
MPPT Improvement for PMSG-Based Wind Turbines Using Extended Kalman Filter and Fuzzy Control System

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
- Improving the accuracy of the wind turbine MPPT implementation.
- Increasing the efficiency of the PMSG output power by estimating the generator speed.
- Estimating the unpredictable parameters by employing EKF in PMSG-based wind turbines to the best knowledge of the authors.
2. Proposed Method
- The PMSG-based wind turbine is directly driven, which makes it easily controllable.
- This VSWT has a slow rotation speed.
- It has high torque density and very low inertia, which makes it highly efficient.
- This type of VSWTs can be used without the gearbox.
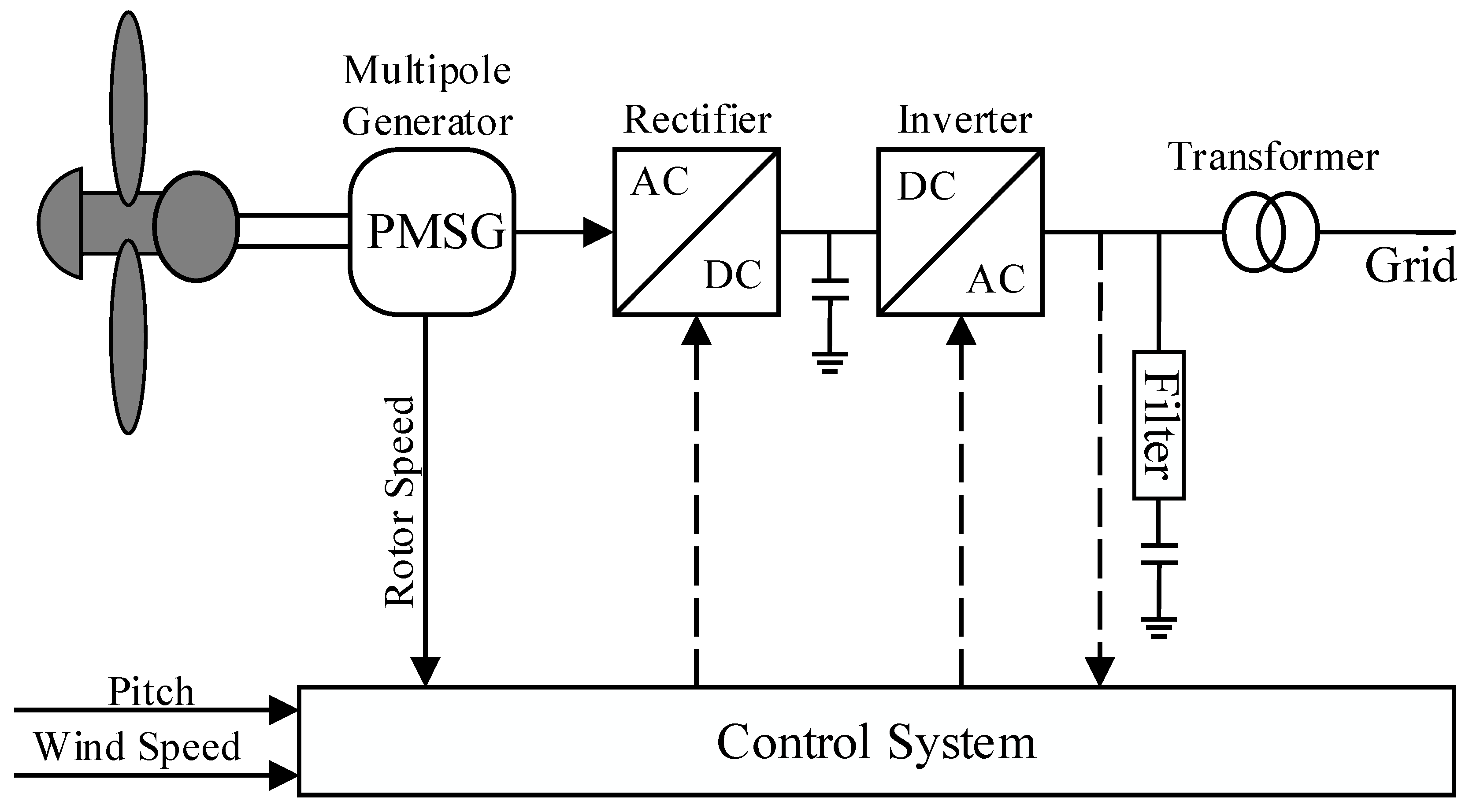
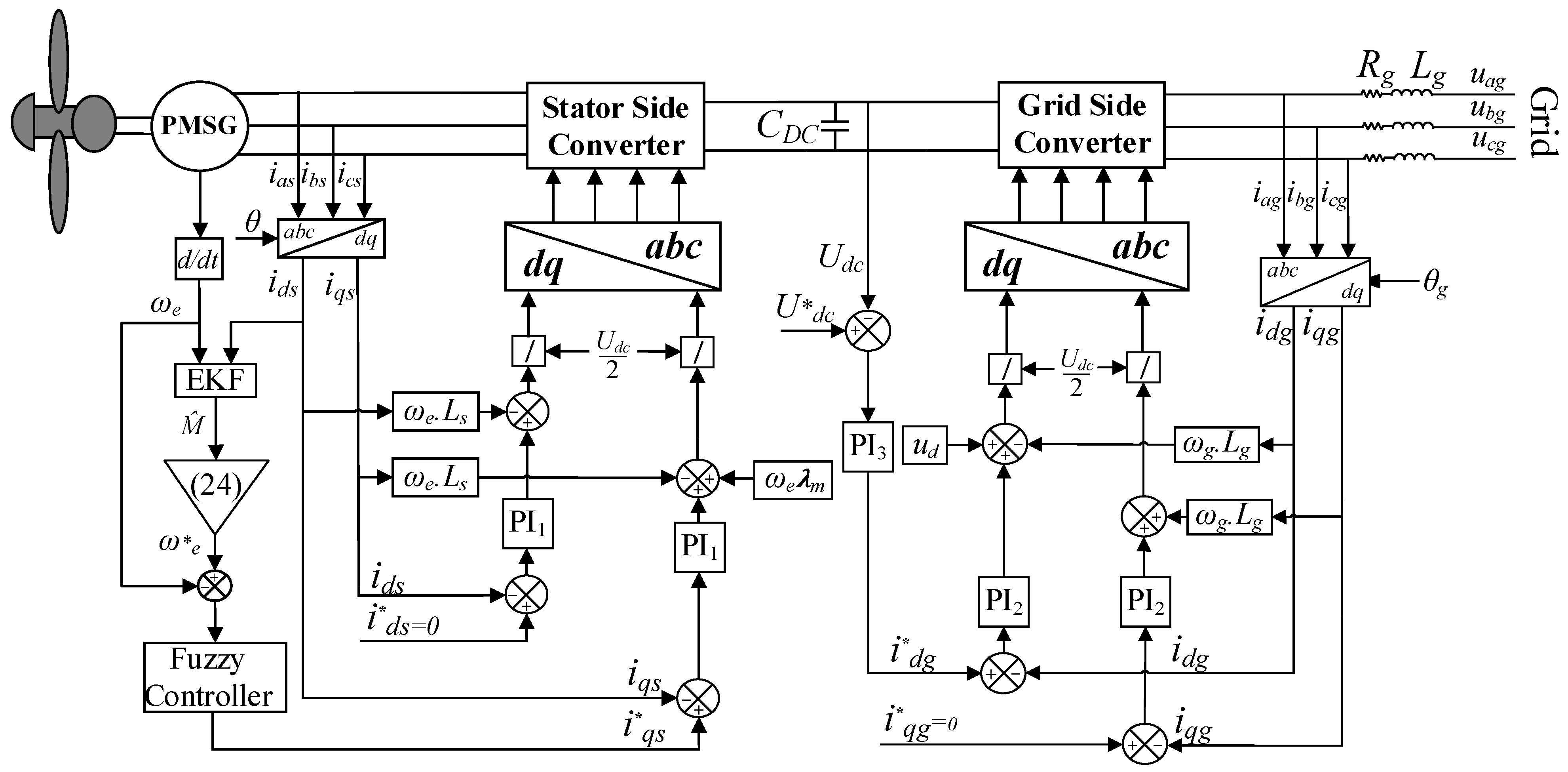
2.1. System Description
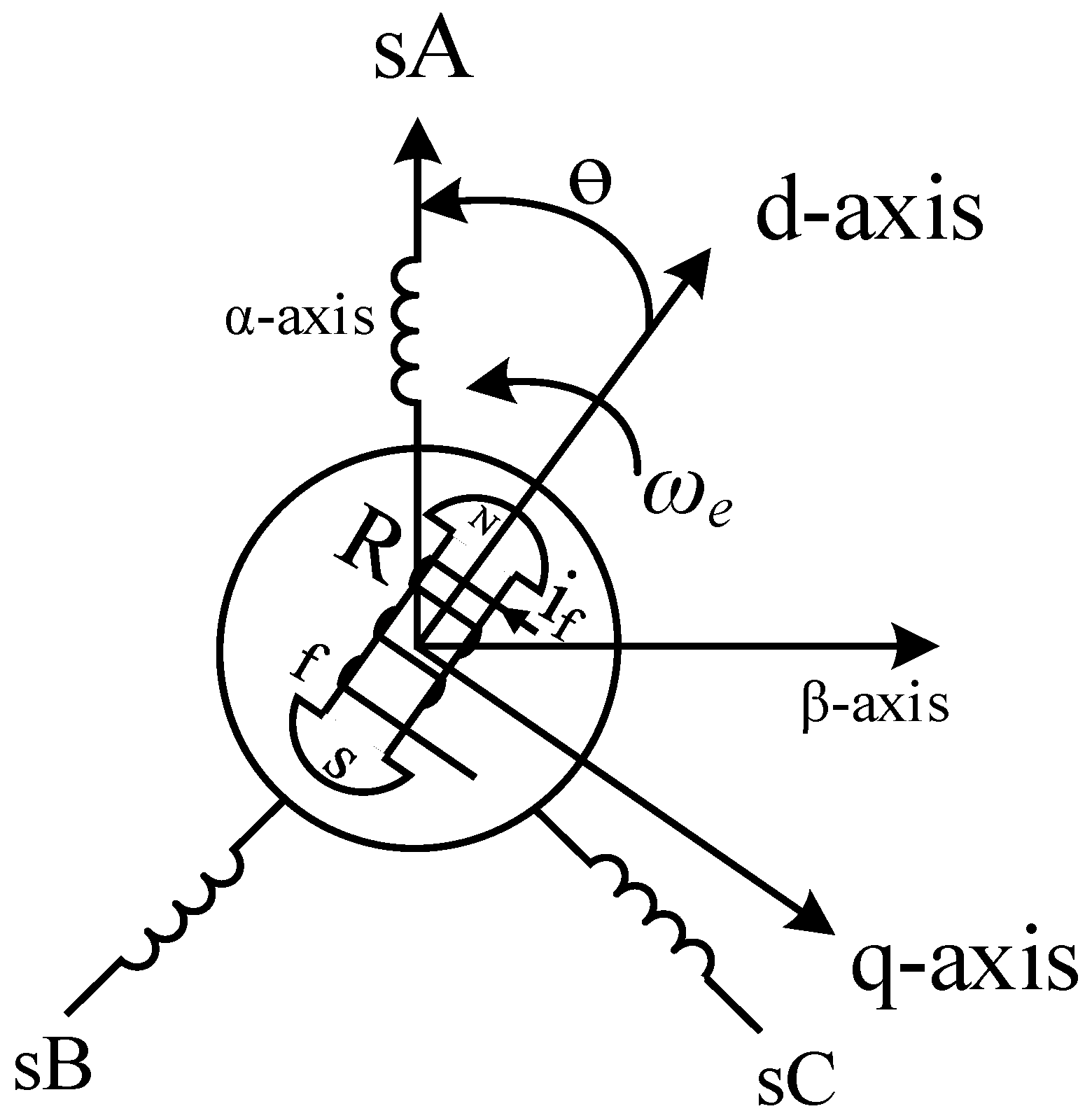
2.1.1. SSC Control
2.1.2. GSC Control
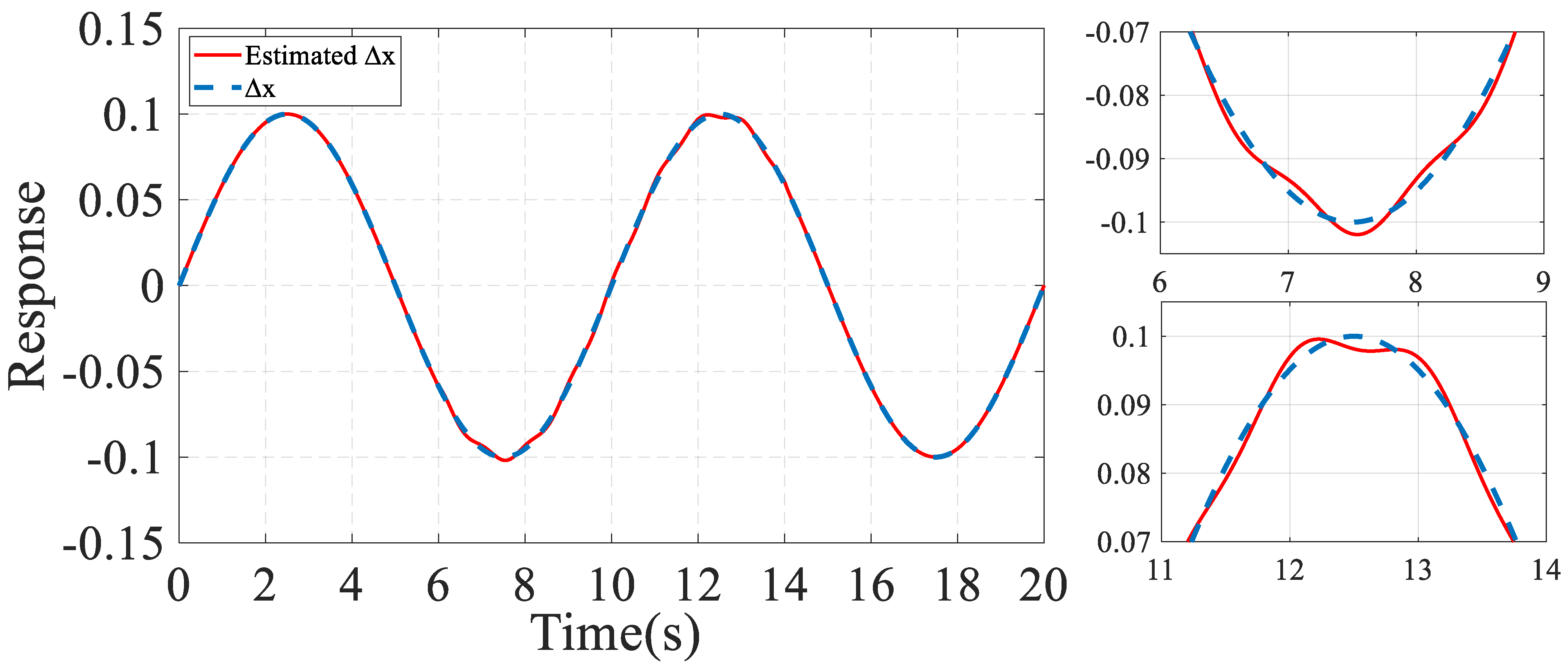
2.2. Parameter Estimation
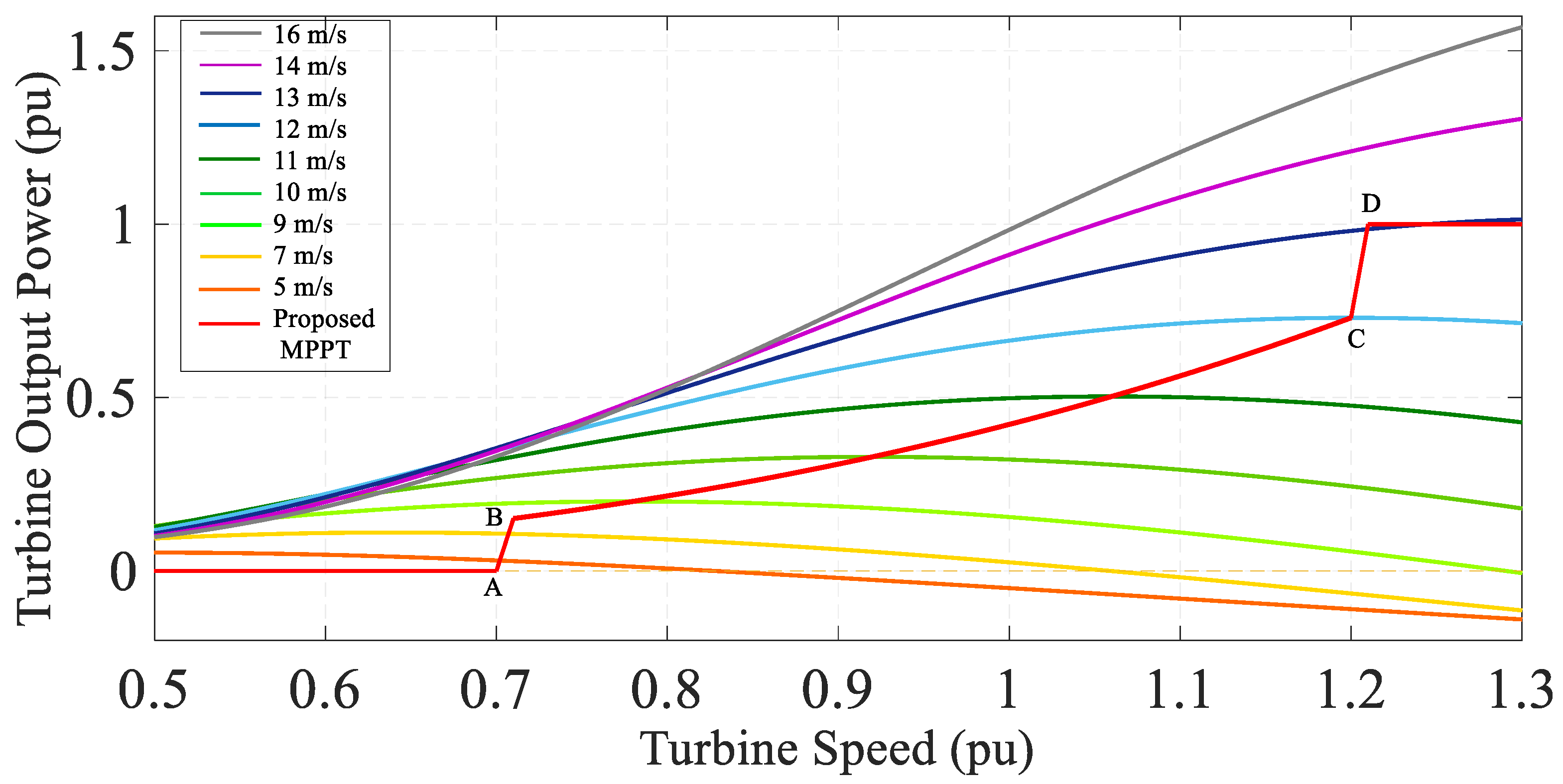
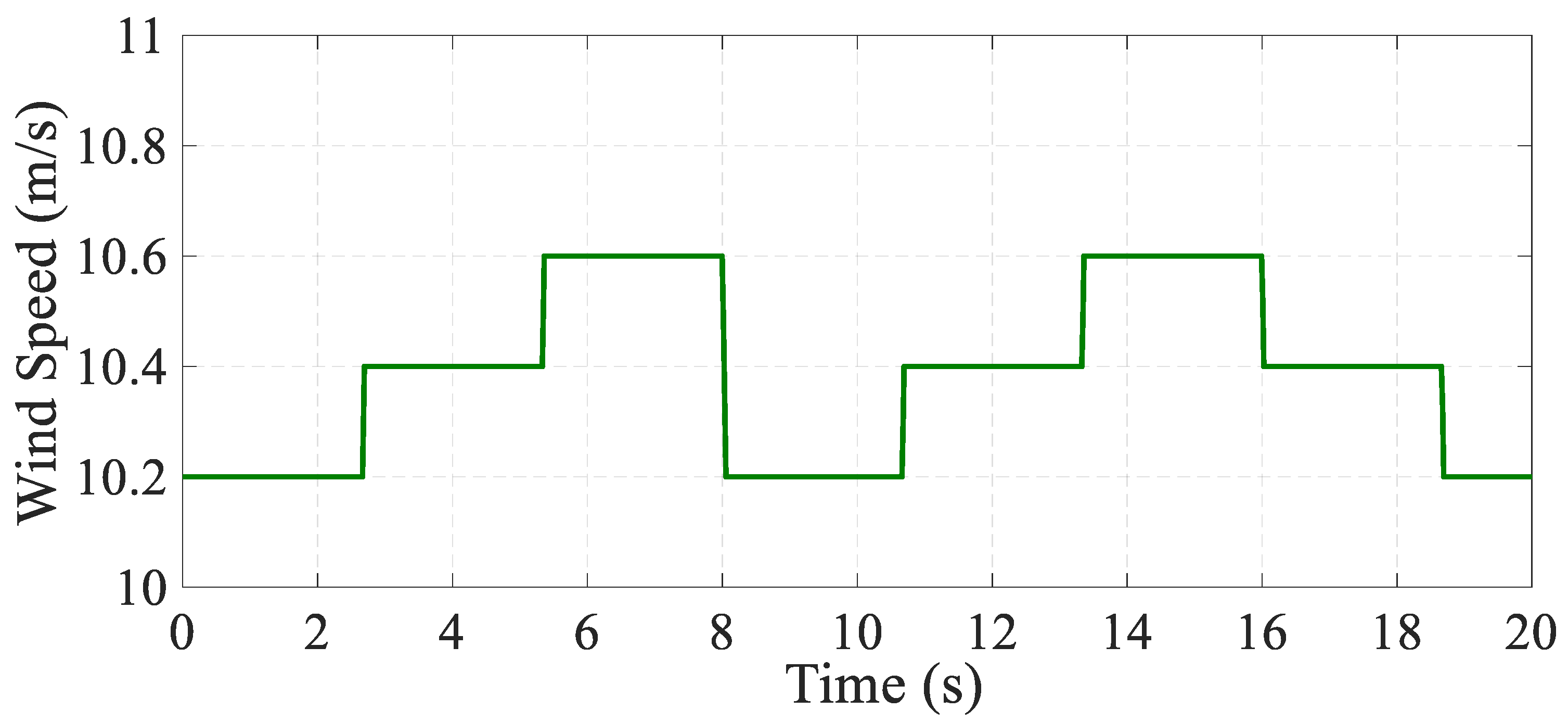
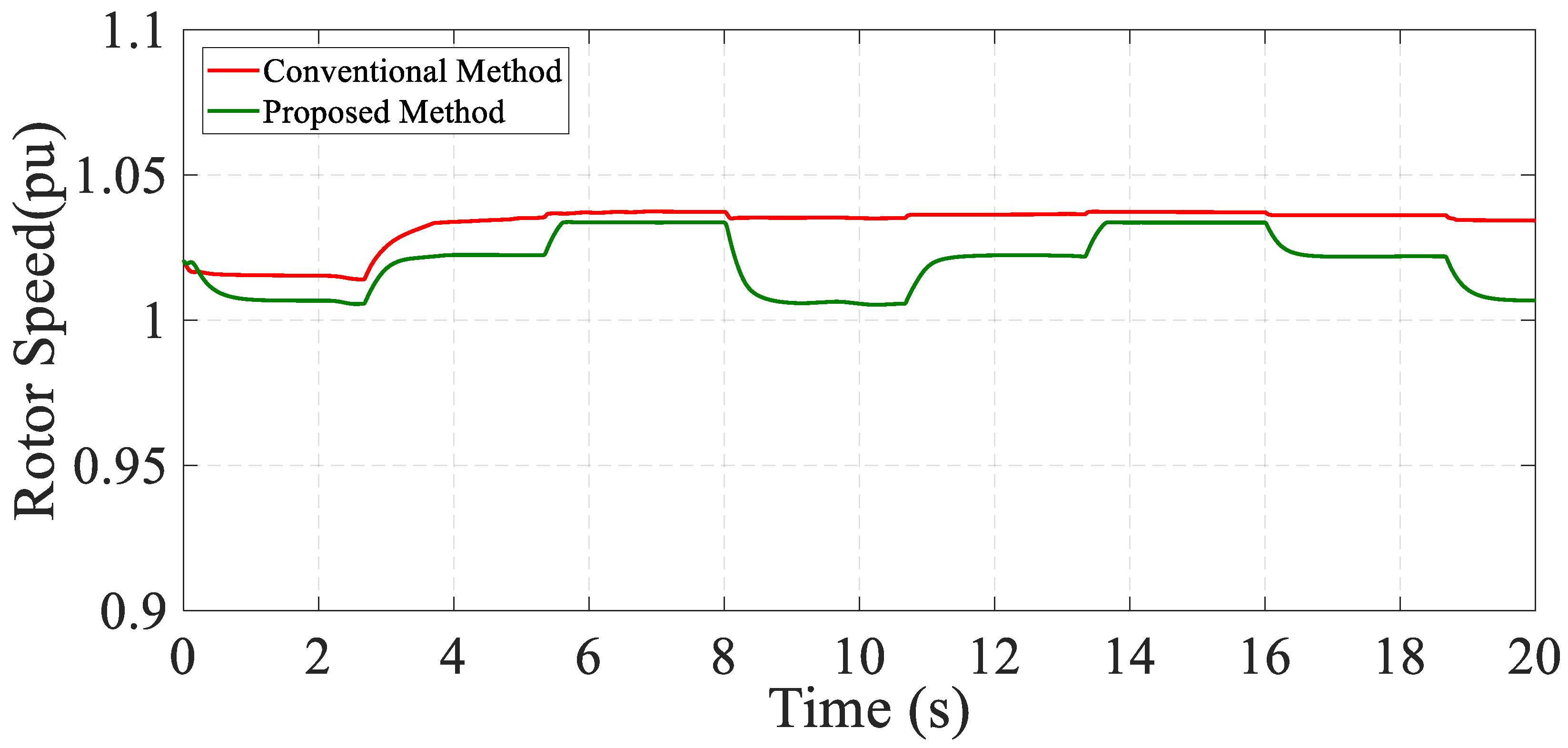
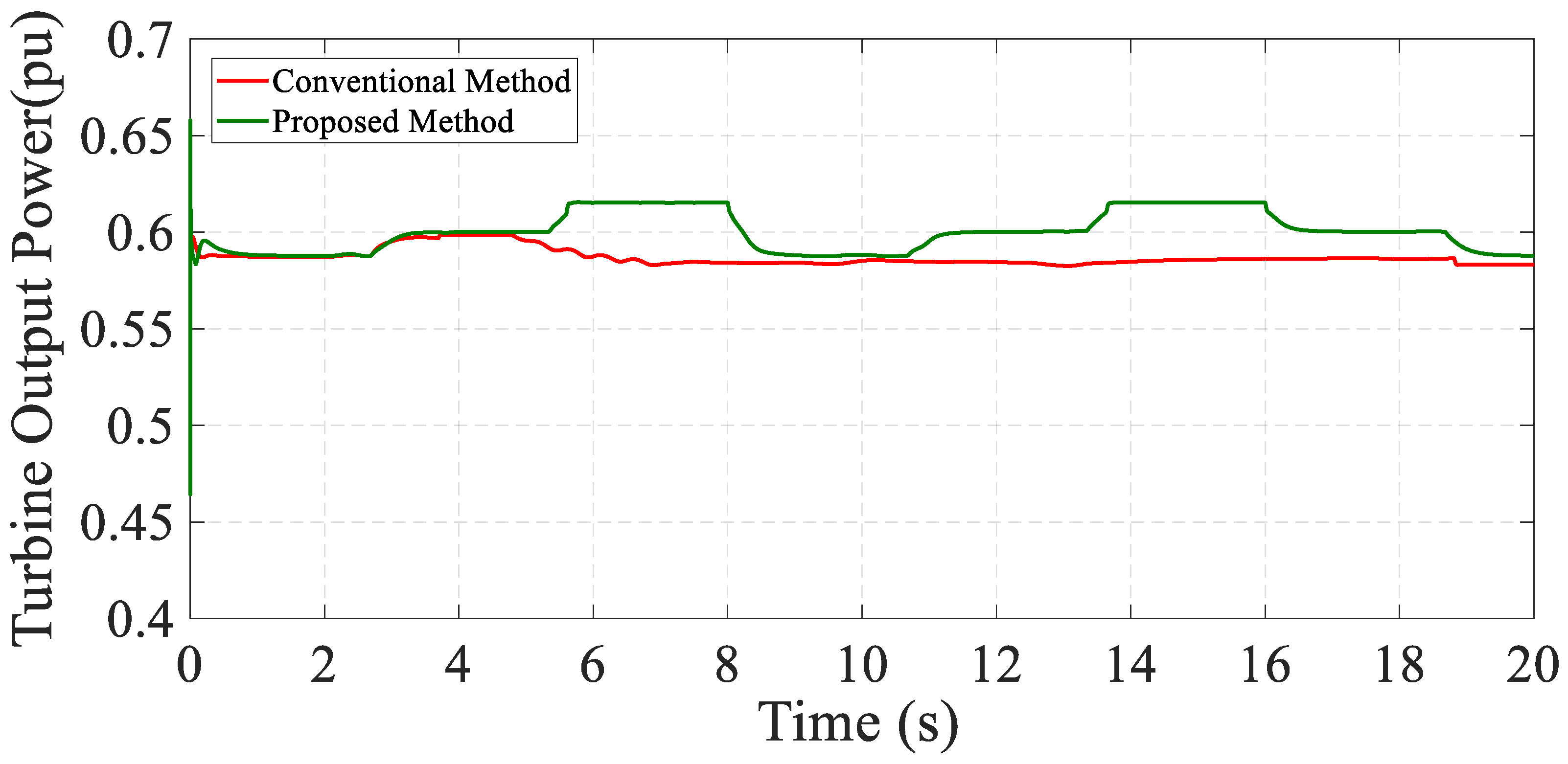
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yamakawa, C.K.; Qin, F.; Mussatto, S.I. Advances and opportunities in biomass conversion technologies and biorefineries for the development of a bio-based economy. Biomass Bioenergy 2018, 119, 54–60. [Google Scholar] [CrossRef]
- Honarbari, S.; Bidgoli, M.A. Designing a Quasi-Z-Source Inverter with Energy Storage to Improve Grid Power Quality. IETE J. Res. 2020, 1–9. [Google Scholar] [CrossRef]
- Zaboli, M.; Ajarostaghi, S.S.M.; Saedodin, S.; Pour, M.S. Thermal Performance Enhancement Using Absorber Tube with Inner Helical Axial Fins in a Parabolic Trough Solar Collector. Appl. Sci. 2021, 11, 7423. [Google Scholar] [CrossRef]
- Olfian, H.; Ajarostaghi, S.S.M.; Ebrahimnataj, M. Development on evacuated tube solar collectors: A review of the last decade results of using nanofluids. Sol. Energy 2020, 211, 265–282. [Google Scholar] [CrossRef]
- Roy, S.; Saha, U.K. Review on the numerical investigations into the design and development of Savonius wind rotors. Renew. Sustain. Energy Rev. 2013, 24, 73–83. [Google Scholar] [CrossRef]
- Javadi, H.; Urchueguia, J.F.; Ajarostaghi, S.S.M.; Badenes, B. Numerical Study on the Thermal Performance of a Single U-Tube Borehole Heat Exchanger Using Nano-Enhanced Phase Change Materials. Energies 2020, 13, 5156. [Google Scholar] [CrossRef]
- Javadi, H.; Urchueguia, J.; Ajarostaghi, S.M.; Badenes, B. Impact of Employing Hybrid Nanofluids as Heat Carrier Fluid on the Thermal Performance of a Borehole Heat Exchanger. Energies 2021, 14, 2892. [Google Scholar] [CrossRef]
- Alamian, R.; Shafaghat, R.; Amiri, H.A.; Shadloo, M.S. Experimental assessment of a 100 W prototype horizontal axis tidal turbine by towing tank tests. Renew. Energy 2020, 155, 172–180. [Google Scholar] [CrossRef]
- Bilandzija, N.; Voca, N.; Jelcic, B.; Jurisic, V.; Matin, A.; Grubor, M.; Kricka, T. Evaluation of Croatian agricultural solid biomass energy potential. Renew. Sustain. Energy Rev. 2018, 93, 225–230. [Google Scholar] [CrossRef]
- Ezoji, H.; Shafaghat, R.; Jahanian, O. Numerical simulation of dimethyl ether/natural gas blend fuel HCCI combustion to investigate the effects of operational parameters on combustion and emissions. J. Therm. Anal. Calorim. 2018, 135, 1775–1785. [Google Scholar] [CrossRef]
- Ezoji, H.; Ajarostaghi, S.S.M. Thermodynamic-CFD analysis of waste heat recovery from homogeneous charge compression ignition (HCCI) engine by Recuperative organic Rankine Cycle (RORC): Effect of operational parameters. Energy 2020, 205, 117989. [Google Scholar] [CrossRef]
- Wang, C.; Wang, L.; Shi, L.; Ni, Y. A Survey on Wind Power Technologies in Power Systems. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6. [Google Scholar]
- Lan, J.; Patton, R.J.; Zhu, X. Fault-tolerant wind turbine pitch control using adaptive sliding mode estimation. Renew. Energy 2018, 116, 219–231. [Google Scholar] [CrossRef]
- Gao, R.; Gao, Z. Pitch control for wind turbine systems using optimization, estimation and compensation. Renew. Energy 2016, 91, 501–515. [Google Scholar] [CrossRef]
- Wang, C.-N.; Lin, W.-C.; Le, X.-K. Modelling of a PMSG Wind Turbine with Autonomous Control. Math. Probl. Eng. 2014, 2014, 85617. [Google Scholar] [CrossRef]
- Geng, H.; Yang, G. Output Power Control for Variable-Speed Variable-Pitch Wind Generation Systems. IEEE Trans. Energy Convers. 2010, 25, 494–503. [Google Scholar] [CrossRef]
- Bianchi, F.; Mantz, R.; Christiansen, C. Gain scheduling control of variable-speed wind energy conversion systems using quasi-LPV models. Control Eng. Pract. 2005, 13, 247–255. [Google Scholar] [CrossRef]
- Stol, K.A.; Balas, M.J. Periodic Disturbance Accommodating Control for Blade Load Mitigation in Wind Turbines. J. Sol. Energy Eng. 2003, 125, 379–385. [Google Scholar] [CrossRef]
- Mohamed, A.Z.; Eskander, M.N.; Ghali, F.A. Fuzzy logic control based maximum power tracking of a wind energy system. Renew. Energy 2001, 23, 235–245. [Google Scholar] [CrossRef]
- Shi, F.; Patton, R. An active fault tolerant control approach to an offshore wind turbine model. Renew. Energy 2015, 75, 788–798. [Google Scholar] [CrossRef]
- Najafi-Shad, S.; Barakati, S.M.; Yazdani, A. An effective hybrid wind-photovoltaic system including battery energy storage with reducing control loops and omitting PV converter. J. Energy Storage 2020, 27, 101088. [Google Scholar] [CrossRef]
- Gliga, L.I.; Chafouk, H.; Popescu, D.; Lupu, C. Diagnosis of a Permanent Magnet Synchronous Generator using the Extended Kalman Filter and the Fast Fourier Transform. In Proceedings of the 2018 7th International Conference on Systems and Control (ICSC), Valencia, Spain, 24–26 October 2018; pp. 65–70. [Google Scholar]
- Afrasiabi, S.; Afrasiabi, M.; Rastegar, M.; Mohammadi, M.; Parang, B.; Ferdowsi, F. Ensemble Kalman Filter based Dynamic State Estimation of PMSG-based Wind Turbine. In Proceedings of the 2019 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 7–8 February 2019; pp. 1–4. [Google Scholar]
- Zhang, Z.; Wang, F.; Si, G.; Kennel, R. Predictive encoderless control of back-to-back converter PMSG wind turbine systems with Extended Kalman Filter. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar]
- Zerdali, E.; Yildiz, R.; Inan, R.; Demir, R.; Barut, M. Improved speed and load torque estimations with adaptive fading extended Kalman filter. Int. Trans. Electr. Energy Syst. 2021, 31, 12684. [Google Scholar] [CrossRef]
- Bagheri, A.; Ojaghi, M.; Bagheri, A. Air-gap eccentricity fault diagnosis and estimation in induction motors using unscented Kalman filter. Int. Trans. Electr. Energy Syst. 2020, 30, e12450. [Google Scholar] [CrossRef]
- Ortatepe, Z.; Karaarslan, A. Robust predictive sensorless control method for doubly fed induction generator controlled by matrix converter. Int. Trans. Electr. Energy Syst. 2020, 30, 12650. [Google Scholar] [CrossRef]
- Wu, Y.-T.; Liao, T.-L.; Chen, C.-K.; Lin, C.Y.; Chen, P.-W. Power output efficiency in large wind farms with different hub heights and configurations. Renew. Energy 2019, 132, 941–949. [Google Scholar] [CrossRef]
- Ribrant, J.; Bertling, L. Survey of failures in wind power systems with focus on Swedish wind power plants during 1997–2005. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–8. [Google Scholar]
- Odgaard, P.F.; Stoustrup, J.; Kinnaert, M. Fault-Tolerant Control of Wind Turbines: A Benchmark Model. IEEE Trans. Control Syst. Technol. 2013, 21, 1168–1182. [Google Scholar] [CrossRef] [Green Version]
- Shariatpanah, H.; Fadaeinedjad, R.; Rashidinejad, M. A New Model for PMSG-Based Wind Turbine with Yaw Control. IEEE Trans. Energy Convers. 2013, 28, 929–937. [Google Scholar] [CrossRef]
- Rosyadi, M.; Muyeen, S.M.; Takahashi, R.; Tamura, J. A Design Fuzzy Logic Controller for a Permanent Magnet Wind Generator to Enhance the Dynamic Stability of Wind Farms. Appl. Sci. 2012, 2, 780–800. [Google Scholar] [CrossRef] [Green Version]
- Mehrzad, D.; Luque, J.; Cuenca, M.C. Vector Control of PMSG for Grid-Connected Wind Turbine Applications. Master’s Thesis, Institute of Energy Technology, Alborg University, Aalborg, Denmark, 2009. [Google Scholar]
- Gao, D.W. Energy Storage for Sustainable Microgrid; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Wan, E.A.; van der Merwe, R.; Nelson, A.T. Advances in Neural Information Processing Systems 12, Ch. Dual Estimation and the Unscented Transformation; MIT Press: Cambridge, MA, USA, 2000; pp. 666–672. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| y | x1 | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | Z | PS | PM | PB | ||
| x2 | NB | NB | NB | NM | NM | NS | NS | Z |
| NM | NB | NM | NM | NS | NS | Z | PS | |
| NS | NM | NM | NS | NS | Z | PS | PS | |
| Z | NM | NS | NS | Z | PS | PS | PM | |
| PS | NS | NS | Z | PS | PS | PM | PM | |
| PM | NS | Z | PS | PS | PM | PM | PB | |
| PB | Z | PS | PS | PM | PM | PB | PB | |
| Fuzzy Sets Labels | Fuzzy Sets |
|---|---|
| NB | Negative Big |
| NM | Negative Medium |
| NS | Negative Small |
| ZR | Zero |
| PS | Positive Small |
| PM | Positive Medium |
| PB | Positive Big |
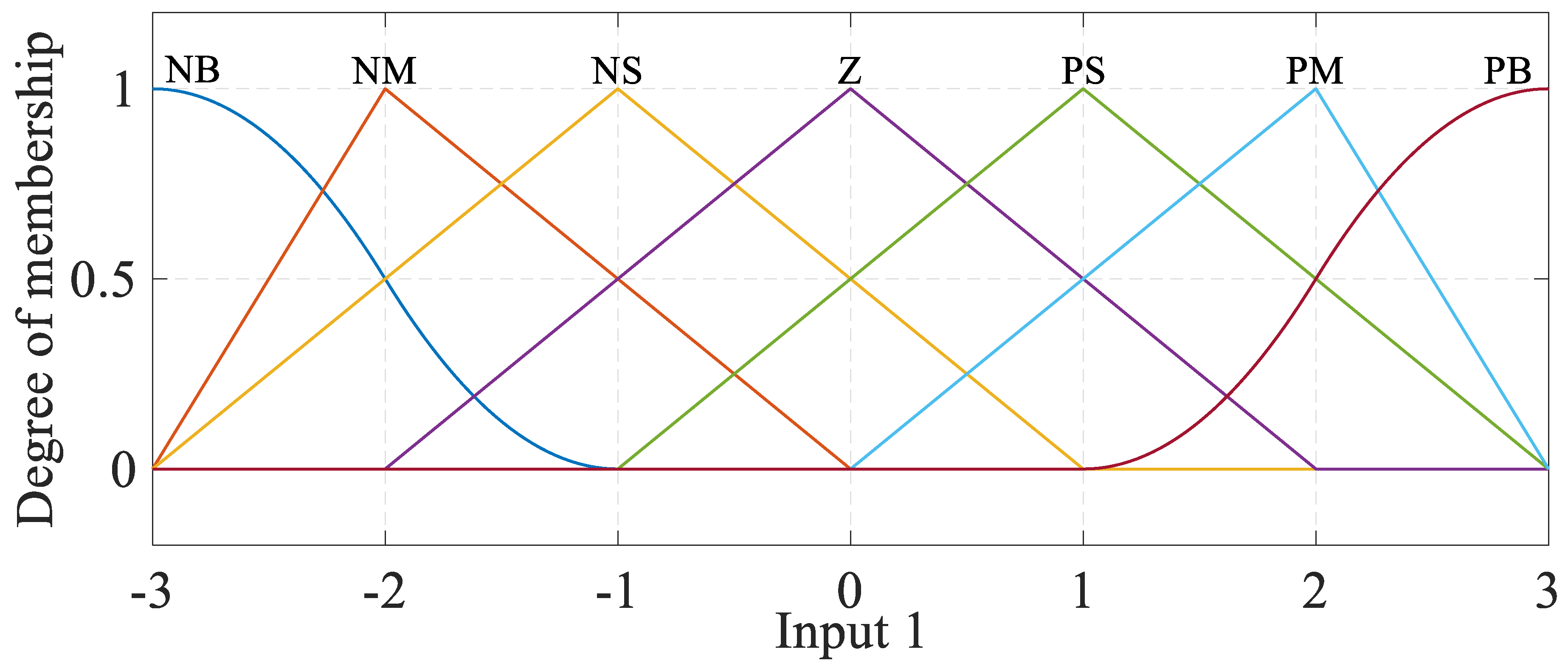
| Membership Function Type | Fuzzy Sets Labels | Fuzzy Numbers |
|---|---|---|
| zmf | NB | [−3k1, −k1] |
| trimf | NM | [−3k1, −2k1, 0] |
| trimf | NS | [−3k1, −k1, k1] |
| trimf | Z | [−2k1, 0, 2k1] |
| trimf | PS | [−k1, k1, 3k1] |
| trimf | PM | [0, 2k1, 3k1] |
| zmf | PB | [k1, 3k1] |
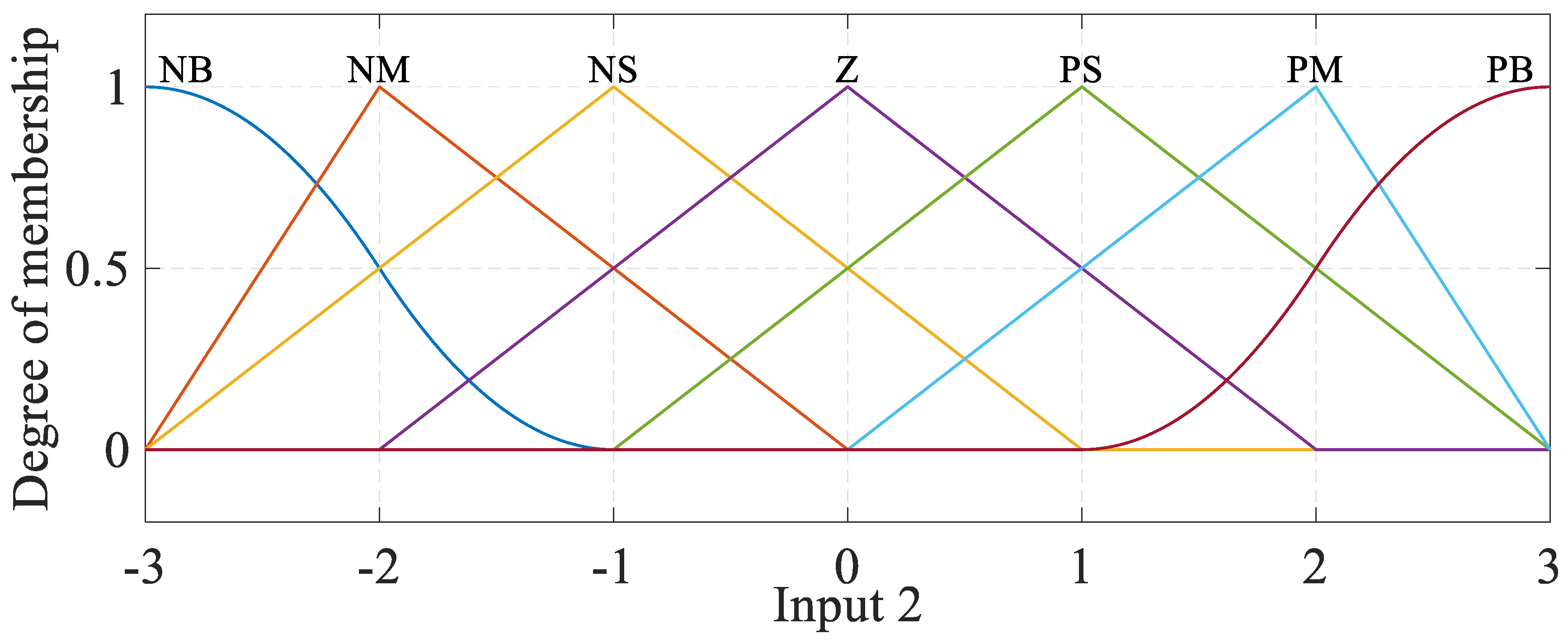
| Membership Function Type | Linguistic Variables | Fuzzy Numbers |
|---|---|---|
| zmf | NB | [−3k1, −k1] |
| trimf | NM | [−3k1, −2k1, 0] |
| trimf | NS | [−3k1, −k1, k1] |
| trimf | Z | [−2k1, 0, 2k1] |
| trimf | PS | [−k1, k1, 3k1] |
| trimf | PM | [0, 2k1, 3k1] |
| zmf | PB | [k1, 3k1] |
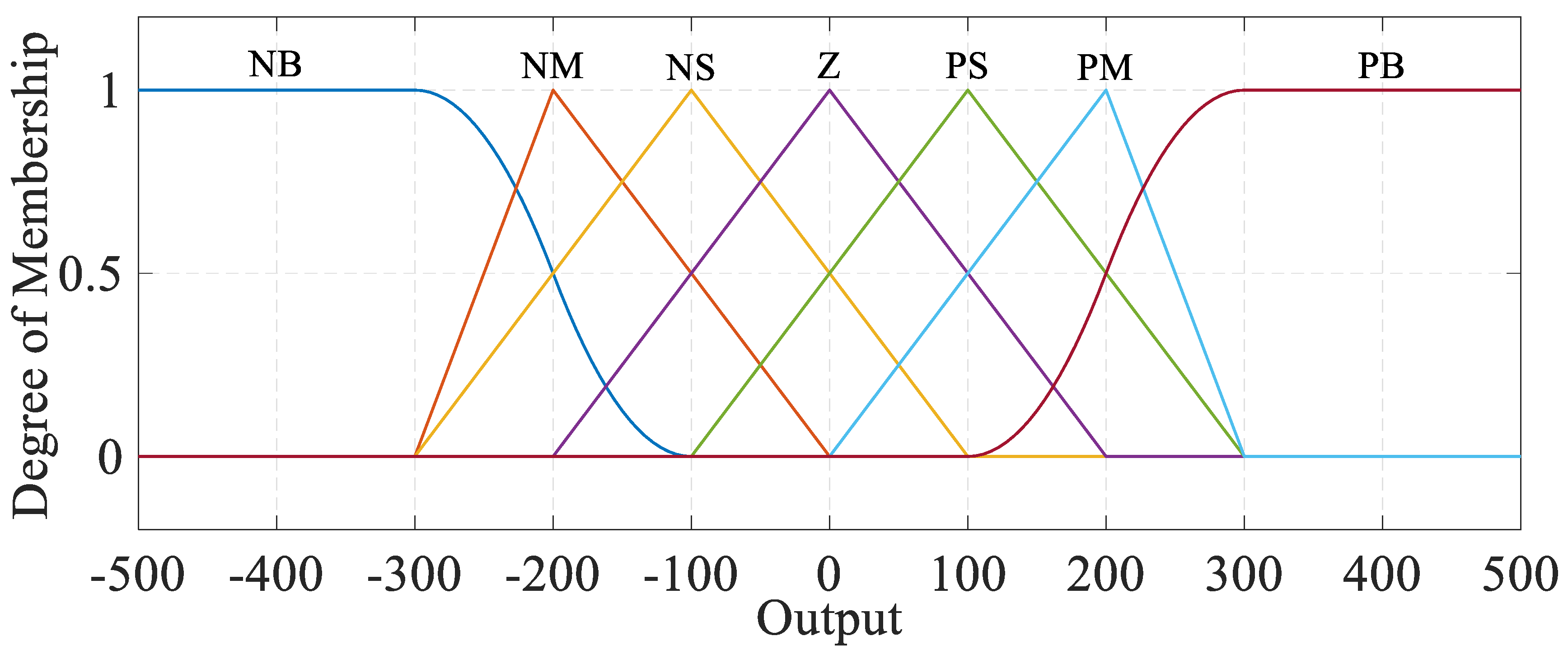
| Membership Function Type | Linguistic Variables | Fuzzy Numbers |
|---|---|---|
| zmf | NB | [−3k3, −k3] |
| trimf | NM | [−3k3, −2k3, 0] |
| trimf | NS | [−3k3, −k3, k3] |
| trimf | Z | [−2k3, 0, 2k3] |
| trimf | PS | [−k3, k3, 3k3] |
| trimf | PM | [0, 2k3, 3k3] |
| zmf | PB | [k3, 3k3] |
| Parameters | Value |
|---|---|
| Turbine Nominal Power | 900 kW |
| Nominal Voltage | 20 kV |
| Nominal Frequency | 60 Hz |
| Number of Pole Pairs (P) | 4 |
| Stator Resistance (Rs) | 25 mΩ |
| Stator Inductance (Ls) | 5 mH |
| DC-link Capacitance (C) | 2.5 mf |
| GSC Resistance (Rg) | 15 m Ω |
| GSC Inductance (Lg) | 0.2 mH |
| Switching Frequency | 1590 Hz |
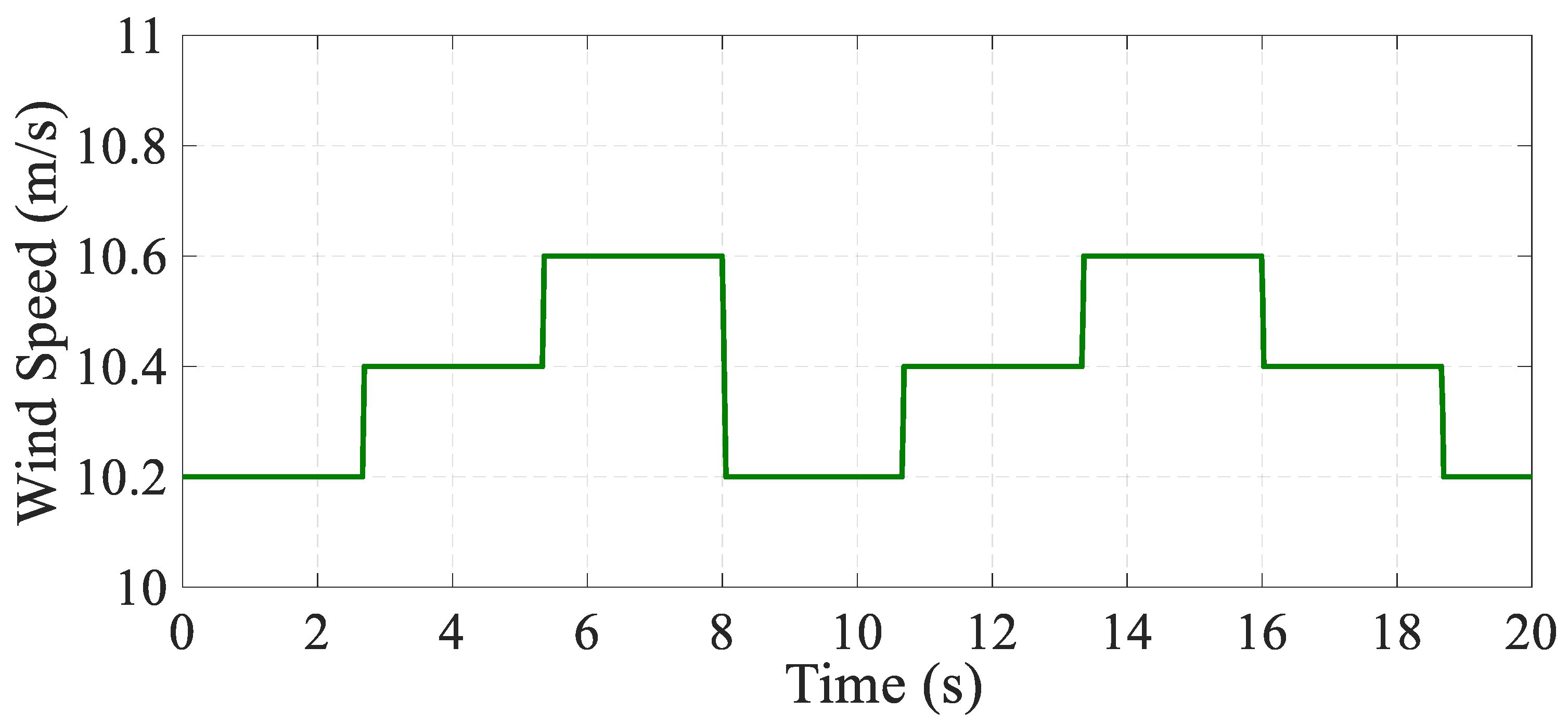
| Wind Speed | 5 to 16 m/s |
| SSC Controller (PI1) | |
| GSC Current Controller (PI2) | |
| GSC Voltage Controller (PI3) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Honarbari, A.; Najafi-Shad, S.; Saffari Pour, M.; Ajarostaghi, S.S.M.; Hassannia, A. MPPT Improvement for PMSG-Based Wind Turbines Using Extended Kalman Filter and Fuzzy Control System. Energies 2021, 14, 7503. https://doi.org/10.3390/en14227503
Honarbari A, Najafi-Shad S, Saffari Pour M, Ajarostaghi SSM, Hassannia A. MPPT Improvement for PMSG-Based Wind Turbines Using Extended Kalman Filter and Fuzzy Control System. Energies. 2021; 14(22):7503. https://doi.org/10.3390/en14227503
Chicago/Turabian StyleHonarbari, Amirsoheil, Sajad Najafi-Shad, Mohsen Saffari Pour, Seyed Soheil Mousavi Ajarostaghi, and Ali Hassannia. 2021. "MPPT Improvement for PMSG-Based Wind Turbines Using Extended Kalman Filter and Fuzzy Control System" Energies 14, no. 22: 7503. https://doi.org/10.3390/en14227503
APA StyleHonarbari, A., Najafi-Shad, S., Saffari Pour, M., Ajarostaghi, S. S. M., & Hassannia, A. (2021). MPPT Improvement for PMSG-Based Wind Turbines Using Extended Kalman Filter and Fuzzy Control System. Energies, 14(22), 7503. https://doi.org/10.3390/en14227503