1. Introduction
The IPMSM has high power density and torque density, which is widely used as an EV powertrain. The large amount of heat as a byproduct causes a significant temperature rise in the motor. Therefore, it is necessary to accurately predict the motor temperature distribution in advance.
A lumped-parameter thermal network (LPTN) model is always used to predict the node temperature of various electric machines. Transient temperature rises of part nodes are calculated by solving differential equations [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10].
A full-order LPTN model was built in [
1,
2]. The LPTN model, combining electromagnetic finite-element analysis (FEA) with a thermal resistance network, is built based on the law of heat flux balance in two continuous iterative calculations [
1]. The steady-state and transient-state solution of the LPTN model are solved numerically with the fourth-order Runge–Kutta method and the Gauss–Seidel method to predict the temperatures of a 7.5 kW induction machine [
2].
A low computational cost thermal model with order reduction is built for the online prediction of the winding temperature of PMSMs. A set of experimental measure temperatures from direct current (DC) tests is used for calibrating the generic thermal model of induction machines. At the same time, several duty cycles are considered in [
3,
4,
5,
6,
7].
An infrared thermal imager was adopted to validate surface temperature distribution [
8,
9]. A convective heat transfer coefficient has a big impact on the temperature rise of the machine [
10,
11,
12]. The heat transfer coefficient is deduced theoretically in [
8], analyzed by a coupled electromagnetic and thermal model in [
9] or evaluated by the average Nusselt number in the stator channels between adjacent teeth [
10]. The steady-state thermal network analysis and experiment of a 25 kW IPMSM with “—” type PM per pole was finished in [
13].
Although the above studies have carried out a lot of valuable work in predicting the temperature rise of nodes, some aspects still need improvement as follows.
A complex steady or transient LPTN needs to calculate many geometric and thermal parameters, such as heat capacity, thermal resistance and power loss. In order to reduce the computation burden, it is necessary to analyze a reduced-order model. A full LPTN model usually consists of basic first-order transient thermal network elements. Differences in the type of thermal network unit and factors influencing its temperature rise are not analyzed. In addition, the change in node temperature rise under complicated conditions is seldom discussed in the above studies.
In this paper, thermal resistance value is comparatively calculated for the “H”, “+” and “I” types of LPTN units. The first-order LPTN is studied using the exponential decay function and the exponential iteration method. A multi-order transient LPTN method of the IPMSM is derived, which takes constant load and rectangular periodic load into account. The exponential decay fit function from the first order to the third order is used to match the measured temperature curve of stator winding. Finally, an IPMSM prototype with a 48-slot/8-pole combination is manufactured and tested. A load experiment is set up under the condition of multiple load cases. Winding temperature, phase current waves, efficiency map and infrared thermal image are measured using the dynamometer platform.
2. Thermal Resistance Calculation of Thermal Network Unit
Based on three types of thermal network unit, namely “H”, “+” and “I” type, the exponential decay function method and the exponential decay iteration method are deduced. The two methods are used to calculate the first-order LPTN. For a given constant power loss and total heat flux, the bigger the convection heat transfer coefficient value, the lower the steady-state temperature of the yoke iron core. The geometry parameters of a general hollow cylinder and its unfolded brick are given in
Figure 1. It also considers different heat source locations relative to the center of mass [
14]. The definitions of the parameters are given in
Figure 1.
Thermal network units of “H” type, “+” type and “I” type are adapted to the geometric shape of torus and brick. Thermal network units of “H” type, “+” type and “I” type define thermal resistance, thermal capacitance, and power loss, which are shown in
Figure 2a–c, respectively.
Heat resistance
Rcond is the inverse of heat conductance
Gcond, which is given by [
14]
where
l is the length in the direction of thermal conductivity (m),
λ is the coefficient of thermal conduction (W/m·K) and
Asec is the cross-section perpendicular to the direction of thermal conduction (m
2).
The equivalent thermal conductance
Gmat1,2 of two kinds of materials with or without assembly clearance is considered as follows [
14].
where
Gair is the thermal conductance of air.
2.1. Thermal Network Unit of “H” Type
The thermal network unit of “H” type includes radial and axial thermal resistance (
R1r,
R2r,
R1a,
R2a), which are given in
Figure 2a and
Table 1.
2.2. Thermal Network Unit of “+” Type
The thermal network unit definition of “+” type includes radial and axial thermal resistance (
R1r,
R2r,
R1a,
R2a), as shown in
Figure 2b. We assume here that heat source location coincides with a center of mass. Here, middle radius is given as
rm = (
r1 +
r2)/2. Its thermal resistance is calculated in
Table 2.
2.3. Thermal Network Unit of “I” Type
The thermal network unit definition of “I” type only includes radial thermal resistance, which are
R1r and
R2r, as given in
Figure 2c and
Table 3.
Take stator yoke iron core as example; its dimensions are
Φyo_o×
Φyo_i×
Lef: 208 × 178 × 120 (mm). According to theoretical equations of thermal resistance unit in
Table 1,
Table 2 and
Table 3, the calculation results of three kinds of thermal network unit are given in
Table 4.
Due to radial thermal conductivity λr = 45 W/(m·K) being much larger than axial thermal conductivity λa = 4.5 W/(m·K), radial resistance Rr is much less than axial resistance Ra. For the thermal network unit of the stator iron core and rotor iron core, heat transfer in the axial direction may be negligible. Therefore, we can approximately substitute “I” type for “H” type and “+” type, which can obviously reduce matrix size and computational burden.
3. Transient Thermal Network Method of First Order
In this section, a multi-node LPTN model of IPMSM is established based on the “+” type of thermal network unit. A heat capacity matrix, thermal conductivity matrix and node loss matrix of LPTN are established. A first-order, non-homogeneous linear differential equation is solved through discretization, and the temperature rise curves of each node changing with time step iteration are obtained. Operating conditions considering copper resistivity variation are analyzed based on the LPTN.
3.1. First-Order Transient LPTN Theory
Thermal flux
qsec (heat flow intensity) through the unit section area (W/m
2) is given as
where
h is the convection heat transfer coefficient (W/m
2·°C),
Tact is the actual temperature of the steady state (°C),
T0 is ambient temperature(°C) and
d is thickness in the direction of heat conduction (m).
Thermal flux
qsec through cross-sectional area
Asec is a constant. It eventually reaches the steady-state temperature (generated heat equals dissipated heat) by convection, as shown in
where
Asec is the outer circumferential surface area of the stator yoke iron core (m
2).
The temperature rise
T(
t) is described by an exponential decay function as below.
where
Req is equivalent thermal resistance (
Req =
Rcond +
Rconv) and
Ceq is equivalent thermal capacity (
Ceq =
C).
It is assumed that the stator yoke core generates a continuous power loss of
Psta_yo = 410 W (heat source
Psta_yo is constant) and is dissipated by a single end face. If the LPTN unit is composed of a single heat source, its thermal resistance and thermal capacity are as shown in
Figure 3a. The heat is transferred in a single direction, and its corresponding first thermal network is defined in
Figure 3b. The heat transfer process is defined from one end face to another, which leads to a temperature rise (
Tact-
T0) in the yoke iron core. Similarly, the first-order model and its thermal network with air clearance are given in
Figure 4a,b.
If an end face has convection with the ambient air, thermal-convection resistance Rconv should be connected with thermal-conduction resistance Rcond in series. The smaller the convective thermal resistance, the stronger the convective heat transfer ability; the range covers air cooling to water cooling. The more heat is dissipated to the ambient air, the lower the temperature rise of the cuboid itself. If there is no convective thermal resistance Rconv to the ambient air, the boundary of the cuboid is an isothermal boundary, which reaches the limits of the thermal convection capacity.
When the convective heat transfer coefficient α takes different values with or without assembly clearance (
hac = 0.03 mm), the transient temperature curve with time is obtained, as shown in
Figure 5. For the given stator yoke loss (
Psta_yo = 410 W), the time of reaching the node steady temperature depends on the cooling ability of heat dissipation to the ambient air and thermal resistance along the heat transfer path. In other words, the increase in heat transfer convection coefficient α and the decrease in assembly clearance help to reduce the node temperature rise and shorten the time to reach the steady state (about 2500 s).
3.2. Multi-Order LPTN Theory
The transient temperature rise can be solved by the following differential equation.
where the part density
ρ, part volume
V, part mass
m, specific heat capacity
c and thermal capacity
C are nxn diagonal matrixes, respectively. Δ
T is the column vector of the temperature difference value.
Q(
t) is the quantity of heat and
P(
t) is the power loss of part node (W).
G is the nxn thermal conductivity symmetric matrix (W/°C).
T is the column vector of temperature rise (°C).
If the change in resistivity caused by temperature rise is considered, the loss matrix
P(
t) should update in every time step. The change rate of the temperature rise matrix can be obtained by solving the first-order inhomogeneous differential equation
T(
t).
The general solution of the first-order inhomogeneous differential equation is the sum of the general solution of the corresponding homogeneous linear equation and a particular solution of the inhomogeneous linear equation, where the constant term of the general solution of the homogeneous linear equation is
Ccon =
T(
t0).
The continuous equation in (10) is discretized with (11). At time (
n + 1)Δ
t and
nΔ
t, the temperature relation between
T[(
n + 1) Δ
t] and
T(
nΔ
t) is given by
The actual temperature
Tact(
nΔ
t) of each node is the sum of the ambient temperature
Tamb and the node temperature rise
T(
nΔ
t).
When the convergence criterion (
T(
n + 1) Δ
t −
T(
n) Δ
t)/
T(
n + 1)Δ
t <
ε is satisfied, the iteration process is terminated. We assume
nmaxΔ
t−
τ is equal to
u. The steady-state temperature rise calculation is simplified as
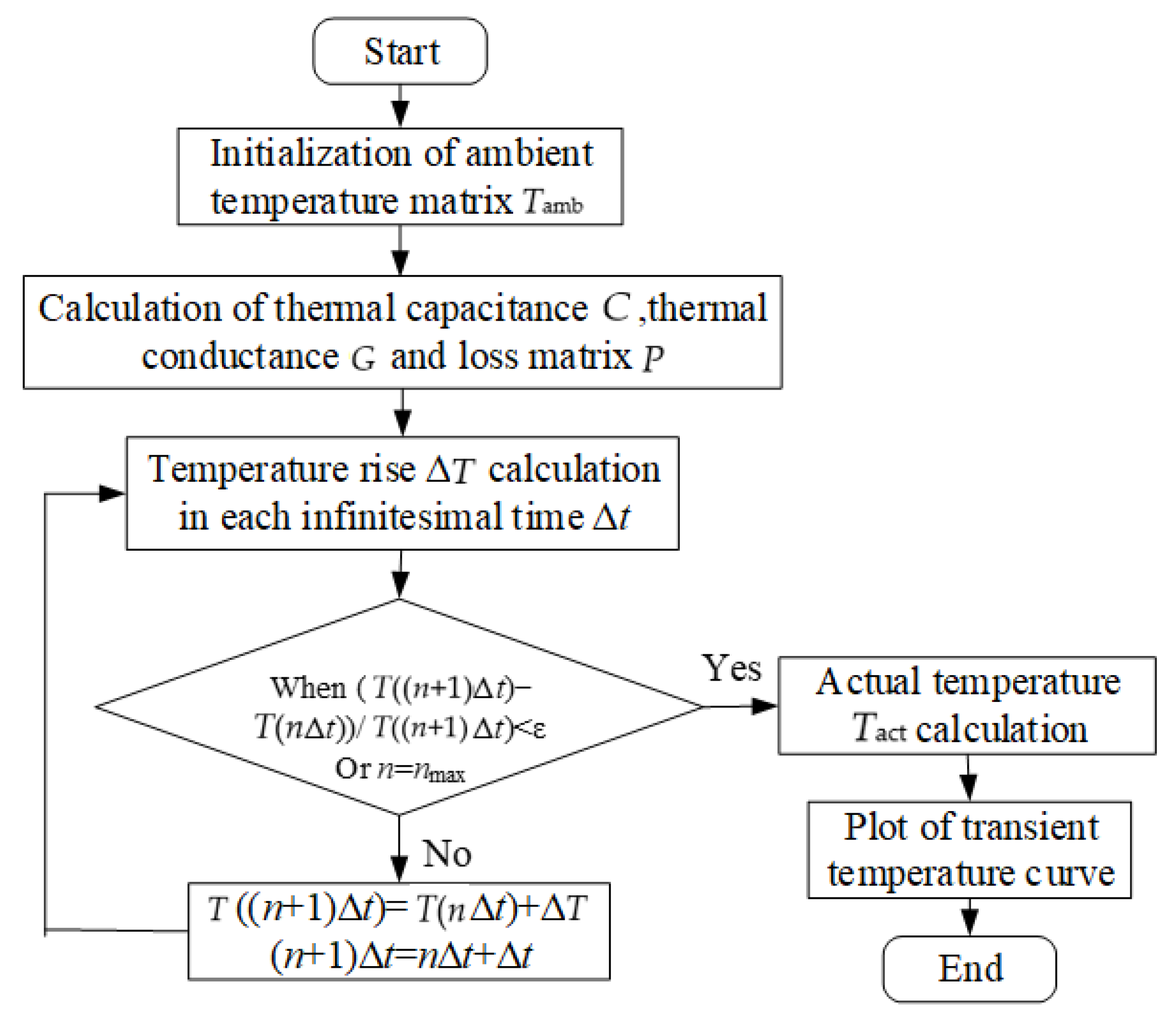
According to Equations (7)–(13), the flow chart of the transient temperature rise calculation of IPMSM is given in
Figure 6. The flow chart also describes the change process from ambient temperature
Tamb to steady-state temperature
Tmax.
4. Transient Thermal Network of IPMSM
A half 40 kW IPMSM model and LPTN of temperature node distribution are built for its axial symmetry in
Figure 7a,b in this paper. For the transient thermal network model, the IPMSM model is divided into the following 14 parts: (1) outer shell, (2) inner shell, (3) stator yoke, (4) stator tooth, (5) slotted winding, (6) end winding, (7) rotor shoe, (8) PM, (9) rotor yoke, (10) shaft, (11) end cap, (12) bearing, (13)–(14) inner air, (a), (c), (d) ambient air and (b) water.
Main heat generated by losses is taken away by circulating coolant in the shell. Therefore, the shell is divided into the outer shell (1# node) and the inner shell (2# node) considering heat convection. Due to the flux density difference between the stator tooth (3# node) and the stator yoke (4# node), losses of stator tooth and stator yoke are considered separately. Similarly, rotor iron loss falls into the rotor shoe (7# node) loss and the rotor yoke (9# node) loss. The winding is divided into slotting winding (5# node) and end windings (6# node). The end cap (11# node) and the shaft (10# node) are regarded as single non-heat source nodes. The wind friction loss is exerted on the rotor shoe (7# node). Loss values for the heat generation are applied to heat source nodes of the IPMSM.
For the non-heat source nodes, thermal capacity and thermal resistance connected with adjacent nodes are considered. For the heat source nodes, thermal capacity, power loss and thermal resistance are considered. The transient thermal network model is given in detail in
Figure 7b.
The main parameters of IPMSM are given in
Table 5. Loss values for the heat generation are applied to the IPMSM parts. Loss values at rated load and node number are also given in
Table 6 for the volume heat generation of IPMSM parts.
5. Load Case Analysis and Experiment
Transient temperature rise considering actual copper resistivity and intermittent condition is analyzed in this section.
5.1. Consant Load Considering Copper Resistivity
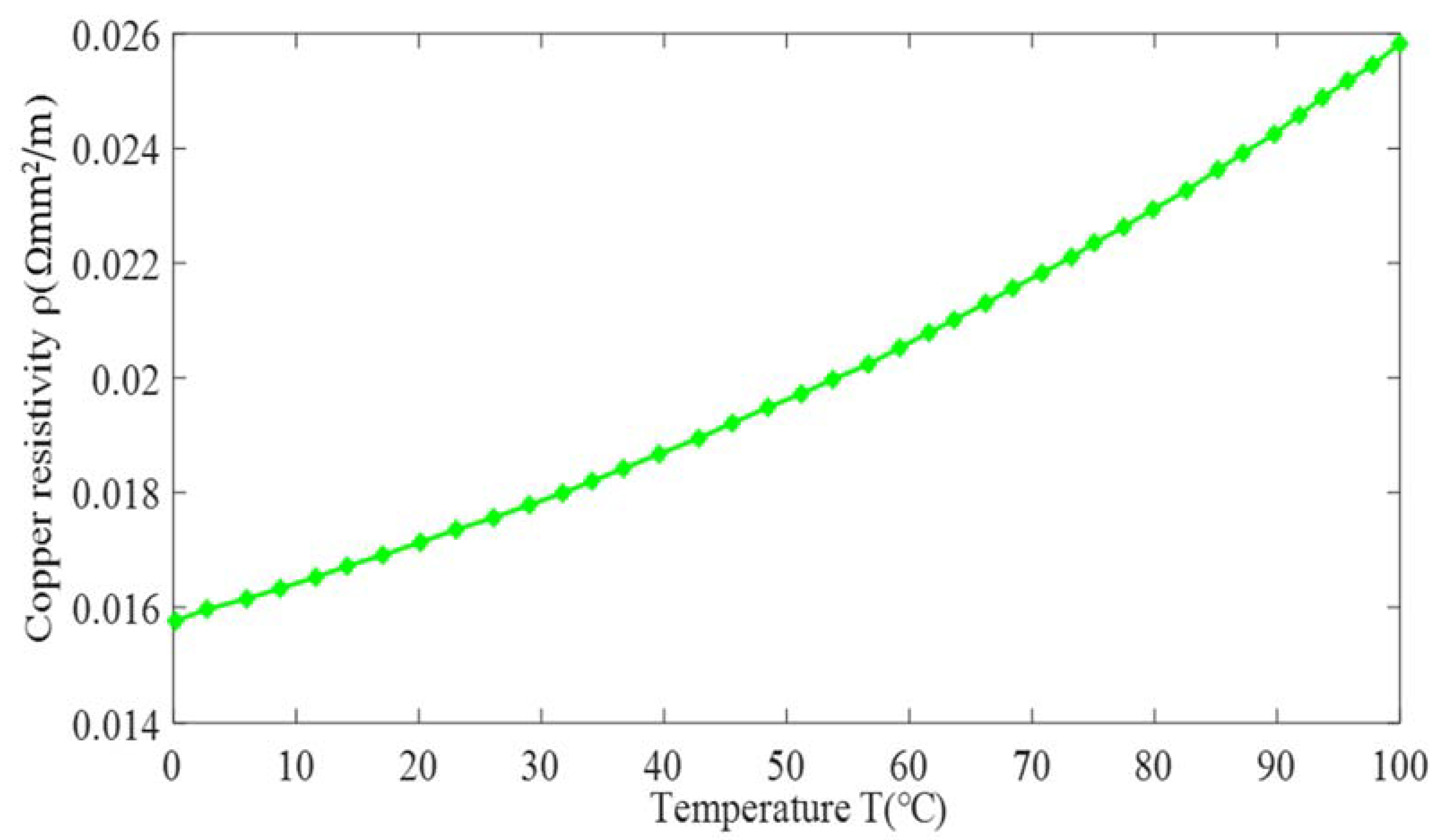
Winding copper loss
PCu of two groups of phases, phase resistance
R and copper resistivity
ρ considering electrical resistivity variation with temperature are defined as:
where
T0 is ambient temperature (°C),
ρ0 is the electrical resistivity of copper at 0 °C (
ρ0 = 0.0165 Ω mm
2/m),
ρ20 is the electrical resistivity of copper at 20 °C (
ρ20 = 0.0176 Ω mm
2/m), and
α is the temperature coefficient of copper (
α = 0.0039/°C). The winding copper resistivity
ρ increases slightly with the increase in temperature T as shown in
Figure 8.
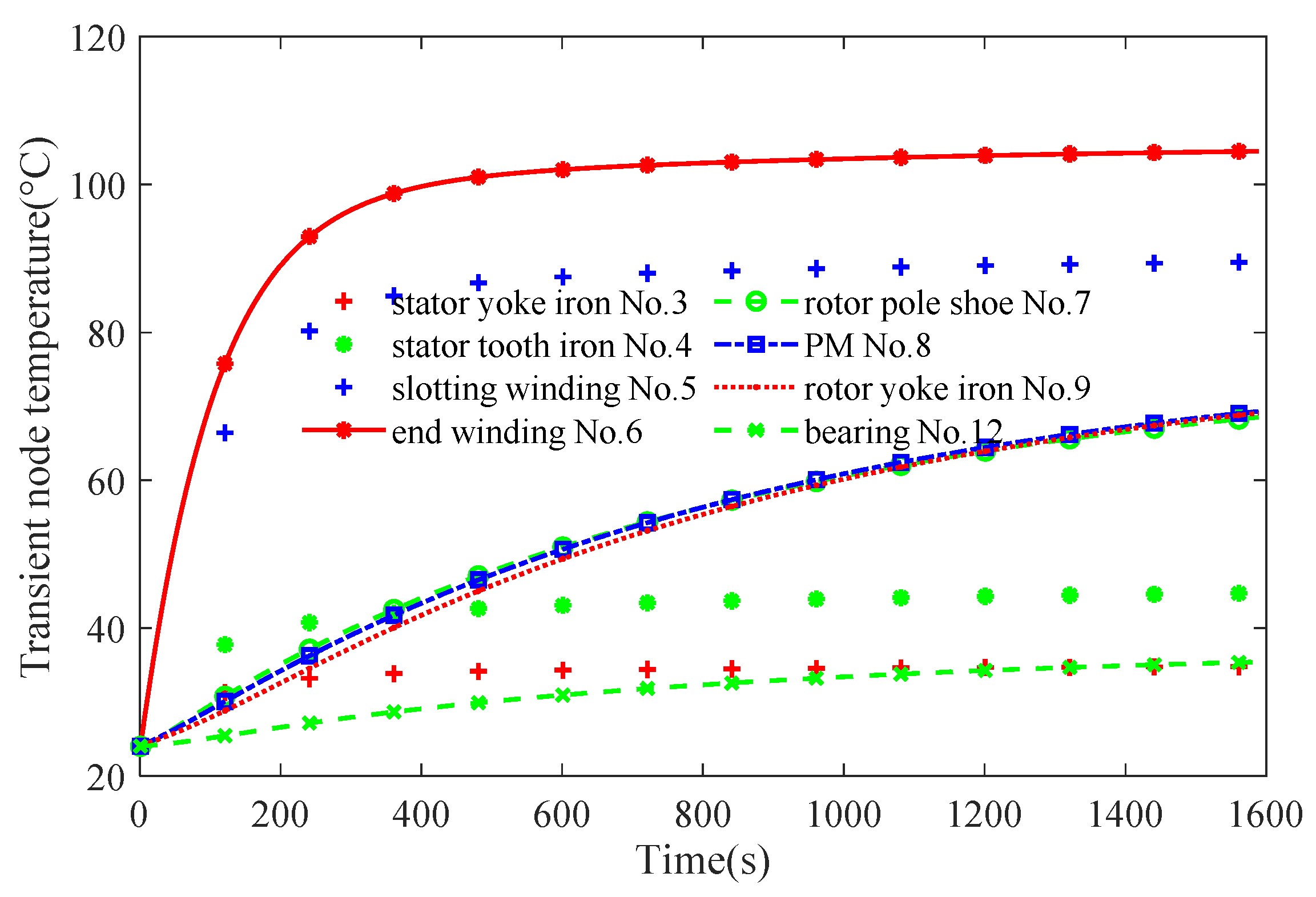
Based on the LPTN of IPMSM in
Figure 7b and Equations (7)–(13), transient node temperature curves of the main heat sources are given in
Figure 9.
First-order, second-order, and third-order exponential decay functions are used to predict the transient winding temperature for two operating points, which are given as
where
y0 is the offset distance;
A1~
A3 are amplitude;
t1~
t3 are the decay constant.
The parameters of three kinds of exponential decay functions are calculated by origin as shown in
Table 7.
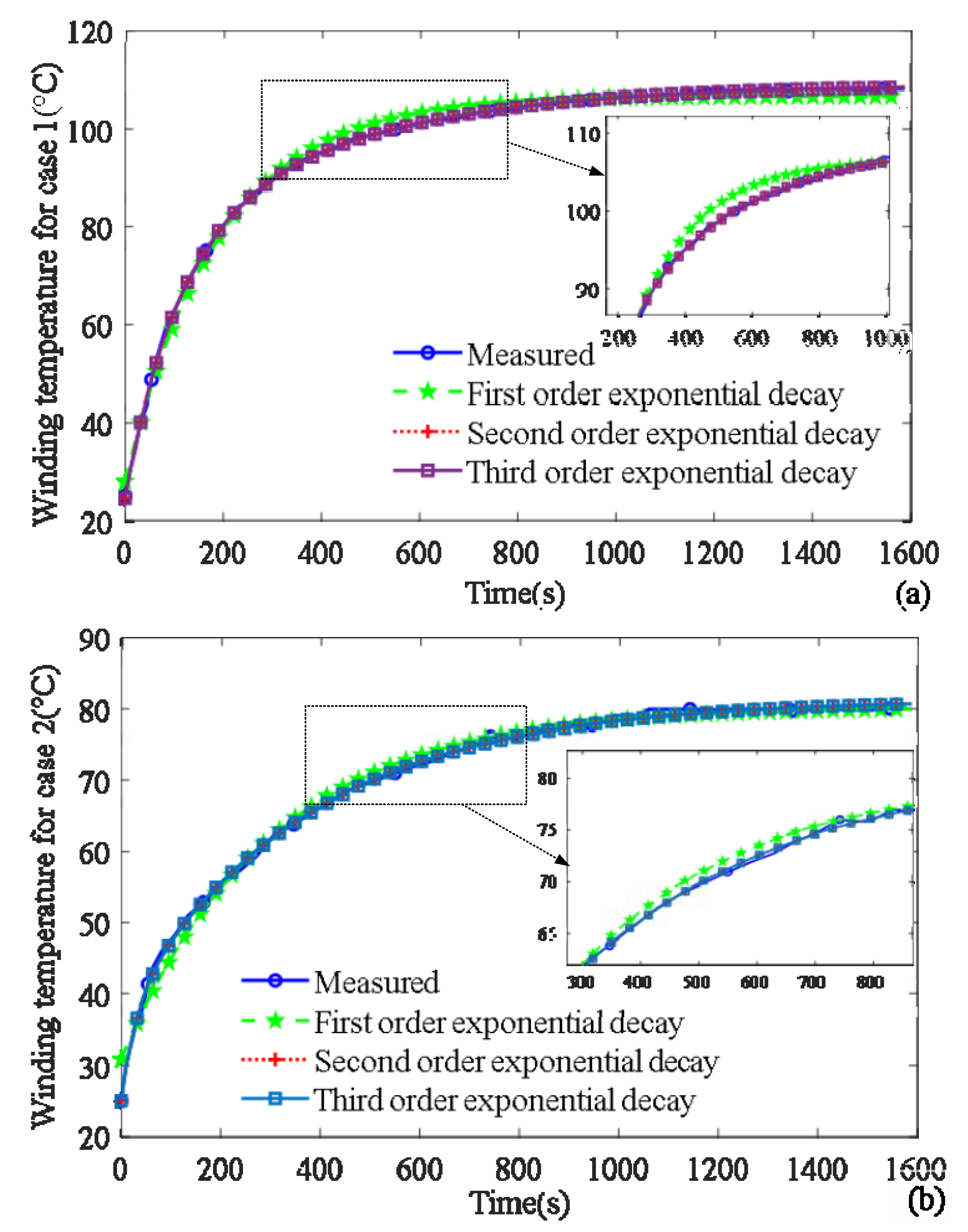
Comparison between the measured transient winding temperature and nonlinear exponential fit curves are given for two operating points. The first operating case in
Figure 10a is line voltage
Uab = 196.6 V, phase current
Ia = 203.1 A, speed
n = 3000 rpm and
Pn = 40 kW. The second operating case in
Figure 10b is line voltage
Uab = 245.6 V, phase current
Ia = 119.2 A, speed
n = 6000 rpm and
Pn = 40 kW. Winding temperature reaches the steady state after 1600 s, which benefits from the excellent heat dissipation of the water cooling. We can see from
Figure 10 that the exponential decay fit function of the second order and the third order has higher accuracy than that of the first order.
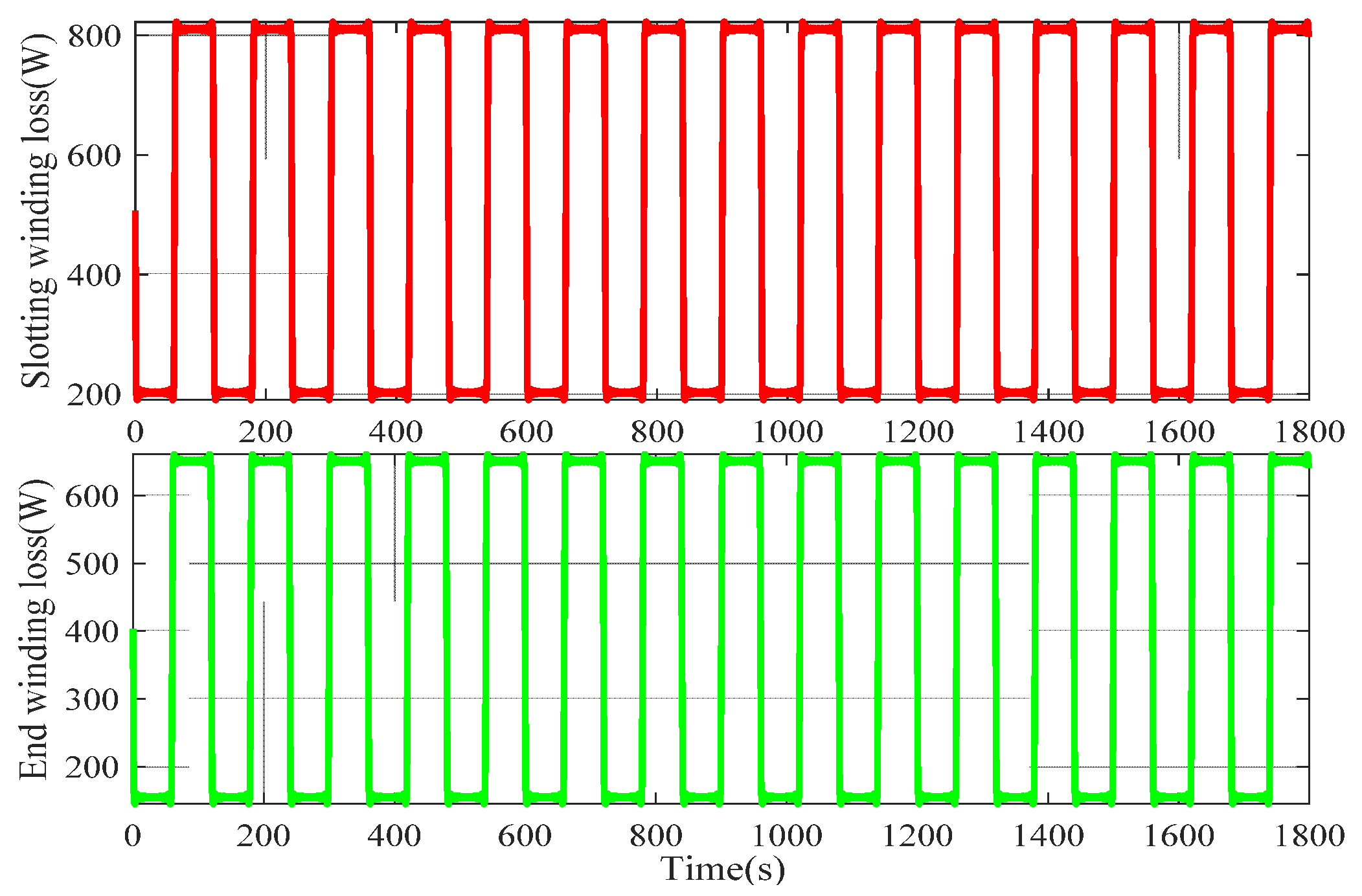
5.2. Rectangular Wave Load
The copper loss curve of the rectangular periodic wave is discontinuous at the orthogonal turning point. Therefore, copper loss curve data expressed by Fourier series are loaded discretely. Slotting winding loss and end winding loss are applied to corresponding objects in the form of Fourier series. We set a period of 120 s and run 15 cycles. Winding loss is given as
where
αdt is the duty cycle (here
αdt = 0.5),
Aslo_win1 and
Aslo_win2 are the upper and lower values of slotting winding loss (W),
Aend_win1,
Aend_win2 are the upper and lower values of end winding loss (W), respectively, and
ω is the angular frequency (rad/s).
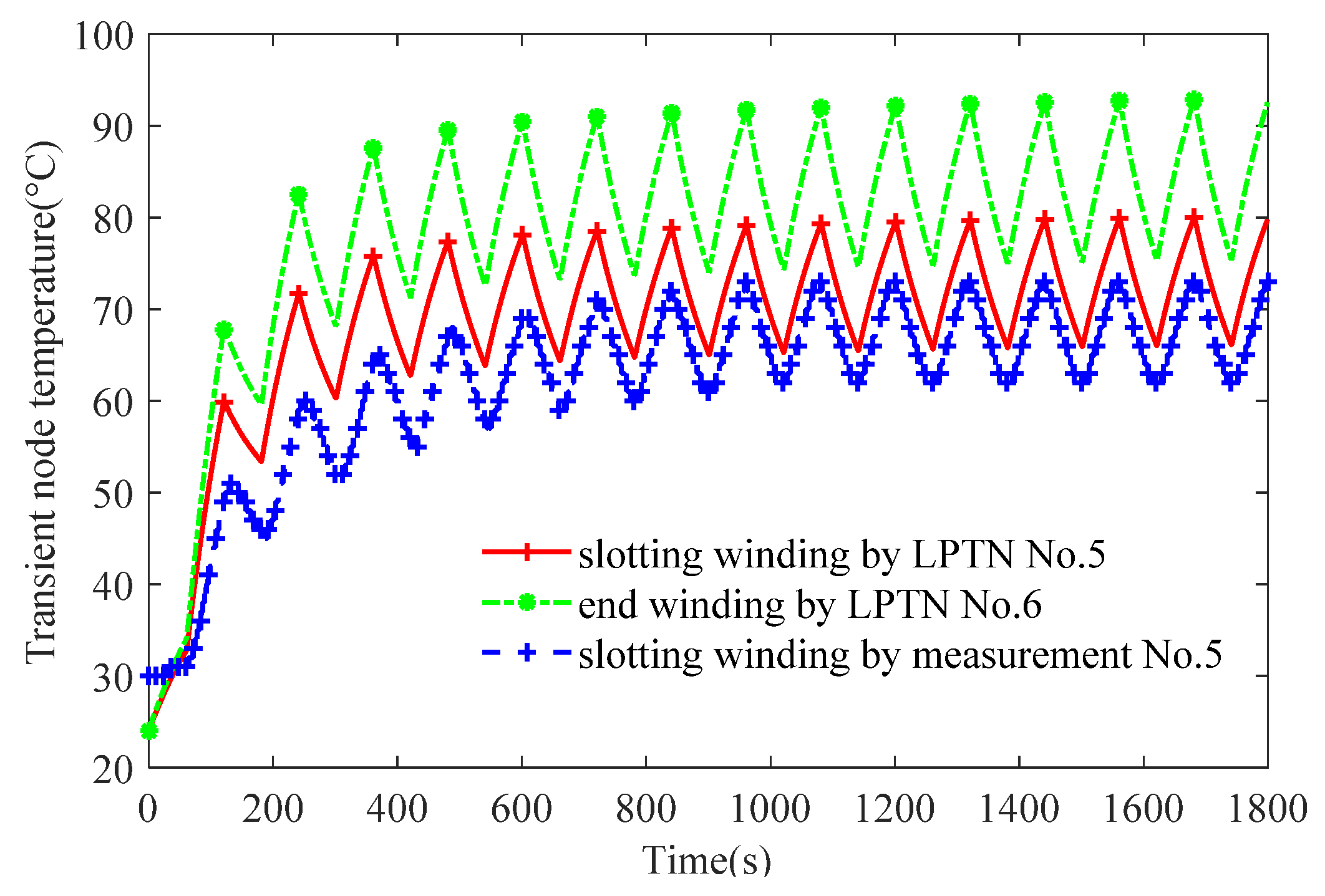
Rectangular wave loss of slotting winding and end winding is given in
Figure 11. A rectangular periodic step torque from light load to heavy load is simulated, which leads to the change of winding loss (
Aslo_win1 = 810 W,
Aslo_win2 = 203 W,
Aend_win1 = 651 W,
Aend_win2 = 155 W). The thermal source matrix is updated at every time step and transient temperature curves of slotting winding and end winding are given in
Figure 12. We can find that the calculation result of LPTN agrees well with the outcome of the experiment. For the slotting winding at the steady state, there is about an 8 °C error between the measurement value and the LPTN value. The reason for the higher value is that the value of thermal resistance or winding loss may be high for single node modeling.
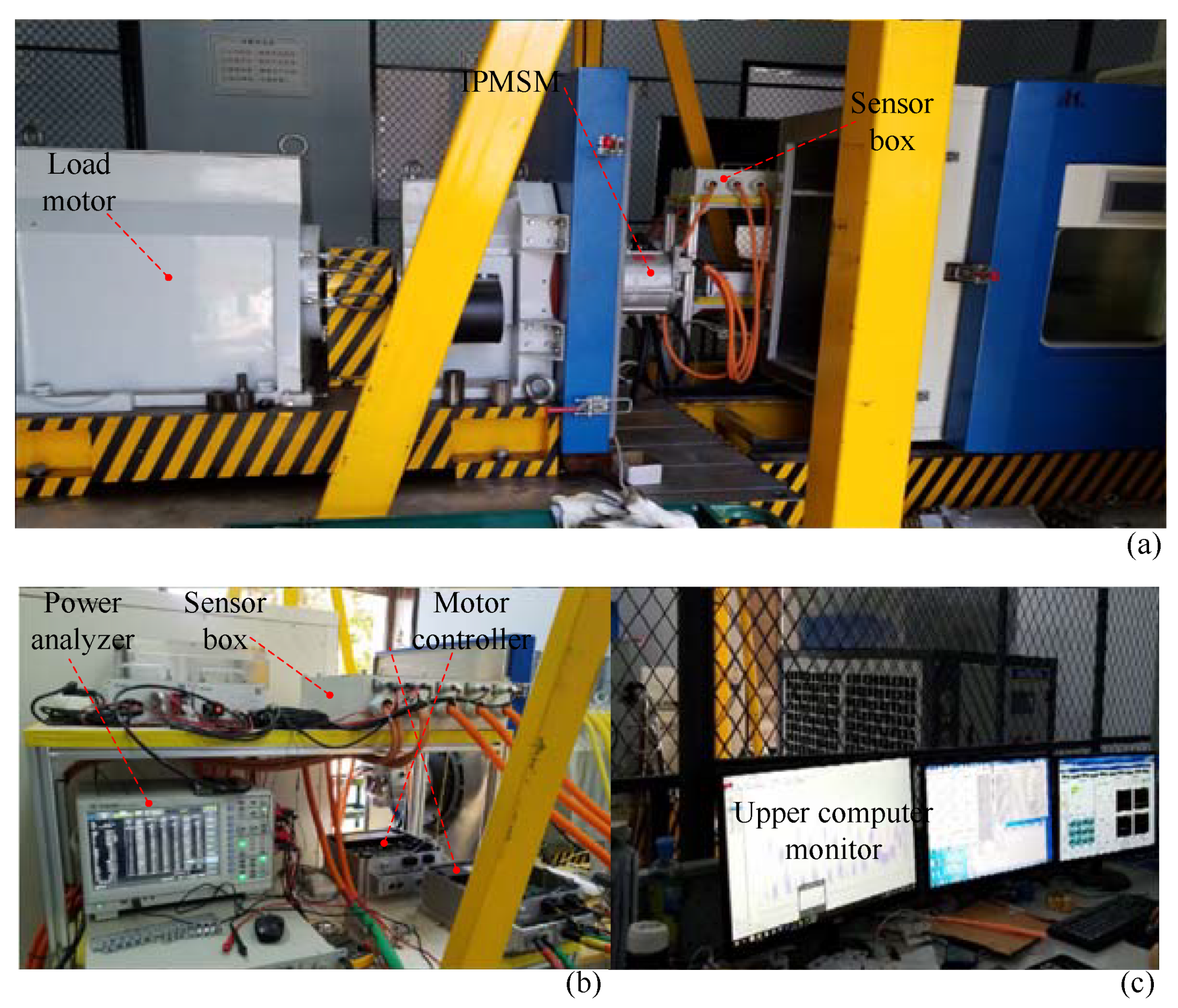
In order to verify the LPTN model, the prototype of 48-slot/8-pole IPMSM with “V” type rotor and ISDW stator is designed and manufactured. The stator and rotor are shown in
Figure 13. A load test platform is established to validate its temperature rise and output characteristics, as shown in
Figure 14.
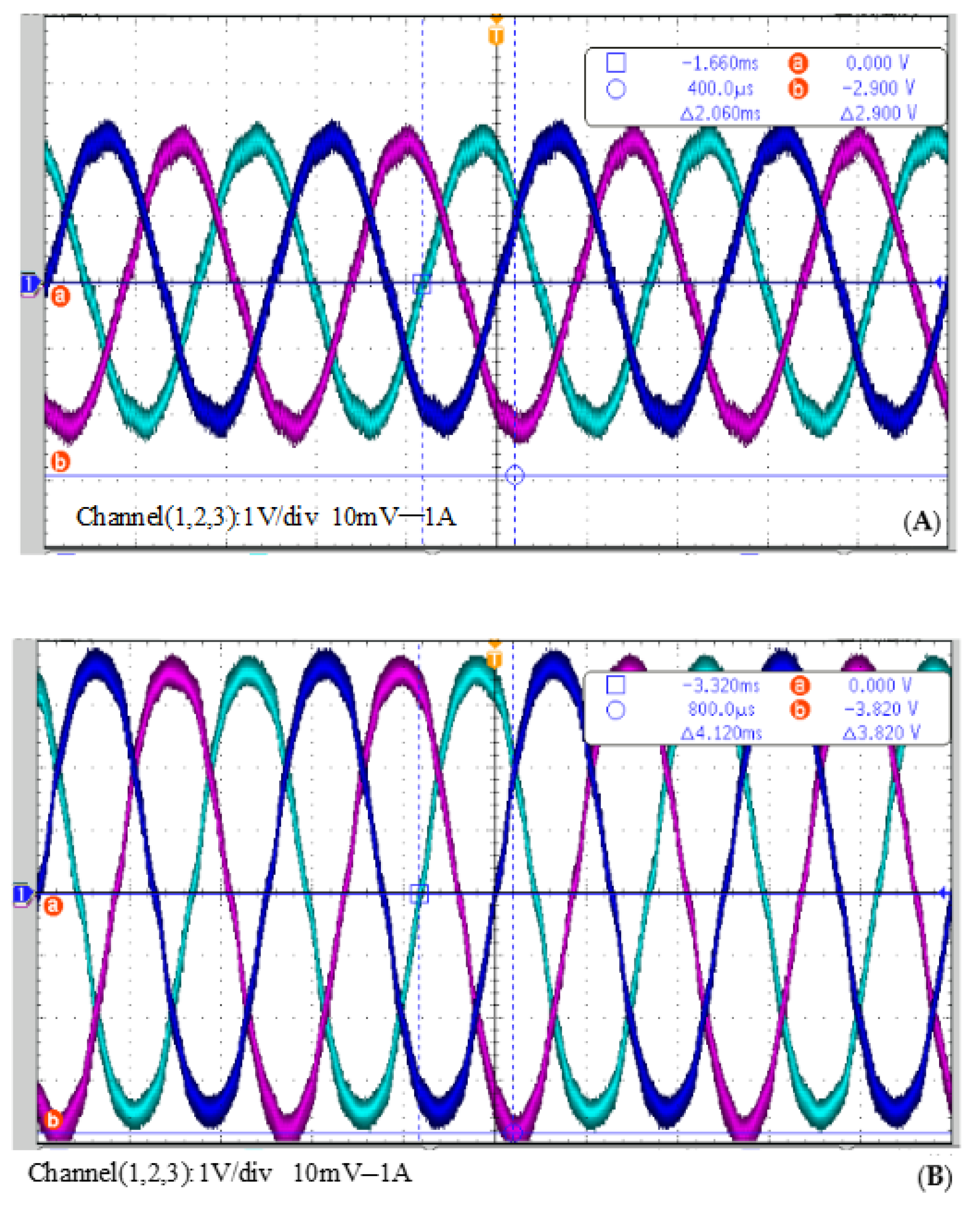
The measured phase current wave using three AC current clamps under rated load conditions is shown in
Figure 15A, whose peak value reaches 232 A. The phase current under overload conditions is obtained in
Figure 15B, whose peak value reaches 382 A.
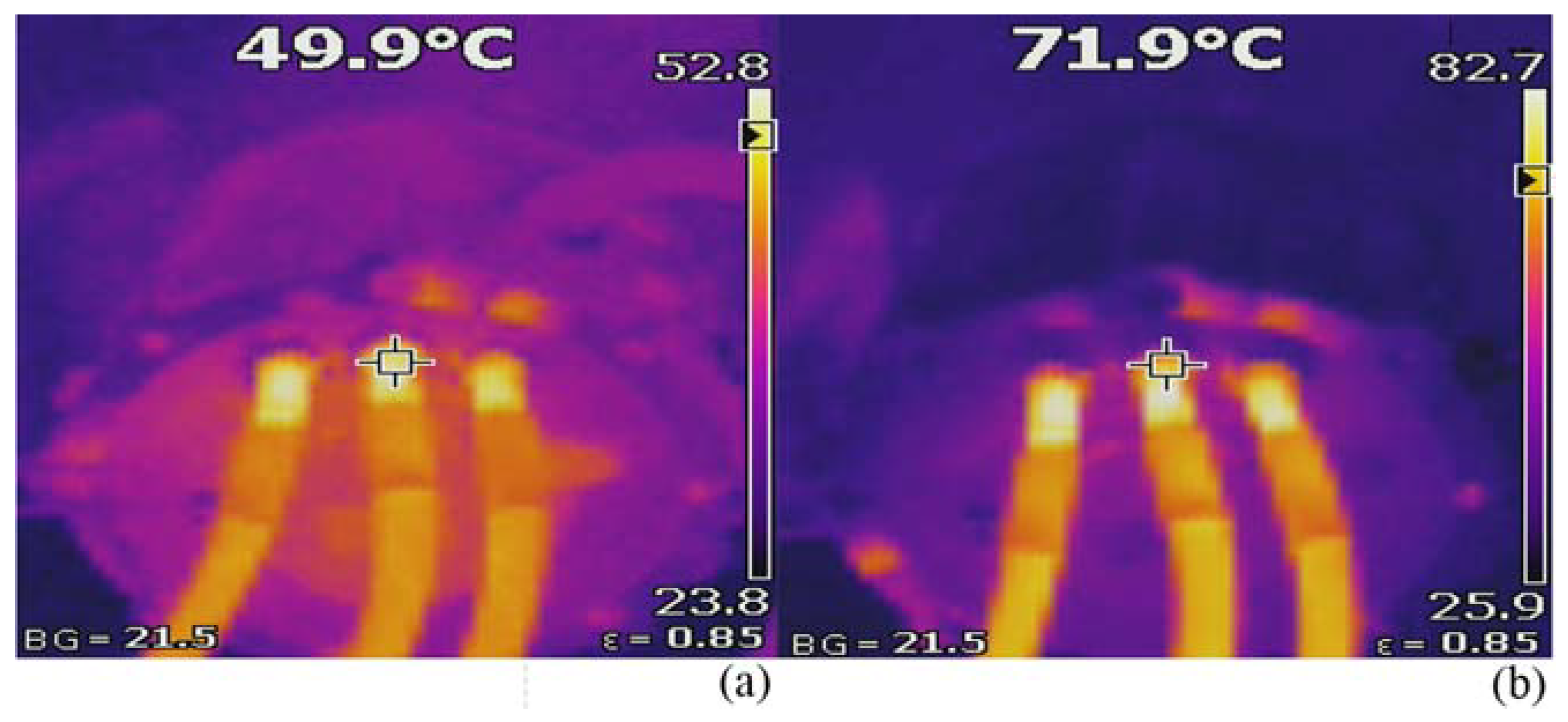
The temperature of the IPMSM parts is measured by thermocouple PTC100 and a FLUKE infrared imaging device. Thermocouple temperature sensors PTC100 are inserted into slotted windings for measuring the temperature of the slotted winding. The outer surface temperature of the IPMSM is measured by using a FLUKE infrared imaging device in
Figure 16.
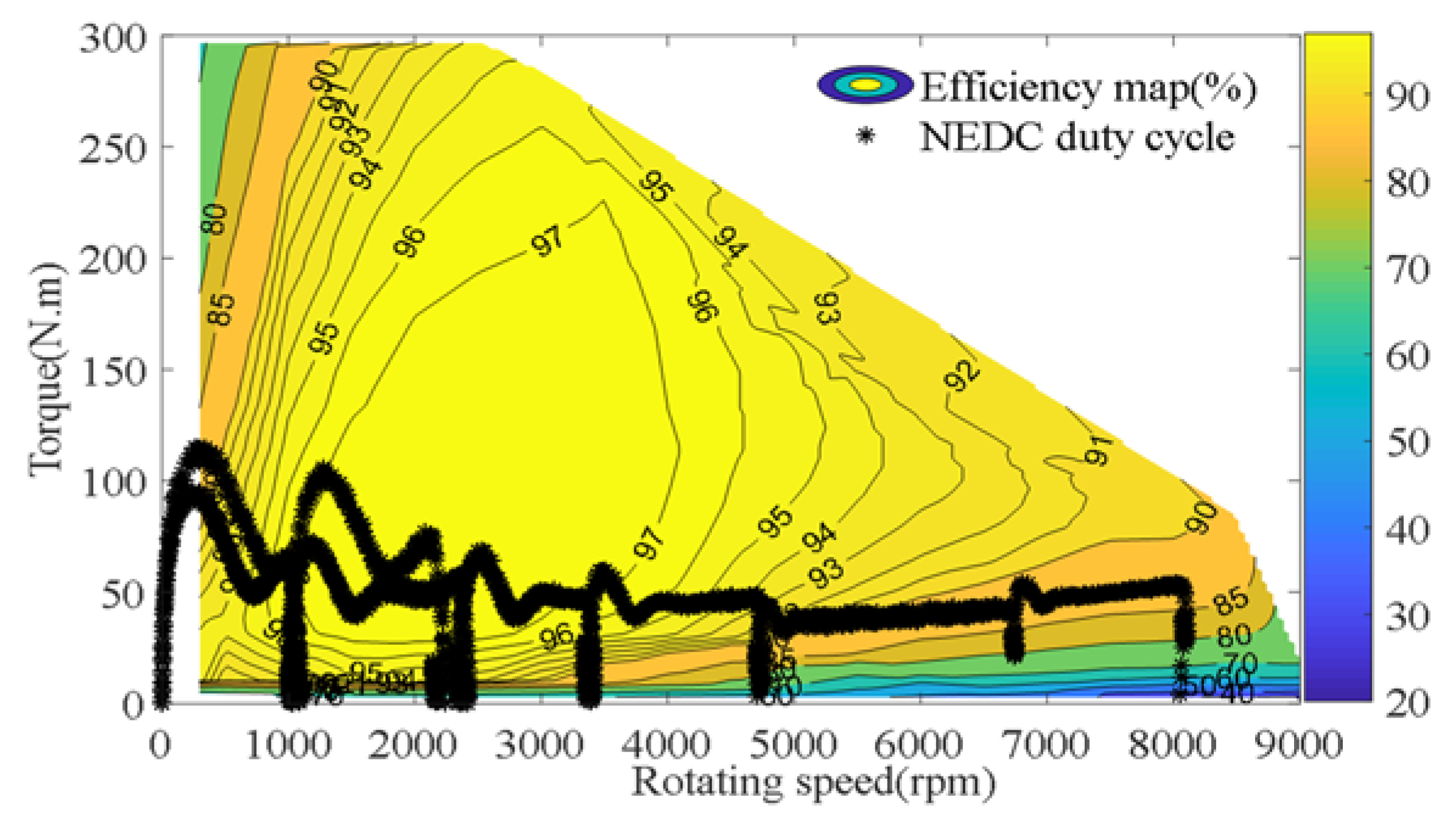
The measured IPMSM efficiency versus different load torques at 3000 rpm and 6000 rpm are given in
Figure 17. We found that efficiency is higher at a rated speed of 3000 rpm. Due to a large copper loss and iron loss in the field-weakening region, efficiency is relatively low. A measured IPMSM efficiency map including constant torque and constant power operating regions is given in
Figure 18. The operating point of the NEDC duty cycle is also obtained by the test platform as shown in
Figure 18. We found that the maximum efficiency of IPMSM reaches about 97%; however, the relatively low efficiency in the constant power operation region ranges from 80% to 87% for the NEDC duty cycle.
6. Conclusions
The method of the first-order LPTN is deduced by solving the non-homogeneous linear differential equation. The results show that the heat transfer coefficient of fluid and thickness of air gap layer are the main influencing factors for reaching a steady temperature. The larger the heat transfer coefficient of fluid is, the lower the steady node temperature is. The smaller the air layer thickness is, the lower the steady node temperature is.
Furthermore, the multi-order LPTN theory is deduced based on the extension of first-order transient LPTN. For the constant load and rectangular periodic load, the transient node temperatures of IPMSM are obtained by modeling transient LPTN and solving the non-homogeneous linear differential equation. Compared with the experimental data, exponential decay fit function of the second order and the third order has higher accuracy than that of the first order, which can serve as an alternative to full-order thermal networks.
The temperature rise experiment platform including IPMSM manufacture is established to validate the above-mentioned method using a FLUKE infrared thermal imager and thermocouple PTC100. Load current and efficiency maps are obtained using the dynamometer platform. The load experiment shows that the transient LPTN of the IPMSM can accurately predict node temperature variation.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}