
Low Frequency Damping Control for Power Electronics-Based AC Grid Using Inverters with Built-In PSS

Abstract
1. Introduction
2. Modeling and Analysis
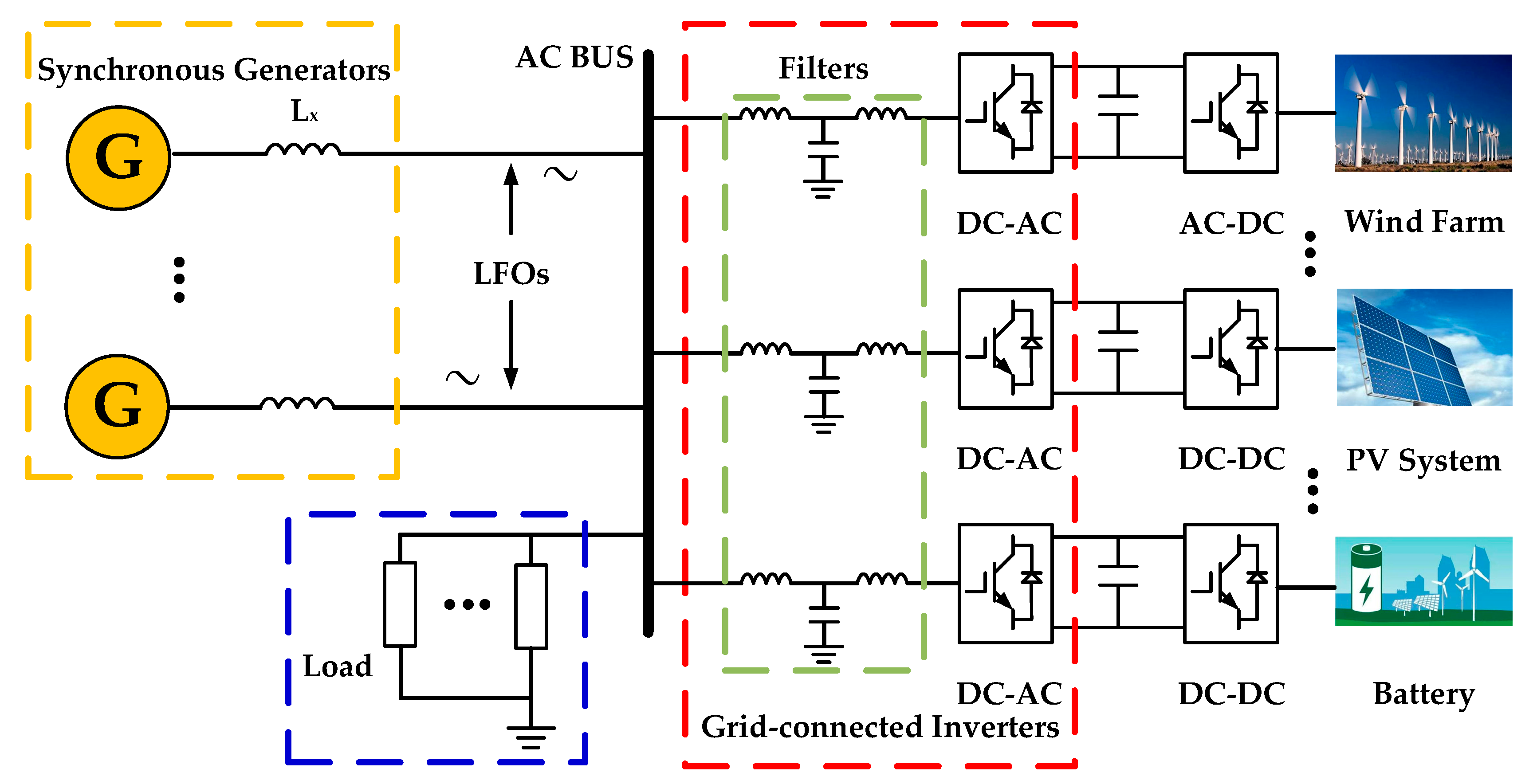
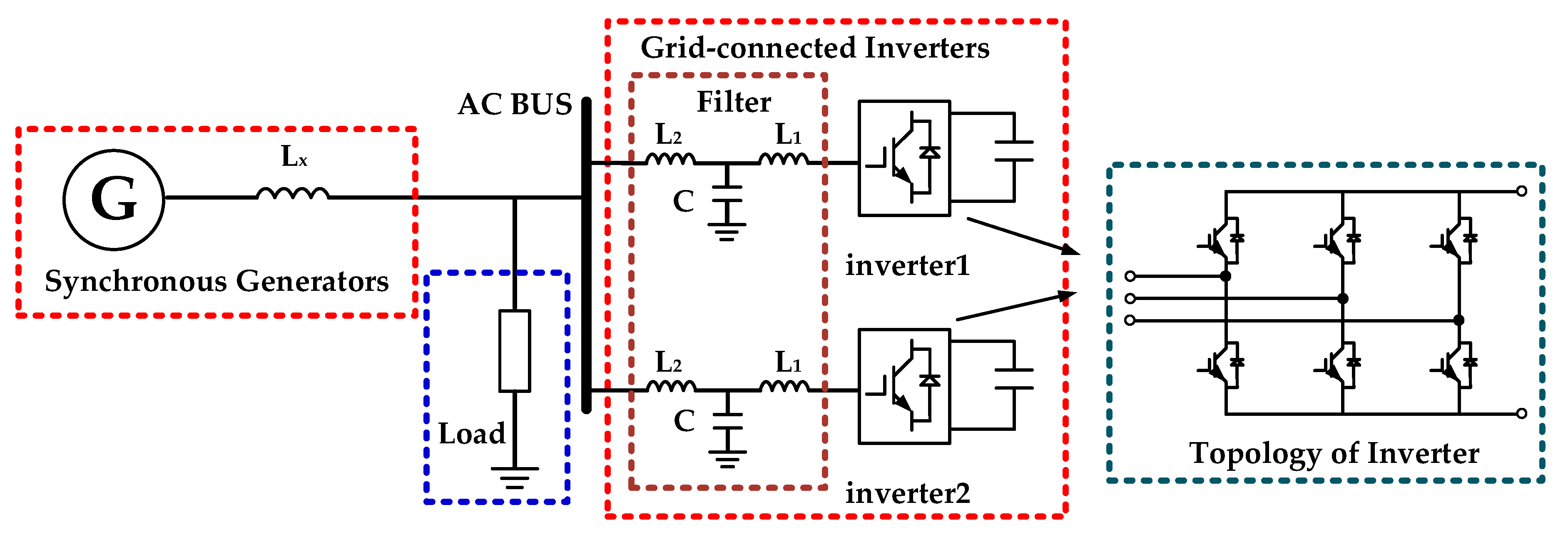
2.1. System Description
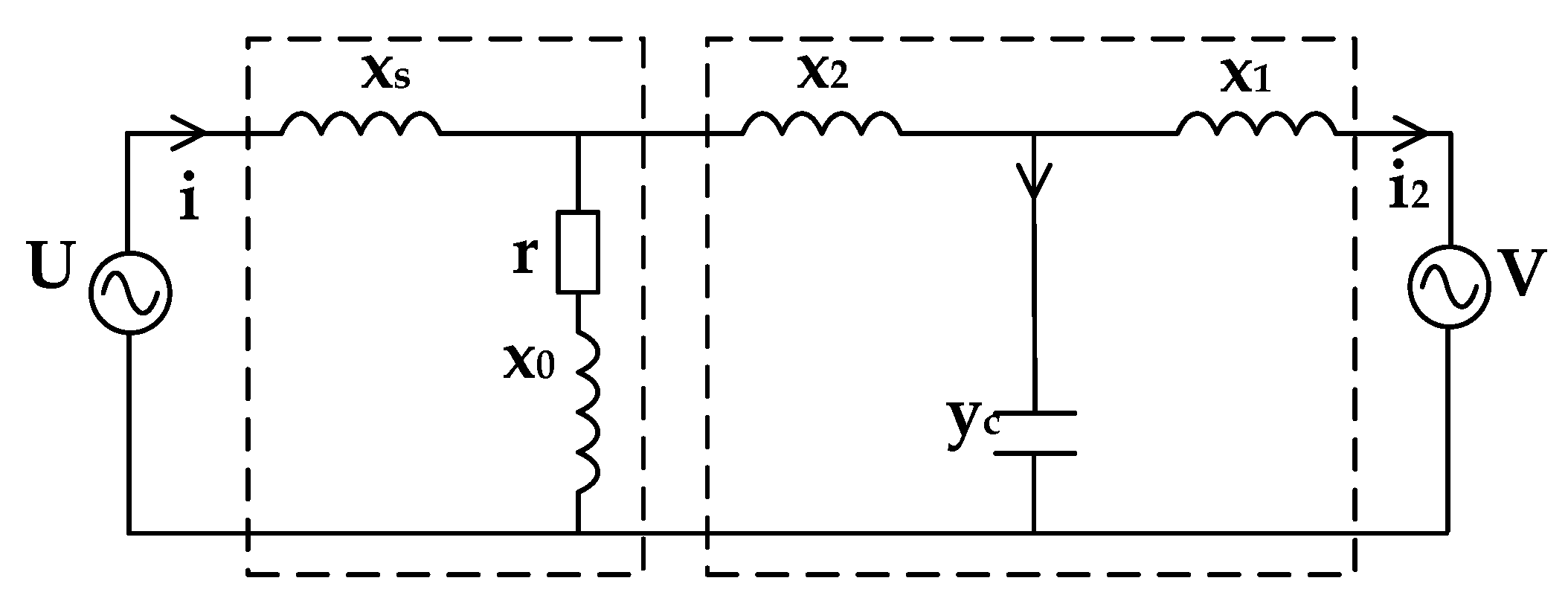
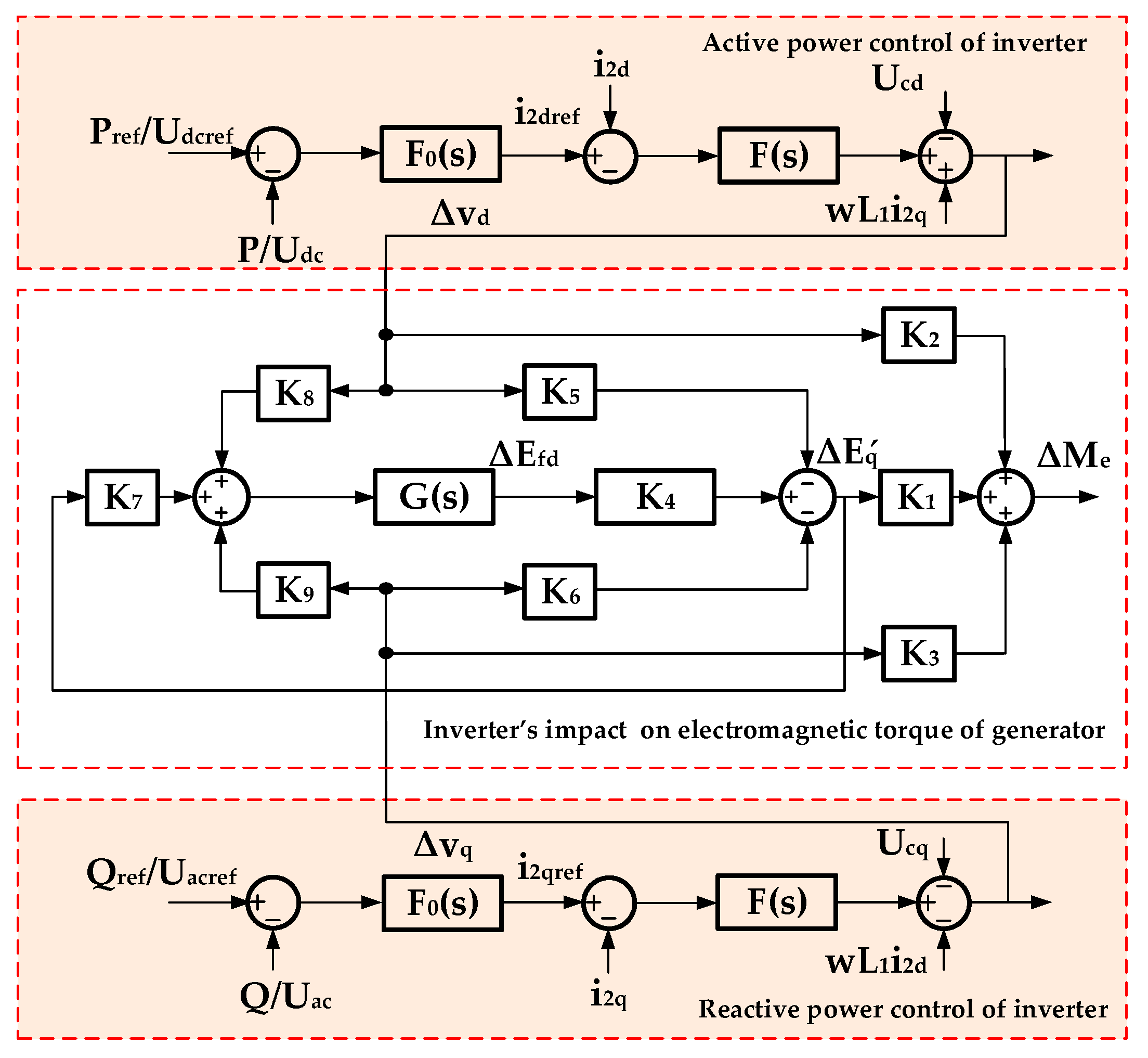
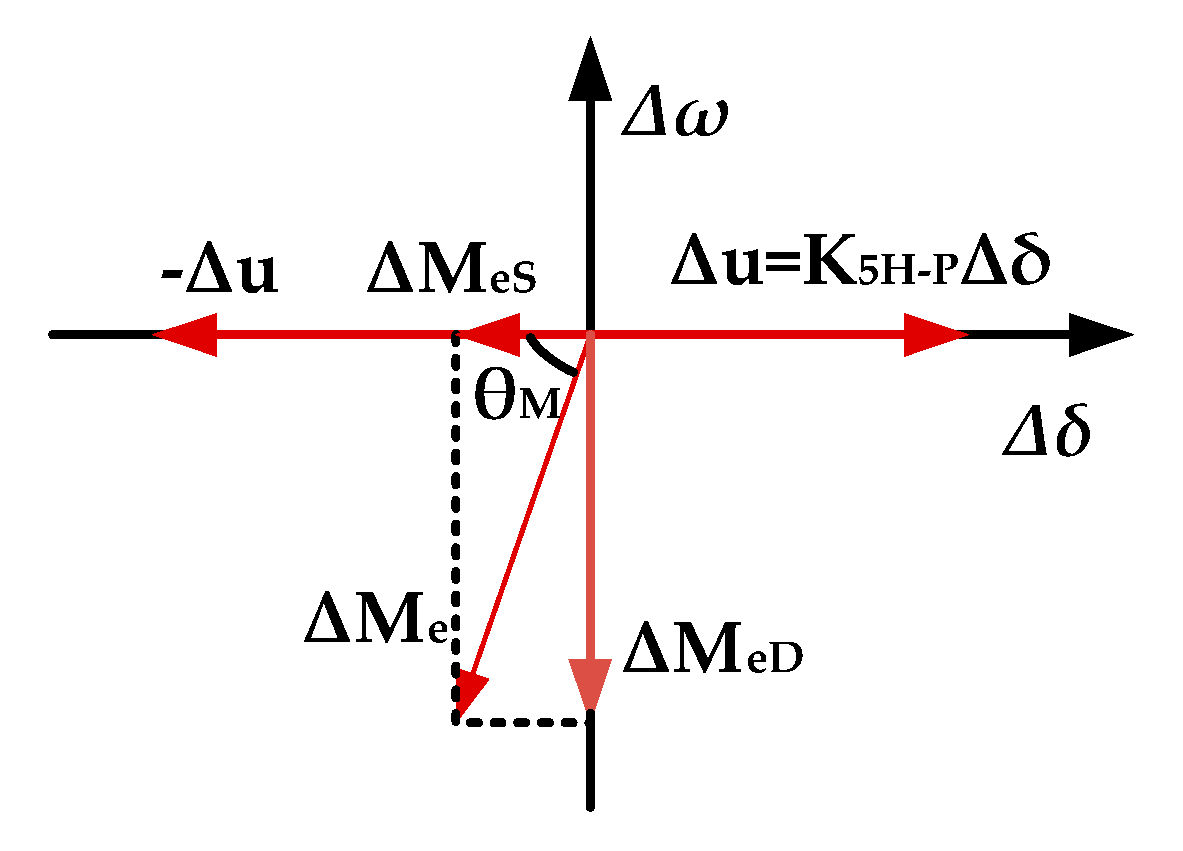
2.2. System Modeling
3. LFOs Suppression Strategy Using Inverter with Built-In PSS
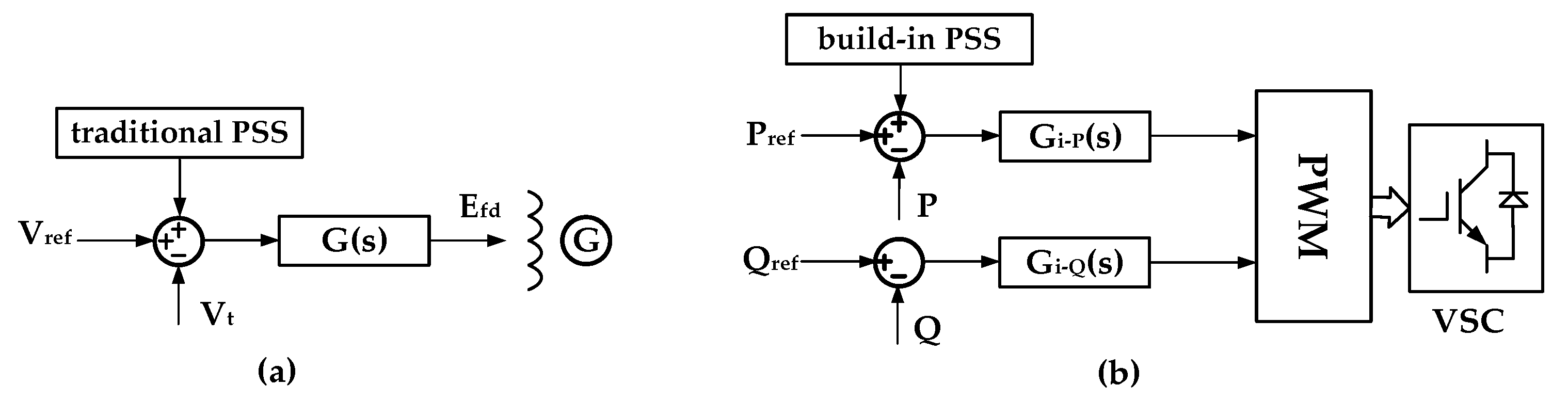
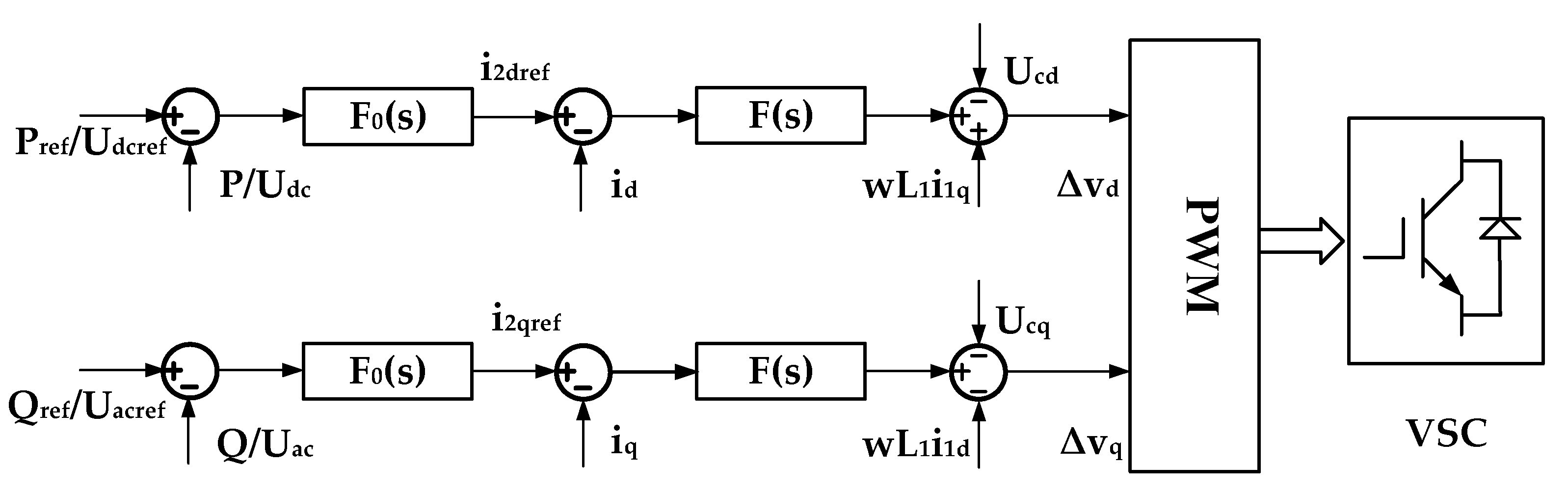
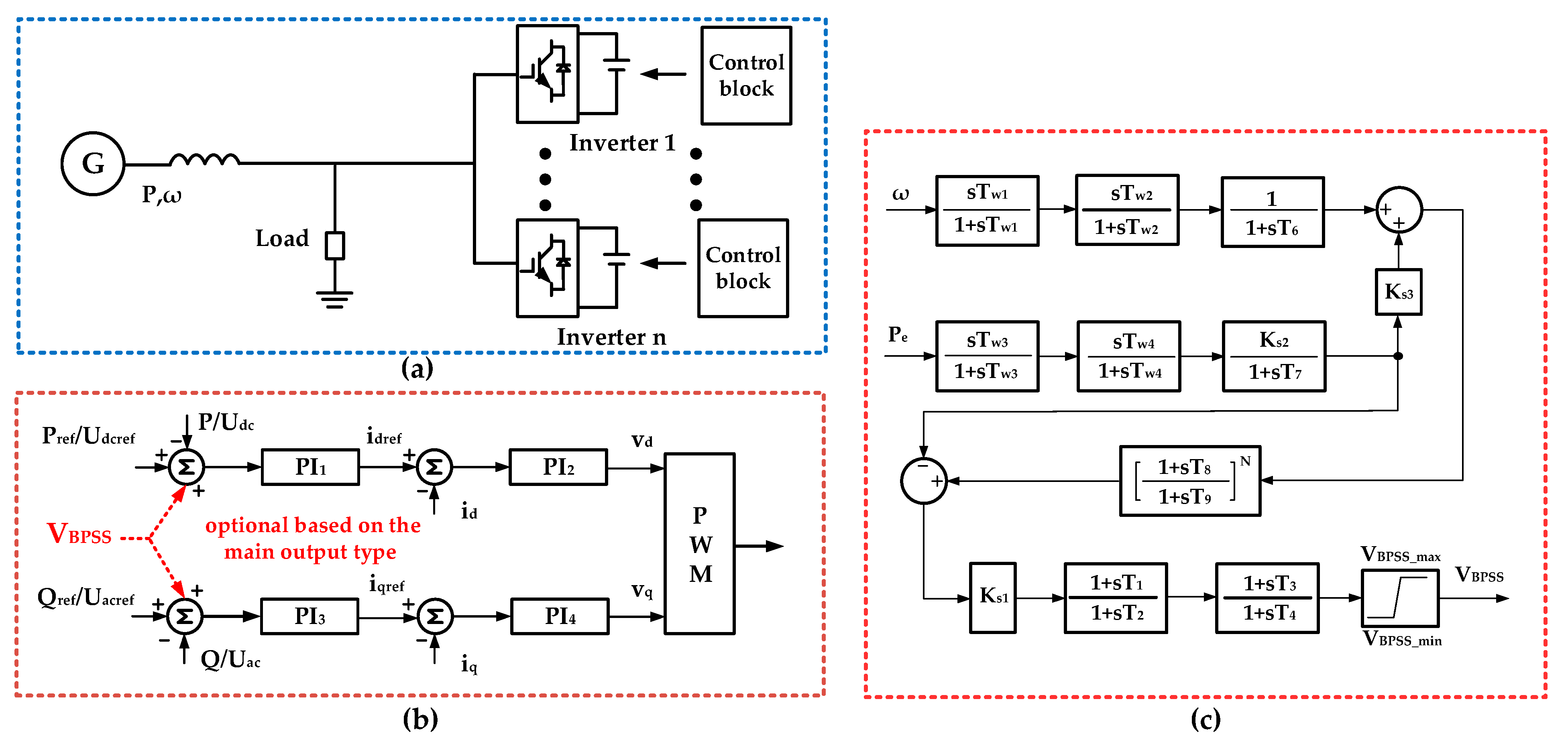
3.1. The Control Structure of the Inverte with Built-In PSS
3.2. Parameters Design Guidline for Built-In PSS
4. Verification
4.1. System Description and Setting
4.2. Parameters Design
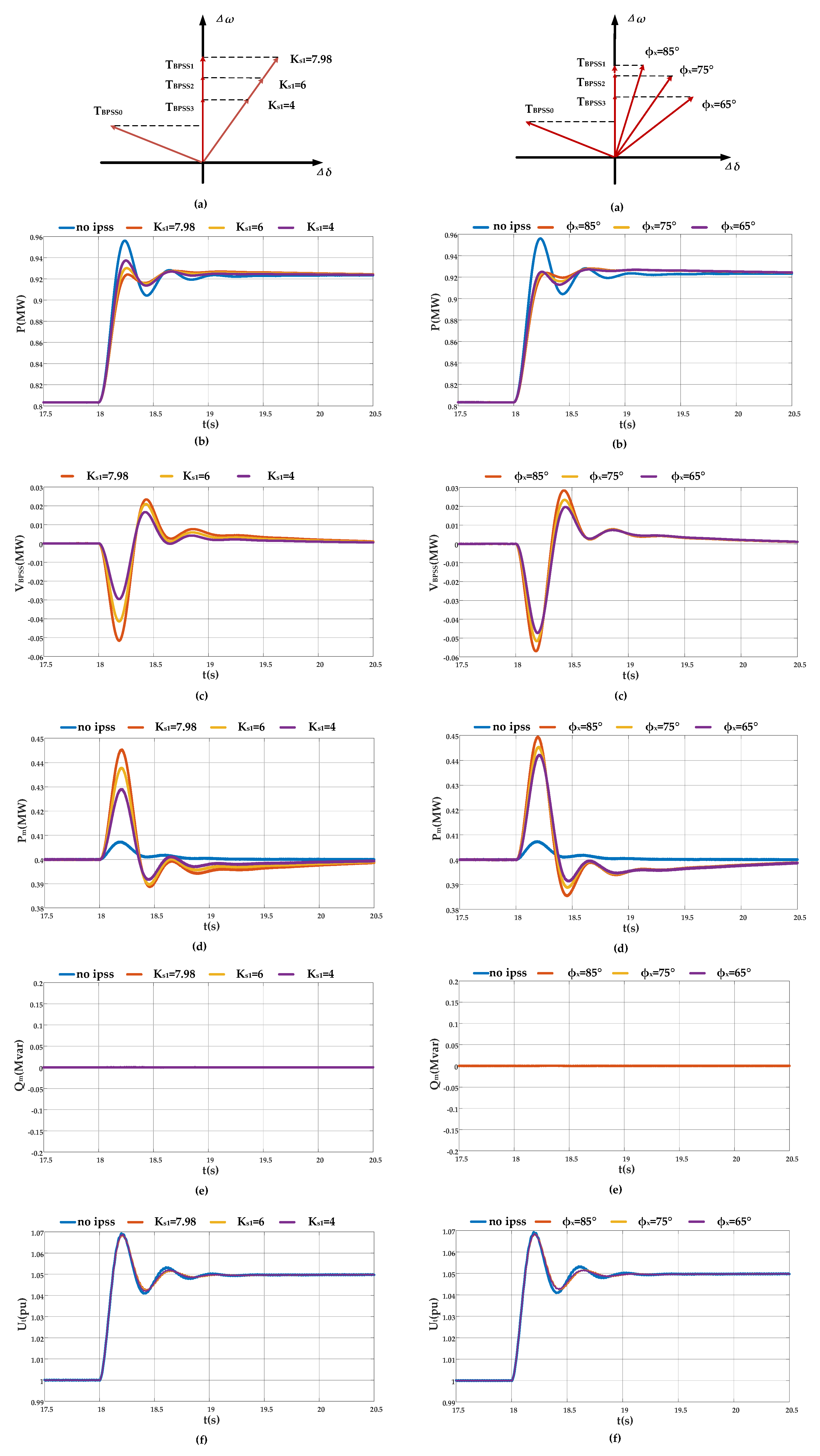
4.3. Damping Effects of Single Grid-Connected Inverter with Different Parameters
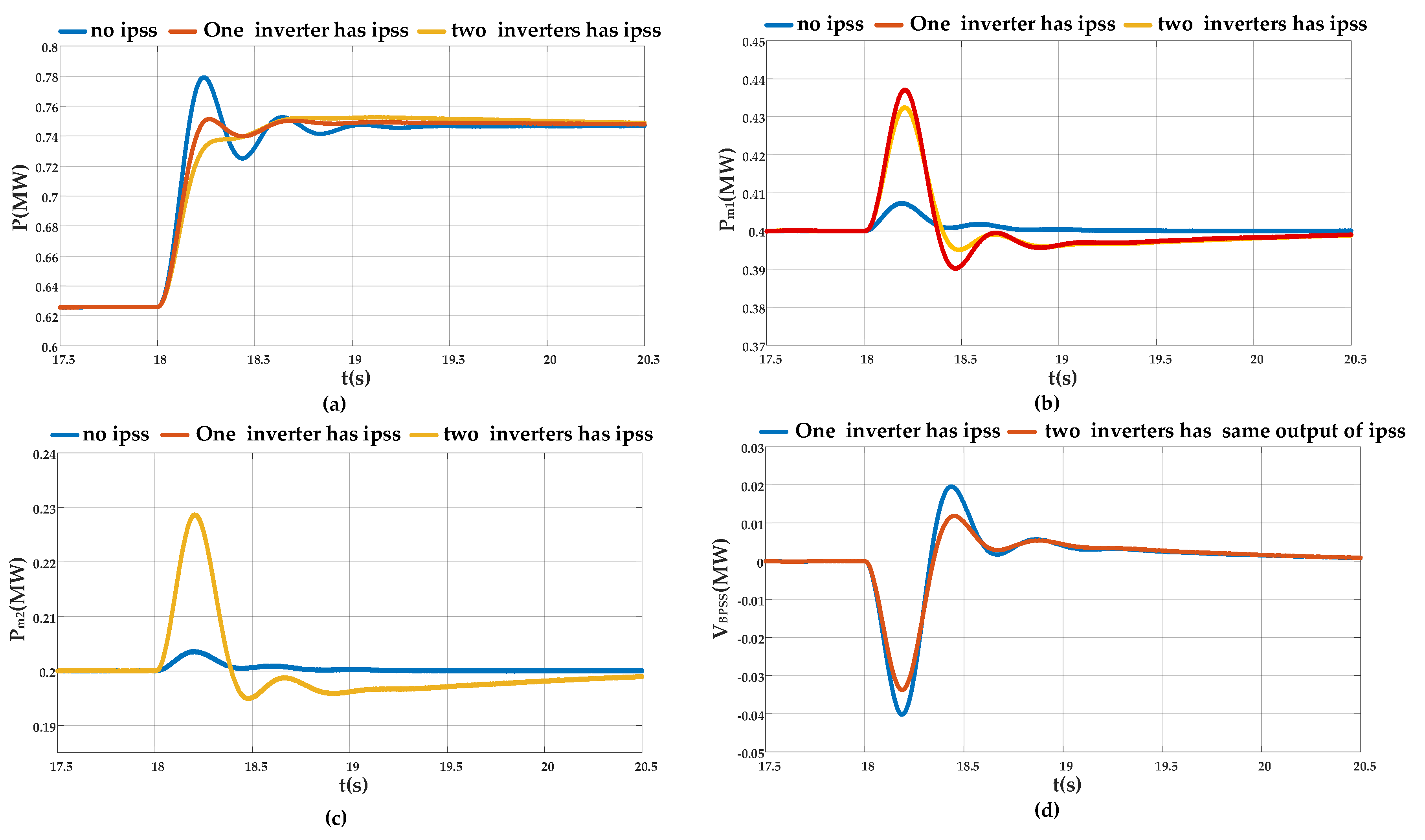
4.4. Damping Effects of Dual Paralleled Grid-Connected Inverters
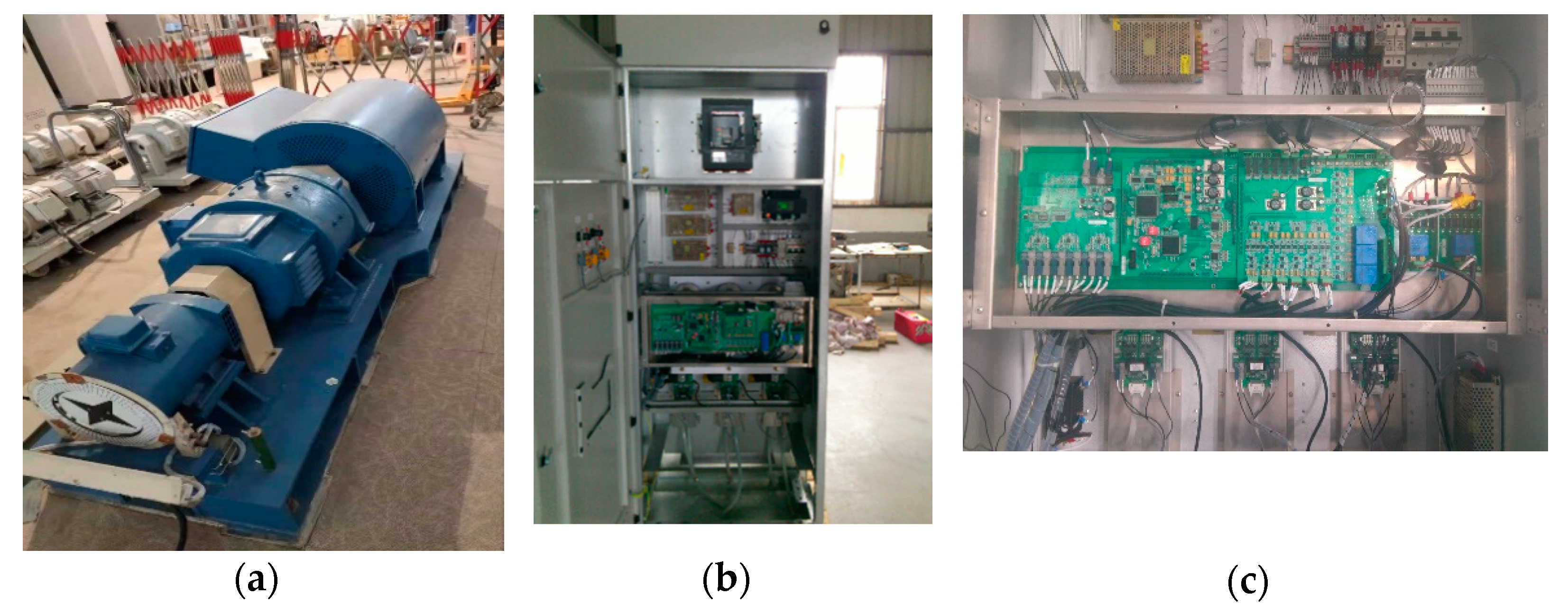
4.5. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chompoobutrgool, Y.; Ghandhari, M.; Vanfretti, L. Survey on power system stabilizers control and their prospective applications for power system damping using synchrophasor-based wide-area systems. Eur. Trans. Electr. Power 2011, 21, 2098–2111. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Qi, J.; Wu, Q.; Zhang, Y.; Weng, G.; Zhou, D. Unified residue method for design of compact wide-area damping controller based on power system stabilizer. J. Mod. Power Syst. Clean Energy 2020, 8, 366–375. [Google Scholar] [CrossRef]
- Zhong, Q.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Stability assessment and optimization methods for microgrid with multiple VSG units. IEEE Trans. Smart Grid 2018, 9, 1462–1471. [Google Scholar] [CrossRef]
- Jiang, Q.; Li, B.; Liu, T. Large-scale power base’s impact on low frequency oscillation characteristic in UHVAC power transmission system. IEEE Access 2019, 7, 56423–56430. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Zhou, J.; Shi, P.; Gan, D.; Xu, Y.; Xin, H.; Jiang, C.; Xie, H.; Wu, T. Large-scale power system robust stability analysis based on value set approach. IEEE Trans. Power Syst. 2017, 32, 4012–4023. [Google Scholar] [CrossRef]
- Chen, H.; Yu, W.; Liu, Z.; Yan, Q.; Tasiu, I.A.; Han, Z. Low-frequency instability induced by hopf bifurcation in a single-phase converter connected to non-ideal power grid. IEEE Access 2020, 8, 62871–62882. [Google Scholar] [CrossRef]
- Zhou, J.; Ke, D.; Chung, C.Y.; Sun, Y. A computationally efficient method to design probabilistically robust wide-area PSSs for damping inter-area oscillations in wind-integrated power systems. IEEE Trans. Power Syst. 2018, 33, 5692–5703. [Google Scholar] [CrossRef]
- Xiong, L.; Zhuo, F.; Wang, F.; Liu, X.; Chen, Y.; Zhu, M.; Yi, H. Static synchronous generator model: A new perspective to investigate dynamic characteristics and stability issues of grid-tied PWM inverter. IEEE Trans Power Electron. 2016, 31, 6264–6280. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wen, J.; Wu, Q.H.; Cheng, S. Wide-area damping controller of FACTS devices for inter-area oscillations considering communication time delays. IEEE Trans. Power Syst. 2014, 29, 318–329. [Google Scholar] [CrossRef]
- Zhang, C.; Ke, D.; Sun, Y.; Chung, C.Y.; Xu, J.; Shen, F. Coordinated supplementary damping control of DFIG and PSS to suppress interarea oscillations with optimally controlled plant dynamics. IEEE Trans. Sustain. Energy 2018, 9, 780–791. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A. Equivalence of virtual synchronous machines and frequency-droops for converter-based microgrids. IEEE Trans. Smart Grid. 2014, 5, 394–395. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Small signal stability analysis of three-phase AC systems in the presence of constant power loads based on measured D-Q frame impedances. IEEE Trans. Power Electron. 2015, 30, 5952–5963. [Google Scholar] [CrossRef]
- Amin, M.; Molinas, M. Small-signal stability assessment of power electronics based power systems: A discussion of impedance- and eigenvalue-based methods. IEEE Trans. Ind. Appl. 2017, 53, 5014–5030. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Analysis of D-Q small-signal impedance of grid-tied inverters. IEEE Trans. Power Electron. 2016, 31, 675–686. [Google Scholar] [CrossRef]
- Ashabani, M.; Mohamed, Y.A.R.I. Mohamed. Integrating VSCs to weak grids by nonlinear power damping controller with self-synchronization capability. IEEE Trans. Power Syst. 2014, 29, 805–813. [Google Scholar] [CrossRef]
- Kalcon, G.O.; Adam, G.P.; Anaya-Lara, O.; Lo, S.; Uhlen, K. Small-signal stability analysis of multi-terminal VSC-based DC transmission systems. IEEE Trans. Power Syst. 2012, 27, 1818–1830. [Google Scholar] [CrossRef]
- Hassan, L.H.; Moghavvemi, M.; Almurib, H.A.; Muttaqi, K.M. A coordinated design of PSSs and UPFC-based stabilizer using genetic algorithm. IEEE Trans. Ind. Appl. 2014, 50, 2957–2966. [Google Scholar] [CrossRef]
- Zhang, K.; Shi, Z.; Huang, Y.; Qiu, C.; Yang, S. SVC damping controller design based on novel modified fruit fly optimization algorithm. IET Renew. Power Gener. 2017, 12, 90–97. [Google Scholar] [CrossRef]
- Zuo, J.; Li, Y.; Shi, D.; Duan, X. Simultaneous robust coordinated damping control of power system stabilizers (PSSs), static var compensator (SVC) and doubly-fed induction generator power oscillation dampers (DFIG PODs) in multi machine power systems. Energies 2017, 10, 565–588. [Google Scholar]
- Ahmed, M.; Vahidnia, A.; Datta, M.; Meegahapola, A. An adaptive power oscillation damping controller for a hybrid AC/DC microgrid. IEEE Access 2020, 8, 69482–69495. [Google Scholar] [CrossRef]
- Kerdphol, T.; Waranabe, M.; Hongesombut, K.; Mitani, Y. Self-adaptive virtual inertia control-based fuzzy logic to improve frequency stability of microgrid with high renewable penetration. IEEE Access 2019, 7, 76071–76083. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, J.; Li, Y.; Gan, C.; Li, H.; Liu, Y. A gain scheduling wide-area damping controller for the efficient integration of photovoltaic plant. IEEE Trans. Power Syst. 2019, 34, 1703–1715. [Google Scholar] [CrossRef]
- Wan, C.; Huang, M.; Tse, C.K.; Ruan, X. Effects of interaction of power converters coupled via power grid: A design-oriented study. IEEE Trans. Power Electron. 2015, 30, 3589–3600. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of dynamic characteristics between virtual synchronous generator and droop control in inverter based distributed generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Huang, L.; Xin, H.; Wang, Z. Damping low-frequency oscillations through VSC-HVDC stations operated as virtual synchronous machines. IEEE Trans. Power Electron. 2018, 34, 5803–5818. [Google Scholar] [CrossRef]
- Faraji, A.; Naghshbandy, A.H.; Baayeh, A.G. A hybrid coordinated design method for power system stabilizer and FACTS device based on synchro squeezed wavelet transform and stochastic subspace identification. J. Mod. Power Syst. Clean Energy 2020, 1–10. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | |
|---|---|---|
| system impedance | Ls | 0.1 mH |
| load | r | 0.082 Ω |
| L0 | 0.082 mH | |
| DC source | Vdc | 400 V |
| Generator | x′d | 0.0361 Ω |
| xq | 0.2238 Ω | |
| T′d0 | 3.55 | |
| id0 | 1093.7 A | |
| iq0 | 1803.7 A | |
| ud0 | 285.6726 V | |
| uq0 | 117.17 V | |
| u0 | 308.77 V | |
| EQ0 | 361.96 V | |
| Sbase | 1 MVA | |
| Utbase | 20 kV | |
| excitation system control | kp | 100 |
| ki | 60 | |
| LCL filter | L1 | 0.2 mH |
| L2 | 0.04 mH | |
| C | 15 uF | |
| Inverter control Fo(s) | kpo | 4 |
| kio | 20 | |
| Inverter control F(s) | kpi | 4 |
| kii | 100 | |
| Tw1 | Tw2 | Tw3 | Tw4 | T6 | T7 | M |
| 2 | 2 | 2 | 2 | 0 | 10 | 5 |
| N | Ks2 | Ks3 | T8 | T9 | T1 | T2 |
| 1 | 3.2 | 1 | 0.2 | 0.05 | 0.0868 | 0.01 |
| T3 | T4 | Ks1 | VBPSS_max | VBPSS_max | ||
| 0.0868 | 0.01 | 7.98 | 0.08 MW | −0.08 MW |
| Parameters | Values | |
|---|---|---|
| Generator | Sbase | 30 kVA |
| Utbase | 400 V | |
| x’d | 0.3556 pu | |
| xq | 1.0825 pu | |
| T’d0 | 6.55 | |
| LCL filter | L1 | 0.2 mH |
| L2 | 0.04 mH | |
| C | 15 uF | |
| load | r | 2.4 Ω |
| DC source | Vdc | 400 V |
| Tw1 | Tw2 | Tw3 | Tw4 | T6 | T7 | M |
| 2 | 2 | 2 | 2 | 0 | 10 | 5 |
| N | Ks2 | Ks3 | T8 | T9 | T1 | T2 |
| 1 | 3.2 | 1 | 0.2 | 0.05 | 0.15 | 0.01 |
| T3 | T4 | Ks1 | VBPSS_max | VBPSS_max | ||
| 0.15 | 0.01 | 6.3 | 0.9 kW | −0.9 kW |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Cao, W.; Lin, T.; Zhao, J.; Li, W. Low Frequency Damping Control for Power Electronics-Based AC Grid Using Inverters with Built-In PSS. Energies 2021, 14, 2435. https://doi.org/10.3390/en14092435
Yang M, Cao W, Lin T, Zhao J, Li W. Low Frequency Damping Control for Power Electronics-Based AC Grid Using Inverters with Built-In PSS. Energies. 2021; 14(9):2435. https://doi.org/10.3390/en14092435
Chicago/Turabian StyleYang, Ming, Wu Cao, Tingjun Lin, Jianfeng Zhao, and Wei Li. 2021. "Low Frequency Damping Control for Power Electronics-Based AC Grid Using Inverters with Built-In PSS" Energies 14, no. 9: 2435. https://doi.org/10.3390/en14092435
APA StyleYang, M., Cao, W., Lin, T., Zhao, J., & Li, W. (2021). Low Frequency Damping Control for Power Electronics-Based AC Grid Using Inverters with Built-In PSS. Energies, 14(9), 2435. https://doi.org/10.3390/en14092435