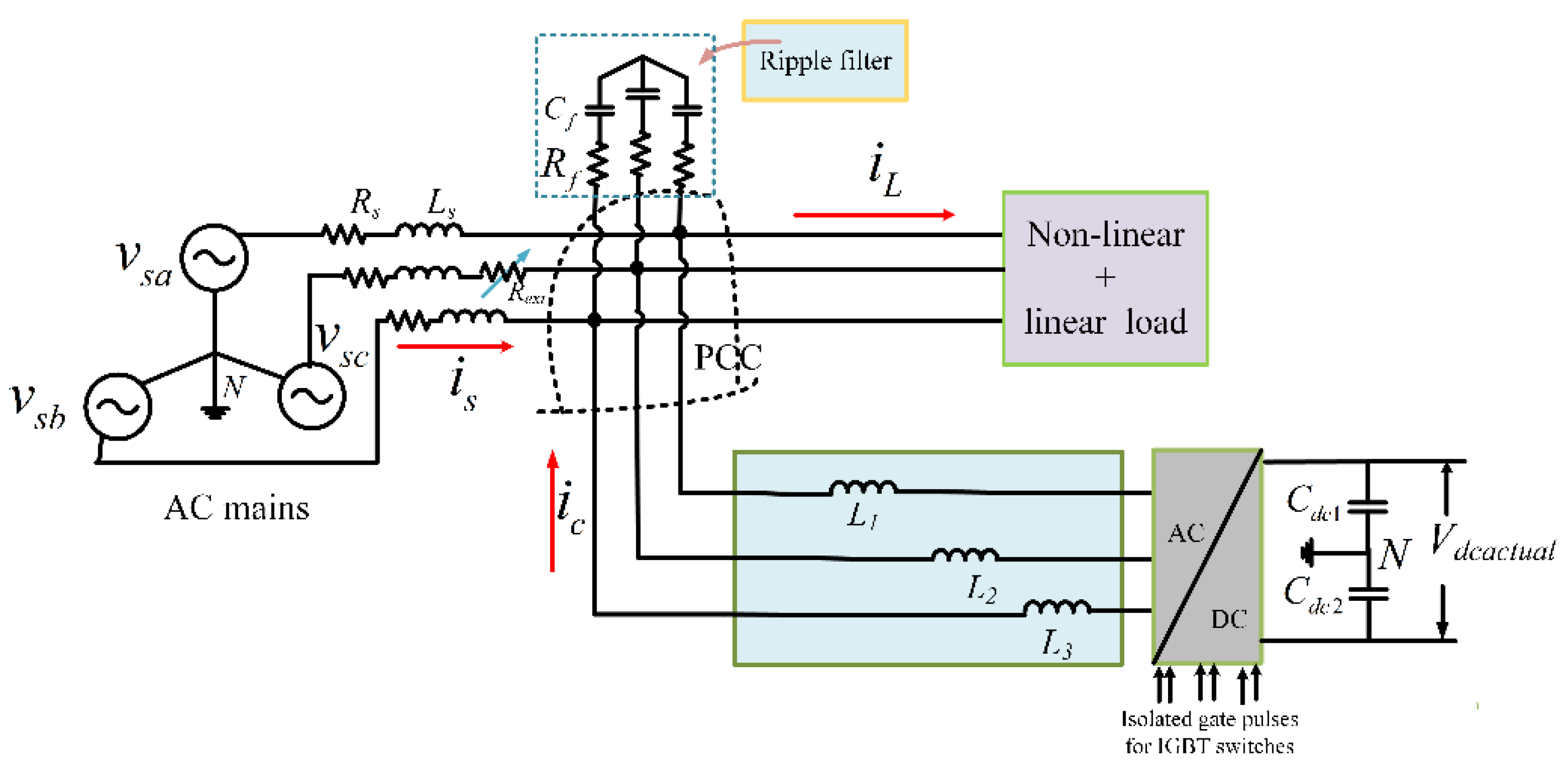
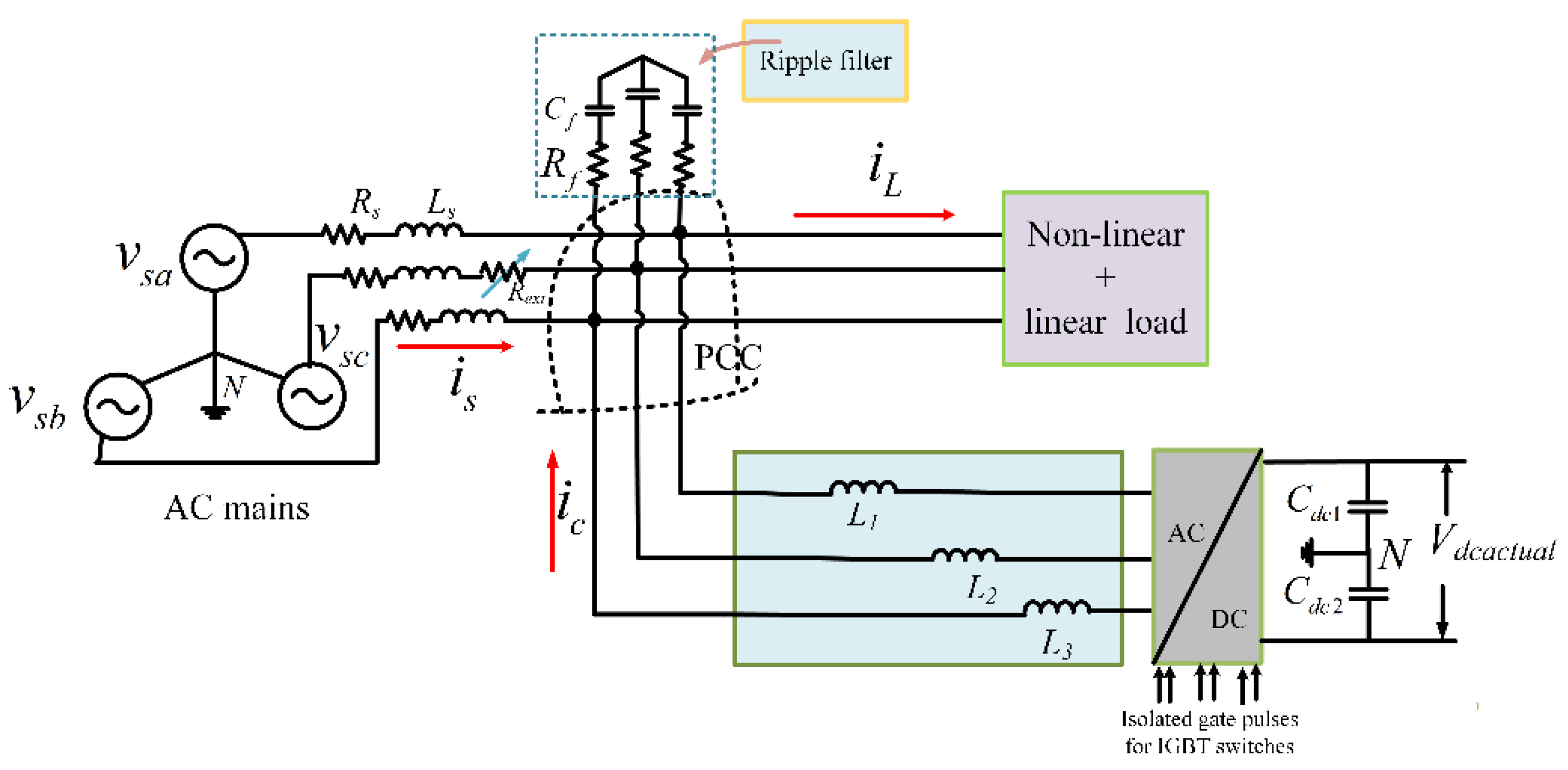
2. DSTATCOM Based on CSS-RIP-APSA Algorithm
Control Structure
3. Results and Discussion
3.1. Case 1
3.2. Case 2
4. Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
| System Quantities | Values |
| Unequal Source voltage (rms) | 41 V, 31 V, 41 V rms L-N, 50 Hz |
| Feeder impedance | = 0.3 ohm, = 0.3 mH, = 3.185 |
| PI tuning parameter | = 0.1, = 0.001; = 0.05, = 0.005 |
| Non-linear load | 3-Φ rectifier with RL load of 4 ohm and 40 mH |
| DSTATCOM parameter | = 165 V, = 2200 µF, = 0.55 mH |
References
- Rafi, F.H.M.; Hossain, M.J.; Town, G.; Lu, J. Smart voltage source inverters with a novel approach to enhance neutral-current compensation. IEEE Tran. Ind. Electron. 2019, 66, 3518–3529. [Google Scholar] [CrossRef]
- Akagi, H.; Watanabe, E.H.; Aredes, M. Instantaneous Power Theory and Applications to Power Conditioning; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Sahu, M.K.; Biswal, M.; Malla, J.M.R. THD analysis of a seven, nine, and eleven level cascaded H-bridge multilevel inverter for different loads. Teh. Glas. 2020, 14, 513–522. [Google Scholar]
- Malla, S.G.; Malla, J.M.R.; Malla, P.; Sreekanth, R.; Kumar, D.S.; Sahu, M.K.; Subudhi, P.K.; Awad, H. Coordinated power management and control of renewable energy sources based smart grid. Int. J. Emerg. Electr. Power IJEEPS 2021, 22, 18. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, R.; Ibrahim, I.; O’Donnell, T.; Liserre, M. Neutral current optimization control for smart transformer-fed distribution system under unbalanced loads. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 1696–1707. [Google Scholar] [CrossRef]
- Park, K.W.; Seo, H.C.; Kim, C.H.; Jung, C.S.; Yoo, Y.P.; Lim, Y.H. Analysis of the neutral current for two-step-type poles in distribution lines. IEEE Trans. Power Del. 2009, 24, 1483–1489. [Google Scholar] [CrossRef]
- Sreenivasarao, D.; Agarwal, P.; Das, B. Neutral current compensation in three-phase, four-wire systems: A review. Electr. Power Syst. Res. 2012, 86, 170–180. [Google Scholar] [CrossRef]
- Rivera, M.; Rodriguez, J.; Garcia, C.; Pena, R.; Espinoza, J. A simple predictive voltage control method with unity displacement power factor for four-leg indirect matrix converters. In Proceedings of the 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. 2–6. [Google Scholar]
- Ge, J.; Shuai, Z.; Shen, X.; Feng, Y.; Zhao, H.; Shen, Y.; Shen, Z.J. Asymmetrical Voltage Support Control of Three-Phase Four-Wire Inverters with Zero Active Power Oscillation during Grid Faults. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 906–911. [Google Scholar]
- Zhu, Z.; Chen, W. Zero sequence voltage and current control in four-wire grids-fed by grid-forming inverters. CSEE J. Power Energy Syst. 2020, 6, 8. [Google Scholar] [CrossRef]
- Ouyang, S.; Liu, J.j.; Chen, H. Arm Current Stress Reduction Technique for a Delta-Connected Solid State Transformer using Zero-Sequence Current Injection. IEEE Trans. Power Electron. 2021, 36, 12234–12250. [Google Scholar] [CrossRef]
- Wu, J.C.; Jou, H.L.; Wu, K.D.; Xiao, S.T. Single-phase inverter-based neutral-current suppressor for attenuating neutral current of three-phase four-wire distribution power system. IET Gener. Transm. Distrib. 2012, 6, 577–583. [Google Scholar] [CrossRef]
- Saim, A.; Houari, A.; Ahmed, M.A.; Djerioui, A.; Machmoum, M.; Guerrero, J.M. Adaptive reference trajectory for power quality enhancement in three-phase four-wire standalone power supply systems with nonlinear and unbalanced loads. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1593–1603. [Google Scholar] [CrossRef]
- Pan, D.; Wang, X.; Liu, F.; Shi, R. Transient stability of voltage-source converters with grid-forming control: A design-oriented study. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1019–1033. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, P. Power Quality Improvement for Grid-connected PV System Based on Distribution Static Compensator with Fuzzy Logic Controller and UVT/ADALINE-based Least Mean Square Controller. J. Mod. Power Syst. Clean Energy 2021, 9, 1289–1299. [Google Scholar] [CrossRef]
- Li, Z.; Li, D.; Xu, X.; Zhang, J. New normalized LMS adaptive filter with a variable regularization factor. J. Syst. Eng. Electron. 2019, 30, 259–269. [Google Scholar]
- Ferrer, M.; de Diego, M.; Piñero, G.; Gonzalez, A. Affine Projection Algorithm Over Acoustic Sensor Networks for Active Noise Control. IEEE/ACM Trans. AudioSpeech Lang. Process. 2020, 29, 448–461. [Google Scholar] [CrossRef]
- Jeong, J.J. A robust affine projection algorithm against impulsive noise. IEEE Signal Process. Lett. 2020, 27, 1530–1534. [Google Scholar] [CrossRef]
- Cheng, H.; Xia, Y.; Huang, Y.; Yang, L.; Mandic, D.P. A normalized complex LMS based blind I/Q imbalance compensator for GFDM receivers and its full second-order performance analysis. IEEE Trans. Signal Process. 2018, 66, 4701–4712. [Google Scholar] [CrossRef]
- Ma, W.; Zheng, D.; Tong, X.; Zhang, Z.; Chen, B. Proportionate NLMS with unbiasedness criterion for sparse system identification in the presence of input and output noises. IEEE Trans. Circuits Syst. II 2018, 65, 1808–1812. [Google Scholar] [CrossRef]
- Zhang, T.; Jiao, H.Q.; Lei, Z.C. Individual-activation-factor memory proportionate affine projection algorithm with evolving regularization. IEEE Access 2017, 5, 4939–4946. [Google Scholar] [CrossRef]
- Albu, F.; Kwan, H.K. Memory improved proportionate affine projection sign algorithm. Electron. Lett. 2012, 48, 1279–1281. [Google Scholar] [CrossRef]
- Yang, Z.; Zheng, Y.R.; Grant, S.L. Proportionate affine projection sign algorithms for network echo cancellation. IEEE Trans. AudioSpeech Lang. Process. 2011, 19, 2273–2284. [Google Scholar] [CrossRef]
- Das, R.L.; Chakraborty, M. Improving the performance of the PNLMS algorithm using l1norm regularization. IEEE/ACM Trans. AudioSpeech Lang. Process. 2016, 24, 1280–1290. [Google Scholar] [CrossRef]
- Huang, X.; Li, Y.; Zakharov, Y.V.; Li, Y.; Chen, B. Affine-Projection Lorentzian Algorithm for Vehicle Hands-Free Echo Cancellation. IEEE Trans. Veh. Technol. 2021, 70, 2561–2575. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, J.; Pang, Y. A novel combination scheme of proportionate filter. Signal Process. 2018, 143, 222–231. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dash, A.; Bagarty, D.P.; Hota, P.K.; Sahu, M.K.; Hazra, T.; Behera, S.; Behera, A.K.; Behera, S.; Nayak, A.K.; Mohapatra, S.B.; et al. Grid-Tied Distribution Static Synchronous Compensator for Power Quality Enhancement Using Combined-Step-Size Real-Coefficient Improved Proportionate Affine Projection Sign Algorithm. Energies 2022, 15, 197. https://doi.org/10.3390/en15010197
Dash A, Bagarty DP, Hota PK, Sahu MK, Hazra T, Behera S, Behera AK, Behera S, Nayak AK, Mohapatra SB, et al. Grid-Tied Distribution Static Synchronous Compensator for Power Quality Enhancement Using Combined-Step-Size Real-Coefficient Improved Proportionate Affine Projection Sign Algorithm. Energies. 2022; 15(1):197. https://doi.org/10.3390/en15010197
Chicago/Turabian StyleDash, Arobinda, Durgesh Prasad Bagarty, Prakash Kumar Hota, Manoj Kumar Sahu, Twinkle Hazra, Siddhartha Behera, Arun Kumar Behera, Siddharth Behera, Amit Kumar Nayak, Sangram Ballav Mohapatra, and et al. 2022. "Grid-Tied Distribution Static Synchronous Compensator for Power Quality Enhancement Using Combined-Step-Size Real-Coefficient Improved Proportionate Affine Projection Sign Algorithm" Energies 15, no. 1: 197. https://doi.org/10.3390/en15010197
APA StyleDash, A., Bagarty, D. P., Hota, P. K., Sahu, M. K., Hazra, T., Behera, S., Behera, A. K., Behera, S., Nayak, A. K., Mohapatra, S. B., & Ojha, S. k. (2022). Grid-Tied Distribution Static Synchronous Compensator for Power Quality Enhancement Using Combined-Step-Size Real-Coefficient Improved Proportionate Affine Projection Sign Algorithm. Energies, 15(1), 197. https://doi.org/10.3390/en15010197