
Optimized Extreme Learning Machine-Based Main Bearing Temperature Monitoring Considering Ambient Conditions’ Effects

Abstract
1. Introduction
- The effects of ambient conditions (ambient temperature and wind speed change) on a WT’s internal temperature are investigated.
- Changes in the ambient conditions are used as the input of the WT temperature model. To our knowledge, this study is the first to use wind speed change as the input of a WT model.
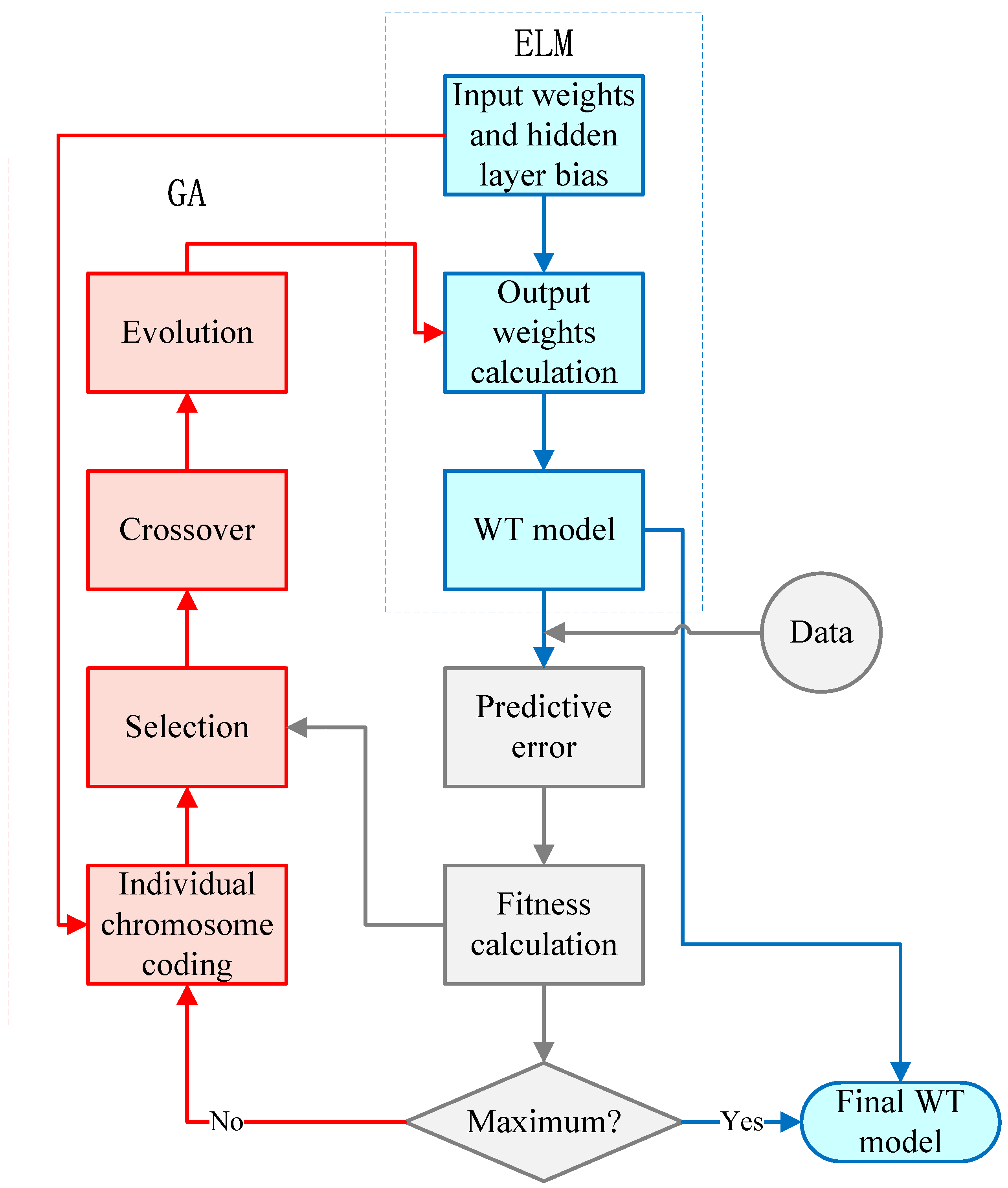
- GA is used to optimize ELM to avoid local minima due to the irregularity of initial input weights and hidden layer bias.
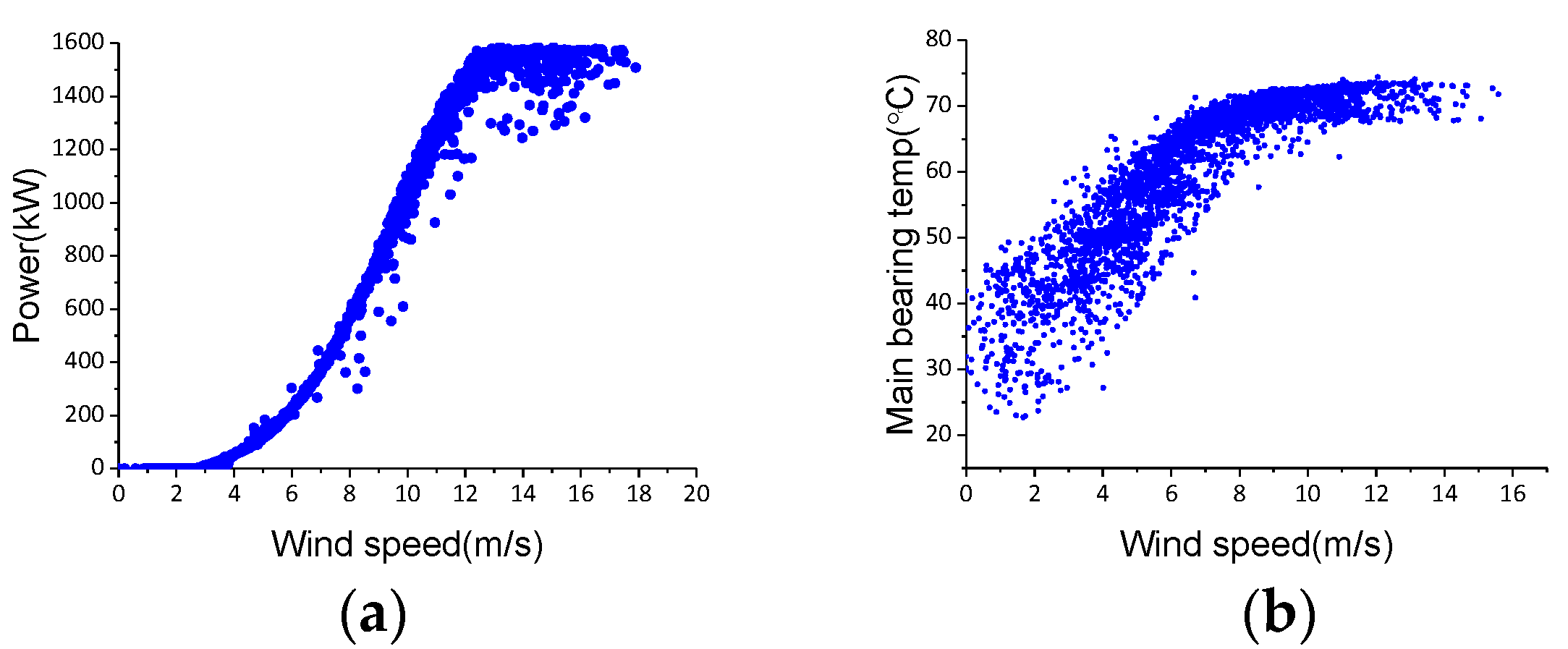
2. Effects of Ambient Conditions
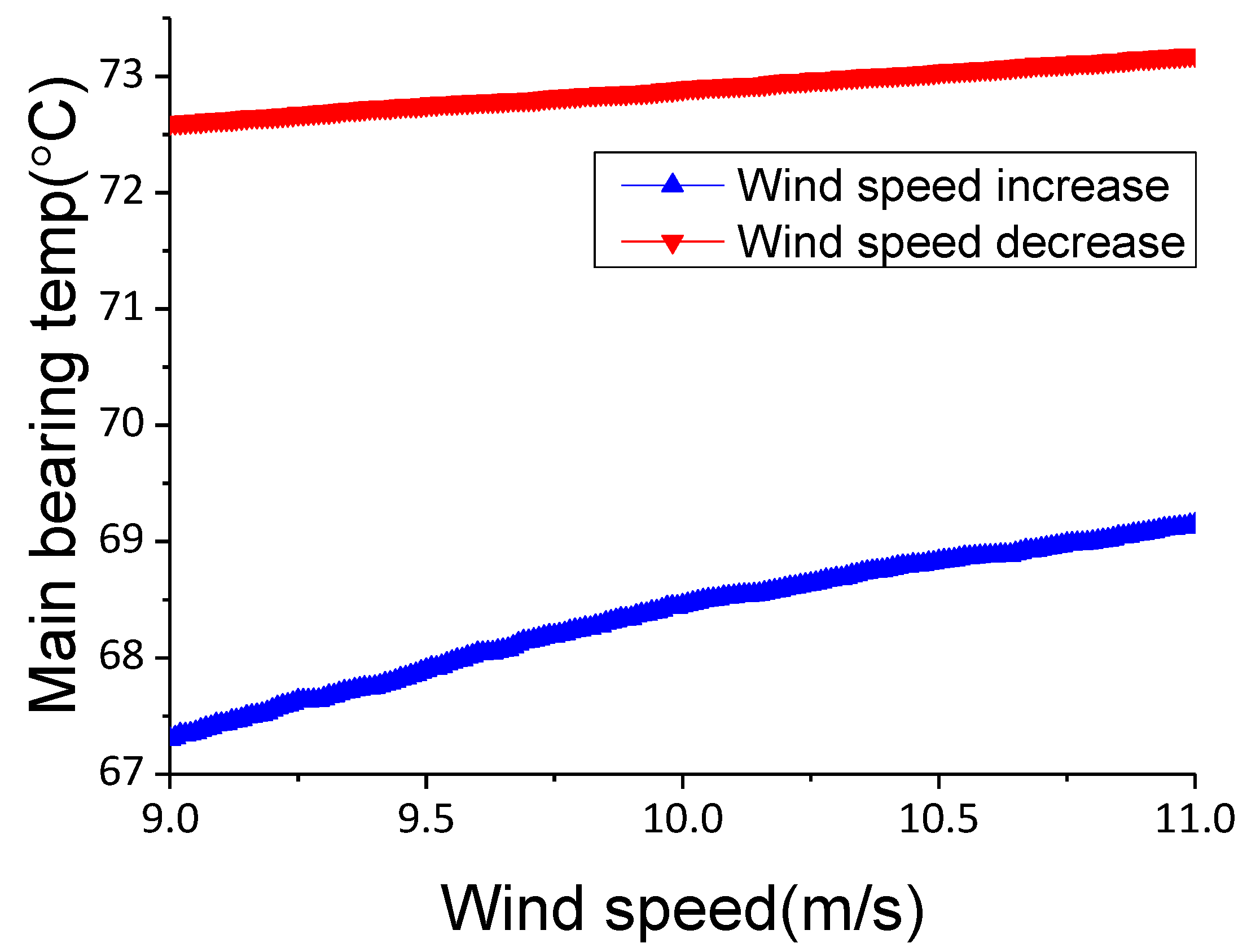
2.1. Wind Speed Change
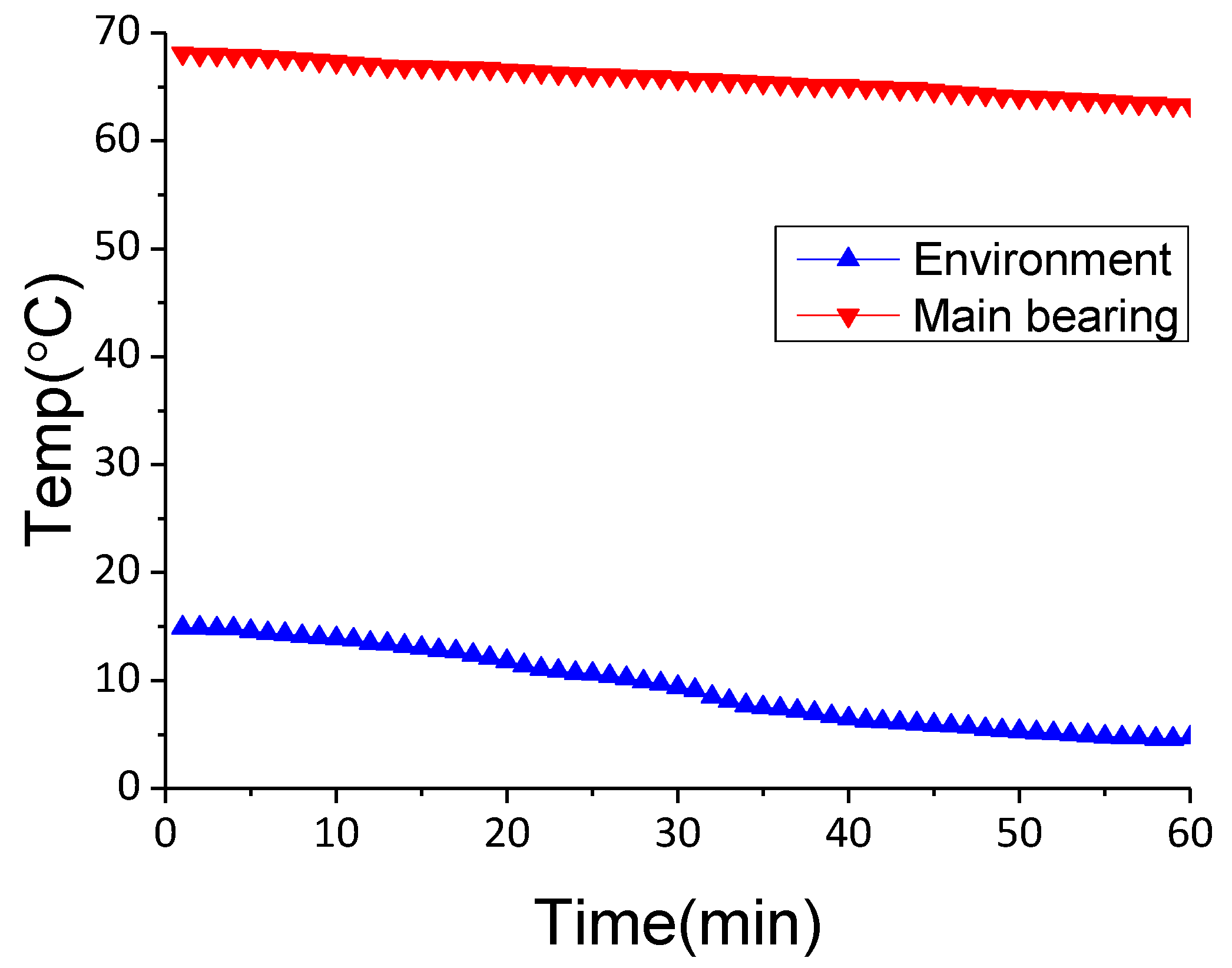
2.2. Ambient Temperature Change
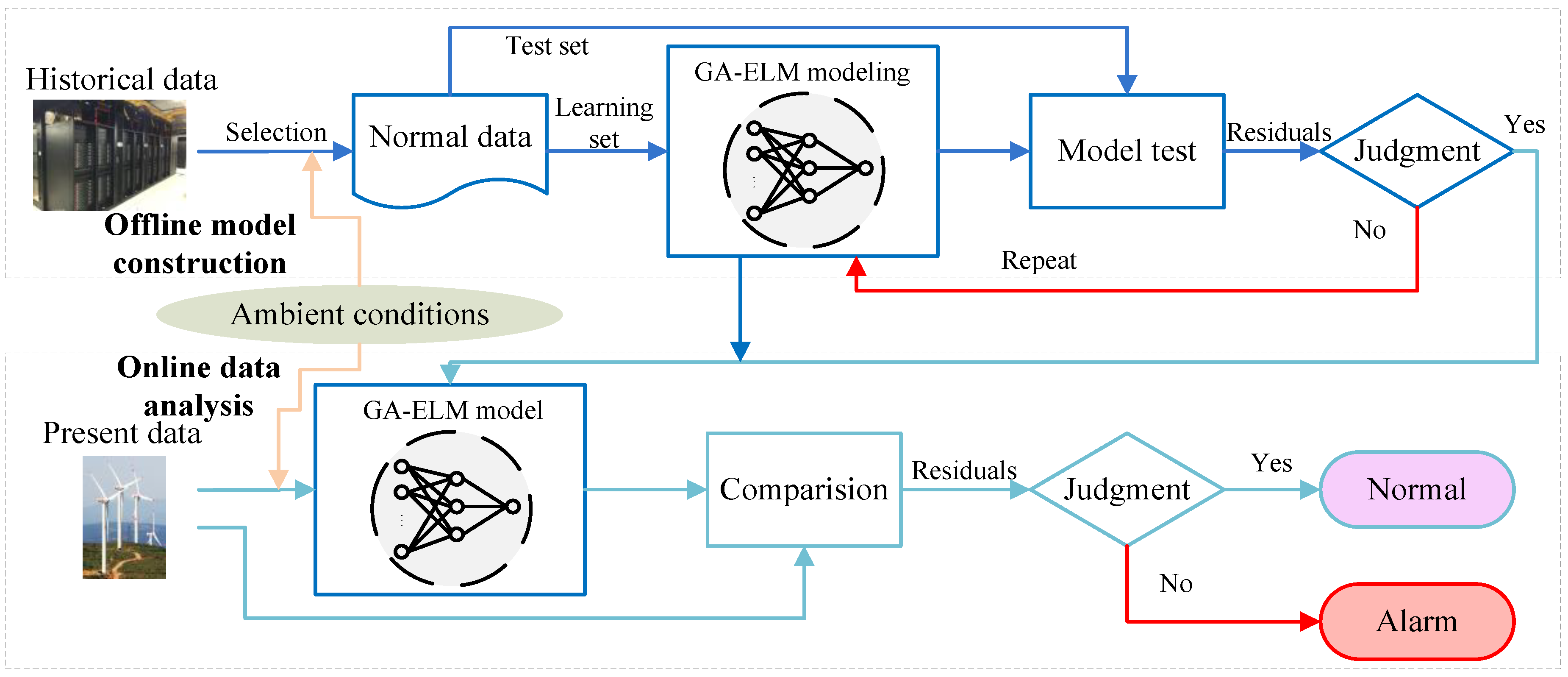
3. WT Monitoring Framework
3.1. Overview of the Proposed Framework
3.2. Input Parameter Selection
3.3. GA-ELM Modeling
4. Model Development and Validation
4.1. SCADA Datasets
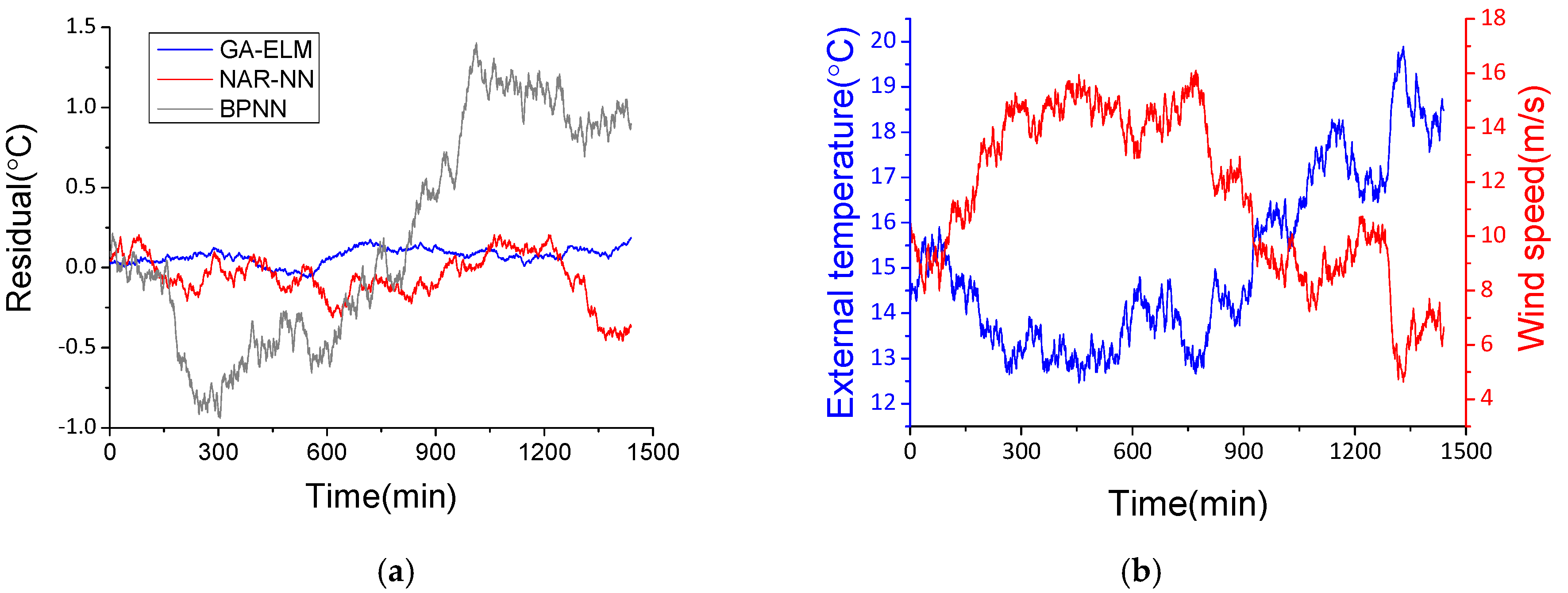
4.2. Model Testing Result
5. Case Study
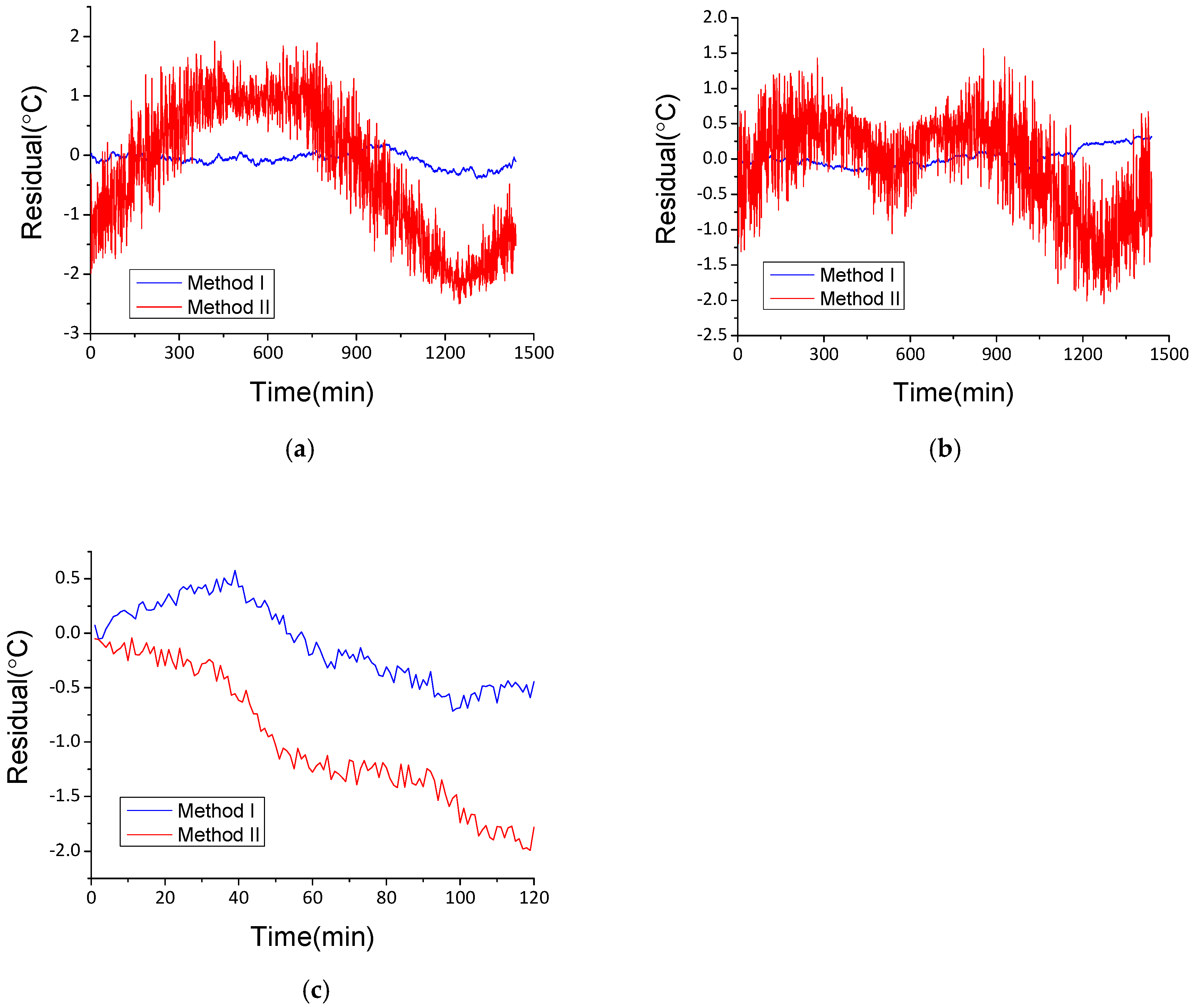
5.1. Ambient Temperature Change in Normal State
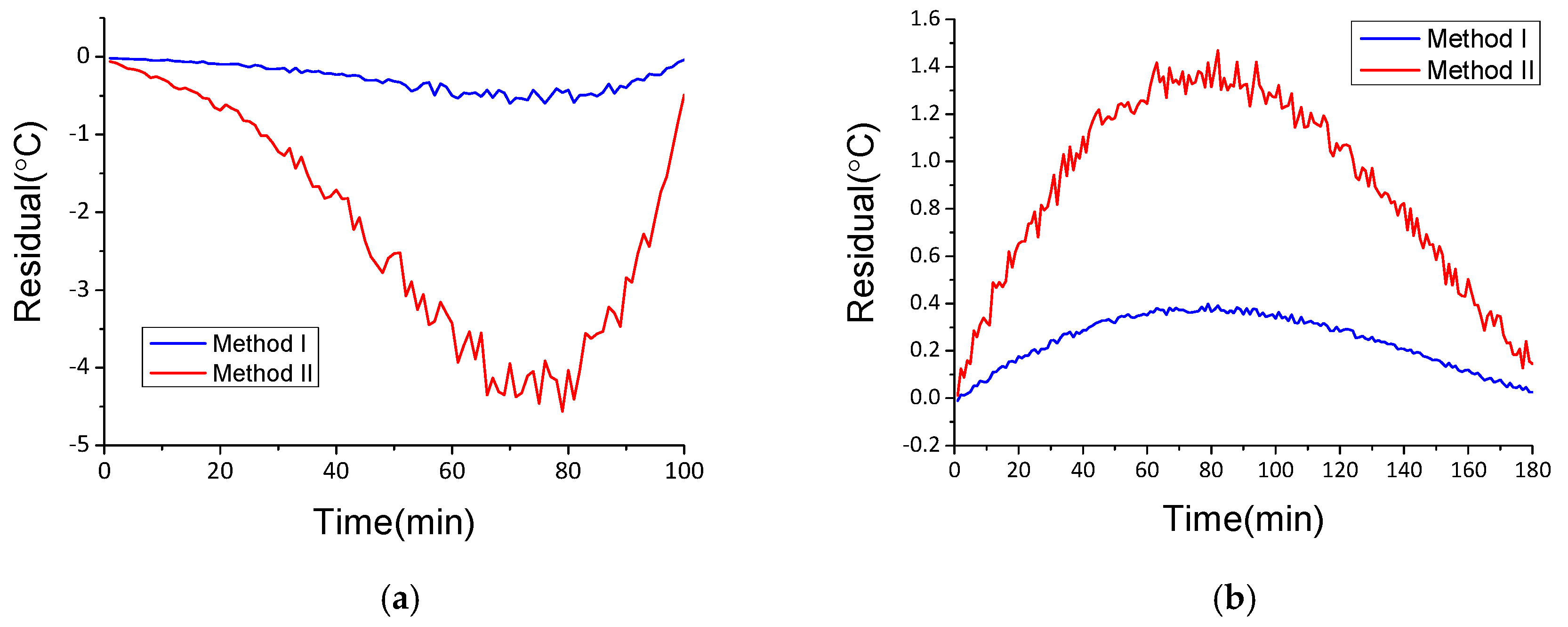
5.2. Wind Speed Change in Normal State
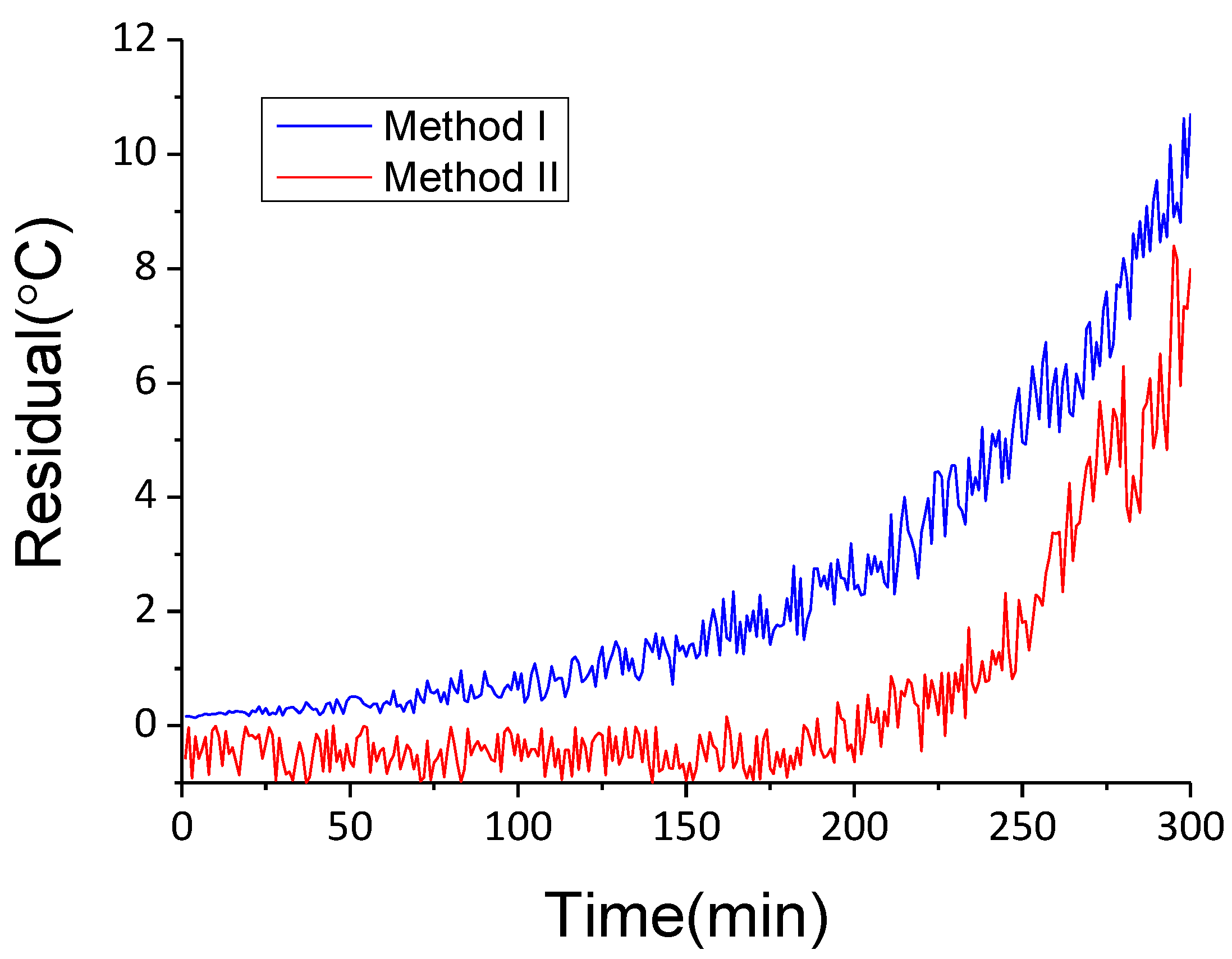
5.3. Main Bearing Failure Detection
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yaramasu, V.; Wu, B.; Kouro, S. High-power wind energy conversion systems: State-of-the-art and emerging technologies. Proc. IEEE 2015, 103, 740–788. [Google Scholar] [CrossRef]
- Garrigle, E.M.; Leahy, P.G. Cost Savings from Relaxation of Operational Constraints on a Power System with High Wind Penetration. IEEE Trans. Sustain. Energy 2017, 6, 881–888. [Google Scholar] [CrossRef]
- Hou, Z.; Zhuang, S.; Lv, X. Monitoring and Analysis of Wind Turbine Condition based on Multivariate Immunity Perception. In Proceedings of the 2019 International Energy and Sustainability Conference (IESC), Farmingdale, NY, USA, 17–18 October 2019; pp. 1–5. [Google Scholar]
- Xia, G.; Zhou, L.; Minder, J.; Fovell, R.; Jimenez, P. Simulating impacts of real-world wind farms on land surface temperature using the WRF model: Physical mechanisms. Clim. Dyn. 2019, 53, 3. [Google Scholar] [CrossRef]
- Al-Masri, H.; Ab dullah, A.; AlmehiziaEhsani, M. Accurate Wind Turbine Annual Energy Computation by Advanced Modeling. IEEE Trans. Ind. Appl. 2017, 3, 1. [Google Scholar] [CrossRef]
- Bakdi, A.; Kouadri, A.; Mekhilef, S. A data-driven algorithm for online detection of component and system faults in modern wind turbines at different operating zones. Renew. Sustain. Energy Rev. 2019, 103, 546–555. [Google Scholar] [CrossRef]
- Long, H.; Wang, L.; Zhang, Z.; Song, Z.; Xu, J. Data-Driven Wind Turbine Power Generation Performance Monitoring. IEEE Trans. Ind. Electron. 2015, 62, 6627–6635. [Google Scholar] [CrossRef]
- Kusiak, A.; Zhang, Z. Short-Horizon Prediction of Wind Power: A Data-Driven Approach. Energy Conversion. IEEE Trans. Ind. Electron. 2010, 25, 1112–1122. [Google Scholar]
- Reder, M.; Yurusen, N.Y.; Melero, J.J. Data-driven learning framework for associating weather conditions and wind turbine failures. Reliab. Eng. Syst. Saf. 2018, 169, 554. [Google Scholar] [CrossRef]
- Yin, S.; Wang, G.; Karimi, H.R. Data-driven design of robust fault detection system for wind turbines. Mechatronics 2014, 24, 298–306. [Google Scholar] [CrossRef]
- Yang, W.; Court, R.; Jiang, J. Wind turbine condition monitoring by the approach of SCADA data analysis. Renew. Energy 2013, 53, 365–376. [Google Scholar] [CrossRef]
- Mazur, D.C.; Entzminger, R.A.; Kay, J.A. Enhancing Traditional Process SCADA and Historians for Industrial & Commercial Power Systems with Energy (Via IEC 61850). IEEE Trans. Ind. 2016, 52, 76–82. [Google Scholar]
- MDIlicXie, L.; Joo, J.Y. Efficient Coordination of Wind Power and Price-Responsive Demand—Part I: Theoretical Foundations. Power Systems. IEEE Trans. 2011, 26, 1875–1884. [Google Scholar]
- Velandia-Cardenas, C.; Vidal, Y.; Pozo, F. Wind Turbine Fault Detection Using Highly Imbalanced Real SCADA Data. Energies 2021, 14, 1728. [Google Scholar] [CrossRef]
- Kusiak, A.; Li, W. Virtual Models for Prediction of Wind Turbine Parameters. IEEE Trans. Energy Convers. 2010, 25, 245–252. [Google Scholar] [CrossRef]
- Peng, G.; Infield, D. Wind Turbine Tower Vibration Modeling and Monitoring by the Nonlinear State Estimation Technique (NSET). Energies 2012, 5, 5279–5293. [Google Scholar]
- Wang, Y.; Infield, D.G. Multi-machine Based Wind Turbine Gearbox Condition Monitoring Using Nonlinear State Estimation Technique. EWEA 2014, 2014. [Google Scholar] [CrossRef]
- Zhao, W.S.; Qu, C.Y.; Zhang, H.B. Direct-Drive Wind Turbine Fault Diagnosis Based on Logistic Regression. In Proceedings of the 15th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 14–16 December 2018. [Google Scholar]
- Wu, F.T.; Wang, C.C.; Liu, J.H.; Chang, C.-M.; Lee, Y.-P. Construction of Wind Turbine Bearing Vibration Monitoring and Performance Assessment System. J. Signal Inf. Process. 2013, 4, 430–438. [Google Scholar] [CrossRef][Green Version]
- Wenyi, L.; Zhenfeng, W.; Jiguang, H.; Guangfeng, W. Wind turbine fault diagnosis method based on diagonal spectrum and clustering binary tree SVM. Renew. Energy 2013, 50, 1–6. [Google Scholar] [CrossRef]
- Santos, P.; Villa, L.; Renones, A.; Bustillo, A. An SVM-Based Solution for Fault Detection in Wind Turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef]
- Kandukuri, S.T.; Senanayaka, J.; Huynh, K.V.; Robbersmyr, K.G. A Two-Stage Fault Detection and Classification Scheme for Electrical Pitch Drives in Offshore Wind Farms Using Support Vector Machine. IEEE Trans. Ind. Appl. 2019, 55, 5109–5118. [Google Scholar] [CrossRef]
- Rahimilarki, R.; Gao, Z.; Zhang, A.; Binns, R. Robust neural network fault estimation approach for nonlinear dynamic systems with applications to wind turbine systems. IEEE Trans. Ind. Inform. 2019, 15, 6302–6312. [Google Scholar] [CrossRef]
- Bangalore, P.; Tjernberg, L.B. An Artificial Neural Network Approach for Early Fault Detection of Gearbox Bearings. IEEE Trans. Smart Grid 2017, 6, 980–987. [Google Scholar] [CrossRef]
- Qu, F.; Liu, J.; Liu, X.; Jiang, L. A Multi-fault Detection Method with Improved Triplet Loss Based on Hard Sample Mining. IEEE Trans. Sustain. Energy 2020, 12, 127–137. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, H.; Sun, Z.; Dong, W.; Dong, Y. Fault Diagnosis of Wind Turbine Power Converter Considering Wavelet Transform, Feature Analysis, Judgment and BP Neural Network. IEEE Access 2019, 7, 179799–179809. [Google Scholar] [CrossRef]
- Kusiak, A.; Zhang, Z.; Li, M. Optimization of Wind Turbine Performance with Data-Driven Models. IEEE Trans. Sustain. Energy 2010, 1, 66–76. [Google Scholar] [CrossRef]
- Ak, R.; Fink, O.; Zio, E. Two Machine Learning Approaches for Short-Term Wind Speed Time-Series Prediction. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1734–1747. [Google Scholar] [CrossRef]
- Li, S.; Wang, P.; Goel, L. Short-term load forecasting by wavelet transform and evolutionary extreme learning machine. Electr. Power Syst. Res. 2015, 122, 96–103. [Google Scholar] [CrossRef]
- Wan, C.; Xu, Z.; Pinson, P. Probabilistic forecasting of wind power generation using extreme learning machines. IEEE Trans. Power Syst. 2014, 29, 1033–1044. [Google Scholar] [CrossRef]
- Wan, C.; Xu, Z.; Wang, Y. A hybrid approach for probabilistic forecasting of electricity prices. IEEE Trans. Smart Grid 2014, 5, 463–470. [Google Scholar] [CrossRef]
- Wan, C.; Zhao, X.; Pierre, P. Optimal prediction intervals of wind power generation. IEEE Trans. Power Syst. 2014, 29, 1166–1174. [Google Scholar] [CrossRef]
- Liu, S.; Hou, Z.; Yin, C. Data-Driven Modeling for UGI Gasification Processes via an Enhanced Genetic BP Neural Network with Link Switches. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 2718–2729. [Google Scholar] [CrossRef] [PubMed]
- Shen, X.; Zheng, Y.; Zhang, R. A Hybrid Forecasting Model for the Velocity of Hybrid Robotic Fish Based on Back-Propagation Neural Network with Genetic Algorithm Optimization. IEEE Access 2020, 8, 111731–111741. [Google Scholar] [CrossRef]
- Kaleeswaran, V.; Dhamodharavadhani, S.; Rathipriya, R. A Comparative Study of Activation Functions and Training Algorithm of NAR Neural Network for Crop Prediction. In Proceedings of the 2020 4th International Conference on Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 5–7 November 2020. [Google Scholar]
- Villanueva, D.; AFeijó, A. Normal-Based Model for True Power Curves of Wind Turbines. IEEE Trans. Sustain. Energy 2016, 7, 1005–1011. [Google Scholar] [CrossRef]
- Xie, K.; Jiang, Z.; Li, W. Effect of Wind Speed on Wind Turbine Power Converter Reliability. IEEE Trans. Energy Convers. Ec. 2012, 27, 96–104. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Start and End Time | Number of Data | Ambient Temperature | Wind Speed |
|---|---|---|---|---|
| Learning set | 1 May 00:00 20 May 23:59 | 28,800 | (8.41, 31.79) °C | (0.23, 23.62) m/s |
| Testing set | 21 May 00:00 21 May 23:59 | 1440 | (12.45, 20.02) °C | (4.63, 16.09) m/s |
| Criteria | GA-ELM | ELM | BPNN |
|---|---|---|---|
| MSE | 0.10 | 0.21 | 0.58 |
| MAE | 0.19 | 0.59 | 0.91 |
| MAPE (%) | 0.26 | 0.73 | 1.84 |
| Time (s) | 3.46 | 3.22 | 3.15 |
| Dataset | Start and End Time | Number of Data | Ambient Temperature | Wind Speed |
|---|---|---|---|---|
| Winter | 28 January 00:00–23:59 | 1440 | (−10.58,−0.02) °C | (9.75, 19.38) m/s |
| Summer | 30 July 00:00–23:59 | 1440 | (25.93, 36.59) °C | (4.24, 8.61) m/s |
| Cold wave | 24 Feberary 18:30–20:30 | 120 | (2.84, 16.32) °C | (15.63, 17.85) m/s |
| Criteria | Winter | Summer | Cold Wave | |||
|---|---|---|---|---|---|---|
| Method I | Method II | Method I | Method II | Method I | Method II | |
| MSE | 0.18 | 0.91 | 0.16 | 0.62 | 0.18 | 1.39 |
| MAE | 0.14 | 0.98 | 0.11 | 0.73 | 0.19 | 1.07 |
| MAPE (%) | 0.25 | 1.79 | 0.16 | 1.04 | 0.30 | 1.96 |
| Dataset | Start and End Time | Number of Data | Ambient Temperature | Wind Speed |
|---|---|---|---|---|
| Wind speed increase | 12 April 09:00–10:39 | 100 | (13.92, 15.01) °C | (4.64, 15.12) m/s |
| Wind speed decrease | 15 April 14:00–16:59 | 180 | (14.45, 15.89) °C | (3.97, 14.83) m/s |
| Criteria | Wind Speed Increase | Wind Speed Decrease | ||
|---|---|---|---|---|
| Method I | Method II | Method I | Method II | |
| MSE | 0.15 | 2.85 | 0.12 | 0.95 |
| MAE | 0.31 | 2.19 | 0.26 | 0.89 |
| MAPE (%) | 0.47 | 3.48 | 0.38 | 1.54 |
| Dataset | Start and End Time | Number of Data | Ambient Temperature | Wind Speed |
|---|---|---|---|---|
| Failure | 18 Mar 05:40–10:39 | 300 | (−5.58, 0.02) °C | (3.64, 17.86) m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, Z.; Lv, X.; Zhuang, S. Optimized Extreme Learning Machine-Based Main Bearing Temperature Monitoring Considering Ambient Conditions’ Effects. Energies 2021, 14, 7529. https://doi.org/10.3390/en14227529
Hou Z, Lv X, Zhuang S. Optimized Extreme Learning Machine-Based Main Bearing Temperature Monitoring Considering Ambient Conditions’ Effects. Energies. 2021; 14(22):7529. https://doi.org/10.3390/en14227529
Chicago/Turabian StyleHou, Zhengnan, Xiaoxiao Lv, and Shengxian Zhuang. 2021. "Optimized Extreme Learning Machine-Based Main Bearing Temperature Monitoring Considering Ambient Conditions’ Effects" Energies 14, no. 22: 7529. https://doi.org/10.3390/en14227529
APA StyleHou, Z., Lv, X., & Zhuang, S. (2021). Optimized Extreme Learning Machine-Based Main Bearing Temperature Monitoring Considering Ambient Conditions’ Effects. Energies, 14(22), 7529. https://doi.org/10.3390/en14227529