
A Novel Adaptive Function—Dual Kalman Filtering Strategy for Online Battery Model Parameters and State of Charge Co-Estimation



Abstract
1. Introduction
1.1. Motivation and Challenges
1.2. Literature Review
1.3. Contributions
1.4. Paper Organization
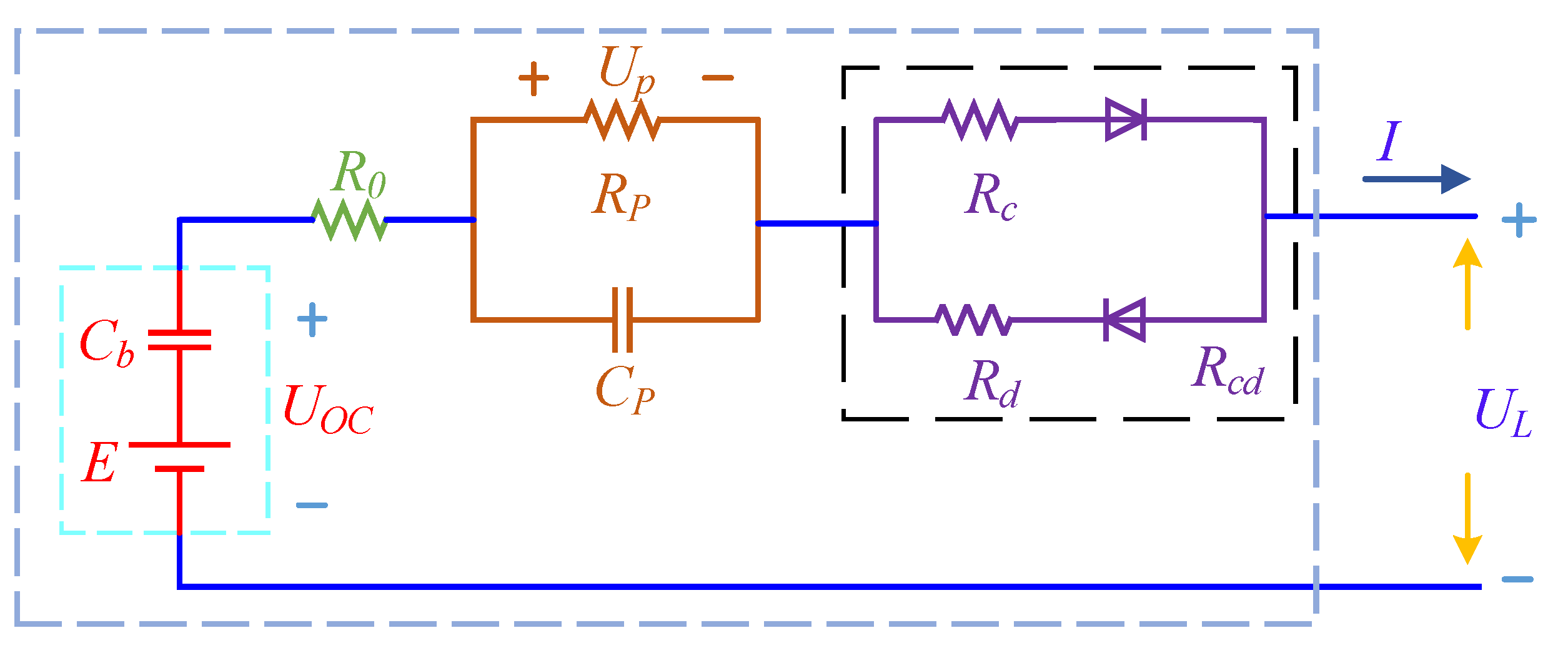
2. Circuit Modeling
2.1. Equivalent Model
2.2. State Space Description
2.3. Online Identification Based on FFRLS Algorithm
- Step 1
- According to the state equation of the model, the first order backward difference is used to obtain the discretized identification system seen in Equation (8).
- Step 2
- Calculate U(k):
- Step 3
- Assume the form of the autoregressive Equation (10) for the system:
- Step 4
- The coefficient matrix factorization is:
- Step 5
- The discrete parameter vector is:
3. SOC Estimation
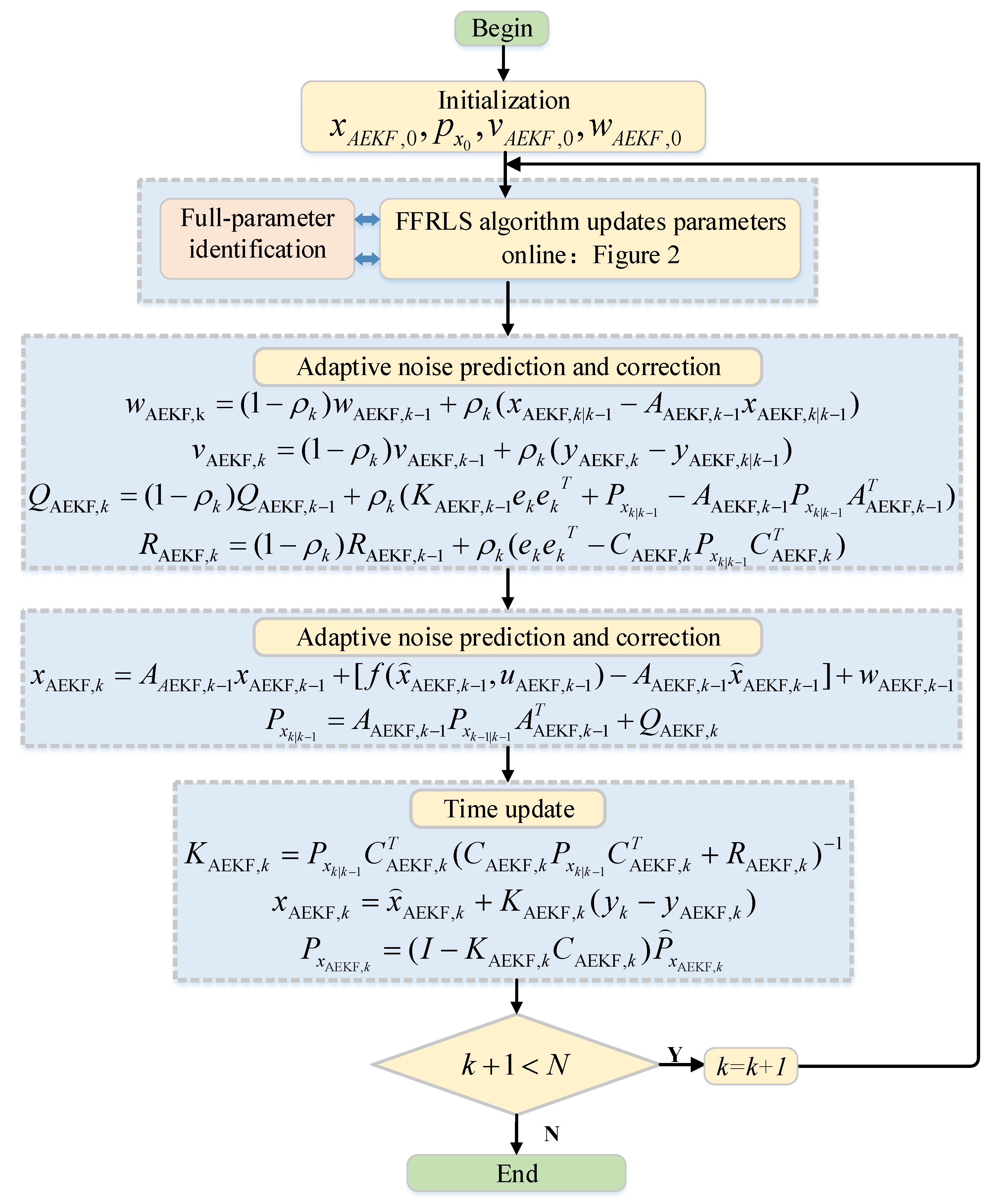
3.1. SOC Estimation Based on AEKF
- (1)
- Update system noise and its covariance:
- (2)
- Update observation noise and its covariance:
- (3)
- Conduct an iterative calculation of ek and ρk:
3.2. SOC Estimation Based on F-UKF
3.3. Joint Estimation Algorithm
- (1)
- Conduct a static discharge experiment for the battery to obtain the expression showing the relationship between the OCV and the SOC.
- (2)
- Use the AEKF algorithm to estimate the SOCAEKF,k of the current battery based on the IR-PCM and state space formula created in Figure 1.
- (3)
- Judge whether the iterative step size is greater than the set value T. If it is, proceed to the next step.
- (4)
- Add a transfer function to conduct benign interference with the SOC value obtained through the AEKF algorithm. A new SOC value is obtained and recorded as SOCTF,k. SOCTF,k is used as the initial value for the F-UKF algorithm. The transfer function is shown in Equation (24).
- (5)
- Use F-UKF to estimate SOC again. Use the F-UKF algorithm to estimate SOCF-UEKF,k of the current battery. At the same time, the system continues to use the AEKF algorithm to estimate the current SOC value.
- (6)
- Judge whether the SOC estimation value obtained through F-UKF is normal. That is, if , proceed to the next step.
- (7)
- Implement weighted mutation for the estimation results of both AEKF and F-UKF to obtain the corrected SOCAF-DKF,k value, the mutation formula is shown in Equation (25).
- (8)
- Judge whether the SOC estimation value obtained through AF-DKF is normal. That is, if , proceed to the next step. If , judge the values of and , and determine the final value of the current SOC accordingly.
- (9)
- Use the FFRLS algorithm to perform online parameter identification and update the related matrix in the system state formula to prepare for the next iteration, based on the SOCAF-DKF value and the relationship between OCV and SOC.
4. Experiment Analysis
4.1. Experimental Platform
- Step 1
- Fully charge the LiB samples.
- Step 2
- Discharge the LiB samples to an SOC of 0.9 with 1 C current and let it stand for 40 min, use a high-precision internal resistance measuring instrument to measure the internal resistance of the LiB samples and record it.
- Step 3
- Discharge the battery again for another six minutes with a current of 1 C to reduce the LiB samples SOC to 0.8. Let it stand for 40 min.
- Step 4
- Repeat step 2 until the battery SOC drops to 0.1.
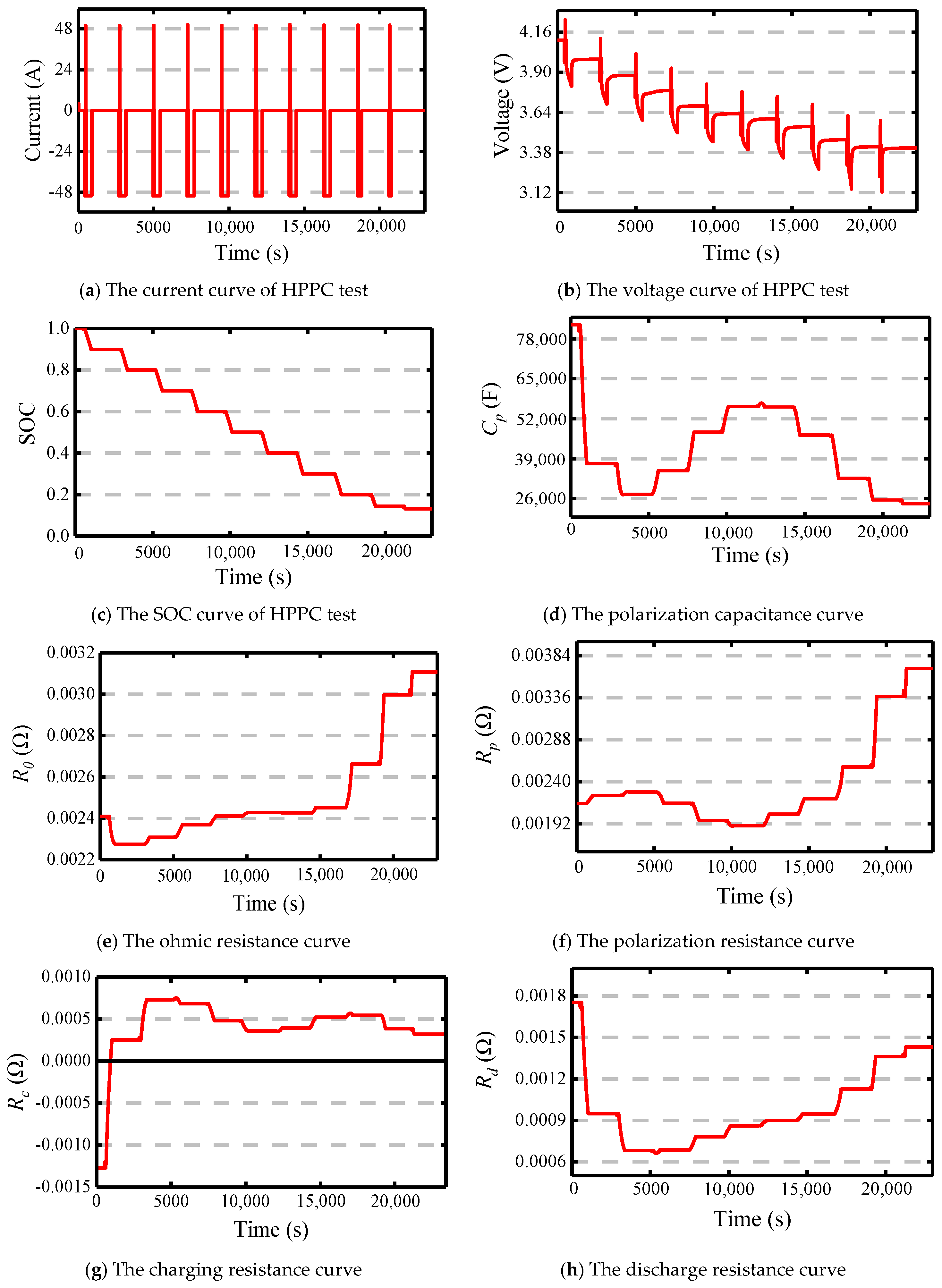
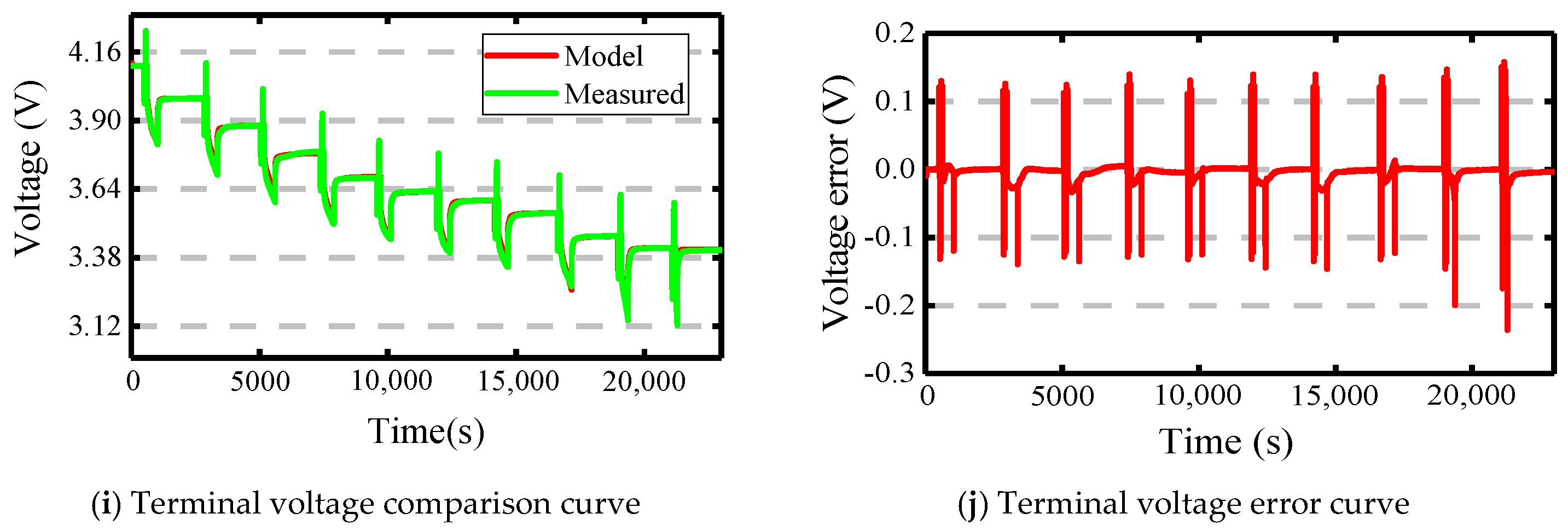
4.2. Modeling Verification
4.3. BBDST Working Condition Experimental Verification
- (1)
- With violent changes of the operating current, the errors of the three algorithms remain within 0.4% when the SOC value is between 0.9 and 1 and converge in a relatively proper manner on the theoretical SOC value.
- (2)
- With the further progress the BDDST working condition, the error of the AEKF algorithm starts to increase, with a maximum of 0.8%, when the SOC value is between 0.8 and 0.9, while those of F-UKF and AF-DKF are still within 0.4% and can still converge in a relatively proper manner on the theoretical SOC value. Besides, the value of AF-DKF is smaller than that of F-UKF. Due to the Taylor truncation error of the AEKF algorithm, the error of the algorithm increases in the later stage of the SOC estimation, and even leads to the divergence of the filtering. The iterative results of F-UKF algorithm and AF-DKF algorithm are globally optimal, and the possibility of filtering divergence is greatly reduced.
- (3)
- When SOC reduces to less than 0.8, the situation is as follows: the error of AEKF increases obviously, with a maximum of over 1.5%. With the progress of the experiment, there is a possibility of divergence for AEKF, indicating that it has relatively poor robustness. For F-UKF and AF-DKF, the SOC estimation fluctuates, with the maximum error of F-UKF increasing to 0.5% and that of AF-DKF still within 0.4%.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Notation | |
| I | loop current |
| UL | terminal voltage |
| E | ideal voltage source |
| Uoc | open circuit voltage |
| Rp | polarization resistance |
| Cp | polarization capacitance |
| Rcd | internal resistance |
| ε1 | Coulomb efficiency |
| ε2 | temperature influence coefficient |
| QN | battery capacity |
| θ | coefficient vector |
| φ | data vector |
| ζ | parameter matrix |
| λ | forgetting factor |
| η | gain matrix of FFRLS |
| Rn | mixed resistance value |
| wk | process noise |
| vk | observation noise |
| KAEKF,k | gain matrix of AEKF |
| forgetting factor of AEKF | |
| innovation of AEKF | |
| set value for the maximum current change | |
| sampling time interval | |
| weight factor of F-UKF | |
| KF-UKF,k | gain matrix of F-UKF |
| ϕ | dynamic function |
| SOCTF,k | initial SOC value of F-UKF |
| SOCAEKF,k | estimate of SOC under AEKF |
| SOCF-UKF,k | estimate of SOC under F-UKF |
| SOCAF-DKF,k | estimate of SOC under AF-DKF |
| h(x) | random number following normal distribution |
| weight factors of AF-DKF | |
| Acronyms & abbreviations | |
| EVs | electric vehicles |
| BMS | battery management system |
| SOC | State-of-charge |
| EKF | extended Kalman filter |
| PF | particle filter |
| AI | artificial intelligence |
| RC | resistance-capacitance |
| UKF | unscented Kalman filter |
| SOH | state-of-health |
| RLS | recursive least square |
| FFRLS | forgetting factor recursive least square |
| AEKF | adaptive extended Kalman filter |
| F-UKF | function—unscented Kalman filter |
| AF-DKF | adaptive function—dual Kalman filter |
| BBDST | Beijing bus dynamic stress test |
| OCV | open circuit voltage |
| SISO | single-input single-output |
| ARMA | autoregressive moving average |
References
- Hu, X.S.; Zou, C.F.; Zhang, C.P.; Li, Y. Technological developments in batteries: A survey of principal roles, types, and management needs. IEEE Power Energy Mag. 2017, 15, 20–31. [Google Scholar] [CrossRef]
- Ouyang, M.G.; Du, J.Y.; Peng, H.E.; Wang, H.W.; Feng, X.N.; Song, Z.Y. Progress review of US-China joint research on advanced technologies for plug-in electric vehicles. Sci. China Technol. Sci. 2018, 61, 1431–1445. [Google Scholar] [CrossRef]
- Wei, Z.B.; Zhao, J.Y.; Zou, C.F.; Lim, T.M.; Tseng, K.J. Comparative study of methods for integrated model identification and state of charge estimation of lithium-ion battery. J. Power Sources 2018, 402, 189–197. [Google Scholar] [CrossRef]
- Wang, S.L.; Fernandez, C.; Liu, X.H.; Su, J.; Xie, Y.X. The parameter identification method study of the splice equivalent circuit model for the aerial lithium-ion battery pack. Meas. Control 2018, 51, 125–137. [Google Scholar] [CrossRef]
- Stübler, T.; Lahyani, A.; Zayoud, A.A. Lithium-ion battery modeling using CC–CV and impedance spectroscopy characterizations. SN Appl. Sci. 2020, 2, 1–8. [Google Scholar] [CrossRef]
- Couto, L.D.; Schorsch, J.; Job, N.; Leonard, A.; Kinnaert, M. State of health estimation for lithium ion batteries based on an equivalent-hydraulic model: An iron phosphate application. J. Energy Storage 2019, 21, 259–271. [Google Scholar] [CrossRef]
- Barai, A.; Uddin, K.; Widanage, W.D.; McGordon, A.; Jennings, P. A study of the influence of measurement timescale on internal resistance characterisation methodologies for lithium-ion cells. Sci Rep. UK 2018, 8, 21. [Google Scholar] [CrossRef]
- Yang, J.F.; Xia, B.; Shang, Y.L.; Huang, W.X.; Mi, C.C. Adaptive state-of-charge estimation based on a split battery model for electric vehicle applications. IEEE Trans. Veh. Technol. 2017, 66, 10889–10898. [Google Scholar] [CrossRef]
- Mesbahi, T.; Rizoug, N.; Bartholomeus, P.; Sadoun, R.; Khenfri, F.; Le Moigne, P. Dynamic model of li-ion batteries incorporating electrothermal and ageing aspects for electric vehicle applications. IEEE Trans. Ind. Electron. 2018, 65, 1298–1305. [Google Scholar] [CrossRef]
- Ma, Y.; Duan, P.; Sun, Y.S.; Chen, H. Equalization of Lithium-ion Battery Pack based on Fuzzy Logic Control in Electric Vehicle. IEEE Trans. Ind. Electron. 2018, 65, 6762–6771. [Google Scholar] [CrossRef]
- Wang, S.L.; Shang, L.P.; Li, Z.F.; Deng, H.; Li, J.C. Online dynamic equalization adjustment of high-power lithium-ion battery packs based on the state of balance estimation. Appl. Energy 2016, 166, 44–58. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Zhang, L.Z.; Hu, L.; Huang, C.X. Active cell balancing of lithium-ion battery pack based on average state of charge. Int. J. Energy Res. 2020, 44, 2535–2548. [Google Scholar] [CrossRef]
- Mathew, M.; Janhunen, S.; Rashid, M.; Long, F.; Fowler, M. Comparative analysis of lithium-ion battery resistance estimation techniques for battery management systems. Energies 2018, 11, 1490. [Google Scholar] [CrossRef]
- Lee, C.; Said, A.O.; Stoliarov, S.I. Impact of state of charge and cell arrangement on thermal runaway propagation in lithium-ion battery cell arrays. Transp. Res. Rec. 2019, 2673, 408–417. [Google Scholar] [CrossRef]
- Han, X.B.; Ouyang, M.G.; Lu, L.G.; Li, J.Q. Simplification of physics-based electrochemical model for lithium-ion battery on electric vehicle. Part II: Pseudo-two-dimensional model simplification and state of charge estimation. J. Power Sources 2015, 278, 814–825. [Google Scholar] [CrossRef]
- Lee, K.T.; Dai, M.J.; Chuang, C.C. Temperature-Compensated Model for Lithium-Ion Polymer Batteries with Extended Kalman Filter State-of-Charge Estimation for an Implantable Charger. IEEE Trans. Ind. Electron. 2018, 65, 589–596. [Google Scholar] [CrossRef]
- Xu, Y.D.; Hu, M.H.; Zhou, A.J.; Li, Y.X.; Li, S.X.; Fu, C.Y.; Gong, C.C. State of charge estimation for lithium-ion batteries based on adaptive dual Kalman filter. Appl. Math. Modell. 2020, 77, 1255–1272. [Google Scholar] [CrossRef]
- Shen, P.; Ouyang, M.G.; Lu, L.G.; Li, J.Q.; Feng, X.N. The co-estimation of state of charge, state of health, and state of function for lithium-ion batteries in electric vehicles. IEEE Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]
- Chen, X.K.; Lei, H.; Xiong, R.; Shen, W.X.; Yang, R.X. A novel approach to reconstruct open circuit voltage for state of charge estimation of lithium ion batteries in electric vehicles. Appl. Energy 2019, 255, 113758. [Google Scholar] [CrossRef]
- Luo, M.J.; Guo, Y.Z.; Kang, J.Q.; She, L.Y.; Geng, Z.C. Ternary-material lithium-ion battery SOC estimation under various ambient temperature. Ionics 2018, 24, 1907–1917. [Google Scholar] [CrossRef]
- Zhang, Z.L.; Cheng, X.; Lu, Z.Y.; Gu, D.J. SOC estimation of lithium-ion battery pack considering balancing current. IEEE Trans. Power Electron. 2018, 33, 2216–2226. [Google Scholar] [CrossRef]
- Wang, S.L.; Fernandez, C.; Chen, M.J.; Wang, L.; Su, J. A novel safety anticipation estimation method for the aerial lithium-ion battery pack based on the real-time detection and filtering. J. Cleaner Prod. 2018, 185, 187–197. [Google Scholar] [CrossRef]
- Wang, Y.J.; Zhang, C.B.; Chen, Z.H. A method for state-of-charge estimation of LiFePO4 batteries at dynamic currents and temperatures using particle filter. J. Power Sources 2015, 279, 306–311. [Google Scholar] [CrossRef]
- Liu, S.Q.; Xu, D.P.; Ma, T.Y.; Wei, Z.; Lin, C.J.; Bai, G.L.; Gao, X.L.; Shen, J.J.; Huang, W.L.; Wang, F.; et al. Thermal safety studies of high energy density lithium-ion batteries under different states of charge. Int. J. Energy Res. 2020, 44, 1535–1545. [Google Scholar] [CrossRef]
- Afshari, H.H.; Attari, M.; Ahmed, R.; Delbari, A.; Habibi, S.; Shoa, T. Reliable state of charge and state of health estimation using the smooth variable structure filter. Control Eng. Pract. 2018, 77, 1–14. [Google Scholar] [CrossRef]
- Wang, W.D.; Wang, X.T.; Xiang, C.L.; Wei, C.; Zhao, Y.L. Unscented Kalman Filter-Based Battery SOC Estimation and Peak Power Prediction Method for Power Distribution of Hybrid Electric Vehicles. IEEE Access 2018, 6, 35957–35965. [Google Scholar] [CrossRef]
- Tian, J.P.; Xiong, R.; Yu, Q.Q. Fractional-Order Model-Based Incremental Capacity Analysis for Degradation State Recognition of Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2019, 66, 1576–1584. [Google Scholar] [CrossRef]
- Kim, M.; Kim, K.; Kim, J.; Han, S. State of Charge Estimation for Lithium-ion battery Based on Reinforcement Learning. IFA Pap. OnLine 2018, 51, 404–408. [Google Scholar] [CrossRef]
- Li, H.H.; Zhang, W.; Yang, X.R.; Jiang, H.B.; Wang, Y.P.; Yang, T.; Chen, L.; Shen, H.P. State of charge estimation for lithium-ion battery using an electrochemical model based on electrical double layer effect. Electrochim. Acta 2019, 326, 134966. [Google Scholar] [CrossRef]
- Stenzel, Y.P.; Borner, M.; Preibisch, Y.; Winter, M.; Nowak, S. Thermal profiling of lithium-ion battery electrodes at different states of charge and aging conditions. J. Power Sources 2019, 433, 226709.1–226709.11. [Google Scholar] [CrossRef]
- Wang, Y.J.; Liu, C.; Pan, R.; Chen, Z.H. Modeling and state-of-charge prediction of lithium-ion battery and ultracapacitor hybrids with a co-estimator. Energy 2017, 121, 739–750. [Google Scholar] [CrossRef]
- Long, H.Y.; Zhu, C.Y.; Huang, B.B.; Sun, Y.Q. Model parameters online identifcation and SOC joint estimation for lithium-ion battery based on a composite algorithm. J. Electr. Eng. Technol. 2019, 14, 1485–1493. [Google Scholar] [CrossRef]
- Wang, Y.J.; Chen, Z.H. A framework for state-of-charge and remaining discharge time prediction using unscented particle filter. Appl. Energy 2020, 260, 114324. [Google Scholar] [CrossRef]
- Duan, W.X.; Song, C.X.; Chen, Y.; Xiao, F.; Peng, S.L.; Shao, Y.L.; Song, S.X. Online Parameter Identification and State of Charge Estimation of Battery Based on Multitimescale Adaptive Double Kalman Filter Algorithm. Math. Probl. Eng. 2020, 2020, 9502605. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SOC (%) | 1.0 | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | 0.4 | 0.3 | 0.2 | 0.1 |
|---|---|---|---|---|---|---|---|---|---|---|
| The charging resistance (mΩ) | 2.2344 | 2.5336 | 3.0396 | 3.0666 | 2.9143 | 2.7885 | 2.8026 | 2.9774 | 3.2390 | 3.3854 |
| The discharge resistance (mΩ) | 4.1810 | 3.2314 | 2.9902 | 3.0702 | 3.2131 | 3.2917 | 3.3086 | 3.3975 | 3.8220 | 4.4957 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Y.; Shi, H.; Wang, S.; Fernandez, C.; Cao, W.; Huang, J. A Novel Adaptive Function—Dual Kalman Filtering Strategy for Online Battery Model Parameters and State of Charge Co-Estimation. Energies 2021, 14, 2268. https://doi.org/10.3390/en14082268
Fan Y, Shi H, Wang S, Fernandez C, Cao W, Huang J. A Novel Adaptive Function—Dual Kalman Filtering Strategy for Online Battery Model Parameters and State of Charge Co-Estimation. Energies. 2021; 14(8):2268. https://doi.org/10.3390/en14082268
Chicago/Turabian StyleFan, Yongcun, Haotian Shi, Shunli Wang, Carlos Fernandez, Wen Cao, and Junhan Huang. 2021. "A Novel Adaptive Function—Dual Kalman Filtering Strategy for Online Battery Model Parameters and State of Charge Co-Estimation" Energies 14, no. 8: 2268. https://doi.org/10.3390/en14082268
APA StyleFan, Y., Shi, H., Wang, S., Fernandez, C., Cao, W., & Huang, J. (2021). A Novel Adaptive Function—Dual Kalman Filtering Strategy for Online Battery Model Parameters and State of Charge Co-Estimation. Energies, 14(8), 2268. https://doi.org/10.3390/en14082268