
Coordinated Control of Virtual Power Plants to Improve Power System Short-Term Dynamics




Abstract
1. Introduction
1.1. Motivation
1.2. Literature Review
1.2.1. Short-Term Dynamics
1.2.2. Control Structures
1.3. Contributions
- A simple yet effective coordinated control of VPPs for short-term frequency containment, which improves the power system dynamic response and maintains frequency stability.
- A comprehensive study of the impact of different communication networks, focusing in particular on the effect of latency, on the performance and stability of the proposed coordinated control.
- An in-depth discussion of the impact of stochastic sources such as SPVG and WG on the performance of the VPP with and without the inclusion of the proposed coordinated control.
1.4. Organization
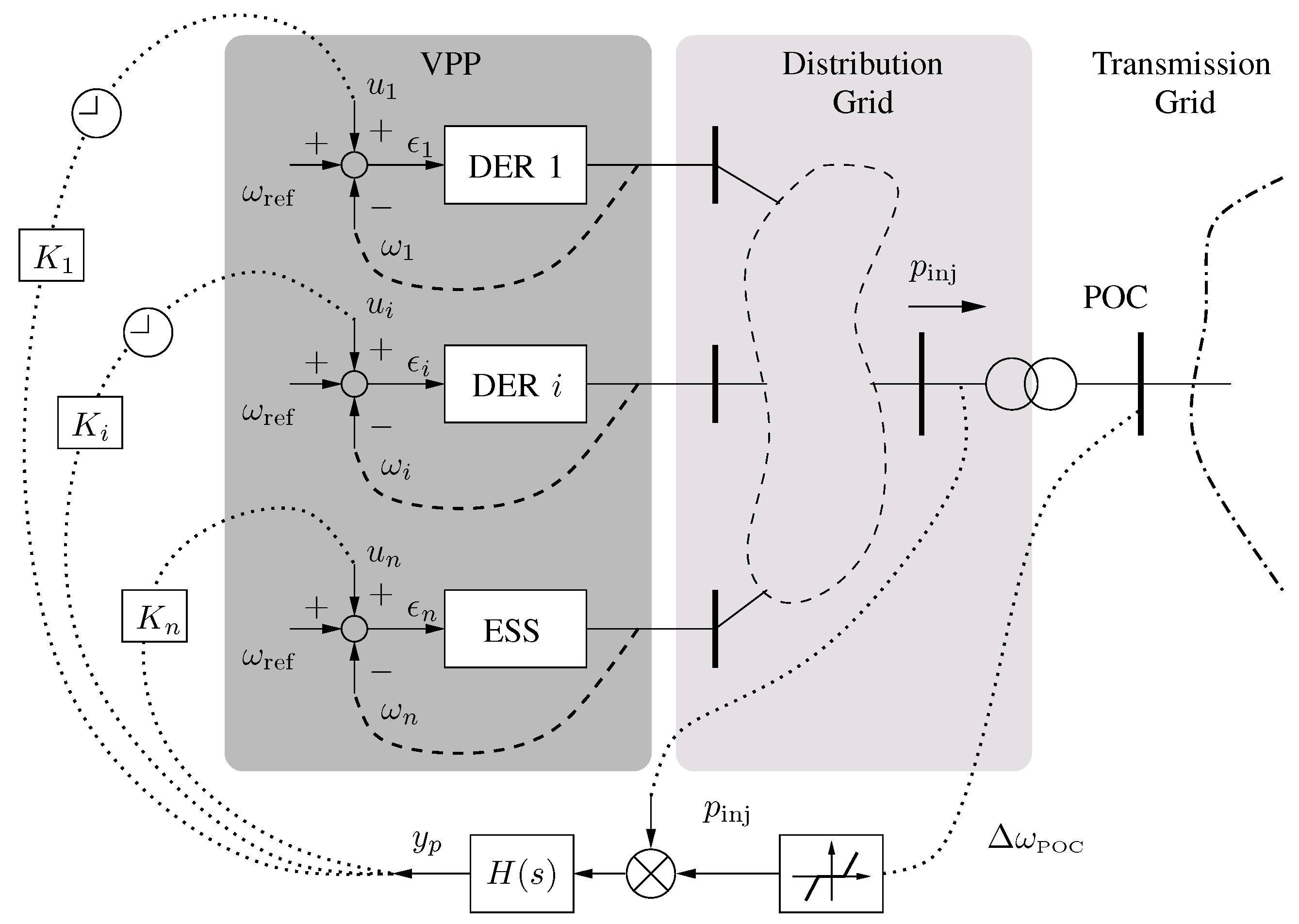
2. Control of VPPs
2.1. Proposed Coordinated Control
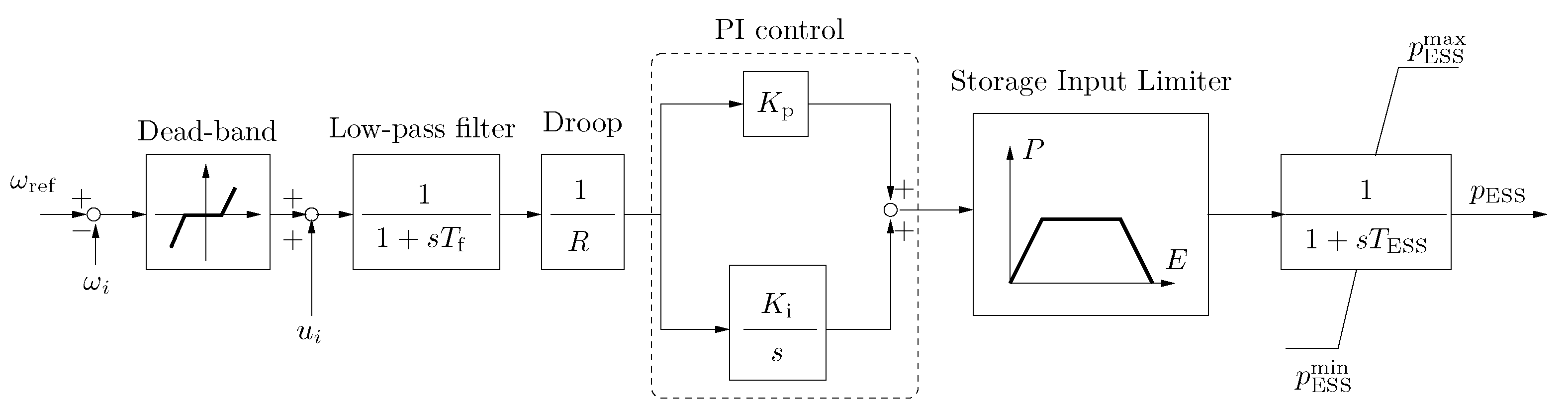
2.2. Frequency Control of Energy Storage Systems
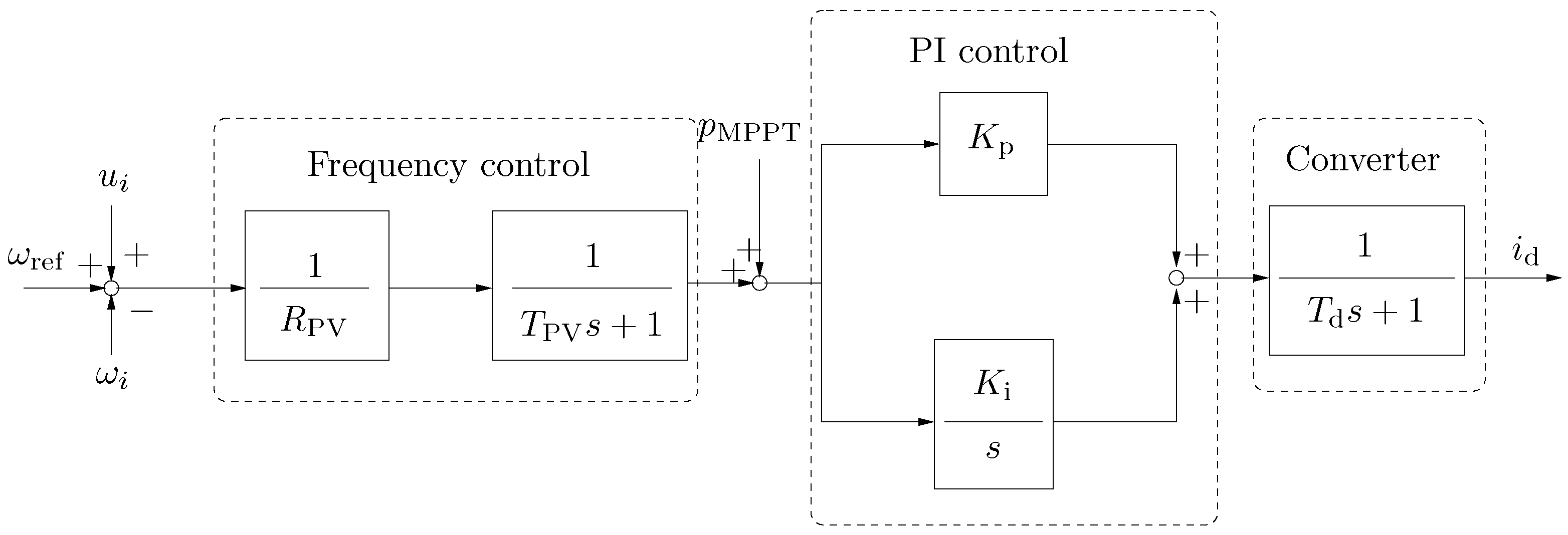
2.3. Frequency Control of Solar Photo-Voltaic Generation
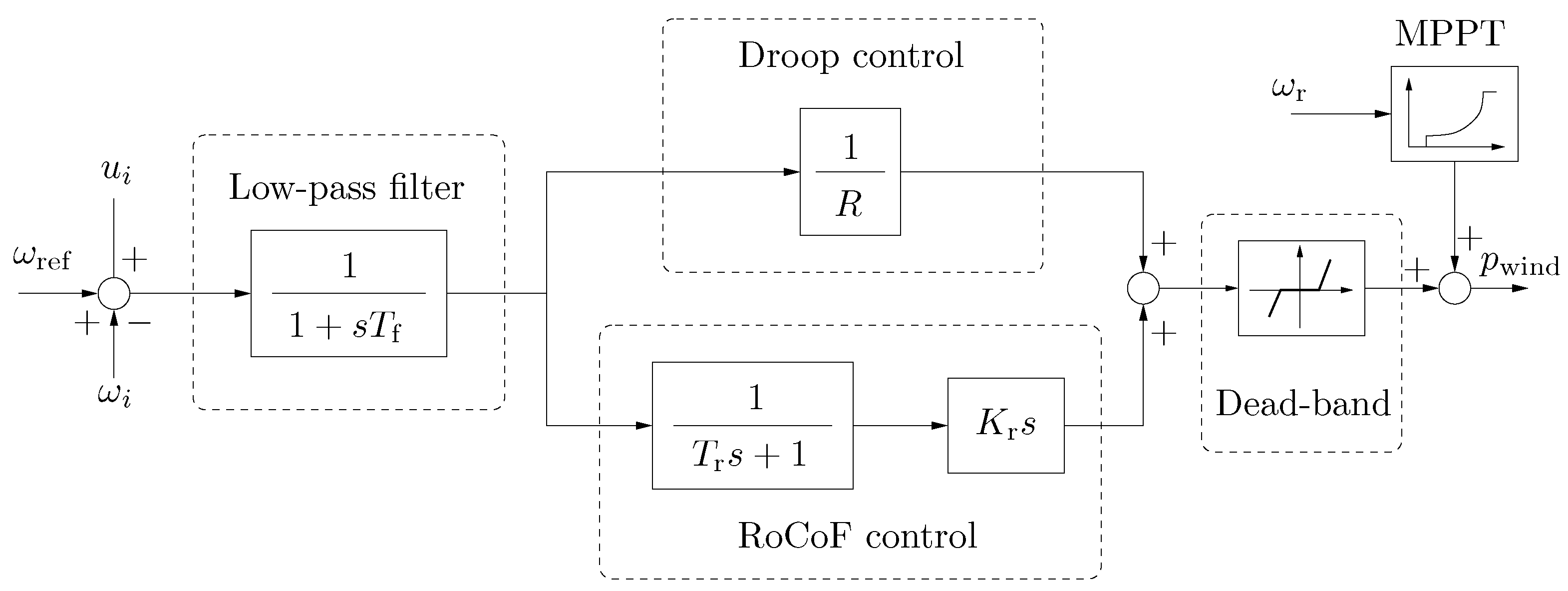
2.4. Frequency Control of Wind Power Plants
2.5. VPP Control Modes
- Mode 1: DERs and ESSs regulate the frequency but are fully independent ().
- Mode 2: Only ESSs regulate the frequency. DERs do not include a frequency controller.
- Mode 3: DERs do not include a frequency control. The ESS is regulated to keep constant the power injection of the VPP into the POC. This is a typical VPP operation mode, where TSO schedules the VPP output every 15 min.
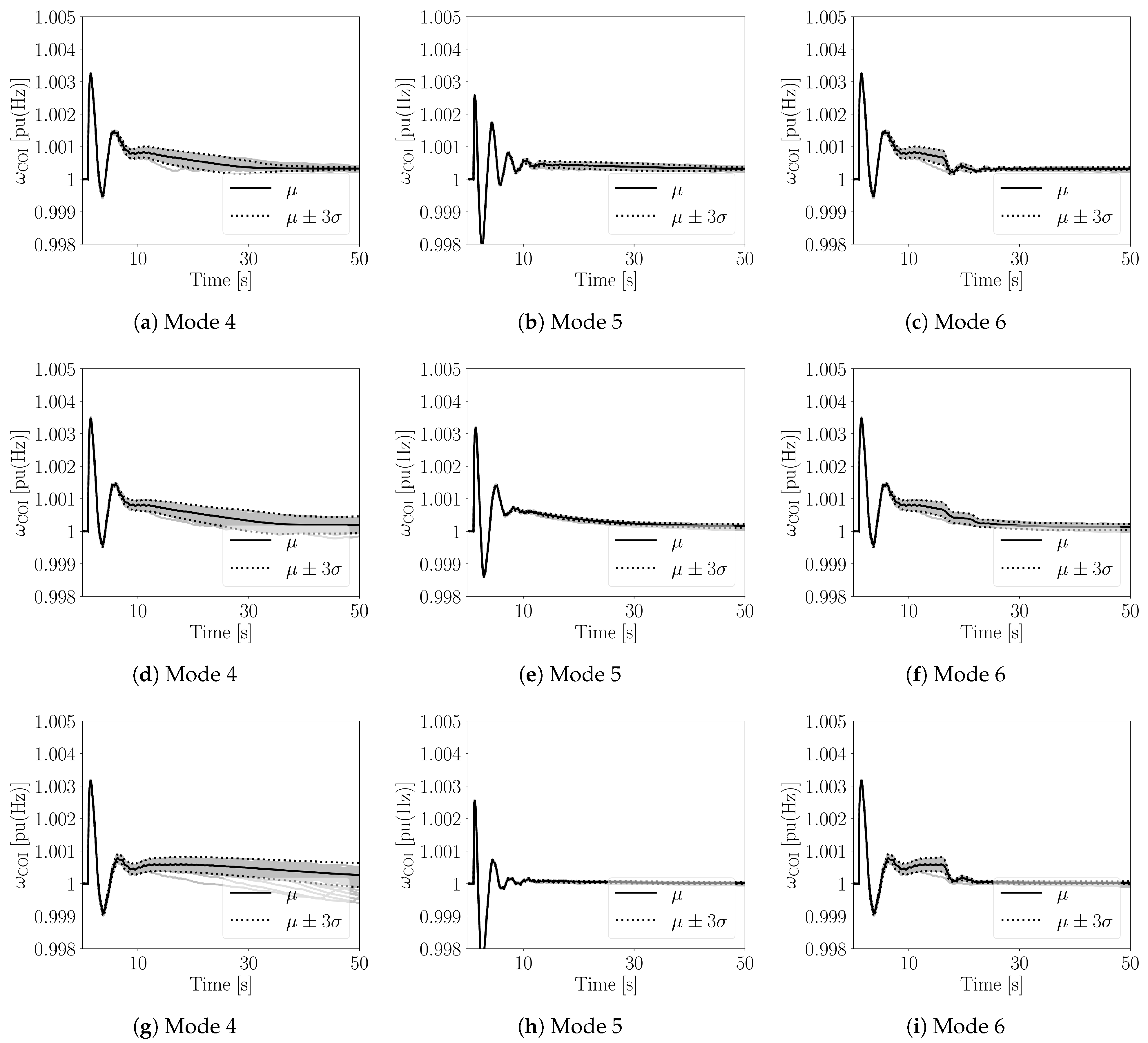
- Mode 4: In [5], the weather-driven DERs such as WGs and SPVGs are considered to be non-dispatchable resources due to the stochastic nature of the wind and clouds. The ESS is the only device that regulates frequency. Therefore, in this mode, only the ESS is fed with the signal .
- Mode 5: In [31], it is proposed that wind farms and VPPs can be used for emergency frequency control in smart super grids. Hence, in this mode, both ESS and DERs are coordinated with the signal .
- Mode 6: As with Mode 5, both the ESS and DERs are coordinated in this mode. However, the feedback signal is used differently for ESSs and DERs. ESSs are always fed with and, thus, their primary frequency regulation acts immediately after the contingency. On the other hand, DERs are included in the coordinated control and receive the signal after a given time after the occurrence of the contingency, e.g., 15 s. The timer that activates the feedback signal for the DERs is triggered by the magnitude of the variation of the frequency .
3. System Modeling
3.1. Stochastic Wind
3.2. Stochastic Load
3.3. Stochastic Solar Irradiance
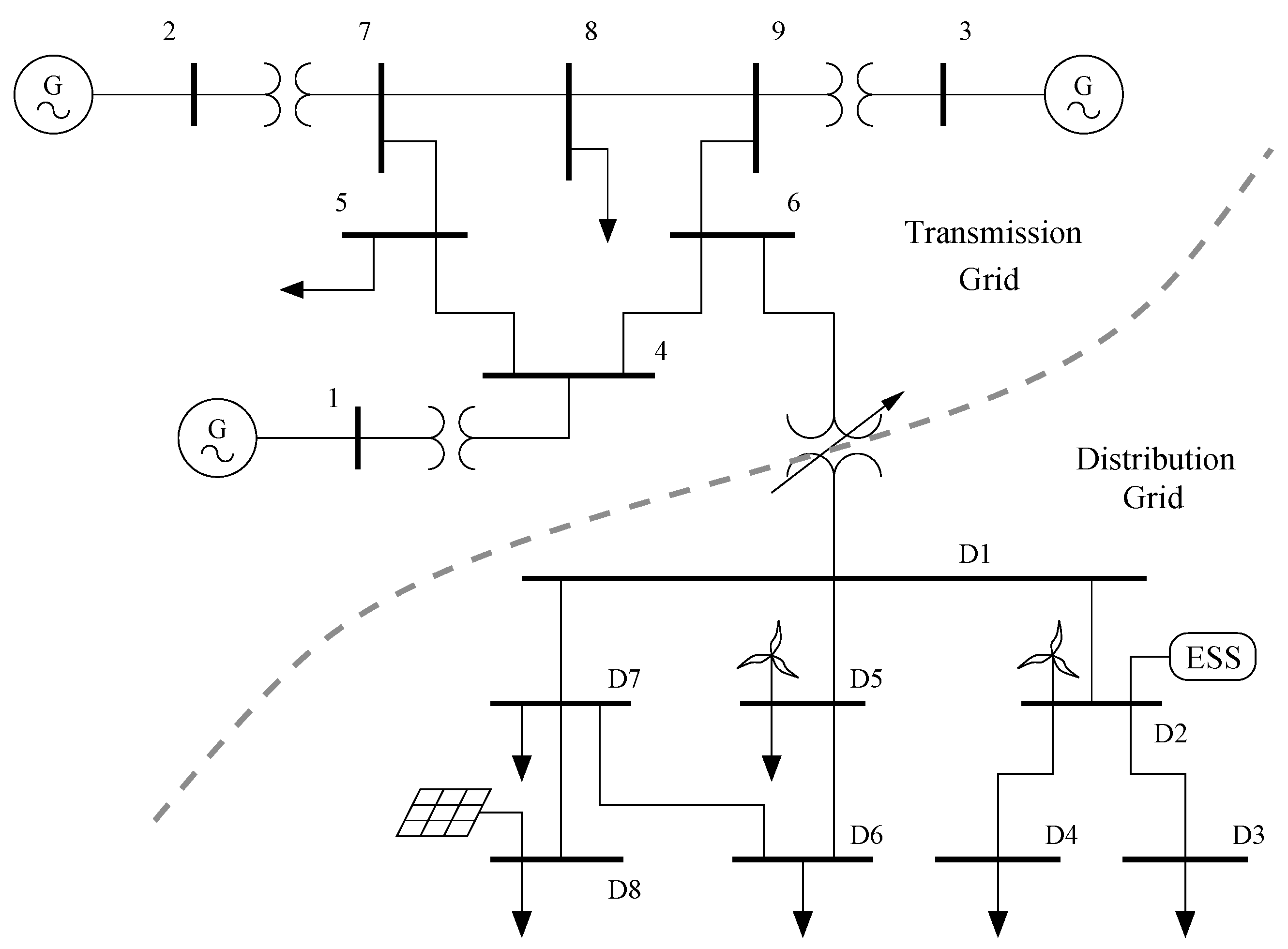
4. Case Study
- The VPP is connected through an Under-Load Tap Changer (ULTC) type step down transformer with TG.
- One SPVG, two WGs, and one ESS are connected at buses D8, D5, D2, and D2, respectively. Each DER uses the bus frequency signal by an Synchronous Reference Frame Phase-Locked Loop (SRF-PLL) installed at Bus D1 for frequency control. The initial active power generation of the WG and the SPVG are 15 MW each, whereas the power rate of the ESS is 10 MW.
- The total active and reactive power consumption of loads in the VPP are 57.8 MW and 11.7 MVar, respectively.
- Since the focus of the case study is to observe the power system short-term transient behavior (a few tens of seconds), the impact of the State of Charge (SoC) of ESS is neglected.
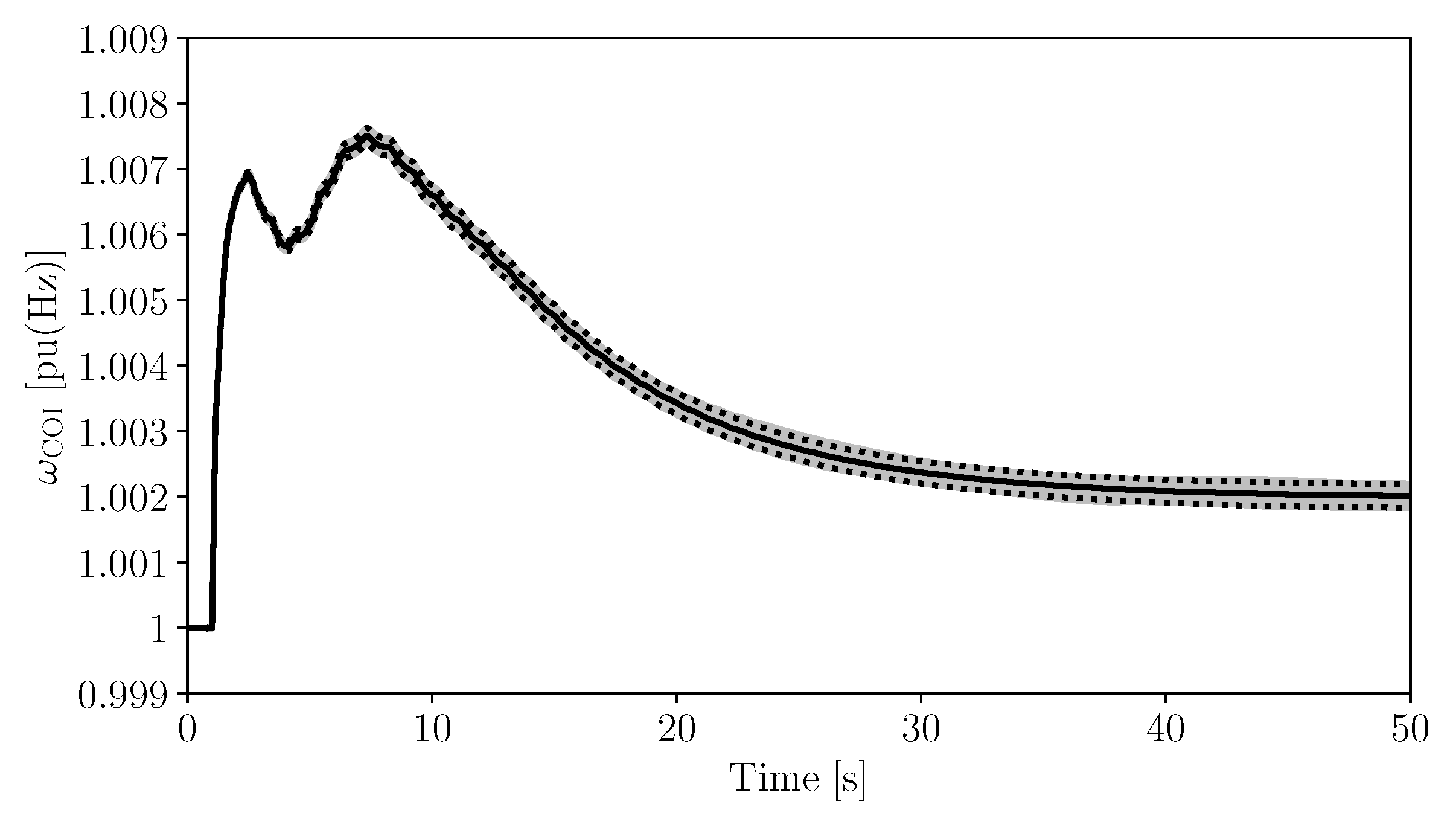
4.1. Monte Carlo Analysis
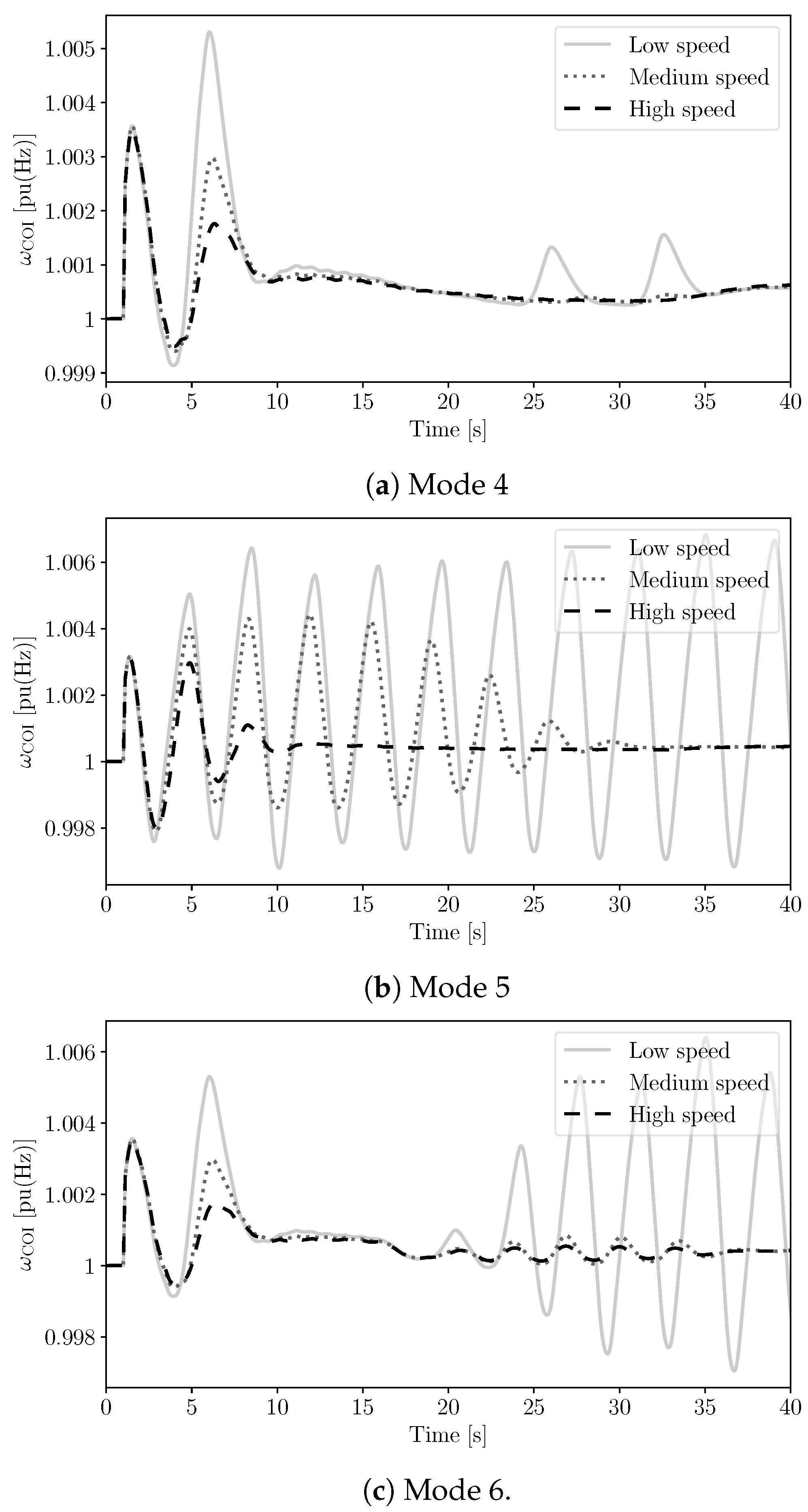
4.2. Impact of Communication Delays
5. Conclusions
- 1.
- The proposed coordinated control approach for ESS and DERs in VPP can significantly improve power system frequency stability. The proposed control approach performs better than either conventional VPPs that do not regulate the frequency, i.e., use a constant power set-point, and VPPs that regulate the frequency through the independent controllers of ESSs and DERs.
- 2.
- Communication delays have a significant impact on the proposed coordinated control approach. This had to be expected, as the proposed strategy works as a sort of fast secondary frequency control. To reduce the negative impact of communication networks without increasing the bandwidth, a two-phase coordinated control is proposed. In this operating mode, the ESS acts first whereas DERs are included in the coordinated control in a second phase. This reduces the impact of the limited capacity of the ESS and, in turn, improves the transient stability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Palizban, O.; Kauhaniemi, K.; Guerrero, J.M. Microgrids in active network management—Part I: Hierarchical control, energy storage, virtual power plants, and market participation. Renew. Sustain. Energy Rev. 2014, 36, 428–439. [Google Scholar] [CrossRef]
- Pudjianto, D.; Ramsay, C.; Strbac, G. Virtual power plant and system integration of distributed energy resources. IET Renew. Power Gener. 2007, 1, 10–16. [Google Scholar] [CrossRef]
- Ruiz, N.; Cobelo, I.; Oyarzabal, J. A direct load control model for virtual power plant management. IEEE Trans. Power Syst. 2009, 24, 959–966. [Google Scholar] [CrossRef]
- Liu, Y.; Xin, H.; Wang, Z.; Gan, D. Control of virtual power plant in microgrids: A coordinated approach based on photovoltaic systems and controllable loads. IET Gener. Transm. Distrib. 2015, 9, 921–928. [Google Scholar] [CrossRef]
- Morales, J.M.; Conejo, A.J.; Madsen, H.; Pinson, P.; Zugno, M. Virtual power plants. In Integrating Renewables in Electricity Markets; Springer: Berlin, Germany, 2014. [Google Scholar]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Han, Y.; Li, H.; Shen, P.; Coelho, E.A.A.; Guerrero, J.M. Review of active and reactive power sharing strategies in hierarchical controlled microgrids. IEEE Trans. Power Electron. 2016, 32, 2427–2451. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A. Equivalence of virtual synchronous machines and frequency-droops for converter-based microgrids. IEEE Trans. Smart Grid 2013, 5, 394–395. [Google Scholar] [CrossRef]
- Ortega, Á.; Milano, F. Frequency control of distributed energy resources in distribution networks. IFAC-PapersOnLine 2018, 51, 37–42. [Google Scholar] [CrossRef]
- Zhong, W.; Murad, M.A.A.; Liu, M.; Milano, F. Impact of Virtual Power Plants on Power System Short-Term Transient Response. Electr. Power Syst. Res. 2020, 189, 106609. [Google Scholar] [CrossRef]
- Liu, M.; Chen, J.; Milano, F. On-line Inertia Estimation for Synchronous and Non-Synchronous Devices. IEEE Trans. Power Syst. 2020. [CrossRef]
- Vovos, P.N.; Kiprakis, A.E.; Wallace, A.R.; Harrison, G.P. Centralized and distributed voltage control: Impact on distributed generation penetration. IEEE Trans. Power Syst. 2007, 22, 476–483. [Google Scholar] [CrossRef]
- Savaghebi, M.; Jalilian, A.; Vasquez, J.C.; Guerrero, J.M. Secondary control scheme for voltage unbalance compensation in an islanded droop-controlled microgrid. IEEE Trans. Smart Grid 2012, 3, 797–807. [Google Scholar] [CrossRef]
- Meng, L.; Tang, F.; Savaghebi, M.; Vasquez, J.C.; Guerrero, J.M. Tertiary control of voltage unbalance compensation for optimal power quality in islanded microgrids. IEEE Trans. Energy Convers. 2014, 29, 802–815. [Google Scholar] [CrossRef]
- Acharya, S.; El-Moursi, M.S.; Al-Hinai, A.; Al-Sumaiti, A.S.; Zeineldin, H.H. A control strategy for voltage unbalance mitigation in an islanded microgrid considering demand side management capability. IEEE Trans. Smart Grid 2018, 10, 2558–2568. [Google Scholar] [CrossRef]
- Kim, J.; Lin, X.; Shroff, N.B. Optimal anycast technique for delay-sensitive energy-constrained asynchronous sensor networks. IEEE/ACM Trans. Netw. 2010, 19, 484–497. [Google Scholar] [CrossRef]
- Gelman, J.R.; Stadler, J.S. Method and Apparatus for Improving Efficiency of TCP/IP Protocol over High Delay-Bandwidth Network. US Patent 6,415,329, 2 July 2002. [Google Scholar]
- Milano, F.; Anghel, M. Impact of time delays on power system stability. IEEE Trans. Circ. Syst. I Regul. Pap. 2011, 59, 889–900. [Google Scholar] [CrossRef]
- Kekatos, V.; Wang, G.; Conejo, A.J.; Giannakis, G.B. Stochastic reactive power management in microgrids with renewables. IEEE Trans. Power Syst. 2014, 30, 3386–3395. [Google Scholar] [CrossRef]
- Yang, H.; Yi, D.; Zhao, J.; Dong, Z. Distributed optimal dispatch of virtual power plant via limited communication. IEEE Trans. Power Syst. 2013, 28, 3511–3512. [Google Scholar] [CrossRef]
- Schiffer, J.; Seel, T.; Raisch, J.; Sezi, T. Voltage stability and reactive power sharing in inverter-based microgrids with consensus-based distributed voltage control. IEEE Trans. Control Syst. Technol. 2015, 24, 96–109. [Google Scholar] [CrossRef]
- Simpson-Porco, J.W.; Shafiee, Q.; Dörfler, F.; Vasquez, J.C.; Guerrero, J.M.; Bullo, F. Secondary frequency and voltage control of islanded microgrids via distributed averaging. IEEE Trans. Ind. Electron. 2015, 62, 7025–7038. [Google Scholar] [CrossRef]
- Li, Q.; Chen, F.; Chen, M.; Guerrero, J.M.; Abbott, D. Agent-based decentralized control method for islanded microgrids. IEEE Trans. Smart Grid 2015, 7, 637–649. [Google Scholar] [CrossRef]
- Ahumada, C.; Cárdenas, R.; Saez, D.; Guerrero, J.M. Secondary control strategies for frequency restoration in islanded microgrids with consideration of communication delays. IEEE Trans. Smart Grid 2015, 7, 1430–1441. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Sinopoli, B.; Garone, E. Feasibility and detection of replay attack in networked constrained cyber-physical systems. In Proceedings of the 57th Annual Allerton Conference on Communication, Control, and Computing, Monticello, IL, USA, 24–27 September 2019; pp. 712–717. [Google Scholar]
- Liu, Y.; Ning, P.; Reiter, M.K. False data injection attacks against state estimation in electric power grids. ACM Trans. Inf. Syst. Secur. 2011, 14, 1–33. [Google Scholar] [CrossRef]
- Chen, W.; Ding, D.; Dong, H.; Wei, G. Distributed resilient filtering for power systems subject to denial-of-service attacks. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1688–1697. [Google Scholar] [CrossRef]
- Ortega, Á.; Milano, F. Generalized model of VSC-based energy storage systems for transient stability analysis. IEEE Trans. Power Syst. 2015, 31, 3369–3380. [Google Scholar] [CrossRef]
- Tamimi, B.; Cañizares, C.; Bhattacharya, K. Modeling and performance analysis of large solar photo-voltaic generation on voltage stability and inter-area oscillations. In Proceedings of the IEEE PES General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–5. [Google Scholar]
- Morren, J.; De Haan, S.W.; Kling, W.L.; Ferreira, J.A. Wind turbines emulating inertia and supporting primary frequency control. IEEE Trans. Power Syst. 2006, 21, 433–434. [Google Scholar] [CrossRef]
- Arestova, A.; Sidorkin, Y. The use of wind farms and virtual power plants for emergency control in the future smart super grids. In Proceedings of the 2011 6th International Forum on Strategic Technology, Harbin, China, 22–24 August 2011; pp. 437–442. [Google Scholar]
- Milano, F.; Zárate-Miñano, R. A systematic method to model power systems as stochastic differential algebraic equations. IEEE Trans. Power Syst. 2013, 28, 4537–4544. [Google Scholar] [CrossRef]
- Zárate-Miñano, R.; Mele, F.M.; Milano, F. SDE-based wind speed models with Weibull distribution and exponential autocorrelation. In Proceedings of the IEEE PES General Meeting, Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Jónsdóttir, G.M.; Milano, F. Modeling Solar Irradiance for Short-term Dynamic Analysis of Power Systems. In Proceedings of the IEEE PES General Meeting, Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Pasetti, M.; Rinaldi, S.; Manerba, D. A virtual power plant architecture for the demand-side management of smart prosumers. Appl. Sci. 2018, 8, 432. [Google Scholar] [CrossRef]
- Pahwa, A.; DeLoach, S.A.; Natarajan, B.; Das, S.; Malekpour, A.R.; Alam, S.S.; Case, D.M. Goal-based holonic multiagent system for operation of power distribution systems. IEEE Trans. Smart Grid 2015, 6, 2510–2518. [Google Scholar] [CrossRef]
- Naduvathuparambil, B.; Valenti, M.C.; Feliachi, A. Communication delays in wide area measurement systems. In Proceedings of the Thirty-Fourth Southeastern Symposium on System Theory (Cat. No. 02EX540), Huntsville, AL, USA, 19 March 2002; pp. 118–122. [Google Scholar]
- Liu, M.; Dassios, I.; Tzounas, G.; Milano, F. Stability analysis of power systems with inclusion of realistic-modeling WAMS delays. IEEE Trans. Power Syst. 2018, 34, 627–636. [Google Scholar] [CrossRef]
- Sauer, P.W.; Pai, M.A. Power System Dynamics and Stability; Prentice Hall: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- Murphy, C.; Keane, A. Local and remote estimations using fitted polynomials in distribution systems. IEEE Trans. Power Syst. 2016, 32, 3185–3194. [Google Scholar] [CrossRef]
- Zhong, W.; Liu, M.; Milano, F. A co-simulation framework for power systems and communication networks. In Proceedings of the In 2019 IEEE Milan PowerTech, Milano, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Milano, F. A Python-based software tool for power system analysis. In Proceedings of the IEEE PES General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Riley, G.F.; Henderson, T.R. The ns-3 network simulator. In Modeling and Tools for Network Simulation; Springer: Berlin, Germany, 2010. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistics | Mode 1 | Mode 2 | Mode 3 | |
|---|---|---|---|---|
| [pu(Hz)] | ||||
| Control Type | Statistics | Mode 4 | Mode 5 | Mode 6 |
| Prop. Control | [pu(Hz)] | |||
| [pu(Hz)] | ||||
| Lead-Lag | [pu(Hz)] | |||
| [pu(Hz)] | ||||
| PI | [pu(Hz)] | |||
| [pu(Hz)] |
| Levels | Bandwidth | PMU Data Rate | Background Traffic |
|---|---|---|---|
| High Speed | 20 Mbps | 25 frames/s | RTU, Video Stream |
| Medium Speed | 5 Mbps | 25 frames/s | RTU, Video Stream |
| Low Speed | 1 Mbps | 25 frames/s | N/A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, W.; Chen, J.; Liu, M.; Murad, M.A.A.; Milano, F. Coordinated Control of Virtual Power Plants to Improve Power System Short-Term Dynamics. Energies 2021, 14, 1182. https://doi.org/10.3390/en14041182
Zhong W, Chen J, Liu M, Murad MAA, Milano F. Coordinated Control of Virtual Power Plants to Improve Power System Short-Term Dynamics. Energies. 2021; 14(4):1182. https://doi.org/10.3390/en14041182
Chicago/Turabian StyleZhong, Weilin, Junru Chen, Muyang Liu, Mohammed Ahsan Adib Murad, and Federico Milano. 2021. "Coordinated Control of Virtual Power Plants to Improve Power System Short-Term Dynamics" Energies 14, no. 4: 1182. https://doi.org/10.3390/en14041182
APA StyleZhong, W., Chen, J., Liu, M., Murad, M. A. A., & Milano, F. (2021). Coordinated Control of Virtual Power Plants to Improve Power System Short-Term Dynamics. Energies, 14(4), 1182. https://doi.org/10.3390/en14041182