
A Comparative Performance Analysis of Counter-Rotating Dual-Rotor Wind Turbines with Speed-Adding Increasers




Abstract
1. Introduction
- the development of innovative concepts of wind turbines (with horizontal axis and counter-rotating rotors [1,2,3,4], or with multiple and smaller rotors in a spatial arrangement [5]). An example of comprehensive, but not exhaustive overview of research achievements in counter-rotating wind turbine systems development, characterization and use can be found in [4];
- the effect of the number of blades of counter-rotating wind turbines on the system performance [8];
2. Problem Formulation
- The same set of rotors R1 and R2 is used in both wind systems and the same set of mechanical characteristics is considered in modeling these systems, implicitly. Conventionally, R1 is the primary wind rotor and R2—the secondary rotor. The mechanical characteristics of wind turbines can be considered as linear functions with constant coefficients in operation at a constant wind speed. However, the values of these coefficients depend on both the value of wind speed and the characteristics of wind rotor, e.g., the pitch angle of blades.
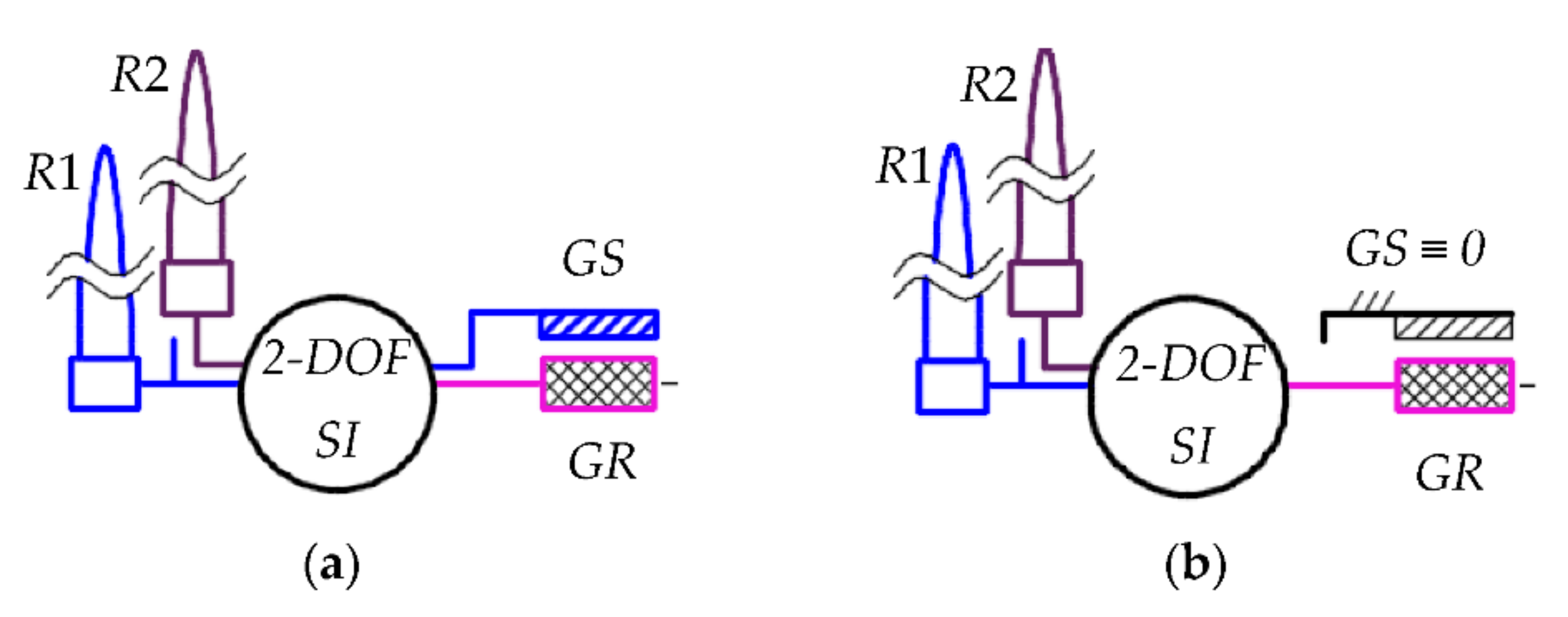
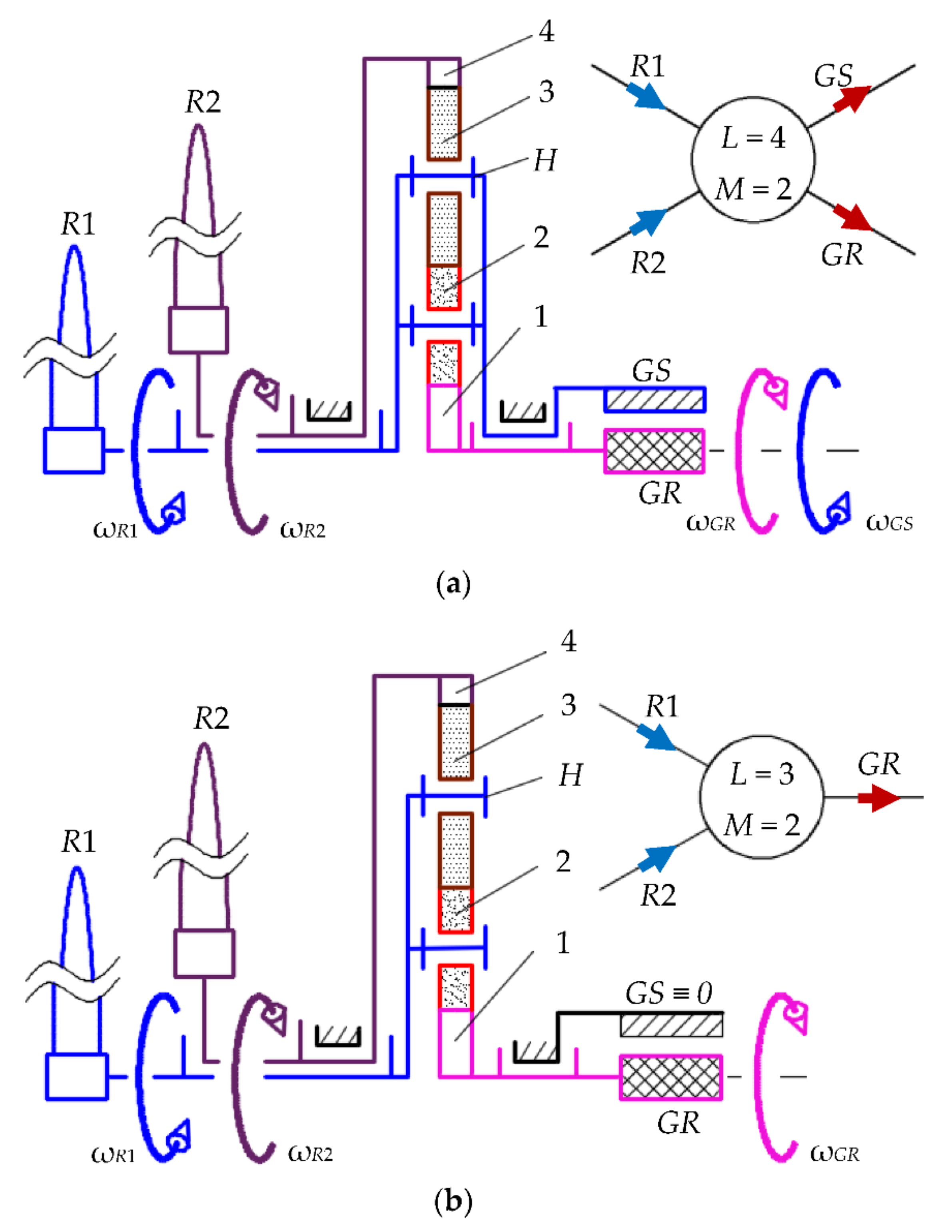
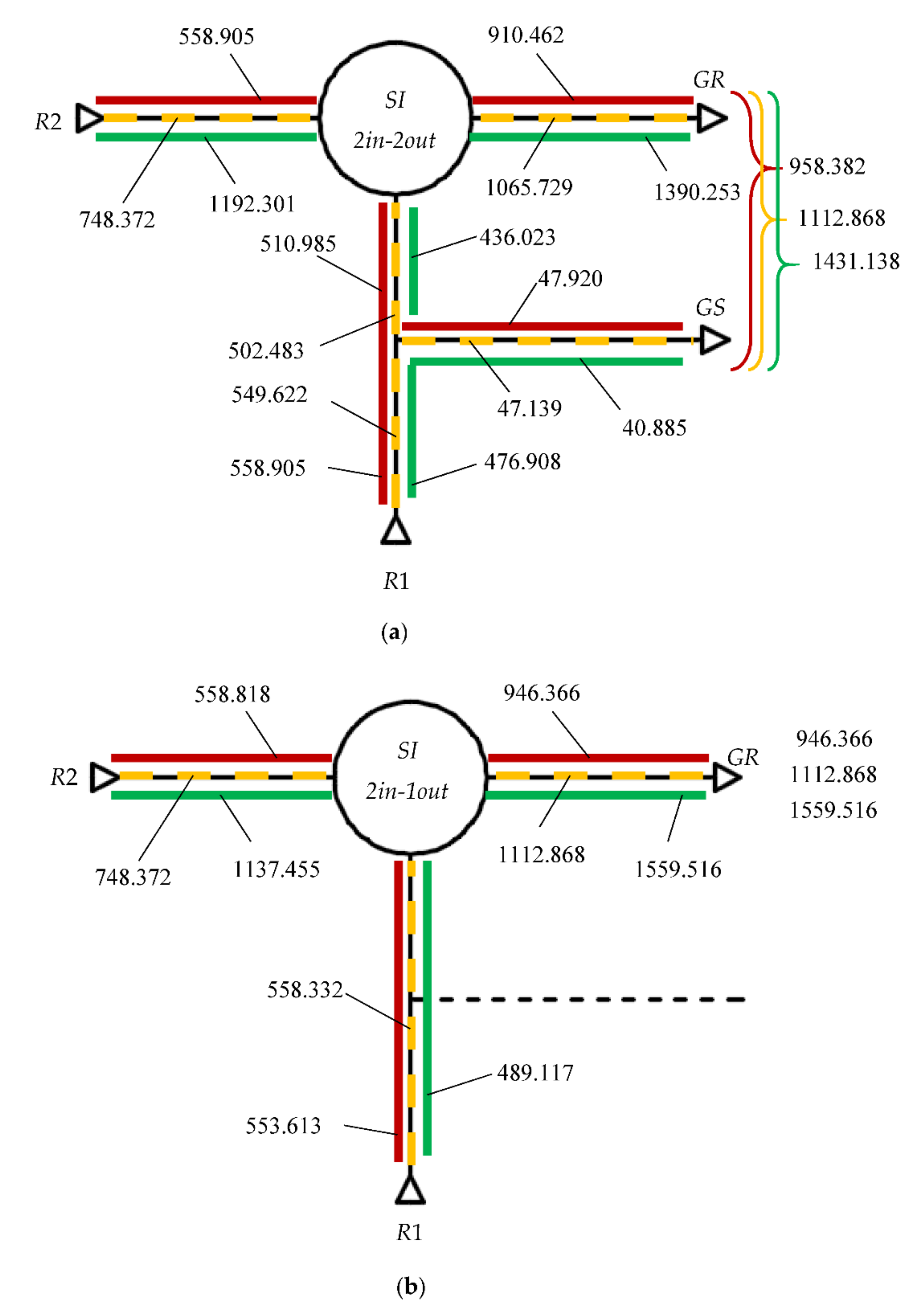
- In both cases, the speed increaser SI has the same structure and the same values for internal kinematic ratio i0 and internal efficiency η0 [49]. The mechanical transmission is a differential mechanism (2-DOF) with two inputs that are connected to wind rotors R1 and R2, and one or two outputs, through which the mechanical power is transmitted either to rotor GR of the conventional generator or to rotor GR and stator GS of the counter-rotating generator.
- The counter-rotating electric generator is obtained from the conventional one, by setting the stator GS to rotate in opposite direction to the rotor GR; the two generators have the same mechanical characteristics with respect to the relative speed of rotor GR and stator GS, i.e., ωG = ωGR − ωGS. For the sake of simplicity, the case of direct current (DC) generators is further considered, which are characterized by linear mechanical characteristics with constant coefficients, is further considered.
- The ratio of angular speeds of wind rotors is denoted by kω = −ωR2/ωR1 > 0. The ratio kω can be adjusted during wind turbine operation by changing the pitch angle of the two rotors R1 and R2, which also changes their mechanical characteristics.
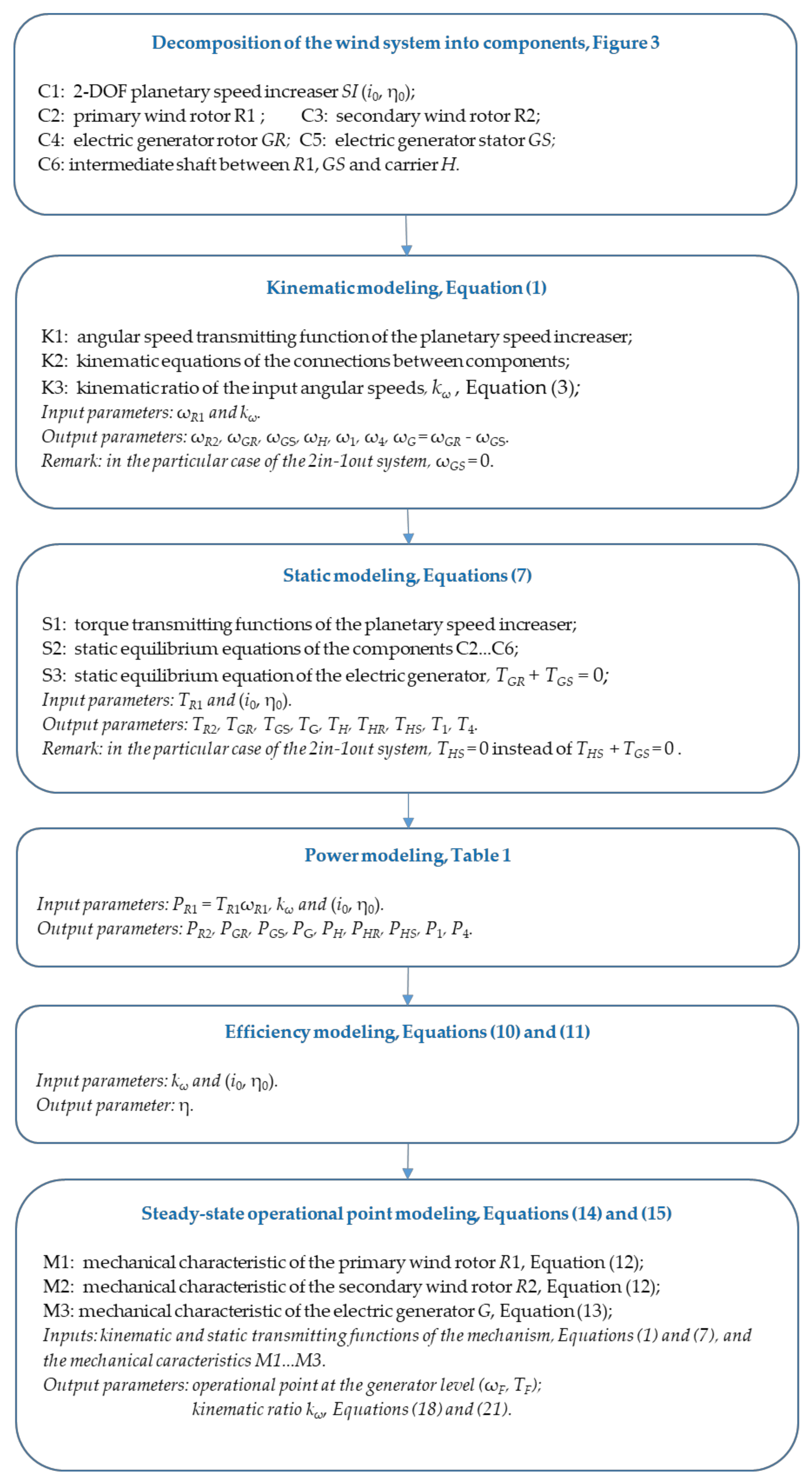
3. Analytic Modeling of Wind Systems
3.1. Kinematic Modeling
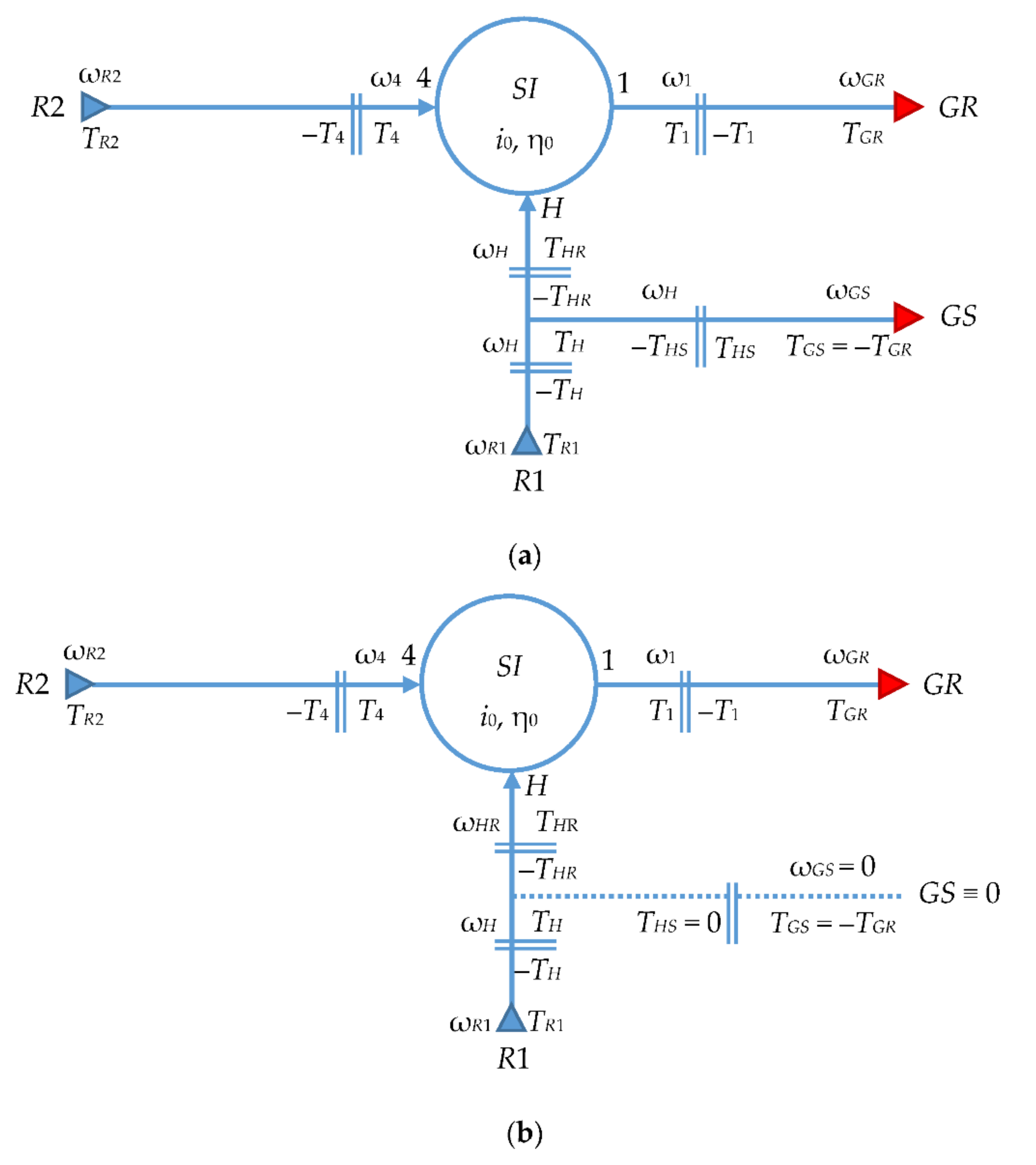
3.2. Torque Correlation and Efficiency Modeling
- two torque transmitting functions that are obtained from the static modeling of the differential planetary speed increaser; the number of functions is equal to the mechanism degree of freedom (M = 2). Additionally, the condition of static equilibrium of the planetary transmission can be added as dependent equation for verification purposes;
- a static equilibrium equation for each of the other five components of the wind system, which are obtained after breaking the connections;
- the static equilibrium equation of the electric generator, described from the condition that the torque values at rotor GR and stator GS are equal and in opposite direction.
3.3. Steady-State Operational Point
- the mechanical characteristics of the two wind rotors R1 and R2, described as linear functions with constant coefficients under stationary conditions (constant wind speed, same values of pitch angles):
- the mechanical characteristic of DC generator, represented by a linear function with constant coefficients, describing generator’s torque TG in relation to angular speed ωG. By convention, the torque of the generator is TG = TGR:
- for the wind system with counter-rotating generator, Figure 2a:
- for the wind system with conventional generator, Figure 2b:
3.4. Input Angular Speeds Ratio kω
- -
- achieve a kinematic amplification ratio, in absolute value, higher than 1 (as both the ratios i0 and kω have positive values);
- -
- have a higher efficiency, which does not depend on the kinematic configuration of the speed increaser and which is equal to the internal efficiency η0;
- -
- ensure the operation with higher angular speeds ωG and powers PG of the electric generator, for the same power of the primary wind rotor PR1 = TR1 ωR1 ;
- -
- the wind rotor R2 operates at lower torques and powers.
4. Numerical Simulations and Discussions
4.1. Scenario A
- -
- wind rotors R1 and R2 are identical, since they have the same mechanical characteristics: TR1 = −aR1ωR1 + bR1 = −18.763 ωR1 − 204.81 and TR2 = −aR2ωR2 + bR2 = −18.763 ωR2 + 204.81;
- -
- electric generators have the same mechanical characteristic −TG = −aGωR1 − bG = −;0.4ωG − 35.
4.2. Scenario B
- -
- the same wind rotor R1, with the mechanical characteristic TR1 = −aR1ωR1 + bR1 = −18.763 ωR1 − 204.81
- -
- the same wind rotor R2, with the mechanical characteristic TR2 = −aR2ωR2 + bR2 = −18.763 ωR2 + 204.81; established from the condition that the two wind turbines generate equal power;
- -
- the same electric generator, with the mechanical characteristic TG = −aGωR1 − bG = −0.4ωG − 35.
4.3. Scenario C
5. Conclusions
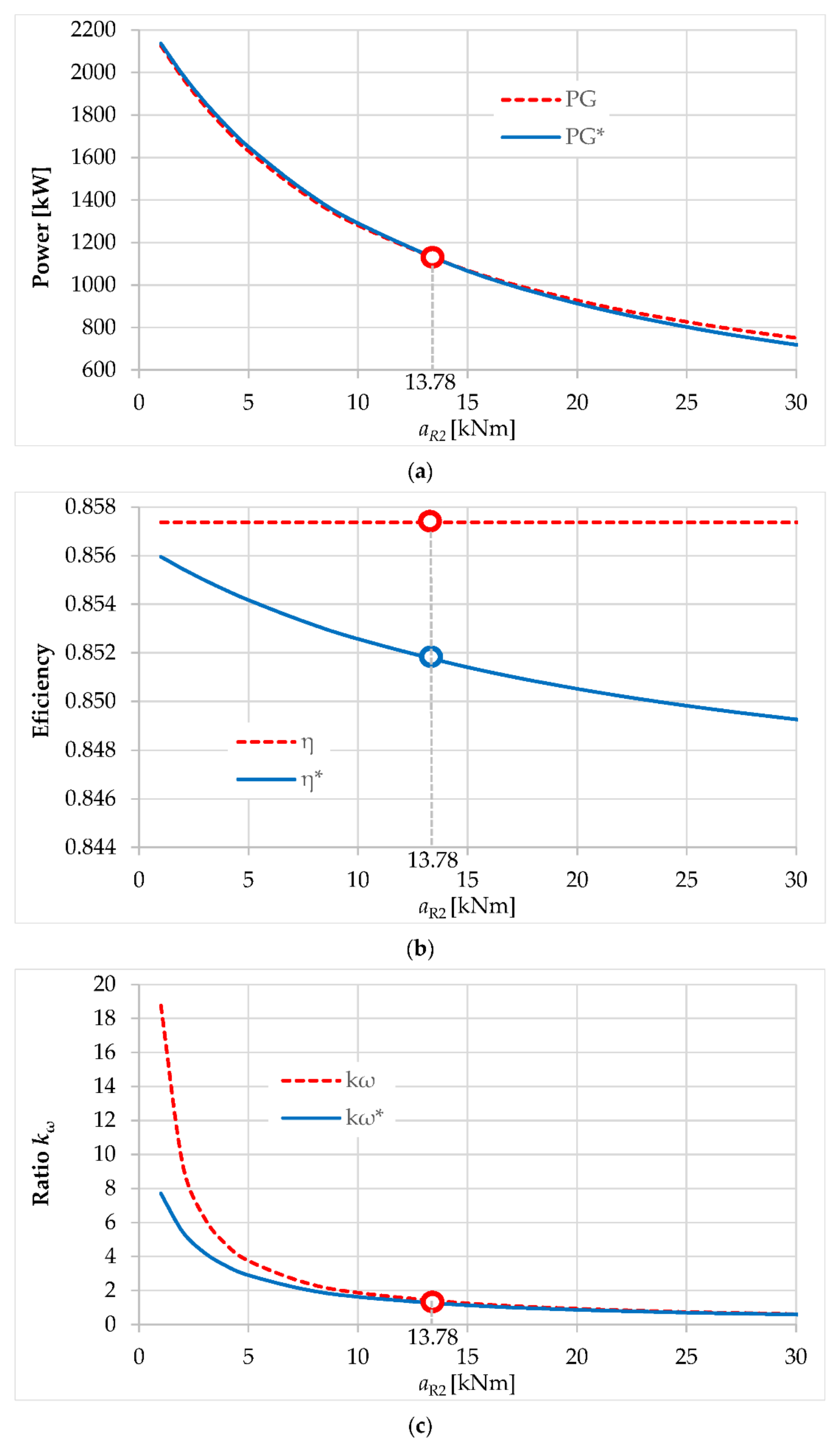
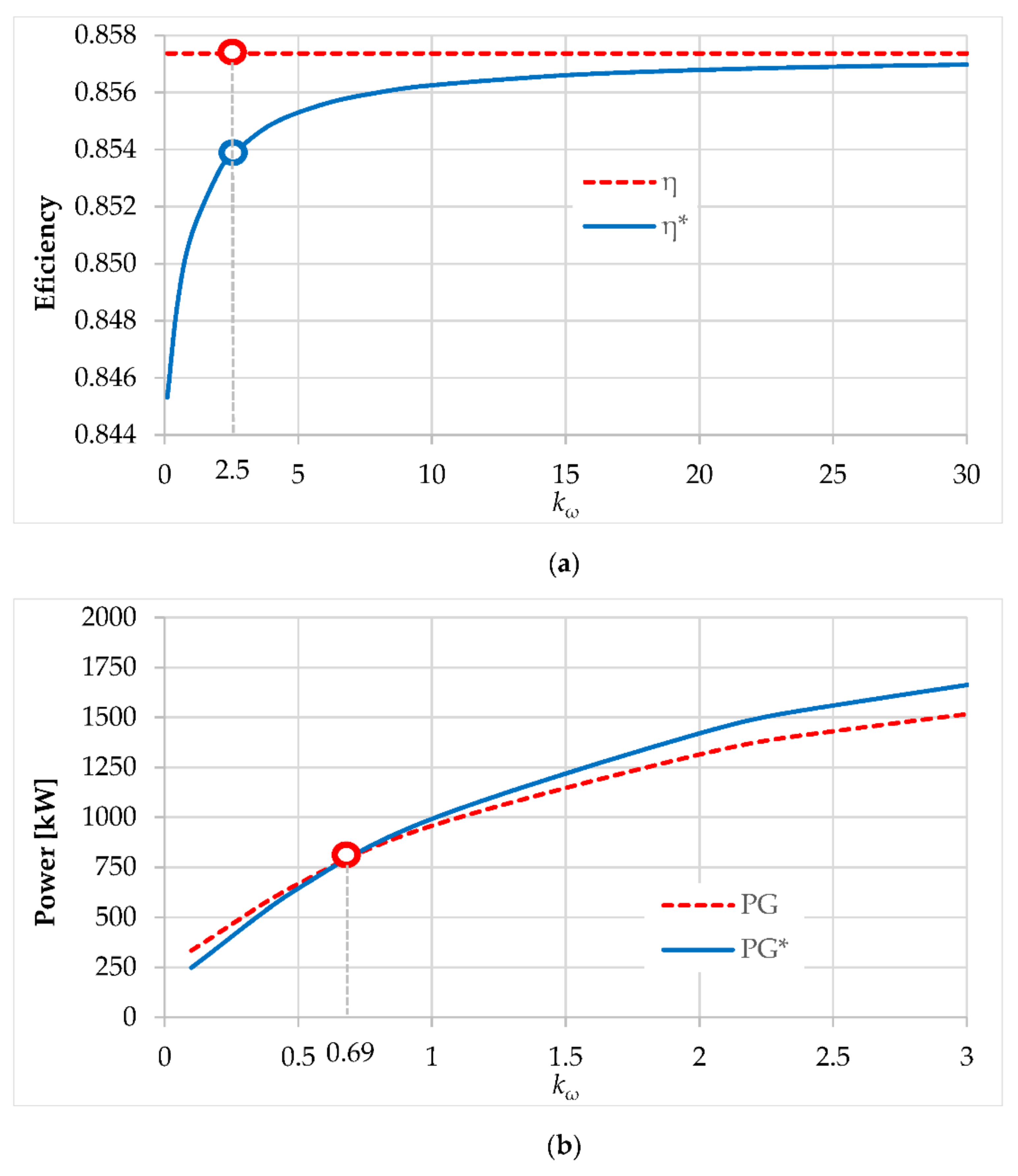
- The differential wind system with a counter-rotating electric generator, which is characterized by in-parallel transmission of power at both input and output, always ensures better efficiency of mechanical power transmission from inputs to outputs, compared to the wind system with a conventional generator. In the case of counter-rotating outputs, the efficiency of the wind system is equal to the internal efficiency η0 of the planetary transmission; instead, the efficiency of the wind turbine with a conventional generator is significantly influenced by system parameters (i.e., ratio kω, coefficients of mechanical characteristics, kinematic ratio i0), the value η0 being the upper limit of efficiency variation for this type of wind turbine.
- The energy response of the two types of wind system depends significantly on the characteristics of the selected wind rotors and electric generator. Thus, the advantage of better mechanical efficiency of wind turbines with a counter-rotating generator is accompanied by higher energy performance only in certain system configurations—generally, in the range of lower power. Considering the higher complexity of counter-rotating electric generators, due to their mobile stator, the designers’ decision to choose a type of counter-rotating wind turbine seems to be a compromise between technical, energy and economic performance.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| SI | Speed increaser | DOF | Degree of freedom |
| R1 | Primary wind rotor | M | Mechanism mobility |
| R2 | Secondary wind rotor | L | Total number of inputs and outputs |
| P | Power | G | Electric generator |
| ω | Angular speed | GR | Electric generator rotor |
| T | Torque | GS | Electric generator stator |
| kω | Ratio of the input angular speeds | i | Kinematic ratio |
| z | Number of gear teeth | i0 | Internal kinematic ratio |
| H | Satellite carrier | ia | Amplification kinematic ratio |
| F | Operational point | η | Efficiency of the speed increaser |
| a | Angular speed coefficient | η0 | Internal efficiency |
| b | Torque coefficient | ηg | Efficiency of a gear pair |
References
- Wacinski, A.; Sàrl, E. Drive Device for a Windmill Provided with Two Counter–Rotative Propellers. U.S. Patent 7,384,239, 6 September 2008. [Google Scholar]
- Brander, M. Bi-Directional Wind Turbine. U.S. Patent 0,197,639 A1, 21 August 2008. [Google Scholar]
- Jaliu, C.; Climescu, O.; Saulescu, R. Speci fic features of a counter-rotating transmission for renewable energy systems. Environ. Eng. Manag. J. 2011, 10, 1105–1113. [Google Scholar] [CrossRef]
- Oprina, G.; Chihaia, R.A.; El-Leathey, L.A.; Nicolaie, S.; Babutanu, C.A.; Voina, A. A review on counter-rotating wind tur-bines development. J. Sustain. Energy 2016, 7, 91–98. [Google Scholar]
- Shin, C. Multi-Unit Rotor Blade System Integrated Wind Turbine. U.S. Patent 5,876,181, 2 March 1999. [Google Scholar]
- Muhtadi, R.Z.; Bramantya, M.A. Experimental study of local pitch variations on electric power generated by counter rotating wind turbine with single generator without gearbox. IOP Conf. Ser. Mater. Sci. Eng. 2018, 434, 012176. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Y.; Xiao, H. Experimental study on structures of counter-rotating wind turbines. In Proceedings of the 2013 International Conference on Materials for Renewable Energy and Environment, Chengdu, China, 19–21 August 2013; Volume 1, pp. 368–372. [Google Scholar] [CrossRef]
- Pamuji, D.; Bramantya, M. Numerical Study on the Performance Of 2-Bladed and 3-Bladed Counter Rotating Wind Turbines. J. Jpn. Soc. Appl. Electromagn. Mech. 2019, 27, 169–174. [Google Scholar] [CrossRef]
- Didane, D.H.; Rosly, N.; Zulkafli, M.F.; Shamsudin, S.S. Performance evaluation of a novel vertical axis wind turbine with coaxial contra-rotating concept. Renew. Energy 2018, 115, 353–361. [Google Scholar] [CrossRef]
- West, R. Wind Turbine System. U.S. Patent 10,316,820 B2, 11 June 2019. [Google Scholar]
- Vasel-Be-Hagh, A.; Archer, C.L. Wind farms with counter-rotating wind turbines. Sustain. Energy Technol. Assess. 2017, 24, 19–30. [Google Scholar] [CrossRef]
- Jaliu, C.; Diaconescu, D.V.; Neagoe, M.; Saulescu, R. Dynamic features of speed increasers from mechatronic wind and hydro systems. Part II. Dynamic aspects. In Proceedings of the Second European Conference on Mechanism Science EUCOMES 08, Casino, Italy, 17–20 September 2008; Springer: Dordrecht, The Netherlands, 2008; pp. 365–373, ISBN 987-1-4020-8914-5. [Google Scholar]
- Bevington, C.M.; Bywaters, G.L.; Coleman, C.C.; Costin, D.P.; Danforth, W.L.; Lynch, J.A.; Rolland, R.H. Wind Turbine Having a Direct-Drive Drivetrain. U.S. Patent 7,431,567 B1, 7 October 2008. [Google Scholar]
- Marjanovic, N.; Isailovic, B.; Marjanovic, V.; Milojevic, Z.; Blagojevic, M.; Bojic, M. A practical approach to the optimization of gear trains with spur gears. Mech. Mach. Theory 2012, 53, 1–16. [Google Scholar] [CrossRef]
- Pastor, D.G.S.B.; Nalianda, D.; Sethi, V.; Midgley, R.; Rolt, A.; Novelo, D.A.B. Preliminary Design Framework for the Power Gearbox in a Contra-Rotating Open Rotor. J. Eng. Gas Turbines Power 2021, 143, 041022. [Google Scholar] [CrossRef]
- Jelaska, D.; Podrug, S.; Perkušić, M. A novel hybrid transmission for variable speed wind turbines. Renew. Energy 2015, 83, 78–84. [Google Scholar] [CrossRef]
- Saulescu, R.; Neagoe, M.; Munteanu, O.; Cretescu, N. Performance analysis of a novel planetary speed increaser used in single-rotor wind turbines with counter-rotating electric generator. IOP Conf. Ser. Mater. Sci. Eng. 2016, 147, 012090. [Google Scholar] [CrossRef]
- Neagoe, M.; Saulescu, R.; Jaliu, C.; Cretescu, N. Novel Speed increaser used in counter-rotating wind turbines. In New Advances in Mechanisms, Mechanical Transmissions and Robotics, Mechanisms and Machine Science 46; Springer: Berlin, Germany, 2017; pp. 143–151. [Google Scholar] [CrossRef]
- Jaliu, C.; Diaconescu, D.V.; Neagoe, M.; Saulescu, R. Dynamic features of speed increasers from mechatronic wind and hydro systems. Part I. Structure Kinematics. In Proceedings of the Second European Conference on Mechanism Science EUCOMES 08, Casino, Italy, 17–20 September 2008; Springer: Dordrecht, The Netherlands, 2008; pp. 355–363, ISBN 987-1-4020-8914-5. [Google Scholar]
- Erturk, E.; Sivrioglu, S.; Bolat, F.C. Analysis Model of a Small Scale Counter-Rotating Dual Rotor Wind Turbine with Double Rotational Generator Armature. Int. J. Renew. Energy Res. 2018, 8, 1849–1858. [Google Scholar]
- Bharani, R.; Sivaprakasam, A. A Review Analysis on Performance and Classification of Wind Turbine Gearbox Technologies. IETE J. Res. 2020, 1–15. [Google Scholar] [CrossRef]
- Fan, Z.; Zhu, C.; Li, X.; Liang, C. The transmission characteristic for the improved wind turbine gearbox. Energy Sci. Eng. 2019, 7, 1368–1378. [Google Scholar] [CrossRef]
- Qiu, J.; Liu, B.; Dong, H.; Wang, D. Type Synthesis of Gear-box in Wind Turbine. Procedia Comput. Sci. 2017, 109, 809–816. [Google Scholar] [CrossRef]
- Climescu, O.; Jaliu, C.; Saulescu, R. Comparative Analysis of Horizontal Small Scale Wind Turbines for a Specific Applica-tion. In Proceedings of the 14th IFToMM World Congress, Taipei, Taiwan, 25–30 October 2015. [Google Scholar] [CrossRef]
- Saulescu, R.; Neagoe, M.; Jaliu, C. Improving the Energy Performance of Wind Turbines Implemented in the Built Environment Using Counter-Rotating Planetary Transmissions. IOP Conf. Ser. Mater. Sci. Eng. 2016, 147, 012089. [Google Scholar] [CrossRef]
- Saulescu, R.; Jaliu, C.; Neagoe, M. Structural and Kinematic Features of a 2 DOF Speed Increaser for Renewable Energy Systems. Appl. Mech. Mater. 2016, 823, 367–372. [Google Scholar] [CrossRef]
- Saulescu, R.; Neagoe, M.; Jaliu, C.; Munteanu, O. Comparative Analysis of Two Wind Turbines with Planetary Speed Increaser in Steady-State. Appl. Mech. Mater. 2016, 823, 355–360. [Google Scholar] [CrossRef]
- Saulescu, R.; Jaliu, C.; Munteanu, O.; Climescu, O. Planetary Gear for Counter-Rotating Wind Turbines. Appl. Mech. Mater. 2014, 658, 135–140. [Google Scholar] [CrossRef]
- Saulescu, R.; Jaliu, C.; Climescu, O.; Diaconescu, D. On the use of 2 DOF planetary gears as “speed increaser” in small hydros and wind turbines. In Proceedings of the ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2011, Washington, DC, USA, 25–31 August 2011. [Google Scholar]
- Herzog, R.; Schaffarczyk, A.P.; Wacinski, A.; Zürcher, O. Performance and stability of a counter–rotating windmill using a planetary gearing: Measurements and Simulation. In Proceedings of the European Wind Energy Conference & Exhibition, Warsaw, Poland, 20–23 April 2010. [Google Scholar]
- Neagoe, M.; Saulescu, R.; Jaliu, C. Design and Simulation of a 1 DOF Planetary Speed Increaser for Counter-Rotating Wind Turbines with Counter-Rotating Electric Generators. Energies 2019, 12, 1754. [Google Scholar] [CrossRef]
- Saulescu, R.; Neagoe, M.; Jaliu, C. Conceptual Synthesis of Speed Increasers for Wind Turbine Conversion Systems. Energies 2018, 11, 2257. [Google Scholar] [CrossRef]
- Neagoe, M.; Jaliu, C.; Saulescu, R.; Simionescu, P. Steady-State Response of a Dual-Rotor Wind Turbine with Counter-Rotating Electric Generator and Planetary Gear Increaser. In Proceedings of the USCToMM MSR 2020, Rapid City, SD, USA, 14–16 May 2020; pp. 106–115. [Google Scholar] [CrossRef]
- Zhao, M.; Ji, J. Dynamic Analysis of Wind Turbine Gearbox Components. Energies 2016, 9, 110. [Google Scholar] [CrossRef]
- Dong, H.; Zhang, C.; Wang, D.; Xu, S.; Qiu, J. Dynamic characteristics of gear box with PGT for wind turbine. Procedia Comput. Sci. 2017, 109, 801–808. [Google Scholar] [CrossRef]
- Vázquez-Hernández, C.; Serrano-González, J.; Centeno, G. A Market-Based Analysis on the Main Characteristics of Gearboxes Used in Onshore Wind Turbines. Energies 2017, 10, 1686. [Google Scholar] [CrossRef]
- Farahani, E.; Hosseinzadeh, N.; Ektesabi, M. Comparison of fault-ride-through capability of dual and single-rotor wind turbines. Renew. Energy 2012, 48, 473–481. [Google Scholar] [CrossRef]
- Kutt, F.; Blecharz, K.; Karkosiński, D. Axial-Flux Permanent-Magnet Dual-Rotor Generator for a Counter-Rotating Wind Turbine. Energies 2020, 13, 2833. [Google Scholar] [CrossRef]
- Mirnikjoo, S.; Abbaszadeh, K.; Abdollahi, S.E. Multi-Objective Design Optimization of a Double-Sided Flux Switching Permanent Magnet Generator for Counter-Rotating Wind Turbine Applications. IEEE Trans. Ind. Electron. 2020, 1. [Google Scholar] [CrossRef]
- Zhamalov, A.Z.; Obozov, A.D.; Kunelbaev, M.M.; Baikadamova, L.S. Capacity and Power Characteristics of Disk Generator with Counter-Rotation of Double-Rotor Wind Turbine. Middle-East J. Sci. Res. 2013, 15, 1655–1662. [Google Scholar] [CrossRef]
- Kanemoto, T.; Galal, A.M. Development of Intelligent Wind Turbine Generator with Tandem Wind Rotors and Double Rotational Armatures. JSME Int. J. Ser. B 2006, 49, 450–457. [Google Scholar] [CrossRef]
- Caiozza, J. Wind Driven Electric Generator Apparatus. U.S. Patent 7,227,276 B2, 5 June 2007. [Google Scholar]
- Pacholczyk, M.; Karkosiński, D. Parametric Study on a Performance of a Small Counter-Rotating Wind Turbine. Energies 2020, 13, 3880. [Google Scholar] [CrossRef]
- Saulescu, R.; Neagoe, M.; Cretescu, N. Comparative analysis of two wind turbines with counter-rotating vs. fixed-stator electric generator. IOP Conf. Ser. Mater. Sci. Eng. 2020, 997, 012091. [Google Scholar] [CrossRef]
- Fan, G.-F.; Qing, S.; Wang, H.; Hong, W.-C.; Li, H.-J. Support Vector Regression Model Based on Empirical Mode Decomposition and Auto Regression for Electric Load Forecasting. Energies 2013, 6, 1887–1901. [Google Scholar] [CrossRef]
- Hong, W.-C.; Fan, G.-F. Hybrid Empirical Mode Decomposition with Support Vector Regression Model for Short Term Load Forecasting. Energies 2019, 12, 1093. [Google Scholar] [CrossRef]
- Pfaffel, S.; Faulstich, S.; Rohrig, K. Performance and Reliability of Wind Turbines: A Review. Energies 2017, 10, 1904. [Google Scholar] [CrossRef]
- Neagoe, M.; Saulescu, R.; Jaliu, C.; Simionescu, P.A. A Generalized Approach to the Steady-State Efficiency Analysis of Torque-Adding Transmissions Used in Renewable Energy Systems. Energies 2020, 13, 4568. [Google Scholar] [CrossRef]
- Miloiu, G.; Dudita, F.; Diaconescu, D. Modern Mechanical Transmissions; Tehnica: Bucharest, Romania, 1980. (In Romanian) [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Wind System 2 in-2 out, Figure 2a | Wind System 2 in-1 out, Figure 2b |
|---|---|---|---|
| Amplification kinematic ratio | |||
| Efficiency | |||
| Angular speed of the generator | |||
| Generator torque | |||
| Generator power | |||
| Angular speed of the generator rotor | |||
| Generator rotor torque | |||
| Generator rotor power | |||
| Angular speed of the generator stator | 0 | ||
| Generator stator torque | |||
| Generator stator power | 0 | ||
| Angular speed of the carrier H | |||
| H carrier torque | |||
| H carrier power | |||
| Angular speed of the shaft HR | |||
| HR shaft torque | |||
| HR shaft power | |||
| Angular speed of shaft HS | 0 | ||
| HS shaft torque | |||
| HS shaft power | 0 | ||
| Angular speed of gear 4 | |||
| Torque on gear 4 | |||
| Power of gear 4 |
| Parameter | Wind System 2 in-2 out, Figure 2a | Wind System 2 in-1 out, Figure 2b |
|---|---|---|
| [s−1] | −5.470 | −5.989 |
| [kNm] | −102.176 | −92.438 |
| [kW] | 558.905 | 553.613 |
| [s−1] | 5.470 | 5.527 |
| [kNm] | 102.176 | 101.106 |
| [kW] | 558.905 | 558.818 |
| [s−1] | 109.401 | 109.171 |
| [kNm] | −8.760 | −8.669 |
| [kW] | −958.382 | −946.366 |
| 0.8573 | 0.8507 | |
| 1.000 | 0.923 | |
| −20.000 | −17.209 |
| Parameter | Wind System 2 in-2 out, Figure 2a | Wind System 2 in-1 out, Figure 2b |
|---|---|---|
| [s−1] | −4.754 | −5.283 |
| [kNm] | −115.604 | −105.693 |
| [kW] | 549.622 | 558.332 |
| [s−1] | 6.474 | 6.474 |
| [kNm] | 115.604 | 115.604 |
| [kW] | 748.372 | 748.372 |
| [s−1] | 112.279 | 112.279 |
| [kNm] | −9.912 | −9.912 |
| [kW] | −1112.868 | −1112.868 |
| 0.8574 | 0.8516 | |
| 1.362 | 1.225 | |
| −23.616 | −21.255 |
| Parameter | Wind System 2 in-2 out, Figure 2a | Wind System 2 in-1 out, Figure 2b |
|---|---|---|
| [s−1] | −3.367 | −3.529 |
| [kNm] | −141.630 | −138.592 |
| [kW] | 476.908 | 489.117 |
| [s−1] | 8.418 | 8.823 |
| [kNm] | 141.630 | 151.589 |
| [kW] | 1192.301 | 1337.455 |
| [s−1] | 117.857 | 119.992 |
| [kNm] | −12.143 | −12.997 |
| [kW] | −1431.138 | −1559.516 |
| 0.8574 | 0.8538 | |
| −35.000 | −34.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saulescu, R.; Neagoe, M.; Jaliu, C.; Munteanu, O. A Comparative Performance Analysis of Counter-Rotating Dual-Rotor Wind Turbines with Speed-Adding Increasers. Energies 2021, 14, 2594. https://doi.org/10.3390/en14092594
Saulescu R, Neagoe M, Jaliu C, Munteanu O. A Comparative Performance Analysis of Counter-Rotating Dual-Rotor Wind Turbines with Speed-Adding Increasers. Energies. 2021; 14(9):2594. https://doi.org/10.3390/en14092594
Chicago/Turabian StyleSaulescu, Radu, Mircea Neagoe, Codruta Jaliu, and Olimpiu Munteanu. 2021. "A Comparative Performance Analysis of Counter-Rotating Dual-Rotor Wind Turbines with Speed-Adding Increasers" Energies 14, no. 9: 2594. https://doi.org/10.3390/en14092594
APA StyleSaulescu, R., Neagoe, M., Jaliu, C., & Munteanu, O. (2021). A Comparative Performance Analysis of Counter-Rotating Dual-Rotor Wind Turbines with Speed-Adding Increasers. Energies, 14(9), 2594. https://doi.org/10.3390/en14092594