1. Introduction
Recently, Korean electric power systems (KEPS) have been experiencing some cascading outages of generators and photovoltaic (PV) systems. The unusual temperatures and wrong setting parameters of some protective devices lead to cascading outages. On March 28 2020, when Shin Boryeong Unit 1 (coal-fired, 805 MW) suddenly stopped, the grid frequency dropped to 59.8 Hz after 10 s, and the PV system in the grid considered it a low frequency and stopped. Also, it was found that the frequency further dropped to 59.67 Hz [
1]. About 15.8 GW of the generated solar power from KEPS is lost when recognizing abnormal frequencies, especially when the frequency drops to 59.3–59.8 Hz.
Korea has recently announced the 9th Basic Plan of Long-Term Electricity Supply and Demand, which aims at having 78.1 GW of renewable energy by 2034 [
2]. As shown in
Table 1, the capacity of coal should decrease from 34.7 GW in 2020 to 29.0 GW in 2034. For the 30 abolished coals, 24 will be converted to liquefied natural gas (LNG). Also, during the same period, the capacity of LNG facilities should increase from 41.3 to 60.6 GW. Moreover, the plan aims at maintaining the current gradual reduction in the number of nuclear power plants and the increase in the number of renewable energy facilities. It is predicted that the capacity of nuclear power plants will decrease from 24.7 GW in 2019 to 19.4 GW in 2034 and that the capacity of renewable energy facilities will increase from 19.3 to 78.1 GW.
As more variable renewable sources are frequently installed in KEPS, the reliable assessment and operation of power systems with a high penetration of renewable energy should depend on network applications and on good-quality data acquisition. Therefore, one of the most challenging tasks for today’s power system engineers in Korea is the development and operation of renewable energy management systems (REMSs) to be used by operators for proper power system operation and planning. In Korea, REMSs are currently under development, and they usually involve hardware, data acquisition, databases, applications, and displays, as shown in
Figure 1.
In an REMS, although online data may include incorrect data due to communication failures or the scale-factor errors of telemetered points, the state estimation is calculated on the basis of the actual state of a power system using analog and digital data obtained from supervisory control and data acquisition systems (SCADA) [
3,
4]. Once a state estimation is carried out, the network’s estimated state should be evaluated in two aspects: network analysis and economic operation. A dynamic stability assessment is applied to the calculation of the penetration of renewable energy, and the final solution of the REMS is determined to control the amount of generated renewable energy based on various application outputs, as shown in
Figure 1. Then, the security-constrained economic dispatch uses the state estimation results as inputs and calculates the desired megawatt (MW) output limit for all the units while considering the transmission constraints in normal and contingency conditions.
The state estimation reliability depends on various factors, such as power system modeling and the quality of the telemetered data and pseudo measurements. In KEPS, renewable energy and transformers are among the most important factors in state estimation, as the measurements associated with them are very lacking. In KEPS, the state estimation cannot be calculated up to the exact transformer tap positions because of its unique feature such as lack of measurement. In order to overcome these problems, a state estimation technique that adopts a robust tap estimation algorithm and an accurate connectivity model is required for REMSs.
Many have researched this topic and proposed various techniques. To enhance the accuracy of state estimation, these research efforts focused on developing three functions. The first one is enhancing the accuracy of the state estimation using phasor measurement unit (PMU). Algorithm for estimating the state variables based on a limited number of PMU as well as determining the optimal PMU placement was proposed [
5,
6,
7]. To enhance the performance of state estimation using various measurements based on the remote terminal unit (RTU) and PMU, the robust and fast algorithm with the linear weighted least square (WLS) technique and the architecture based on a multistage scheme is proposed [
8,
9,
10]. The second function is identifying the topology and measurement errors of devices using practical heuristic methods. A state estimation monitoring tool based on pseudo measurements, statistic functions, and coherency checks was proposed, and it could detect potential topology errors and enhance the performance of state estimation [
11,
12]. The third function is a residual sensitivity method based on the WLS approach, which detects and replaces bad data points using normalized residuals. The largest normalized residual method with highly efficient technique was proposed [
13]. A method for detecting and identifying topology errors using the recursive Bayesian approach and its improved version was proposed [
14]. Also, an orthogonal iteratively re-WLS for solving equality-constrained state estimations was estimated to power system state variables and transformer tap positions under erroneous zero-power injections [
15]. Although it showed good features in estimating the tap positions of transformers based on both approaches, this approach is still insufficient of practicality, as there is a lack in comparative studies that are based on large-scale power systems and in extensive testing trials that use many topology errors. However, various enhanced algorithms for state estimation were proposed and tested in small testing and power systems, including non-variable resources.
In this paper, a methodology for implementing the state estimation and enhancing the accuracy in large-scale power systems that partially depend on variable renewable energy resources. The methodology implemented in this paper is detailed below:
First, the structure of the application common database of renewable energy management systems containing power system components based on a physical node is constructed. The application common database is composed of a node-breaker model and bus-branch model for enhancing the accuracy and speed of network applications. The aggregated renewable energy is modeled as a generator, transformer and collector transmission line to estimate the actual system. To overcome the shortage of measurement connected to transformer, the connectivity model of a transformer using a switching device is proposed.
Second, the simple heuristic method based on the condition of feasibility check are proposed to decrease the effects of the lack of measurements of three winding transformer, two winding transformer, and step-up transformer. As the renewable energy expands, the accuracy of state estimation should be depended on the measurement associated with transformer connected to renewable energy. The heuristic method is applied to the topology processing as a preprocessing function.
Third, the state estimation based on the fast-decoupled WLS approach is implemented to estimate the actual state of the power systems including variable renewable energy resources based on decoupled gain matrix, pseudo measurement and bad data processing. The bad data processing is composed of an inner processing module and outer processing module. The inner processing module based on the largest normalized residue method deals with the bad data detection, identification, and adjustment. The tap position was estimated through a modified sensitivity calculation for reactive flow and voltage measurements. The outer processing module performs the function of analyzing that the bad measurement selected in inner processing exceeds the condition of Kirchhoff’s current law. The outer processing method is applied to the bad data processing as a postprocessing function
Finally, the performance of the proposed methodology is validated through the comprehensive tests based on a modified IEEE 18-bus test system and a large-scale power system that utilizes renewable energy. The performance for large-scale power system is validated through the dynamic test for assessing the performance requirements based on ERCOT, analyzing the system at different meter accuracy range, and performing the pseudo measurement processing and bad data processing for severe events.
3. Renewable State Estimation
3.1. Topology Error Model Associated with Transformer
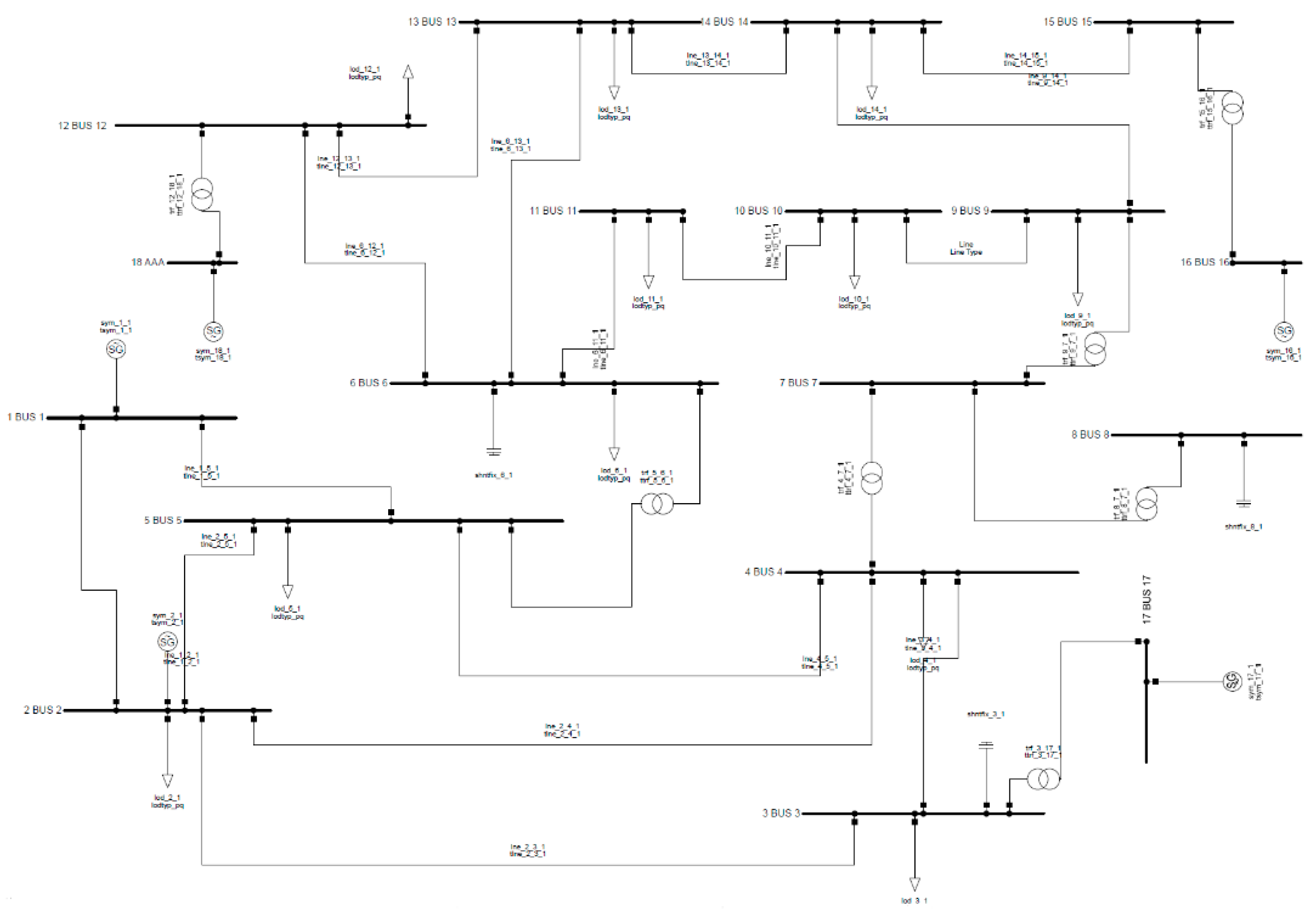
In KEPS, transformers are among the critical parameters in state estimation because the active power (MW) and reactive power (MVAR) of the secondary winding and the tap position of the primary winding are only obtained for substations. Also, the telemetered data associated with step-up transformers in power stations do not exist. Recently, the tap positions of unattended substations were measured, and the measured values were included in bad measurements. As shown in
Figure 4, the lack of measurement data associated with transformers as well as the use of suspected data may cause an observability problem as well as inaccurate state estimation results. Because of these problems, the tap estimation function was not well operated in KEPS. To get a precise expression for improving the accuracy of state estimation, a connectivity model of a three-winding transformer using switching devices and common nodes is proposed, as shown in
Figure 5.
The three-winding transformer is modeled using two-winding transformers connected together at a common bus that has no physical meaning. Three circuit breakers (CBs) are connected at the common bus, which controls the in or out of service status of the transformer. As shown in
Figure 6, the procedure of analyzing the three-winding transformer is described as follows:
- (1)
Step 1: Add the TRCB #1, #2, and # 3 w.r.t the three-winding transformer connected to the common node (ND) if topology processing runs firstly.
- (2)
Step 2: Create a dynamic link between the common ND of the three-winding transformer and the CB. Some links between the three-winding transformer and the ND as well as between the CB and the three-winding transformer should be added.
- (3)
Step 3: Perform the feasibility check based on the CB’s state and measurements of P, Q and Tap associated with transformer as shown in
Table 2.
- (4)
Step 4: Assign the status of the new CB based on the state of the equipment connected to the three-winding transformer based on the conditions of feasibility check.
- (5)
Step 5: Perform a topology processing and state estimation to prevent the MVAR flow toward the open winding of the transformer
Through the proposed approach, the operating states of the three-winding transformer were dynamically determined by handling the status of the switching devices without additional OFFDB. From the database of the EMS perspective, the new links among the CB, ND, and three-winding transformer were created at the step of the OFFDB, which is based on the CIM and is stored in an Oracle relational database management system. If the proposed scheme w.r.t the three-winding transformer was processed in an OFFDB, several functions, such as a modification of the three-winding transformer in the CIM, would have been modified and validated. Importantly, the OFFDB validation was among the critical factors in the EMS. However, these approaches are very complex.
3.2. State Estimation Methodology
The state estimation algorithm is based on a fast-decoupled WLS technique, which uses a decoupled right-hand side and a constant decoupled gain matrix computed at a flat voltage. The state estimation can be mathematically formulated as in the following problem [
20,
21,
22]:
where
fi = a function used to calculate the value measured using the
ith measurement;
σi2 = variance for the ith measurement;
J(
x) = measurement residual;
Nm = number of independent measurements;
zimeas = ith measured quantity;
Ns = number of unknown parameters.
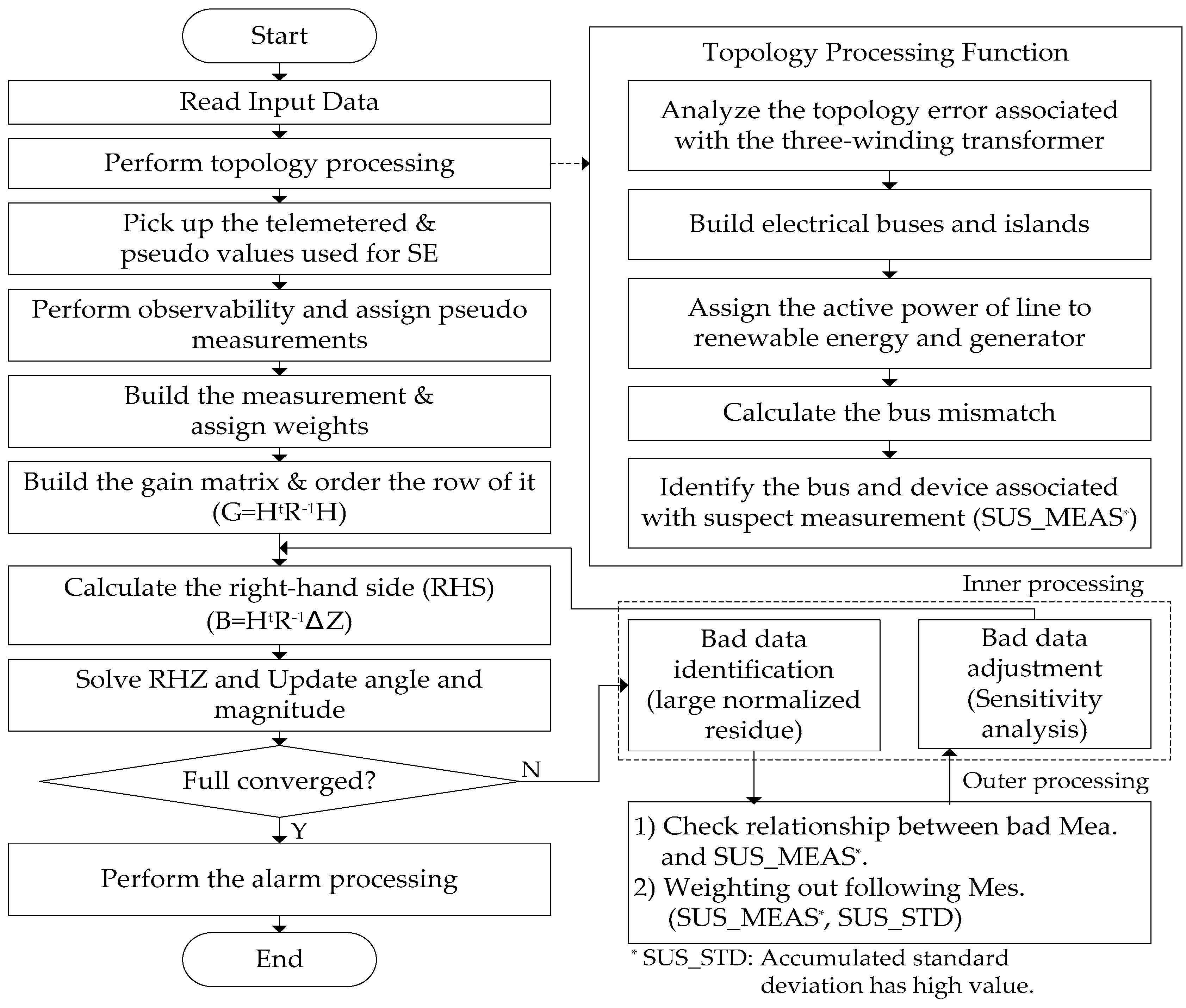
Figure 7 shows the overall flow chart of the state estimation adopting the proposed algorithm for the fast WLS approach and bad data processing.
To solve the value of
G∙Δ
x = B, forward and backward substitutions using the factorized gain matrix should be performed. The fast-decoupled WLS method uses a fixed gain matrix. This approach calculates two gain matrices for the voltage angle and magnitude. The gain matrix assigns in-service buses to the rows of the gain matrix. Depending on the type of measurement, off-diagonal entries are created. Two gain matrices are created: the MW-angle and MVAR-magnitude. The structure of the two matrices is the same. To improve the accuracy, the high-voltage direct current (HVDC) system and flexible AC transmission system (FACTS) are modeled. For the HVDC system, the direct current (DC) is defined as a state variable to be estimated in the MW-angle iteration [
23].
Vd and
X denote the DC voltage and the reactance of the DC line, respectively.
The
FACTSoutput corresponding to its terminal voltage is calculated using Equation (3). If the
FACTSoutput will be outside limits, the change of MVAR is calculated and voltage magnitude is updated.
FACTSvalue denote the last estimated value, and
FACTSvalue denote the last estimated value.
3.3. Inner Bad Data Processing
The bad data processing of the MW-angle iteration handles the MW measurements, DC measurements, and phase shift taps, whereas the bad data processing of the MVAR-magnitude iteration handles the MVAR and voltage. There is a simple methodology for computing the bad data processing, and it is illustrated as follows:
- (1)
Identify the measurement with the highest normalized residue (
rNi) and check if its normalized residue is above a pre-specified limit.
where
Πi is the
ith diagonal of the residual sensitivity matrix
W. The sensitivity matrix can be written as [
20,
21,
22]
- (2)
Perform the outer bad data processing and confirm the bad measurement.
- (3)
Calculate the replacement of the identified bad measurement. The replacement is expressed as
where
m is the number of measurements.
- (4)
Adjust the calculated voltage magnitudes and angles and the other measurements residue based on the bad measurement replacement.
- (5)
Go back to Step 1 until all the bad measurements are processed. If the number of iterations w.r.t the bad data processing is more than the threshold value, skip the bad data processing step.
3.4. Outer Bad Data Processing
The outer function is performed to analyze the influence of the identified bad measurements. If the measurements exceed the condition of Kirchhoff’s current law (KCL), the weighting factor of the measurements is decreased. The condition of KCL is described as follows:
- (1)
If the measurement is related with the results of topology error model associated with transformer, the measurement is selected.
- (2)
If the accumulated standard deviation and bias of the measurement using Equation (8) has high value, the measurement is selected.
3.5. Tap Position Estimation
As shown in
Table 3, the metering point of the transformer is less than that of the other devices, such as the transmission line, generator, shunt, and HVDC. In KEPS, as the grid connection of the renewable energy increases, the telemeter point associated with the transformer affects the state estimation accuracy. To enhance the accuracy of the tap position estimation of the two- and three-winding transformers, the modified residues of the MVAR flow and voltage at one terminal of the transformer are used to decide if a magnitude tap adjustment is required. The tap is adjusted until the measurement residue is minimized. The tap position estimation is adopted to the bad data processing for the MVAR-magnitude iteration. The proposed method of the transformer tap position is as follows:
- (1)
Assign the active power of the transmission line and transformer to the active power of the renewable energy generator, as shown in
Figure 4. The weighting factor of the renewable energy generator is set as pseudo.
- (2)
Calculate the bus mismatch of the secondary side of the transformer in the substation. If the mismatch is rather a threshold value, the measurement connected to the bus is regarded as a suspect flag.
- (3)
Perform a tap position estimation if the state estimation is partially converged. Calculate the sensitivities of the MVAR flow and bus voltage to the measurements of each transformer based on Equation (9). Then, compute the
kth column of
HtR−1 in the sensitivity matrix. Afterward, perform a forward/backward substitution with the gain matrix and multiple H and substitute one.
where
m and
n denote the number of measurements associated with the MVAR flows of the branch and injection and the bus voltages for each transformer, respectively.
- (4)
Adjust the transformer tap based on Equation (9) if the adjustment value is more than the threshold value.
- (5)
Go back to Step 3 until all the transformers with an on-load tap changer are processed.
5. Conclusions
In this paper, a methodology for implementing the state estimation and enhancing the accuracy in large-scale power systems including various renewable energy resources is presented, and it showed accurate and reliable performance in the studied REMS.
First, the application common database for analyzing the power system is proposed based on node-breaker model, bus-branch model and linked list method. Renewable energy was modeled by the basis of the point of data acquisition, the type of renewable energy, and the voltage level of the bus-connected renewable energy. The connectivity model of a three winding transformer using a switching device is proposed to overcome the lack of measurements related to transformer.
Second, the procedure of analyzing the topology error associated with the three-winding transformer is proposed based on simple heuristic method which could be analyzed and identified the suspect measurements using the condition of feasibility check. This is a pre-processing, which assign the active power of line to the renewable energy generator, calculate the bus mismatch, and identify the suspect measurements and buses. Third, the state estimation based on the fast-decoupled WLS approach and bad data processing is implemented. The bad data processing based on two stages is proposed. One stage is an inner-processing, which estimates the MW, MVAR, voltage, and tap position through a normalized residue and modified sensitivity calculation. Two stage is an outer-processing, which analyze the validation of the bad measurement selected in inner processing using the condition of Kirchhoff’s current law. Through the two steps, the proposed algorithm could be estimated for the power system with a lack of the measurements associated with a transformer because of the expanding renewable energy.
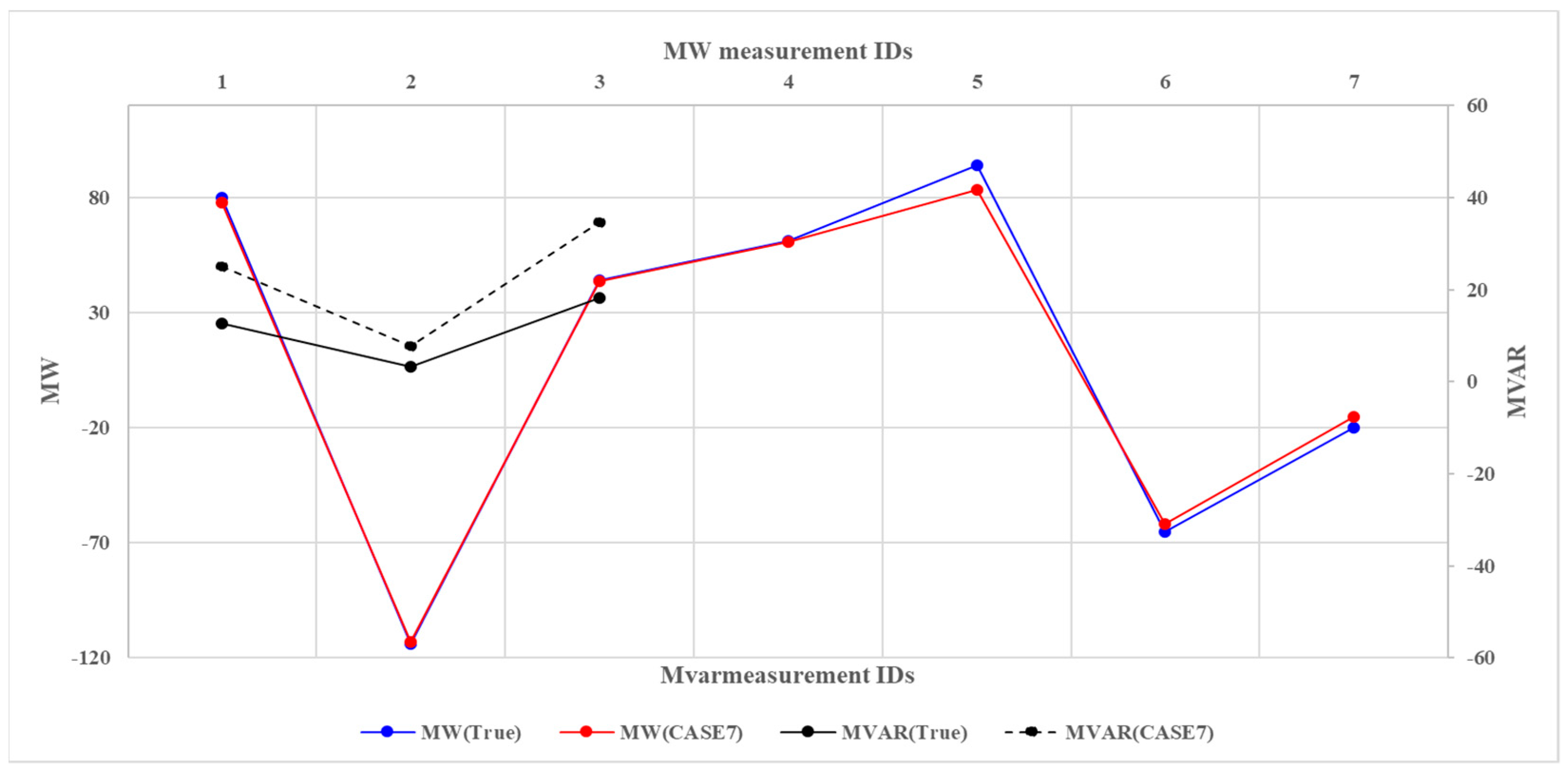
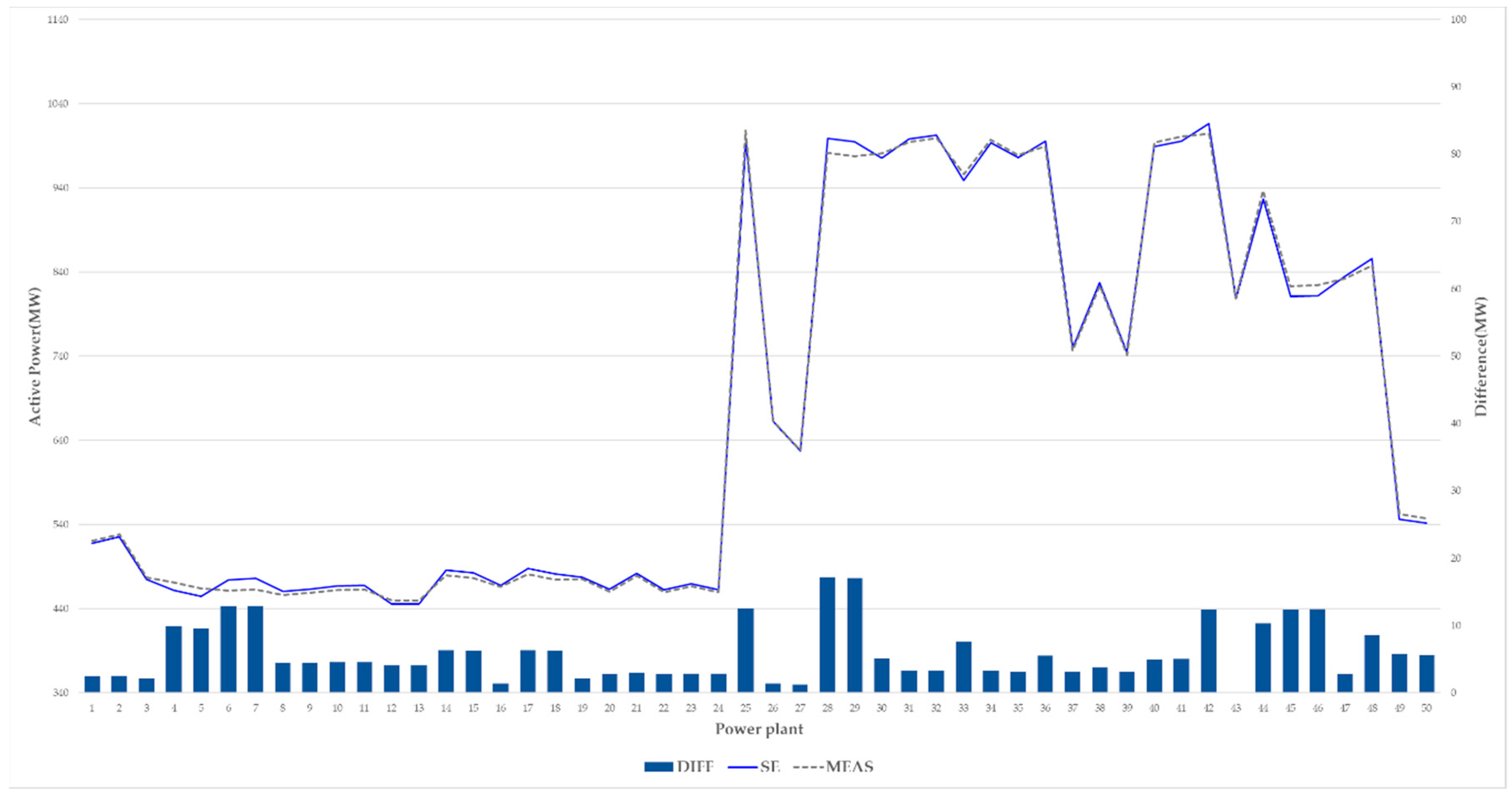
Finally, through static and dynamic tests, a comprehensive set of simulation results have shown that the proposed algorithm can provide accurate power system estimations. A static test was also performed to validate the individual function of the state estimation based on a modified IEEE 18-bus test system. Also, a comparative study among the proposed algorithm, PowerFactory, and measurement is performed. Furthermore, the dynamic test results exhibited good agreement between the solution of the state estimation and the telemetered data with some variances and severe events. The validation test for assessing the performance requirements based on ERCOT is carried out. Although the measurement consists of a set of data received from SCADA and RTU, the state estimation was simulated for different meter suspects ranging from 3% to 10%. For the suspect data from 3% to 10% of 4320, the rate of convergence has decreased from 97% to 88% with small difference between the estimated value and measurement.
The limitations of the methodology implemented in this paper and various simulation is detailed below:
The proposed algorithm based on the WLS technique, inner and outer bad data processing, pseudo measurement processing, and topology error processing, etc. has advantage of fast execution speed, convergence and computationally easy. However, the WLS technique is sensitive to the initial condition and the data quality of measurement. In order to solve these problems, pseudo measurement and topology error processing should be applied.
The dynamic test is analyzed using a set of measurements received from SCADA and RTU. Especially, a variety of analyzes of cases involving measured renewable energy with various penetration level was lacking. The installed capacity of renewable energy is 19,700 MW. Most of the renewable energy is the distributed generation connected to distribution system.
As renewable energy expanded, the effect of the components associated with renewable energy will be increasing in the platform of the EMS. Every time state estimation is performed, the results of state estimation could be changed because of the large variability of renewable energy. To deal with this situation, a robust algorithm is needed.
To enhance the accuracy and performance of the proposed algorithm, the future research of this paper is described as follows:
The WLS method based on a full coupled gain matrix, QR decomposition, and PMU will be studied. Full gain matrix and QR decomposition should increase the numerical stability and convergence characteristics.
The extensive case study for increasing penetration of renewable energy will be analyzing after various sets of measurements received from electric utility.
To create the input data with high penetration and various power system conditions, the replica data creation based on a real time digital simulator (RTDS) will be considered.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















