
An Anti-Fluctuation Compensator Design and Its Control Strategy for Wind Farm System



Abstract
:
1. Introduction
2. STATCOM Mathematical Model and Control Strategy
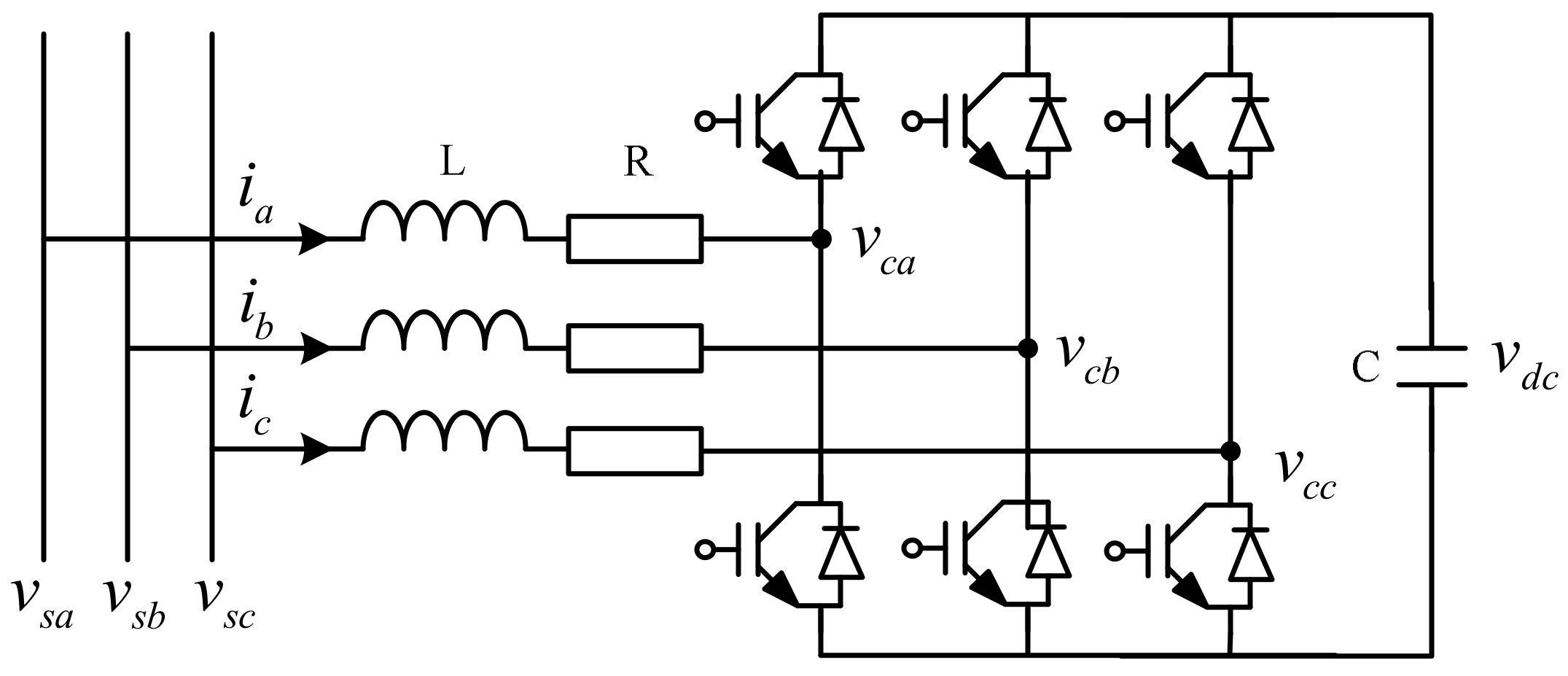
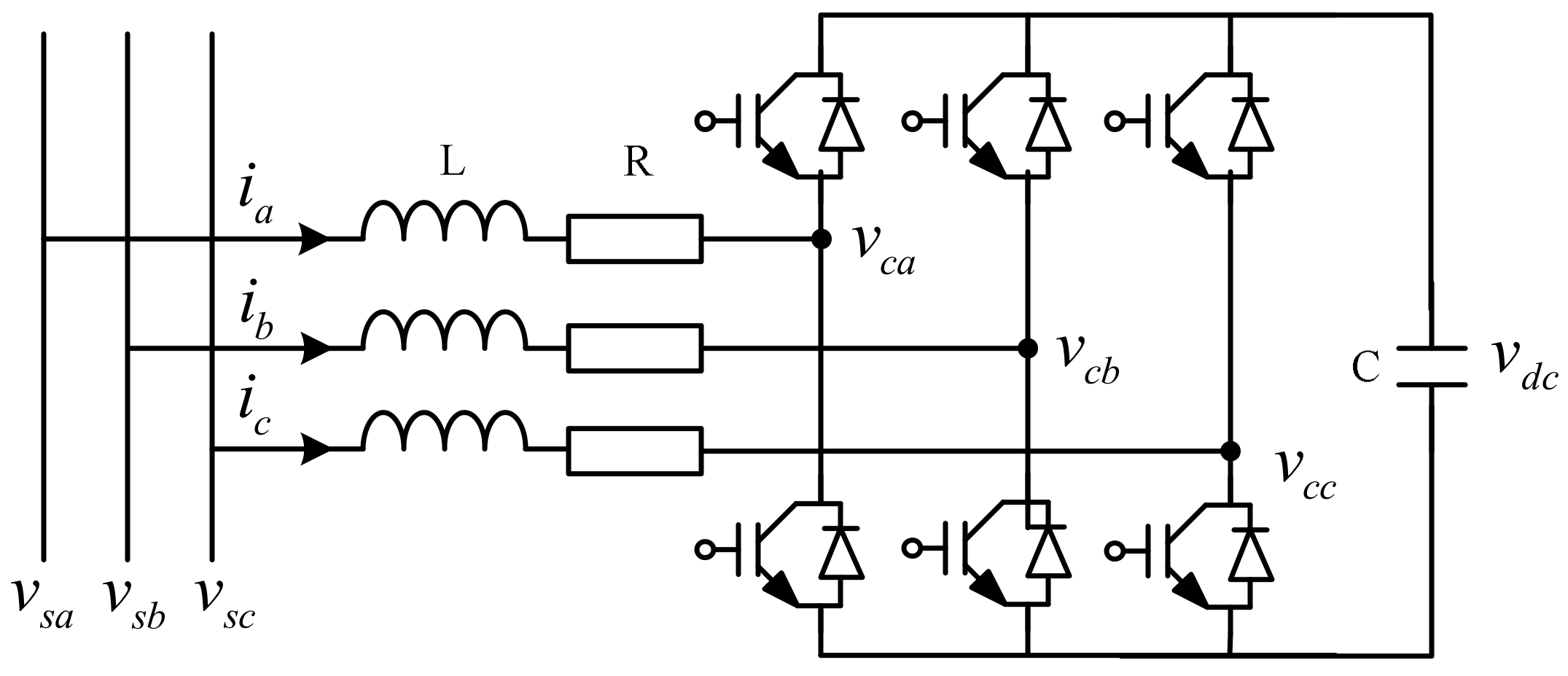
2.1. Mathematical Model
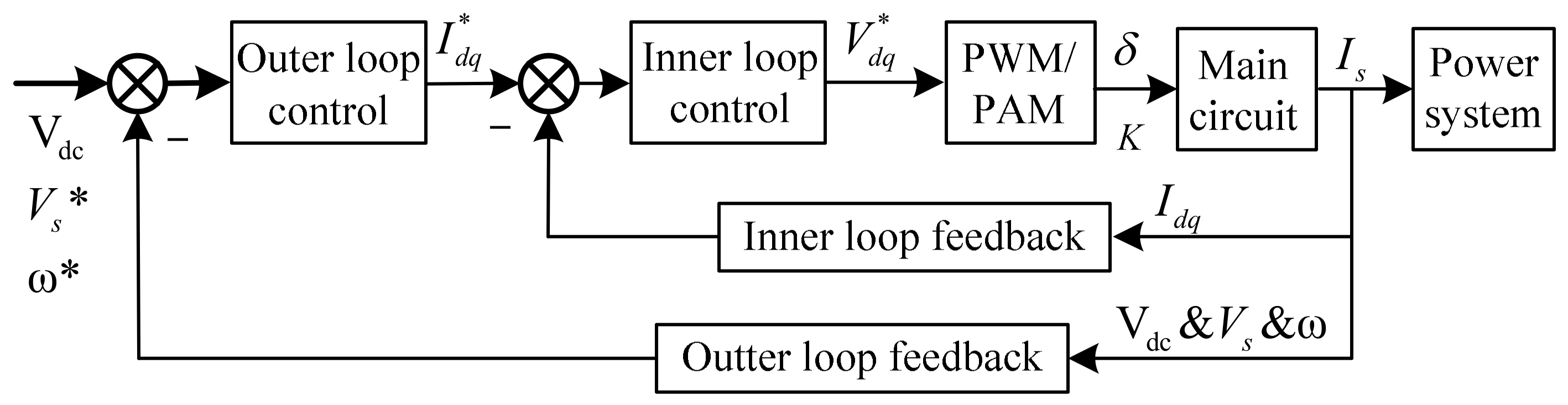
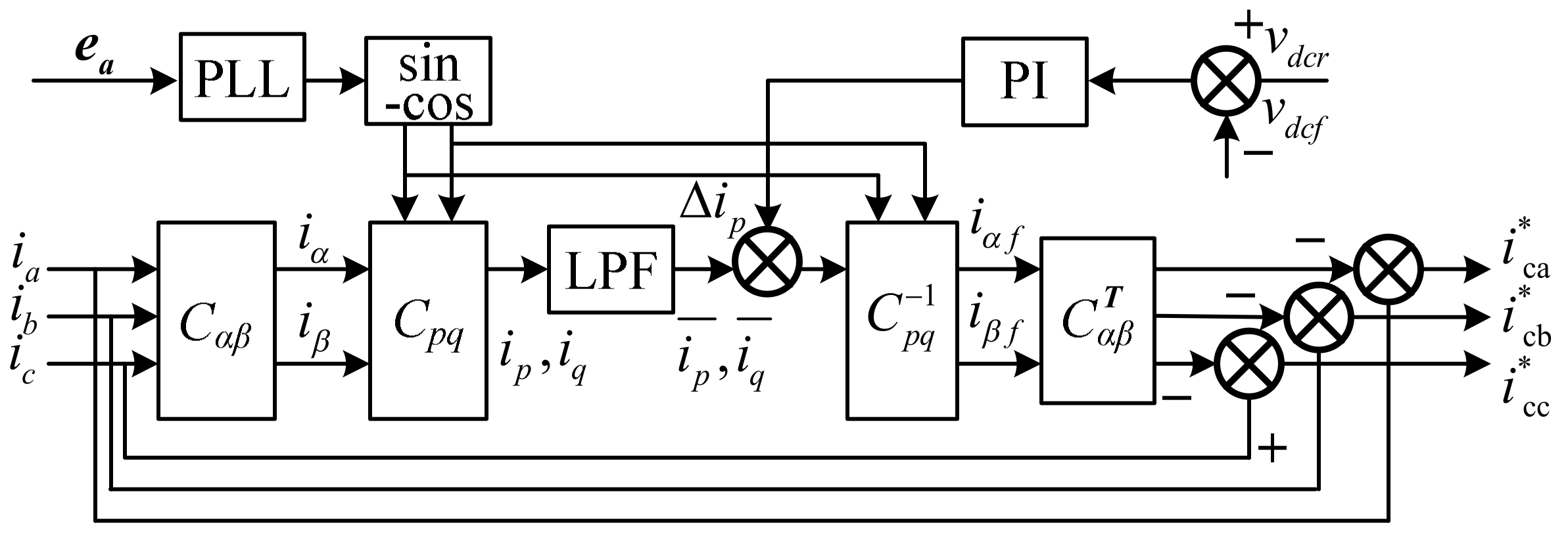
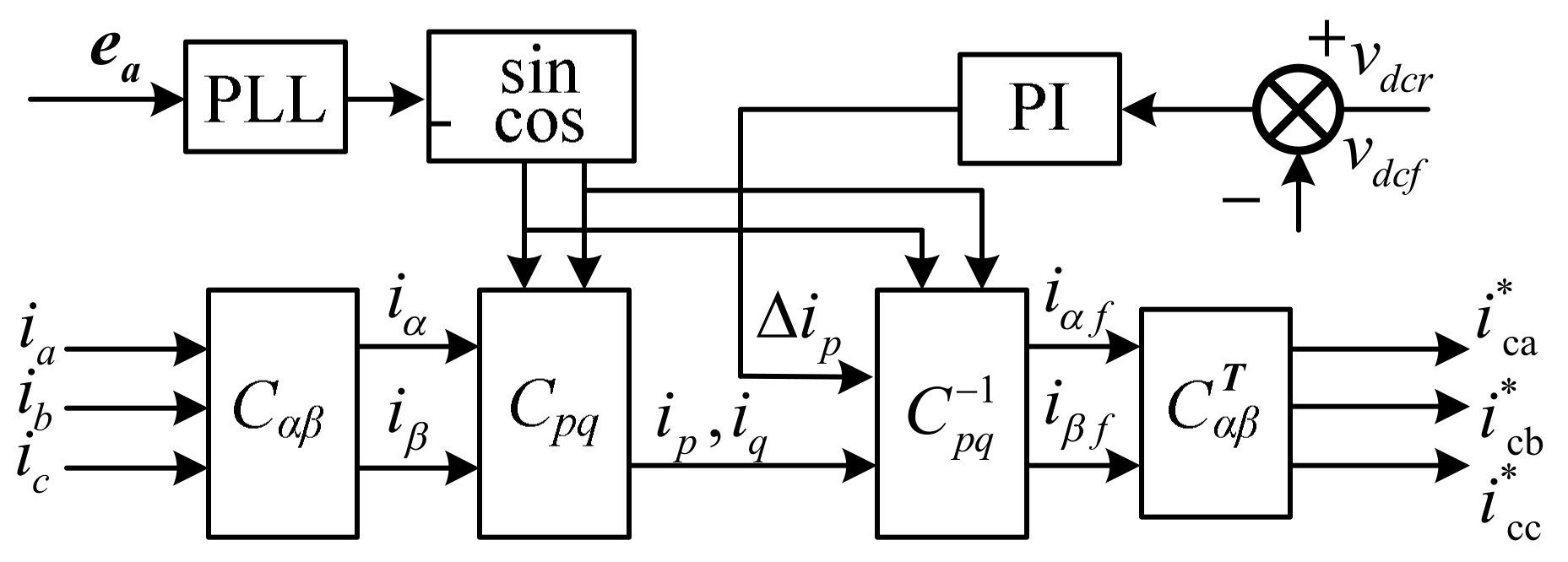
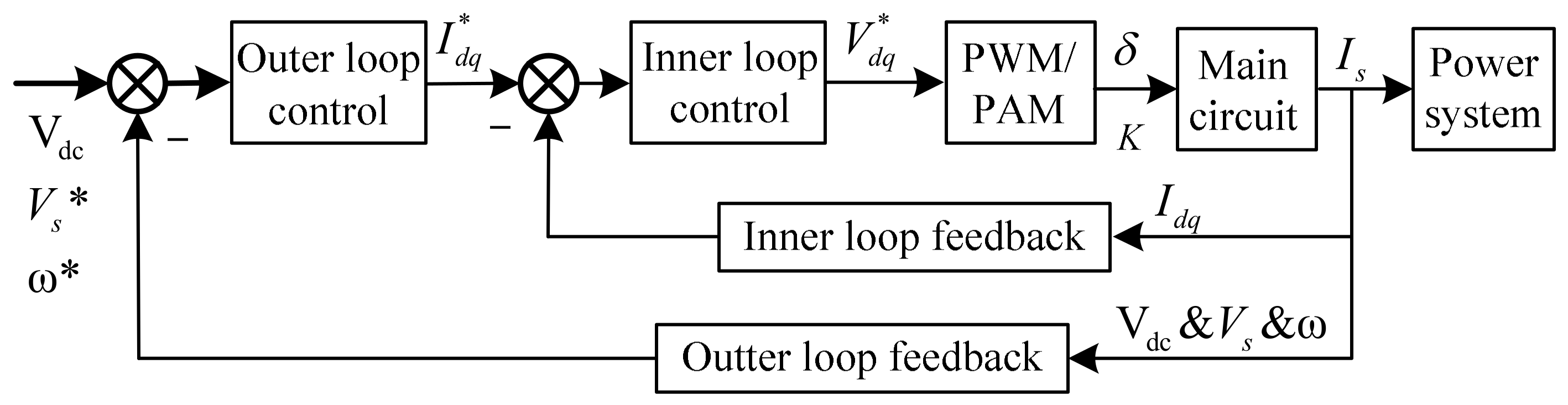
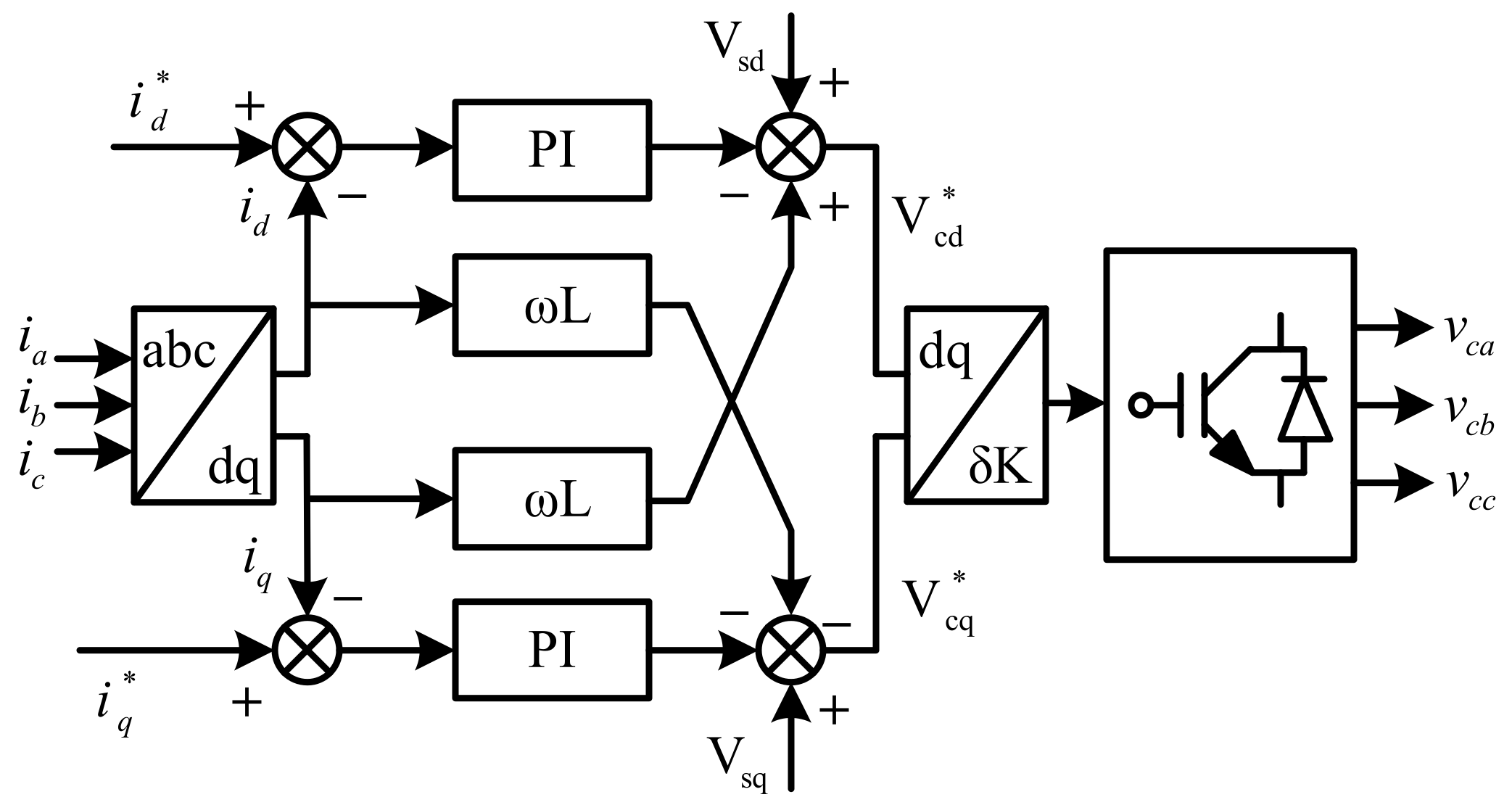
2.2. Decoupling Dual-loop Current Control
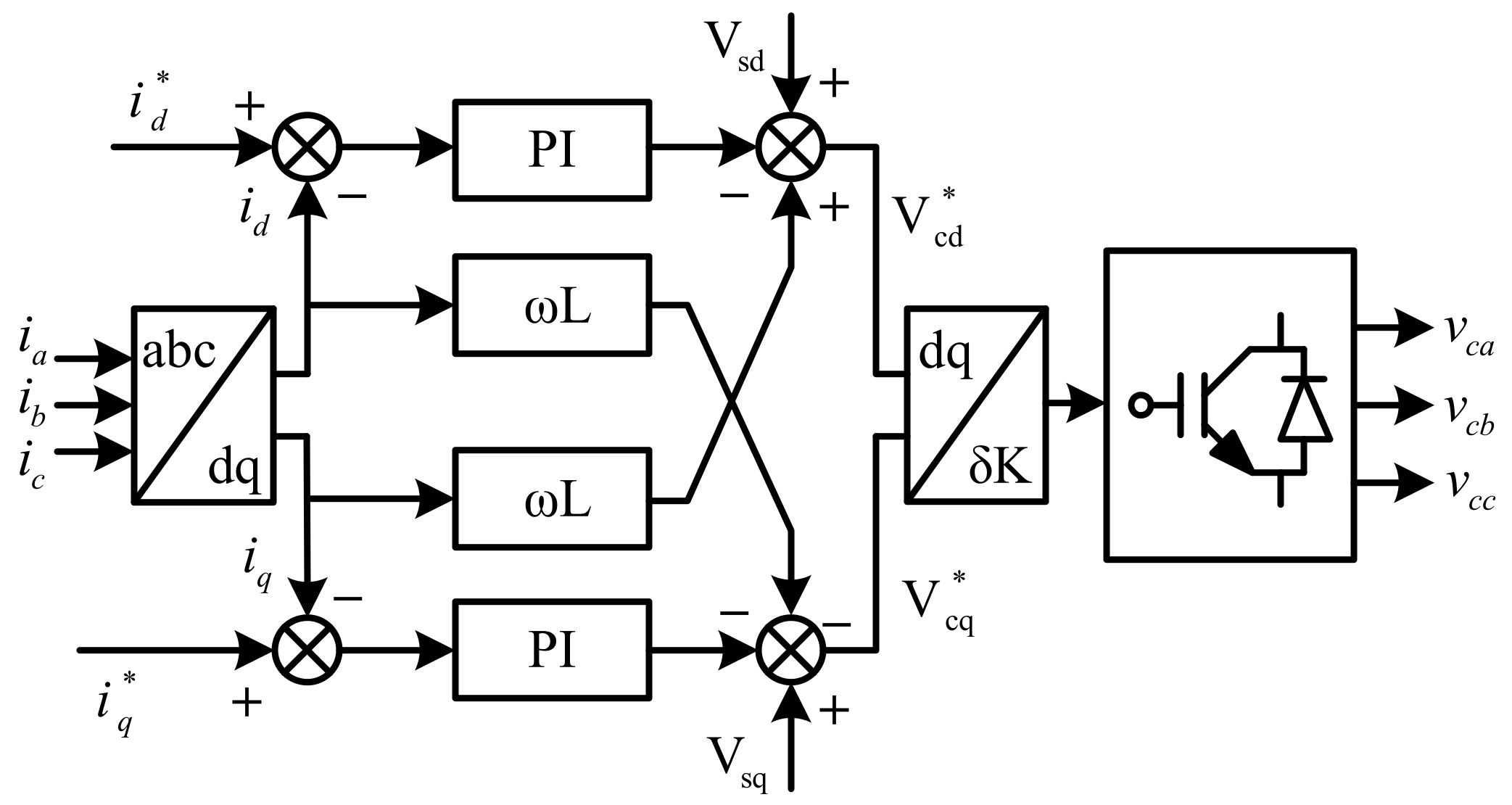
2.2.1. Inner Loop Current Control
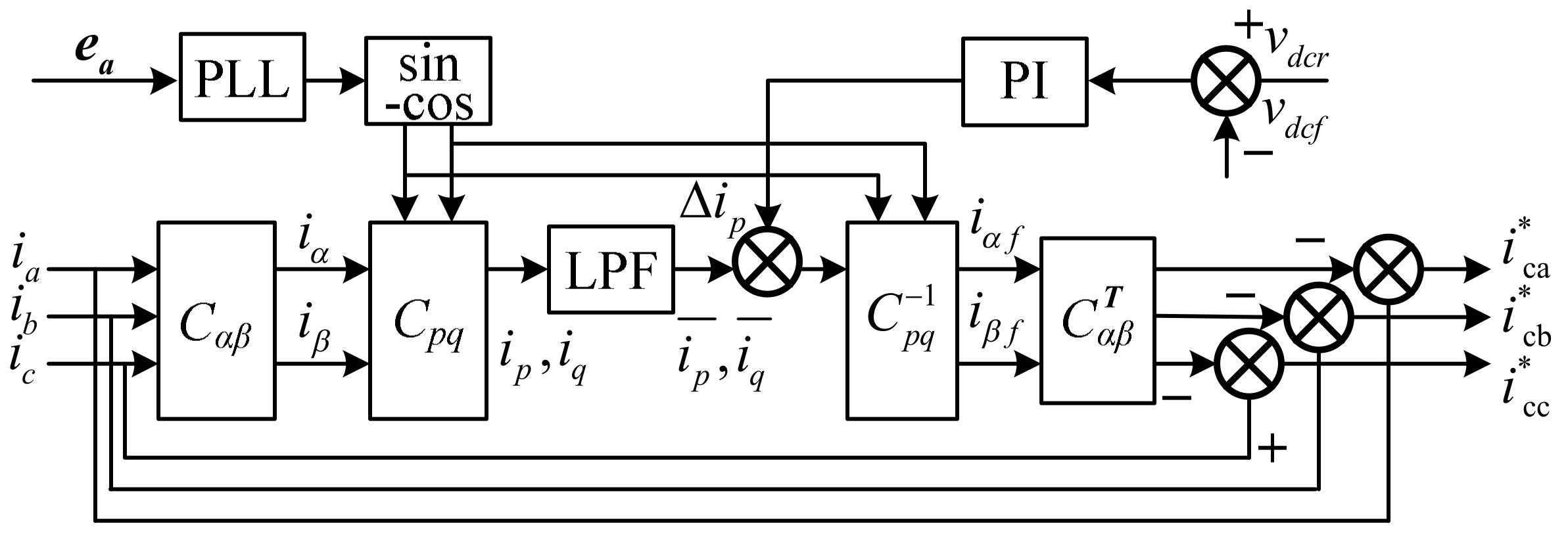
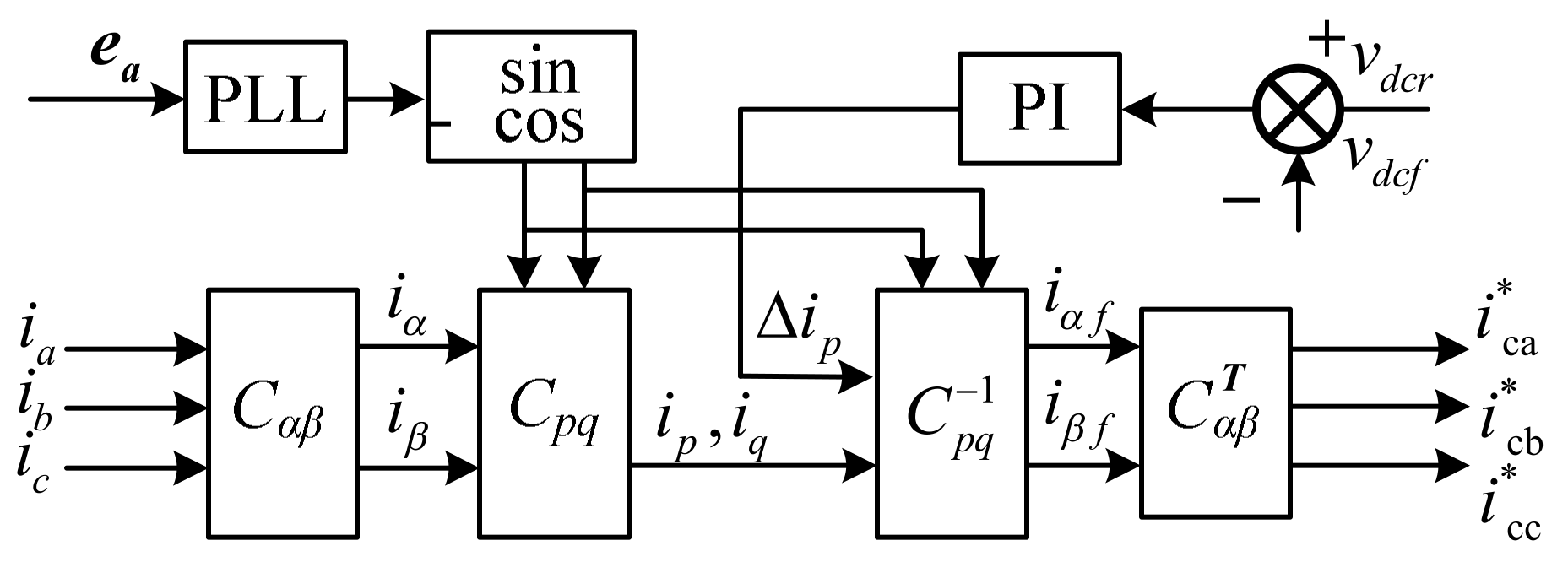
2.2.2. Current Instruction Generation for Outer Loop Current Control
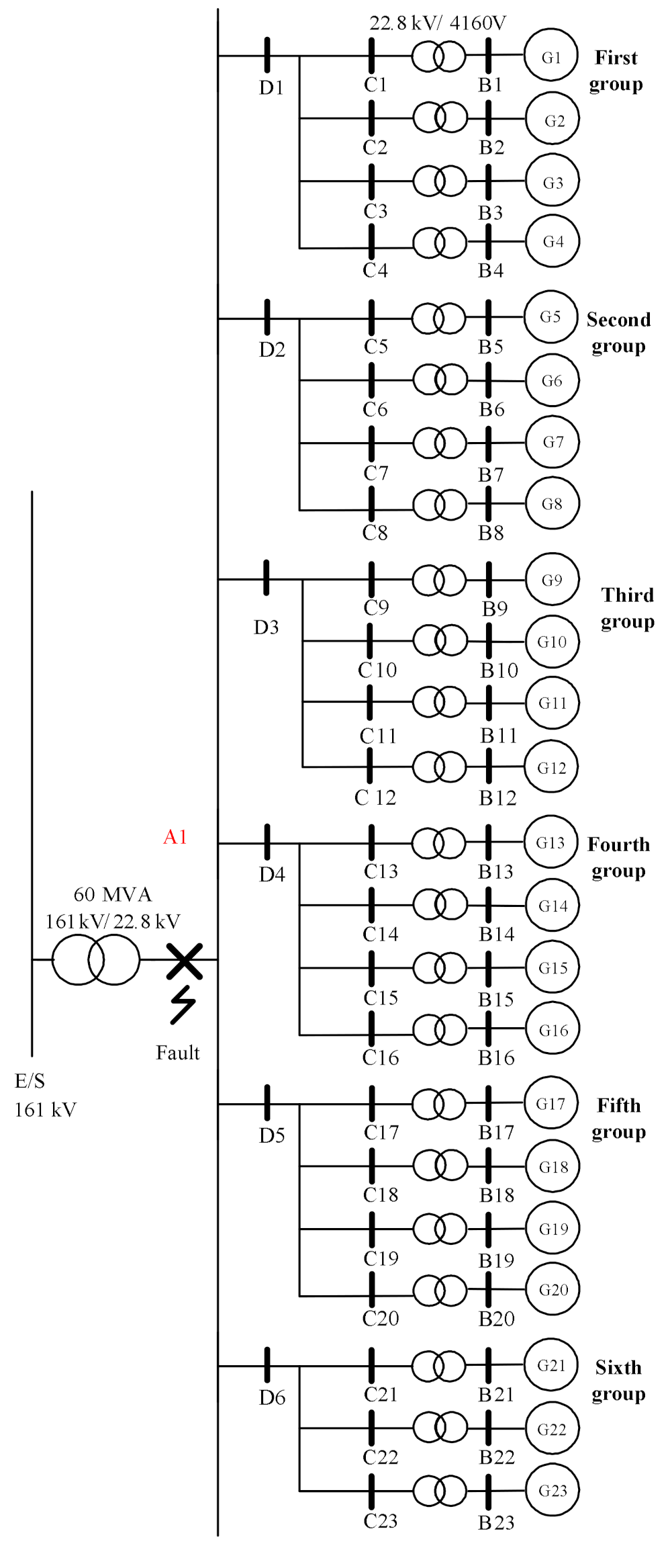
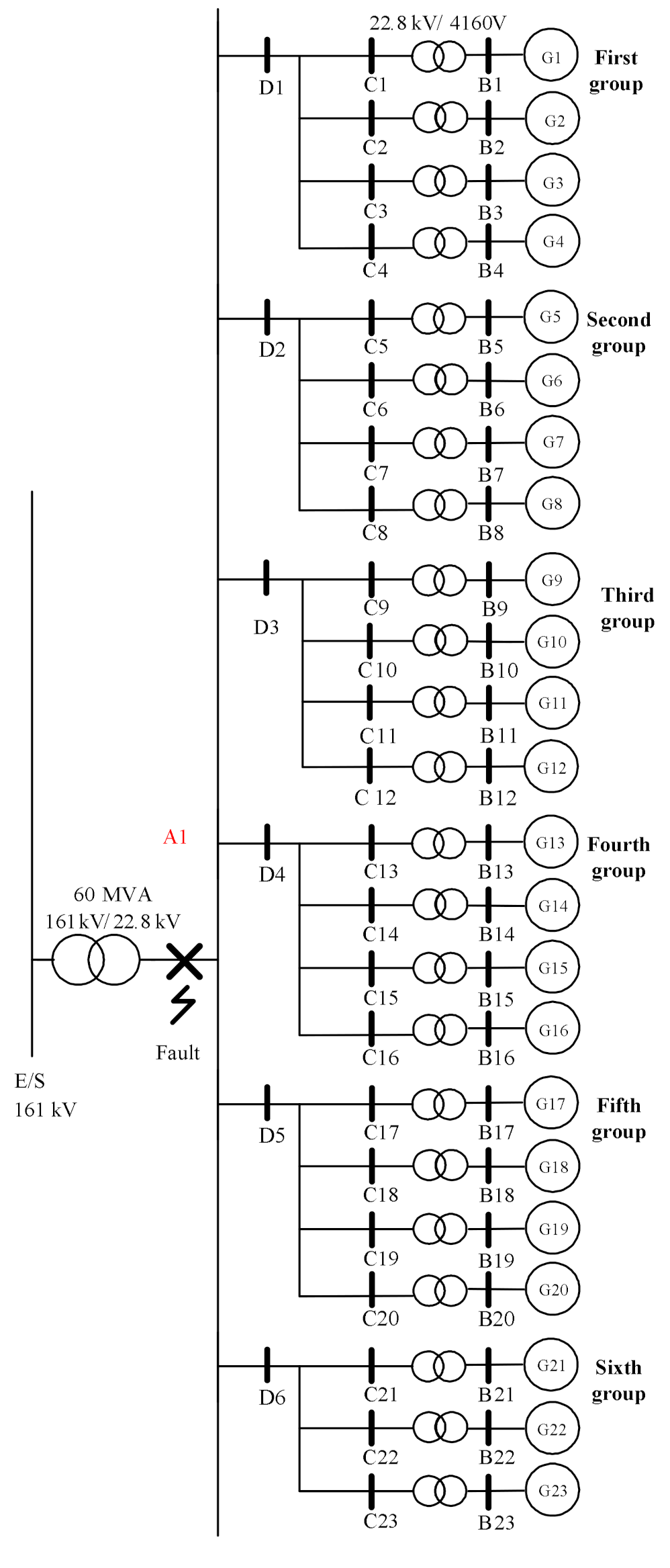
3. Case Study on Wind Power System
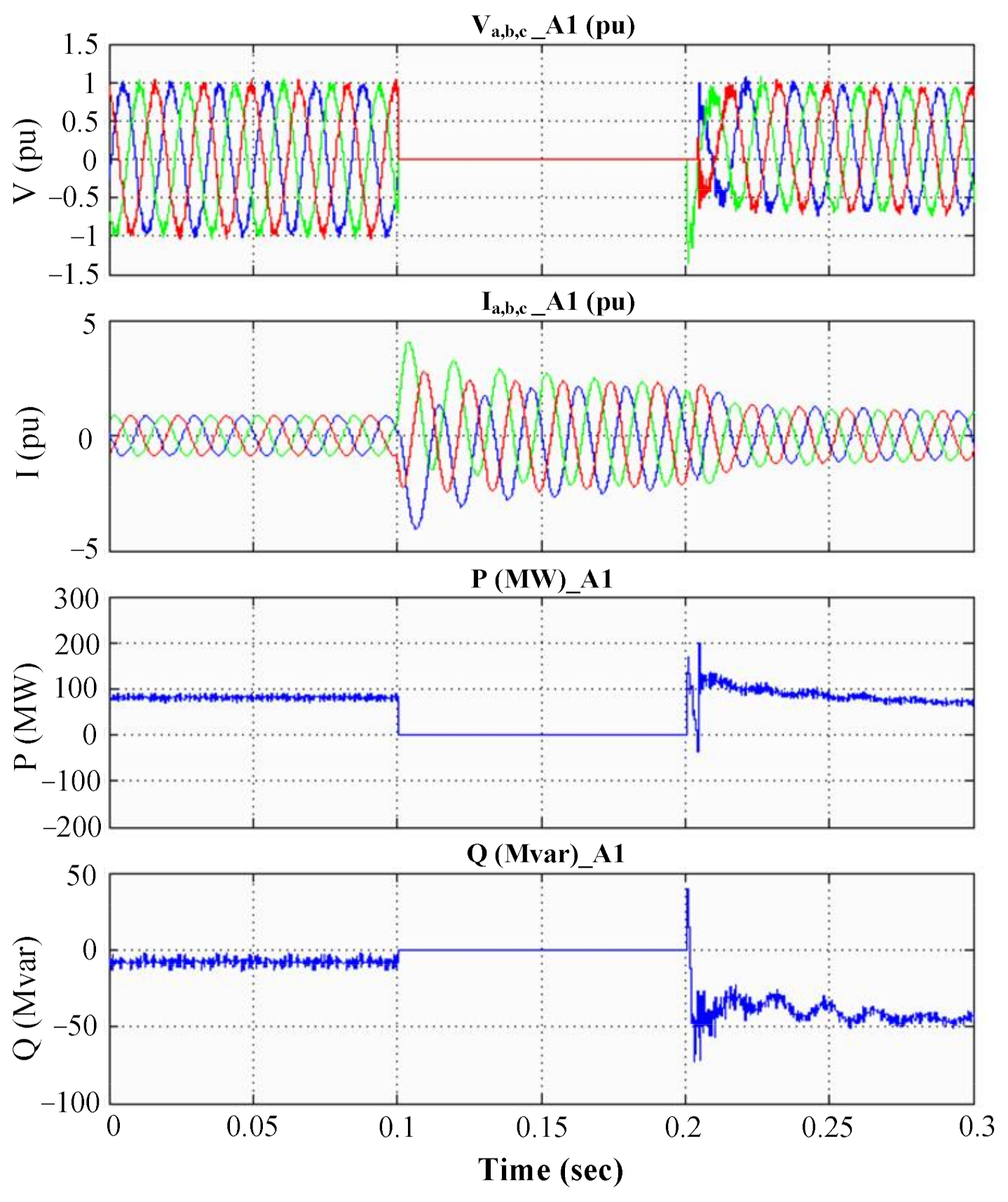
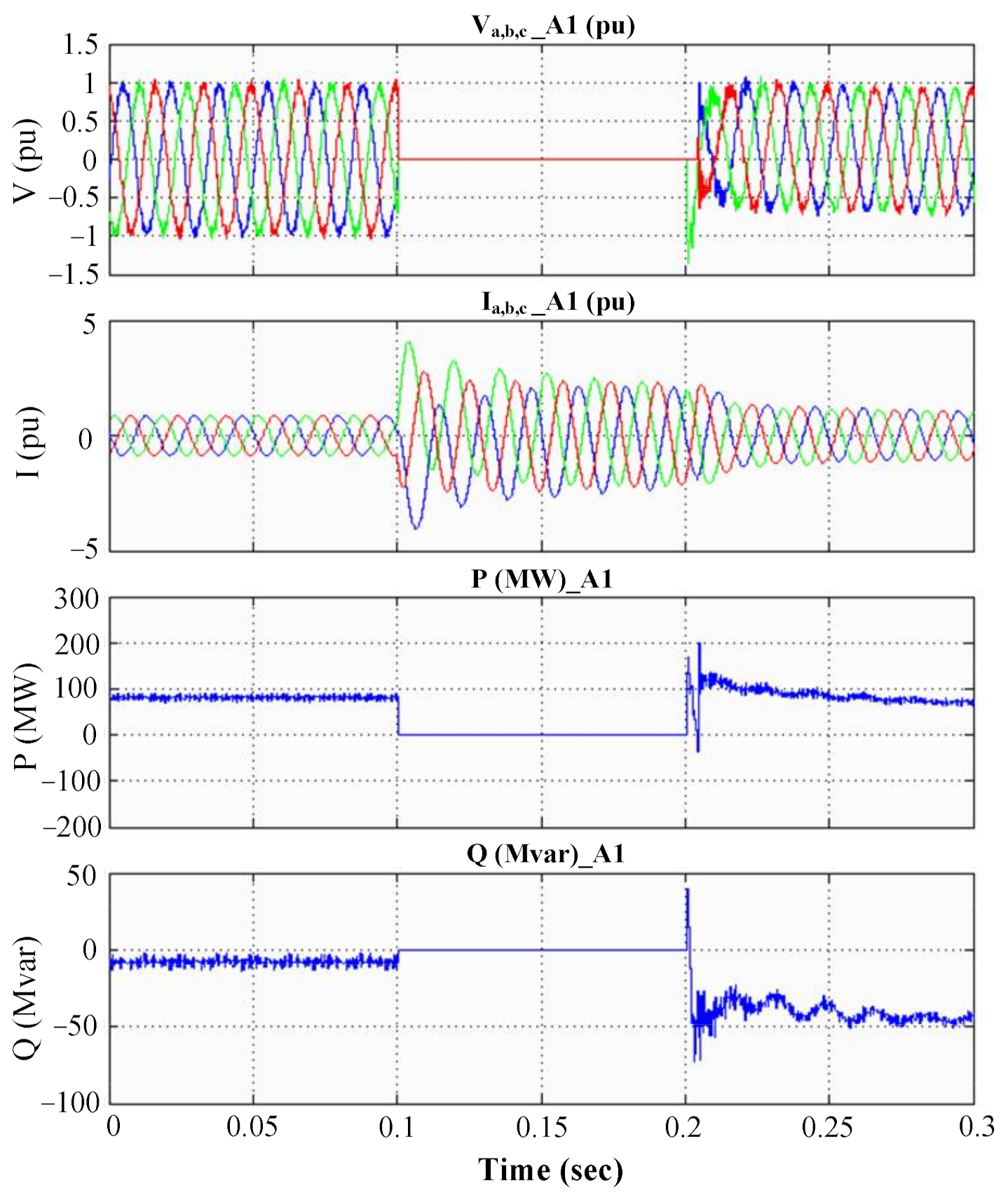
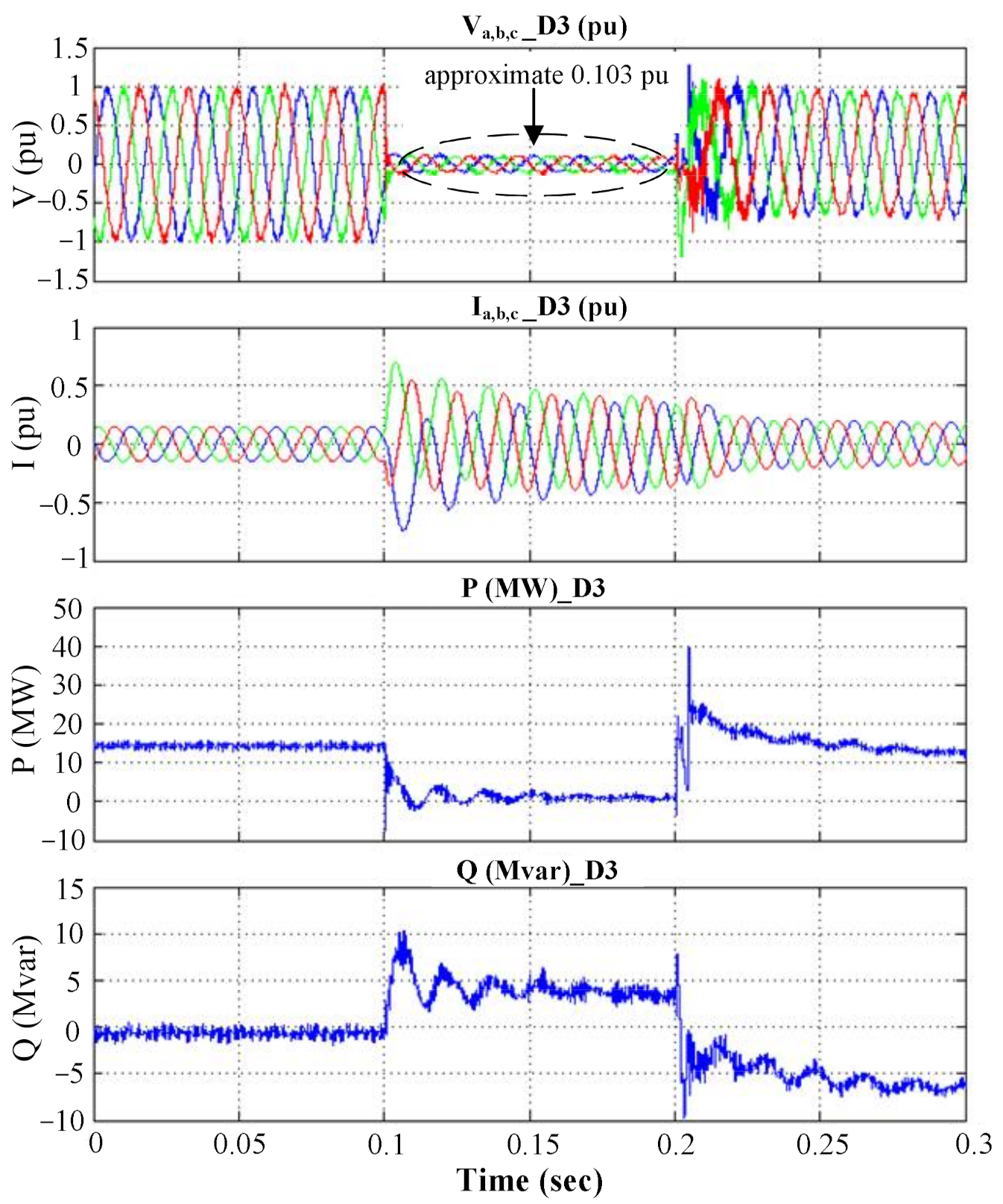
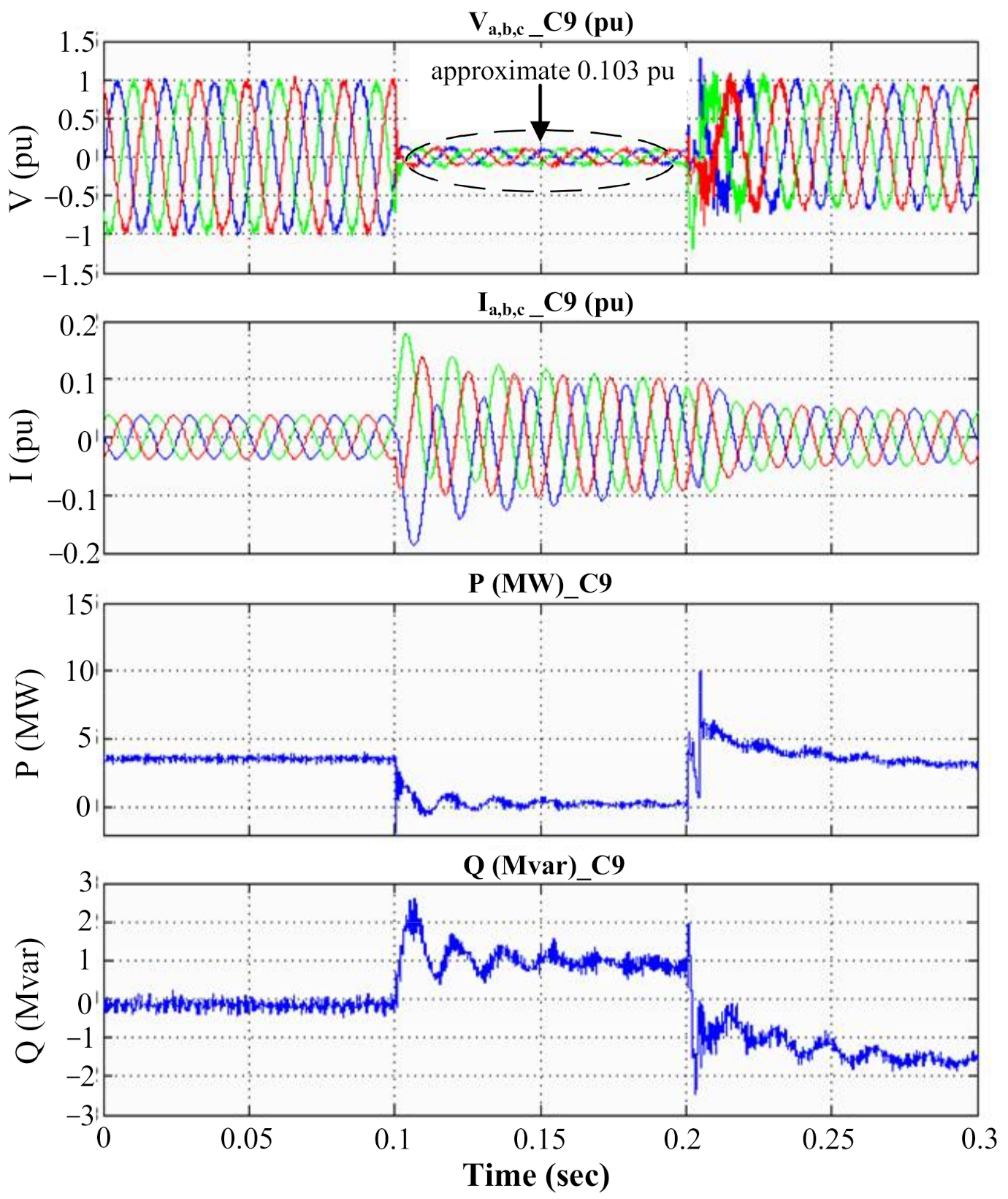
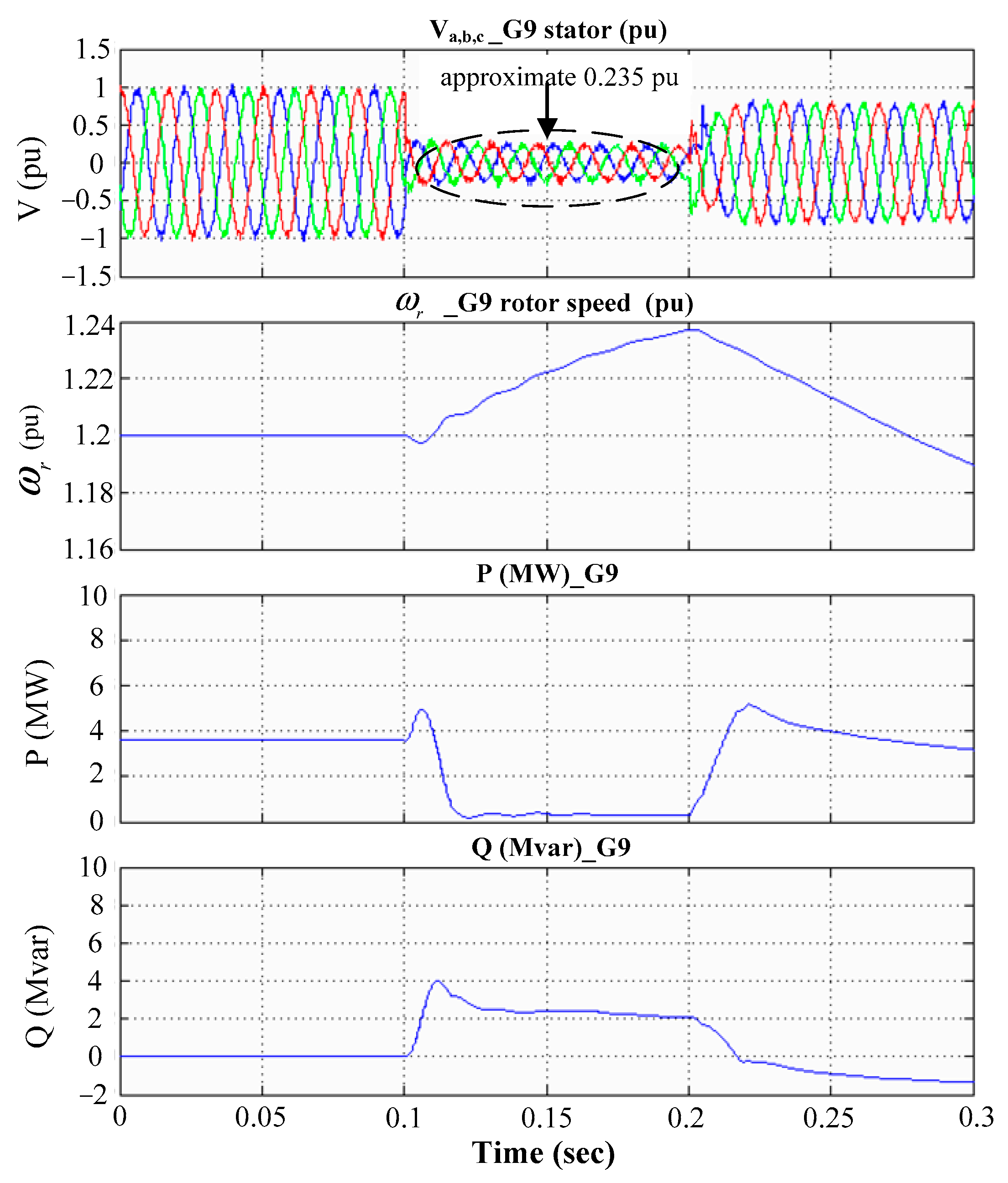
3.1. Three Phase Ground Fault Analysis
3.2. Responses in the Presence of a STATCOM
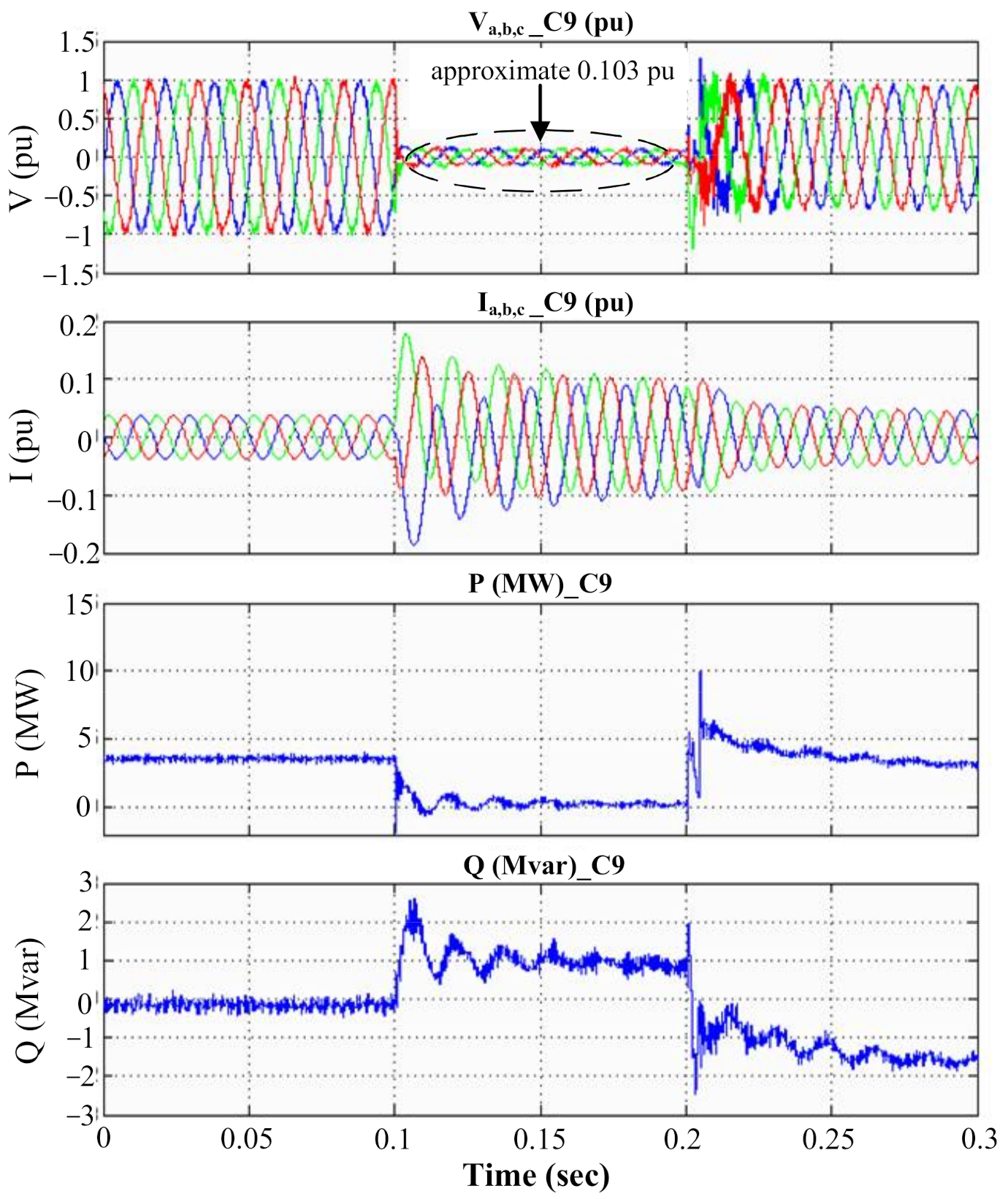
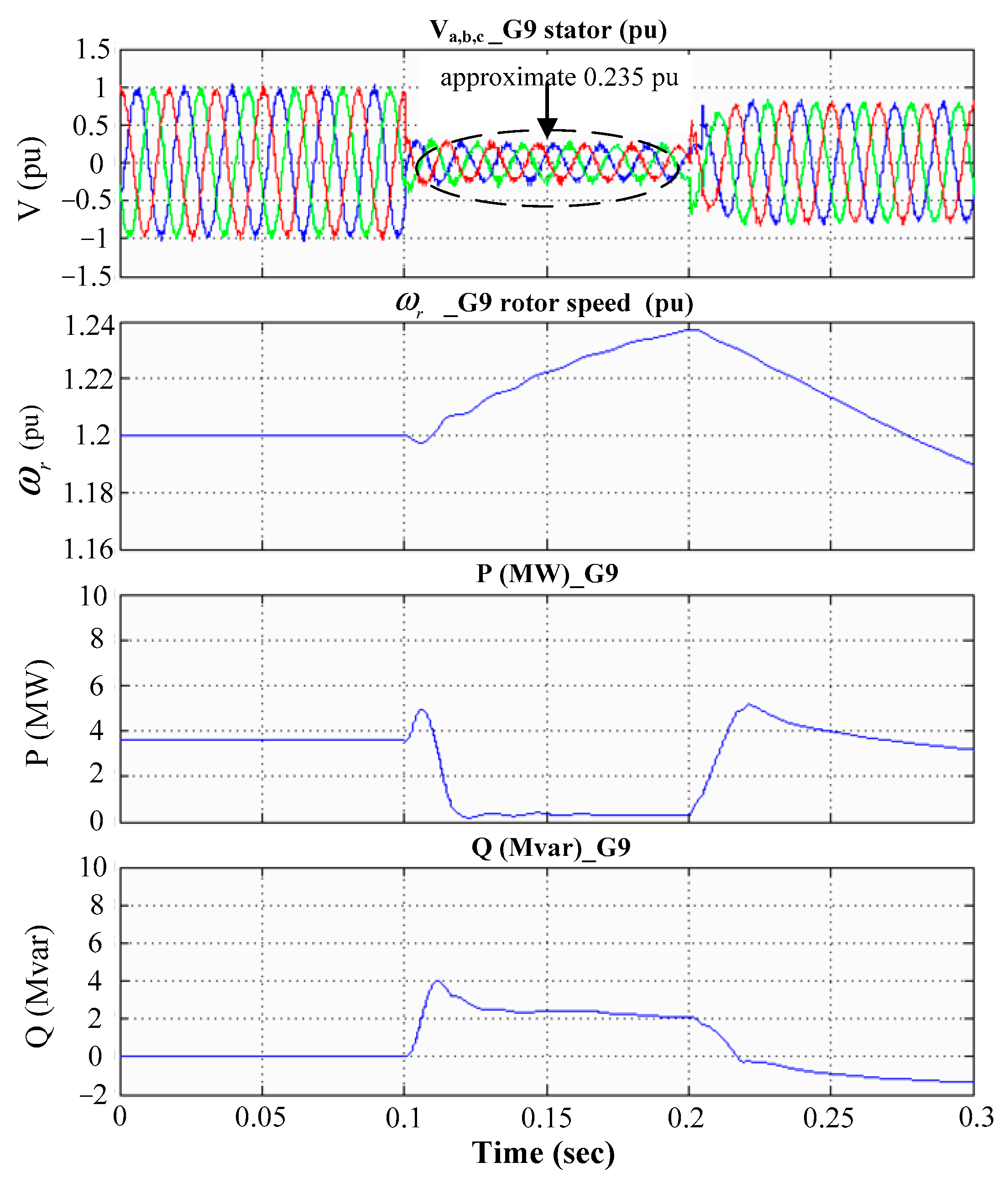
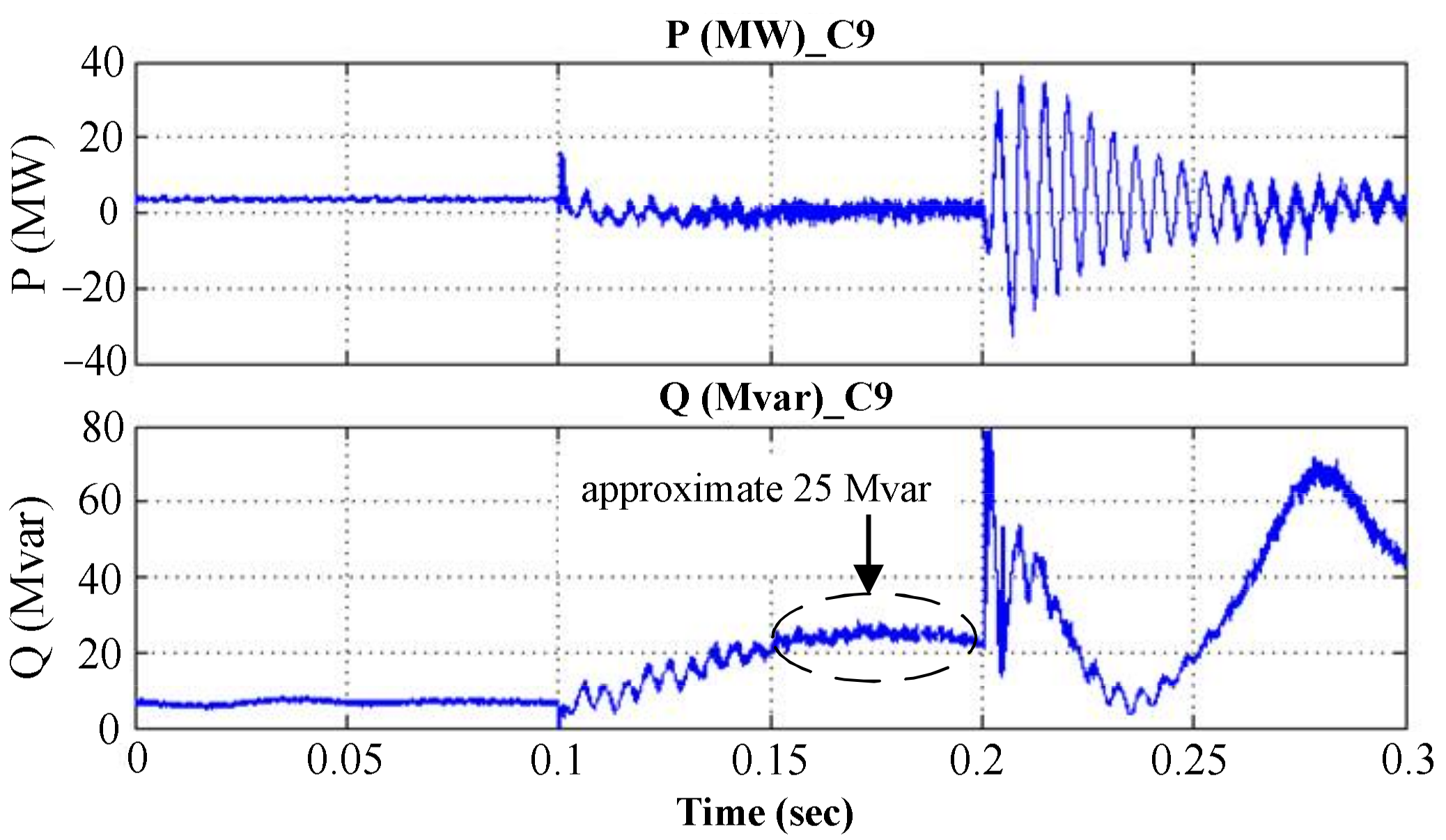
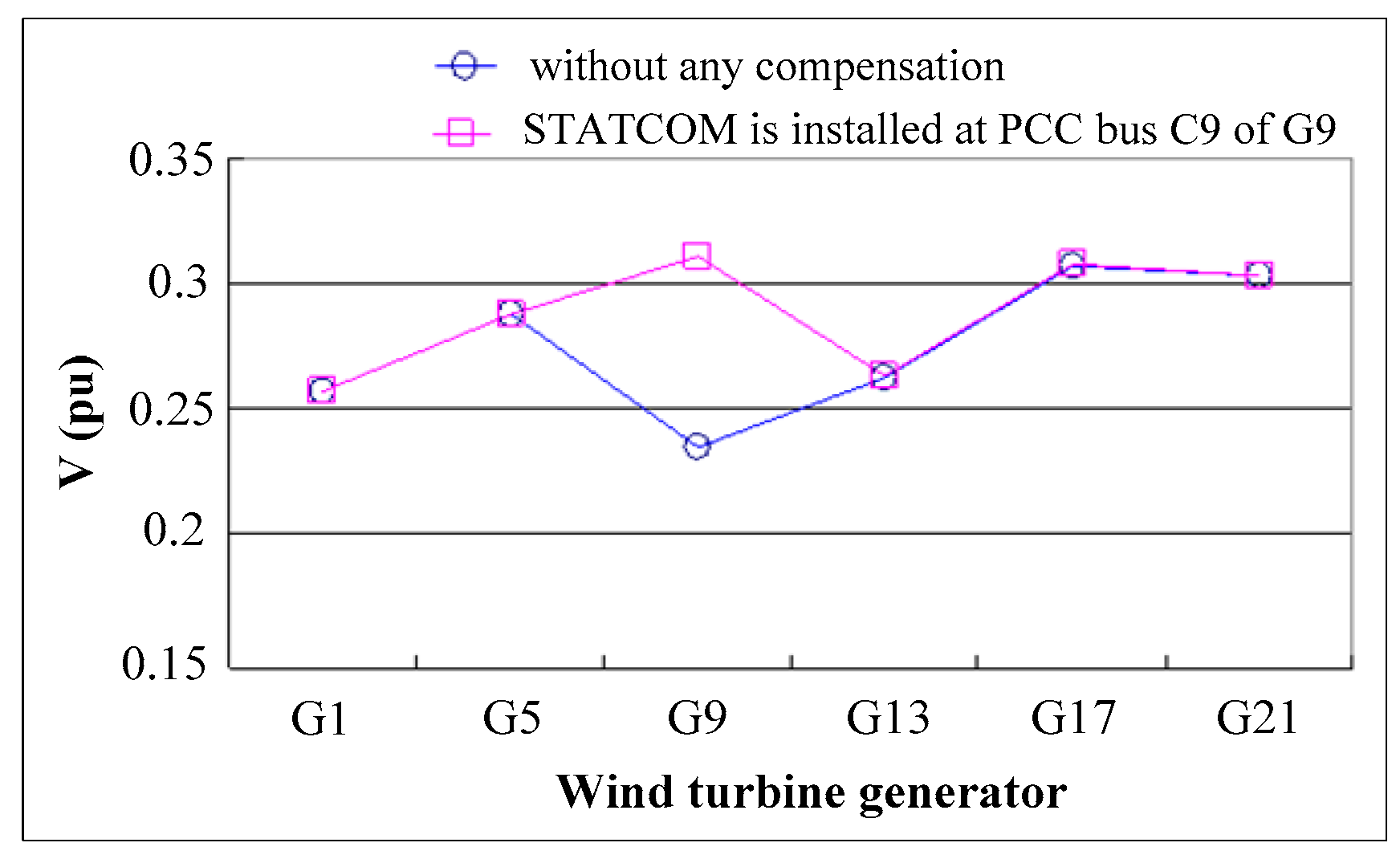
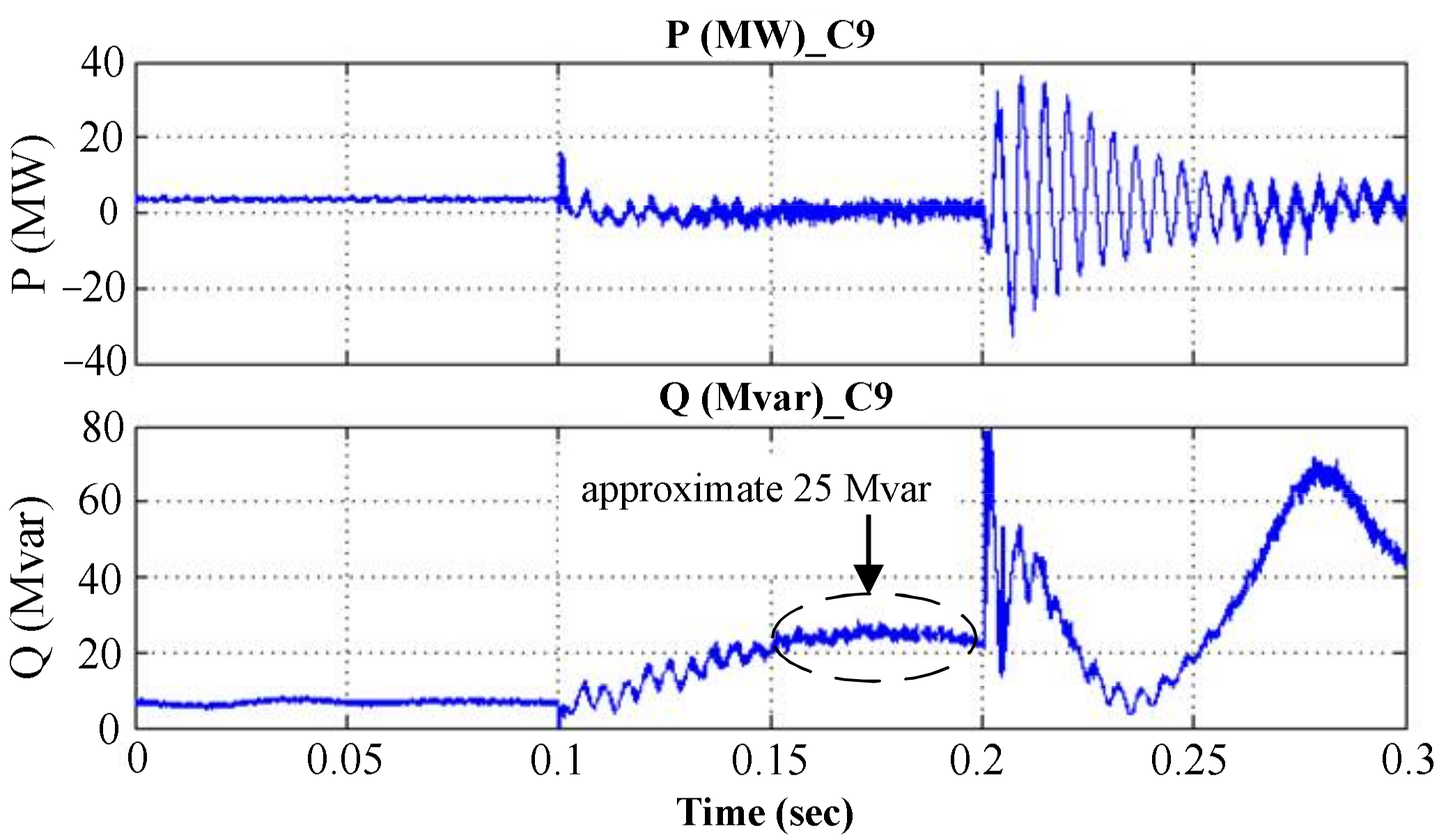
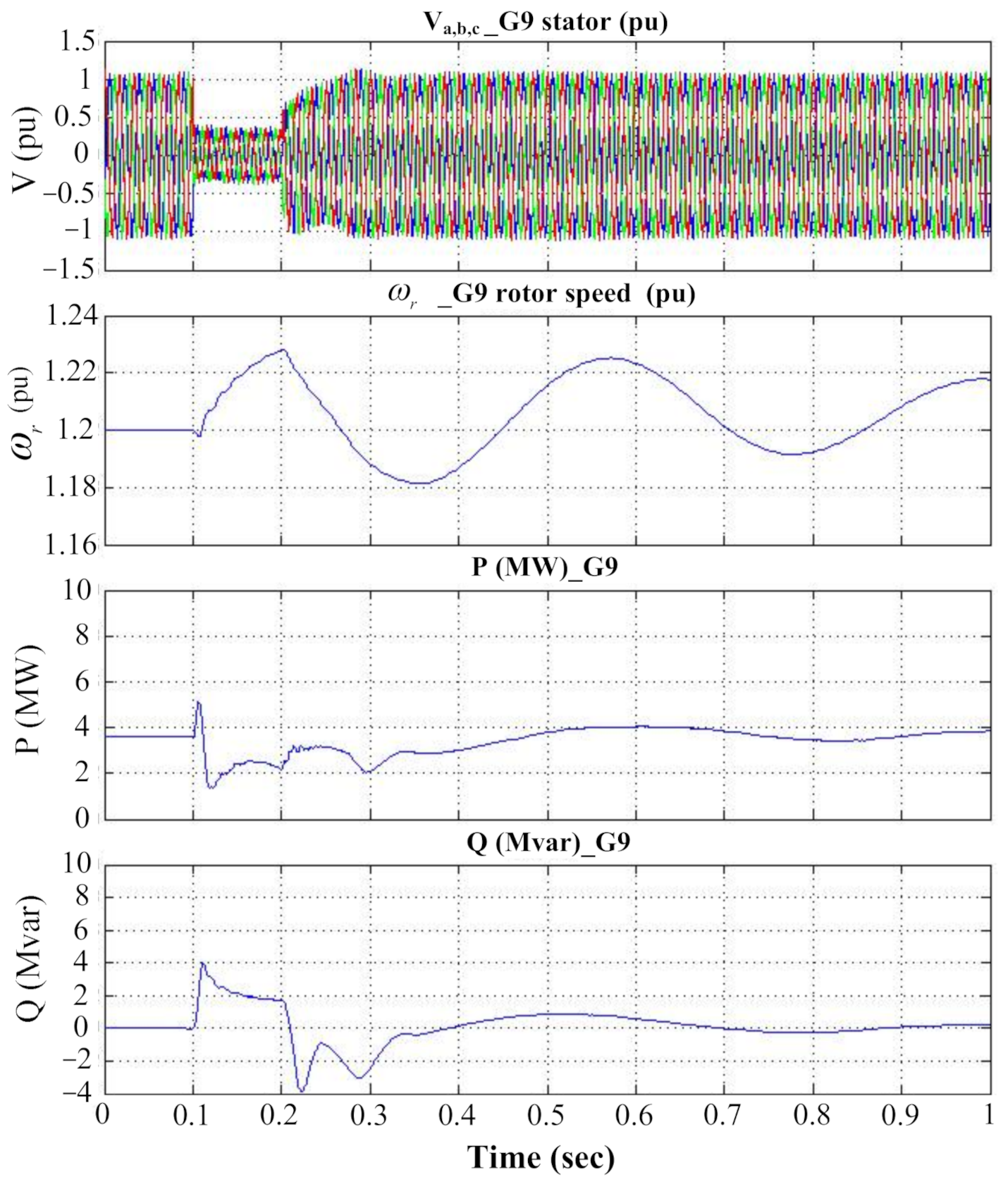
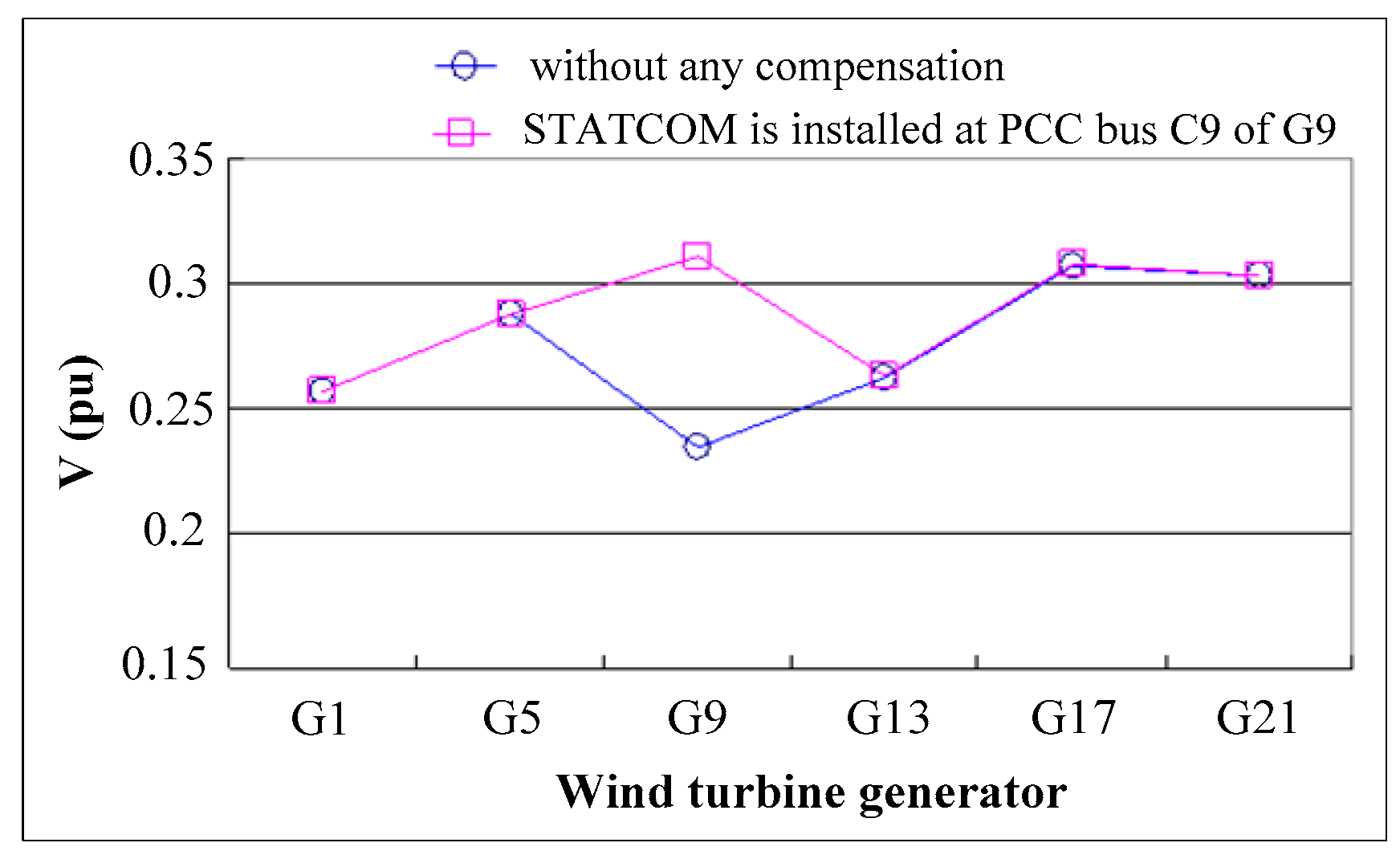
3.2.1. Case 1—STATCOM Installed at the PCC Bus C9 of G9
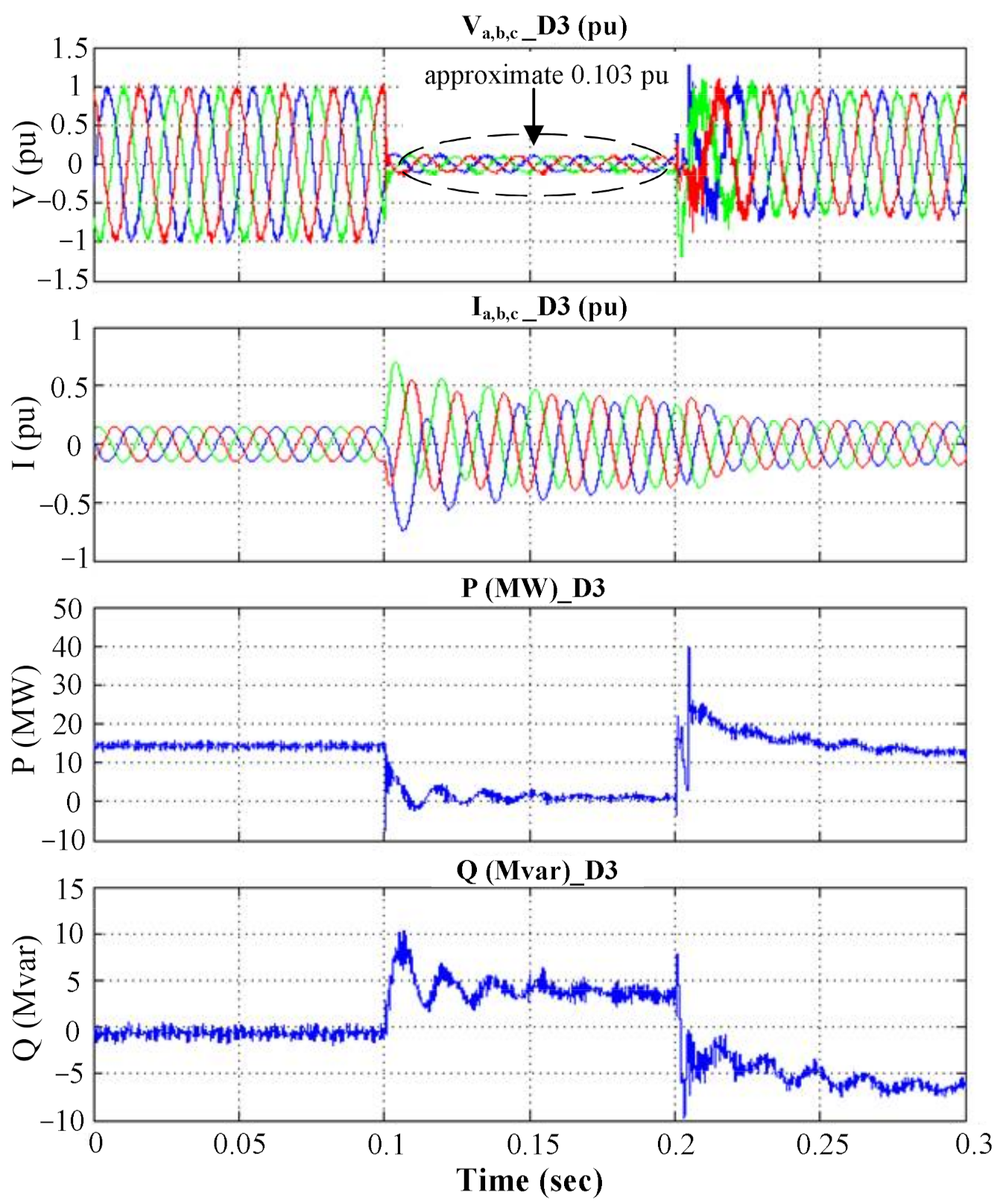
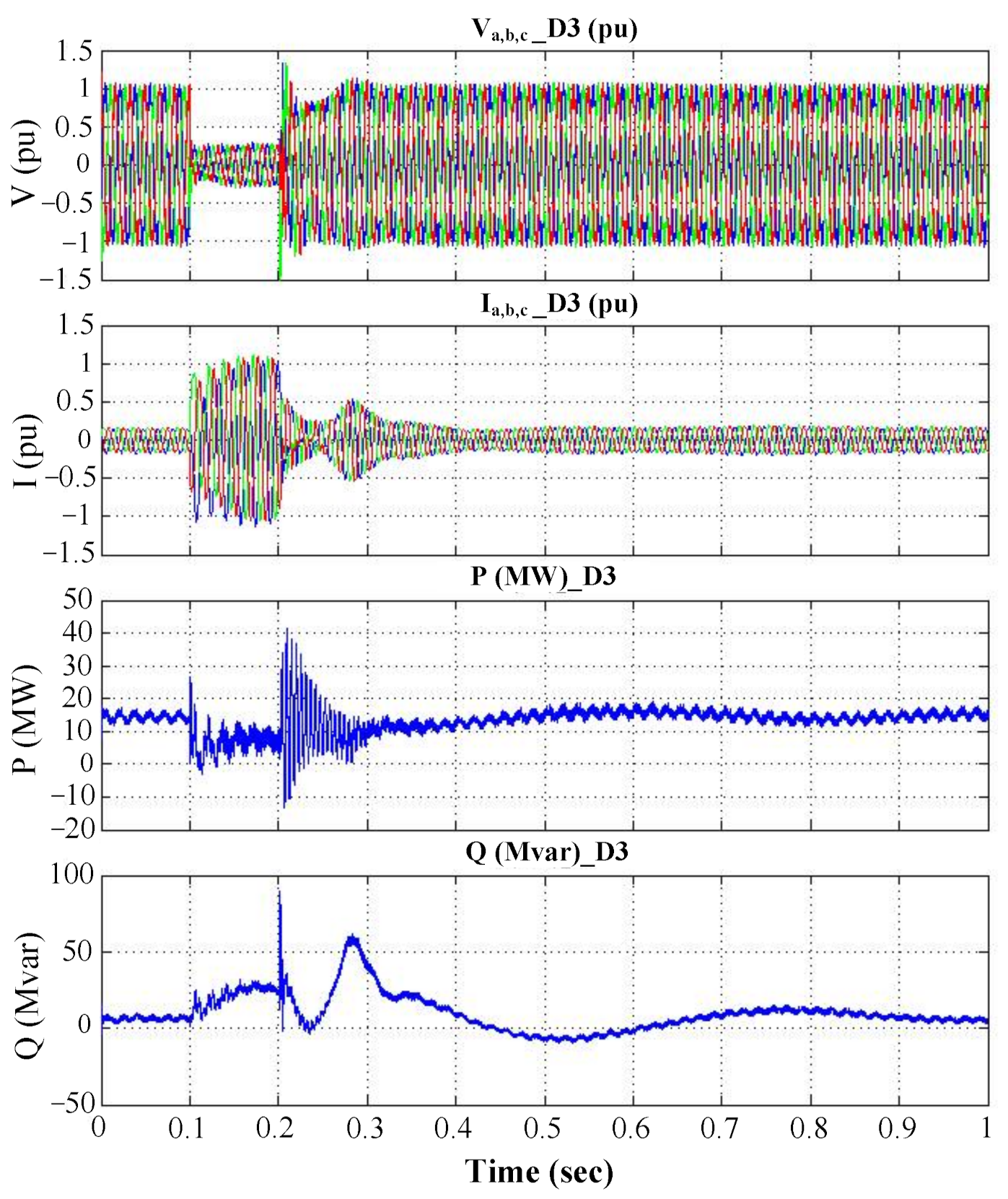
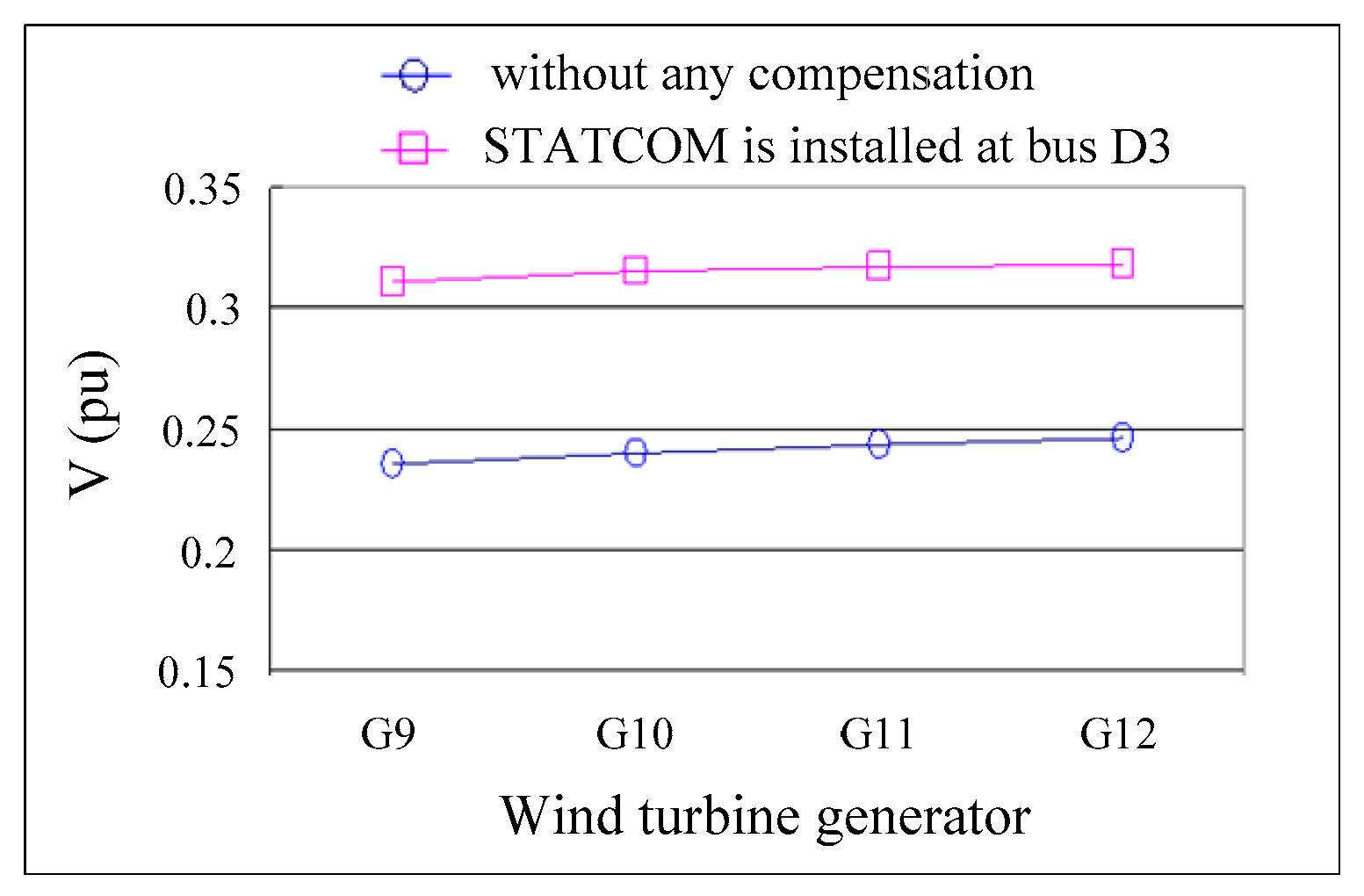
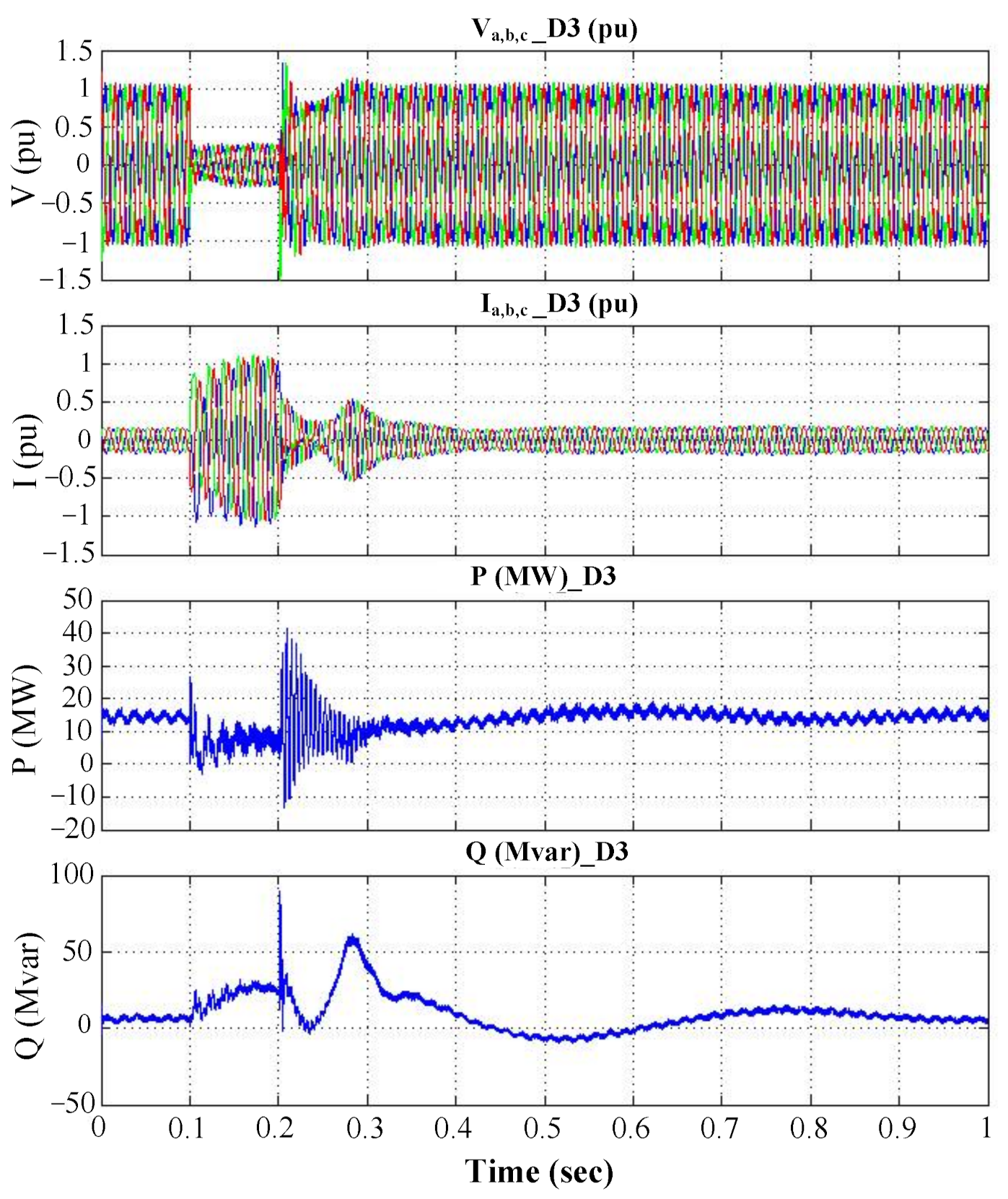
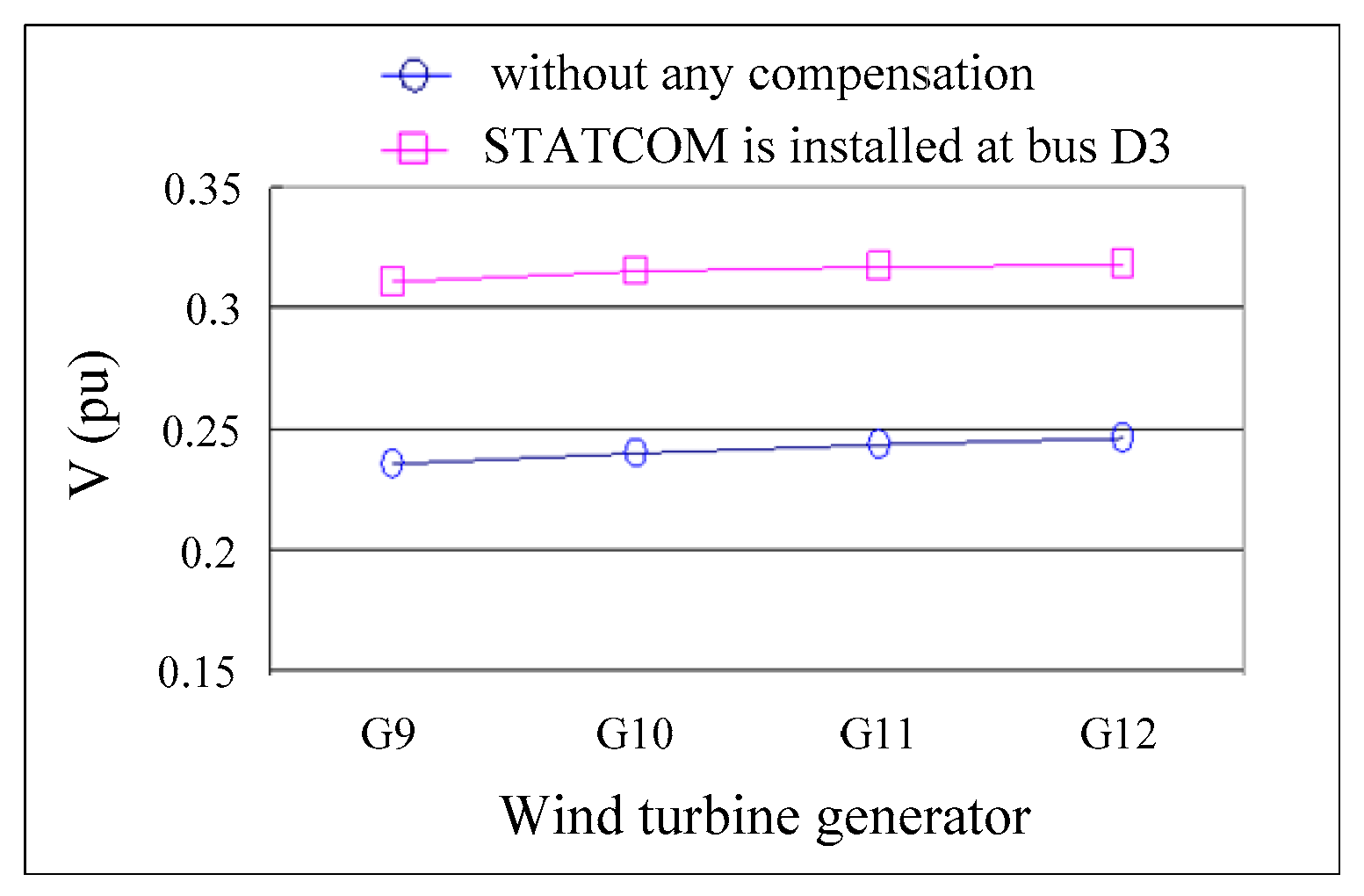
3.2.2. Case 2—STATCOM Installed at Feeder Termination Bus D3 of Third Group
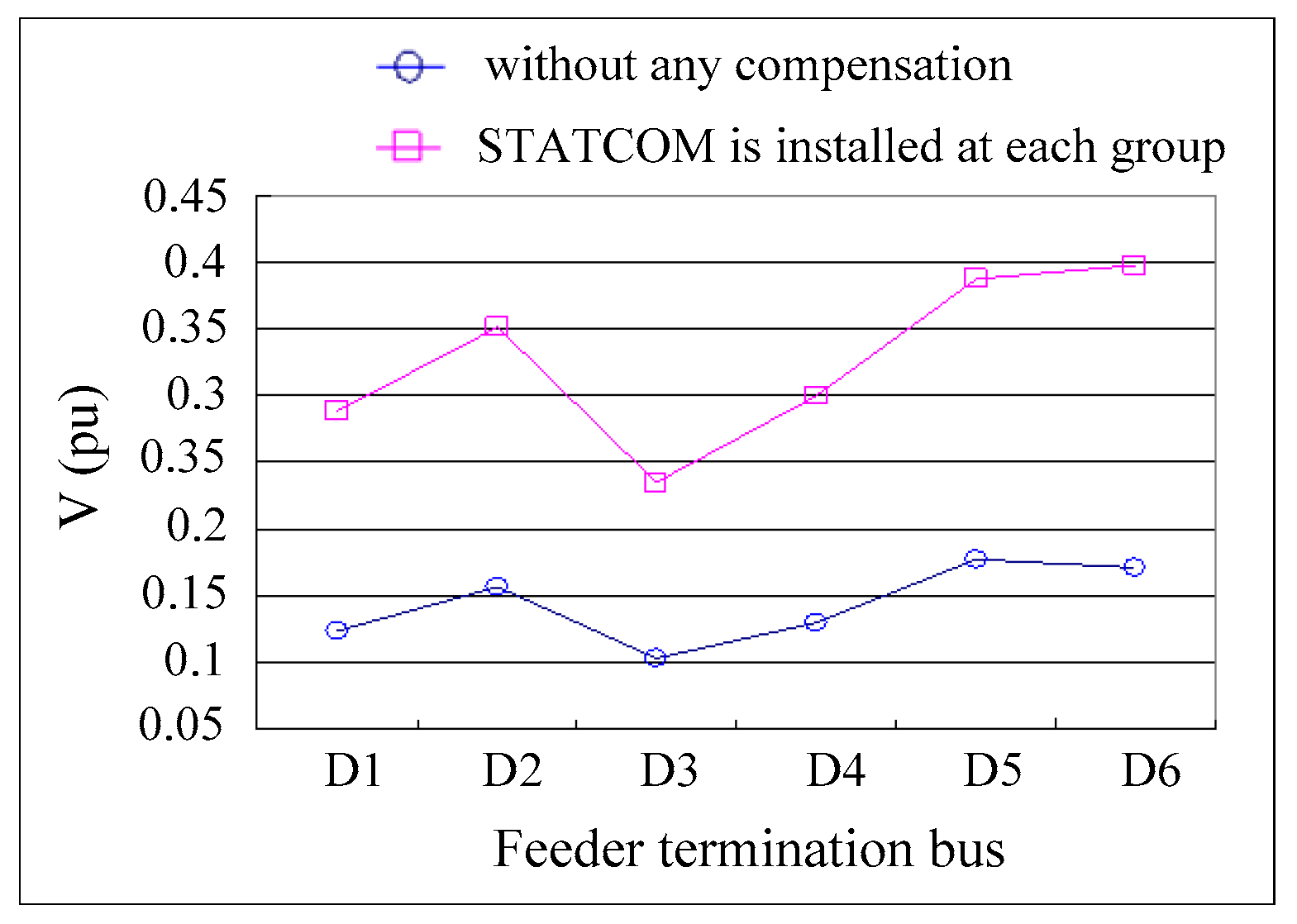
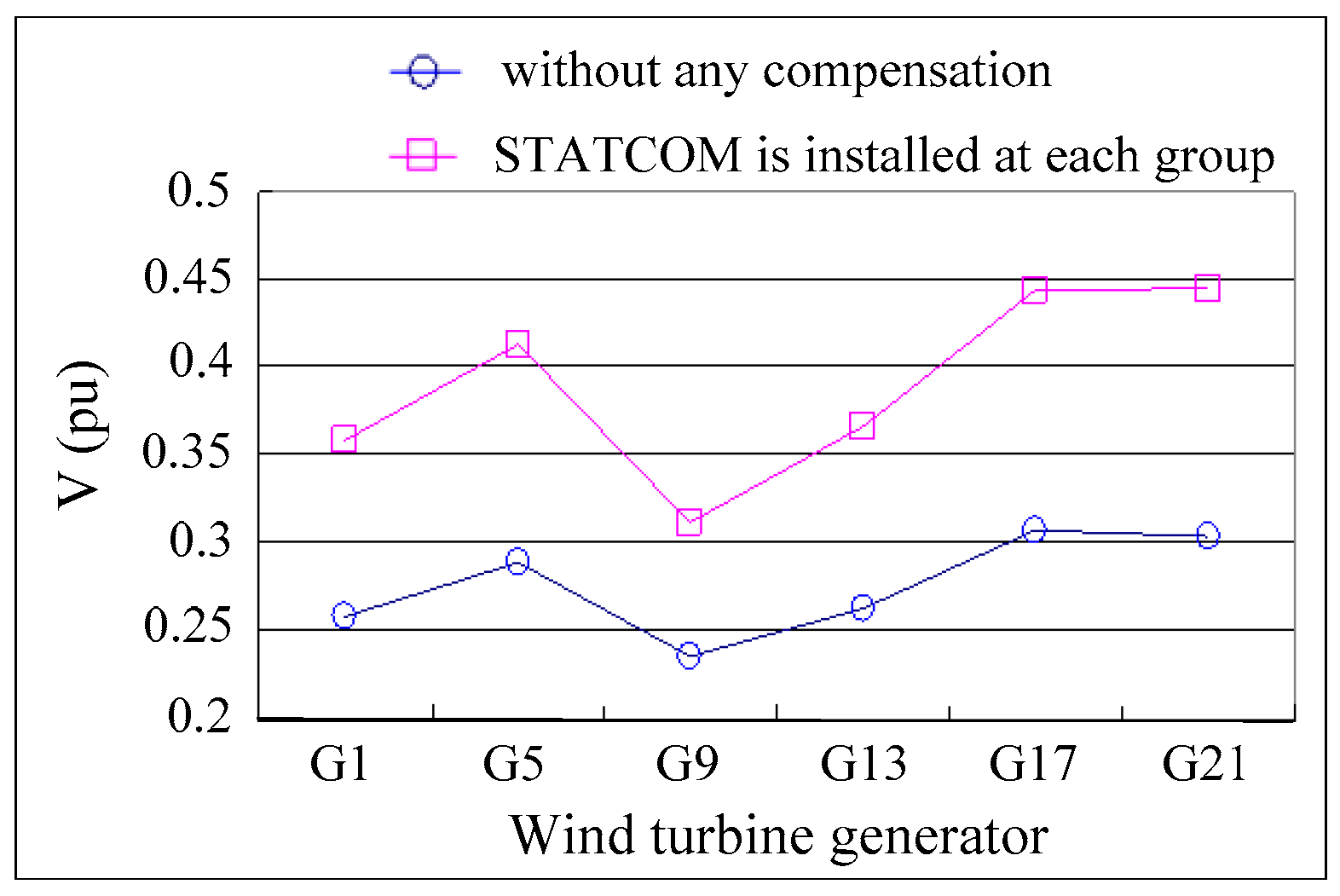
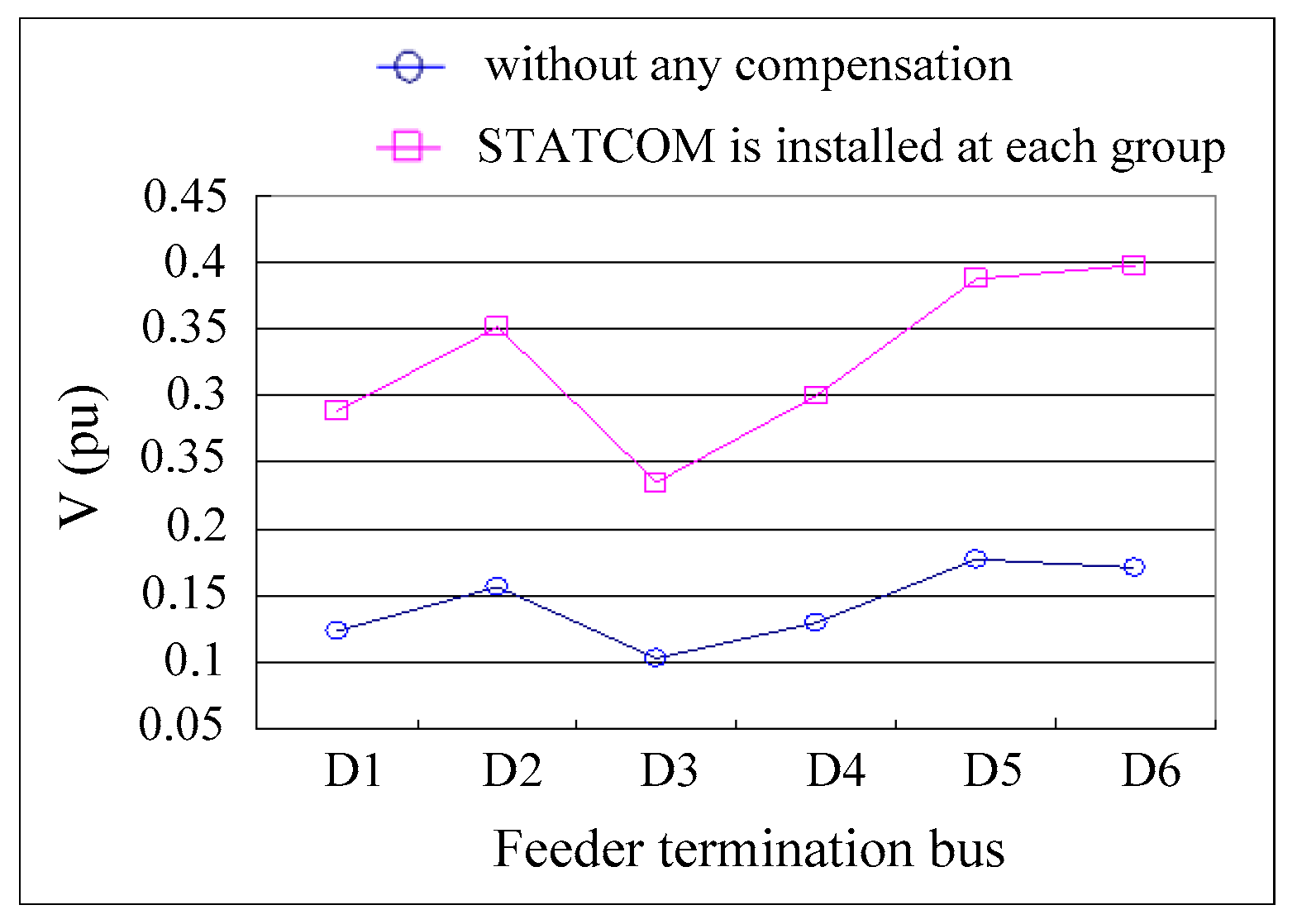
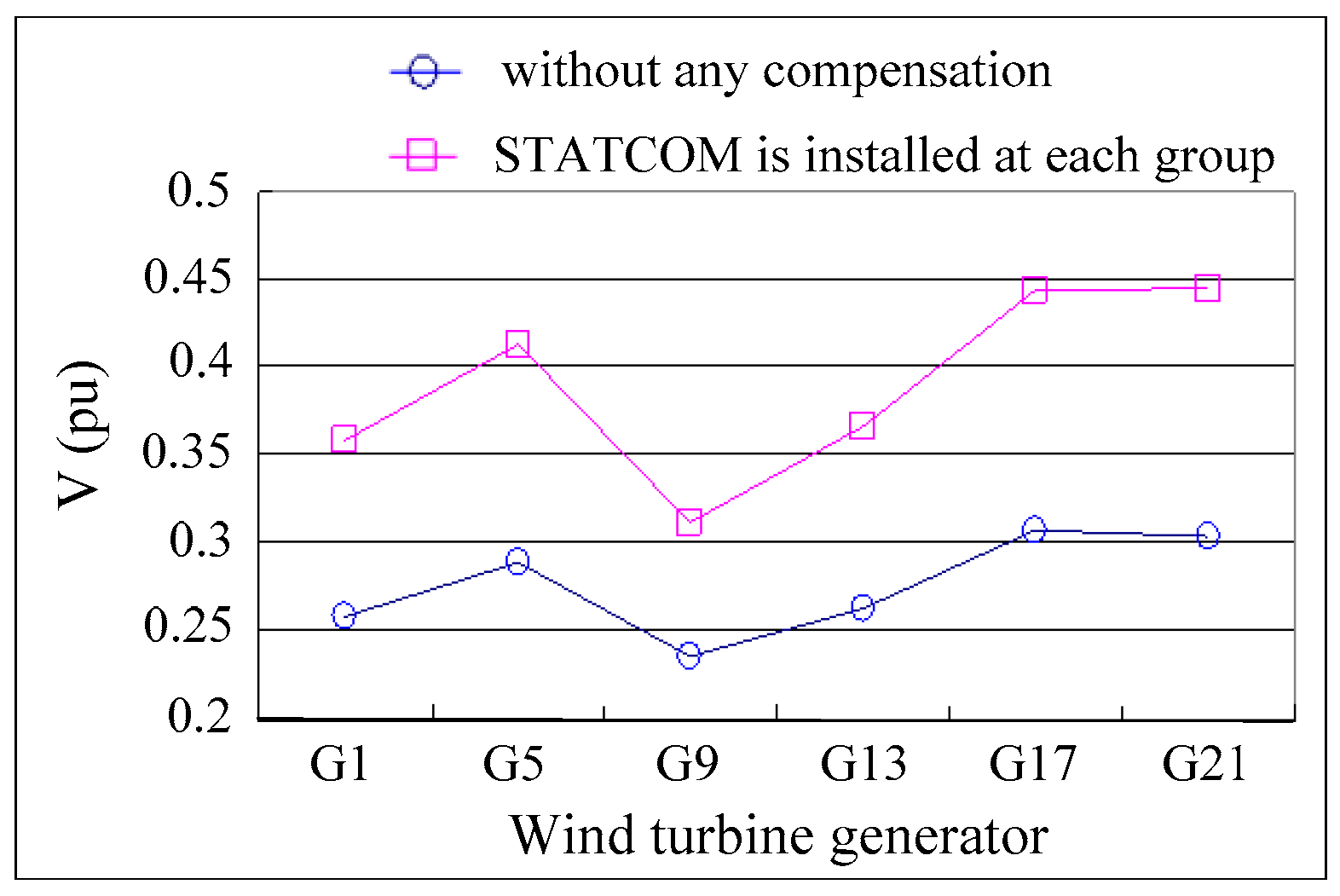
3.2.3. Case 3—STATCOM Installed at the Feeder Termination Bus D1–D6 of Each Group
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guo, S.; Miao, S.; Zhao, H.; Yin, H.; Wang, Z. A novel fault location method of a 35-kV high-reliability distribution network using wavelet filter-S transform. Energies 2020, 13, 5118. [Google Scholar] [CrossRef]
- Martini, F.; Contreras Montoya, L.T.; Ilinca, A. Review of wind turbine icing modelling approaches. Energies 2021, 14, 5207. [Google Scholar] [CrossRef]
- Song, X.W.; Liu, D.; Polinder, H.; Mijatovic, N.; Holboll, J.; Jensen, B.B. Short circuits of a 10-MW high-temperature superconducting wind turbine generator. IEEE Trans. Appl. Supercond. 2017, 27, 5201505. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.S.; Cheng, L.L. Open-switch fault-diagnostic method for back-to-back converters of a doubly fed wind power generation system. IEEE Trans. Power Electr. 2018, 33, 3452–3461. [Google Scholar] [CrossRef]
- Wang, L.; Truong, D.N. Stability enhancement of a power system with a PMSG-based and a DFIG-based offshore wind farm using a SVC with an adaptive-network-based fuzzy inference system. IEEE Trans. Ind. Electron. 2013, 60, 2799–2807. [Google Scholar] [CrossRef]
- Bian, X.Y.; Geng, Y.; Lo, K.L.; Fu, Y.; Zhou, Q.B. Coordination of PSSs and SVC damping controller to improve probabilistic small-signal stability of power system with wind farm integration. IEEE Trans. Power Syst. 2016, 31, 2371–2382. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Song, G.B.; Hussain, K.S.T. Three-phase adaptive auto-reclosing for single outgoing line of wind farm based on active detection from STATCOM. IEEE Trans. Power Deliv. 2020, 35, 1918–1927. [Google Scholar] [CrossRef]
- Ibrahim, A.M.; Gawish, S.A.; El-Amary, N.H.; Sharaf, S.M. STATCOM controller design and experimental investigation for wind generation system. IEEE Access 2019, 7, 150453–150461. [Google Scholar] [CrossRef]
- Liu, J.W.; Xu, Y.; Qiu, J.; Dong, Z.Y.; Wong, K.P. Non-network solution coordinated voltage stability enhancement with STATCOM and UVLS for wind-penetrated power system. IEEE Trans. Sustain. Energy 2020, 11, 1559–1568. [Google Scholar] [CrossRef]
- Luo, C.; Ma, X.; Yang, L.; Li, Y.; Yang, X.; Ren, J.; Zhang, Y. A modified grid-connected inverter topology for power oscillation suppression under unbalanced grid voltage faults. Energies 2021, 14, 5057. [Google Scholar] [CrossRef]
- Chishti, F.; Murshid, S.; Singh, B. Robust normalized mixed-norm adaptive control scheme for PQ improvement at PCC of a remotely located wind-solar PV-BES microgrid. IEEE Trans. Ind. Inform. 2020, 16, 1708–1721. [Google Scholar] [CrossRef]
- Ockhuis, D.K.; Kamper, M. Potential of slip synchronous wind turbine systems: Grid support and mechanical load mitigation. Energies 2021, 14, 4995. [Google Scholar] [CrossRef]
- Jin, Y.Q.; Wu, D.M.; Ju, P.; Rehtanz, C.; Wu, F.; Pan, X.P. Modeling of wind speeds inside a wind farm with application to wind farm aggregate modeling considering LVRT characteristic. IEEE Trans. Energy Convers. 2020, 35, 508–519. [Google Scholar] [CrossRef]
- Xiang, D.W.; Turu, J.C.; Muratel, S.M.; Wang, T. On-site LVRT testing method for full-power converter wind turbines. IEEE Trans. Sustain. Energy 2017, 8, 395–403. [Google Scholar] [CrossRef]
- Zhu, R.W.; Chen, Z.; Wu, X.J.; Deng, F.J. Virtual damping flux-based LVRT control for DFIG-based wind turbine. IEEE Trans. Energy Convers. 2015, 30, 714–725. [Google Scholar] [CrossRef]
- Su, Y.C.; Cheng, P.T. Development of a hybrid cascaded converter based STATCOM with reduced switching losses and improved fault ride through capability. IEEE Trans. Ind. Appl. 2021, 57, 3087–3096. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Lee, D.C. Advanced fault ride-through technique for PMSG wind turbine systems using line-side converter as STATCOM. IEEE Trans. Ind. Electron. 2013, 60, 2842–2850. [Google Scholar] [CrossRef]
- Morshed, M.J.; Fekih, A. A novel fault ride through scheme for hybrid wind/PV power generation systems. IEEE Trans. Sustain. Energy 2020, 11, 2427–2436. [Google Scholar] [CrossRef]
- Yan, S.; Wang, M.H.; Chen, J.; Hui, S.Y. Smart loads for improving the fault-ride-through capability of fixed-speed wind generators in microgrids. IEEE Trans. Smart Grid 2019, 10, 661–669. [Google Scholar] [CrossRef]
- Ma, Y.J.; Sun, X.T.; Zhou, X.S. Research on D-STATCOM double closed-loop control method based on improved first-order linear active disturbance rejection technology. Energies 2020, 13, 3958. [Google Scholar] [CrossRef]
- Law, K.H. An effective voltage controller for quasi-z-source inverter-based STATCOM with constant DC-link voltage. IEEE Trans. Power Electr. 2018, 33, 8137–8150. [Google Scholar] [CrossRef]
- Shi, Y.J.; Liu, B.Y.; Shi, Y.J.; Duan, S.X. Individual phase current control based on optimal zero-sequence current separation for a star-connected cascade STATCOM under unbalanced conditions. IEEE Trans. Power Electr. 2016, 31, 2099–2110. [Google Scholar] [CrossRef]
- Ma, Y.J.; Yang, X.; Zhou, X.S.; Yang, L.Y.; Zhou, Y.L. Dual closed-loop linear active disturbance rejection control of grid-side converter of permanent magnet direct-drive wind turbine. Energies 2020, 13, 1090. [Google Scholar] [CrossRef] [Green Version]
- Nunes, M.V.A.; Lopes, J.A.P.; Zurn, H.H.; Bezerra, U.H.; Almeida, R.G. Influence of the variable-speed wind generators in transient stability margin of the conventional generators integrated in electrical grids. IEEE Trans. Energy Convers. 2004, 19, 692–701. [Google Scholar] [CrossRef] [Green Version]
- Qiao, W.; Venayagamoorthy, G.K.; Harley, R.G. Real-time implementation of a STATCOM on a wind farm equipped with doubly fed induction generators. IEEE Trans. Ind. Appl. 2009, 45, 98–107. [Google Scholar] [CrossRef] [Green Version]
- Onel, I.Y.; Benbouzid, M.E.H. Induction motor bearing failure detection and diagnosis: Park and Concordia transform approaches comparative study. IEEE Asme Trans. Mech. 2008, 13, 257–262. [Google Scholar] [CrossRef] [Green Version]
- Hannoon, N.M.S.; Ananth, D.V.N.; Bin Hidayat, M.N.; Chowdary, P.S.R.; Chakravarthy, V.V.S.S.S.; Sivashankar, K.; Satapathy, S.C. A common capacitor based three level STATCOM and design of DFIG converter for a zero-voltage fault ride-through capability. IEEE Access 2021, 9, 105153–105179. [Google Scholar] [CrossRef]
- Wang, D.S.; Tan, D.P.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Dezelak, K.; Bracinik, P.; Hoger, M.; Otcenasova, A. Comparison between the particle swarm optimisation and differential evolution approaches for the optimal proportional-integral controllers design during photovoltaic power plants modelling. IET Renew. Power Gen. 2016, 10, 522–530. [Google Scholar] [CrossRef]
- Zhou, S.J.; Rong, F.; Ning, X.J. Optimization control strategy for large doubly-fed induction generator wind farm based on grouped wind turbine. Energies 2021, 14, 4848. [Google Scholar] [CrossRef]
- Xi, Z.; Bhattacharya, S. STATCOM control with instantaneous phase-locked loop for performance improvement under single-line to ground fault. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 971–976. [Google Scholar]
- Parallel Technology of Taiwan Power Co., Ltd. Renewable Energy Power Generation System; Taiwan Power Co., Ltd.: Taipei City, Taiwan, 2018; pp. 1–7. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First Group | Length (km) | Fourth Group | Length (km) |
| E/S→G1 | 3.7 | E/S→G13 | 3.863 |
| G1→G2 | 0.212 | G13→G14 | 0.212 |
| G2→G3 | 0.212 | G14→G15 | 0.212 |
| G3→G4 | 0.212 | G15→G16 | 0.513 |
| Second Group | Length (km) | Fifth Group | Length (km) |
| E/S→G5 | 4.65 | E/S→G17 | 5.3 |
| G5→G6 | 0.212 | G17→G18 | 0.5 |
| G6→G7 | 0.212 | G18→G19 | 0.5 |
| G7→G8 | 0.212 | G19→G20 | 0.527 |
| Third Group | Length (km) | Sixth Group | Length (km) |
| E/S→G9 | 3.015 | E/S→G21 | 6.827 |
| G9→G10 | 0.212 | G21→G22 | 0.528 |
| G10→G11 | 0.212 | G22→G23 | 0.514 |
| G11→G12 | 0.212 |
| 4.16 kV/22.8 kV | 22.8 kV/161 kV | |
|---|---|---|
| Rated capacity | 4 MVA | 60 MVA |
| Transmission line impedance | 0.0694 (Ω/km) | 0.0694 (Ω/km) |
| Connection type | Yg/Δ | Δ/Yg |
| Wind Turbine | Generator | ||
|---|---|---|---|
| Rated power | 3.6 MW | Rated power | 3.6 MW |
| Rated velocity | 14 m/s | Rated voltage | 4.16 kV |
| Cut-in velocity | 3.5 m/s | Rated frequency | 60 Hz |
| Number of blades | 3 | rr | 0.025 pu |
| Cut-out velocity | 27 m/s | rs | 0.0079 pu |
| Area of cross section | 8495 m2 | Lir | 0.40 pu |
| Blade diameter | 104 m | Lis | 0.07939 pu |
| Blade speed | 8.5–15.3 rpm | Lm | 4.4 pu |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, F.-C.; Chen, H.-C. An Anti-Fluctuation Compensator Design and Its Control Strategy for Wind Farm System. Energies 2021, 14, 6413. https://doi.org/10.3390/en14196413
Gu F-C, Chen H-C. An Anti-Fluctuation Compensator Design and Its Control Strategy for Wind Farm System. Energies. 2021; 14(19):6413. https://doi.org/10.3390/en14196413
Chicago/Turabian StyleGu, Feng-Chang, and Hung-Cheng Chen. 2021. "An Anti-Fluctuation Compensator Design and Its Control Strategy for Wind Farm System" Energies 14, no. 19: 6413. https://doi.org/10.3390/en14196413
APA StyleGu, F.-C., & Chen, H.-C. (2021). An Anti-Fluctuation Compensator Design and Its Control Strategy for Wind Farm System. Energies, 14(19), 6413. https://doi.org/10.3390/en14196413