
Robust L Approximation of an LCL Filter Type Grid-Connected Inverter Using Active Disturbance Rejection Control under Grid Impedance Uncertainty




Abstract
:1. Introduction
- The first-order linear ADRC with FESO and RESO is proposed for the L and LCL filter type GcI with the inverter side current control separately.
- The proposed controller is first designed for the L filter type GcI, and later a similar design is adopted for the LCL filter type GcI with minimum tuning.
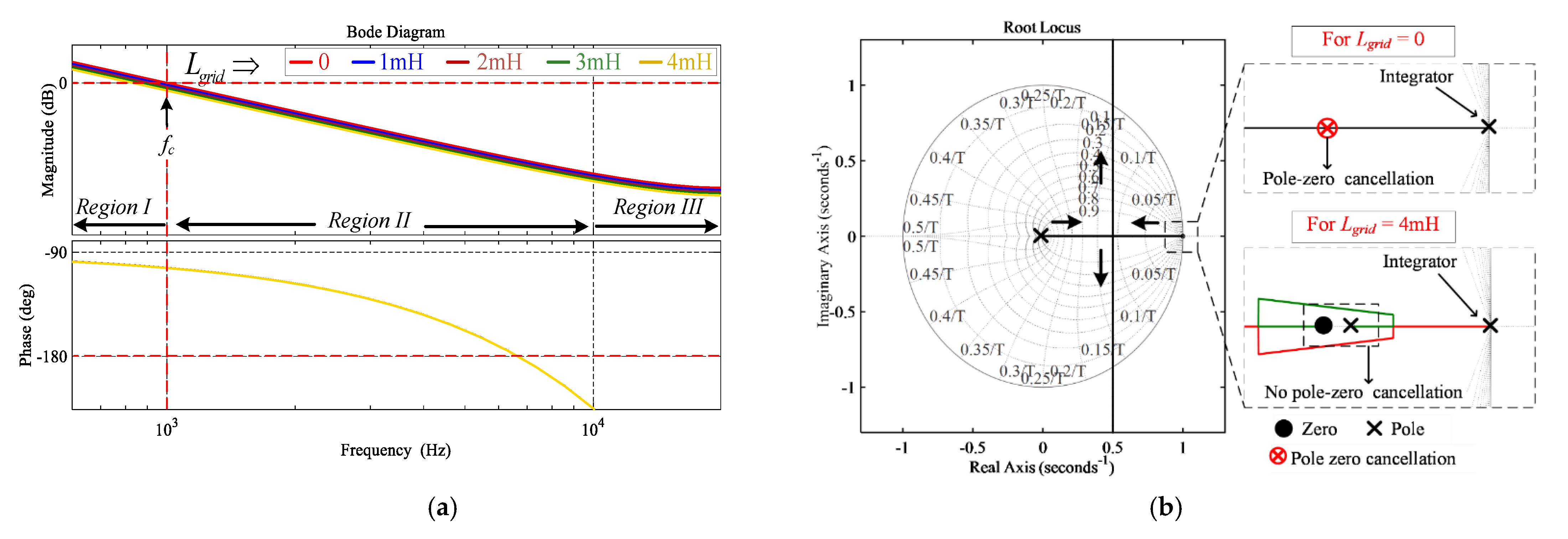
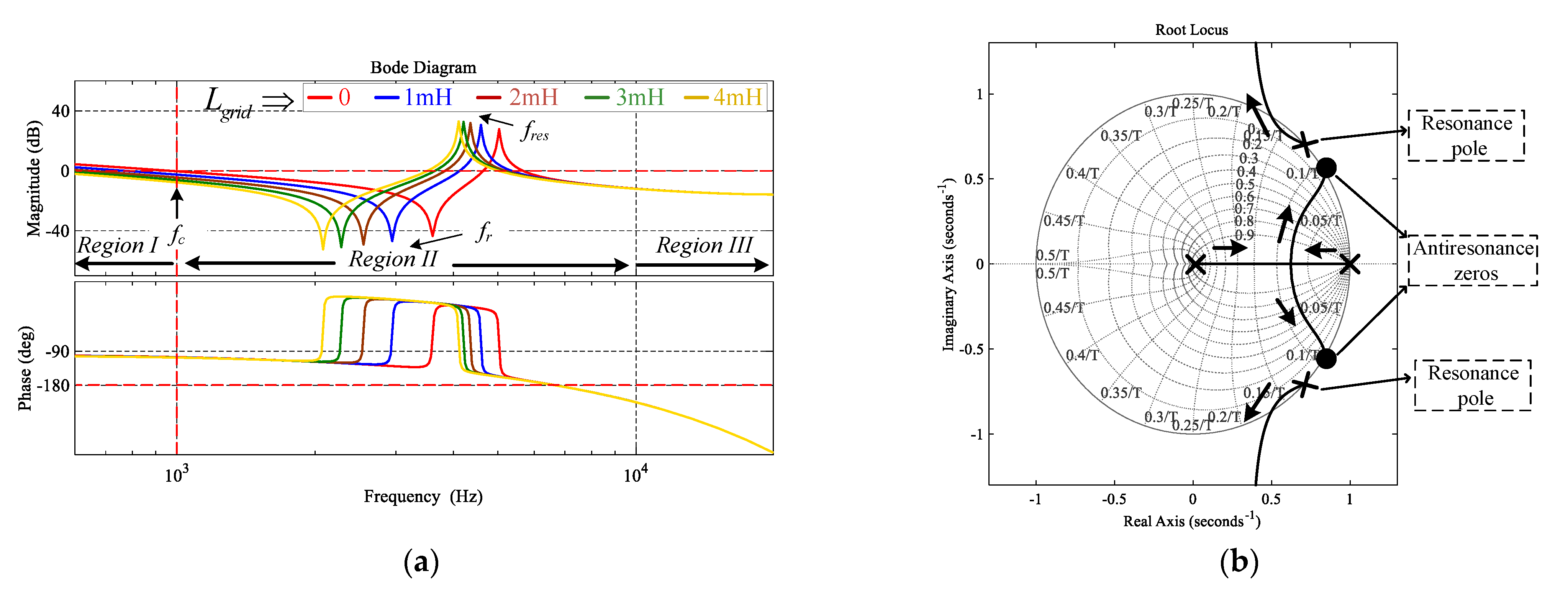
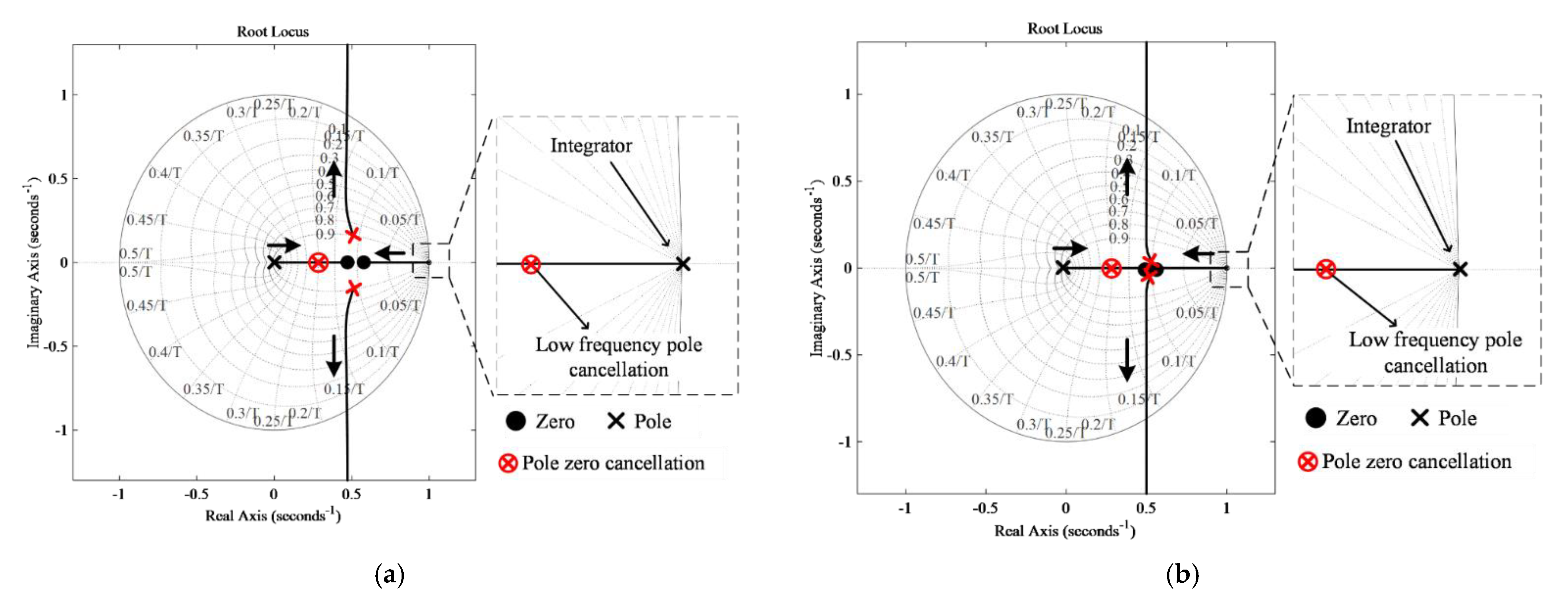
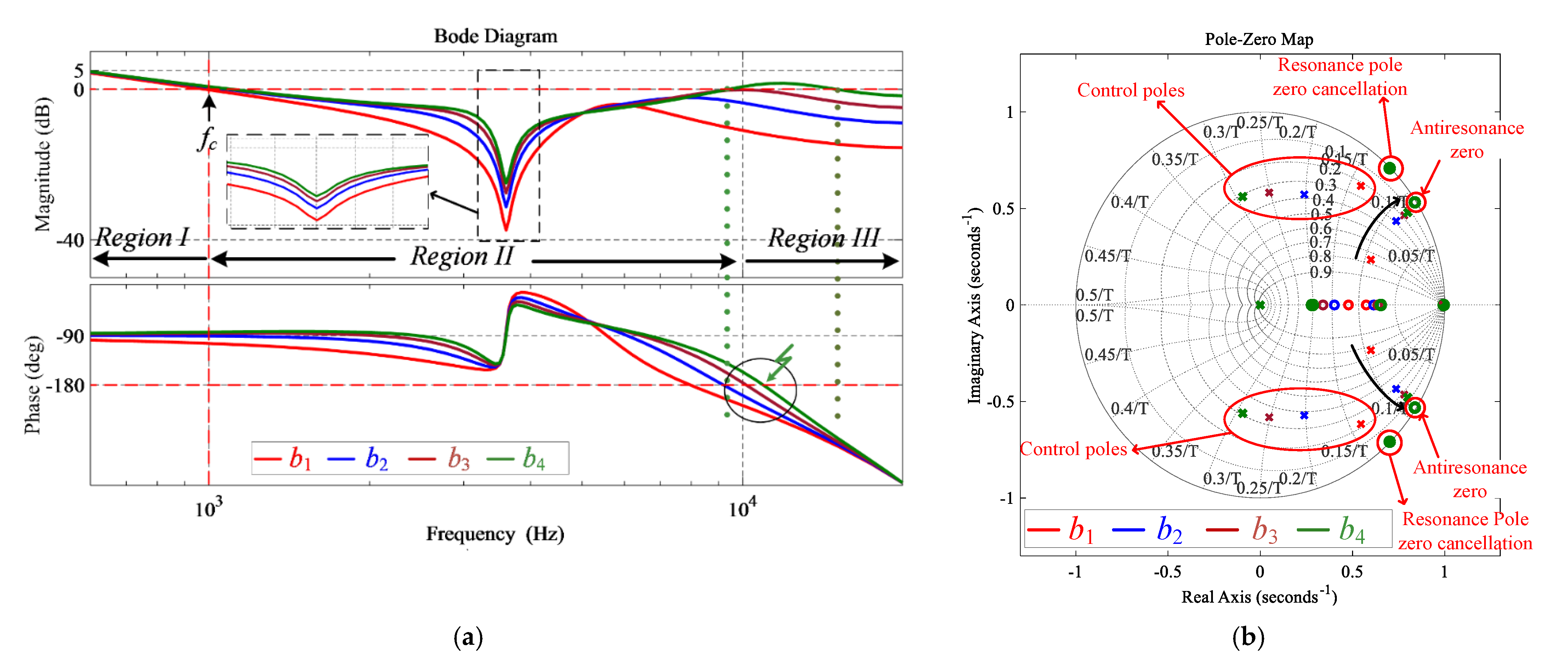
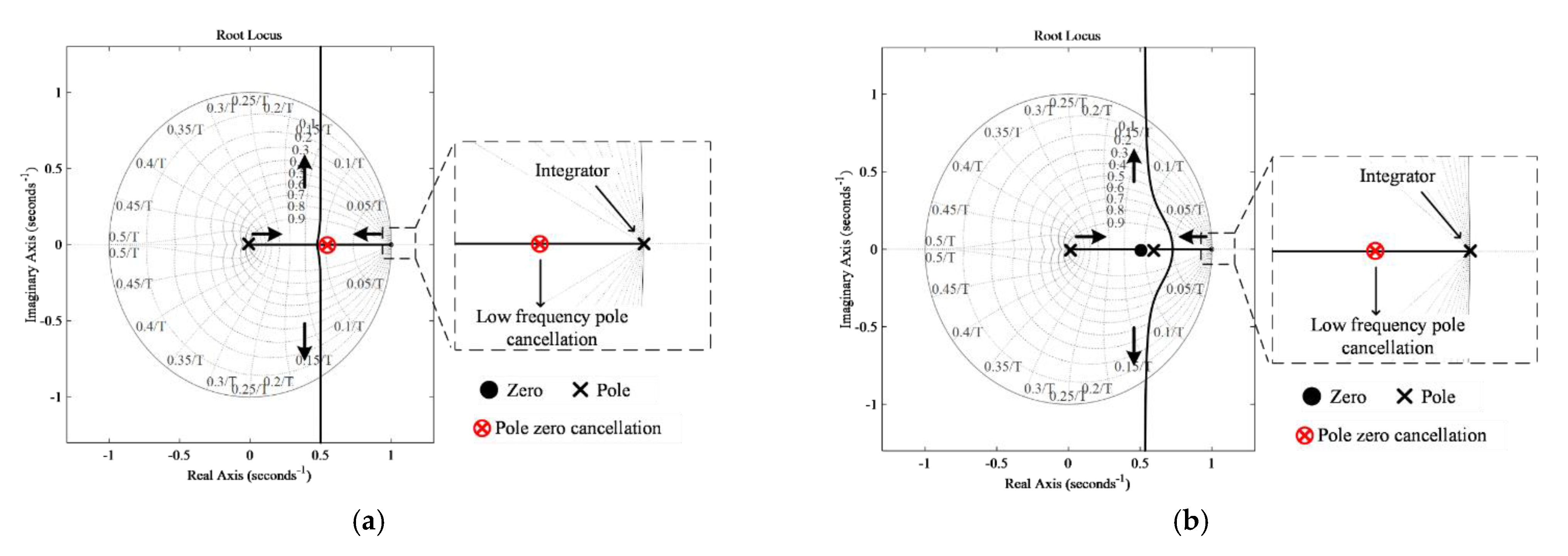
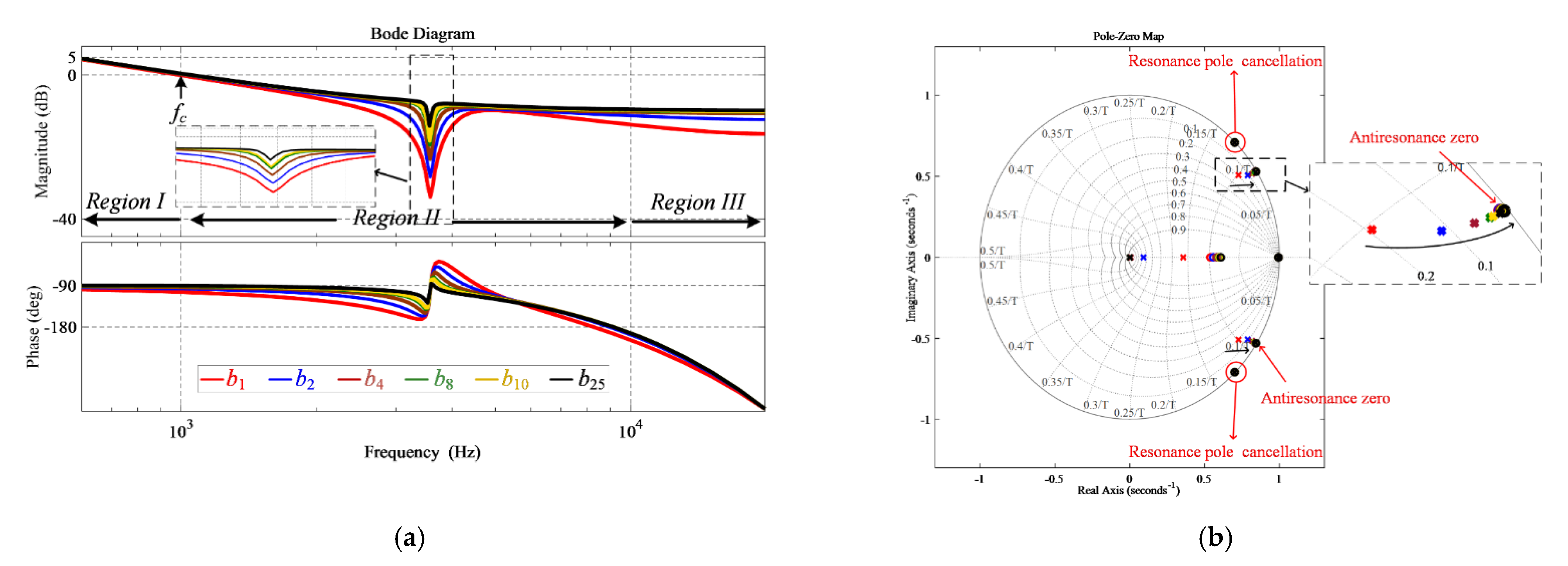
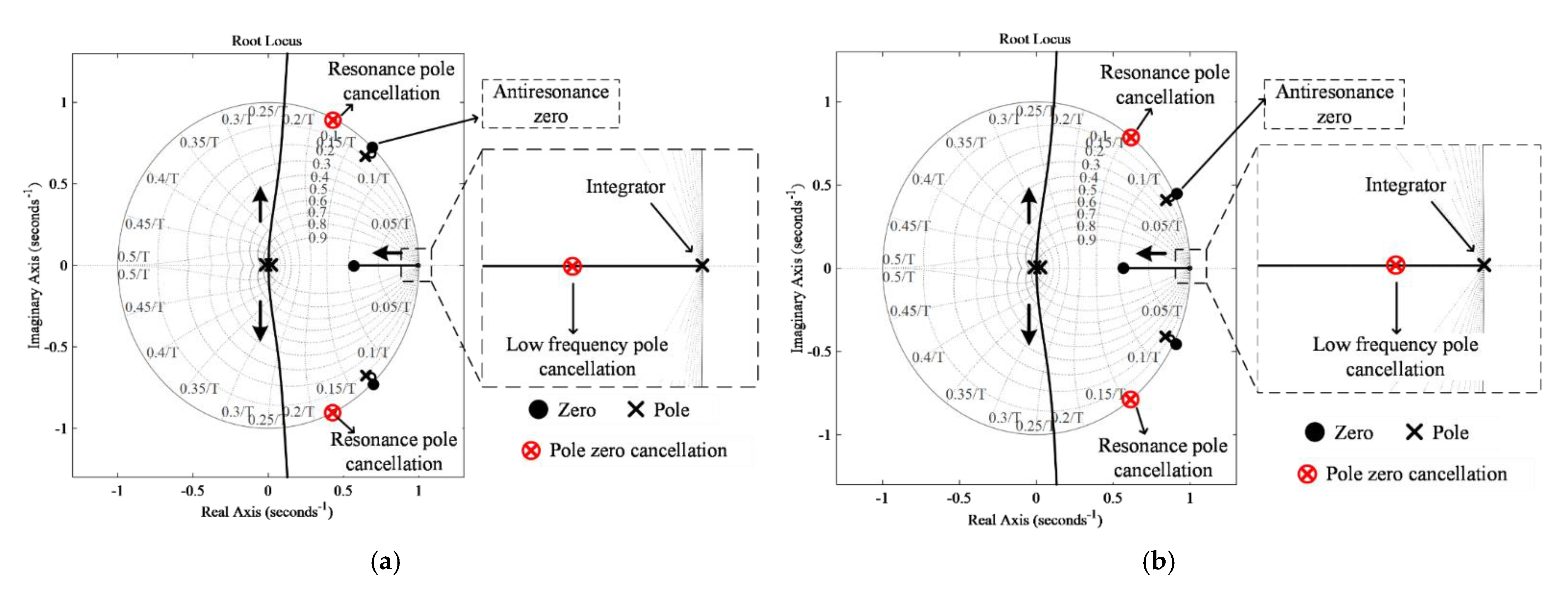
- The resonance poles in the LCL filter are effectively cancelled out with the pole-zero cancellation technique. In addition, the effect of antiresonance is greatly reduced by applying a pole near antiresonance zero.
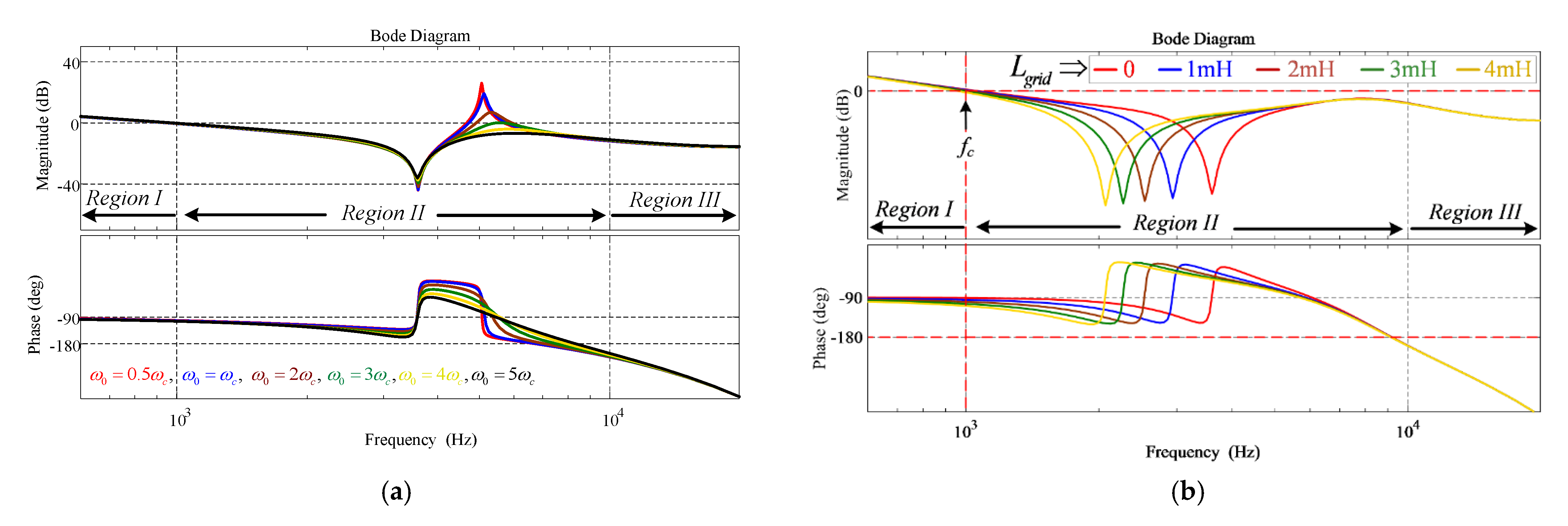
- The control parameters contributing to antiresonance peak reduction are discussed in detail in this paper.
- The resonance poles and antiresonance zeros cancellation can enhance the stability of the controller and overcome the bandwidth limitations.
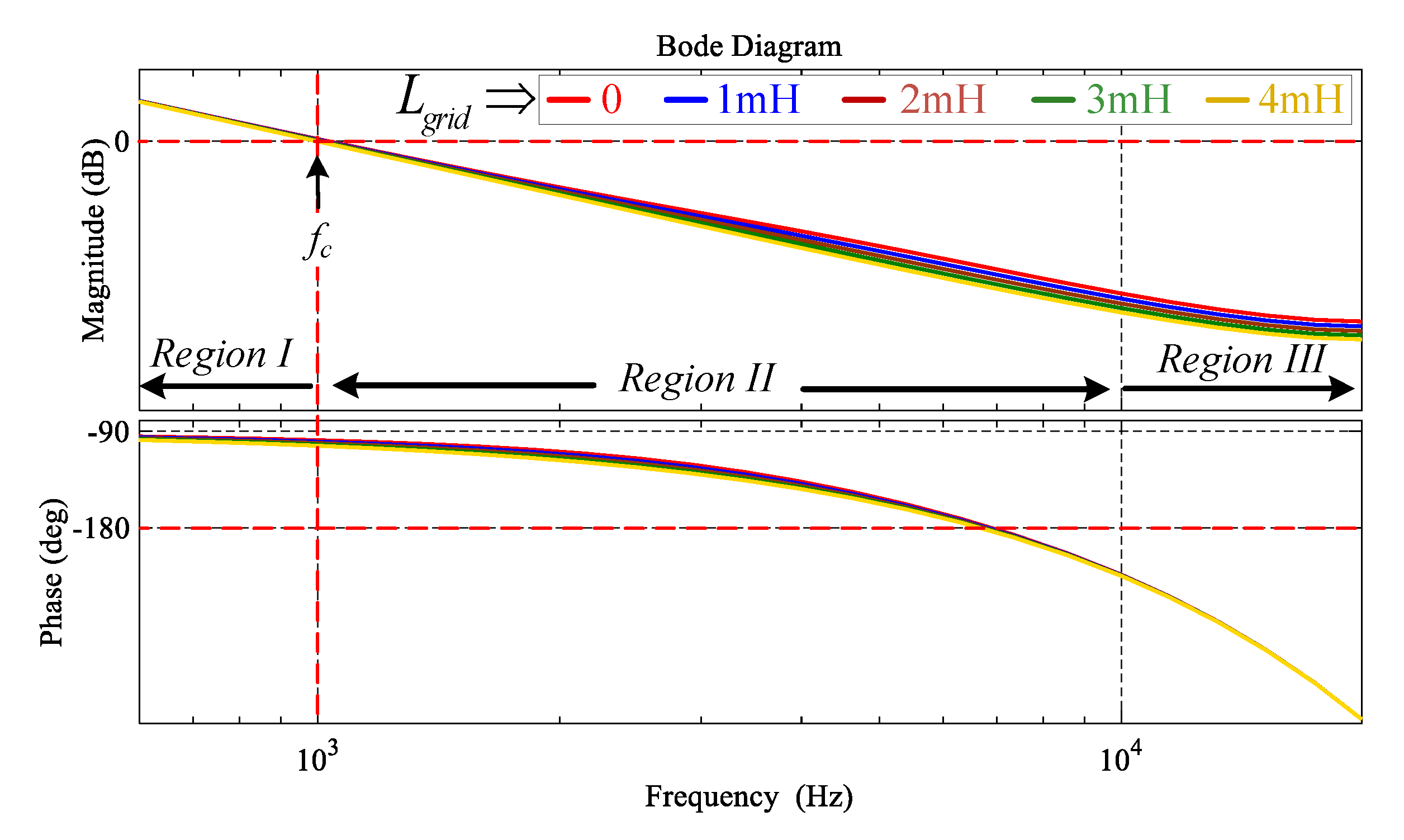
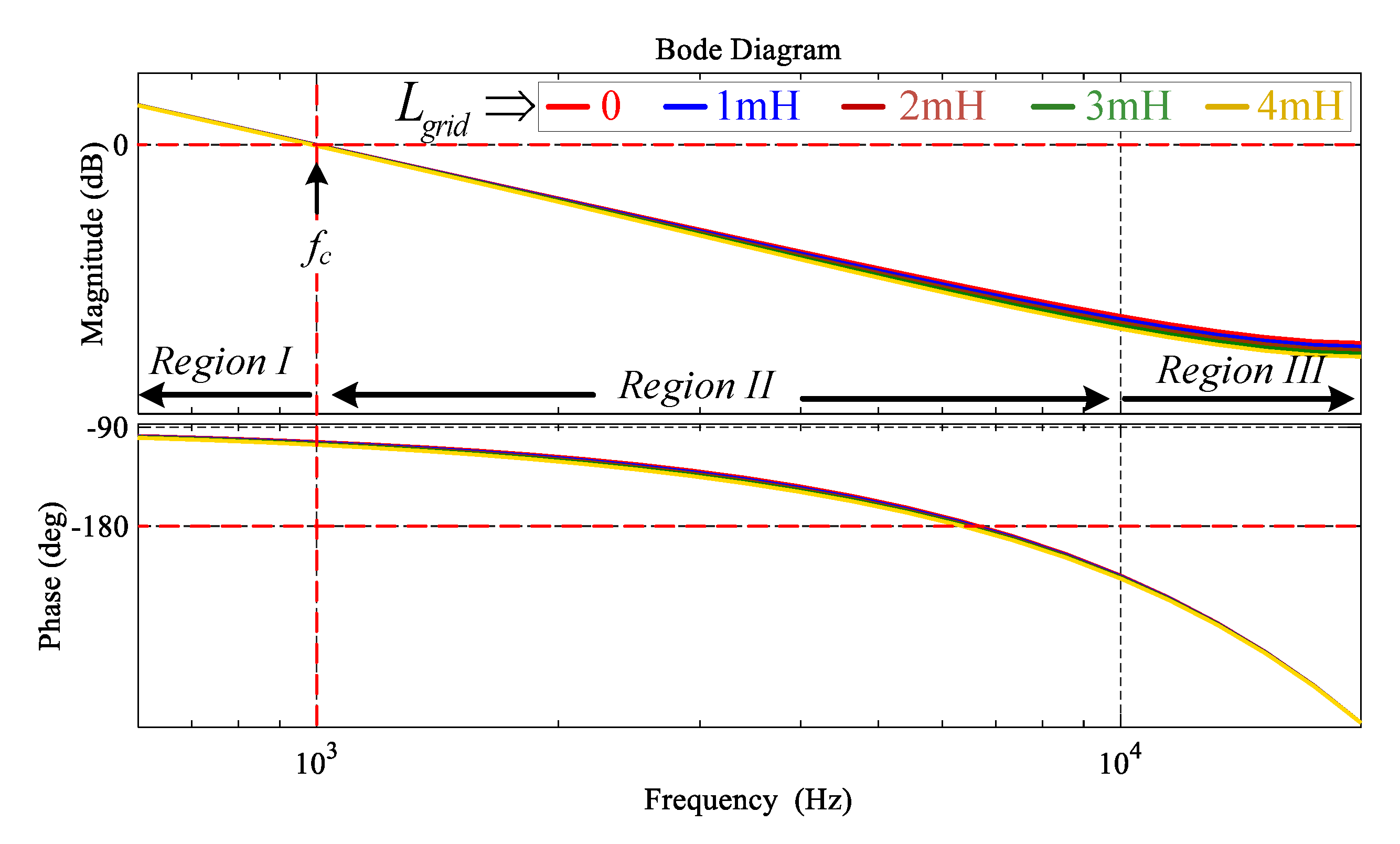
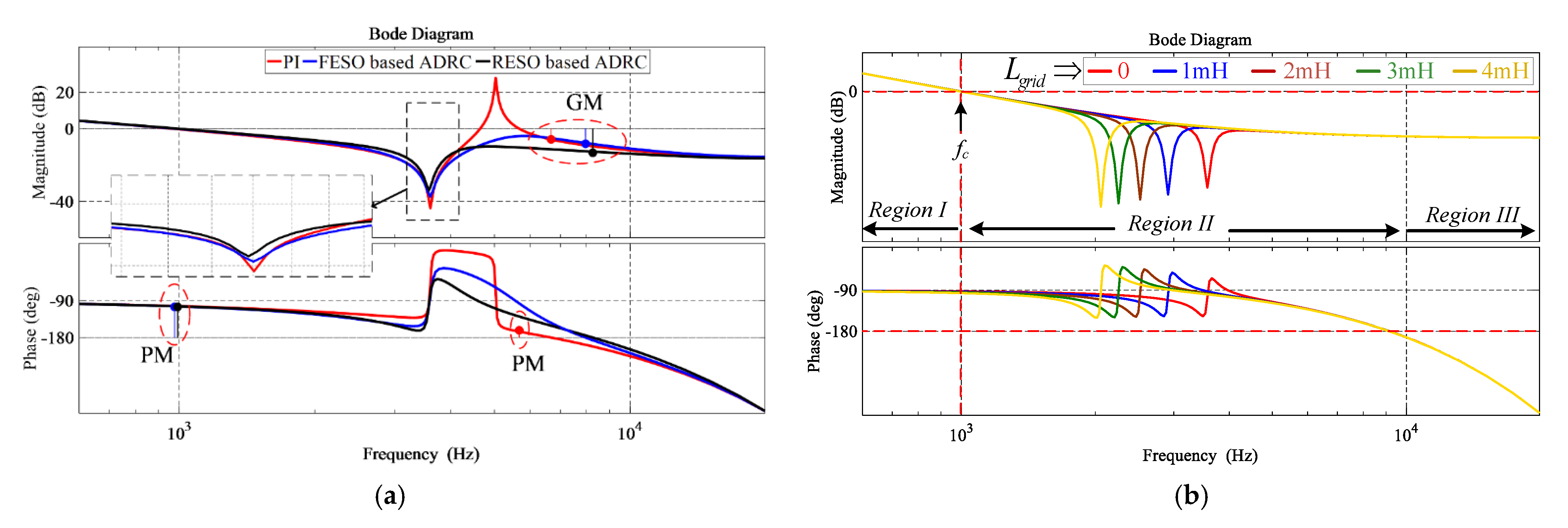
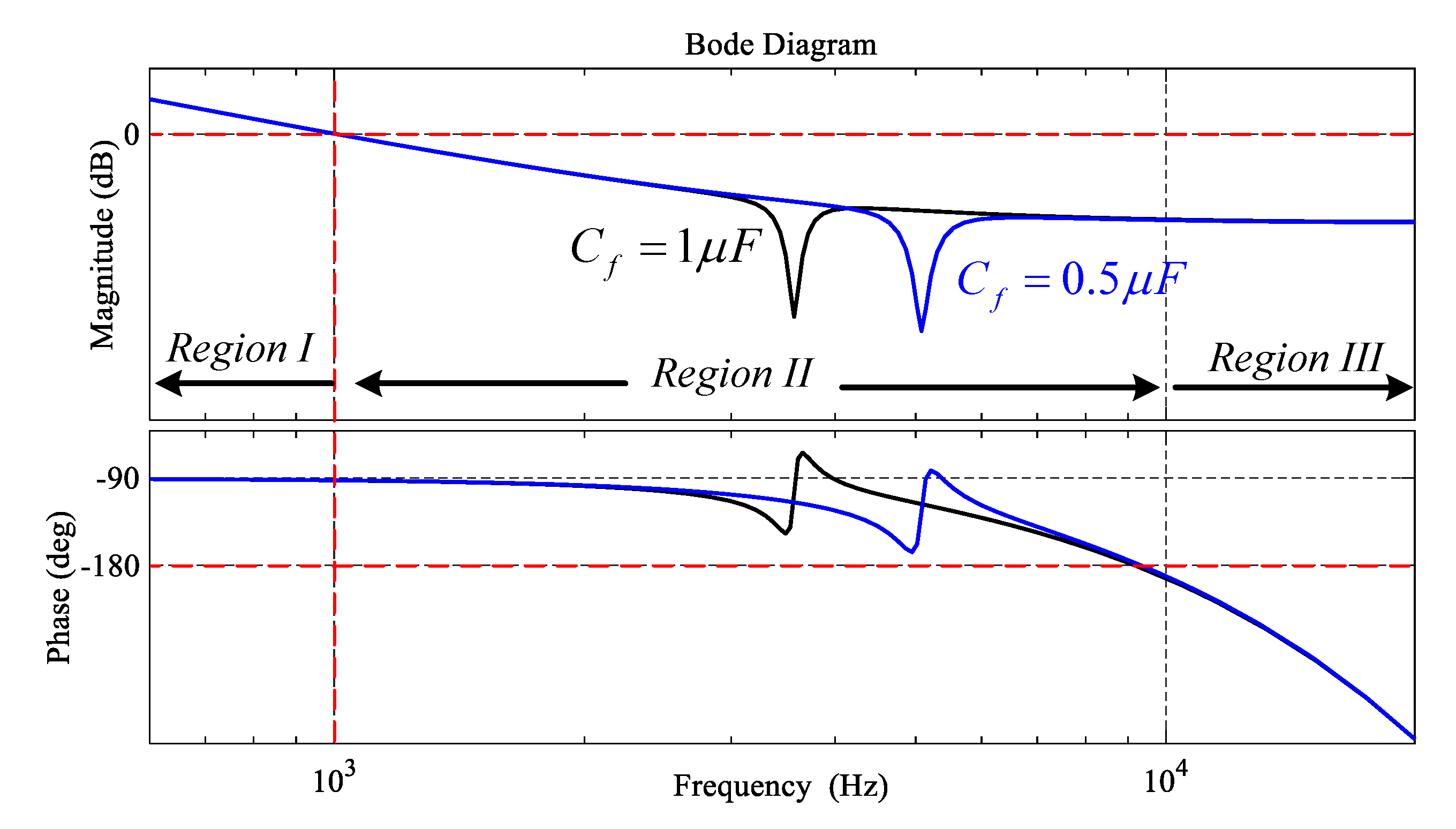
- The effectiveness of the pole-zero cancellation technique of the proposed controller is analyzed by frequency response analysis using Bode plots under different LCL filter design and grid impedance variations.
- The model-independent characteristics of the proposed control are explained from the robust performance of the control with either L or LCL filters under grid impedance uncertainty.
- The robustness of the proposed controller is related with the conventional single-loop PI control via simulation and only RESO based ADRC is compared with the conventional control via experimental results under different configurations of the plant.
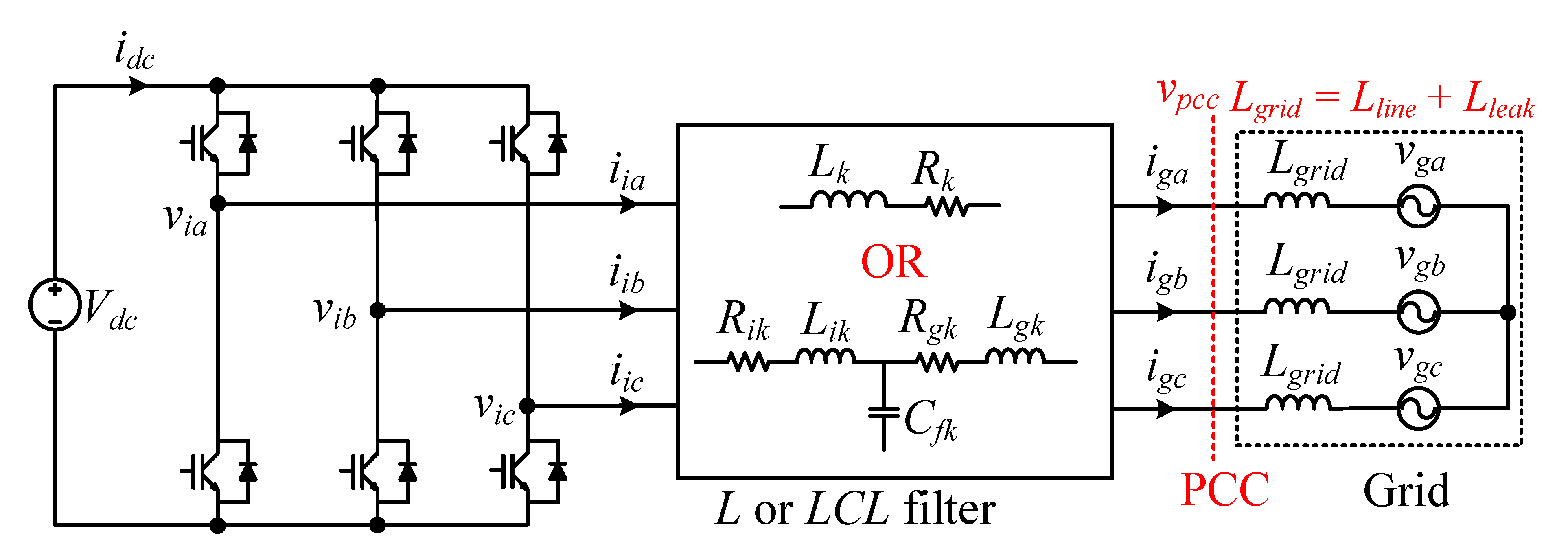
2. Mathematical Modeling of the System and Frequency Response Analysis
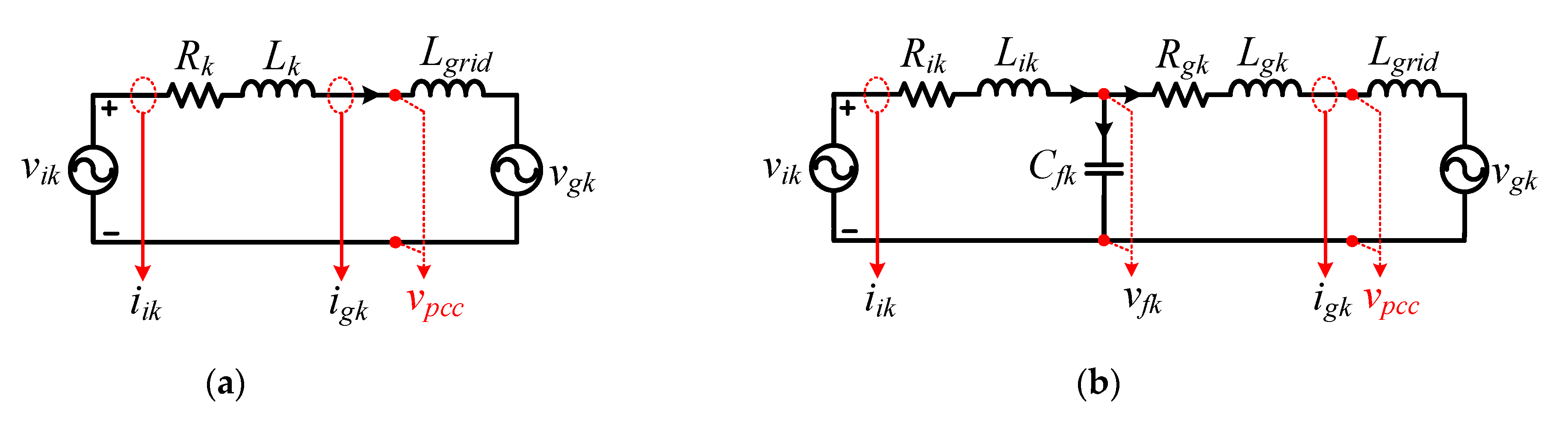
2.1. Mathematical Model of L Filter Type GcI
2.2. Mathematical Model of LCL Filter Type GcI
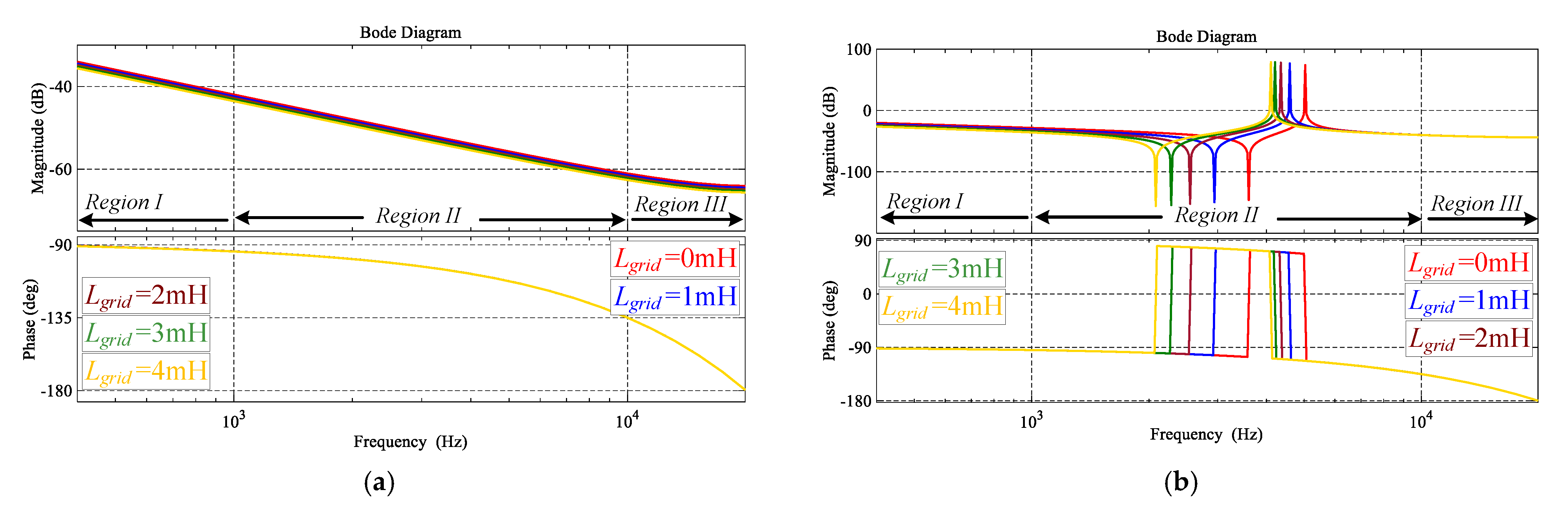
2.3. Frequency Response Analysis
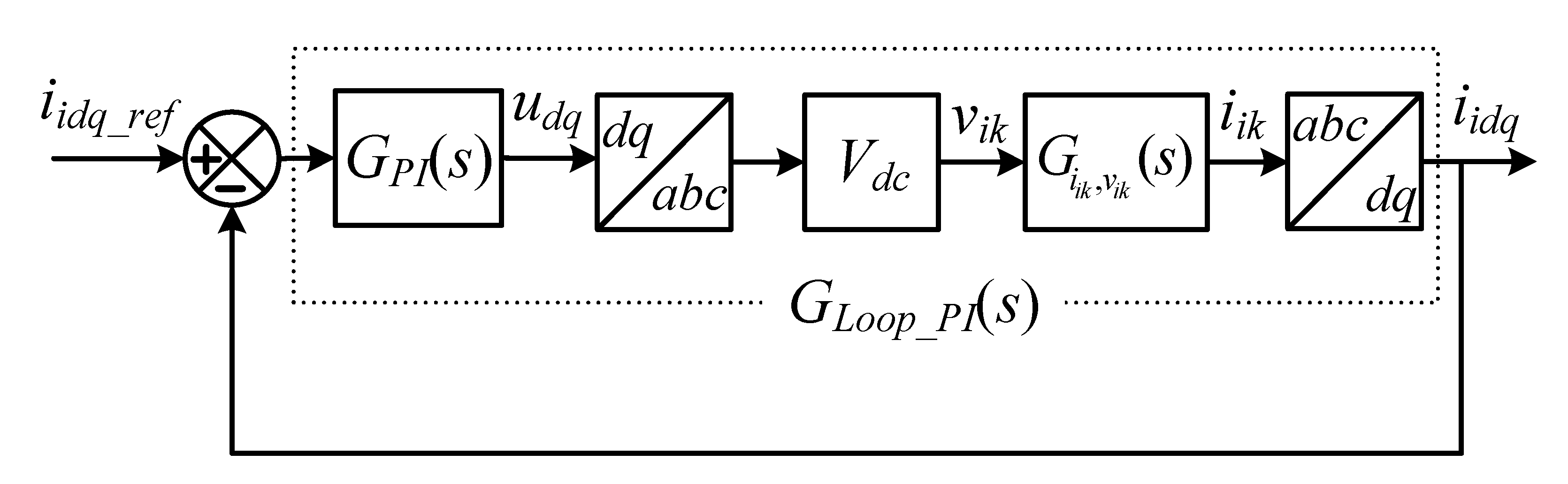
3. Conventional Single-Loop PI Current Control Modeling and Analysis
3.1. Control Modeling
3.2. Frequency Response Analysis
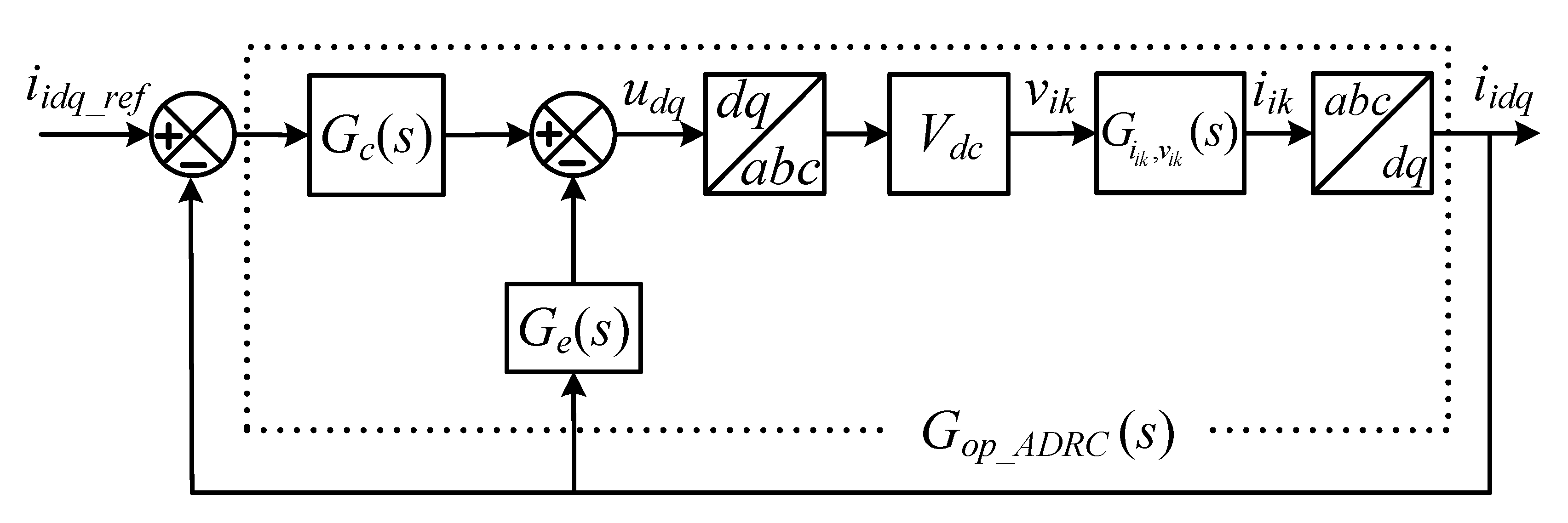
4. Current Control with the Proposed Linear ADRC
4.1. Control Modeling
4.2. Stability Analysis with FESO-Based ADRC
4.2.1. For L Filter Type GcI
4.2.2. For LCL Filter Type GcI
4.3. Stability Analysis of RESO-Based ADRC
For L Filter Type GcI
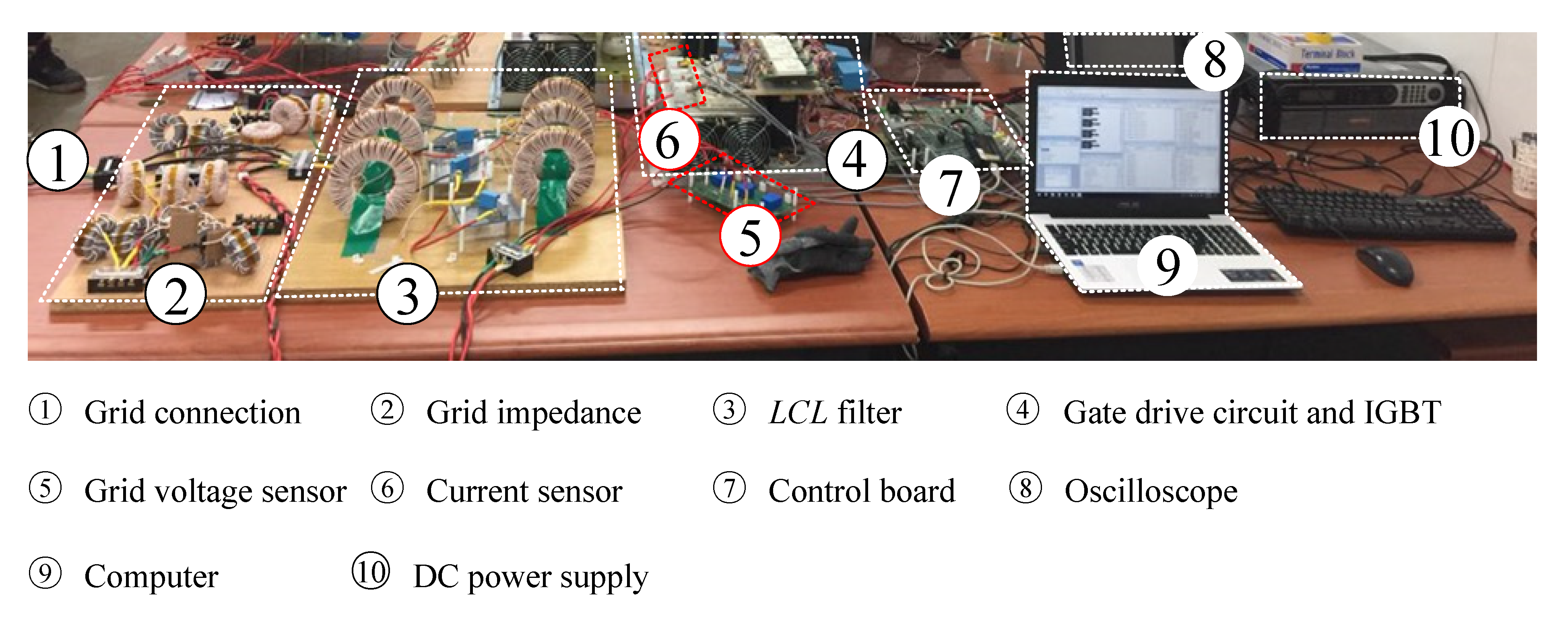
5. Experimental Results
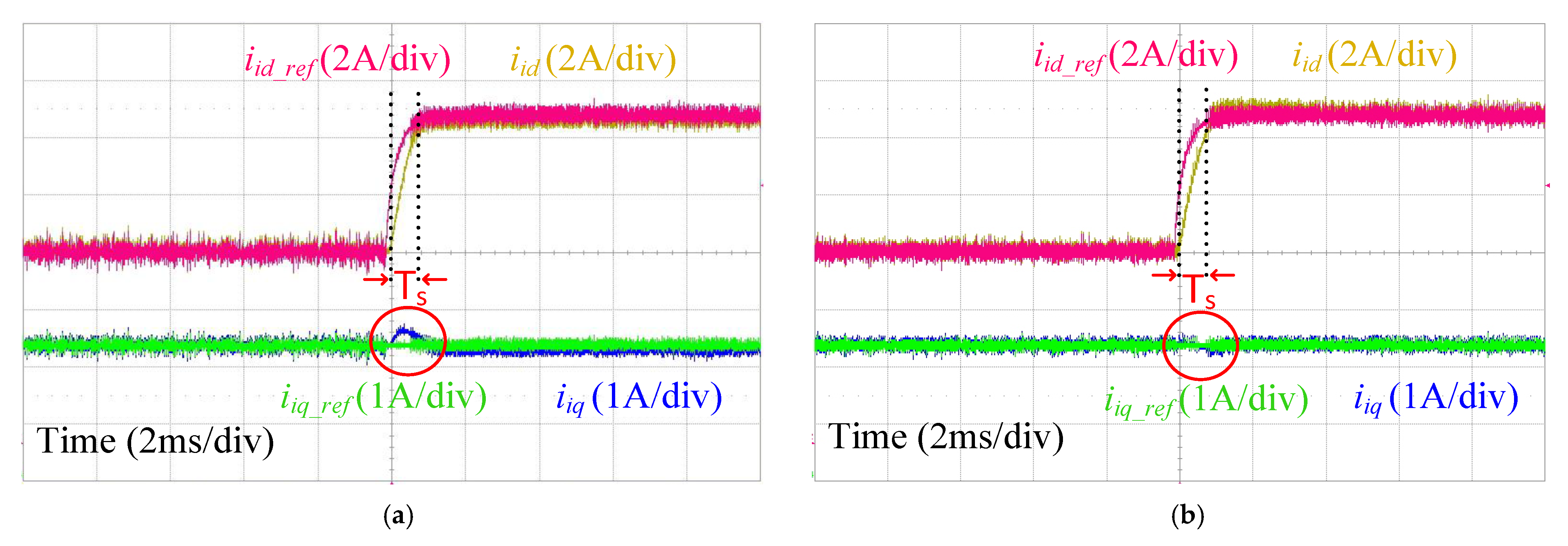
5.1. Performance Comparison with the L Filter Type GcI
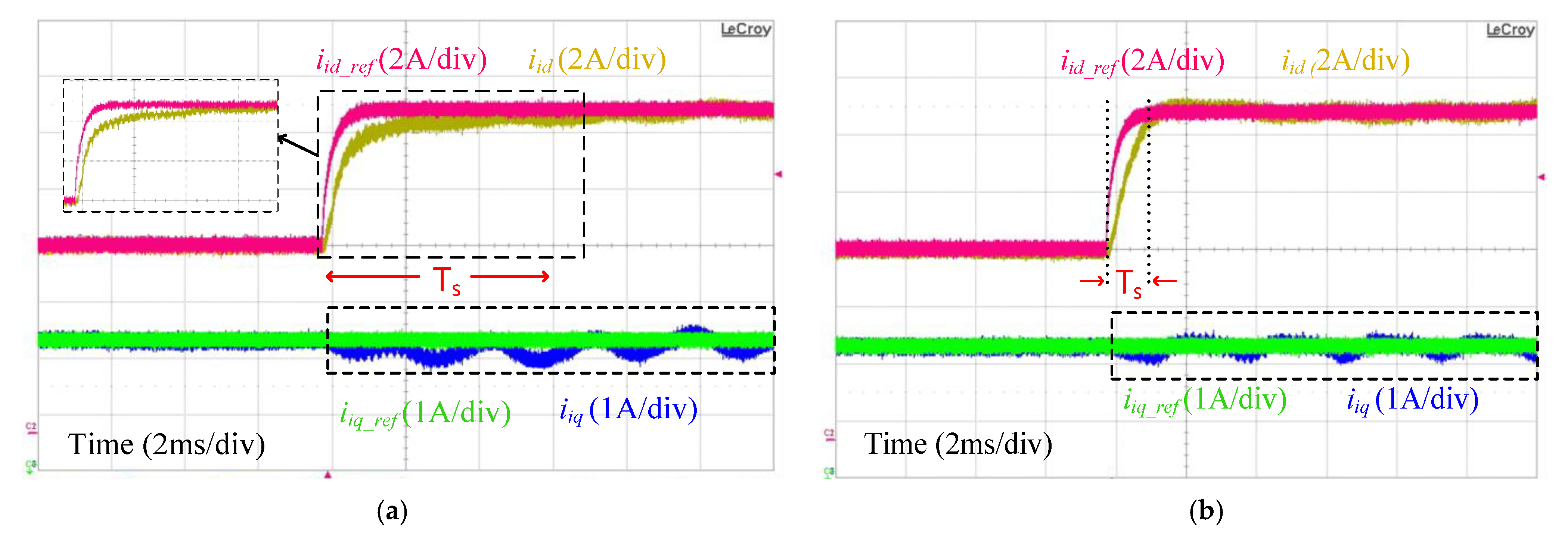
5.2. Performance Comparison with the LCL Filter Type GcI
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Blaabjerg, F. Control of Power Electronics Converters and Systems, 1st ed.; Academic Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Tang, W.; Ma, K.; Song, Y. Critical Damping Ratio to Ensure Design Efficiency and Stability of LCL Filters. IEEE Trans. Power Electron. 2020, 36, 315–325. [Google Scholar] [CrossRef]
- Dannehl, J.; Fuchs, F.W.; Hansen, S.; Thøgersen, P.B. Investigation of active damping approaches for PI based current control of a grid-connected pulse width modulation converters with LCL filters. IEEE Trans. Ind. Appl. 2010, 46, 1509–1517. [Google Scholar] [CrossRef]
- Dannehl, J.; Liserre, M.; Fuchs, F.W. Filter-based active damping of voltage source converters with LCL filter. IEEE Trans. Ind. Electron. 2011, 58, 3623–3633. [Google Scholar] [CrossRef]
- Yao, W.; Yang, Y.; Zhang, X.; Blaabjerg, F.; Loh, P.C. Design and analysis of robust active damping of LCL filters using digital notch filters. IEEE Trans. Power Electron. 2017, 32, 2360–2375. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Fang, J.; Tang, Y.; Wu, X.; Geng, Y. Capacitor-voltage feedforward with full delay compensation to improve weak grids adaptability of LCL-filtered grid-connected converters for distribution generation systems. IEEE Trans. Power Electron. 2018, 33, 749–764. [Google Scholar] [CrossRef]
- Bierhoff, M.; Soliman, R. Analysis and Design of Grid-Tied Inverter with LCL Filter. IEEE Open J. Power Electron. 2020, 1, 161–169. [Google Scholar] [CrossRef]
- Wang, J.; Yan, J.; Jiang, L.; Zou, J. Delay-dependent stability of single-loop controlled grid-connected inverters with LCL filters. IEEE Trans. Power Electron. 2016, 31, 743–757. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Wang, X.; Ruan, X.; Pan, D.; Qin, K. Hybrid Active Damping Combining Capacitor Current Feedback and Point of Common Coupling Voltage Feedforward for LCL-Type Grid-Connected Inverter. IEEE Trans. Power Electron. 2021, 36, 2373–2383. [Google Scholar] [CrossRef]
- Miskovic, V.; Klasko, V.; Jahns, T.M.; Smith, A.H.C.; Romenesko, C. Observer-based active damping of LCL resonance in grid-connected voltage source converters. IEEE Trans. Ind. Appl. 2014, 50, 3977–3985. [Google Scholar] [CrossRef]
- Sadabadi, M.S.; Haddadi, A.; Karimi, H.; Karimi, A. A robust active damping control strategy for LCL-based grid-connected DG unit. IEEE Trans. Ind. Electron. 2017, 64, 8055–8065. [Google Scholar] [CrossRef]
- Zhang, S.; Jiang, S.; Lu, X.; Ge, B.; Peng, F.Z. Resonance issues and damping techniques for grid-connected inverters with long transmission cable. IEEE Trans. Power Electron. 2014, 29, 110–120. [Google Scholar] [CrossRef]
- Kraemer, R.A.S.; Carati, E.G.; Cardoso, R.; da Costa, J.P.; Stein, C.M.O. Virtual State Damping for Resonance Suppression and Robustness Improvement in LCL-Type Distributed Generation Inverters. IEEE Trans. Energy Convers. 2021, 36, 1216–1225. [Google Scholar] [CrossRef]
- Awal, M.A.; della Flora, L.; Husain, I. Observer Based Generalized Active Damping for Voltage Source Converters with LCL Filters. IEEE Trans. Power Electron. 2021. [Google Scholar] [CrossRef]
- Liu, J.; Wu, W.; Chung, H.S.-H.; Blaabjerg, F. Disturbance Observer-Based Adaptive Current Control With Self-Learning Ability to Improve the Grid-Injected Current for $LCL$ -Filtered Grid-Connected Inverter. IEEE Access 2019, 7, 105376–105390. [Google Scholar] [CrossRef]
- Al-Durra, A.; Errouissi, R. Robust Feedback-Linearization Technique for Grid-Tied LCL Filter Systems Using Disturbance Estimation. IEEE Trans. Ind. Appl. 2019, 55, 3185–3197. [Google Scholar] [CrossRef]
- Su, M.; Cheng, B.; Sun, Y.; Tang, Z.; Guo, B.; Yang, Y.; Blaabjerg, F.; Wang, H. Single-Sensor Control of LCL-Filtered Grid-Connected Inverters. IEEE Access 2019, 7, 38481–38494. [Google Scholar] [CrossRef]
- Tran, T.V.; Kim, K. Frequency Adaptive Grid Voltage Sensorless Control of LCL-Filtered Inverter Based on Extended Model Observer. IEEE Trans. Ind. Electron. 2020, 67, 7560–7573. [Google Scholar] [CrossRef]
- Gao, N.; Lin, X.; Wu, W.; Blaabjerg, F. Grid Current Feedback Active Damping Control Based on Disturbance Observer for Battery Energy Storage Power Conversion System with LCL Filter. Energies 2021, 14, 1482. [Google Scholar] [CrossRef]
- Cao, Y.; Zhao, Q.; Ye, Y.; Xiong, Y. ADRC-Based Current Control for Grid-Tied Inverters: Design, Analysis, and Verification. IEEE Trans. Ind. Electron. 2020, 67, 8428–8437. [Google Scholar] [CrossRef]
- Chen, W.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef] [Green Version]
- Saleem, M.; Choi, K.-Y.; Kim, R.-Y. Resonance damping for an LCL filter type grid-connected inverter with active disturbance rejection control under grid impedance uncertainty. Int. J. Electr. Power Energy Syst. 2019, 109, 444–454. [Google Scholar] [CrossRef]
- Saleem, M.; Ko, B.-S.; Kim, S.-H.; Kim, S.-I.; Chowdhry, B.S.; Kim, R.-Y. Active Disturbance Rejection Control Scheme for Reducing Mutual Current and Harmonics in Multi-Parallel Grid-Connected Inverters. Energies 2019, 12, 4363. [Google Scholar] [CrossRef] [Green Version]
- Tran, T.V.; Kim, K.-H.; Lai, J.-S. Optimized Active Disturbance Rejection Control With Resonant Extended State Observer for Grid Voltage Sensorless LCL-Filtered Inverter. IEEE Trans. Power Electron. 2021, 36, 13317–13331. [Google Scholar] [CrossRef]
- Ma, W.; Guan, Y.; Zhang, B.; Wu, L. Active Disturbance Rejection Control Based Single Current Feedback Resonance Damping Strategy for LCL-Type Grid-Connected Inverter. IEEE Trans. Energy Convers. 2021, 36, 48–62. [Google Scholar] [CrossRef]
- Fu, C.; Tan, W. Parameters Tuning of Reduced-Order Active Disturbance Rejection Control. IEEE Access 2020, 8, 72528–72536. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Workman, M.L. Digital Control of Dynamic Systems, 3rd ed.; Addison-Wesley: Reading, MA, USA, 1997. [Google Scholar]
- Dannehl, J.; Wessels, C.; Fuchs, F.W. Limitations of voltage-oriented PI current control of grid connected PWM rectifiers with LCL filters. IEEE Trans. Ind. Electron. 2008, 56, 380–388. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Symbol | Parameter | Value | p. u. Values |
|---|---|---|---|---|
| Grid | Line-to-line voltage | |||
| Nominal power | ||||
| Base frequency | ||||
| Grid impedance | 0–4.8% | |||
| Switching frequency | ||||
| DC-link voltage | ||||
| L filter | Inductor | 24.4% | ||
| Equivalent resistance of | ||||
| LCL filter | Inverter side inductor | 2.4% | ||
| Grid side inductor | 2.4% | |||
| Equivalent resistance of | ||||
| Equivalent resistance of | ||||
| Filter capacitor | 1.1% | |||
| Controller | Control bandwidth | |||
| Observer bandwidth | ||||
| Sampling frequency |
| Grid Impedance (mH) | Bandwidth | Gain Margin GM (dB) | Phase Margin PM (°) |
|---|---|---|---|
| 0 | 1000 | 16.1 | 76.5 |
| 1 | 953 | 16.5 | 77.1 |
| 2 | 910 | 16.9 | 77.7 |
| 3 | 870 | 17.3 | 78.2 |
| 4 | 834 | 17.7 | 78.7 |
| Grid Impedance (mH) | Resonance Frequency (kHz) | Bandwidth | Gain Margin GM (dB) | Phase Margin PM (°) |
|---|---|---|---|---|
| 0 | 5.03 | 970 | 6.03 | 14.7 |
| 1 | 4.59 | 768 | 6.6 | 18.7 |
| 2 | 4.35 | 643 | 6.84 | 20.8 |
| 3 | 4.21 | 550 | 6.96 | 22.1 |
| 4 | 4.11 | 478 | 7.04 | 22.9 |
| Grid Impedance (mH) | Bandwidth (Hz) | Gain Margin GM (dB) | Phase Margin PM (°) |
|---|---|---|---|
| 0 | 997 | 14.4 | 81.8 |
| 1 | 990 | 15 | 80.6 |
| 2 | 983 | 15.4 | 79.3 |
| 3 | 975 | 15.9 | 78.2 |
| 4 | 968 | 16.4 | 77 |
| Grid Impedance (mH) | Resonance Frequency (kHz) | Bandwidth | Gain Margin GM (dB) | Phase Margin PM (°) |
|---|---|---|---|---|
| 0 | 5.03 | 1000 | 3.31 | 89.5 |
| 1 | 4.59 | 989 | 3.39 | 85.3 |
| 2 | 4.35 | 969 | 3.42 | 81.2 |
| 3 | 4.21 | 945 | 3.44 | 77.3 |
| 4 | 4.11 | 918 | 3.45 | 73.6 |
| Grid Impedance | Bandwidth | Gain Margin GM (dB) | Phase Margin PM (°) |
|---|---|---|---|
| 0 | 1000 | 16.1 | 76.5 |
| 1 | 996 | 16.3 | 75.9 |
| 2 | 993 | 16.5 | 75.3 |
| 3 | 990 | 16.7 | 74.7 |
| 4 | 987 | 16.9 | 74.1 |
| Grid Impedance | Resonance Frequency | Bandwidth | Gain Margin GM (dB) | Phase Margin PM (°) |
|---|---|---|---|---|
| 0 | 5.03 | 1000 | 10.4 | 87.4 |
| 1 | 4.59 | 1000 | 10.4 | 86.5 |
| 2 | 4.35 | 1000 | 10.4 | 85.6 |
| 3 | 4.21 | 999 | 10.4 | 84.6 |
| 4 | 4.11 | 997 | 10.4 | 83.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saleem, M.; Ahmed Khan Khushik, M.H.; Tahir, H.; Kim, R.-Y. Robust L Approximation of an LCL Filter Type Grid-Connected Inverter Using Active Disturbance Rejection Control under Grid Impedance Uncertainty. Energies 2021, 14, 5276. https://doi.org/10.3390/en14175276
Saleem M, Ahmed Khan Khushik MH, Tahir H, Kim R-Y. Robust L Approximation of an LCL Filter Type Grid-Connected Inverter Using Active Disturbance Rejection Control under Grid Impedance Uncertainty. Energies. 2021; 14(17):5276. https://doi.org/10.3390/en14175276
Chicago/Turabian StyleSaleem, Muhammad, Muhammad Hanif Ahmed Khan Khushik, Hira Tahir, and Rae-Young Kim. 2021. "Robust L Approximation of an LCL Filter Type Grid-Connected Inverter Using Active Disturbance Rejection Control under Grid Impedance Uncertainty" Energies 14, no. 17: 5276. https://doi.org/10.3390/en14175276
APA StyleSaleem, M., Ahmed Khan Khushik, M. H., Tahir, H., & Kim, R.-Y. (2021). Robust L Approximation of an LCL Filter Type Grid-Connected Inverter Using Active Disturbance Rejection Control under Grid Impedance Uncertainty. Energies, 14(17), 5276. https://doi.org/10.3390/en14175276