
Development of a Smart Energy Community by Coupling Neighbouring Community Microgrids for Enhanced Power Sharing Using Customised Droop Control




Abstract
:1. Introduction
- A well-defined control strategy where symmetric and asymmetric (if required) power-sharing can be achieved through a PM-based droop control in order to couple the neighbouring CMGs more efficiently. The proposed PM strategy defines the reference power setpoints for the conventional droop control.
- An enhanced frequency regulation method without using a secondary controller. The power flow between the CMGs is controlled keeping the frequency within an allowable range. As the considered system is static and standalone, the proposed PM-based droop control helps to maintain the system frequency in an acceptable range.
- A validated test of proposed controller by developing laboratory scale CMGs.
2. System Configuration and Proposed Droop Control for Power Sharing
3. CMG Inverter Control Strategy with PM Based Droop Control
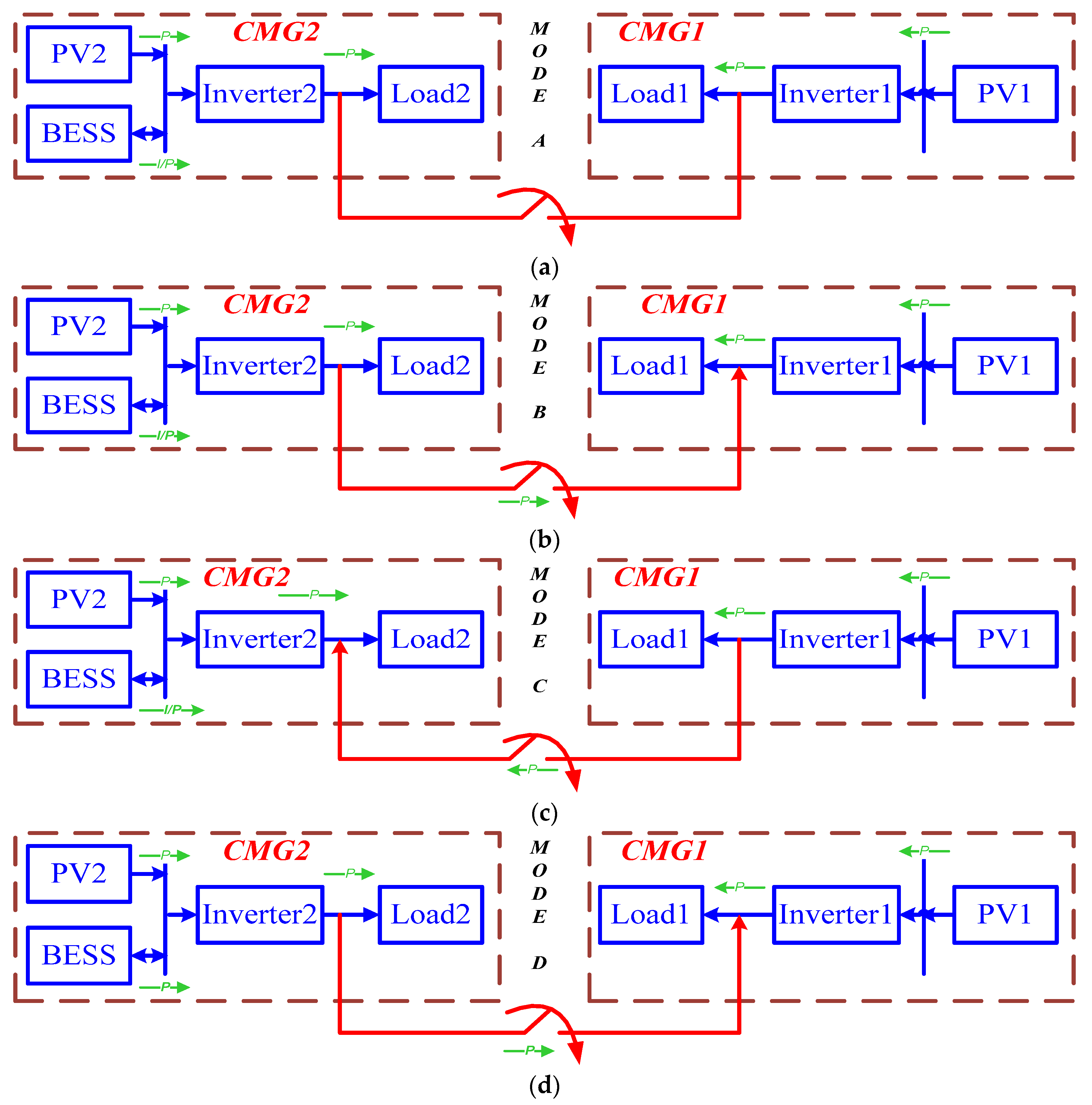
3.1. Independent CMG Operation
3.2. CMG1 Is Overloaded in Inter-Connected Mode
3.3. CMG2 Is Overloaded in Inter-Connected Mode
3.4. Both CMGs Are Overloaded in Inter-Connected Mode
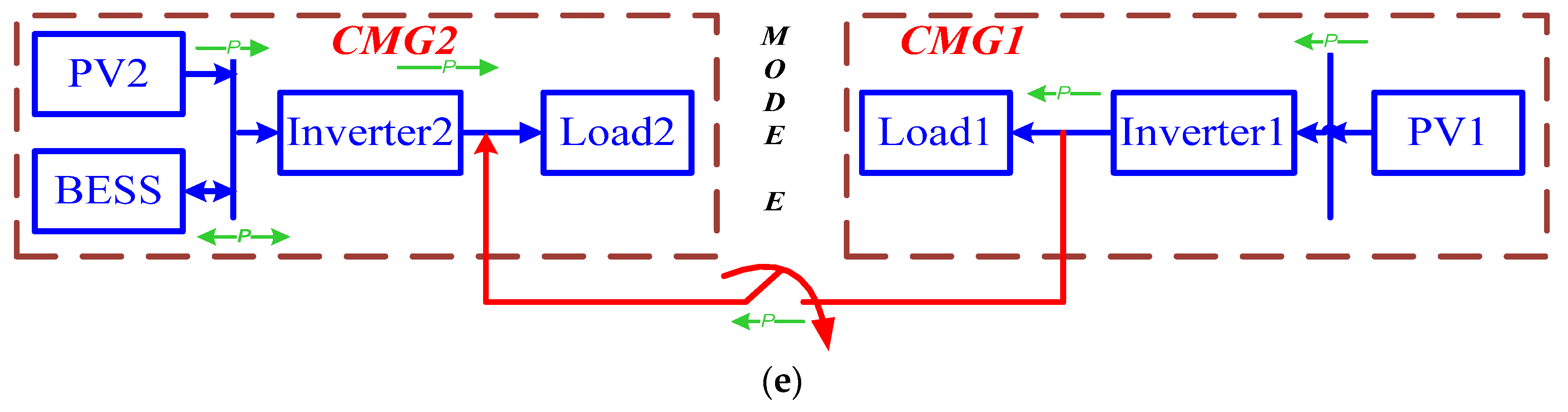
3.5. Both the CMGs Are Underloaded in Inter-Connected Mode
4. Simulated Results with Discussion
4.1. Normal Operation
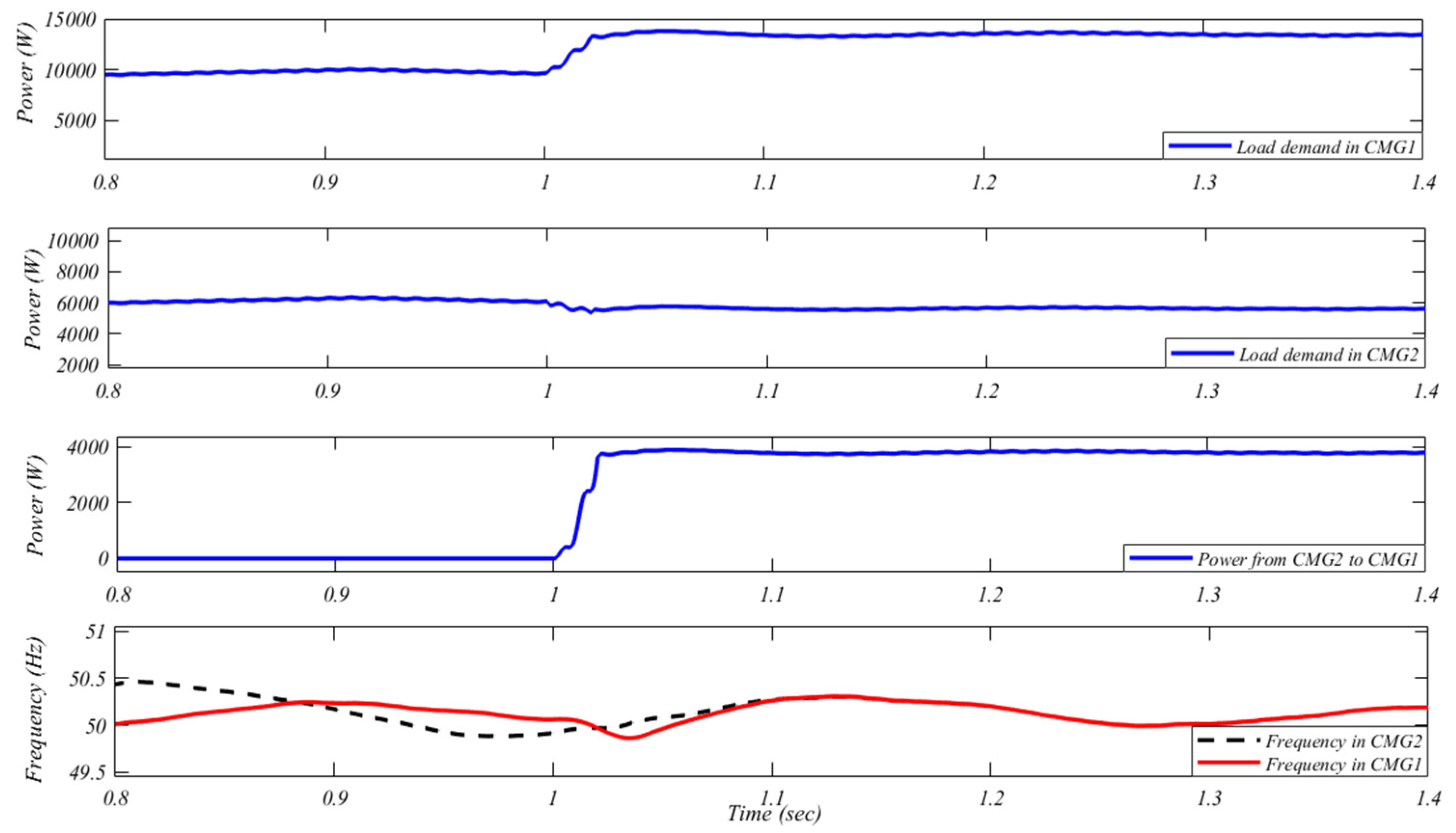
4.2. CMG1 Is Overloaded
4.3. CMG2 Is Overloaded
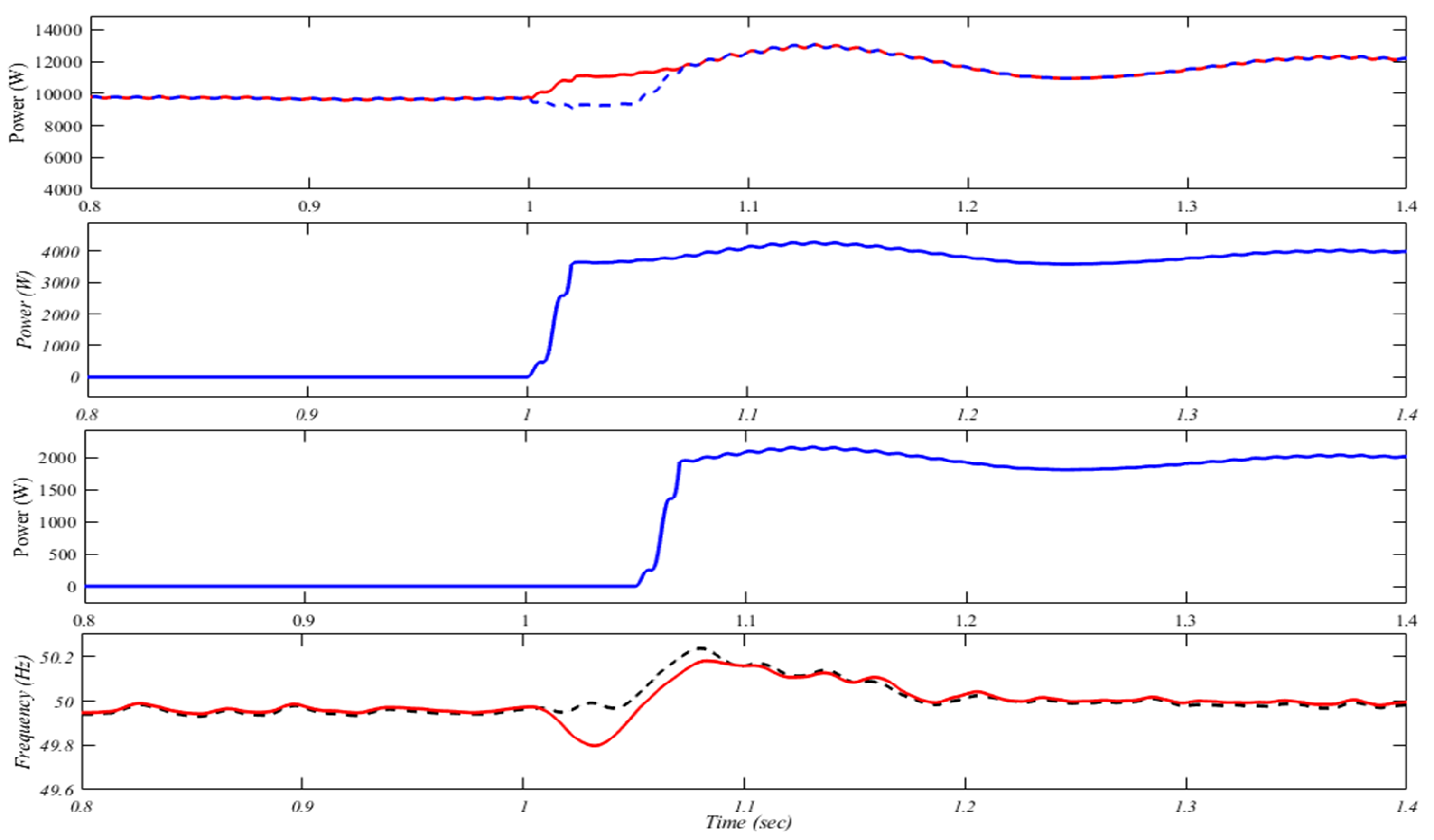
4.4. CMG1 & CMG2 Both Are Overloaded
4.5. CMG1 & CMG2 Both Are Underloaded
5. Experimental Results
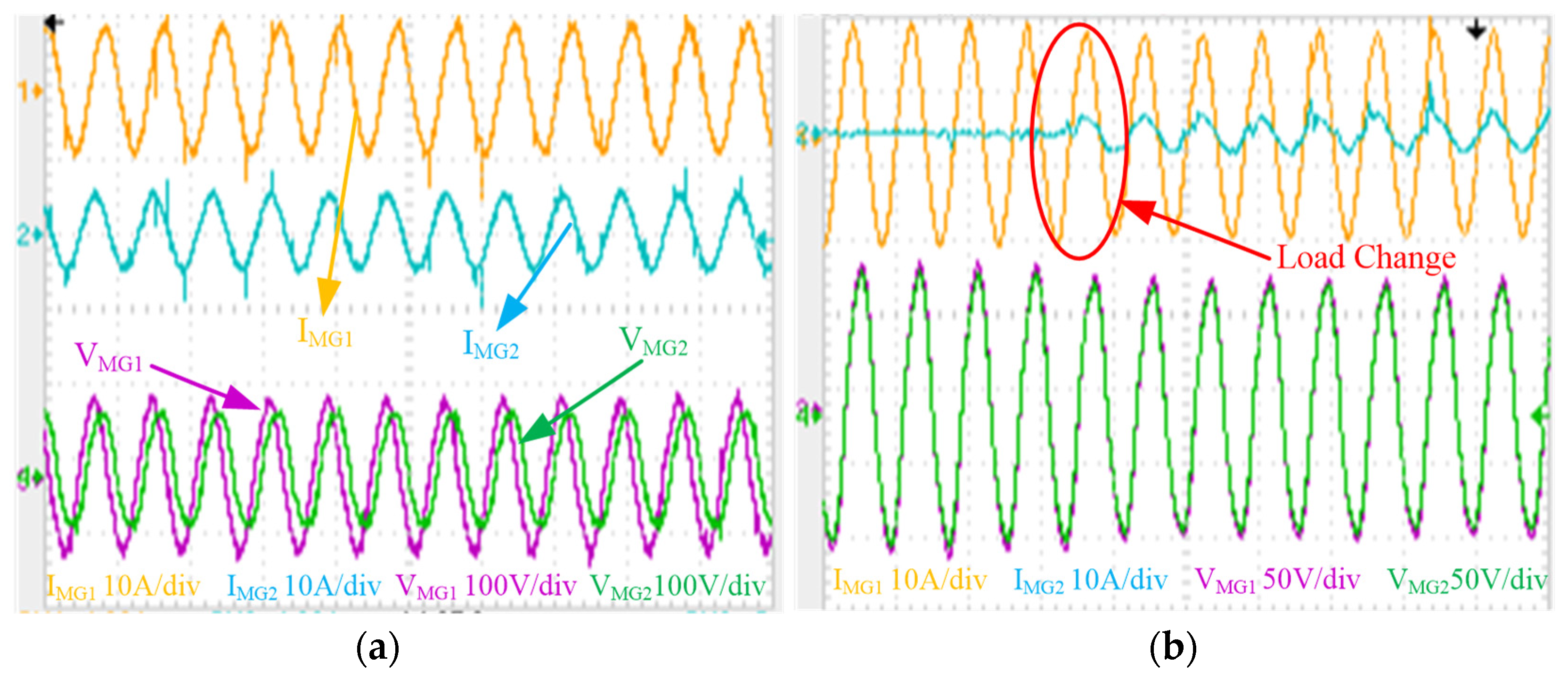
5.1. Case 1: MGs Are Operated Independently and Sudden Load Change
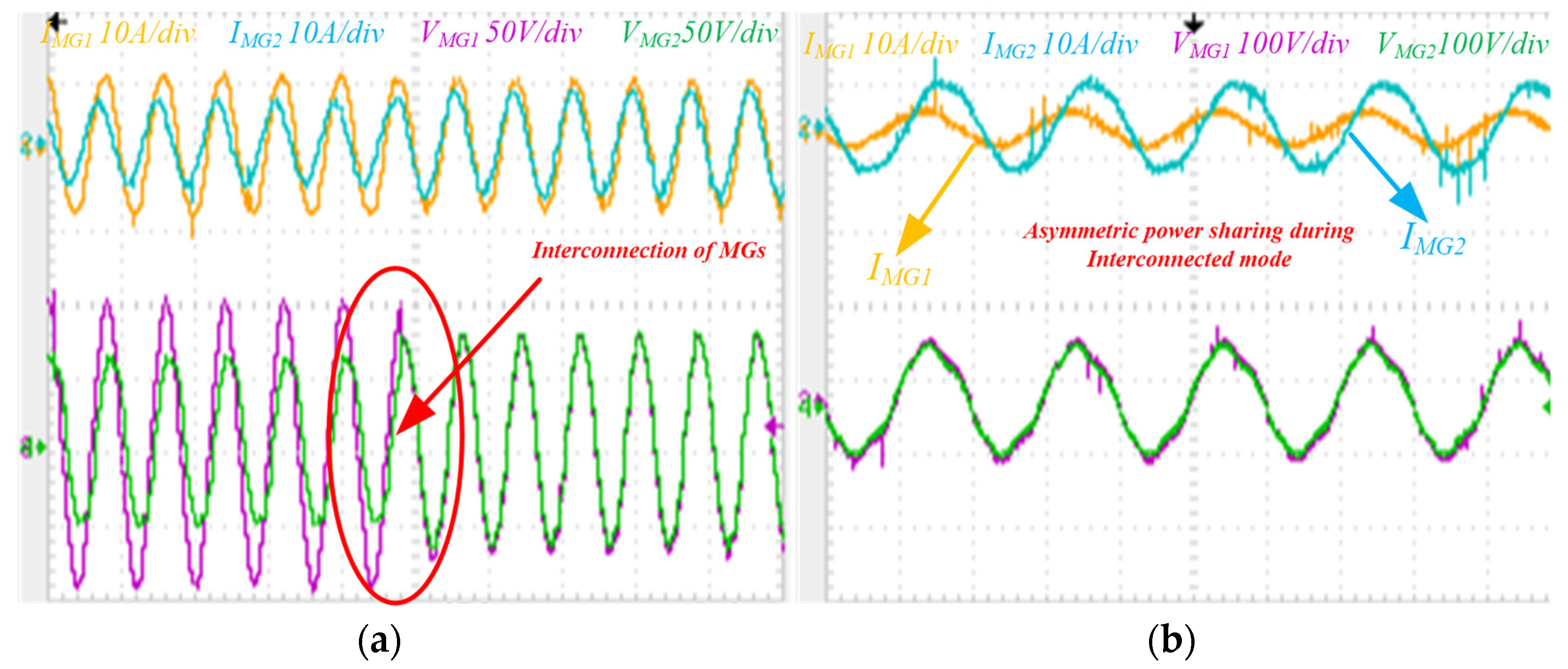
5.2. Case 2: Symmetric and Asymmetric Power-Sharing
5.3. Case 3: Power Transfer between the Microgrids
6. Conclusions
- An efficient coupling scheme for available power-sharing among the neighbouring microgrid is developed. The proposed scheme is able to support neighbouring CMGs during any kind of contingency.
- The power management-based setpoint calculation for the droop control provides an accurate power-sharing between the MGs. The proposed topology is able to share the power among the MGs in asymmetric way as-well, which does not restrict the inverters for equal power-sharing. The experimental results corroborated the benefits of this unique features.
- The frequency of the proposed system is maintained within the acceptable allowable range (50 Hz ± 1) with the help of PM based droop control. A wide range of case studies has been considered, and the efficacy of the proposed controller for frequency regulation is verified.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations and Notations
| EC | Energy community |
| PM | Power management |
| CMG | Community microgrids |
| RES | Renewable energy sources |
| BESS | Battery energy storage systems |
| SC | Supercapacitors |
| PV | Photovoltaics |
| SoC | State of charge |
| DG | Distributed generation |
| kɷ | Frequency droop co-efficient |
| kV | Voltage droop co-efficient |
| ɷ* | Nominal value of frequency |
| V* | Nominal value of voltage |
| ω0 | Grid Frequency |
| ωisolated | Standalone/isolated Frequency |
| P1 & P2 | Generated Power from CMG1 & CMG2 |
| P1* & P2* | Power setpoints of CMG1 & CMG2 |
| PL1 | Load power demand in CMG1 |
| PL2 | Load power demand in CMG2 |
| C | DC link capacitor |
| Lf1 & Lf2 | LCL Filter Inductors |
| Cf | LCL Filter Capacitor |
References
- Renewable Energy—Recast to 2030 (RED II) | EU Science Hub. Available online: https://ec.europa.eu/jrc/en/jec/renewable-energy-recast-2030-red-ii (accessed on 17 November 2020).
- Di Lorenzo, G.; Rotondo, S.; Araneo, R.; Petrone, G.; Martirano, L. Innovative power-sharing model for buildings and energy communities. Renew. Energy 2021, 172, 1087–1102. [Google Scholar] [CrossRef]
- Energy Communities | Energy. Available online: https://ec.europa.eu/energy/topics/markets-and-consumers/energy-communities_en (accessed on 22 August 2021).
- Fichera, A.; Marrasso, E.; Sasso, M.; Volpe, R. Energy, Environmental and Economic Performance of an Urban Community Hybrid Distributed Energy System. Energies 2020, 13, 2545. [Google Scholar] [CrossRef]
- Ceglia, F.; Marrasso, E.; Roselli, C.; Sasso, M. Small Renewable Energy Community: The Role of Energy and Environmental Indicators for Power Grid. Sustainability 2021, 13, 2137. [Google Scholar] [CrossRef]
- Erdinc, O.; Vural, B.; Uzunoglu, M. A wavelet-fuzzy logic based energy management strategy for a fuel cell/battery/ultra-capacitor hybrid vehicular power system. J. Power Sources 2009, 194, 369–380. [Google Scholar] [CrossRef]
- Soomro, A.; Pullen, K.R.; Amiryar, M.E. Hybrid PV System with High Speed Flywheel Energy Storage for Remote Residential Loads. Clean Technol. 2021, 3, 20. [Google Scholar] [CrossRef]
- Lasseter, R.H. Smart Distribution: Coupled Microgrids. Proc. IEEE 2011, 99, 1074–1082. [Google Scholar] [CrossRef]
- Batool, M.; Islam, S.M.; Shahnia, F. Master control unit based power exchange strategy for interconnected microgrids. In Proceedings of the 2017 Australasian Universities Power Engineering Conference (AUPEC), Melbourne, VIC, Australia, 19–22 November 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Bourbour, S.; Shahnia, F. Impact of the weightings of different criteria in selecting the suitable microgrids when forming a system of coupled microgrids. In Proceedings of the 2016 IEEE Innovative Smart Grid Technologies—Asia (ISGT-Asia), Melbourne, Australia, 28 November–1 December 2016; pp. 1151–1156. [Google Scholar] [CrossRef]
- Shahnia, F.; Bourbour, S.; Ghosh, A. Coupling Neighboring Microgrids for Overload Management Based on Dynamic Multicriteria Decision-Making. IEEE Trans. Smart Grid 2015, 8, 969–983. [Google Scholar] [CrossRef]
- Jafari, M.; Malekjamshidi, Z.; Zhu, J. A magnetically coupled multi-port, multi-operation-mode micro-grid with a predictive dynamic programming-based energy management for residential applications. Int. J. Electr. Power Energy Syst. 2019, 104, 784–796. [Google Scholar] [CrossRef]
- Shahnia, F.; Bourbour, S. A practical and intelligent technique for coupling multiple neighboring microgrids at the synchronization stage. Sustain. Energy Grids Netw. 2017, 11, 13–25. [Google Scholar] [CrossRef]
- Pashajavid, E.; Shahnia, F.; Ghosh, A. Interconnection of two neighboring autonomous microgrids based on small signal analysis. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 213–220. [Google Scholar] [CrossRef]
- Laaksonen, H.; Saari, P.; Komulainen, R. Voltage and frequency control of inverter based weak LV network microgrid. In Proceedings of the 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 1 January 2005; p. 6. [Google Scholar] [CrossRef]
- Zhou, X.; Zhou, L.; Chen, Y.; Guerrero, J.M.; Luo, A.; Wu, W.; Yang, L. A microgrid cluster structure and its autonomous coordination control strategy. Int. J. Electr. Power Energy Syst. 2018, 100, 69–80. [Google Scholar] [CrossRef]
- Li, F.; Qin, J.; Wan, Y.; Yang, T. Decentralized Cooperative Optimal Power Flow of Multiple Interconnected Microgrids via Negotiation. IEEE Trans. Smart Grid 2020, 11, 3827–3836. [Google Scholar] [CrossRef]
- Jena, S.; Kar, S.K. Defining indispensability of storage for raised renewable penetration in conventional and thermoelectric coupled microgrid: Modeling, analysis and validation. Int. J. Energy Res. 2020, 44, 5947–5967. [Google Scholar] [CrossRef]
- Liu, Q.; Caldognetto, T.; Buso, S. Flexible Control of Interlinking Converters for DC Microgrids Coupled to Smart AC Power Systems. IEEE Trans. Ind. Electron. 2019, 66, 3477–3485. [Google Scholar] [CrossRef]
- Wu, D.; Tang, F.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Autonomous Active Power Control for Islanded AC Microgrids With Photovoltaic Generation and Energy Storage System. IEEE Trans. Energy Convers. 2014, 29, 882–892. [Google Scholar] [CrossRef] [Green Version]
- Moazami Goodarzi, H.; Kazemi, M.H. An optimal autonomous microgrid cluster based on distributed generation droop parameter optimization and renewable energy sources using an improved grey wolf optimizer. Eng. Optim. 2018, 50, 819–839. [Google Scholar] [CrossRef]
- Liu, B.; Wu, T.; Liu, Z.; Liu, J. A Small-AC-Signal Injection-Based Decentralized Secondary Frequency Control for Droop-Controlled Islanded Microgrids. IEEE Trans. Power Electron. 2020, 35, 11634–11651. [Google Scholar] [CrossRef]
- Alam, M.N.; Chakrabarti, S.; Ghosh, A. Networked Microgrids: State-of-the-Art and Future Perspectives. IEEE Trans. Ind. Informatics 2019, 15, 1238–1250. [Google Scholar] [CrossRef]
- Cheong, D.M.L.K.; Fernando, T.; Iu, H.C.; Reynolds, M.; Fletcher, J. Review of clustering algorithms for microgrid formation. In Proceedings of the 2017 IEEE Innovative Smart Grid Technologies—Asia (ISGT-Asia); IEEE: Manhattan, NY, USA, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, H.; Mahmoudi, N.; Chen, K.; Liu, H.; Mahmoudi, N.; Chen, K. Microgrids Real-Time Pricing Based on Clustering Techniques. Energies 2018, 11, 1388. [Google Scholar] [CrossRef] [Green Version]
- Wei, B.; Marzabal, A.; Ruiz, R.; Guerrero, J.M.; Vasquez, J.C. DAVIC: A New Distributed Adaptive Virtual Impedance Control for Parallel-Connected Voltage Source Inverters in Modular UPS System. IEEE Trans. Power Electron. 2019, 34, 5953–5968. [Google Scholar] [CrossRef] [Green Version]
- Sahoo, S.; Mishra, S.; Jha, S.; Singh, B. A Cooperative Adaptive Droop Based Energy Management and Optimal Voltage Regulation Scheme for DC Microgrids. IEEE Trans. Ind. Electron. 2019, 67, 2894–2904. [Google Scholar] [CrossRef]
- Raman, G.; Peng, J.C.-H.; Zeineldin, H.H. Optimal Damping Recovery Scheme for Droop-controlled Inverter-based Microgrids. IEEE Trans. Smart Grid 2020, 11, 2805–2815. [Google Scholar] [CrossRef]
- Tayab, U.B.; Roslan, M.A.B.; Hwai, L.J.; Kashif, M. A review of droop control techniques for microgrid. Renew. Sustain. Energy Rev. 2017, 76, 717–727. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Decentralized Power Management of a PV/Battery Hybrid Unit in a Droop-Controlled Islanded Microgrid. IEEE Trans. Power Electron. 2015, 30, 7215–7229. [Google Scholar] [CrossRef]
- Mahmood, H.; Jiang, J. Autonomous Coordination of Multiple PV/Battery Hybrid Units in Islanded Microgrids. IEEE Trans. Smart Grid 2017, 1. [Google Scholar] [CrossRef]
- Lahnaoui, A.; Stenzel, P.; Linssen, J. Techno-economic analysis of photovoltaic battery system configuration and location☆. Appl. Energy 2018, 227, 497–505. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Glover, J.D.; Overbye, T.J. Power System Analysis and Design; Thomas, J., Sarma, M.S., Eds.; Cengage Learning: Stamford, CT, USA, 2012; ISBN 9781305632134. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | |
|---|---|
| DC Link Capacitor (C) | 2000 µF |
| Filter Inductor (Lf1 & Lf2) | 6.8 mH |
| Filter Capacitor (Cf) | 30 µF |
| Power Rating for Inverter 1 | 10 kW |
| Power Rating for Inverter 2 | 10 kW |
| BESS Capacity | 10 kWh |
| Frequency drooping gain | 0.05 rad/s/W |
| Voltage drooping gain | 0.01 V/var |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patra, S.; Madichetty, S.; Basu, M. Development of a Smart Energy Community by Coupling Neighbouring Community Microgrids for Enhanced Power Sharing Using Customised Droop Control. Energies 2021, 14, 5383. https://doi.org/10.3390/en14175383
Patra S, Madichetty S, Basu M. Development of a Smart Energy Community by Coupling Neighbouring Community Microgrids for Enhanced Power Sharing Using Customised Droop Control. Energies. 2021; 14(17):5383. https://doi.org/10.3390/en14175383
Chicago/Turabian StylePatra, Sandipan, Sreedhar Madichetty, and Malabika Basu. 2021. "Development of a Smart Energy Community by Coupling Neighbouring Community Microgrids for Enhanced Power Sharing Using Customised Droop Control" Energies 14, no. 17: 5383. https://doi.org/10.3390/en14175383
APA StylePatra, S., Madichetty, S., & Basu, M. (2021). Development of a Smart Energy Community by Coupling Neighbouring Community Microgrids for Enhanced Power Sharing Using Customised Droop Control. Energies, 14(17), 5383. https://doi.org/10.3390/en14175383