Quasi-Z-Source Inverter-Based Photovoltaic Power System Modeling for Grid Stability Studies




Abstract
:1. Introduction
- Simulation tools, fully developed for implementation, based on Matlab/Simulink and PSCAD/EMTDC small-signal state-space averaged models of qZSI-based PV power systems which include all their components and controls.
- An exhaustive study about the influence of qZSI-based PV power system parameters on stability.
- Solutions to improve qZSI-based PV power system stability.
2. QZSI-Based PV Power Systems
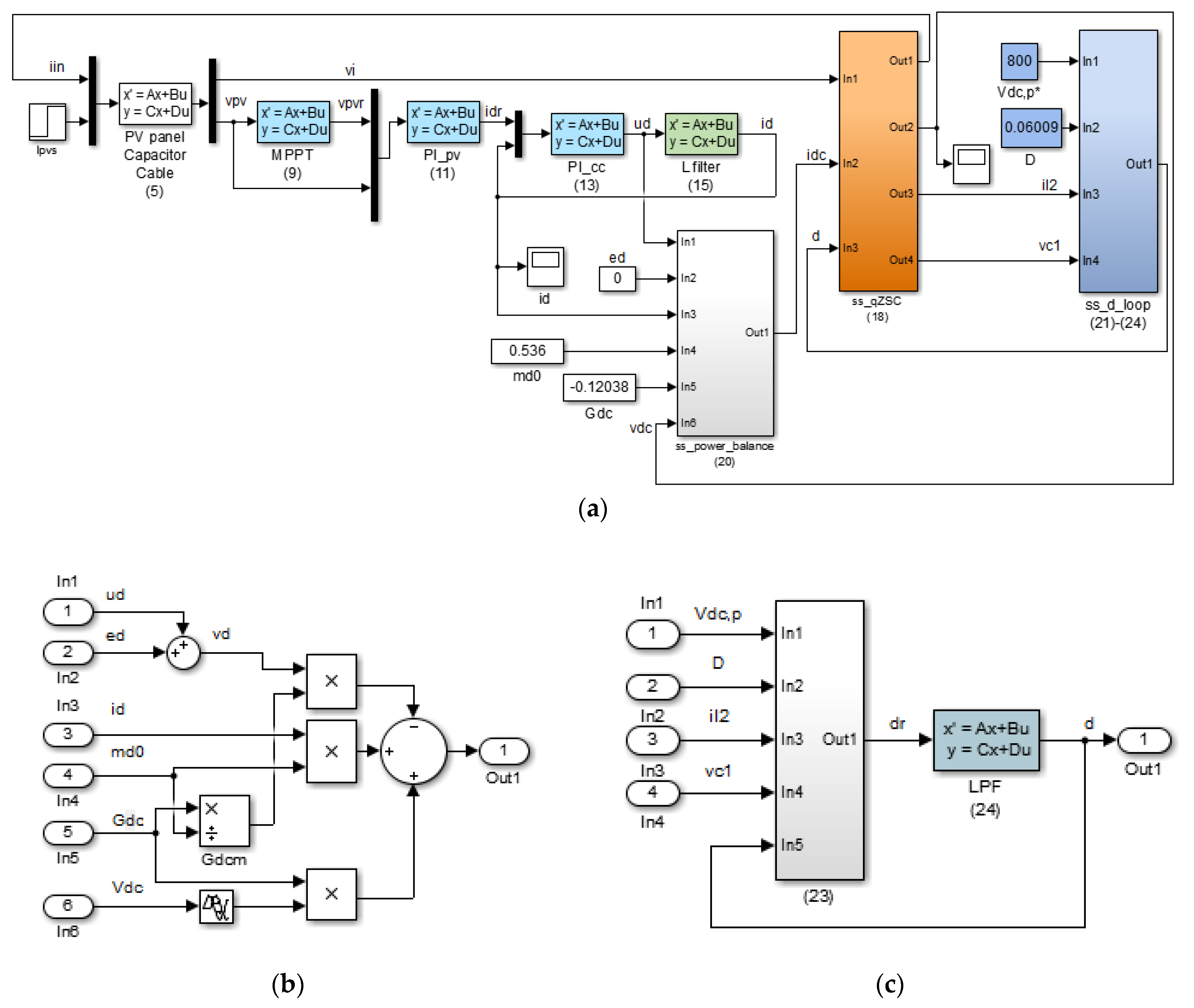
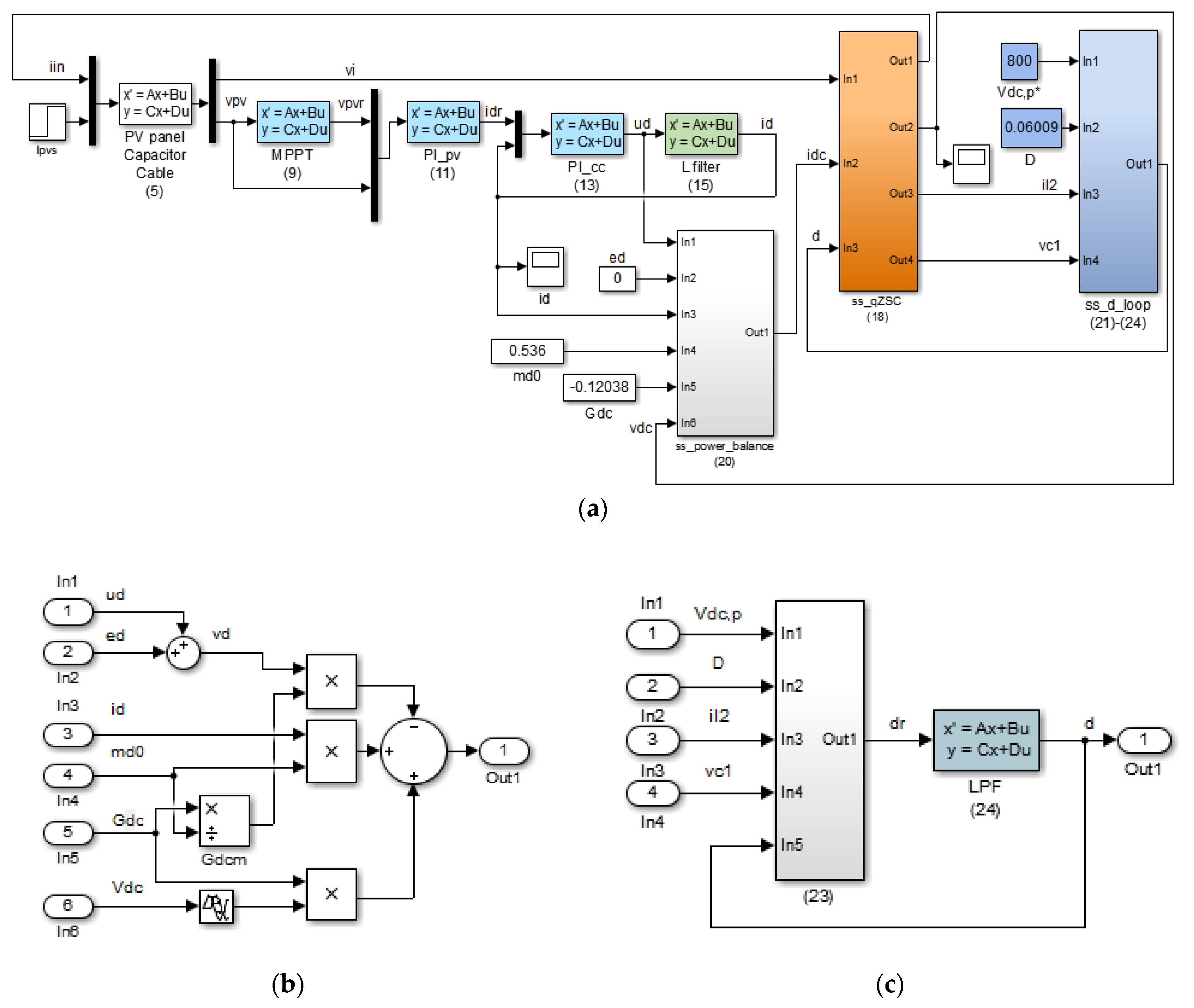
3. Matlab/Simulink Model of the qZSI-Based PV Power System
3.1. PV Installation Modeling
3.2. PV Panel Voltage Control and Grid-Connected VSI Modeling
3.3. qZSI Modeling
3.3.1. Power Circuit Model
- Shoot-through state: The matrices of the state-space model in this interval are
- Non-shoot-through state: The matrices of the state-space model in this interval are
3.3.2. Duty Cycle Control Model
4. PSCAD/EMTDC Model
5. Applications
- The influence of the inductors L1 and L2 and the capacitors C1 and C2 on qZSI dynamic behavior [9] can be extended to qZSI-based PV power system dynamic behavior: Inductors and capacitors have a high and low impact on the dynamic response, respectively. However, unlike [9], the present study differentiates the value of both inductors and concludes that the increase of L1 may improve qZSI-based PV power system stability.
- The detailed analysis of the present study shows the impact of the qZSI-based PV power system operating point on instabilities, in particular high and low values of the active power P flowing through the VSI and the steady-state qZSI output voltage Vdc, respectively. The latter is directly related to the negative impact of high values of the duty cycle control in [22,23].
6. Conclusions
- The operating point is the main factor related to system stability. In particular,
- ○
- The increase of active power flowing through the VSI, which directly depends on the irradiance level and the number of PV panels in parallel, can lead to system stability loss.
- ○
- The dc-link peak voltage also affects system stability. According to this, the increase of the dc-link peak voltage reference may be used to enhance stability because it mitigates the impact of active power flowing through the VSI.
- The qZSI component design is important for upgrading PV power system stability. In particular, low values of L2, C2 and high values of L1, C1 can help to make the system more stable.
- Other PV power system parameters such as the PV panel shunt capacitor Cp and the DC cable Rc could help to improve stability if they take high values.
- PV installation, qZSI, PV control, and D control parameters have little influence on system stability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Fu, Q.; Montoya, L.F.; Solanki, A.; Nasiri, A.; Bhavaraju, V.; Abdallah, T.; David, C.Y. Microgrid generation capacity design with renewables and energy storage addressing power quality and surety. IEEE Trans. Smart Grid 2012, 3, 2019–2027. [Google Scholar] [CrossRef]
- Walker, G. Evaluating MPPT converter topologies using a Matlab PV Model. J. Electr. Electron. Eng. 2001, 21, 49–55. [Google Scholar]
- Liu, S.; Liu, P.X.; Wang, X. Stochastic small-signal stability analysis of grid-connected photovoltaic systems. IEEE Trans. Ind. Electron. 2016, 63, 1027–1038. [Google Scholar] [CrossRef]
- Degner, T.; Schmid, J.; Strauss, P. Distributed generation with high penetration of renewable energy sources. In Final Public Report of Dispower Project; Institut Fuer Solare Energieversorgungstechnik E.VL: Kassel, Germany, 2006; ISBN 3-00-016584-3. [Google Scholar]
- Pokharel, M.; Ghosh, A.; Man Ho, C.N. Small-signal modelling and design validation of PV-controllers with INC-MPPT using CHIL. IEEE Trans. Energy Convers. 2019, 34, 361–370. [Google Scholar] [CrossRef]
- Liu, Y.; Ge, B.; Abu-Rub, H.; Peng, F.Z. An effective control method for quasi-Z-source cascade multilevel inverter-based grid-tie single-phase photovoltaic power system. IEEE Trans. Ind. Inform. 2014, 10, 399–407. [Google Scholar] [CrossRef]
- Serban, E.; Ordonez, M.; Pondiche, C. DC-bus voltage range extension in 1500 V photovoltaic inverters. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 901–917. [Google Scholar] [CrossRef]
- Siwakoti, Y.P.; Peng, F.Z.; Blaabjerg, F.; Loh, P.C.; Town, G.E. Impedance-source networks for electric power conversion Part I: A topological review. IEEE Trans. Power Electron. 2015, 30, 699–716. [Google Scholar] [CrossRef]
- Siwakoti, Y.P.; Peng, F.Z.; Blaabjerg, F.; Loh, P.C.; Town, G.E.; Yang, S. Impedance-source networks for electric power conversion part II: Review of control and modulation techniques. IEEE Trans. Power Electron. 2015, 30, 1887–1906. [Google Scholar] [CrossRef]
- Husev, O.; Blaabjerg, F.; Roncero-Clemente, C.; Romero-Cadaval, E.; Vinnikov, D.; Siwatoki, Y.; Strzelecki, R. Comparison of impedance-source networks for two and multilevel buck–boost inverter applications. IEEE Trans. Power Electron. 2016, 31, 7564–7579. [Google Scholar] [CrossRef]
- Liu, Y.; Abu-Rub, H.; Ge, B.; Blaabjerg, F.; Ellaban, O.; Chiang, P. Impedance Source Power Electronic Converters; John Wiley and Sons-IEEE Press: Chichester, UK, 2016. [Google Scholar]
- Liu, J.; Hu, J.; Xu, L. Dynamic modeling and analysis of Z-source converter-derivation of AC small signal model and design-oriented analysis. IEEE Trans. Power Electron. 2007, 22, 1786–1796. [Google Scholar] [CrossRef]
- Li, Y.; Anderson, J.; Peng, F.Z.; Liu, D. Quasi-Z-source inverter for photovoltaic power generation systems. In Proceedings of the 2009 Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 February 2009; pp. 918–924. [Google Scholar]
- Liu, Y.; Ge, B.; Ferreira, F.J.T.E.; de Almeida, A.T.; Abu-Rub, H. Modeling and SVPWM control of quasi-Z-source inverter. In Proceedings of the 11th International Conference on Electrical Power Quality and Utilisation (EPQU), Lisbon, Portugal, 17–19 October 2011; pp. 1–7. [Google Scholar]
- Anderson, J.; Peng, F.Z. Four quasi-Z-Source inverters. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 2743–2749. [Google Scholar]
- Roncero-Clemente, C.; Romero-Cadaval, E.; Husev, O.; Vinnikov, D.; Stepenko, S. Simulation of grid connected three-level neutral-point-clamped qZS inverter using PSCAD. Electr. Control Commun. Eng. 2013, 2, 14–20. [Google Scholar] [CrossRef] [Green Version]
- Husev, O.; Roncero-Clemente, C.; Stepenko, S.; Vinnikov, D.; Romero-Cadaval, E. CCM operation analysis of the single-phase three-level quasi-Z-source inverter. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. DS1b.21-1–DS1b.21-6. [Google Scholar]
- Tan, Y.; Kirschen, D.; Jenkins, N. A model of PV generation suitable for stability analysis. IEEE Trans. Energy Convers. 2004, 19, 748–755. [Google Scholar] [CrossRef]
- Xue, Y.; Manjrekar, M.; Lin, C.; Tamayo, M.; Jiang, J. Voltage stability and sensitivity analysis of grid-connected photovoltaic systems. In Proceedings of the IEEE PES General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–7. [Google Scholar]
- Castiglia, V.; Miceli, R.; Blaabjerg, F.; Yang, Y. Small-signal modeling and experimental validation of the three-phase quasi-Z-source inverter. In Proceedings of the 2020 IEEE 21st Workshop on Control and Modeling for Power Electronics (COMPEL), Aalborg, Denmark, 9–12 November 2020; pp. 1–8. [Google Scholar]
- Stepenko, S.; Husev, O.; Vinnikov, D.; Roncero-Clemente, C.; Pimentel, S.P.; Santasheva, E. Experimental comparison of two-level full-SiC and three-level Si–SiC quasi-Z-source inverters for PV applications. Energies 2019, 12, 2509. [Google Scholar] [CrossRef] [Green Version]
- Liang, Z.; Hu, S.; Yang, H.; He, X. Synthesis and design of the AC current controller and impedance network for the quasi-Z-source converter. IEEE Trans. Ind. Electron. 2018, 65, 8287–8296. [Google Scholar] [CrossRef]
- Liu, W.; Yang, Y.; Kerekes, T.; Liivik, E.; Blaabjerg, F. Impedance network impact on the controller design of the QZSI for PV applications. In Proceedings of the 2020 IEEE 21st Workshop on Control and Modeling for Power Electronics (COMPEL), Aalborg, Denmark, 9–12 November 2020; pp. 1–6. [Google Scholar]
- Oliveira-Assis, L.; Soares-Ramos, E.P.P.; Sarrias-Mena, R.; García-Triviño, P.; Fernández-Ramírez, L.M. Large-scale grid connected quasi-Z-source inverter-based PV power plant. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar]
- Husev, O.; Vinnikov, D.; Roncero-Clemente, C.; Chub, A.; Romero-Cadaval, E. Single-phase string solar qZS-based inverter: Example of multi-objective optimization design. IEEE Trans. Ind. Appl. 2020. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Circuit and Control | Parameters | Data |
|---|---|---|
| PV array | Np × Ns | 55 × 42 |
| G, T | 0.5 Sun, 25 °C | |
| PV installation | Rc, Cp | 0.0667 Ω, 10 mF |
| qZSI source network | L1 = L2, r1 = r2 | 0.3 mH, 0.011 Ω |
| C1 = C2, R1 = R2 | 3 mF, 0.006 Ω | |
| fsw | 10 kHz | |
| VSI | Rf, Lf | ≈0 Ω, 0.4 mH |
| MPPT control | , | 0.01 Ω, 0.5 Ω/s |
| PV control | , | 1.8 Ω−1, 75 Ω−1/s |
| CC control | , | 0.424 Ω−1, 150 Ω−1/s |
| D control | 800 V | |
| , | 0.016 V−1, 125 V−1/s | |
| 10−4A−1 |
| Circuit Parameters | Control Parameters | ||||||
|---|---|---|---|---|---|---|---|
| Sensitivity | Sensitivity | ||||||
| Circuit | Parameters | Eigenvalues | Stability | Control | Parameters | Eigenvalues | Stability |
| PV installation | Cp | Low | Low | MPPT | Null | Null | |
| Rc | Medium | Low | Null | Null | |||
| qZSI source network | L1 | Medium | Low | PV | Low | Null | |
| L2 | High | High | Null | Null | |||
| C1 | Medium | Low | CC | High | Null | ||
| C2 | Medium | Low | High | Null | |||
| Grid | Lf | Medium | Null | D | Low | Medium | |
| ed | Null | Null | Null | Null | |||
| PV array | Ipvs = 2I·mpp | Medium | High | Null | Null | ||
| Rpv = Rmpp | Null | Null | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monjo, L.; Sainz, L.; Mesas, J.J.; Pedra, J. Quasi-Z-Source Inverter-Based Photovoltaic Power System Modeling for Grid Stability Studies. Energies 2021, 14, 508. https://doi.org/10.3390/en14020508
Monjo L, Sainz L, Mesas JJ, Pedra J. Quasi-Z-Source Inverter-Based Photovoltaic Power System Modeling for Grid Stability Studies. Energies. 2021; 14(2):508. https://doi.org/10.3390/en14020508
Chicago/Turabian StyleMonjo, Lluís, Luis Sainz, Juan José Mesas, and Joaquín Pedra. 2021. "Quasi-Z-Source Inverter-Based Photovoltaic Power System Modeling for Grid Stability Studies" Energies 14, no. 2: 508. https://doi.org/10.3390/en14020508
APA StyleMonjo, L., Sainz, L., Mesas, J. J., & Pedra, J. (2021). Quasi-Z-Source Inverter-Based Photovoltaic Power System Modeling for Grid Stability Studies. Energies, 14(2), 508. https://doi.org/10.3390/en14020508