
Implementation of Distributed Autonomous Control Based Battery Energy Storage System for Frequency Regulation



Abstract
1. Introduction
2. Existing Implementation of BESS for Frequency Regulation
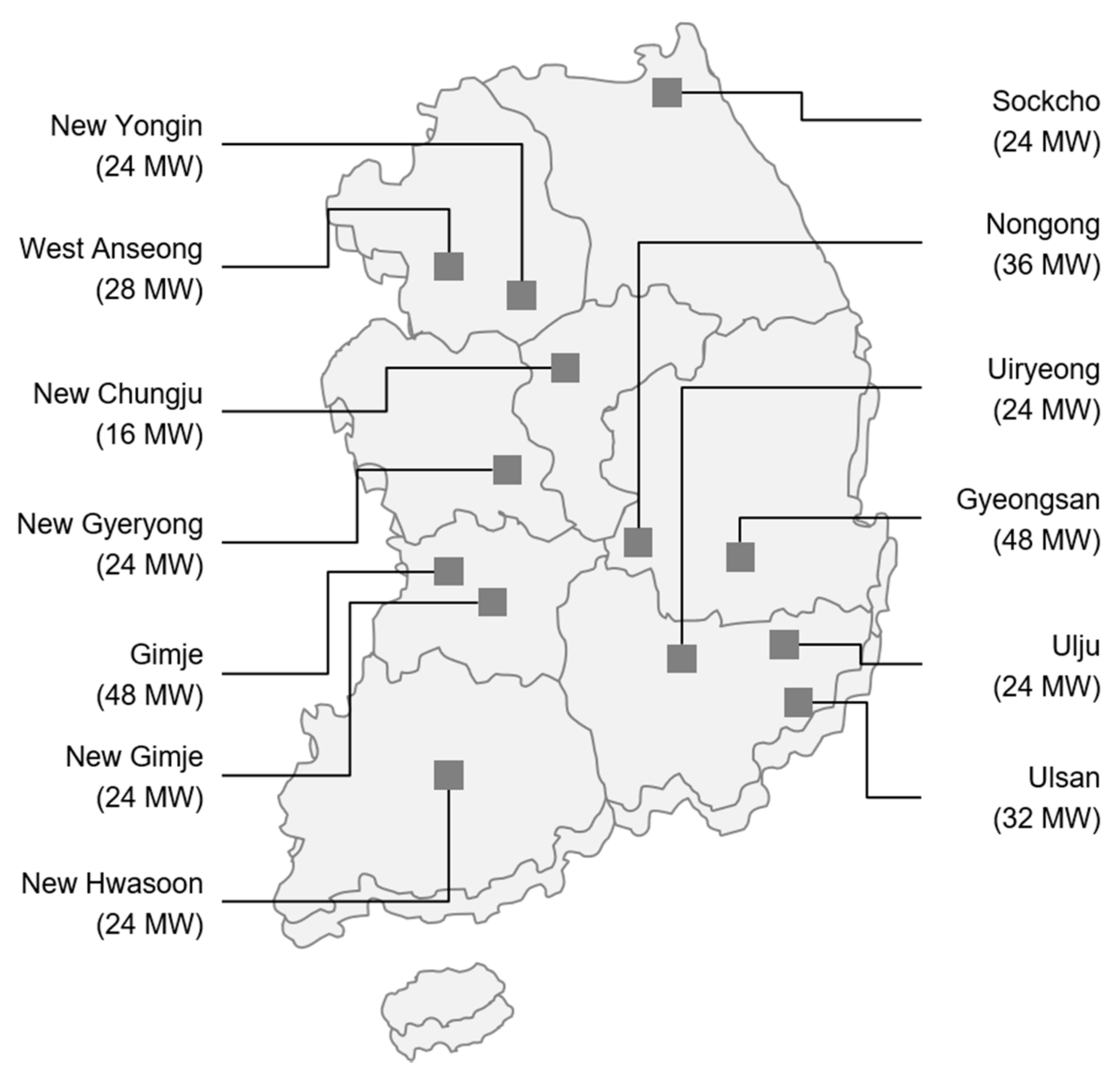
2.1. Projects of the BESS for Frequency Regulation in South Korea
2.2. Requirement of BESS for Frequency Regulation
2.3. Configuration and Operation of the BESS for Frequency Regulation
3. BESS for a Frequency Regulation through a Distributed Autonomous Control
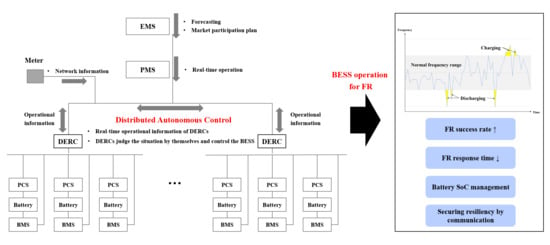
3.1. Concept of Proposed Distribution Autonomous Control for BESS
3.2. Scheme of Distributed Autonomous Control
- ①
- The EMS provides the PMS with various types of forecast information such as renewable generation, market price, and FR demand.
- ②
- The meter provides the current system information such as real-time frequency, voltage, power input and output to the PMS.
- ③
- The PMS checks the renewable generation output in real time and distributes a dedicated BESS; in addition, it separately operates the FR BESS, and each renewable energy source and FRC are charged/discharged following the PMS command.
- ①
- The EMS provides the PMS with various types of forecast information such as renewable generation, market price, and FR demand.
- ②
- The meter provides the current system information such as real-time frequency, voltage, and power input and output to the network so that the information is provided for both the PMS and DERC.
- ③
- The PMS determines only the charge/discharge capacity based on the time slot for the entire system controlled according to the scheduled plan received from the EMS and sends the information to the DERC.
- ④
- The DERC checks the real-time information from the meter and exchanges the information with each DERC according to the system status; in addition, it applies the control according to the input/out distribution and maximum utilization plan for the renewable energy sources.
- : total cumulative consumption;
- : PCS capacity;
- n: lifetime provided by the manufacturer(year);
- : battery SoH value [%]. xSoH is applied as indicated in the reference;
- : battery standby mode time rate [%]. ;
- Hstandby: battery standby mode time (if this value exceeds 24, it is 24); and
- wn is the weight factor.
- ①
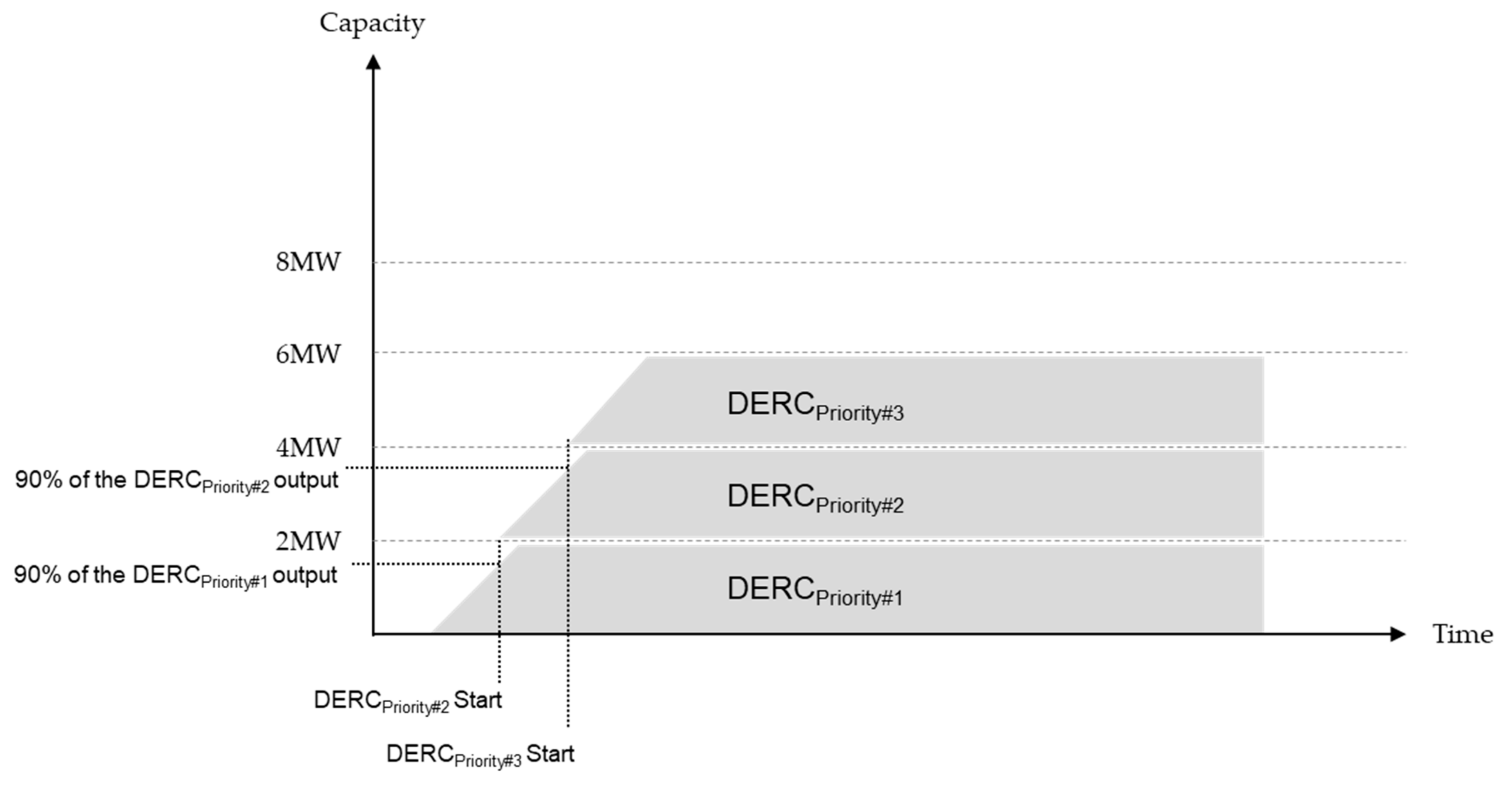
- The new PCS continues to start operation until the capacity of the PCS currently running in the DERC is larger than the total DERC output.
- ②
- The PCS in operation is operated until it can be operated while checking the battery SoC.
- ③
- If the PCS does not generate output for 60 s owing to the change in the output of the renewable energy sources, the PCS is switched to standby mode.
- ④
- Relevant status information is sent to the DERC in real time to maintain a real-time autonomous operation status.
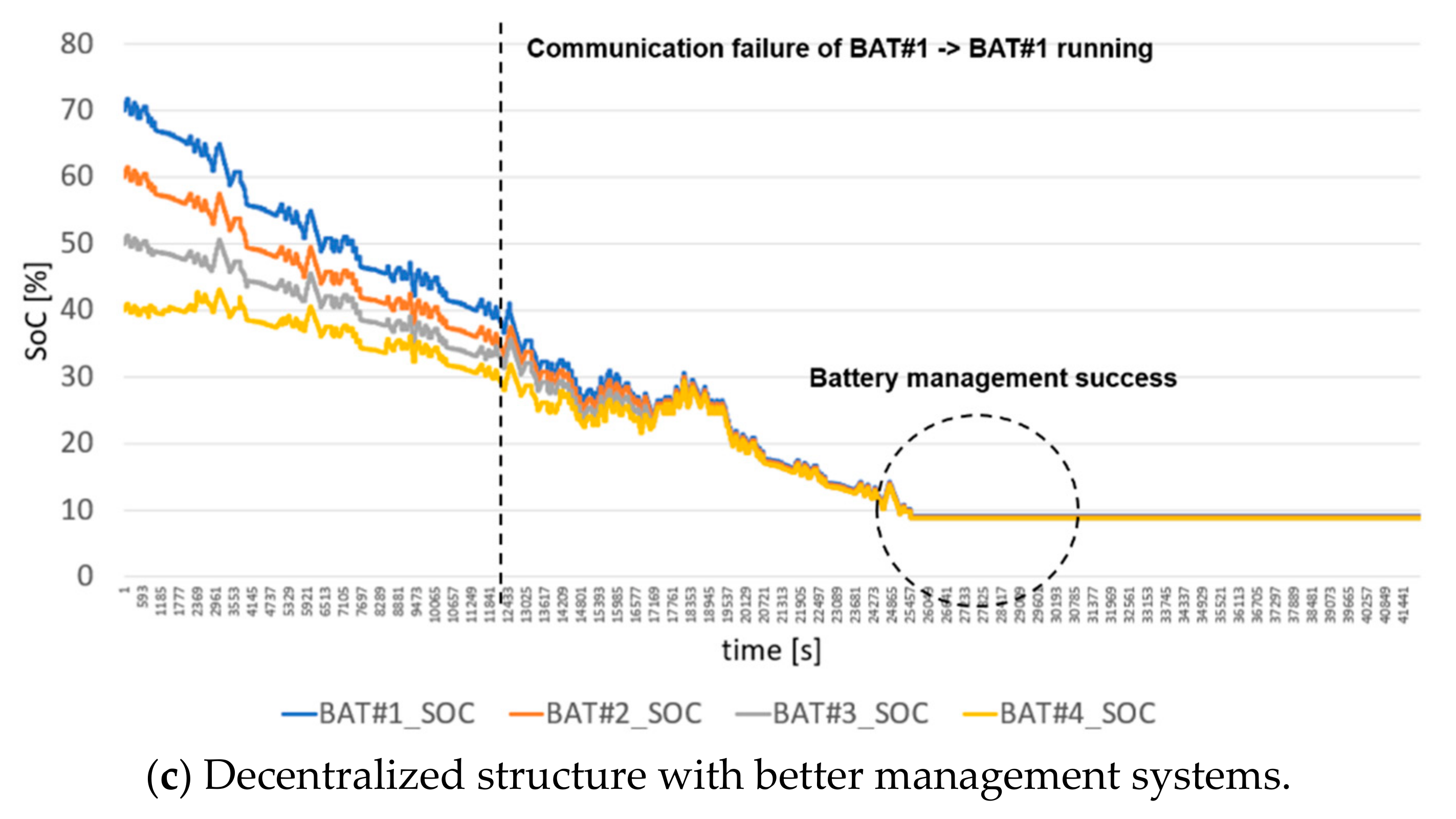
3.3. Scheme of Distributed Autonomous Control with Communication Failure
4. Case Study
4.1. Implemented System Configuration
4.2. Time Performance Test by the Proposed Distibuted Autonomous Control
- T1: GFC calculation time and transmission time of PMS + output distribution calculation time of DERC.
- T2: Time taken for command transmission from DERC to PCS + PCS response time.
- M1: Point of PMS receiving the frequency data of the simulator.
- M2: Point of command transmission from DERC to PCS.
- M3: PCS output point.
4.3. Output Distribution Test by the Proposed Distributed Autonomous Control
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Makholm, J.D. The New “Three Ds” in Regulation—Decarbonization, Decentralization, and Digitization. Nat. Gas Electr. 2018, 35, 18–22. [Google Scholar] [CrossRef]
- Al-Gabalawy, M.; Mahmoud, K.; Darwish, M.M.F.; Dawson, J.A.; Lehtonen, M.; Hosny, N.S. Reliable and Robust Observer for Simultaneously Estimating State-of-Charge and State-of-Health of LiFePO4 Batteries. Appl. Sci. 2021, 11, 3609. [Google Scholar] [CrossRef]
- Bendary, A.F.; Abdelaziz, A.Y.; Ismail, M.M.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Proposed ANFIS Based Approach for Fault Tracking, Detection, Clearing and Rearrangement for Photovoltaic System. Sensors 2021, 21, 2269. [Google Scholar] [CrossRef]
- Abaza, A.; El-Sehiemy, R.A.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Optimal Estimation of Proton Exchange Membrane Fuel Cells Parameter Based on Coyote Optimization Algorithm. Appl. Sci. 2021, 11, 2052. [Google Scholar] [CrossRef]
- Schimpe, M.; Piesch, C.; Hesse, H.C.; Paß, J.; Ritter, S.; Jossen, A. Power Flow Distribution Strategy for Improved Power Electronics Energy Efficiency in Battery Storage Systems: Development and Implementation in a Utility-Scale System. Energies 2018, 11, 533. [Google Scholar] [CrossRef]
- Eyer, J.; Corey, G. Energy Storage for the Electricity Grid: Benefits and Market Potential Assessment Guidel. Sandia Natl. Lab. SAND2010-0815 2010, 20, 5. [Google Scholar]
- Lim, G.-P.; Han, H.-G.; Chang, B.-H.; Yang, S.-K.; Yoon, Y.-B. Demonstration to Operate and Control Frequency Regulation of Power System by 4MW Energy Storage System. Trans. Korean Inst. Electr. Eng. 2014, 63, 169–177. [Google Scholar] [CrossRef]
- Lim, G.-P.; Choi, Y.-H.; Im, J.-H. Development of Operation and Control Technology of Energy Storage System for Frequency Regulation and Operation by Grid Connected Automatic Control. Trans. Korean Inst. Electr. Eng. 2016, 65, 235–241. [Google Scholar] [CrossRef]
- Dang, J.; Seuss, J.; Suneja, L.; Harley, R.G. SoC Feedback Control for Wind and ESS Hybrid Power System Frequency Regulation. IEEE J. Emerg. Sel. Topics Power Electron. 2014, 2, 79–86. [Google Scholar] [CrossRef]
- Mercier, P.; Cherkaoui, R.; Oudalov, A. Optimizing a Battery Energy Storage System for Frequency Control Application in an Isolated Power System. IEEE Trans. Power Syst. 2009, 24, 1469–1477. [Google Scholar] [CrossRef]
- Kwon, S.-J.; Kim, G.; Park, J.; Lim, J.-H.; Choi, J.; Kim, J. Research of Adaptive Extended Kalman Filter-Based SOC Estimator for Frequency Regulation ESS. Appl. Sci. 2019, 9, 4274. [Google Scholar] [CrossRef]
- Yang, J.-S.; Choi, J.-Y.; An, G.-H.; Choi, Y.-J.; Kim, M.-H.; Won, D.-J. Optimal Scheduling and Real-Time State-of-Charge Management of Energy Storage System for Frequency Regulation. Energies 2016, 9, 1010. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, Y.; Tang, Y.; Liao, K.; Syed, M.H.; Guillo-Sansano, E.; Burt, G.M. Aggregated Energy Storage for Power System Frequency Control: A Finite-Time Consensus Approach. IEEE Trans. Smart Grid 2018, 10, 3675–3686. [Google Scholar] [CrossRef]
- Ly, A.; Bashash, S. Fast Transactive Control for Frequency Regulation in Smart Grids with Demand Response and Energy Storage. Energies 2020, 13, 4771. [Google Scholar] [CrossRef]
- Cho, S.-M.; Kim, J.-S.; Kim, J.-C. Optimal Operation Parameter Estimation of Energy Storage for Frequency Regulation. Energies 2019, 12, 1782. [Google Scholar] [CrossRef]
- Yoon, M.; Lee, J.; Song, S.; Yoo, Y.; Jang, G.; Jung, S.; Hwang, S. Utilization of Energy Storage System for Frequency Regulation in Large-Scale Transmission System. Energies 2019, 12, 3898. [Google Scholar] [CrossRef]
- Lin, H.; Jin, J.; Lin, Q.; Li, B.; Wei, C.; Kang, W.; Chen, M. Distributed Settlement of Frequency Regulation Based on a Battery Energy Storage System. Energies 2019, 12, 199. [Google Scholar] [CrossRef]
- Benato, R.; Dambone Sessa, S.; Musio, M.; Palone, F.; Polito, R.M. Italian Experience on Electrical Storage Ageing for Primary Frequency Regulation. Energies 2018, 11, 2087. [Google Scholar] [CrossRef]
- Cho, S.-M.; Yun, S.-Y. Optimal Power Assignment of Energy Storage Systems to Improve the Energy Storage Efficiency for Frequency Regulation. Energies 2017, 10, 2092. [Google Scholar] [CrossRef]
- Lee, E.; Kim, J. Assessing the Benefits of Battery Energy Storage Systems for Frequency Regulation, Based on Electricity Market Price Forecasting. Appl. Sci. 2019, 9, 2147. [Google Scholar] [CrossRef]
- Andrenacci, N.; Chiodo, E.; Lauria, D.; Mottola, F. Life Cycle Estimation of Battery Energy Storage Systems for Primary Frequency Regulation. Energies 2018, 11, 3320. [Google Scholar] [CrossRef]
- Delille, G.; François, B.; Malarange, G. Dynamic frequency control support: A virtual inertia provided by distributed energy storage to isolated power systems. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenburg, Sweden, 11–13 October 2010. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (Hz) | Less than 59.8 | 59.81–59.9 | 59.91–59.95 | 59.96–60.0 | 60.01–60.05 | 60.06–60.1 | 60.11–60.2 | More than 60.2 |
|---|---|---|---|---|---|---|---|---|
| Number of cases | 0 (0%) | 26 (0%) | 3730 (0.28%) | 635,699 (51.2%) | 644,055 (48.09%) | 5690 (0.42%) | 0 | 0 |
| Number of Tests | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| response time (ms) (centralized structure) | 131 | 130 | 128 | 129 | 131 | 128 | 130 | 129 |
| Response time (ms) (distributed structure) | 115 | 118 | 117 | 115 | 116 | 118 | 115 | 115 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.-S.; Hong, J.; Choi, I.-S. Implementation of Distributed Autonomous Control Based Battery Energy Storage System for Frequency Regulation. Energies 2021, 14, 2672. https://doi.org/10.3390/en14092672
Kim H-S, Hong J, Choi I-S. Implementation of Distributed Autonomous Control Based Battery Energy Storage System for Frequency Regulation. Energies. 2021; 14(9):2672. https://doi.org/10.3390/en14092672
Chicago/Turabian StyleKim, Hyung-Seung, Junho Hong, and In-Sun Choi. 2021. "Implementation of Distributed Autonomous Control Based Battery Energy Storage System for Frequency Regulation" Energies 14, no. 9: 2672. https://doi.org/10.3390/en14092672
APA StyleKim, H.-S., Hong, J., & Choi, I.-S. (2021). Implementation of Distributed Autonomous Control Based Battery Energy Storage System for Frequency Regulation. Energies, 14(9), 2672. https://doi.org/10.3390/en14092672