
Application of an Artificial Neural Network for Measurements of Synchrophasor Indicators in the Power System



Abstract
1. Introduction
2. Methodology of the Studies
2.1. The Requirements Imposed on the Estimation Methods of Phasor Parameters
- The sinusoidal function with a constant magnitude of 1 and a constant frequency of 50 Hz (denoted as function 1);
- Functions with a constant frequency of 50 ± 2 Hz for the P class and of 50 ± 5 Hz for the M class (denoted as functions 2 and 3);
- Functions with a magnitude change between 0.1 and 2. The authors assumed the values of 0.1, 0.8, 1.2 and 2 (denoted as functions 4, 5, 6 and 7, respectively);
- Functions including the harmonics from the 2nd to the 50th with a magnitude of 0.01 for the P class and 0.1 for the M class (denoted as functions from 8 to 56);
- Functions including out-of-band interference. These exist only in the M class and have a magnitude of 0.1. The input test signal frequencies are as follows:
- f = f0 − (FS/2) − (0.1 Hz × 2n) for n = 0, 1, 2, … to f ≤ 10 Hz for n = 0, 1, 2, … to f ≤ 10 Hz; i.e., they include the following frequency values: 12.2, 18.6, 21.8, 23.4, 24.2, 24.6, 24.8 and 24.9 Hz (denoted as functions from 57 to 64);
- f = f0 + (FS/2) + (0.1 Hz × 2n) for n = 0, 1, 2, … to f ≥ 2 × f0 Hz; i.e., they include the following frequency values: 75.1, 75.2, 75.4, 75.8, 76.6, 78.2, 81.4 and 87.8 Hz (denoted as functions from 65 to 72);
- Where FS—the reporting frequency—is assumed to be 50 samples/s. Assuming the reporting frequency to be 50 samples/s means that the estimated synchrophasor parameters should be obtained from the signal of the maximum length of 0.02 s, irrespective of the network frequency;
- 6
- Functions with a magnitude modulation, where the signal is a sum of the base signal and the sinusoidal signal of a magnitude of 0.1 and the frequency changes between 0.1 and 2 Hz for the P class and between 0.1 and 5 Hz for the M class, with a change occurring every 0.1 Hz (denoted as functions 57 to 76 for the P class and functions 73 to 122 for the M class);
- 7
- Functions with a phase modulation, where the base signal phase additionally contains the sinusoidal signal with a magnitude of 0.1 rad and the frequency changing between 0.1 and 2 Hz for the P class and between 0.1 and 5 Hz for the M class, with a change occurring every 0.1 Hz (denoted as functions 77 to 96 for the P class and functions 123 to 172 for the M class);
- 8
- Functions with linear ramp of system frequency, where the ramp range is ±2 Hz for the P class and ±5 Hz for the M class, with a ramp rate of 1 Hz/s (denoted as functions 97 and 98 for the P class and functions 173 and 174 for the M class);
- 9
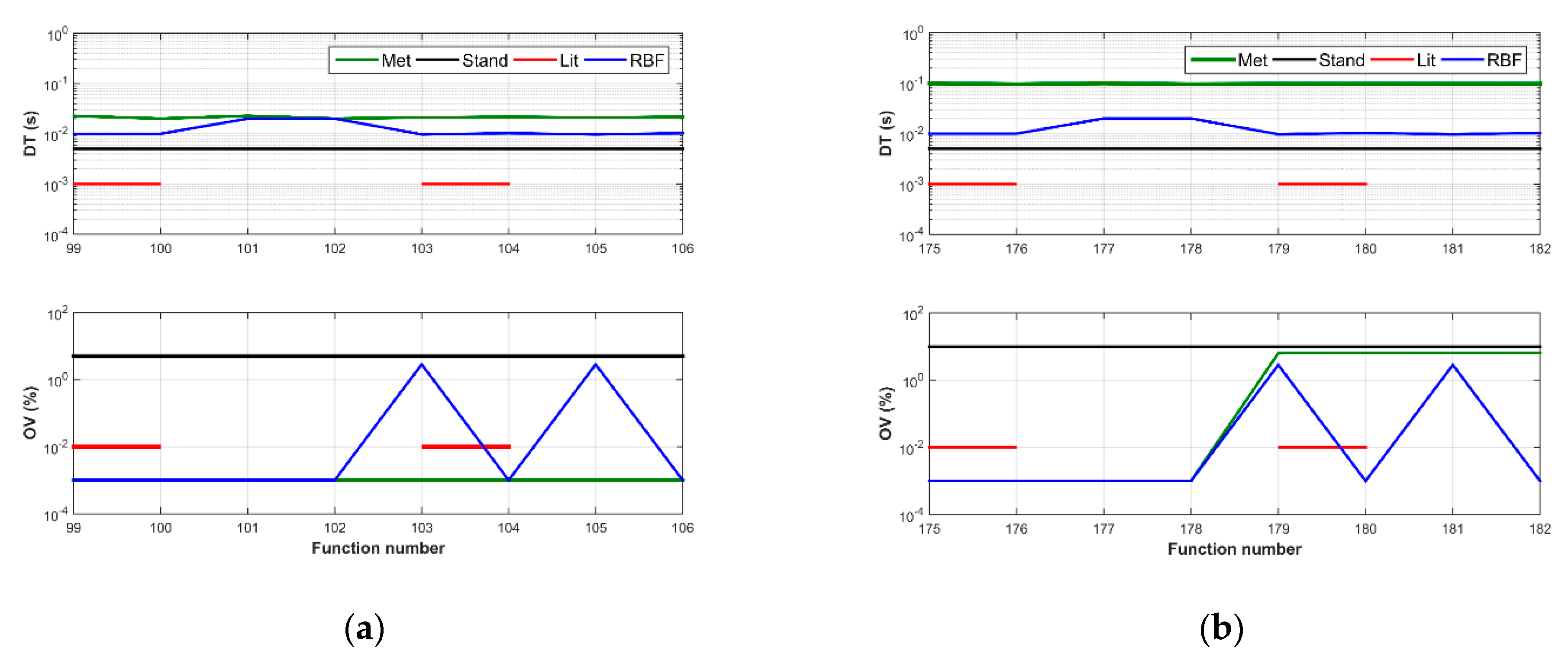
- Functions with a step magnitude change of ±0.1 and with a step occurring at the beginning and in the middle of the measurement window (denoted as functions 99 to 102 for the P class and functions 175 to 178 for the M class); the functions having a step occurring in the middle of the measurement window are additional testing functions implemented by authors for research measurements;
- 10
- Functions with a step phase change of ±π/10 and with a step occurring at the beginning and in the middle of the measurement window (denoted as functions 103 to 106 for the P class and functions 179 to 182 for the M class).
- Response time of TVE (RT-TVE), which means a time difference between the point at which the TVE value decreases below 1% and the point at which the TVE increases above 1%;
- Response time of FE (RT-FE) which means a time difference as defined in point 4 but for the FE value of 0.005 Hz;
- Response time of RFE (RT-RFE), which means a time difference as defined in point 4 but for the RFE value of 0.4 Hz/s for the P class and 0.1 Hz/s for the M class;
- Delay time (DT), which is a time difference between the point at which the magnitude or phase reach 50% of the step value and the initial step value;
- Overshoot/undershoot value (OV), which is a difference between the maximum magnitude or phase value following a step and the step value, which is further divided by the step value.
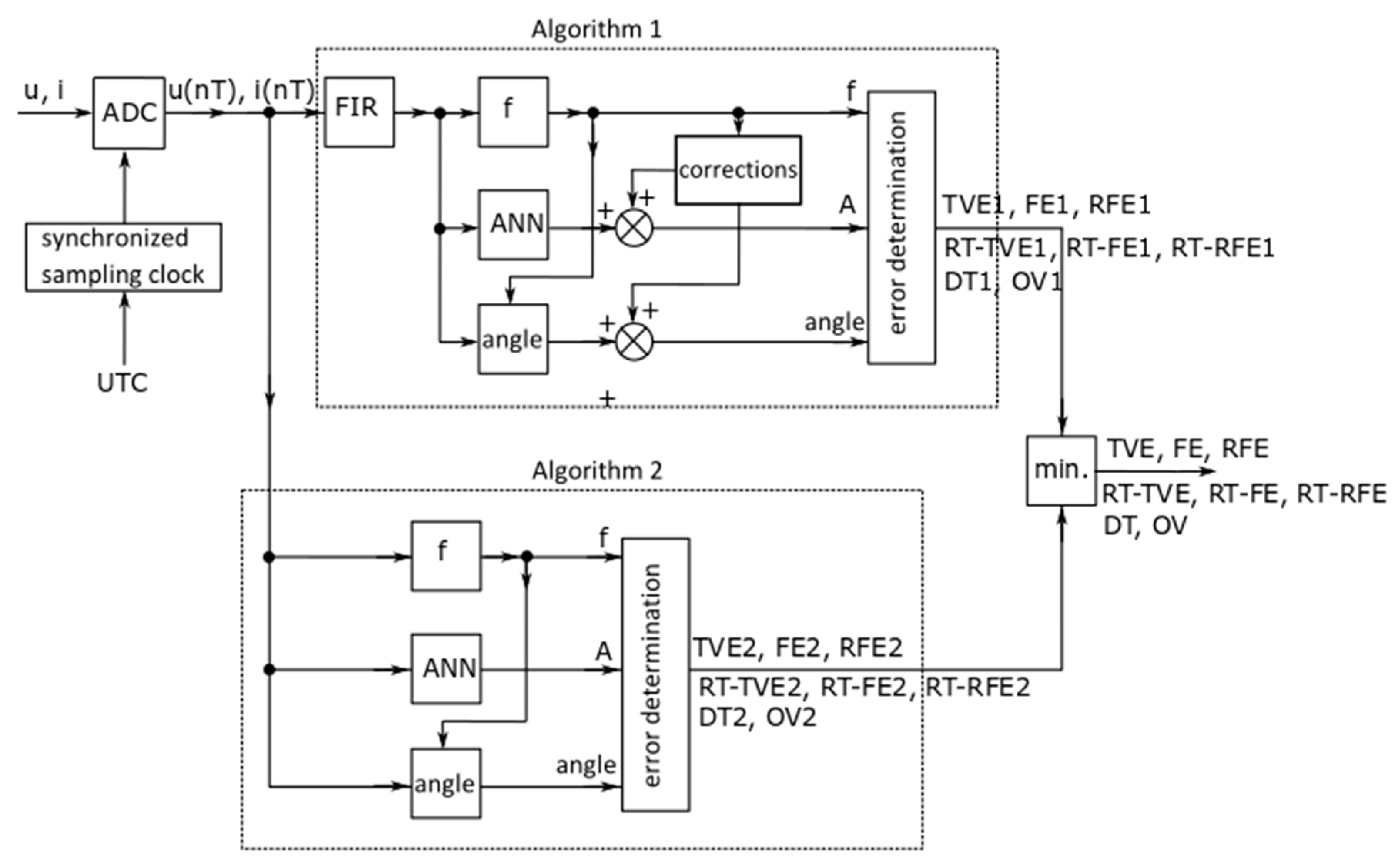
2.2. The Flowchart of the Estimation Algorithm of the Phasor Parameters
- The filtering of the input signal was conducted by means of the FIR filter with a Kaiser window. The filter parameters were as follows: frequency of a passband edge of 50 Hz, frequency of a stopband edge of 100 Hz, passband ripple of 0.001 pu, stopband ripple of 0.1 pu, sampling frequency of fp = 12,800 Hz, order of 929 and Kaiser window beta of 5.6533.
- The zero-crossing method was used to estimate the frequency and phase;
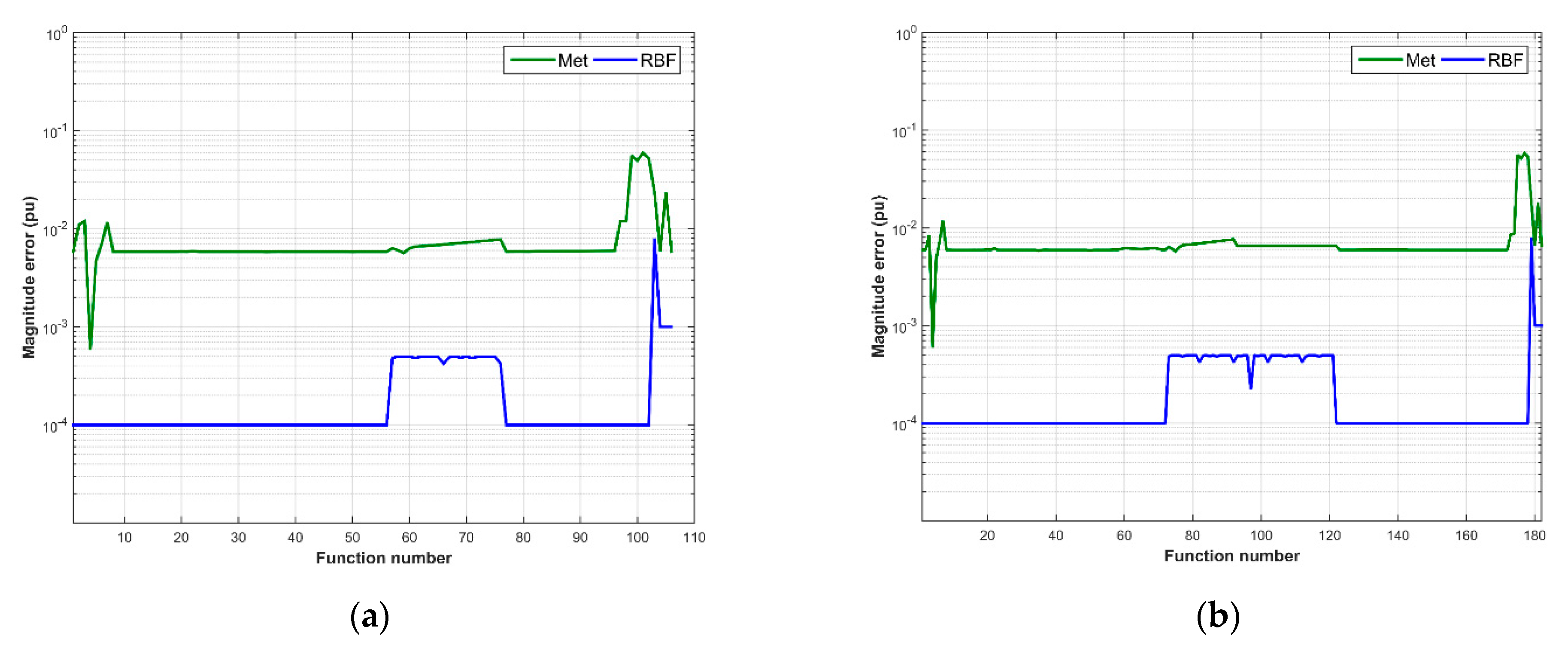
- An RBF of the ANN was used to estimate the magnitude;
- A frequency-dependent algorithm to make corrections to the estimation results of the magnitude and phase was used.
2.3. The Phasor Magnitude Estimation Algorithm Using ANN
2.4. The Synchrophasor Frequency and Phase Estimation Algorithm Using the Zero-Crossing Method
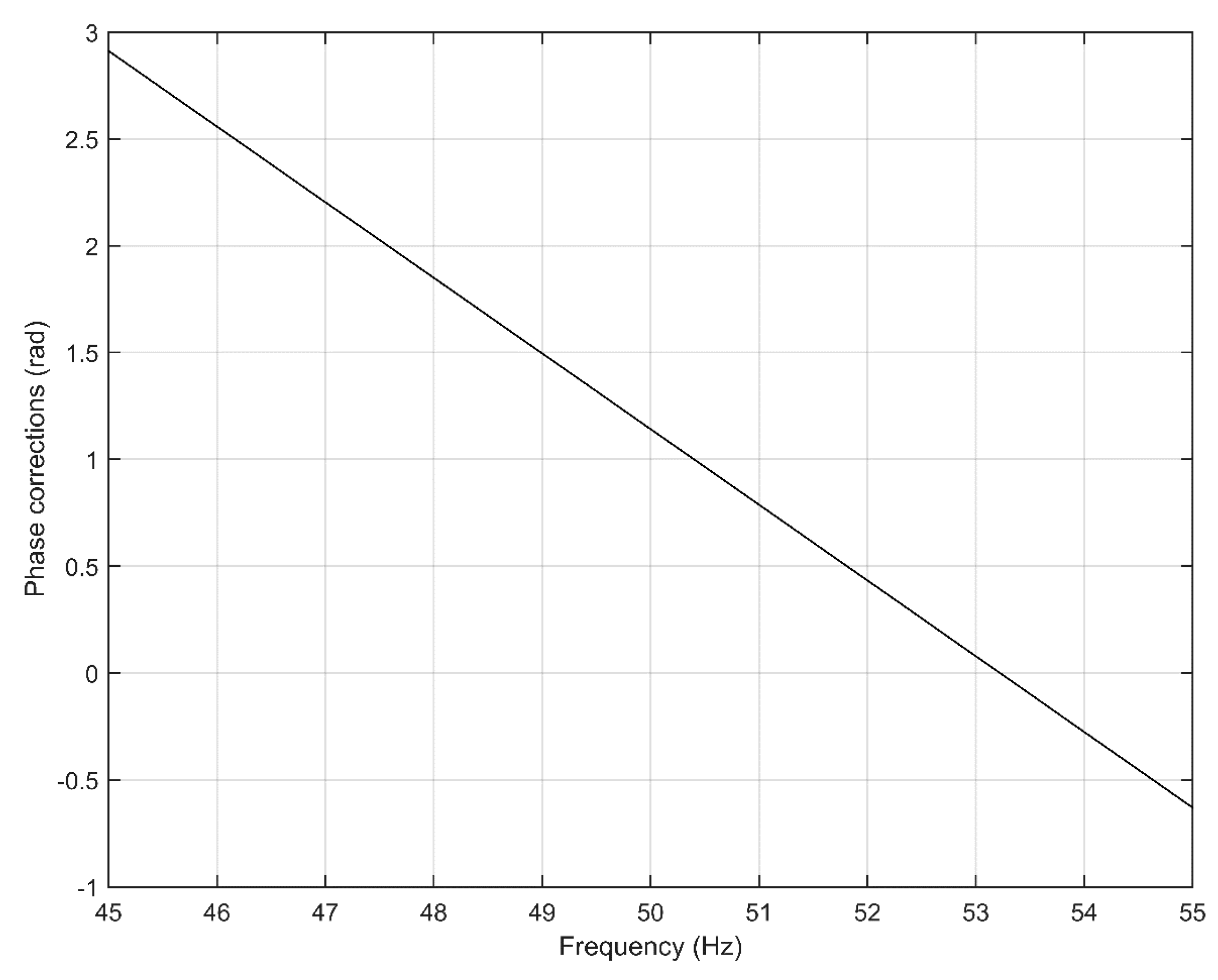
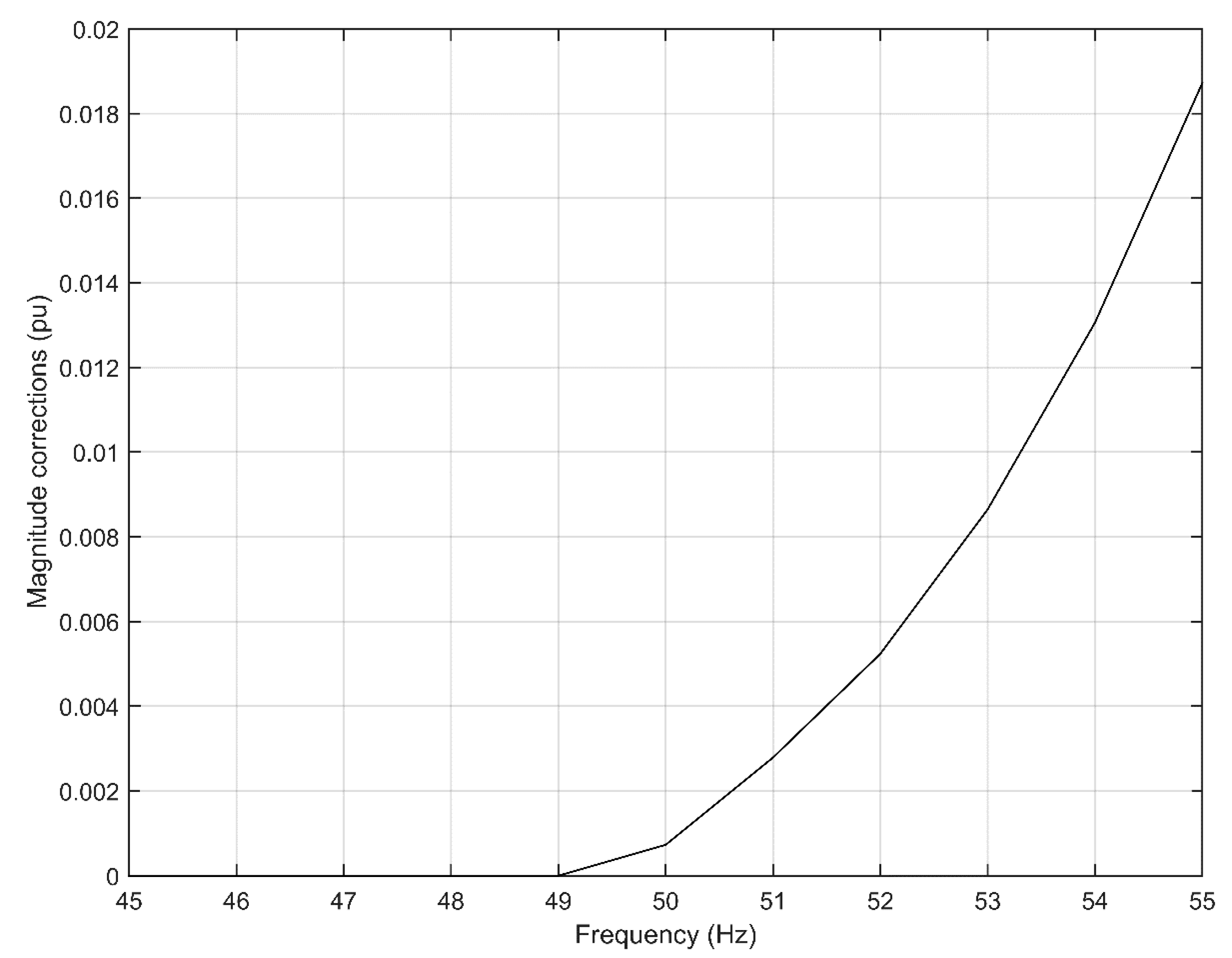
2.5. Corrections of the Synchrophasor Magnitude and Phase Estimation
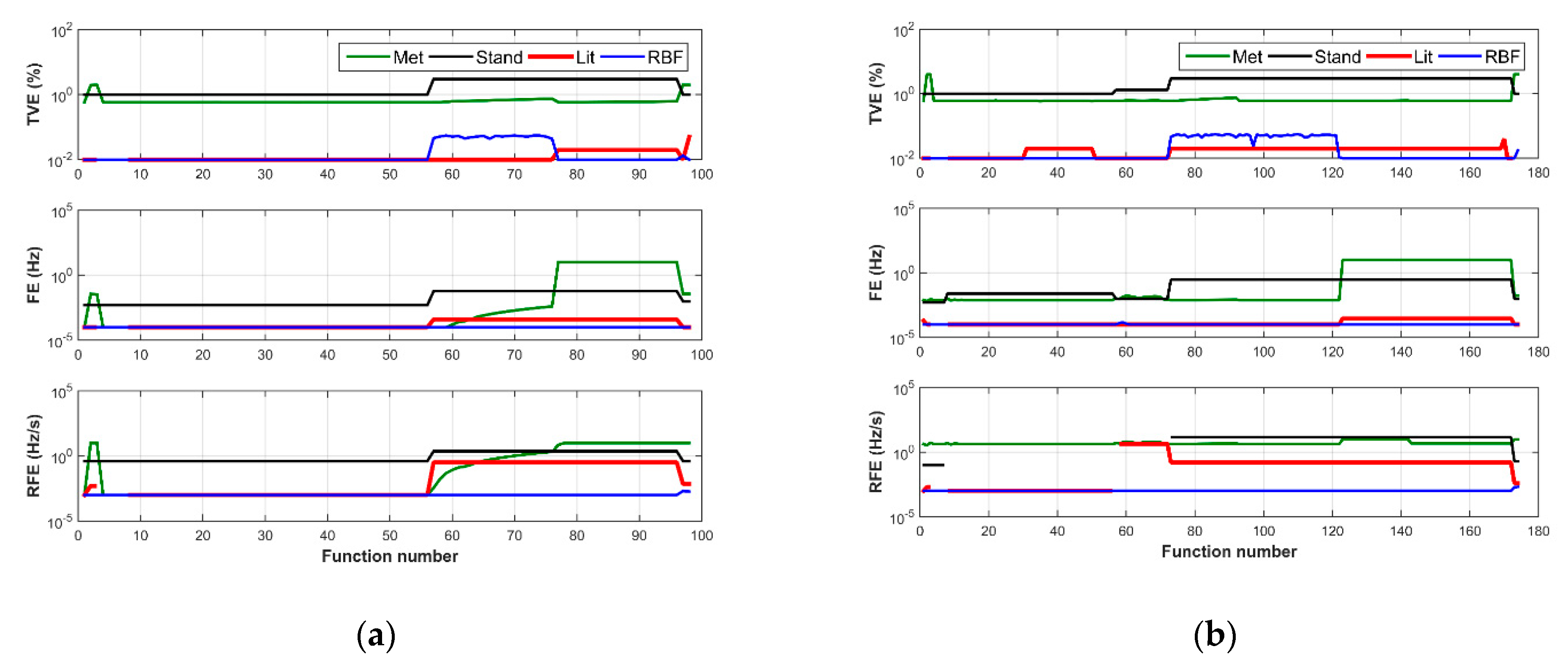
3. Results and Discussion
4. Conclusions
- The idea of using two algorithms operating simultaneously to estimate the synchrophasor magnitude, phase and frequency that applied identical calculation methods; the main difference between them was that the first one filtered the input signal using the FIR filter, while the second one operated without any filter;
- The method of the synchrophasor magnitude estimation by means of a suitably trained and applied RBF;
- The algorithm calculating corrections of the phase shift between the input and output signal;
- The algorithm calculating corrections of the magnitude estimation;
- The algorithm of phase estimation using the phase from the previous measurement window and the frequency value from a given window.
Author Contributions
Funding
Conflicts of Interest
References
- Machowski, J. Wide-area measurement system applied to emergency control of power system Part I Synchronous phasor measurement. Autom. Elektroenerg. 2005, 2, 26–34. [Google Scholar]
- IEEE Standard for Synchrophasor Measurements for Power Systems. In IEEE Std C37.118.1-2011 (Revision of IEEE Std C37.118TM-2005); IEEE: Piscataway, NJ, USA, 2011; pp. 1–61. [CrossRef]
- IEEE. IEEE Standard for Synchrophasors for Power Systems Measurements for Power Systems–Amendment 1: Modification of Selected Performance Requirements. In IEEE Std C37.118.1a–2014 (Amendment to IEEE Std C37.118.1-2011); IEEE: Piscataway, NJ, USA, 2014; pp. 1–25. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. IEC/IEEE Standard 60255-118-1:2018 Part 118-1: Synchrophasor Measurements for Power Systems; IEEE STD23444; International Electrotechnical Commission: Geneva, Switzerland, 2018; pp. 1–78. ISBN 978-1-5044-5361-5. [Google Scholar] [CrossRef]
- Phadke, A.G.; Thorp, J.S. Synchronized Phasor Measurements and Their Applications; Springer: New York, NY, USA, 2008; pp. 5–195. [Google Scholar]
- Femine, A.D.; Gallo, D.; Landi, C.; Luiso, M. The Design of a Low Cost Phasor Measurement Unit. Energies 2019, 12, 2648. [Google Scholar] [CrossRef]
- Li, J.; Wei, W.; Zhang, S.; Li, G.; Gu, C. Conditional Maximum Likelihood of Three-Phase Phasor Estimation for µPMU in active Distribution Networks. Energies 2018, 11, 1320. [Google Scholar] [CrossRef]
- Kang, S.-H.; Seo, W.-S.; Nam, S.-R. A Frequency Estimation Method Based on a Revised 3-Level Discrete Fourier Transform with an Estimation Delay Reduction Technique. Energies 2020, 13, 2256. [Google Scholar] [CrossRef]
- Kušljević, M.D.; Tomić, J.J.; Poljak, P.D. On Multiple-Resonator-based Implementation of IEC/IEEE Standard P-Class Compliant PMUs. Energies 2021, 14, 198. [Google Scholar] [CrossRef]
- Xue, H.; Cheng, Y.; Ruan, M. Enhanced Flat Window-Based Synchrophasor Measurement Algorithm for P Class PMUs. Energies 2019, 12, 4039. [Google Scholar] [CrossRef]
- Rebizant, W.; Szafran, J. Power system frequency estimation. IET Gener. Transm. Dis. 1998, 145, 578–582. [Google Scholar] [CrossRef]
- Szafran, J.; Wiszniewski, A. Measurement and Decision Algorithms of Digital Protection and Control; WNT: Warszawa, Poland, 2001. (In Polish) [Google Scholar]
- Thilakarathne, C.; Meegahapola, L.; Fernando, N. Static Performance Comparison of Prominent Synchrophasor Algorithms. In Proceedings of the 2017 IEEE Innovative Smart Grid Technologies-Asia, Auckland, New Zealand, 4–7 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Thilakarathne, C.; Meegahapola, L.; Fernando, N. Improved Synchrophasor Models for Power System Dynamic Stability Evaluation Based on IEEE C37.118.1 Reference Architecture. IEEE Trans. Instrum. Meas. 2017, 66, 2937–2947. [Google Scholar] [CrossRef]
- Roscoe, A.J.; Abdulhadi, I.F.; Burt, G.M. P–Class Phasor Measurement Unit Algorithms Using Adaptive Filtering to Enhance Accuracy at Off-Nominal Frequencies. In Proceedings of the 2011 IEEE International Conference on Smart Measurements of Future Grids, Bologna, Italy, 14–16 November 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Roscoe, A.J.; Abdulhadi, I.F.; Burt, G.M. P and M Class Phasor Measurement Unit Algorithms Using Adaptive Cascaded Filters. IEEE Trans. Power Deliv. 2013, 28, 1447–1459. [Google Scholar] [CrossRef]
- Roscoe, A.J. Exploring the Relative Performance of Frequency-Tracking and Fixed-Filter Phasor Measurement Unit Algorithms Under C37.118 Test Procedures, the Effects of Interharmonics, and Initial Attempts at Merging P-Class Response With M-Class Filtering. IEEE Trans. Instrum. Meas. 2013, 62, 2140–2153. [Google Scholar] [CrossRef]
- Hsieh, G.; Hung, J.C. Phase-locked loop techniques. A survey. IEEE Trans. Ind. Electron. 1996, 43, 609–615. [Google Scholar] [CrossRef]
- Dash, P.K.; Jena, R.K.; Panda, G.; Routray, A. An extended complex Kalman filter for frequency measurement of distorted signals. IEEE Trans. Instrum. Meas. 2000, 49, 746–753. [Google Scholar] [CrossRef]
- Girgis, A. A new Kalman filtering based digital distance relay. IEEE Power Eng. Rev. 1982, PAS-101, 3471–3480. [Google Scholar]
- De Apráiz, M.; Diego, R.I.; Barros, J. An Extended Kalman Filter Approach for Accurate Instantaneous Dynamic Phasor Estimation. Energies 2018, 11, 2918. [Google Scholar] [CrossRef]
- Kamwa, I.; Samantaray, S.R.; Joos, G. Compliance Analysis of PMU Algorithms and Devices for Wide-Area Stabilizing Control of Large Power Systems. IEEE Trans. Power Syst. 2013, 28, 1766–1778. [Google Scholar] [CrossRef]
- Kamwa, I.; Samantaray, S.R.; Joos, G. Wide Frequency Range Adaptive Phasor and Frequency PMU Algorithms. IEEE Trans. Smart Grid 2014, 5, 569–579. [Google Scholar] [CrossRef]
- Ren, J.; Kezunovic, M. Real-Time Power System Frequency and Phasors Estimation Using Recursive Wavelet Transform. IEEE Trans. Power Deliv. 2011, 26, 1392–1402. [Google Scholar] [CrossRef]
- De la Serna, J.A. Synchrophasor Estimation Using Prony’s Method. IEEE Trans. Instrum. Meas. 2013, 62, 2119–2128. [Google Scholar] [CrossRef]
- Kasztenny, B.; Premerlanit, W.; Adamiak, M. Synchrophasor Algorithm Allowing Seamless Integration with Today’s Relays. In Proceedings of the 2008 IET 9th International Conference on Developments in Power System Protection, Glasgow, UK, 17–20 March 2008; pp. 724–729. [Google Scholar] [CrossRef]
- Premerlani, W.; Kasztenny, B.; Adamiak, M. Development and Implementation of a Synchrophasor Estimator Capable of Measurements under Dynamic Conditions. IEEE Trans. Power Deliv. 2008, 23, 109–123. [Google Scholar] [CrossRef]
- Sykes, J.; Koellner, K.; Premerlani, W.; Kasztenny, B.; Adamiak, M. Synchrophasors: A Primer and Practical Applications. In Proceedings of the 2007 Power Systems Conference: Advanced Metering, Protection, Control, Communication and Distributed Resources, Clemson, SC, USA, 13–16 March 2007; pp. 1–26. [Google Scholar] [CrossRef]
- Tanvir, A.A.; Merabet, A. Artificial Neural Network and Kalman Filter for Estimation and Control in Standalone Induction Generator Wind Energy DC Microgrid. Energies 2020, 13, 1743. [Google Scholar] [CrossRef]
- Cichocki, A.; Łobos, T. Adaptive analogue network for real-time estimation of basic waveforms of voltages and currents. IEEE Proc. C 1992, 139, 343–350. [Google Scholar] [CrossRef]
- Osowski, S. Neural network for estimation of harmonic components in a power system. IEEE Proc. C 1992, 139, 129–135. [Google Scholar] [CrossRef]
- Chen, C.-I.; Chen, Y.-C.; Chin, Y.-C.; Wang, H.-L. Design of Neural Network-Based Phasor Measurement Unit for Monitoring of Power System. In Proceedings of the 2014 IEEE International Conference on Granular Computing, Noboribetsu, Hokkaido, Japan, 22–24 October 2014; pp. 45–48. [Google Scholar] [CrossRef]
- Innah, H.; Hiyama, T. Neural Network Method Based on PMU data for Voltage Stability Assessment and Visualization. In Proceedings of the TENCON 2011–2011 IEEE Region 10 Conference, Bali, Indonesia, 21–24 November 2011; pp. 822–827. [Google Scholar] [CrossRef]
- Ivanov, O.; Gavrilaş, M. State Estimation with Neural Networks and PMU Voltage Measurements. In Proceedings of the 2014 International Conference and Exposition on Electrical and Power Engineering, Iasi, Romania, 16–18 October 2014; pp. 983–988. [Google Scholar] [CrossRef]
- Kamwa, I.; Grondin, R.; Sood, V.K.; Gagnon, C.; Nguyen, V.T.; Mereb, J. Recurrent Neural Networks for Phasor Detection and Adaptive Identification in Power System Control and Protection. IEEE Trans. Instrum. Meas. 1996, 45, 657–664. [Google Scholar] [CrossRef]
- Binek, M.; Kanicki, A.; Korbel, P. Signal Parameters Identification Methods Used in Wide-Area Measurement Systems. In Proceedings of the 2016 Electrical Power Networks Conference–EPNet, Szklarska Poreba, Poland, 19–21 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Mohagheghi, S.; Venayagamoorthy, G.; Harley, R. Optimal wide area controller and state predictor for a power system. IEEE Trans. Power Syst. 2007, 22, 693–705. [Google Scholar] [CrossRef]
- Gong, J.; Yang, W. Driver Pre-accident Behaviour Pattern Recognition Based on Dynamic Radial Basis Function Neural Network. In Proceedings of the 2011 International Conference on Transportation, Mechanical and Electrical Engineering, Changchun, China, 16–18 December 2011; pp. 328–331. [Google Scholar] [CrossRef]
- Castello, P.; Liu, J.; Muscas, C.; Pegoraro, P.A.; Ponci, F.; Monti, A. A Fast and Accurate PMU Algorithm for P+M Class Measurement of Synchrophasor and Frequency. IEEE Trans. Instrum. Meas. 2014, 63, 2837–2845. [Google Scholar] [CrossRef]
- Castello, P.; Muscas, C.; Pegoraro, P.A.; Sulis, S.; Toscani, S. Experimental Characterization of Dynamic Methods for Synchrophasor Measurements. In Proceedings of the 2014th IEEE International Workshop on Applied Measurements for Power Systems Proceedings, Aachen, Germany, 24–26 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Toscani, S.; Muscas, C. A Space Vector Based Approach for Synchrophasor Measurement. In Proceedings of the 2014 IEEE International Instrumentation and Measurement Technology Conference, Montevideo, Uruguay, 12–14 May 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Hareesh, S.V.; Raja, P.; Selvan, M.P. An Effective Implementation of Phasor Measurement Unit (PMU) by using Non-Recursive DFT Algorithm. In Proceedings of the 2015 International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), Bangalore, India, 10–12 December 2015; pp. 195–199. [Google Scholar] [CrossRef]
- De la O Serna, J.A.; Paternina, M.R.A.; Zamora-Mendez, A. Assessing Synchrophasor Estimates of an Event Captured by a Phasor Measurement Unit. IEEE Trans. Power Deliv. (Early Access) 2020, 1–9. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P Class | M Class | ||||||
|---|---|---|---|---|---|---|---|
| Function Number | TVE | FE | RFE | Function Number | TVE | FE | RFE |
| % | Hz | Hz/s | % | Hz | Hz/s | ||
| 1 | 1 | 0.005 | 0.4 | 1 | 1 | 0.005 | 0.1 |
| 2, 3 | 1 | 0.005 | 0.4 | 2, 3 | 1 | 0.005 | 0.1 |
| 4 ÷ 7 | 1 | 0.005 | 0.4 | 4 ÷ 7 | 1 | 0.005 | 0.1 |
| 8 ÷ 56 | 1 | 0.005 | 0.4 | 8 ÷ 56 | 1 | 0.025 | - |
| - | - | - | - | 57 ÷ 72 | 1.3 | 0.01 | - |
| 57 ÷ 76 | 3 | 0.06 | 2.3 | 73 ÷ 122 | 3 | 0.3 | 14 |
| 77 ÷ 96 | 3 | 0.06 | 2.3 | 123 ÷ 172 | 3 | 0.3 | 14 |
| 97, 98 | 1 | 0.01 | 0.4 | 173, 174 | 1 | 0.01 | 0.2 |
| Step Functions—Response Times | |||||||
| Function Number | RT-TVE | RT-FE | RT-RFE | Function Number | RT-TVE | RT-FE | RT-RFE |
| S | S | s | s | s | s | ||
| 99÷102 | 0.04 | 0.09 | 0.12 | 175 ÷ 178 | 0.14 | 0.28 | 0.28 |
| 103÷106 | 0.04 | 0.09 | 0.12 | 179 ÷ 182 | 0.14 | 0.28 | 0.28 |
| Step Functions—Delay Time and Overshoot/Undershoot Value | |||||||
| Function Number | DT | OV | - | Function Number | DT | OV | - |
| S | % | - | s | % | - | ||
| 99 ÷ 102 | 0.005 | 5 | - | 175 ÷ 178 | 0.005 | 10 | - |
| 103 ÷ 106 | 0.005 | 5 | - | 179 ÷ 182 | 0.005 | 10 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Binek, M.; Kanicki, A.; Rozga, P. Application of an Artificial Neural Network for Measurements of Synchrophasor Indicators in the Power System. Energies 2021, 14, 2570. https://doi.org/10.3390/en14092570
Binek M, Kanicki A, Rozga P. Application of an Artificial Neural Network for Measurements of Synchrophasor Indicators in the Power System. Energies. 2021; 14(9):2570. https://doi.org/10.3390/en14092570
Chicago/Turabian StyleBinek, Malgorzata, Andrzej Kanicki, and Pawel Rozga. 2021. "Application of an Artificial Neural Network for Measurements of Synchrophasor Indicators in the Power System" Energies 14, no. 9: 2570. https://doi.org/10.3390/en14092570
APA StyleBinek, M., Kanicki, A., & Rozga, P. (2021). Application of an Artificial Neural Network for Measurements of Synchrophasor Indicators in the Power System. Energies, 14(9), 2570. https://doi.org/10.3390/en14092570