
Enhanced Model Reference Adaptive Control Scheme for Tracking Control of Magnetic Levitation System

 ,
, 

 ,
, 
Abstract
:1. Introduction
1.1. Theoretical Introduction
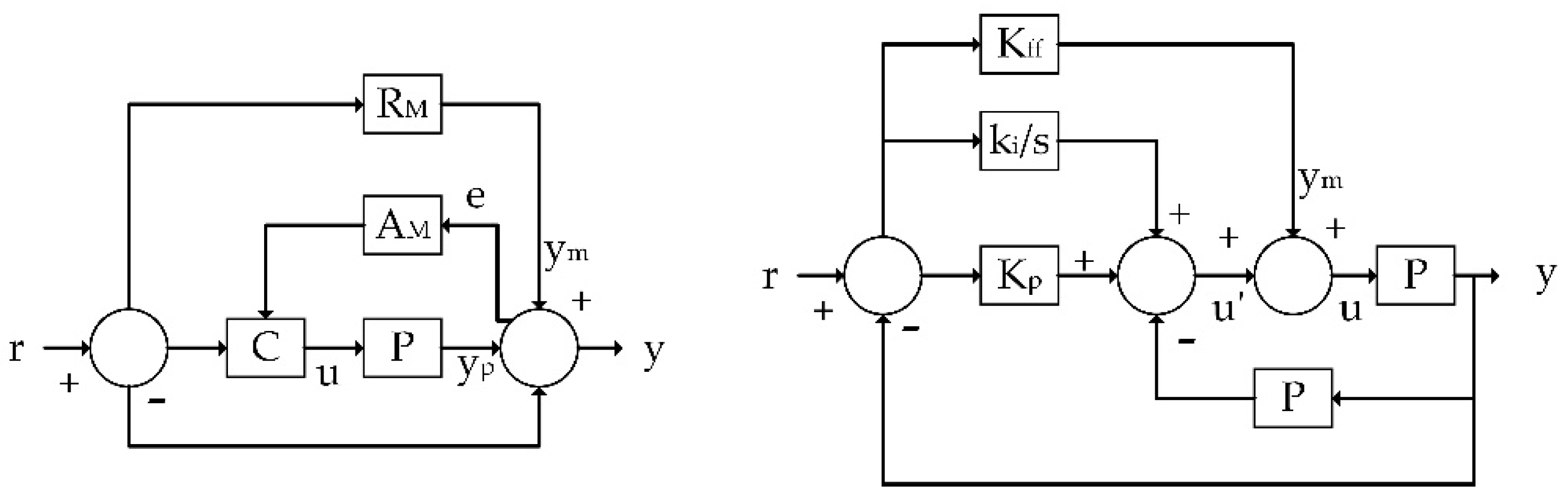
1.2. Proportional Integral Velocity Plus—Feed Forward Scheme (PIV-FF)
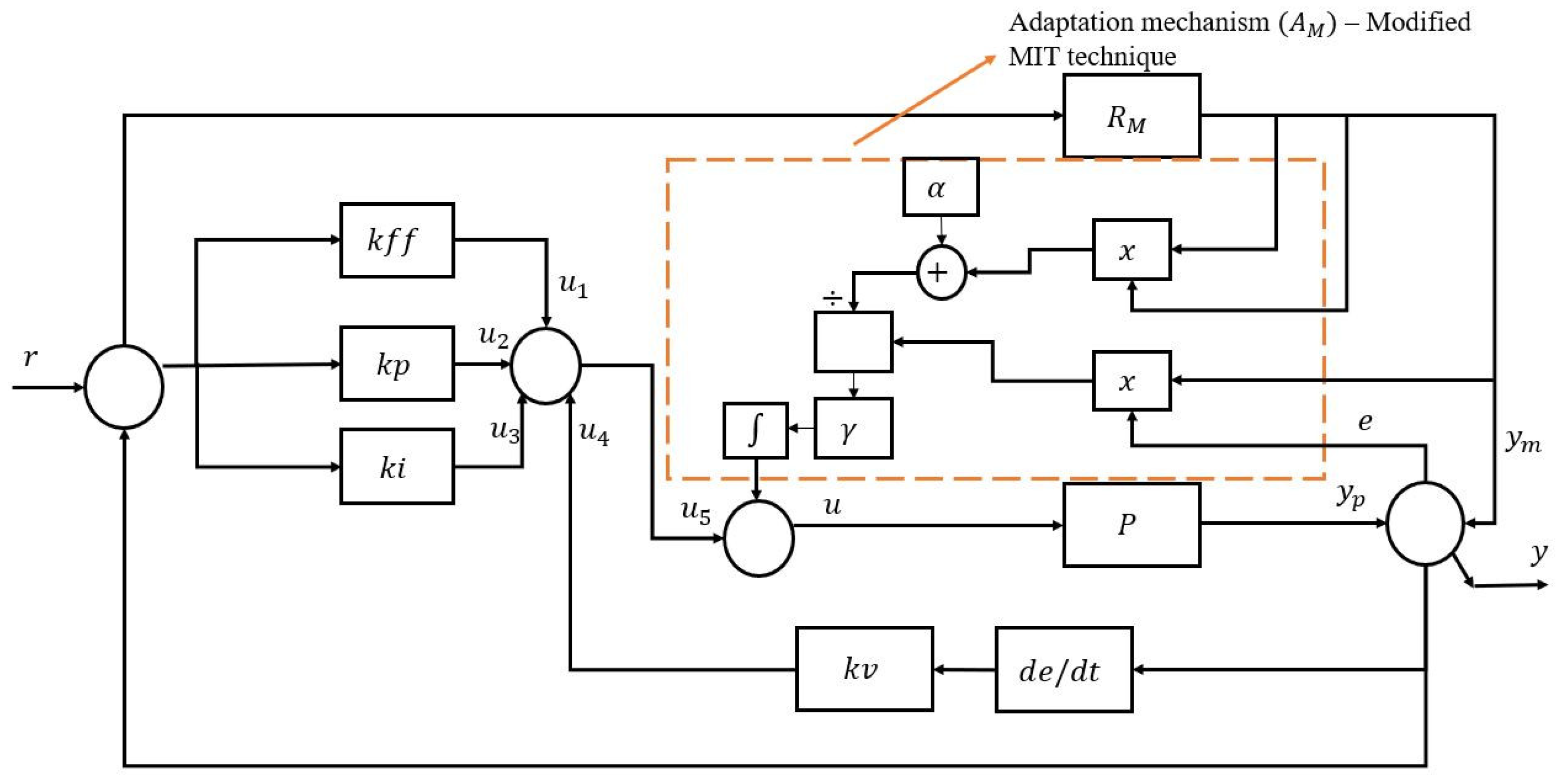
1.3. Enhanced MRAC Scheme
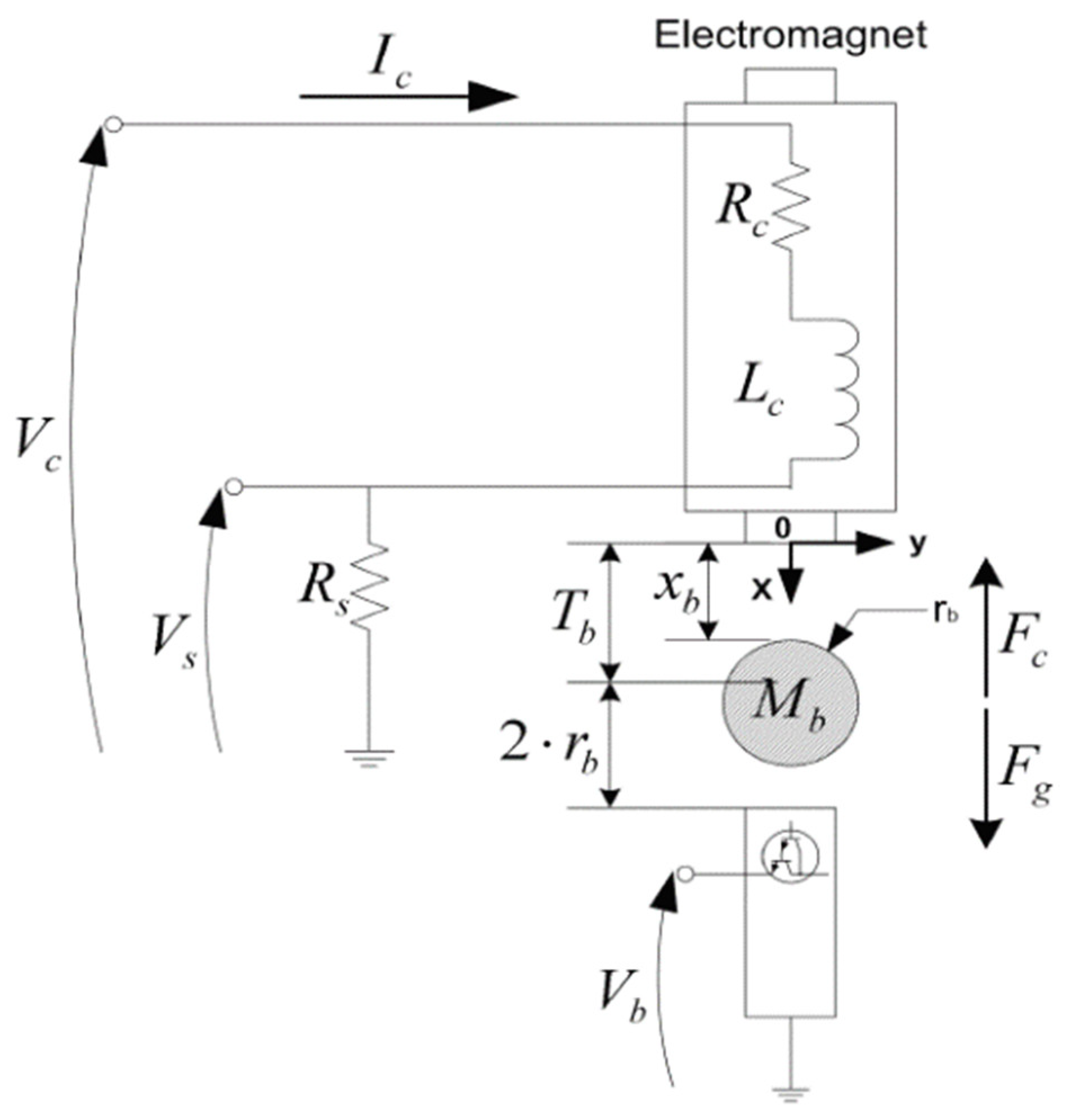
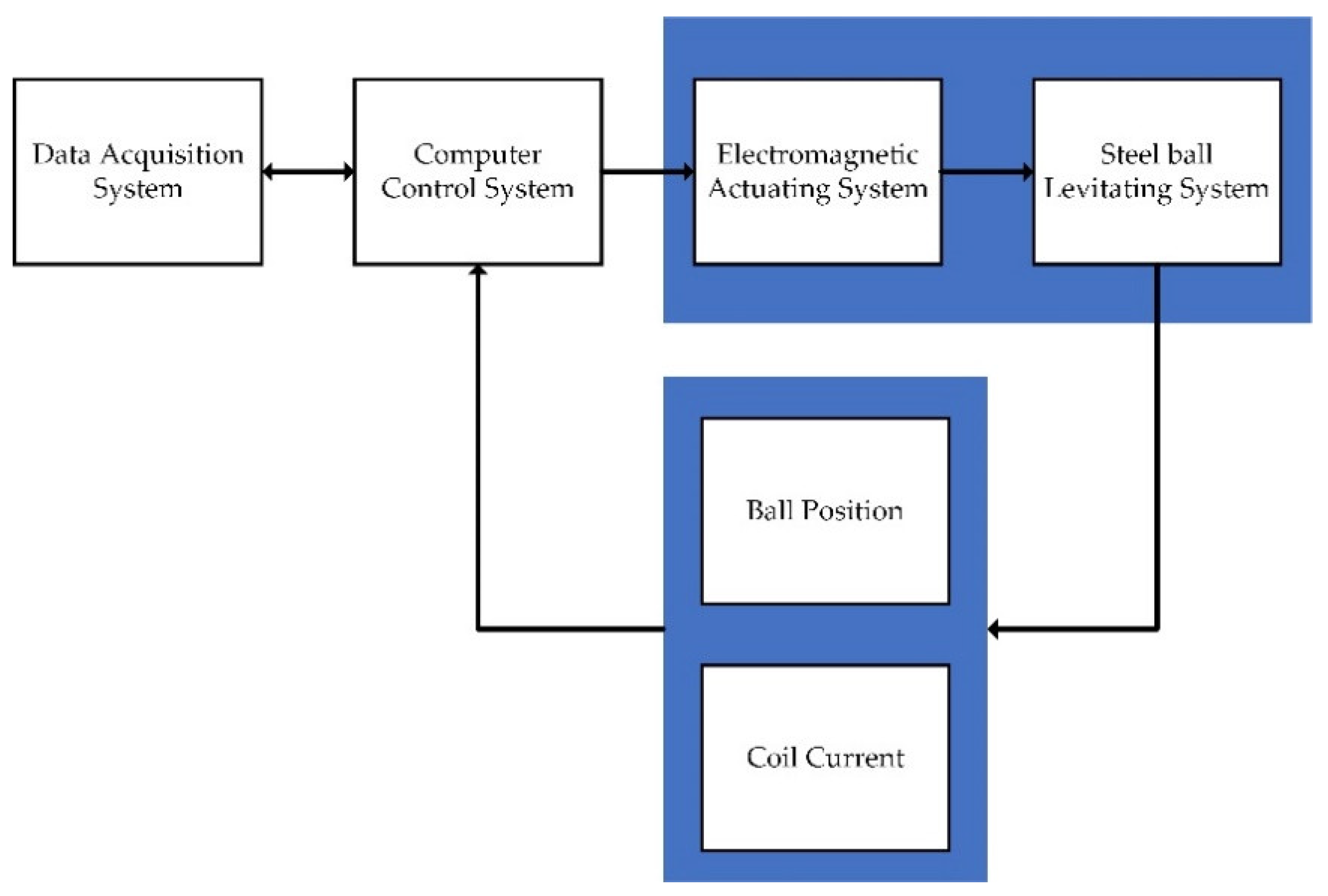
1.4. Mathematical Modeling of the Maglev System
1.4.1. Equation for the Motion of the Ball
1.4.2. Controller Synthesis
2. Results
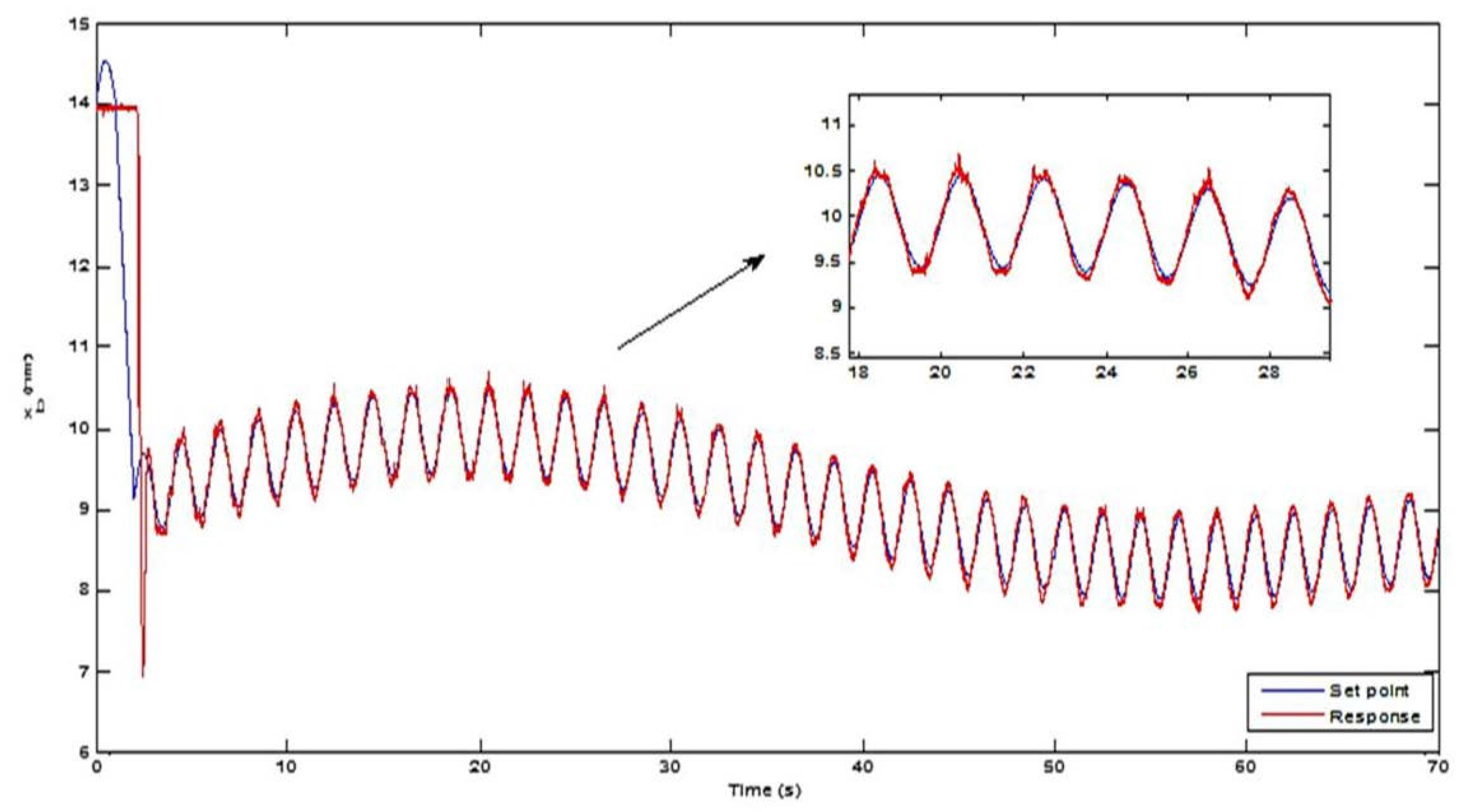
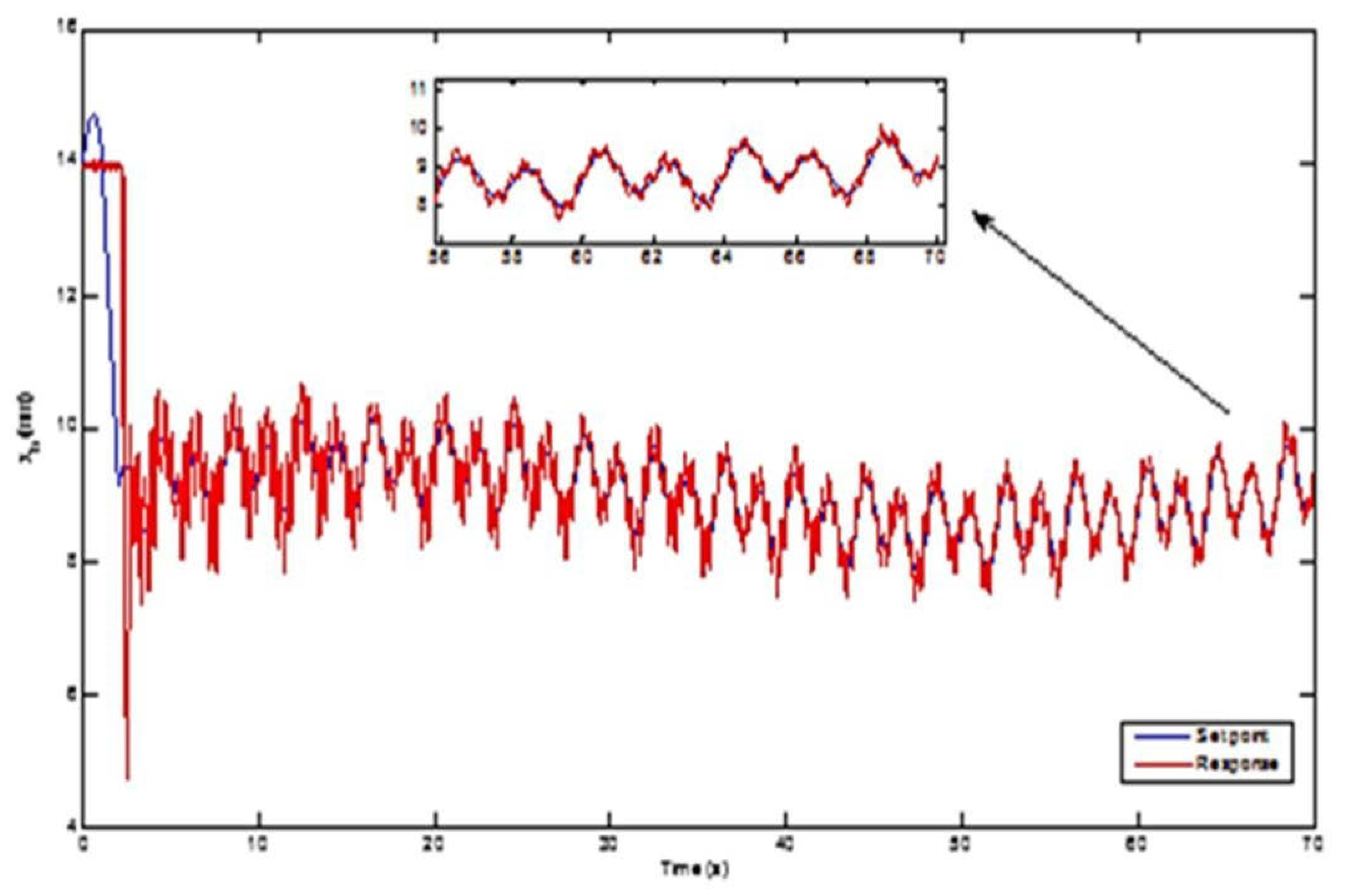
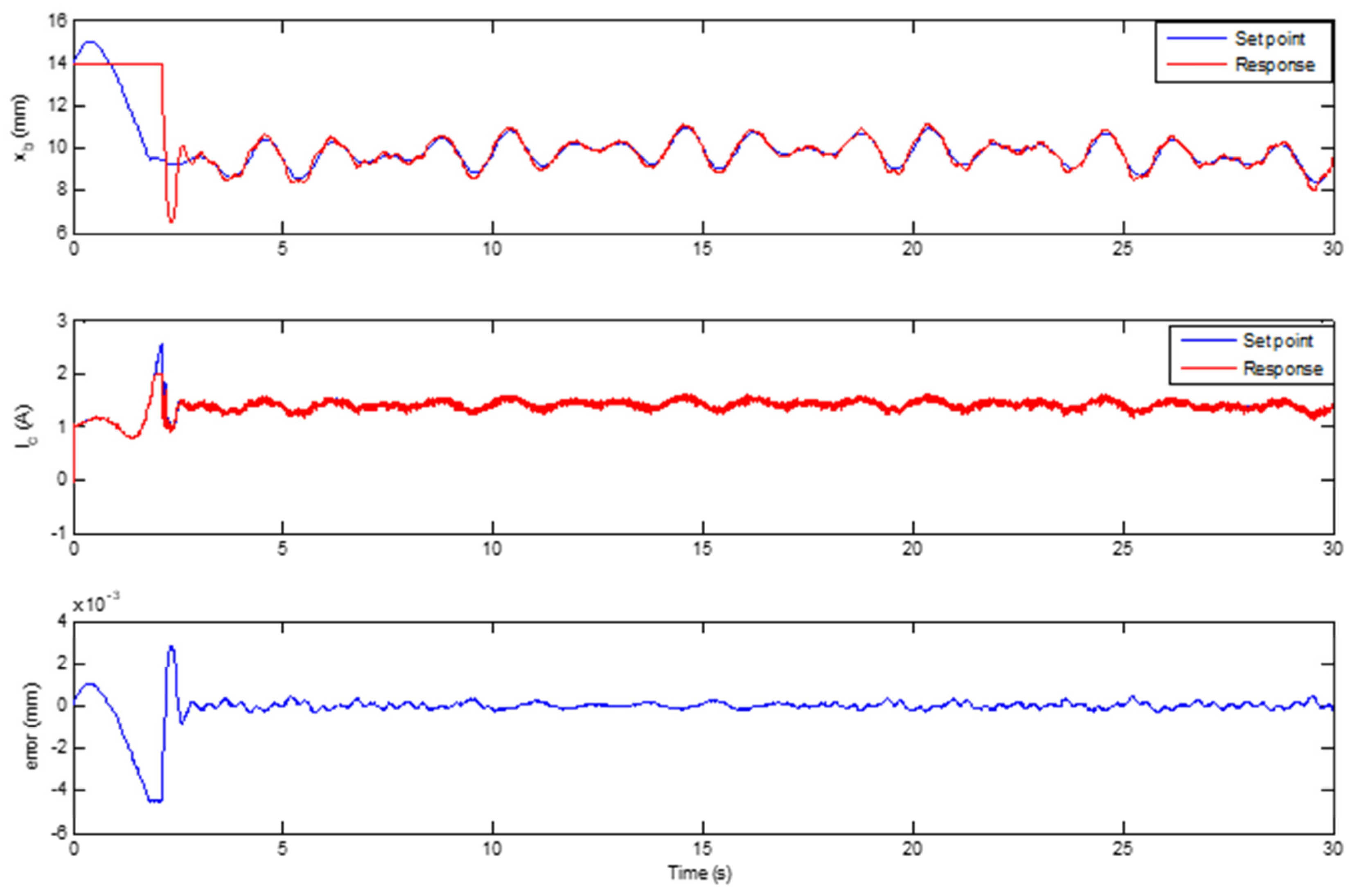
2.1. Multi-Sine Trajectory Tracking
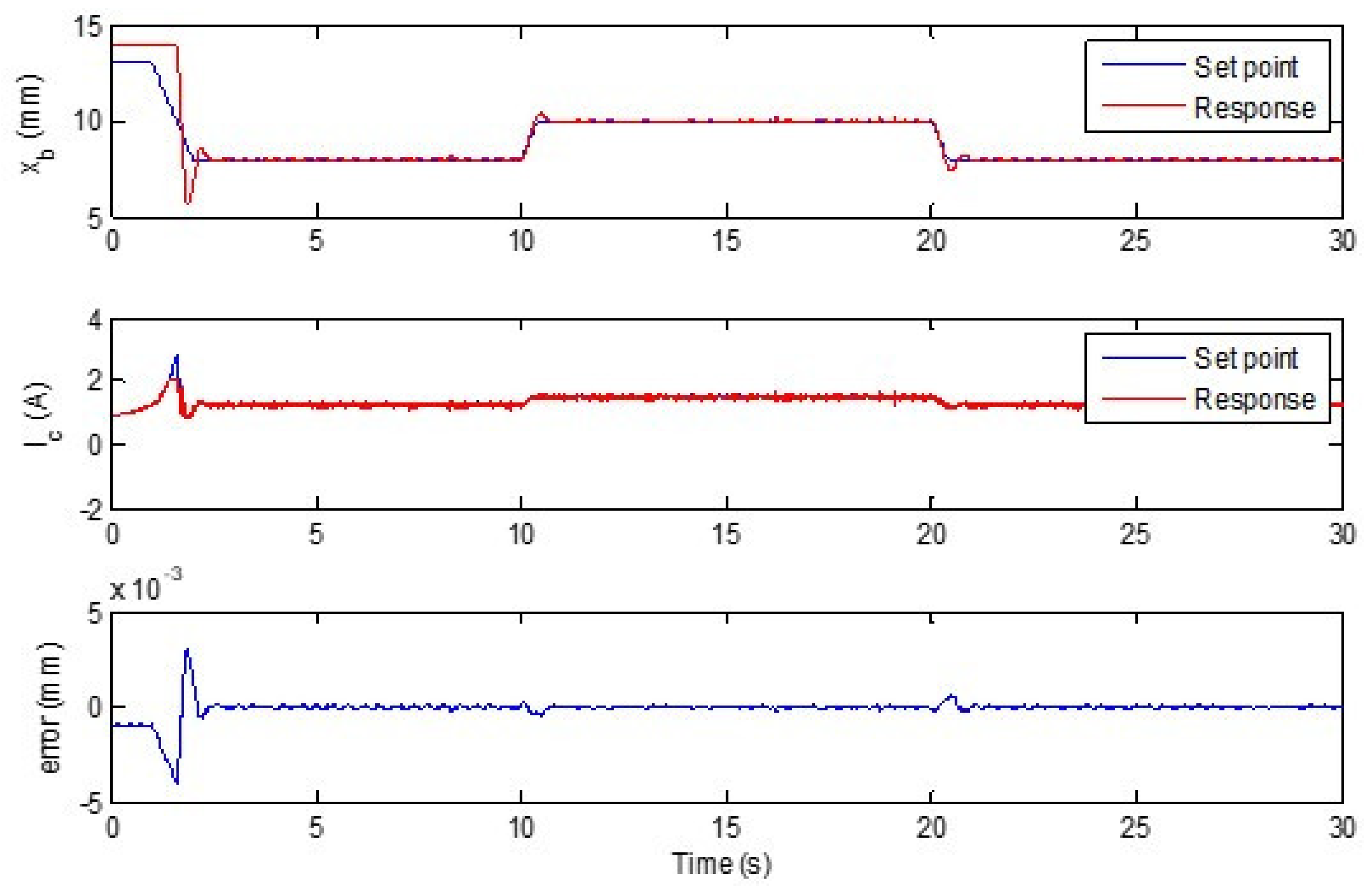
2.2. Symmetric Trajectory Tracking
3. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Charara, A.; De Miras, J.; Caron, B. Nonlinear control of a magnetic levitation system without premagnetization. IEEE Trans. Control. Syst. Technol. 1996, 4, 513–523. [Google Scholar] [CrossRef]
- Yaseen, M.H.; Abd, H.J. Modeling and control for a magnetic levitation system based on SIMLAB platform in real time. Results Phys. 2018, 8, 153–159. [Google Scholar] [CrossRef]
- Tuan, T.A.; Suzuki, S.; Sakamoto, N. Nonlinear optimal control design considering a class of system constraints with validation on a magnetic levitation system. IEEE Control Syst. Lett. 2017, 2, 418–423. [Google Scholar]
- Krzysztof, K.; Mitura, A.; Lenci, S.; Warminski, J. Energy harvesting from a magnetic levitation sys-tem. Int. J. Non-Linear Mech. 2017, 94, 200–206. [Google Scholar]
- Kim, S.-K.; Ahn, C.K. Variable Cut-Off Frequency Algorithm-Based Nonlinear Position Controller for Magnetic Levitation System Applications. IEEE Trans. Syst. Man, Cybern. Syst. 2019, 1–7. [Google Scholar] [CrossRef]
- Chen, C.; Xu, J.; Ji, W.; Rong, L.; Lin, G. Sliding Mode Robust Adaptive Control of Maglev Vehicle’s Nonlinear Suspension System Based on Flexible Track: Design and Experiment. IEEE Access 2019, 7, 41874–41884. [Google Scholar] [CrossRef]
- Gao, Y.; Wang, Y.; Zhang, J.; Li, M.; Yue, Q.; Zhang, W. A sliding mode periodic adaptive learning operation control method for medium-speed maglev trains. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 5548–5553. [Google Scholar]
- Kim, C.-H. Robust Control of Magnetic Levitation Systems Considering Disturbance Force by LSM Propulsion Systems. IEEE Trans. Magn. 2017, 53, 1–5. [Google Scholar] [CrossRef]
- Yang, Z.; Pedersen, G. Automatic Tuning of PID Controller for a 1-D Levitation System Using a Genetic Algorithm—A Real Case Study. IEEE Int. Symp. Intell. Control 2006, 3098–3103. [Google Scholar] [CrossRef]
- Sivrioglu, S.; Basaran, S.; Yildiz, A.S. Multisurface HTS-PM Levitation for a Flywheel System. IEEE Trans. Appl. Supercond. 2016, 26, 1–6. [Google Scholar] [CrossRef]
- Rahul, S.G.; Dhivyasri, P.G.; Kavitha, S.; Arungalai, V.K.A.; Kumar, R.; Garg, A.; Gao, L. Model refer-ence adaptive controller for enhancing depth of penetration and bead width during cold metal transfer joining process. Ro-Botics Comput.-Integr. Manuf. 2018, 53, 122–134. [Google Scholar] [CrossRef]
- Garza, L.E.; Castanon, A. Vargas Martinez and R. Cruz Reynoso, “MRAC-based Fault Tolerant Control of a SISO Real Pro-cess Application. IEEE Lat. Am. Trans. 2015, 13, 2545–2550. [Google Scholar] [CrossRef]
- Espinoza, A.T.; Sanchez, W. On-board parameter learning using a model reference adaptive position and attitude con-troller. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 3–11 March 2017. [Google Scholar]
- Pawar, R.J.; Parvat, B. Design and implementation of MRAC and modified MRAC technique for inverted pendulum. In Proceedings of the 2015 International Conference on Pervasive Computing (ICPC), Pune, India, 8–10 January 2015; pp. 1–6. [Google Scholar]
- Balko, P.; Rosinova, D. Modeling of magnetic levitation system. In Proceedings of the 2017 21st International Conference on Process Control (PC), Štrbské Pleso, Slovakia, 6–9 June 2017; pp. 252–257. [Google Scholar]
- Deshan, K.; Dong, J.; Yanchao, Z.; Xukun, L.; Deyu, W. Research on rejection magnetic levitation model simulation and wavelet analysis of its signal. In Proceedings of the 2019 14th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Changsha, China, 1–3 November 2019; pp. 1701–1707. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value |
|---|---|---|
| Rc | Coil resistance | 10 Ω |
| Lc | Coil inductance | 412.5 mH |
| lc | Coil length | 0.0825 m |
| rc | Coil steel core radius | 0.008 m |
| Rs | Current sense resistance | 1 Ω |
| rb | The radius of the ball | 1.27 × 10−2 m |
| Mb | Mass of the ball | 0.068 kg |
| Tb | Ball travel | 0.014 m |
| G | Gravitational constant | 9.81 m/s2 |
| cmax | Maximum coil current | 3 A |
| Kb | Ball position sensor sensitivity | 2.83 × 10−3 m/V |
| Km | Electromagnet force constant | 6.53 × 10−5 N.m2/A2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gopi, R.S.; Srinivasan, S.; Panneerselvam, K.; Teekaraman, Y.; Kuppusamy, R.; Urooj, S. Enhanced Model Reference Adaptive Control Scheme for Tracking Control of Magnetic Levitation System. Energies 2021, 14, 1455. https://doi.org/10.3390/en14051455
Gopi RS, Srinivasan S, Panneerselvam K, Teekaraman Y, Kuppusamy R, Urooj S. Enhanced Model Reference Adaptive Control Scheme for Tracking Control of Magnetic Levitation System. Energies. 2021; 14(5):1455. https://doi.org/10.3390/en14051455
Chicago/Turabian StyleGopi, Rahul Sanmugam, Soundarya Srinivasan, Kavitha Panneerselvam, Yuvaraja Teekaraman, Ramya Kuppusamy, and Shabana Urooj. 2021. "Enhanced Model Reference Adaptive Control Scheme for Tracking Control of Magnetic Levitation System" Energies 14, no. 5: 1455. https://doi.org/10.3390/en14051455
APA StyleGopi, R. S., Srinivasan, S., Panneerselvam, K., Teekaraman, Y., Kuppusamy, R., & Urooj, S. (2021). Enhanced Model Reference Adaptive Control Scheme for Tracking Control of Magnetic Levitation System. Energies, 14(5), 1455. https://doi.org/10.3390/en14051455