
Modelling and Computational Experiment to Obtain Optimized Neural Network for Battery Thermal Management Data

 ,
,  , and
, and
Abstract
:1. Introduction
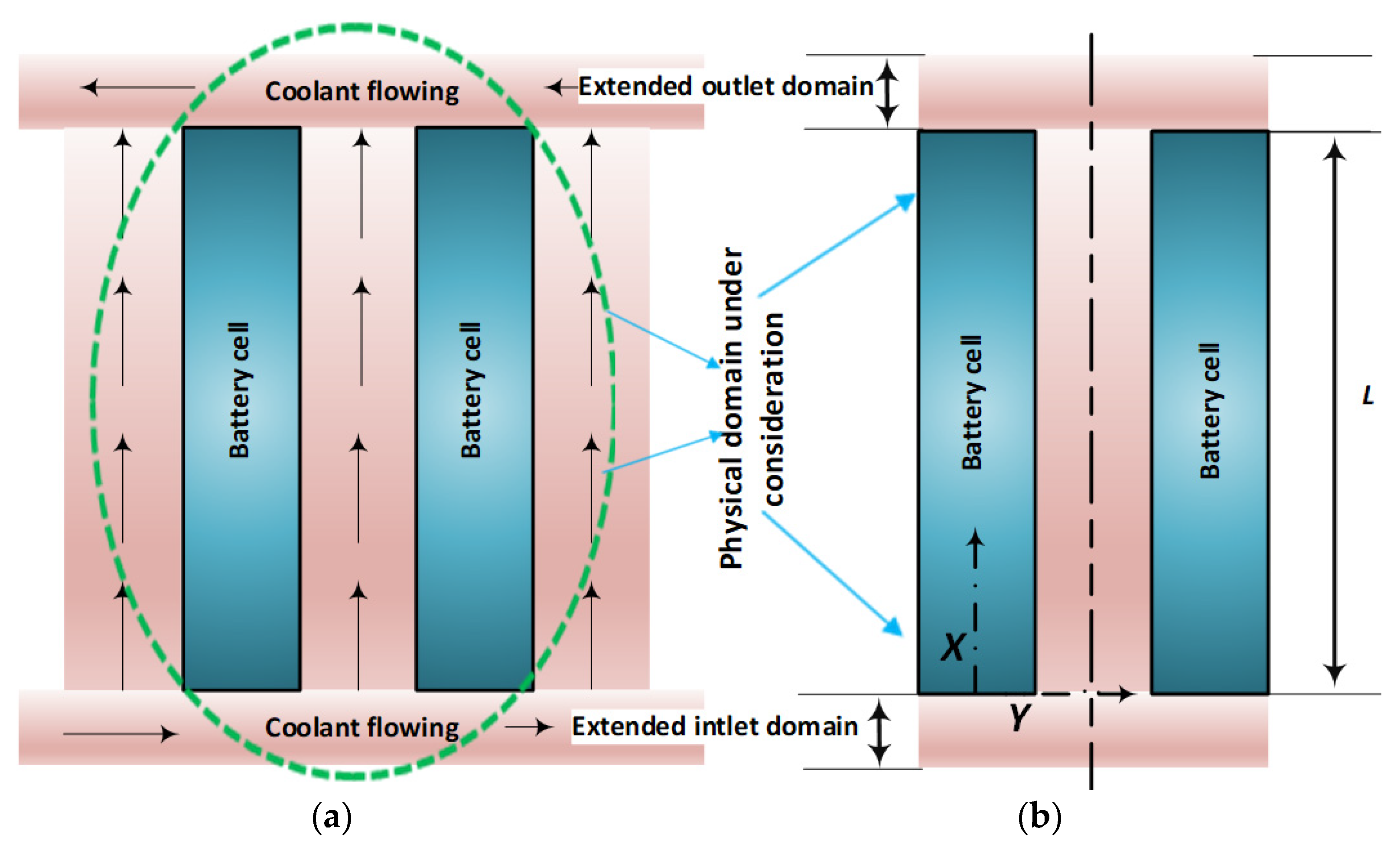
2. Battery Modelling
- (i)
- The battery element’s substance is homogeneous and isotropic.
- (ii)
- The battery element’s conductivity is temperature independent.
- (iii)
- The temperature gradient in the x–y plane is insignificant.
- (iv)
- The flow is 2D, laminar, and incompressible.
- (v)
- The coolant is viscous and Newtonian.
- (vi)
- The coolant’s thermophysical characteristics are constant.
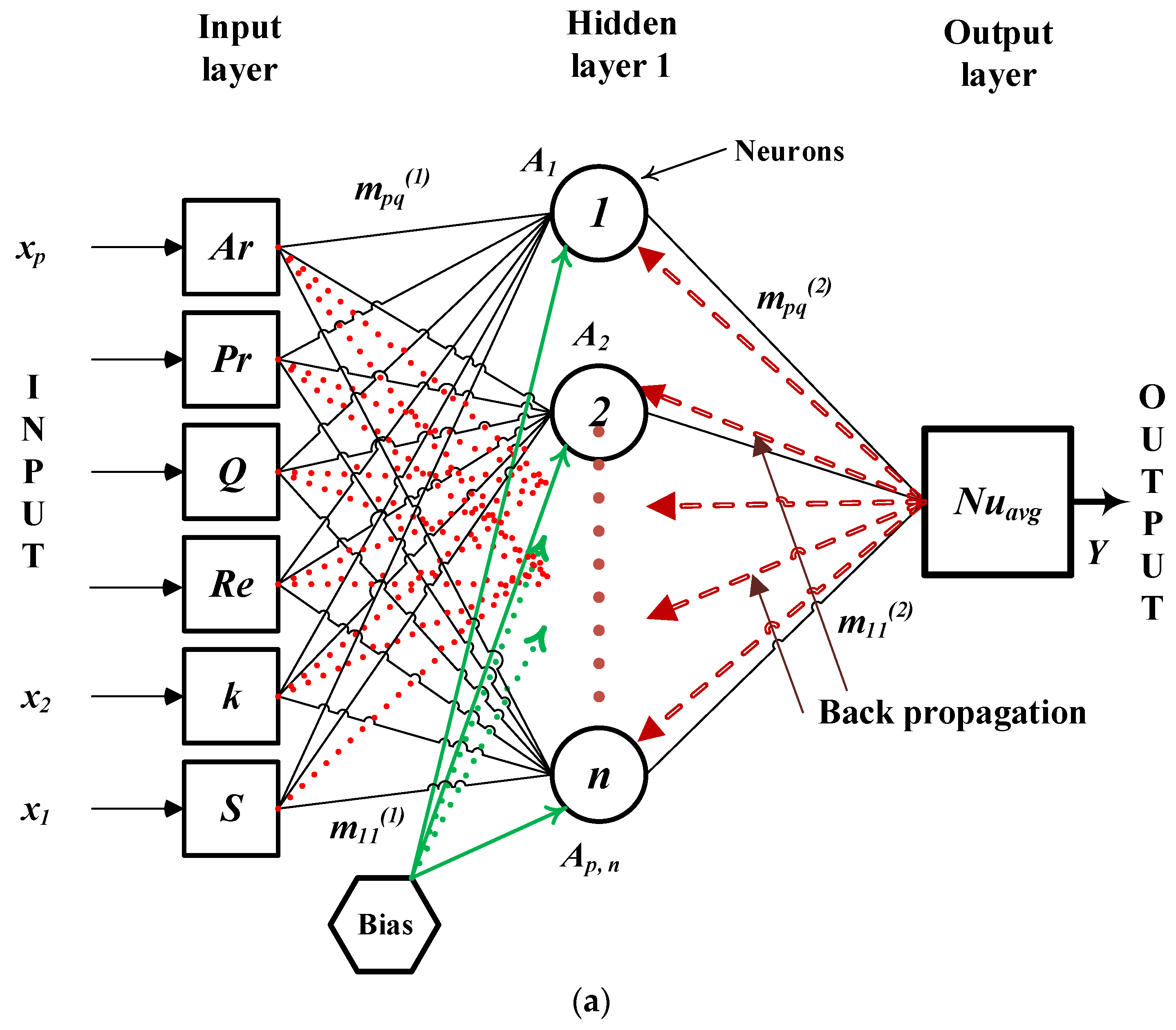
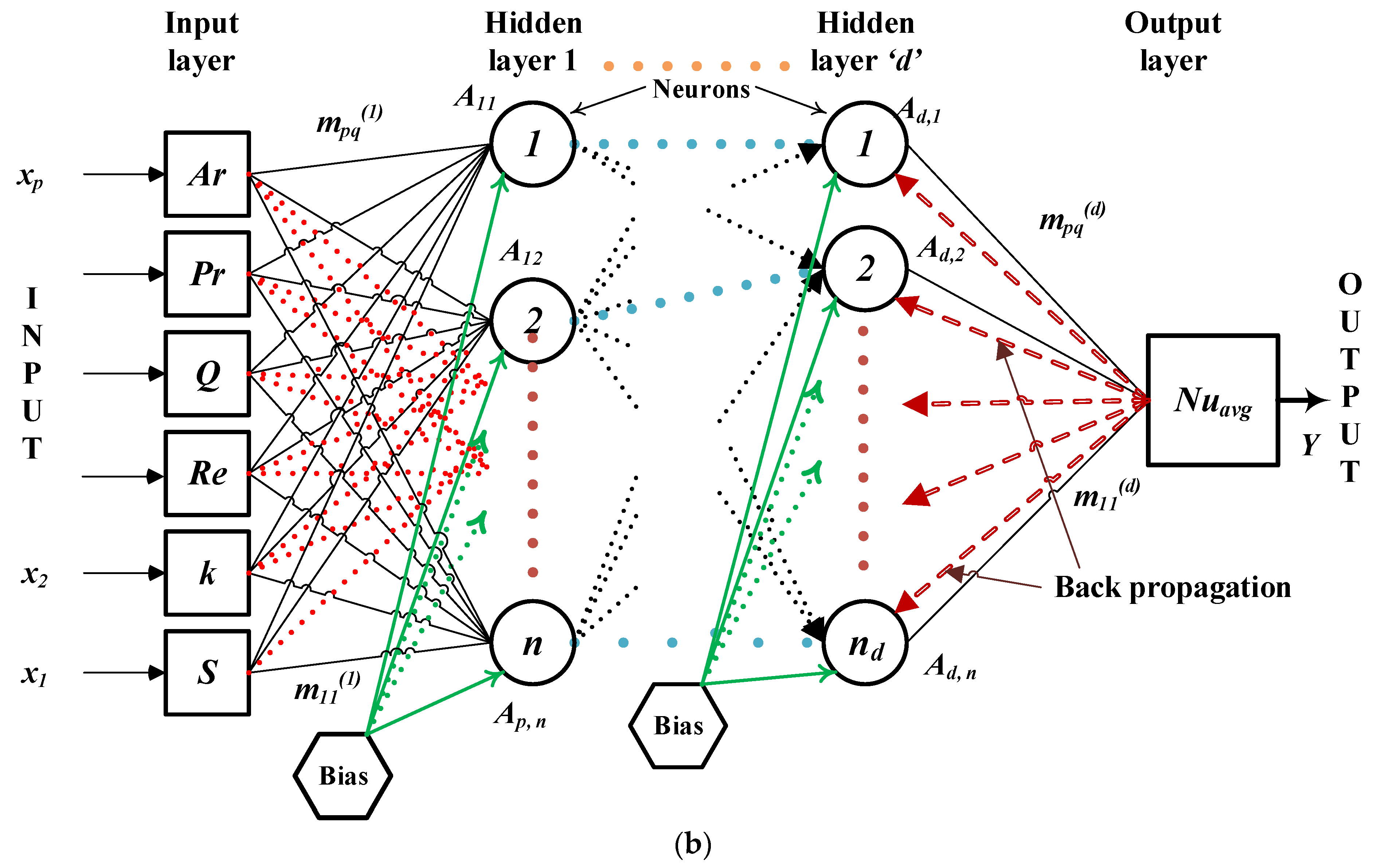
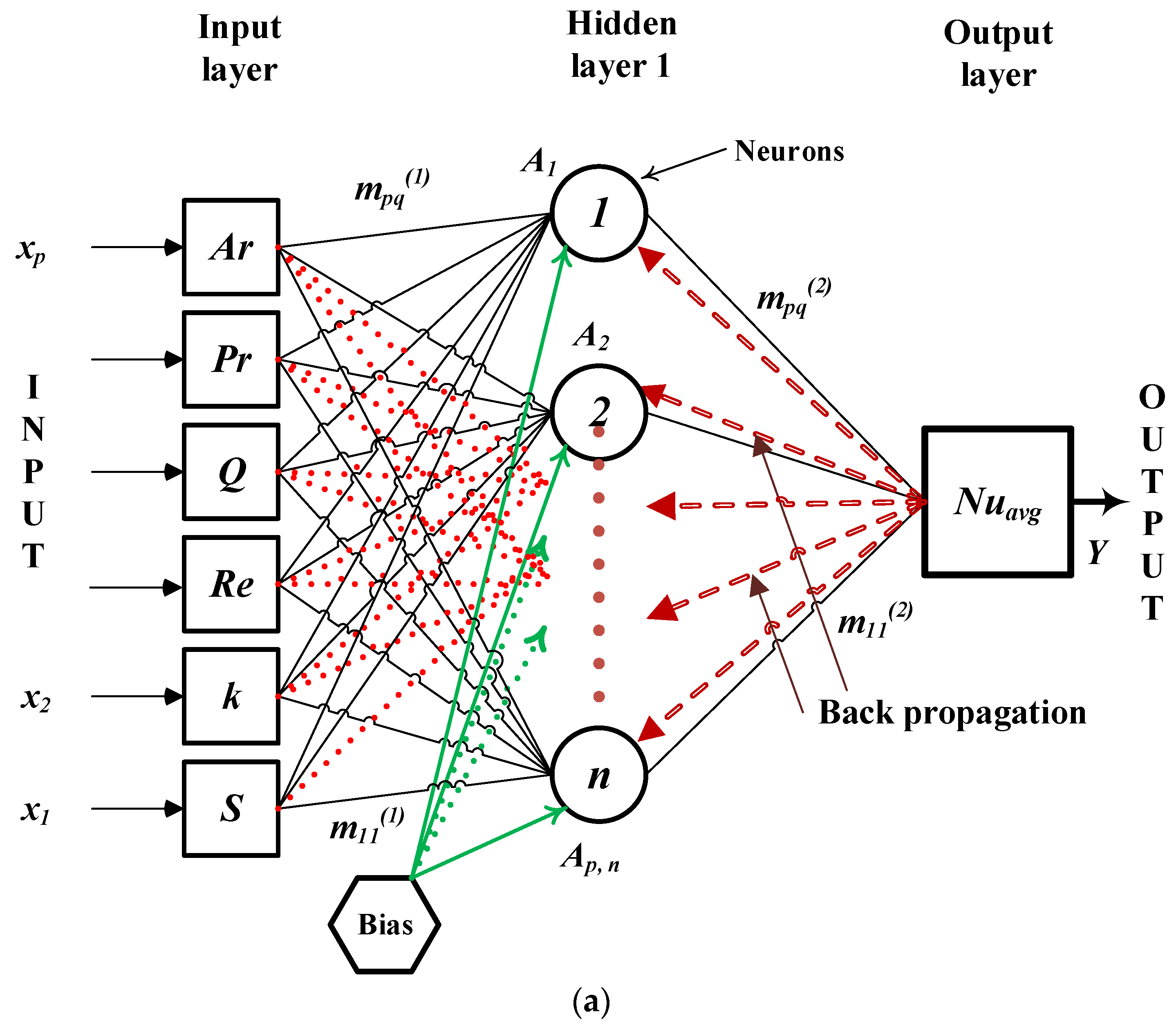
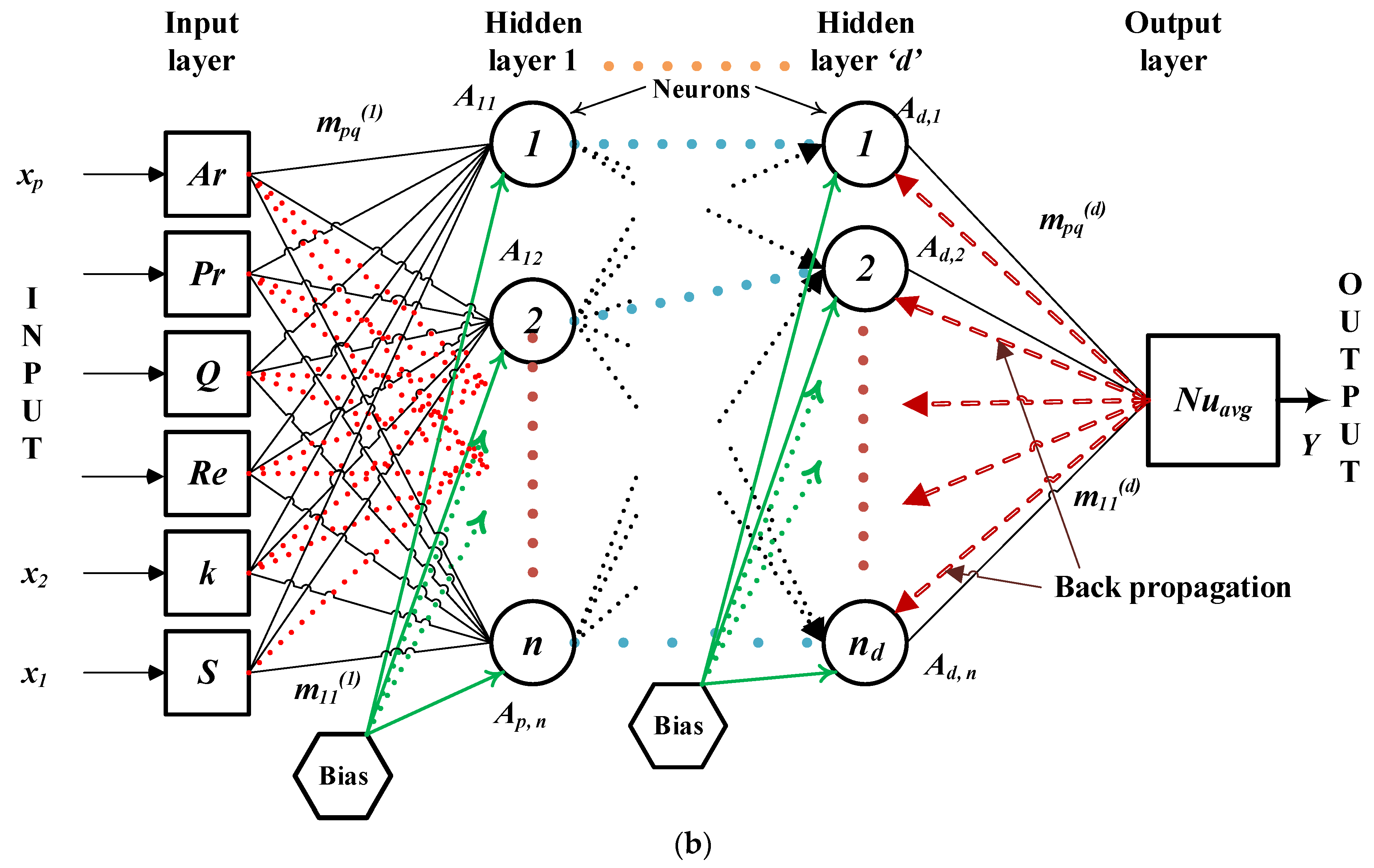
3. Artificial Neural Network (NN) Modelling
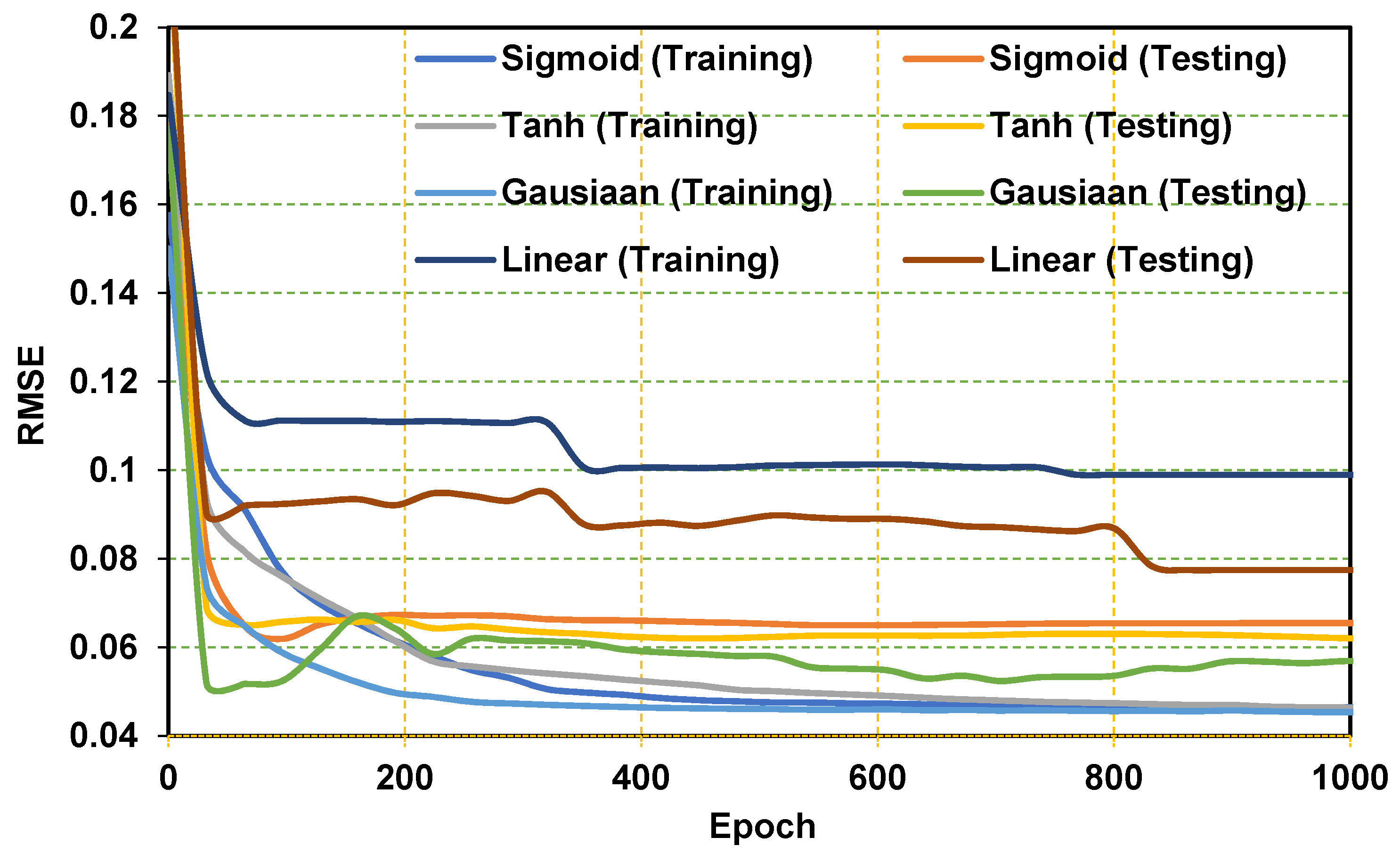
4. Results and Discussion
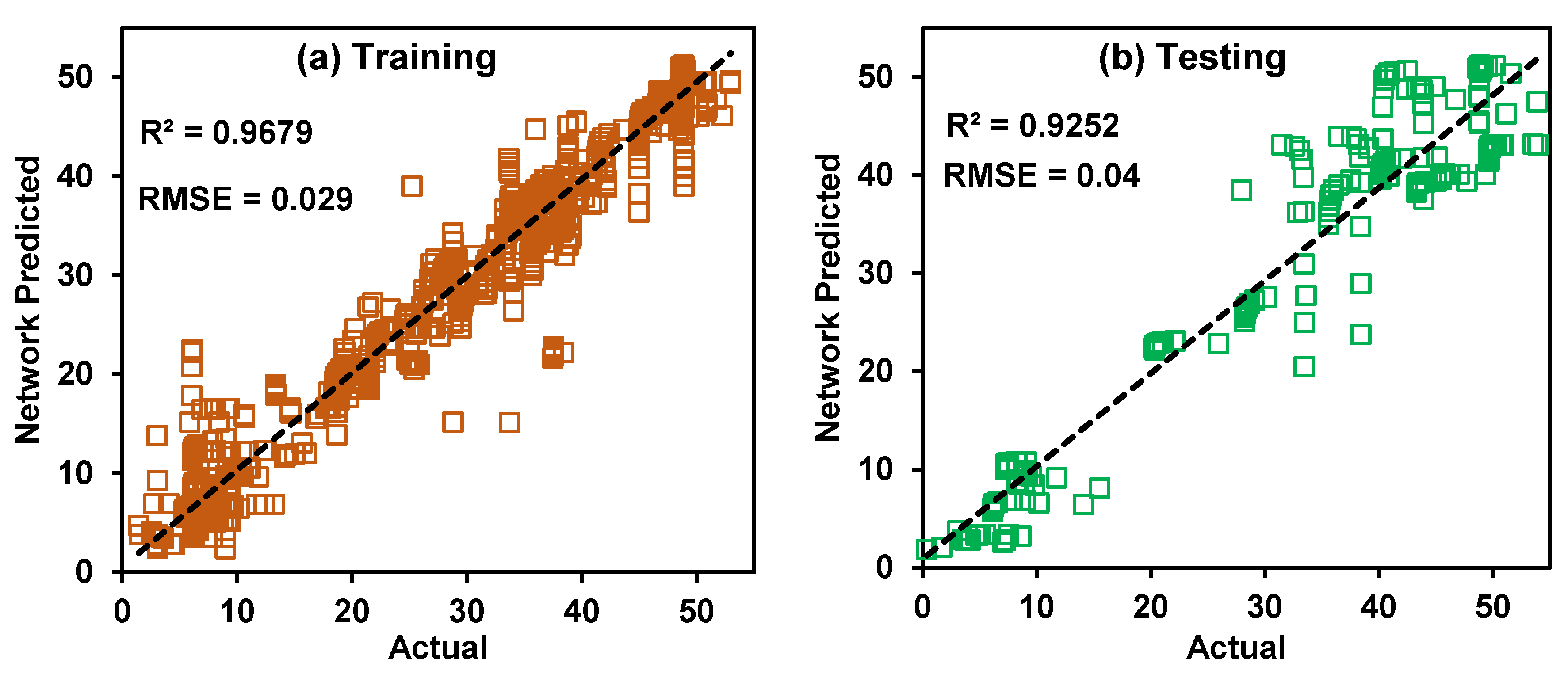
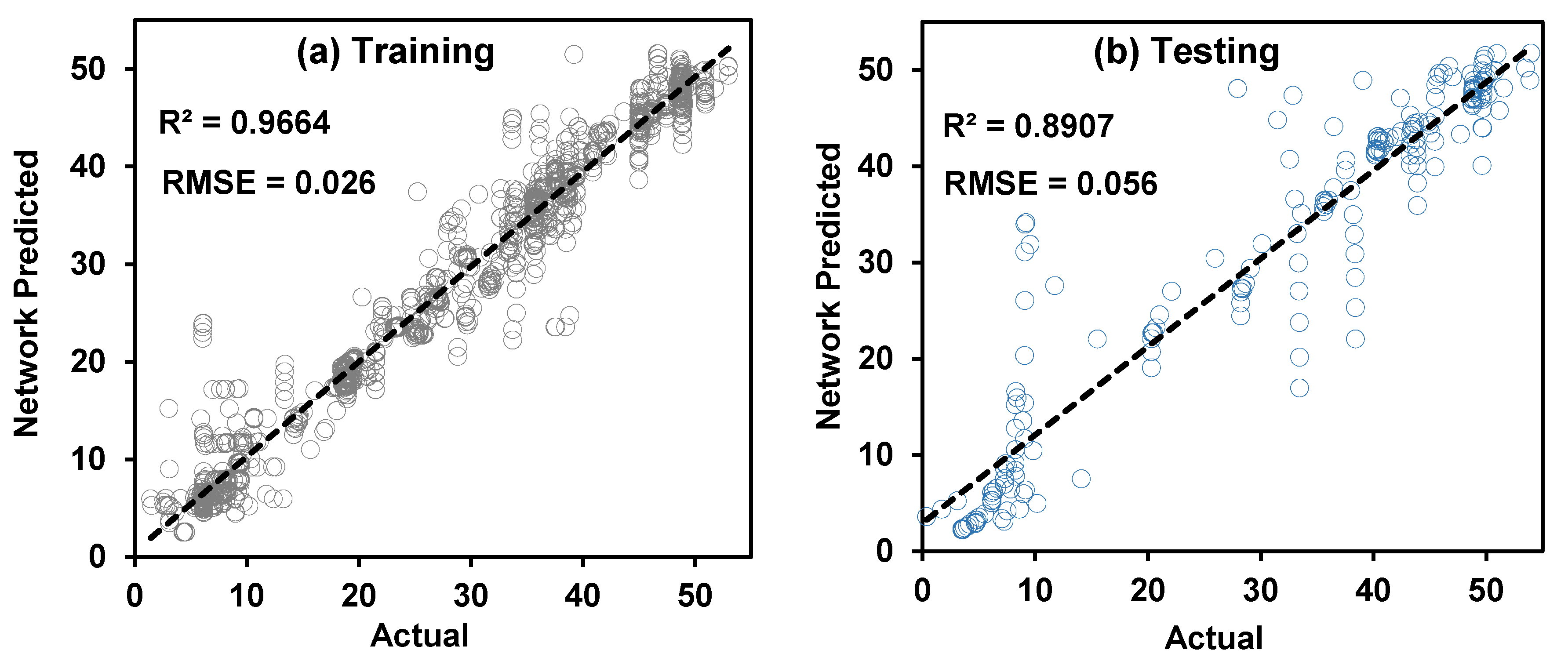
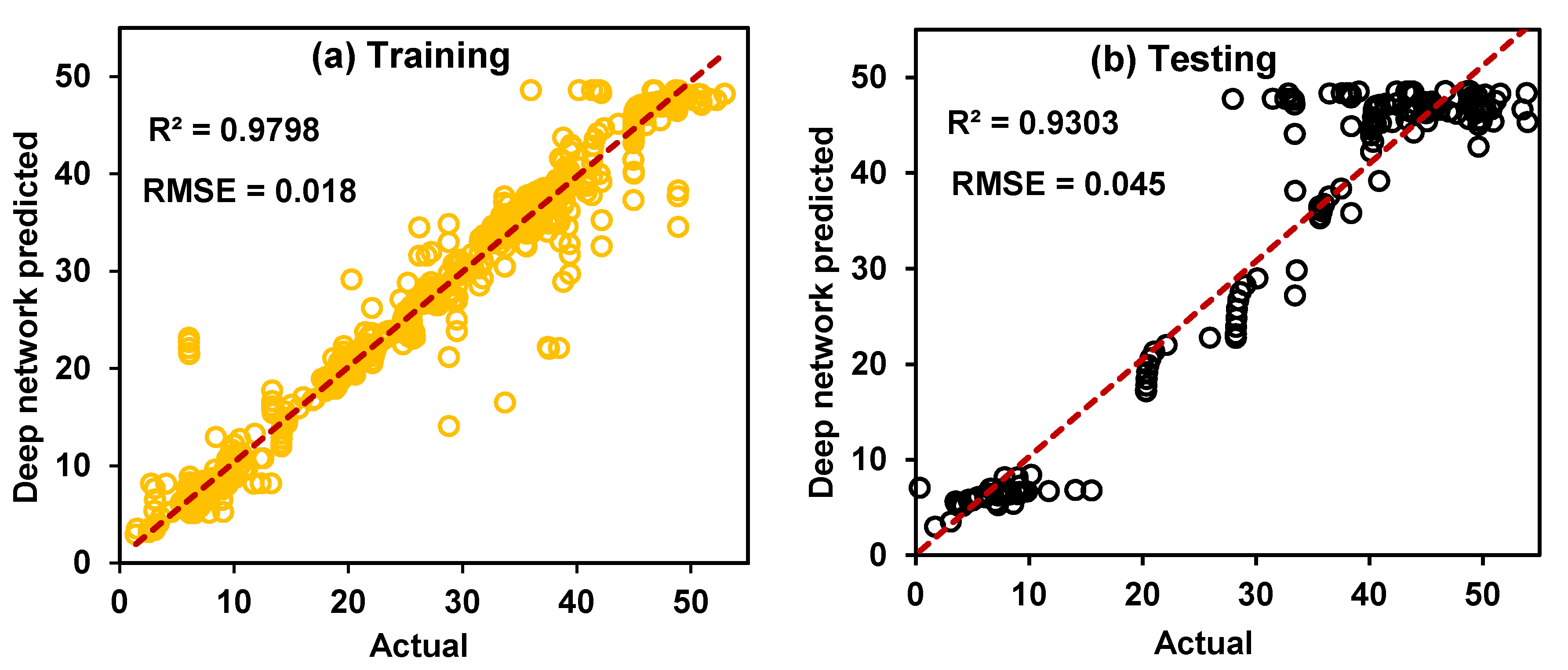
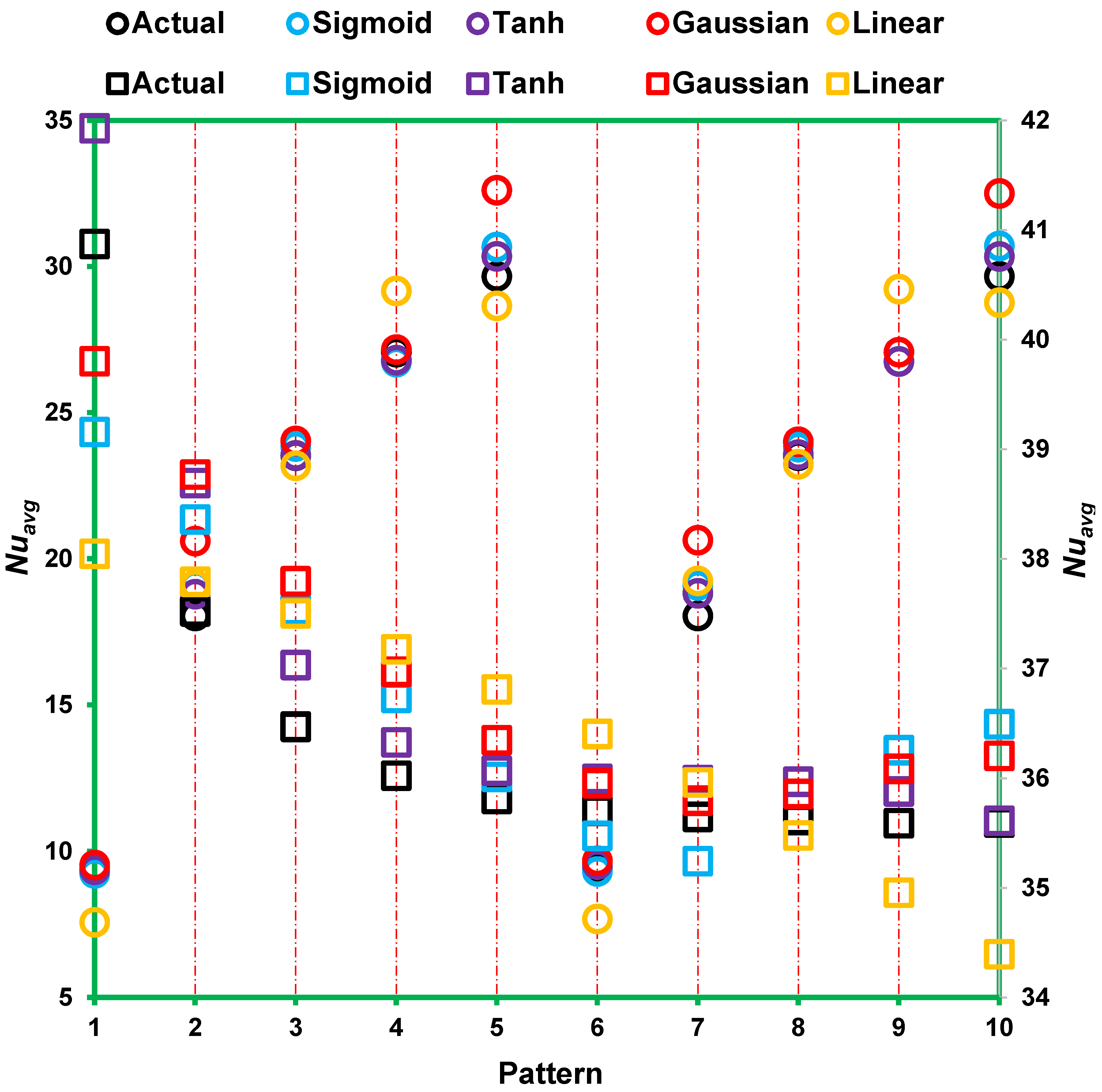
4.1. NN1 Modelling of Nuavg
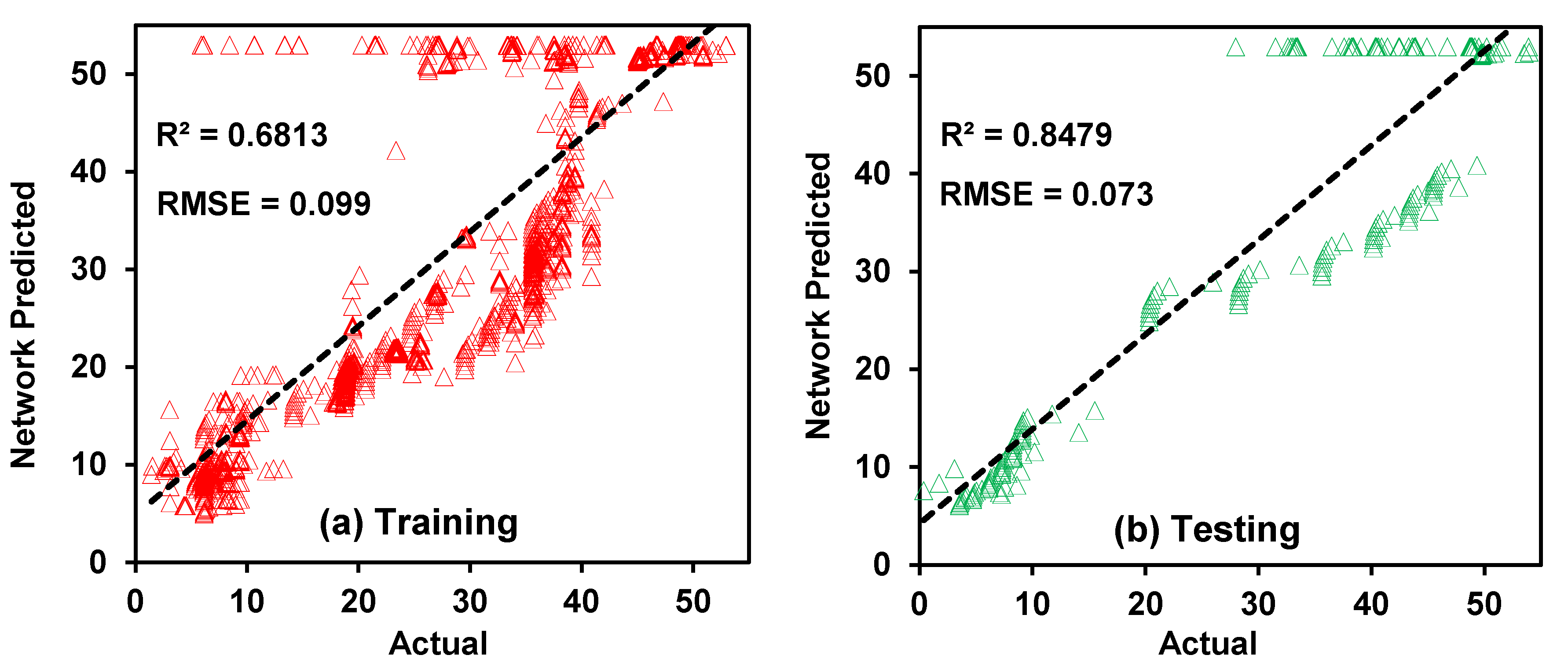
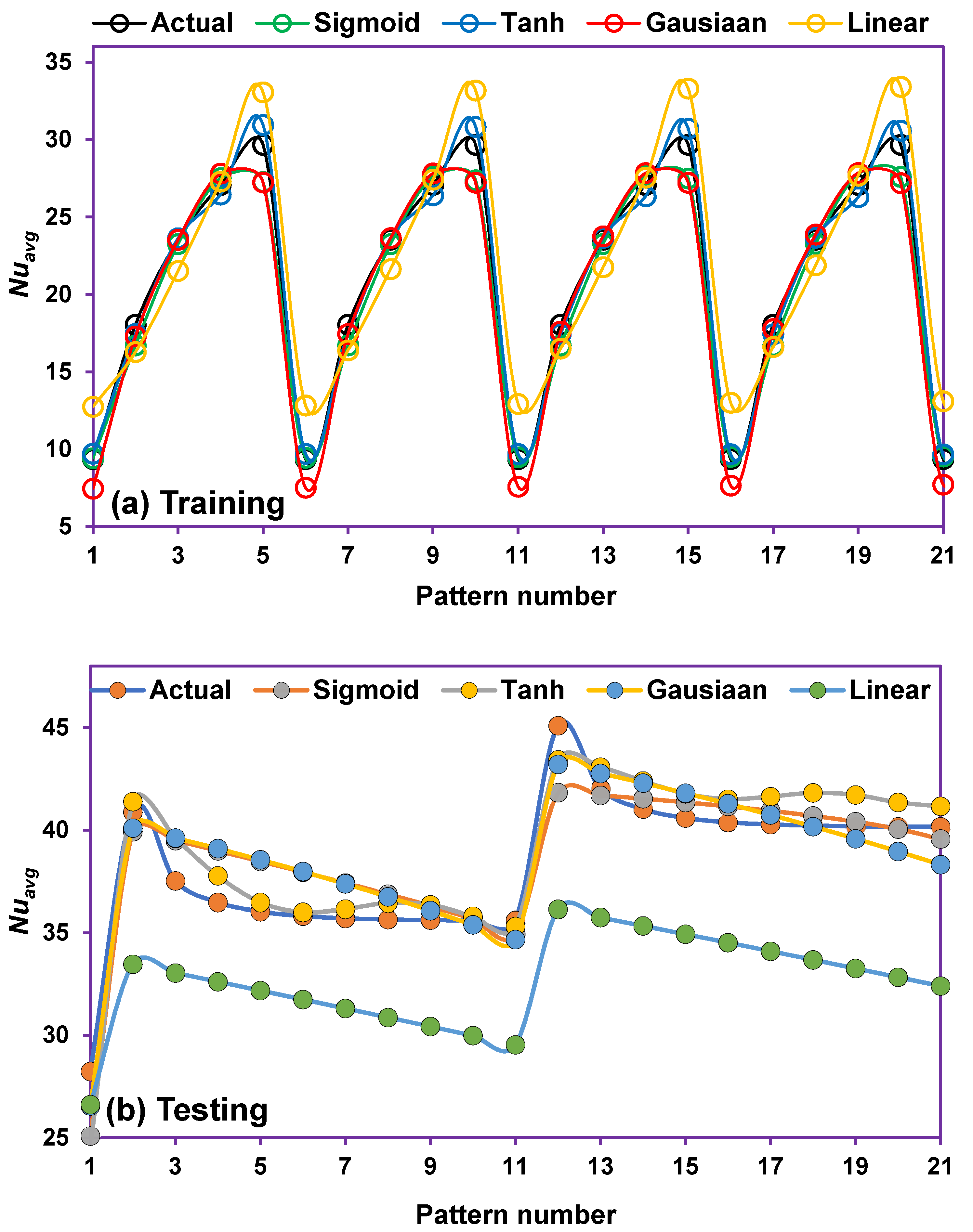
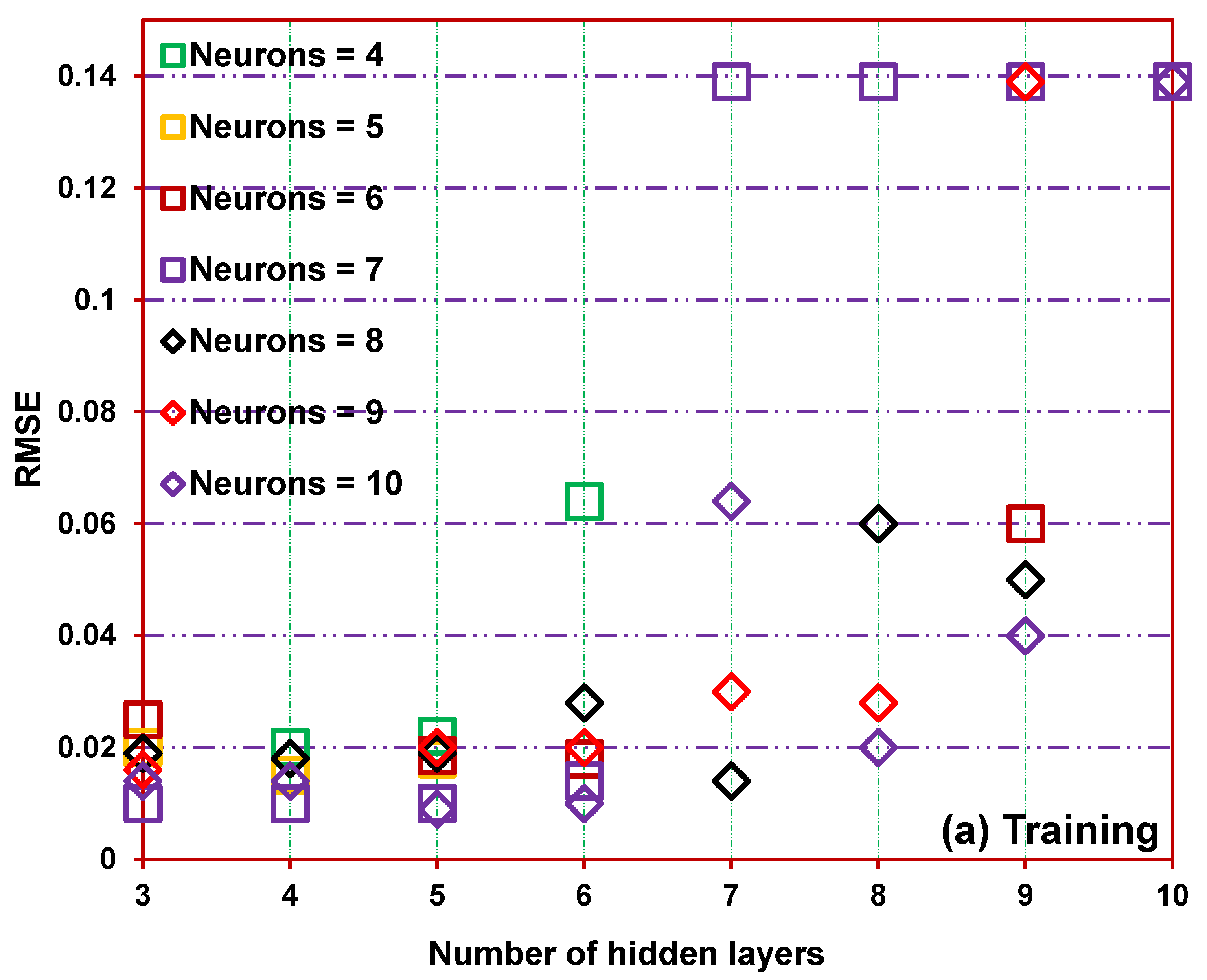
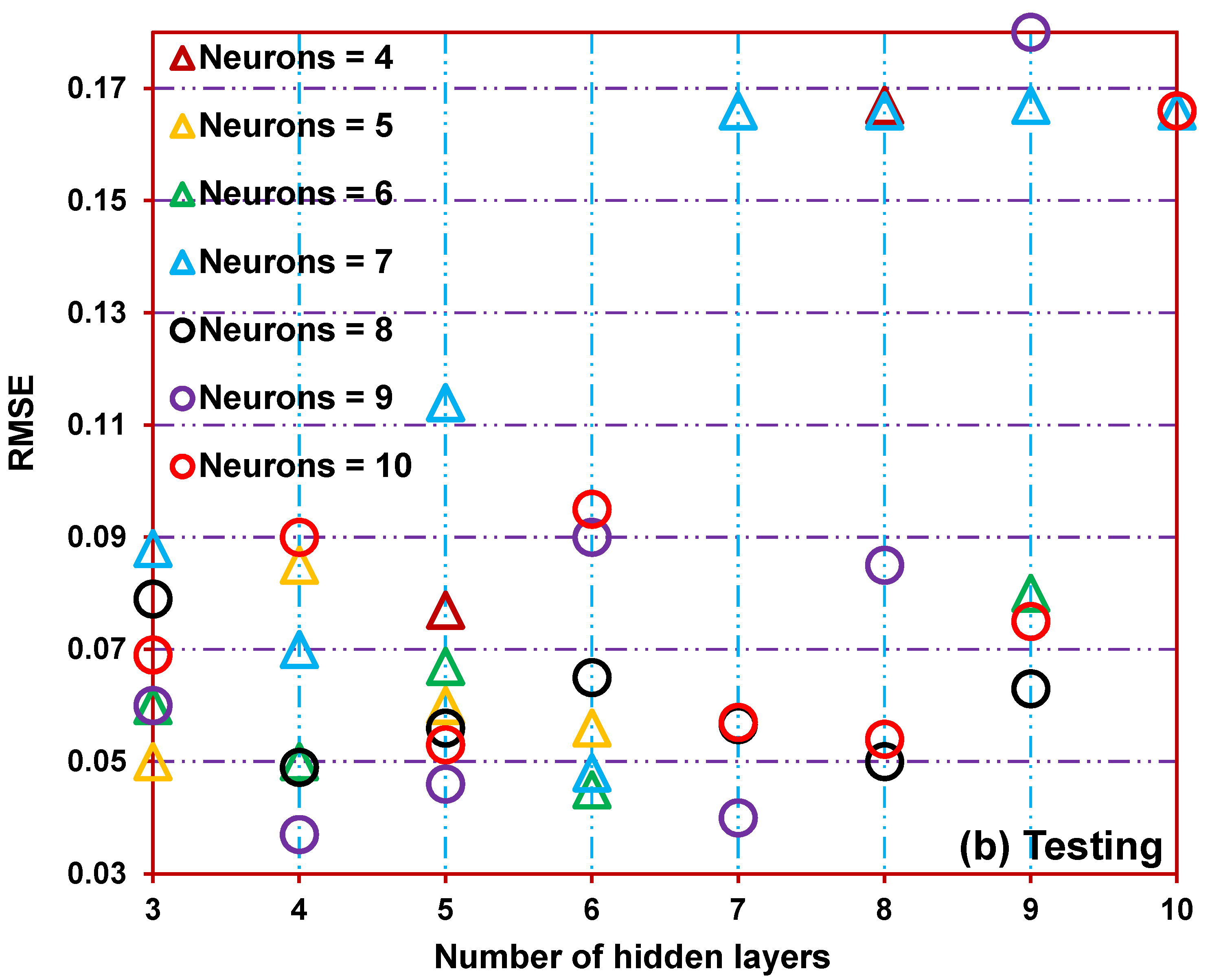
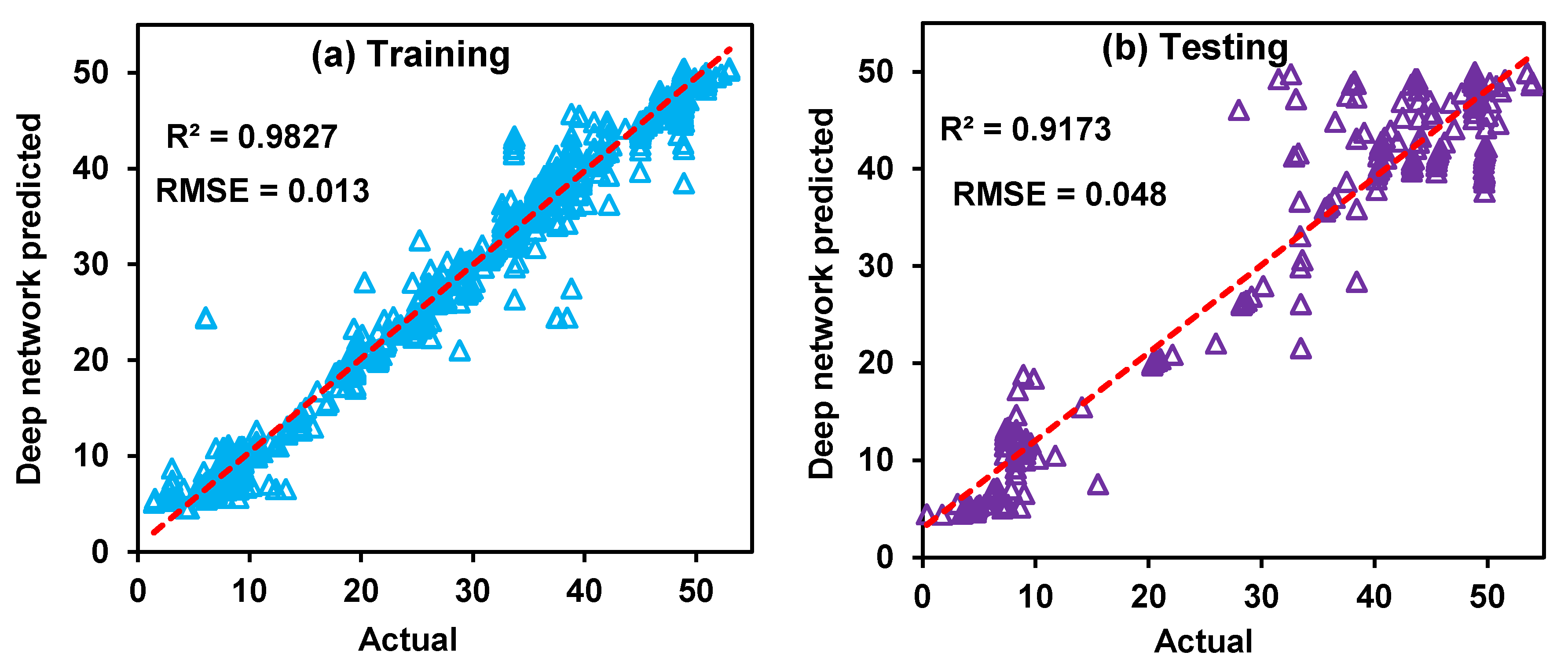
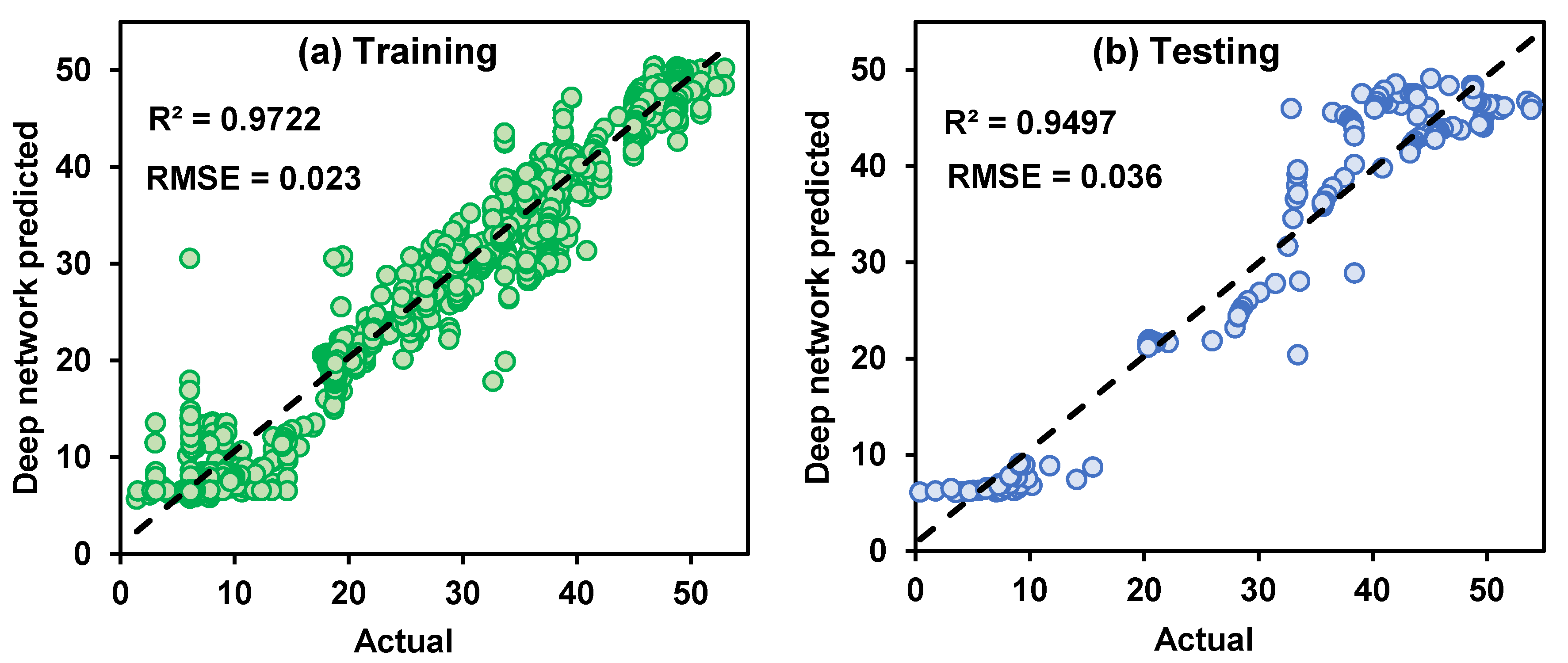
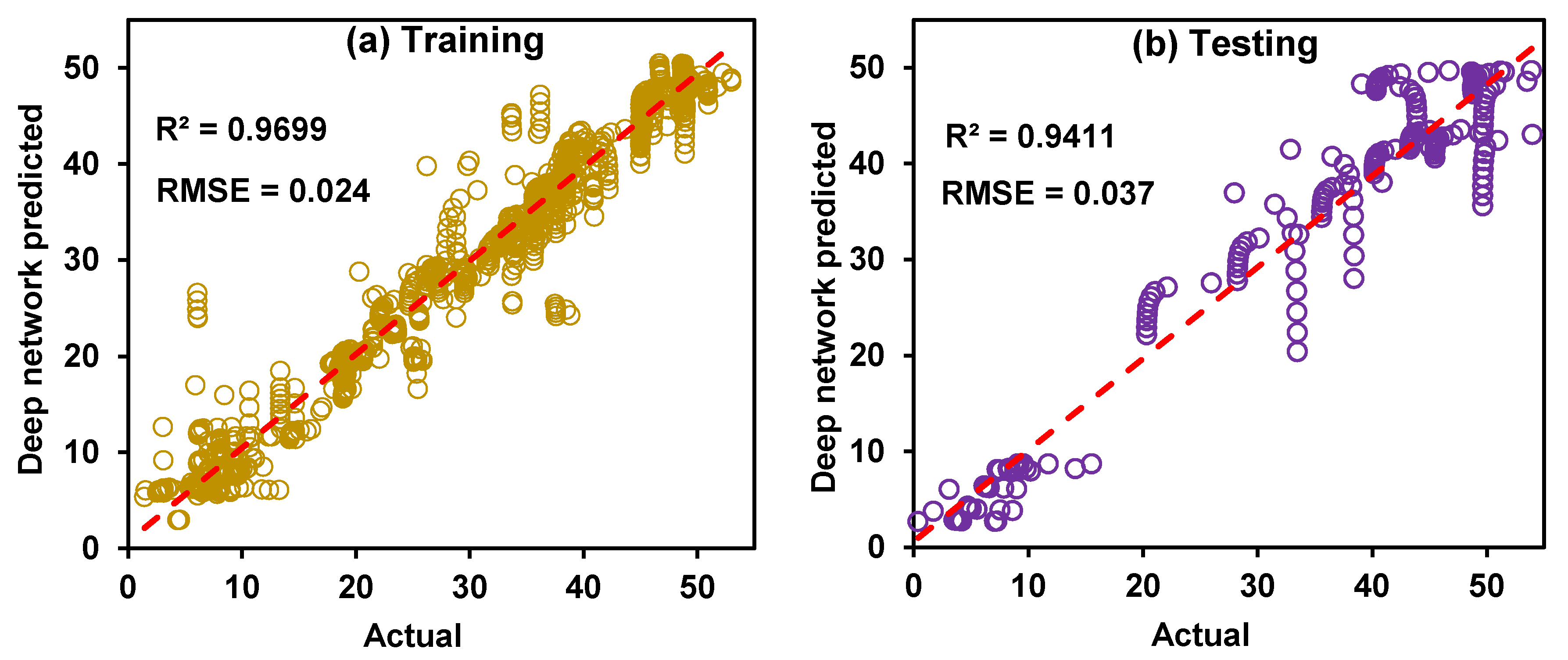
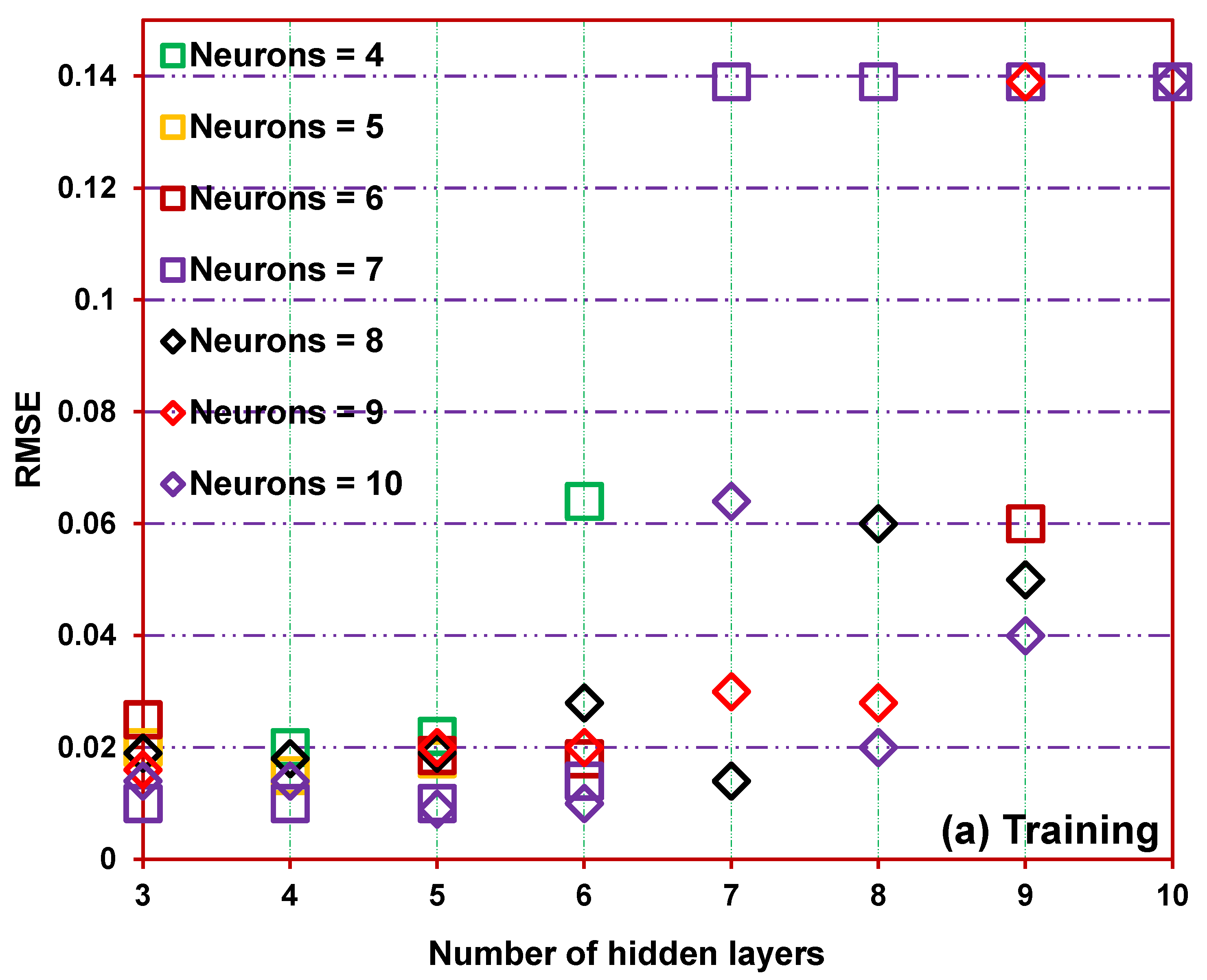
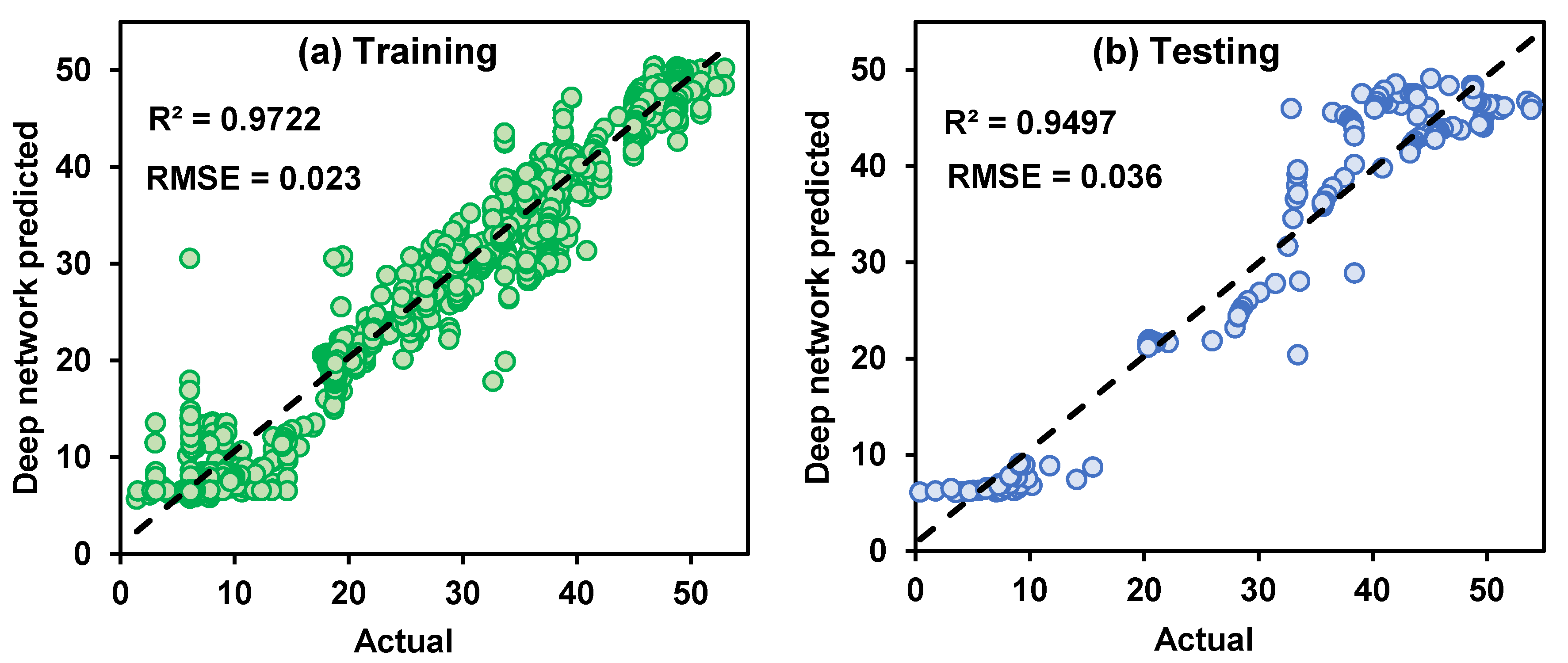
4.2. NND Modelling of Nuavg
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Ar | Aspect ratio of a battery cell | Greek symbols | |
| c | Specific heat in J/kgK | α | Thermal diffusivity of fluid m2/s |
| Thermal conductivity of battery in W/MK | ν | Kinematic viscosity of fluid m2/s | |
| Nuavg | Average Nusselt number | ρ | Density of fluid kg/m3 |
| Volumetric heat generation W/m3 | Acronyms | ||
| Q | Dimensionless volumetric heat generation | BTMS | battery thermal management system |
| Pr | Prandtl number | NN | Neural network |
| Re | Reynolds number | NN1 | Single layered neural network |
| Temperature of battery in K | NND | Deep neural network | |
| Temperature of fluid in K | SIMPLE | Semi-implicit pressure linked equation | |
| Time in seconds | LM | Levenberg–Marquardt | |
| Velocity along the axial direction m/s | AI | Artificial intelligence | |
| p | Pressure in N/m2 | ML | Machine learning |
| x | Axial direction | ANN | Artificial Neural network |
| y | Transverse direction | Li-ion | Lithium-ion |
| R2 | R-squared | ||
| RMSE | Root mean square error | ||
References
- Kolodziejczyk, F.; Mortazavi, B.; Rabczuk, T.; Zhuang, X. Machine learning assisted multiscale modeling of composite phase change materials for Li-ion batteries’ thermal management. Int. J. Heat Mass Transf. 2021, 172, 121199. [Google Scholar] [CrossRef]
- Kleiner, J.; Stuckenberger, M.; Komsiyska, L.; Endisch, C. Real-time core temperature prediction of prismatic automotive lithium-ion battery cells based on artificial neural networks. J. Energy Storage 2021, 39, 102588. [Google Scholar] [CrossRef]
- Benmouna, A.; Becherif, M.; Boulon, L.; Dépature, C.; Ramadan, H.S. Efficient experimental energy management operating for FC/battery/SC vehicles via hybrid Artificial Neural Networks-Passivity Based Control. Renew. Energy 2021, 178, 1291–1302. [Google Scholar] [CrossRef]
- Yetik, O.; Karakoc, T.H. Estimation of thermal effect of different busbars materials on prismatic Li-ion batteries based on artificial neural networks. J. Energy Storage 2021, 38, 102543. [Google Scholar] [CrossRef]
- Jaliliantabar, F.; Mamat, R.; Kumarasamy, S. Prediction of lithium-ion battery temperature in different operating conditions equipped with passive battery thermal management system by artificial neural networks. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Fang, K.; Mu, D.; Chen, S.; Wu, B.; Wu, F. A prediction model based on artificial neural network for surface temperature simulation of nickel–metal hydride battery during charging. J. Power Sources 2012, 208, 378–382. [Google Scholar] [CrossRef]
- Arora, S.; Shen, W.; Kapoor, A. Neural network based computational model for estimation of heat generation in LiFePO4 pouch cells of different nominal capacities. Comput. Chem. Eng. 2017, 101, 81–94. [Google Scholar] [CrossRef]
- Mokashi, I.; Afzal, A.; Khan, S.A.; Abdullah, N.A.; Bin Azami, M.H.; Jilte, R.D.; Samuel, O.D. Nusselt number analysis from a battery pack cooled by different fluids and multiple back-propagation modelling using feed-forward networks. Int. J. Therm. Sci. 2021, 161, 106738. [Google Scholar] [CrossRef]
- Xie, Y.; He, X.; Hu, X.; Li, W.; Zhang, Y.; Liu, B.; Sun, Y. An improved resistance-based thermal model for a pouch lithium-ion battery considering heat generation of posts. Appl. Therm. Eng. 2020, 164, 114455. [Google Scholar] [CrossRef]
- Kim, T.J.; Youn, B.D.; Kim, H.J. Battery Pack Temperature Estimation Model for EVs and Its Semi-transient Case Study. Chem. Eng. Trans. 2013, 33, 955–960. [Google Scholar]
- Chen, S.; Fang, K.-Z.; Mu, D.-B.; Wu, B.-R. Application of neural network model to predicting surface temperature of lithium-ion battery. Trans. Beijing Inst. Technol. 2013, 33, 421–424. [Google Scholar]
- Jiang, Y.; Yu, Y.; Huang, J.; Cai, W.; Marco, J. Li-ion battery temperature estimation based on recurrent neural networks. Sci. China Technol. Sci. 2021, 64, 1335–1344. [Google Scholar] [CrossRef]
- Fan, B.; Lin, C.; Wang, F.; Liu, S.; Liu, L.; Xu, S. An Adaptive Neuro-Fuzzy Inference System (ANFIS) Based Model for the Temperature Prediction of Lithium-Ion Power Batteries. SAE Int. J. Passeng. Cars-Electron. Electr. Syst. 2018, 12, 5–11. [Google Scholar]
- Park, J.; Kim, Y. Supervised-learning-based optimal thermal management in an electric vehicle. IEEE Access 2019, 8, 1290–1302. [Google Scholar]
- Warey, A.; Kaushik, S.; Khalighi, B.; Cruse, M.; Venkatesan, G. Data-driven prediction of vehicle cabin thermal comfort: Using machine learning and high-fidelity simulation results. Int. J. Heat Mass Transf. 2020, 148, 119083. [Google Scholar]
- Tang, X.; Guo, Q.; Li, M.; Wei, C.; Pan, Z.; Wang, Y. Performance analysis on liquid-cooled battery thermal management for electric vehicles based on machine learning. J. Power Sources 2021, 494, 229727. [Google Scholar] [CrossRef]
- Yang, R.; Xiong, R.; Shen, W.; Lin, X. Extreme learning machine-based thermal model for lithium-ion batteries of electric vehicles under external short circuit. Engineering 2021, 7, 395–405. [Google Scholar]
- Fan, Y.; Xu, K.; Wu, H.; Zheng, Y.; Tao, B. Spatiotemporal modeling for nonlinear distributed thermal processes based on KL decomposition, MLP and LSTM network. IEEE Access 2020, 8, 25111–25121. [Google Scholar]
- Wen, J.; Zou, Q.; Wei, Y. Physics-driven machine learning model on temperature and time-dependent deformation in lithium metal and its finite element implementation. J. Mech. Phys. Solids 2021, 153, 104481. [Google Scholar] [CrossRef]
- Feng, F.; Teng, S.; Liu, K.; Xie, J.; Xie, Y.; Liu, B.; Li, K. Co-estimation of lithium-ion battery state of charge and state of temperature based on a hybrid electrochemical-thermal-neural-network model. J. Power Sources 2020, 455, 227935. [Google Scholar] [CrossRef]
- Park, T.-R.; Park, H.; Kim, K.; Im, C.-N.; Cho, J.-H. Heat and weight optimization methodology of thermal batteries by using deep learning method with multi-physics simulation. Energy Convers. Manag. 2021, 236, 114033. [Google Scholar]
- Afzal, A.; Mohammed Samee, A.D.; Abdul Razak, R.K.; Ramis, M.K. Effect of spacing on thermal performance characteristics of Li-ion battery cells. J. Therm. Anal. Calorim. 2019, 135, 1797–1811. [Google Scholar] [CrossRef]
- Afzal, A.; Saleel, C.A.; Suvanjan, K.P.; Mohammed, B. Parallel finite volume method - based fluid flow computations using OpenMP and CUDA applying different schemes. J. Therm. Anal. Calorim. 2021, 145, 1891–1909. [Google Scholar] [CrossRef]
- Afzal, A.; Ansari, Z.; Ramis, M.K. Parallelization of Numerical Conjugate Heat Transfer Analysis in Parallel Plate Channel Using OpenMP. Arab. J. Sci. Eng. 2020, 45, 8981–8997. [Google Scholar] [CrossRef]
- Afzal, A.; Samee, A.D.M.; Razak, R.K.A.; Ramis, M.K. Thermal management of modern electric vehicle battery systems (MEVBS). J. Therm. Anal. Calorim. 2020, 144, 1271–1285. [Google Scholar] [CrossRef]
- Afzal, A.; Mokashi, I.; Khan, S.A.; Abdullah, N.A.; Azami, M.H.B. Optimization and analysis of maximum temperature in a battery pack affected by low to high Prandtl number coolants using response surface methodology and particle swarm optimization algorithm. Numer. Heat Transf. Part A Appl. 2020, 79, 406–435. [Google Scholar] [CrossRef]
- Afzal, A.; Abidi, A.; Samee, A.; Razak, R.; Soudagar, M.; Saleel, A. Effect of parameters on thermal and fluid flow behavior of battery thermal management system. Therm. Sci. 2020, 25, 3775–3787. [Google Scholar] [CrossRef]
- Mokashi, I.; Khan, S.A.; Abdullah, N.A.; Azami, M.H.; Afzal, A. Maximum temperature analysis in a Li-ion battery pack cooled by different fluids. J. Therm. Anal. Calorim. 2020, 141, 2555–2571. [Google Scholar] [CrossRef]
- Afzal, A.; Razak, A.; Jilte, R.D.; Ibrahim, M.; Kumar, R.; Mujtaba, M.A.; Alshahrani, S.; Saleel, C.A. Thermal modelling and characteristic evaluation of electric vehicle battery system. Case Stud. Therm. Eng. 2021, 26, 101058. [Google Scholar] [CrossRef]
- Haykin, S.S. Neural Networks and Learning Machines/Simon Haykin; Prentice Hall: New York, NY, USA, 2009. [Google Scholar]
- MI, L. A brief description of the Levenberg-Marquardt algorithm implemented by levmar. Found. Res. Technol. 2005, 77, 1–6. [Google Scholar]
- Afzal, A.; Ramis, M.K. Multi-objective optimization of thermal performance in battery system using genetic and particle swarm algorithm combined with fuzzy logics. J. Energy Storage 2020, 32, 101815. [Google Scholar] [CrossRef]
- Afzal, A.; Samee, A.D.M.; Jilte, R.D.; Islam, T.; Manokar, A.M.; Abdul, K. Battery thermal management: An optimization study of parallelized conjugate numerical analysis using Cuckoo search and Artificial bee colony algorithm. Int. J. Heat Mass Transf. 2021, 166, 120798. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Activation Function | Equation | Graph |
|---|---|---|
| Sigmoid |  | |
| Tan hyperbolic (Tanh) | 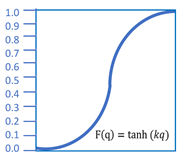 | |
| Gaussian | 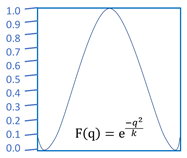 | |
| Linear | 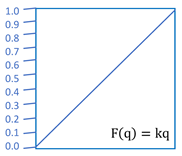 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Afzal, A.; Bhutto, J.K.; Alrobaian, A.; Razak Kaladgi, A.; Khan, S.A. Modelling and Computational Experiment to Obtain Optimized Neural Network for Battery Thermal Management Data. Energies 2021, 14, 7370. https://doi.org/10.3390/en14217370
Afzal A, Bhutto JK, Alrobaian A, Razak Kaladgi A, Khan SA. Modelling and Computational Experiment to Obtain Optimized Neural Network for Battery Thermal Management Data. Energies. 2021; 14(21):7370. https://doi.org/10.3390/en14217370
Chicago/Turabian StyleAfzal, Asif, Javed Khan Bhutto, Abdulrahman Alrobaian, Abdul Razak Kaladgi, and Sher Afghan Khan. 2021. "Modelling and Computational Experiment to Obtain Optimized Neural Network for Battery Thermal Management Data" Energies 14, no. 21: 7370. https://doi.org/10.3390/en14217370
APA StyleAfzal, A., Bhutto, J. K., Alrobaian, A., Razak Kaladgi, A., & Khan, S. A. (2021). Modelling and Computational Experiment to Obtain Optimized Neural Network for Battery Thermal Management Data. Energies, 14(21), 7370. https://doi.org/10.3390/en14217370