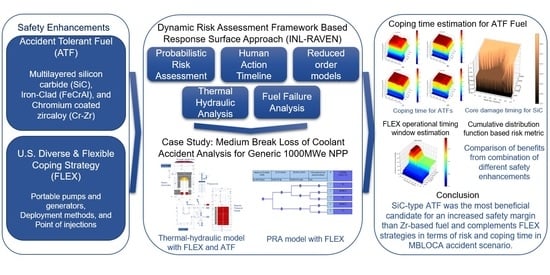
Although the research has shown that the ATF is more oxidation-resistant as compare to the conventional zircaloy-based fuel, one needs to model the behavior of the ATF properly, integrate this model into the nuclear power plant model and capture the effect of uncertainties to analyze the benefit of the ATF in the different accident scenarios. On the other side, FLEX strategies were developed to provide additional coping capabilities to prevent the core damage in extreme accident conditions. Since these two features are going to be implemented in the near future, the presented methodology was developed with an aim:
Since the accident evolves on the system response to the initial perturbation and their interaction with the system in a dynamic manner, the framework introduced in previous work [
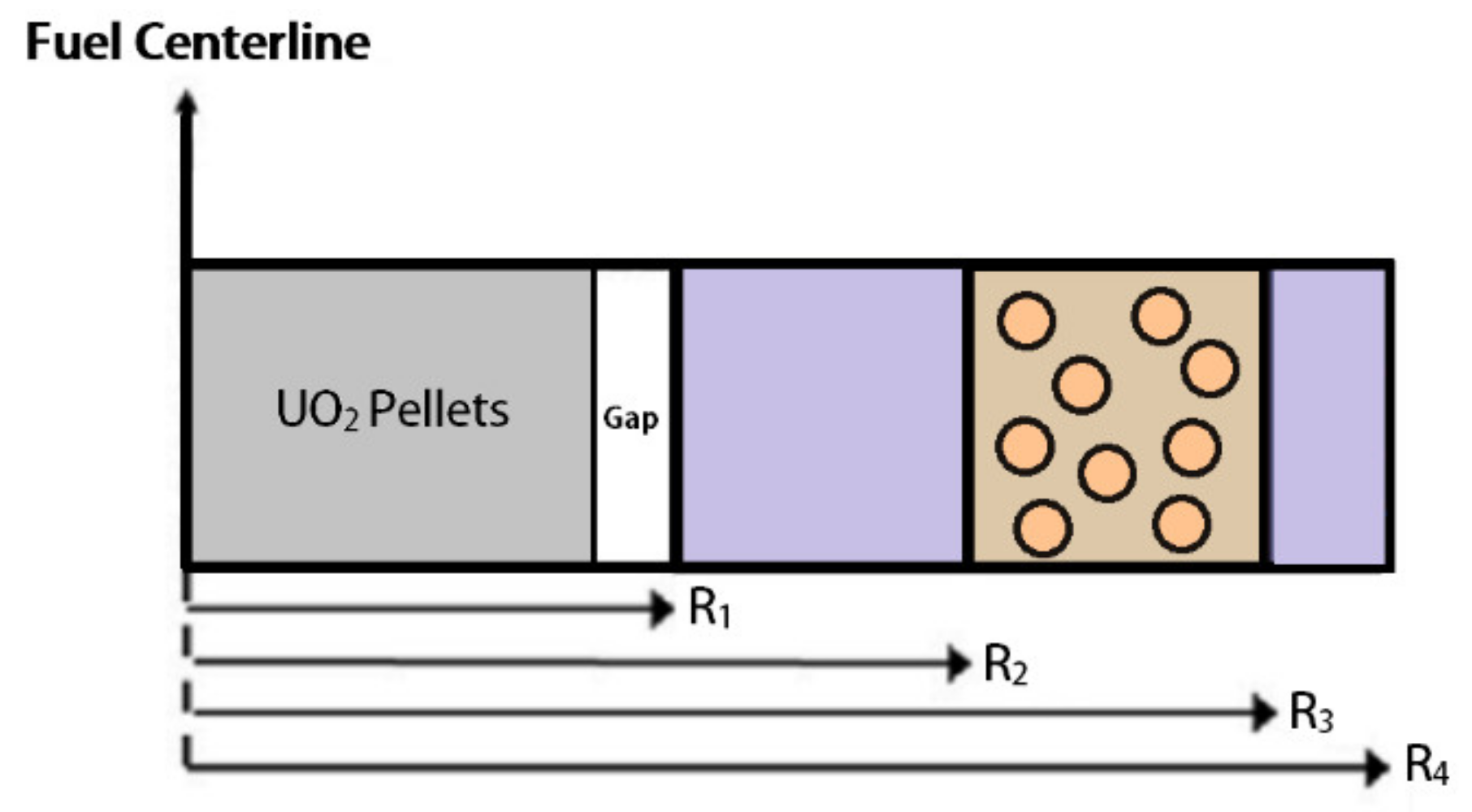
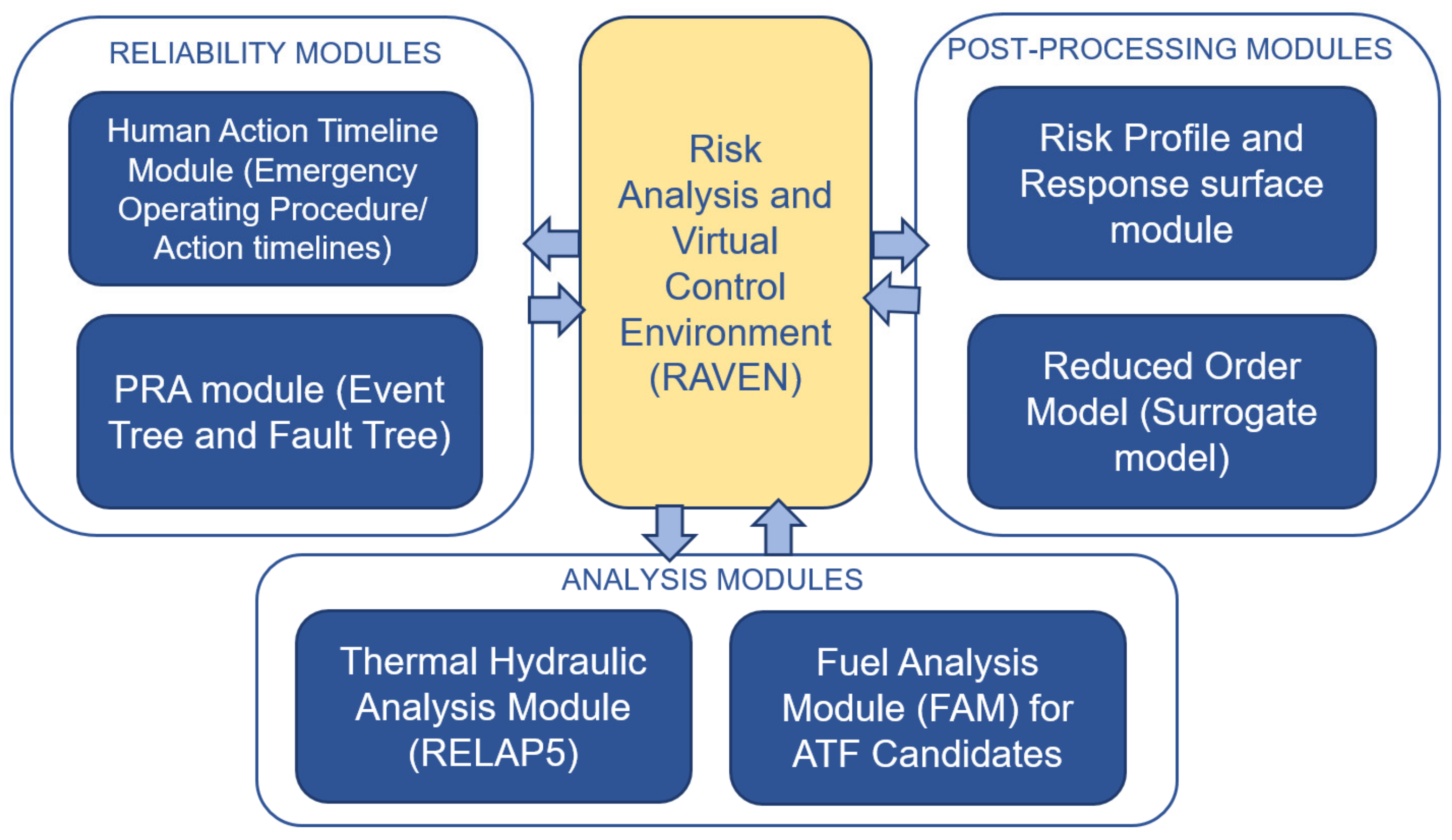
17] is extended to study the effects of additional ATF candidates and FLEX. Additional ATF fuel failure analysis modules (FAMs) and risk profile and response surface modules were integrated to systematically perform a dynamic risk assessment, as shown in
Figure 2. The failure data of the portable equipment and human reliability calculations for the FLEX strategy were implemented in the reliability module. At the same time, the thermal-hydraulic model of FLEX was added to the thermal-hydraulic analysis module. A provision was made to quantify the CDF-based importance measure of each new safety feature to evaluate their benefit over the accident trajectory. There are three main parts of this framework; reliability modules, analysis modules, and post-processing modules. These modules are connected to a control module that is based on the Risk Analysis and Virtual Control Environment (RAVEN), which was developed at the Idaho National Laboratory (INL) [
27,
28]. The functions of each module are described in the following sections.
3.1. Reliability Modules
As shown in
Figure 2, there are two modules inside the reliability module block. The first module is the human action timeline module; this module provides the timeline distributions of the operator’s actions to the RAVEN control block. The human action timeline module block’s primary function is to provide the operator’s timeline information data obtained under simulated emergencies. This module contains the operator performance and reliability analysis (OPERA) database [
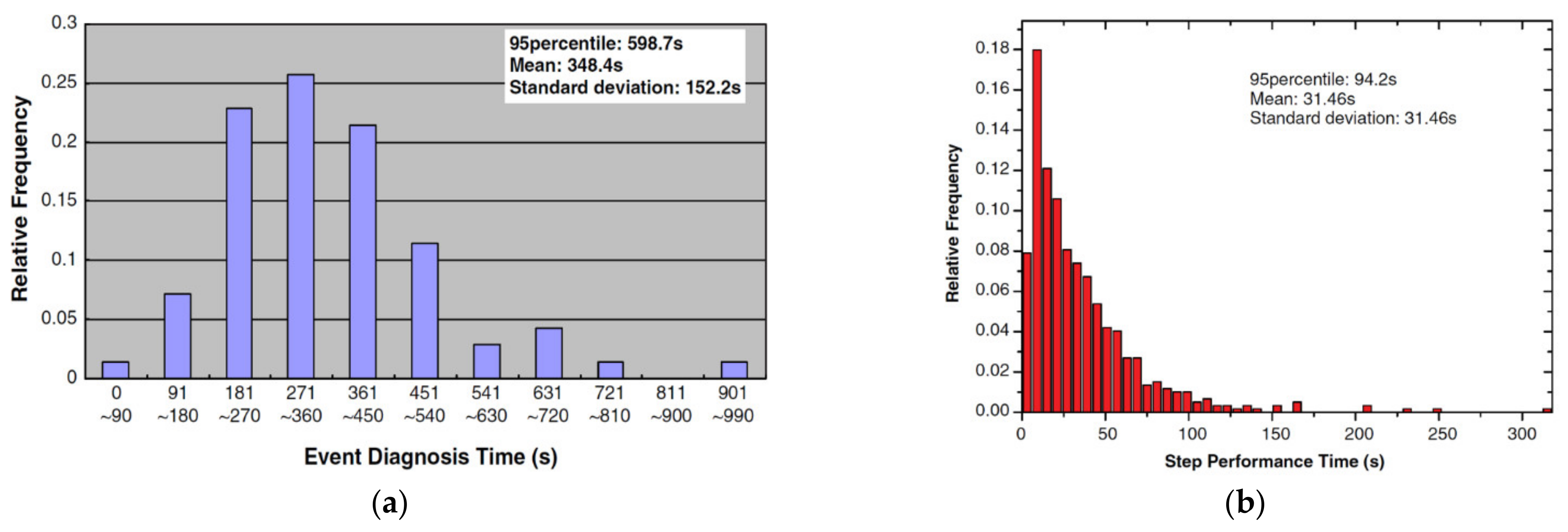
29] and the information from EOPs. One of the most critical tasks during an accident scenario is the diagnosis of which event has occurred. The OPERA database established the timeline information (i.e., the total time for standard post-trip actions and the diagnosis time) from the reactor trip to completing the diagnosis procedure.
Moreover, OPERA also contains the step performance time data within the tasks.
Figure 3a,b depicts the timings distribution of the event diagnosis procedure and step performance time for different accident scenarios, respectively. Normal distribution and exponential distribution were fitted to the event diagnosis time and step performance time to calculate the most probable timings, respectively. The mean and standard deviation of the distribution were reported in the OPERA database. These distributions were utilized with the assumption that the number of steps is independent of each other. In that case, each task can be combined to give a gamma distribution [
30].
This block also contains the human reliability data for the FLEX deployment collected from previous research [
13,
14,
15,
18]. Detailed modeling of FLEX portable equipment is discussed in
Section 3.2. The human action timeline module provides the operator action timeline to recover the failed safety system such as the ECCS and auxiliary feedwater recovery if automatic actuation signal fails to generate and deploy and operate the FLEX portable equipment. Since the FLEX strategies are relatively new, there has not been extensive research supported by the infield experiments. Previous studies [
18] suggested three deployment methods for the FLEX portable equipment. First includes only the pre-staging of the portable equipment that requires the directions to the responsible personnel to move to the area and initiate the FLEX portable equipment. The equipment was already deployed to the site location. The second includes the deployment by the initial emergency response team in addition to the first strategy, so it takes more time for FLEX initiation. Third, the FLEX equipment deployment by the offsite emergency response team requires additional time to send a notification to the offsite emergency response team with appropriate directions. This option may require more time than the first two deployment methods. The minimum time delay of 2 h was estimated for the SBO, including the time for DC load shedding in the reference study [
18]. In another study [
13], the total loss of feedwater accident scenario was analyzed with the FLEX strategy by considering the minimum time delay of 45 min. Since the MBLOCA is a fast propagating scenario, we select the delay of 45 min in the case of LOCA accidents with a log-normal distribution.
The second module in this block is the probabilistic risk assessment (PRA) module. It contains the complete PRA model for a generic 1000 MWe pressurized water reactor (PWR)-based NPP. One of this module’s primary functions is to provide the sequence of the event in combination with the human action timeline module block as it also contains the timeline information of the operating procedure during an emergency. The sequence information is provided from the accident event trees (ET), and the component reliability information is provided from the fault tree (FT) models that correspond to the headers in the ET. This module’s two primary inputs to the RAVEN control block are the accident sequence information and the component failure data. This failure data may include the components that fail to start/operate either due to the failure of automatic actuation signal generation or the mechanical failure and their running failures over the accident trajectory.
The FT model for FLEX was also developed and incorporated into the PRA model for generic 1000 NPP (PRA module). Since the purpose of the PRA module is to provide the failure distributions to the RAVEN control module, only the failure distributions of the equipment will be relevant, and details for the FT development are not included in this study.
3.2. Analysis Modules
This block consists of two modules. One is the thermal-hydraulic analysis module, and the other is the fuel failure analysis module (FAM). The FAM’s purpose is to model the ATF mechanical failures that cannot be implemented in thermal-hydraulic code such as RELAP5 [
31]. The Thermal hydraulic module contains the two-loop RELAP5 thermal-hydraulic model for generic 1000 MWe NPP adapted from previous research [
32,
33]. Since this study aims to analyze the benefit of FLEX with different ATF fuel types, provisions of these features were made in the input model. As discussed in
Section 2, thermal properties were specified in the input model according to the type of ATF analyzed.
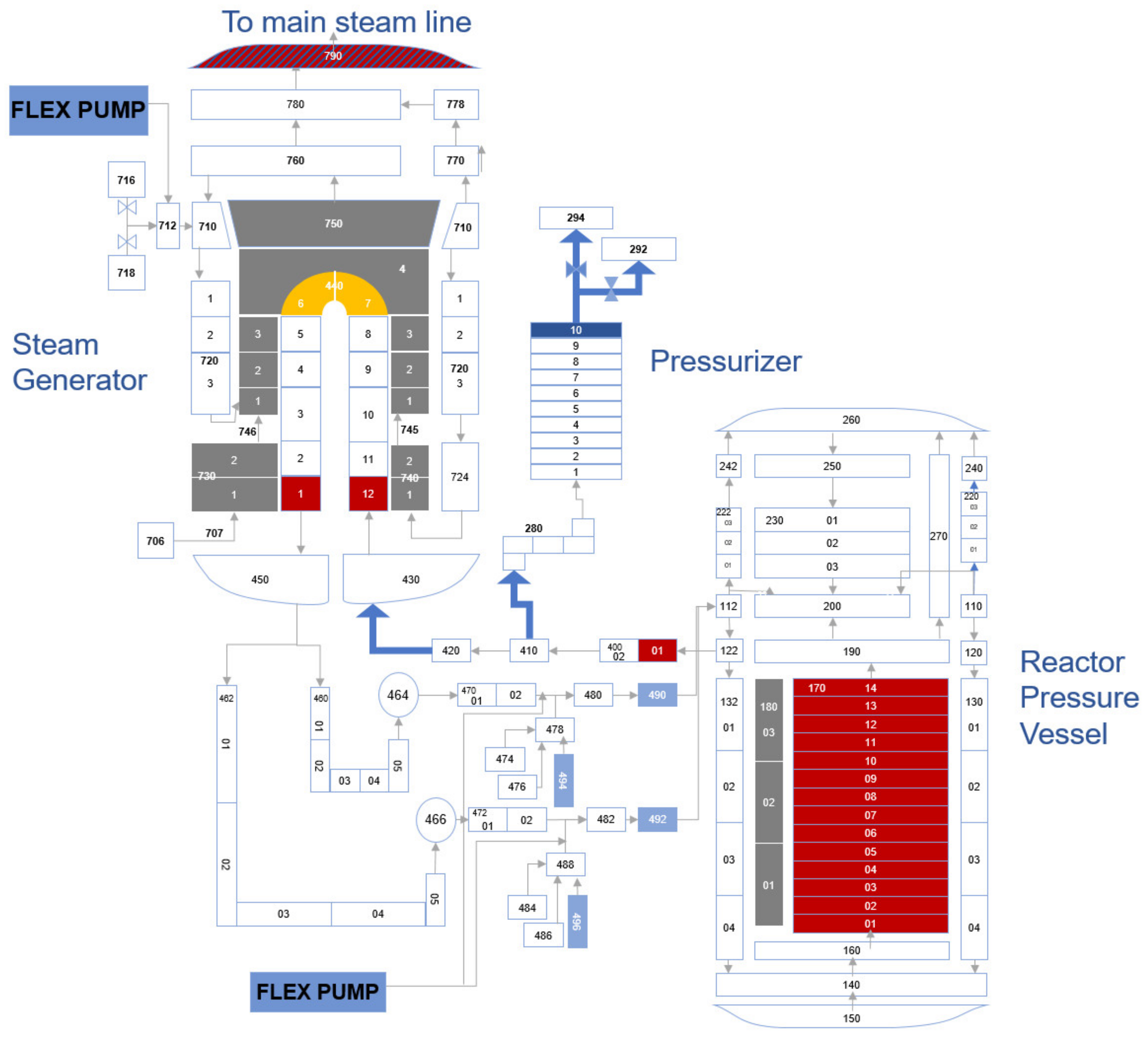
Figure 4. shows only one loop with a pressurizer for the two-loop generic 1000 MWe PWR-based NPP. The target model is a two-loop NPP with two cold-legs with reactor coolant pumps, one hot-leg, and a steam generator at each loop. There is only one pressurizer at the hot-leg as shown in
Figure 4. Since the second loop was identical, we show FLEX injection points in only one loop of the RELAP5 input model. Two FLEX pumps, BA150H and HH125 [
13] were modeled with their performance curves obtained from the manufacturer manuals. These provisions were made in the input so that these pumps can inject coolant directly into the primary side via the safety injection piping and into the secondary side via the auxiliary feedwater injection piping. Since the depressurization is self-sufficient in most of the cases of MBLOCA, we will focus on the FLEX strategy with direct injection into the primary side by the local emergency response team using the pre-deployment method as discussed in
Section 3.1. However, the depressurization via pressurizer relief valve was considered for the cases with smaller break sizes (<3.5 inches).
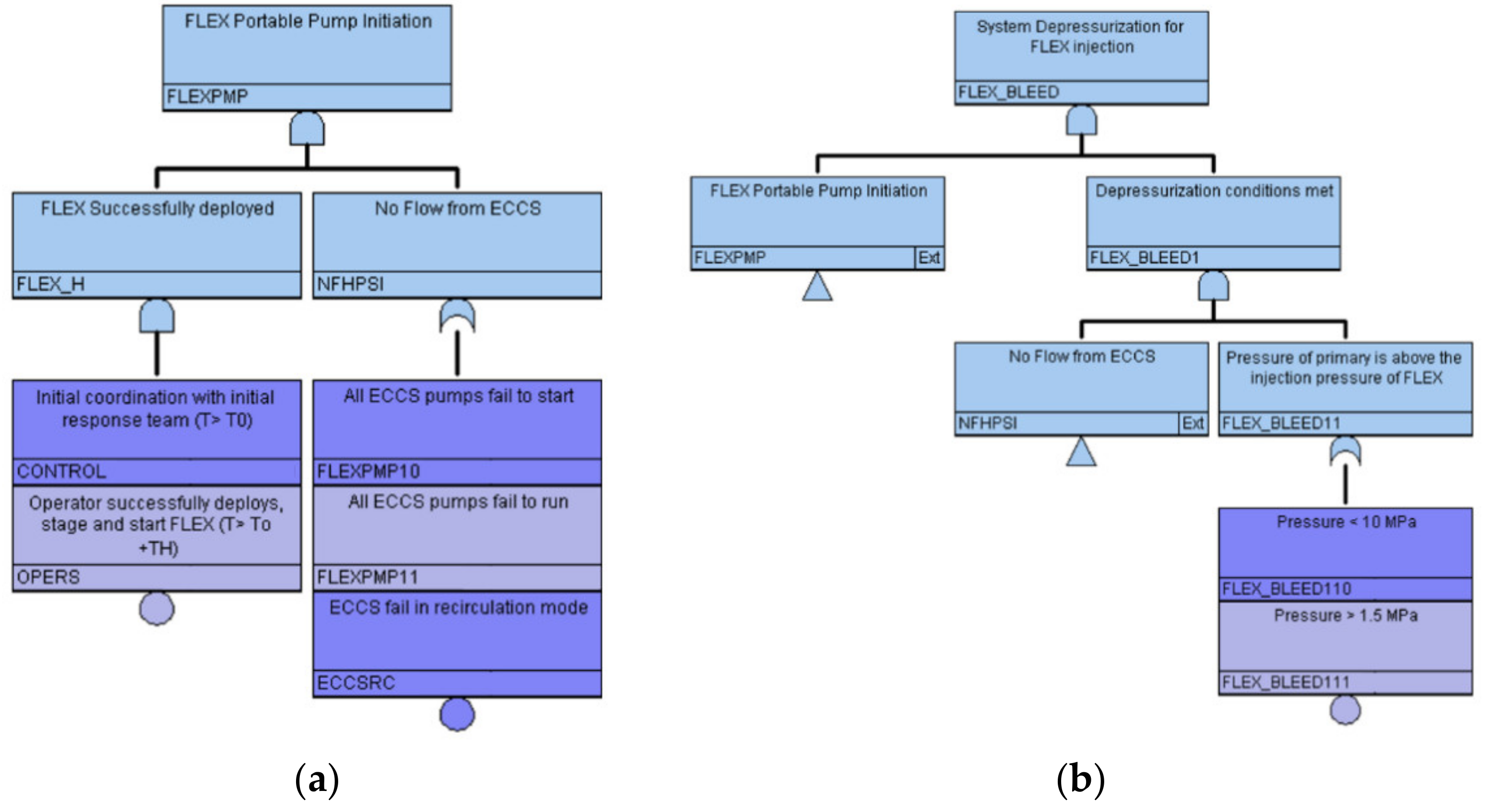
Since there has not been sufficient research that can provide the logic for performing the depressurization to inject FLEX, the actuation logic for FLEX was modeled for low-pressure accidents.
Figure 5a shows the trip logic for the FLEX deployment to the primary side in the RELAP5 input model. The FLEX pump injection was considered successful if it meets the minimum time of initial coordination with the onsite deployment team and the operator’s success of starting and staging the portable generator and pumps. However, the timings of operation may lead to the success and failure of the FLEX functions. This will be discussed in detail in
Section 4.4 and
Section 4.5.
Figure 5b shows the logic for the primary depressurization for FLEX injection. The operator will start depressurization once he/she identifies that FLEX equipment has been deployed and ECCS fails to inject the coolant into the primary loop after the generation of the ECCS actuation signal or the conditions such as low pressurizer pressure.
Since RELAP5 is a thermal-hydraulic code, it has a limitation to model the stochastic and mechanical failures such as failures due to overstress. Therefore, separate modules were developed to model the mechanical failure of ATF candidates. The modeling details are provided in
Section 2. Therefore, once the thermal-hydraulic simulations are completed for each fuel type, results are then transferred to the RAVEN control block. RAVEN executes the FAM simulation on each output to analyze the mechanical failure in each ATF fuel type. Two FAMs were developed to model the mechanical failure for SiC and FeCrAl. Due to the very fine layer for chromium-coated zircaloy, the failure criteria were modeled in the thermal-hydraulic input. RAVEN executes the FAM on each thermal-hydraulic scenario’s output, compiles the results, and sends it to the post-processing module block.
3.3. RAVEN Control Module
RAVEN is a tool developed at the INL acting as a control logic driver for the interacting modules, that is, reliability, analysis, and post-processing modules. The RAVEN can systematically interact with these modules with an input defined in XML [
34] format. Sub-input text files for the thermal-hydraulic module and FAM need to be defined within the XML input. To determine the RAVEN XML input, information from the reliability module is fetched first to generate the accident sequence based on the event tree’s headers and the human action timeline from the emergency operating procedures. The headers in the ET correspond to the FT that defines the branching conditions for the accident scenarios. For this paper, we focus our study on MBLOCA accident scenarios so that these conditions may include the following:
Pump fails to start (for example, ECCS pumps)
Pump fails to run (running failures over the accident simulation time)
Automatic actuation signal fails to generate (for example, ECCS auto actuation)
Recovery of the failed system by the operator using human action timeline information.
Human action timeline distribution for the actions such as secondary cooldown and primary depressurization.
Human action timeline distribution for the FLEX deployment and actuation
Other failures (such as recirculation failure due to failure of sump isolation valves).
The uncertainty distribution of the variables corresponding to the systems’ failures and the component, including the human action timeline distribution, were then extracted from the reliability module and provided to the RAVEN control block. It is imperative to make the provision of these variables in the RELAP5 thermal-hydraulic input before execution. It is to be noted that more than one variable from the reliability module can correspond to a single variable in the input of RELAP5. Many sampling techniques are available in the RAVEN platform, including the Monte-Carlo, Grid, Latin-hypercube, dynamic event tree, and hybrid [
28]. Since the focus of this study is to obtain a risk profile response surface that covers the complete spectrum in a three-dimensional space, we selected grid sampling so that the grid size may vary with respect to the sensitivity of the study (e.g., ECCS recovery timing in a LOCA accident is essential in the early stage of transient initiation, so the grid size at the beginning of the transient is narrow and become sparser and sparser at the later stage). The RAVEN generates accident scenarios with the combination of all the variables defined in the grid. The grid size should be selected very carefully as the number of generated accident scenarios depends on the grid’s size and the number of variables with uncertainties. If the grid size resolution is too high, the number of the generated accident scenarios will be too large to handle and lead to data handling and out-of-memory size issues. Therefore, to limit the number of accident scenarios, we selected each variable’s grid size based on the expert opinion (for example, the grid size for ECCS and FLEX injection is narrow at the beginning of the transient and becomes wider as it reaches the end of the simulation). Moreover, the accident scenarios are generated by dividing the event tree sequence into the required number of sub-trees to remove the illogical branches. For example, if the ECCS pumps automatically start successfully and operate without failure, there is no need to recover the ECCS through manual actuation.
This RAVEN module is also linked with an external post-processing module that contains multiple python scripts, and a MATLAB-based reduced-order model (ROM) developed specifically for the dynamic risk assessment framework [
17].
3.4. Post-Processing Modules
As shown in
Figure 2, the post-processing module block contains two sub-modules: risk profile and response surface module and reduced ordered model (ROM). The post-processing module is an external python module to RAVEN that fetches the generated accident scenarios from the RAVEN block, processes them, and generates output to give the risk profile or a response surface. As mentioned earlier, grid sampling was utilized to create the accident scenarios’ branches. In the grid sampling, each branch has its associated probability weight
[
35] where
and n is the simulation index (
n = 1, 2, 3, ….,
N) and
N is the total number of generated accident scenarios. If there are
X variables with uncertainties and each variable has a grid size of
Mx, then
N can be calculated as
. RAVEN calculates the probability weights of variables with uncertainties by calculating the probability (
pvx) from the given distribution of variables for the given grid size and then normalized it. For example, if a variable x is normally distributed and is divided into
M grids, then
pvx is calculated by calculating the CDF value at the specified grids (
v = 1, 2, 3,
…M), the variable probability weights (
ωvx) are then calculated by dividing these probabilities by
. Similarly, probability weights for
X number of variables with uncertainties (
ωv1, ωv2, ωv3, …, ωvX) are calculated. The associated branch probability weight
is calculated by taking the product of all the probability weights (ω
vx) of the variables with uncertainties corresponding to the nth branch
. These branch probability weights are used to calculate the conditional core damage probability (CCDP) given time t of
N number of accident scenarios as provided by Equation (2) [
17].
where
= core damage state for N scenarios,
= probability weight for nth scenario,
= core damage state for nth accident scenario,
= time of accident progression in seconds.
To calculate the CCDP with respect to any given conditions (e.g., the failure probability given the ECCS fails to actuate), this block selects the number
J accident scenario out of
N so that
. Therefore, the weights are normalized using Equation (3) to give new weights
such that
. Equation (4) is then utilized to calculate the conditional probability with the given condition “A” that can be a single condition or multiple conditions (e.g., the failure probability given the automatic actuation ECCS fails and FLEX fails to inject).
where,
J = the number of the scenario corresponding to condition A,
= new probability weight for jth scenario,
= old probability weight for jth scenario,
= core damage state for jth scenario,
A = single or multiple conditions,
t = accident progression time in seconds.
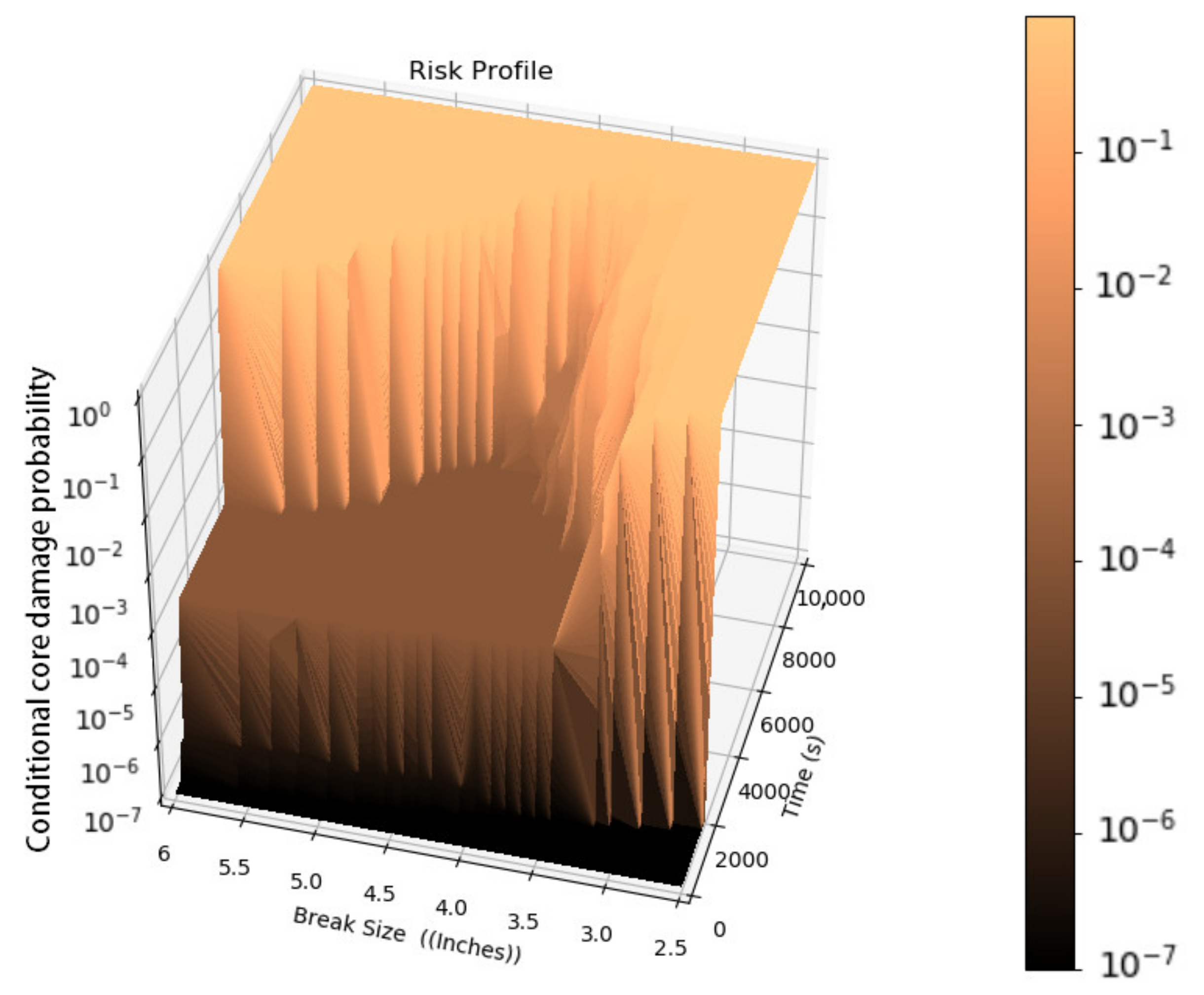
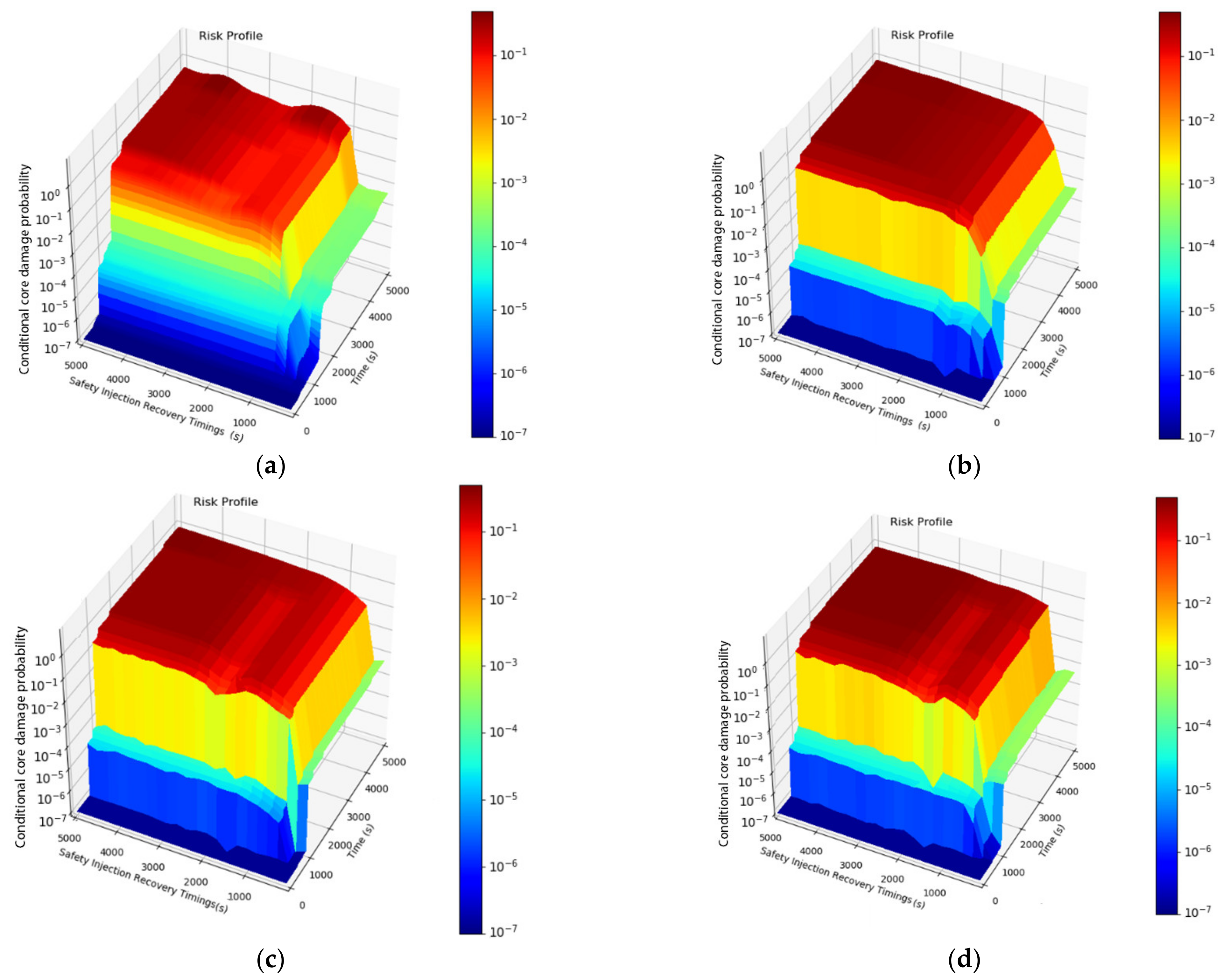
As given in Equation (4), the conditional probability is useful in getting the risk response surface in the three-dimensional space. Let us assume the variable
V has been defined with a grid spacing of
V1,
V2,
V3,
V4 ….
VM, to obtained a response surface for
V, a matrix with width
M and length t will be created using Equations (3) and (4) for the conditional probabilities
P1(
f1|V1,
t),
P2(
f2|V2,
t),
P3(
f3|V3,
t),
P4(
f4|V4,
t) …
PK (
fM|VM,
t). Reduced-order models (ROM) from the authors’ previous work [
17] and pre-established python surrogate modules take this matrix as an input and surrogates it to add enough scenarios to generate the (
M +
G) dimension matrix, which includes the samples (
M) and generated scenarios (G). The post-processing module retrieves this matrix to convert it into a three-dimension response surface.
Since the purpose of this study is to evaluate the benefit of the new safety feature(s) such as ATF and FLEX over the existing capabilities, we leveraged a cumulative distribution function (CDF)-based measure to compare the benefit of each option. Liu et al. [
20] introduced a new CDF importance measure
SiCDF for sensitivity analysis that describes the effect of uncertainty in the model input on the variation in the output CDF.
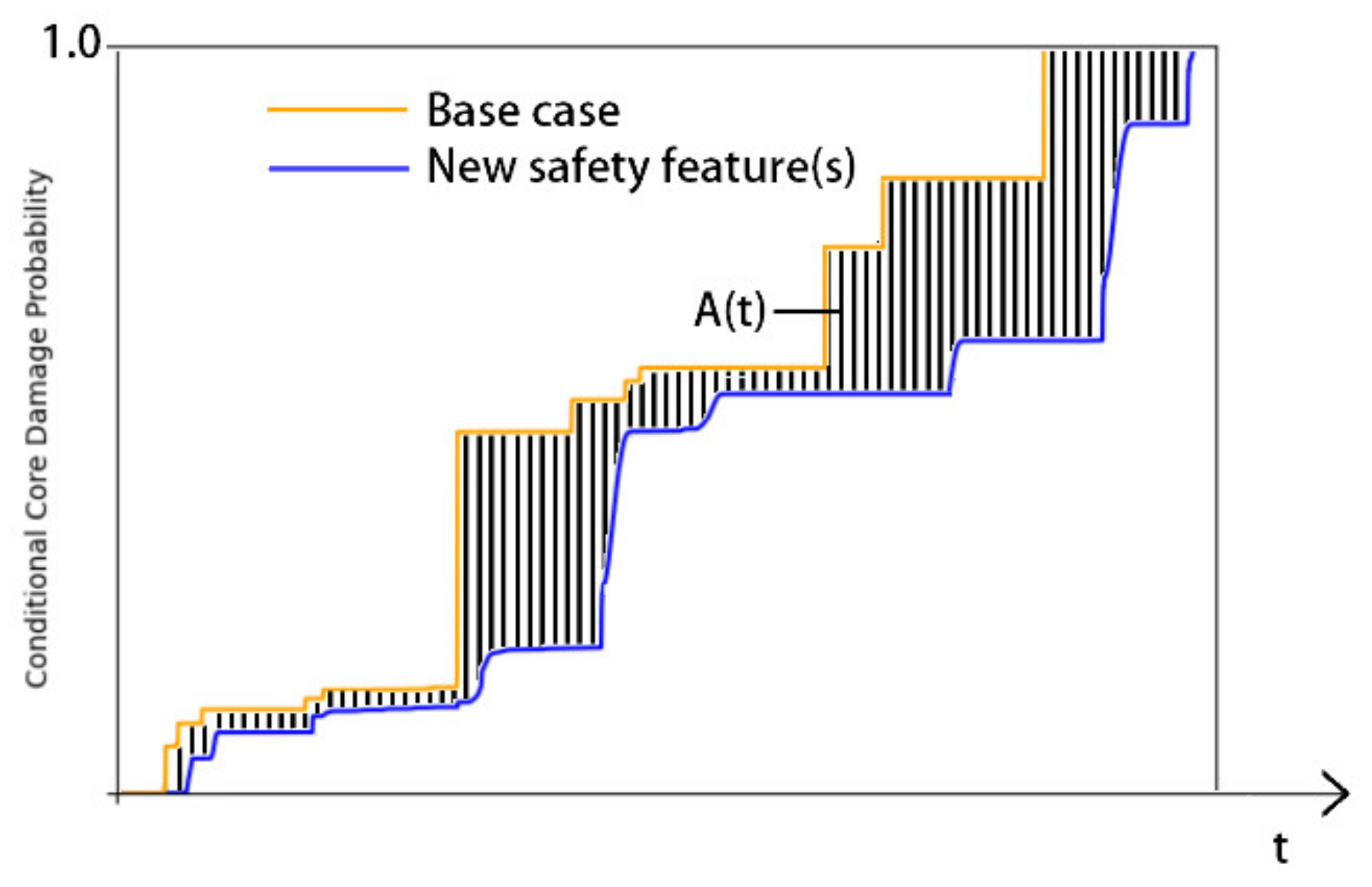
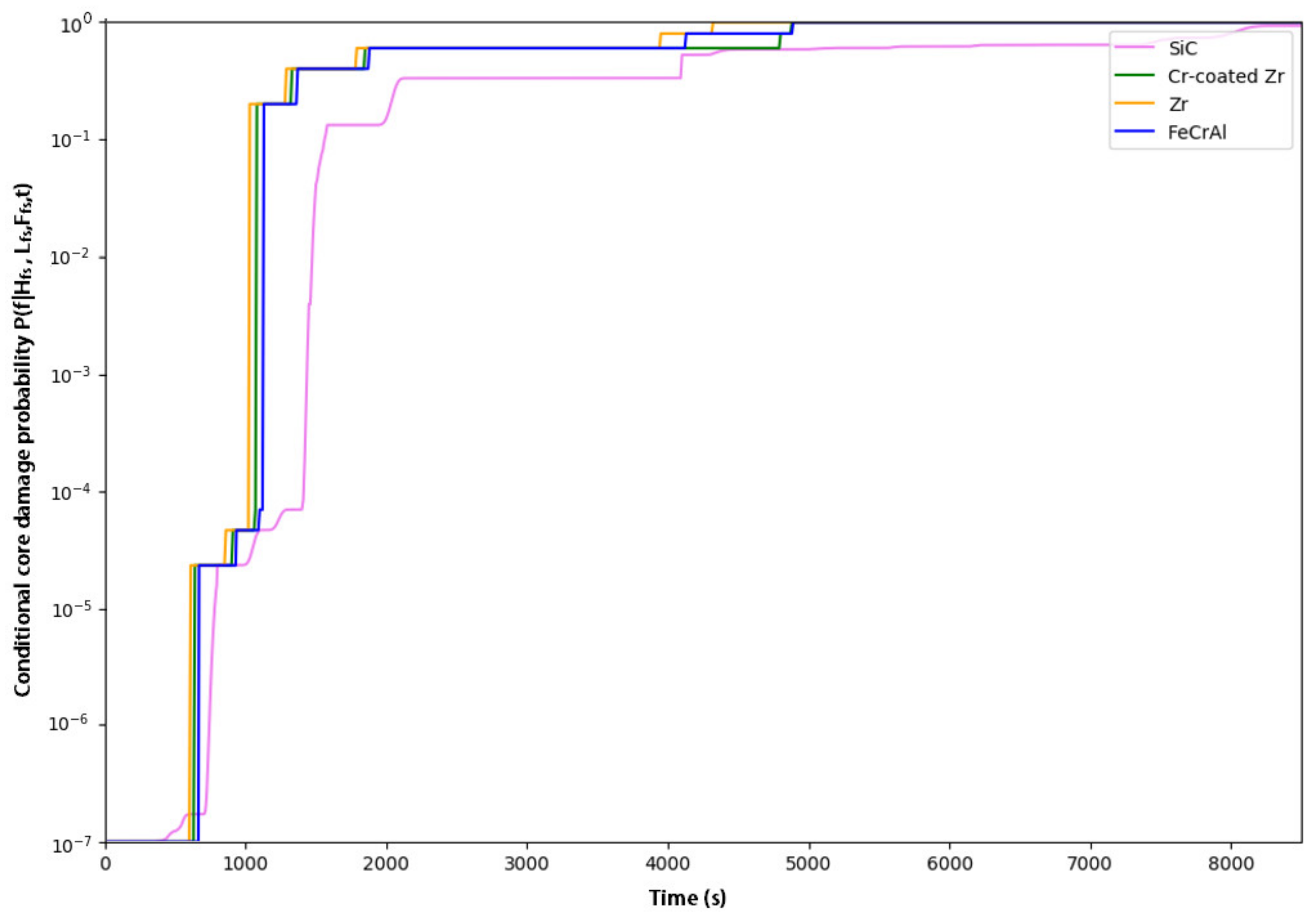
SiCDF is calculated by comparing the unconditional CDF with conditional CDFs. In our case, a similar approach was utilized, but the comparison was made between the two different CDF profiles, one that corresponds to one of the three options ATF only, FLEX only, and ATF with FLEX and the second is the conventional Zr-based fuel. The output is in the form of a cumulative CCDP profile as a function of time. The CCDP profile obtained for conventional zircaloy with the given uncertainties can be considered as a base case
σb (t). A similar profile can be obtained for each of the new safety features (ATF or FLEX) or their combinations
σk (t). The addition of a new feature may shift the CCDP profile, and the area enclosed by the two profiles will give the absolute deviation of the new CCDP from the base case, as shown in
Figure 6. This area can be calculated either by integrating along the x-axis or y-axis as given by Equations (5) and (6), respectively. The horizontal shift of the base cumulative CCDP to the right will provide the benefit in terms of additional CT, while the reduction of CCDP value at any time t will give the risk benefits up to the time t. In other words, we can also interpret
Figure 6. as the probabilistic CT of PWR-based NPP with
Zr and other safety features (ATF or FLEX).
where
is a CCDP risk profile with
Zr (base case) and
is a CCDP risk profile with a new safety feature(s) such as ATF and FLEX.
where t
b(α) and t
a(α) are the inverse functions of
and
, respectively.
where
is a binary distribution such that
a = 1 and
a = 0 correspond to the CCDP with and without adding new safety feature(s)
and can be described as their influence on the output distribution. According to Liu et al. [
20], the CDF-based sensitivity indicator will be defined as given in Equation (8).
and,
or
where, in our research,
α is the CCDP and
will provide the expected CT. Since the sensitivity analysis in this research aims for the benefits associated with various new safety features, we can also define the CDF-based sensitivity indicator
as “Benefit index”. It has to be noted that the time that CCDP reaches the value of 1 is indefinitely large, so we will calculate the benefit over a definite period of time t at which the base risk profile and risk profile with new safety feature(s) converge to a specific value. The enclosed area indicates the benefit of adding the new safety feature(s)
to the existing system. This will be explained in detail for a case study of an MBLOCA in
Section 4.3 and
Section 4.4.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}