
Research on Zero-Voltage Ride Through Control Strategy of Doubly Fed Wind Turbine


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
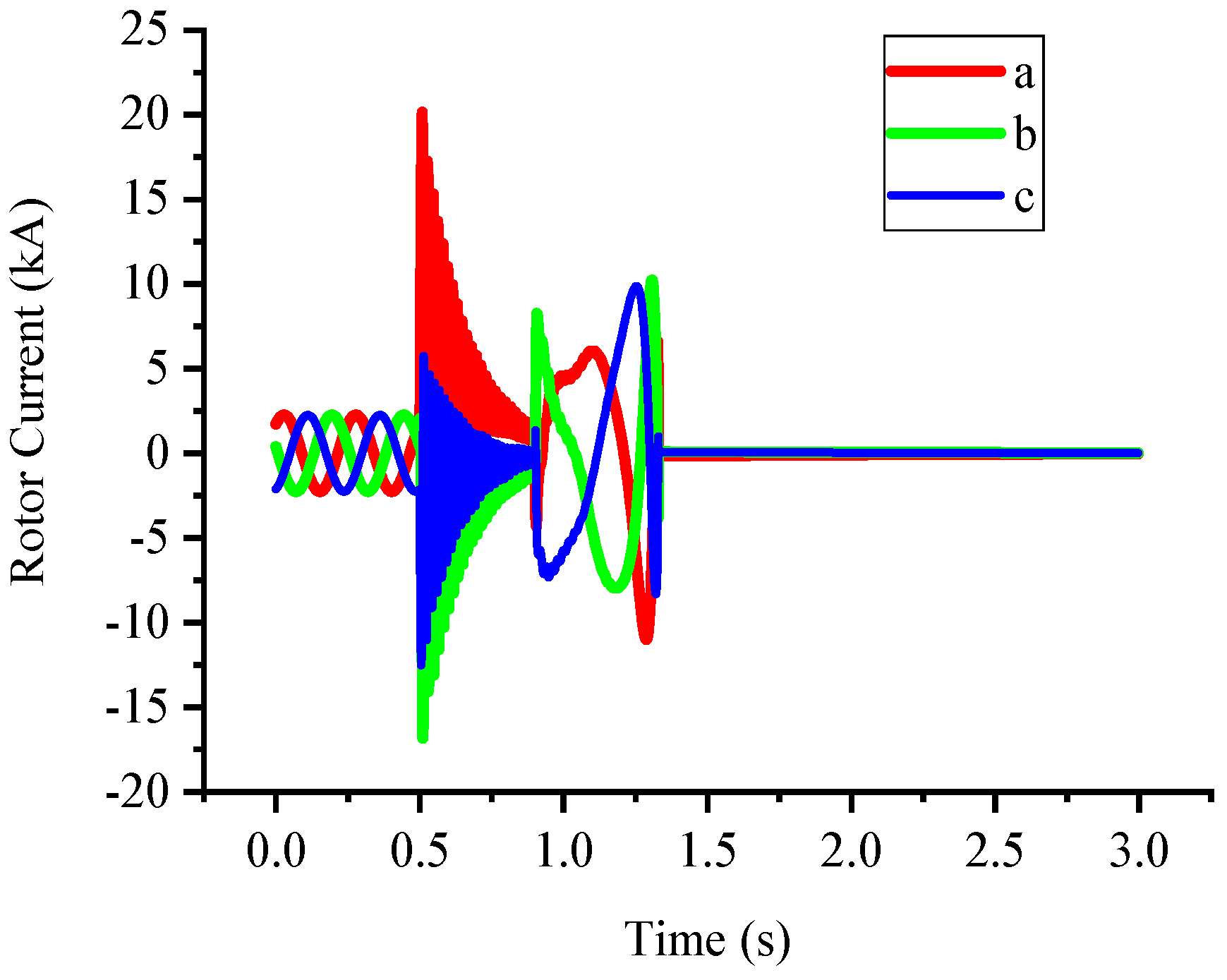
- The transient process of the DFIG during three-phase short-circuit fault is analyzed in detail. The mechanism of the rotor overcurrent and the DC bus overvoltage of the DFIG during a fault is studied and verified by simulation.
- (2)
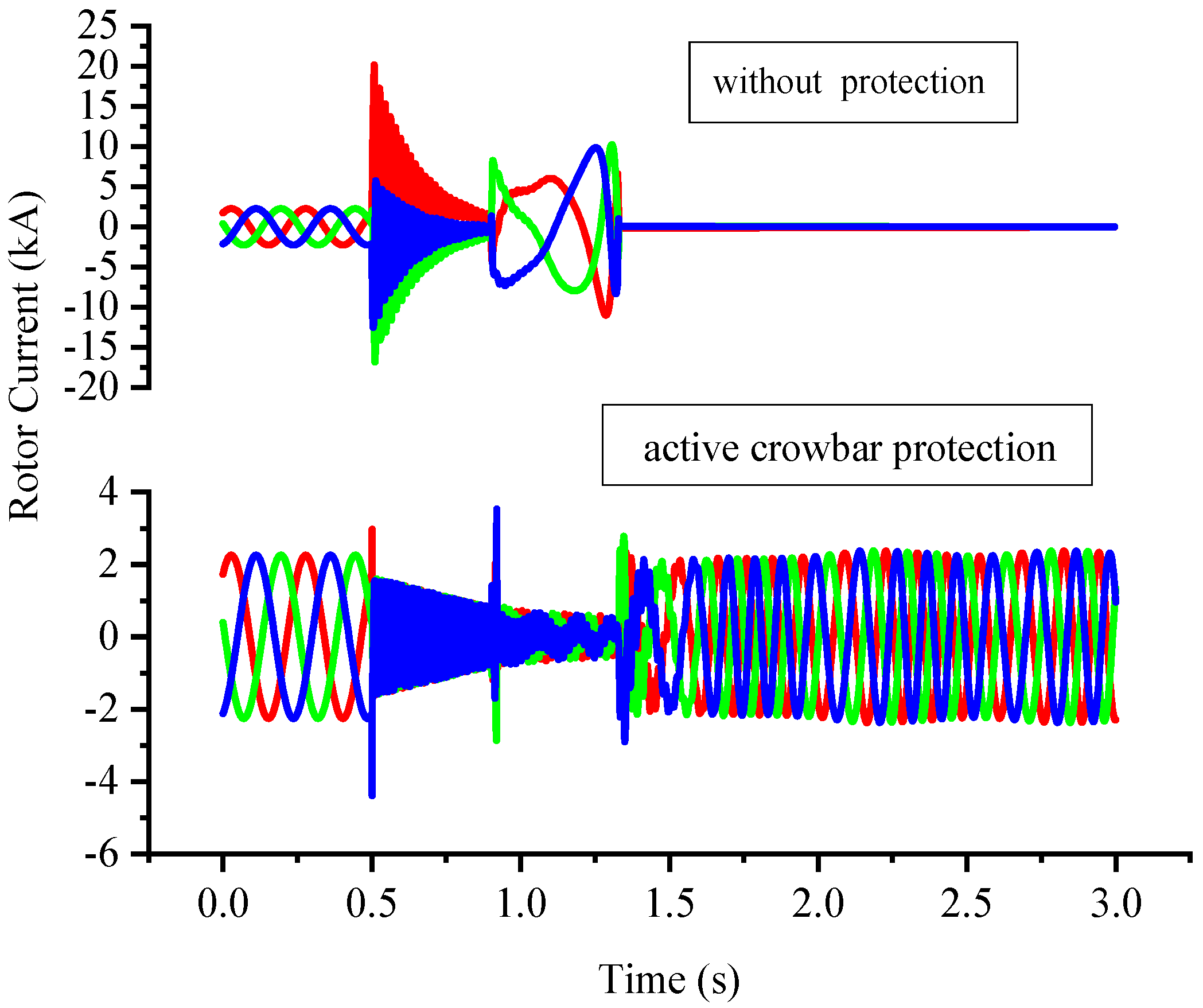
- The resistance value and switching strategy of the active crowbar hardware protection circuit are determined, and the control strategy of the grid side converter is improved.
- (3)
- A cooperative control strategy based on extended state observer (ESO), terminal sliding mode control and active crowbar protection circuit is proposed.
- (4)
- Through the coordinated control, DC bus voltage rising, which is caused by the increase in the protection circuit resistance value to restrain rotor current, is reduced under the condition of severe voltage sag. In other words, the crowbar hardware protection circuit is improved, which is not only suitable for low voltage ride through DFIG. The simulation results show that the zero-voltage ride through of the DFIG can be realized.
2. Zero-Voltage Ride through Mechanism of Doubly Fed Wind Turbine
2.1. Transient Analysis of Stator and Rotor under Three-Phase Short-Circuit Fault
2.2. Transient Analysis of the DC Bus
3. Control Measures for Zero-Voltage Ride Through of the Doubly Fed Wind Turbine
3.1. Control Measure for Rotor Side of the Doubly Fed Wind Turbine
3.1.1. The Structure and Principle of Active Crowbar Protection Circuit
3.1.2. Resistance Value Determination of Active Crowbar Protection Circuit
3.1.3. Switching Strategy of Active Crowbar Circuit
3.1.4. Simulation Analysis
3.2. Control Strategy of AC/DC Grid Side Converter
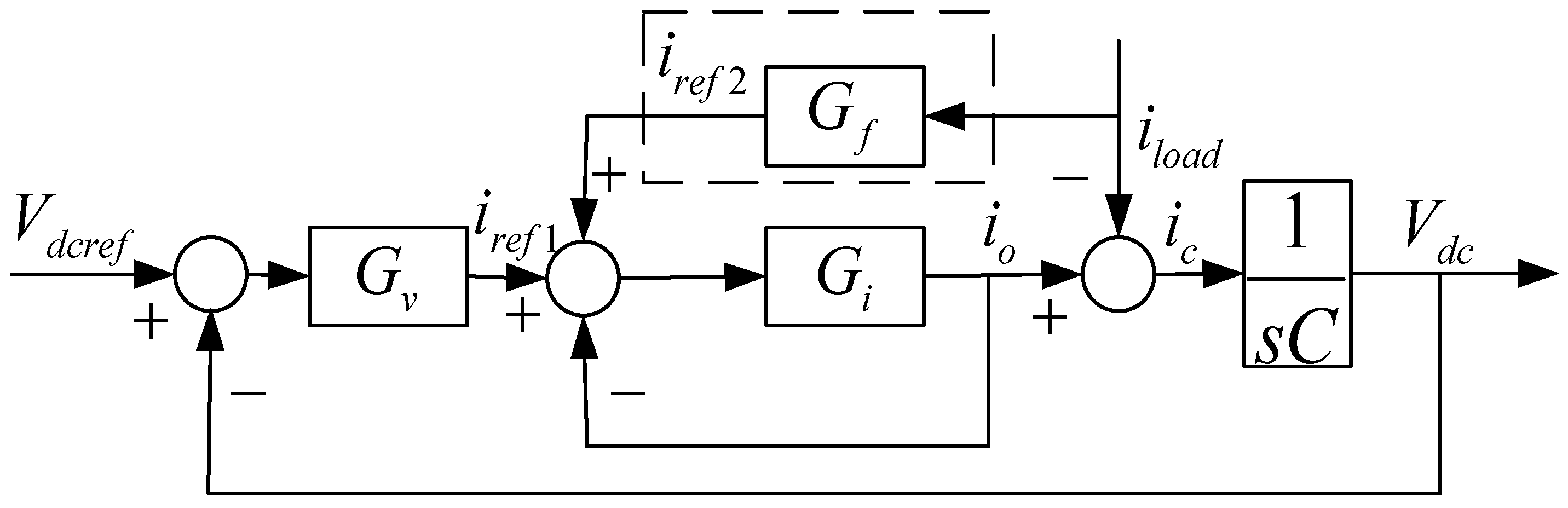
3.2.1. Basic Principle of Current Feedforward Control
3.2.2. Terminal Sliding Mode Current Feedforward Control Based on Extended State Observer
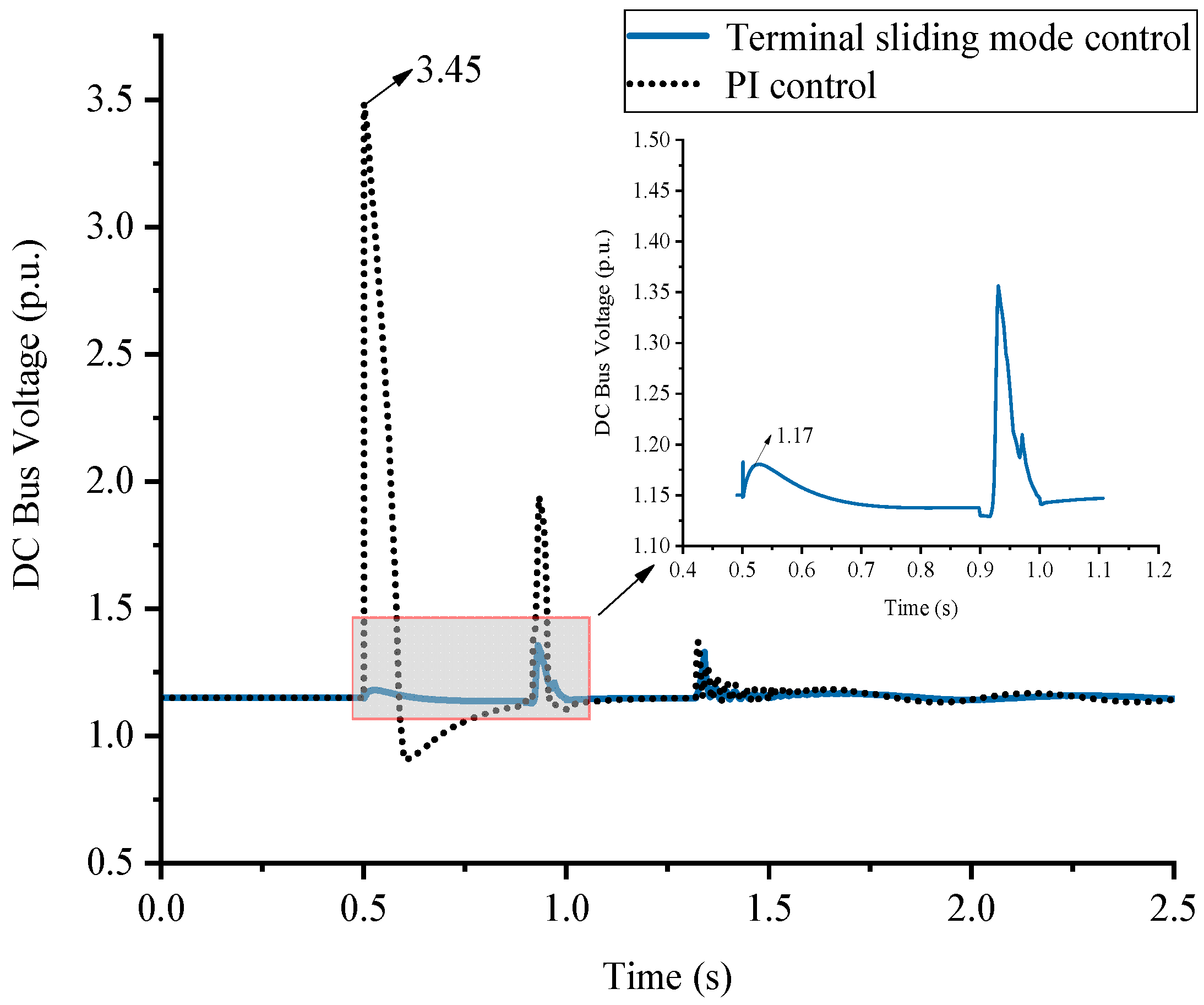
3.2.3. Simulation Analysis
4. Case Simulation Analysis of Zero-Voltage Ride Through Cooperative Control Strategy for Doubly Fed Induction Generator
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Jiang, Z.; Liu, Y. Low-voltage ride-through remote testing method for offshore wind turbines. IEEE Trans. Instrum. Meas. 2020, 69, 2905–2913. [Google Scholar] [CrossRef]
- Wen, G.; Chen, Y.; Zhong, Z.; Kang, Y. Dynamic voltage and current assignment strategies of nine-switch-converter-based DFIG wind power system for low-voltage ride-through (LVRT) under symmetrical grid voltage dip. IEEE Trans. Ind. Appl. 2016, 52, 3422–3434. [Google Scholar] [CrossRef]
- Abad, G.; Rodríguez, M.A.; Poza, J.; Canales, J.M. Direct torque control for doubly fed induction machine-based wind turbines under voltage dips and without crowbar protection. IEEE Trans. Energy Convers. 2010, 25, 586–588. [Google Scholar] [CrossRef]
- Wei, Q.; Wu, B.; Xu, D.; Zargari, N.R. A new configuration using PWM current source converters in low-voltage turbine-based wind energy conversion systems. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 919–929. [Google Scholar] [CrossRef]
- Tsili, M.; Papathanassiou, S. A review of grid code technical requirements for wind farms. IET Renew. Power Gener. 2009, 3, 308–332. [Google Scholar] [CrossRef]
- Shao, H.; Cai, X.; Li, Z. Stability enhancement and direct speed control of the DFIG inertia emulation control strategy. IEEE Access 2019, 7, 120089–120105. [Google Scholar] [CrossRef]
- Zeng, C. Research on Low Voltage Ride through of Doubly Fed Wind Turbine Based on PSCAD/EMTDC. Master’s Thesis, Kunming University of Science and Technology, Kunming, China, 2014. [Google Scholar]
- Abbey, C.; Li, W.; Owatta, L.; Joos, G. Power electronic converter control techniques for improved low voltage ride through performance in WTGs. In Proceedings of the IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006. [Google Scholar]
- Huang, Q.; Sun, M.; Zou, X.; Tong, L.; Xiong, W.; Chen, J. A reverse current tracking based LVRT strategy for doubly fed induction generator (DFIG). In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Australia, 10–13 November 2013. [Google Scholar]
- Jiang, H.; Zhang, C.; Zhou, T.; Zhang, Y.; Zhang, F. An adaptive control strategy of crowbar for the low voltage ride-through capability enhancement of the DFIG. Energy Procedia 2019, 158, 601–606. [Google Scholar] [CrossRef]
- Dolu, M. Crowbar hardware design enhancement for fault ride through capability in doubly fed induction generator-based wind turbines. ISA Trans. 2020, 104, 321–328. [Google Scholar]
- Gholizadeh, M.; Tohidi, S.; Oraee, A.; Oraee, H. Appropriate crowbar protection for improvement of brushless DFIG LVRT during asymmetrical voltage dips. Int. J. Electr. Power Energy Syst. 2018, 95, 1–10. [Google Scholar] [CrossRef]
- Wang, M.; Xu, W.; Jia, H.; Yu, X. A new method for DFIG fault ride through using resistance and capacity crowbar circuit. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013. [Google Scholar]
- Naderi, S.B.; Negnevitsky, M.; Jalilian, A.; Tarafdar, M.; Muttaqi, K.M. Optimum resistive type fault current limiter: An efficient solution to achieve maximum fault ride-through capability of fixed-speed wind turbines during symmetrical and asymmetrical grid faults. IEEE Trans. Ind. Appl. 2017, 53, 538–548. [Google Scholar] [CrossRef]
- Firouzi, M.; Gharehpetian, G.B. Improving fault ride-through capability of fixed-speed wind turbine by using bridge-type fault current limiter. IEEE Trans. Energy Convers. 2013, 28, 361–369. [Google Scholar] [CrossRef]
- Fereidouni, A.R.; Vahidi, B.; Hosseini, T. The impact of solid state fault current limiter on power network with wind-turbine power generation. IEEE Trans. Smart Grid 2013, 4, 1188–1196. [Google Scholar] [CrossRef]
- Guo, W. Development of a 1-mva/1-mj superconducting fault current limiter–magnetic energy storage system for LVRT capability enhancement and wind power smoothing. IEEE Trans. Appl. Supercond. 2018, 28, 1–5. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Z.; Ostergaard, J.; Dong, Z.Y.; Wong, K.P. Advanced control strategy of the DFIG wind turbines for power system fault ride through. IEEE Trans. Power Syst. 2012, 27, 713–722. [Google Scholar] [CrossRef]
- Bourdoulis, M.K.; Alexandridis, A.T. Dynamic analysis of PI controllers applied on AC/DC grid-side converters used in wind power generation. In Proceedings of the IET Conference on Renewable Power Generation, Edinburgh, UK, 6–8 September 2011. [Google Scholar]
- Lyu, M.; Hong, L.; Xu, Q.; Liao, W.; Wu, G.; Huang, S.; Peng, Y. Analysis and design of PI plus repetitive control for grid-side converters of direct-drive wind power systems considering the effect of hardware sampling circuits. IEEE Access 2020, 8, 87947–87959. [Google Scholar] [CrossRef]
- Firouzi, M.; Nasiri, M.; Mobayen, S.; Gharehpetian, G. Sliding mode controller-based BFCL for fault ride-through performance enhancement of the DFIG-based wind turbines. Complexity 2020, 2020. [Google Scholar] [CrossRef]
- Shanoob, M.; Iqbal, K. State feedback sliding mode control law design for grid-connected wind turbine model. In Proceedings of the 2019 IEEE 7th International Conference on Smart Energy Grid Engineering (SEGE), Oshawa, ON, Canada, 12–14 August 2019. [Google Scholar]
- Colombo, L.; Corradini, M.; Ippoliti, G.; Orlando, G. Pitch angle control of a wind turbine operating above the rated wind speed: A sliding mode control approach. ISA Trans. 2020, 96, 95–102. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, A.; Deng, Y.; Adeel, S.; Muhammad, A.; Kashif, M. Efficacious pitch angle control of variable-speed wind turbine using fuzzy based predictive controller. Energy Rep. 2020, 6, 423–427. [Google Scholar] [CrossRef]
- Zhao, H. The research of zero voltage ride through strategy of the DFIG. In Proceedings of the IET International Conference on Renewable Power Generation (RPG 2016), London, UK, 21–23 September 2016. [Google Scholar]
- Zhao, H.; Tang, H.; Zhang, W.; Wen, W.L. Transient characteristics research and integrated control strategy of the DFIG for zero voltage ride through. Power Syst. Technol. 2016, 40, 1422–1430. [Google Scholar]
- Tang, H.; Chang, Y.; Chi, Y.; Wang, B.; Li, Y.; Hu, J. Analysis and control of doubly fed induction generator for zero voltage ride through. In Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Cai, E.; Yan, Y.; Dong, L.; Liao, X. A control scheme with the variable-speed pitch system for wind turbines during a zero-voltage ride through. Energies 2020, 13, 3344. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, K.; Wang, S.; Kang, Z. Research on Zero-Voltage Ride Through Control Strategy of Doubly Fed Wind Turbine. Energies 2021, 14, 2287. https://doi.org/10.3390/en14082287
Qin K, Wang S, Kang Z. Research on Zero-Voltage Ride Through Control Strategy of Doubly Fed Wind Turbine. Energies. 2021; 14(8):2287. https://doi.org/10.3390/en14082287
Chicago/Turabian StyleQin, Kaina, Shanshan Wang, and Zhongjian Kang. 2021. "Research on Zero-Voltage Ride Through Control Strategy of Doubly Fed Wind Turbine" Energies 14, no. 8: 2287. https://doi.org/10.3390/en14082287
APA StyleQin, K., Wang, S., & Kang, Z. (2021). Research on Zero-Voltage Ride Through Control Strategy of Doubly Fed Wind Turbine. Energies, 14(8), 2287. https://doi.org/10.3390/en14082287