
A Coordinated Optimal Strategy for Voltage and Reactive Power Control with Adaptive Amplitude Limiter Based on Flexible Excitation System

 , ,
, ,
Abstract
:1. Introduction
2. Mathematical Model
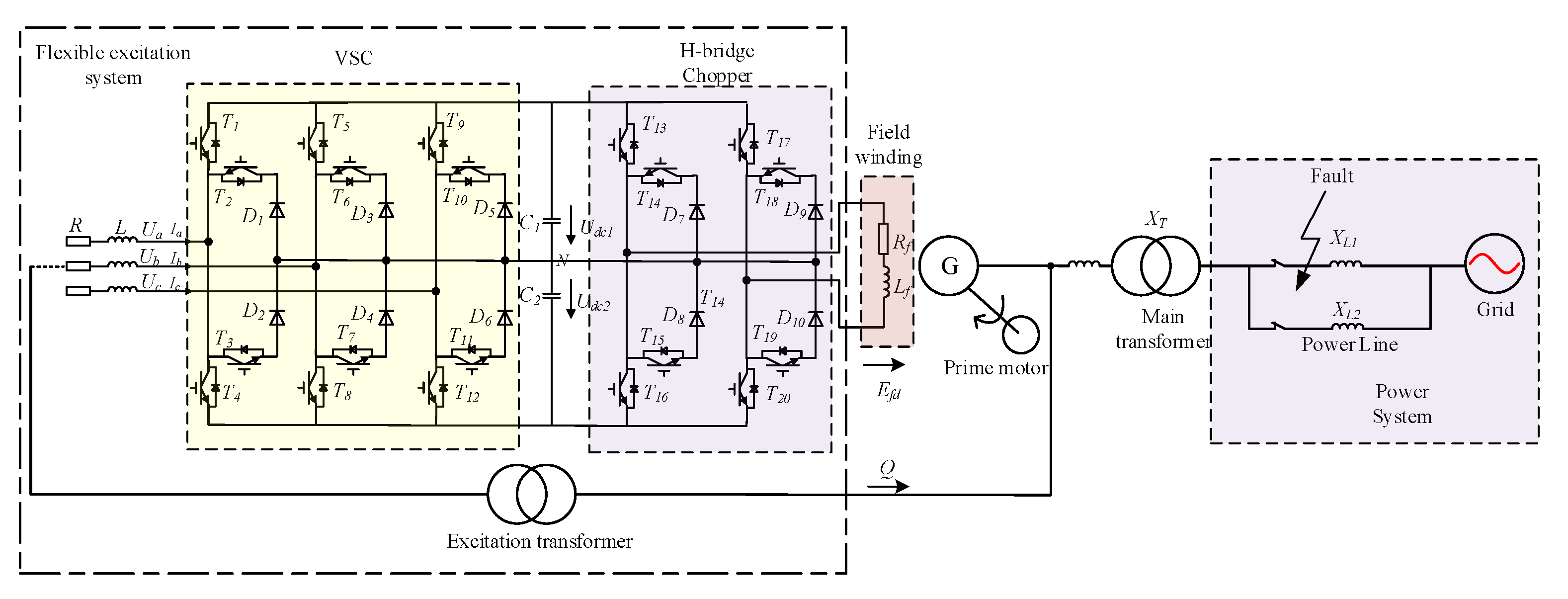
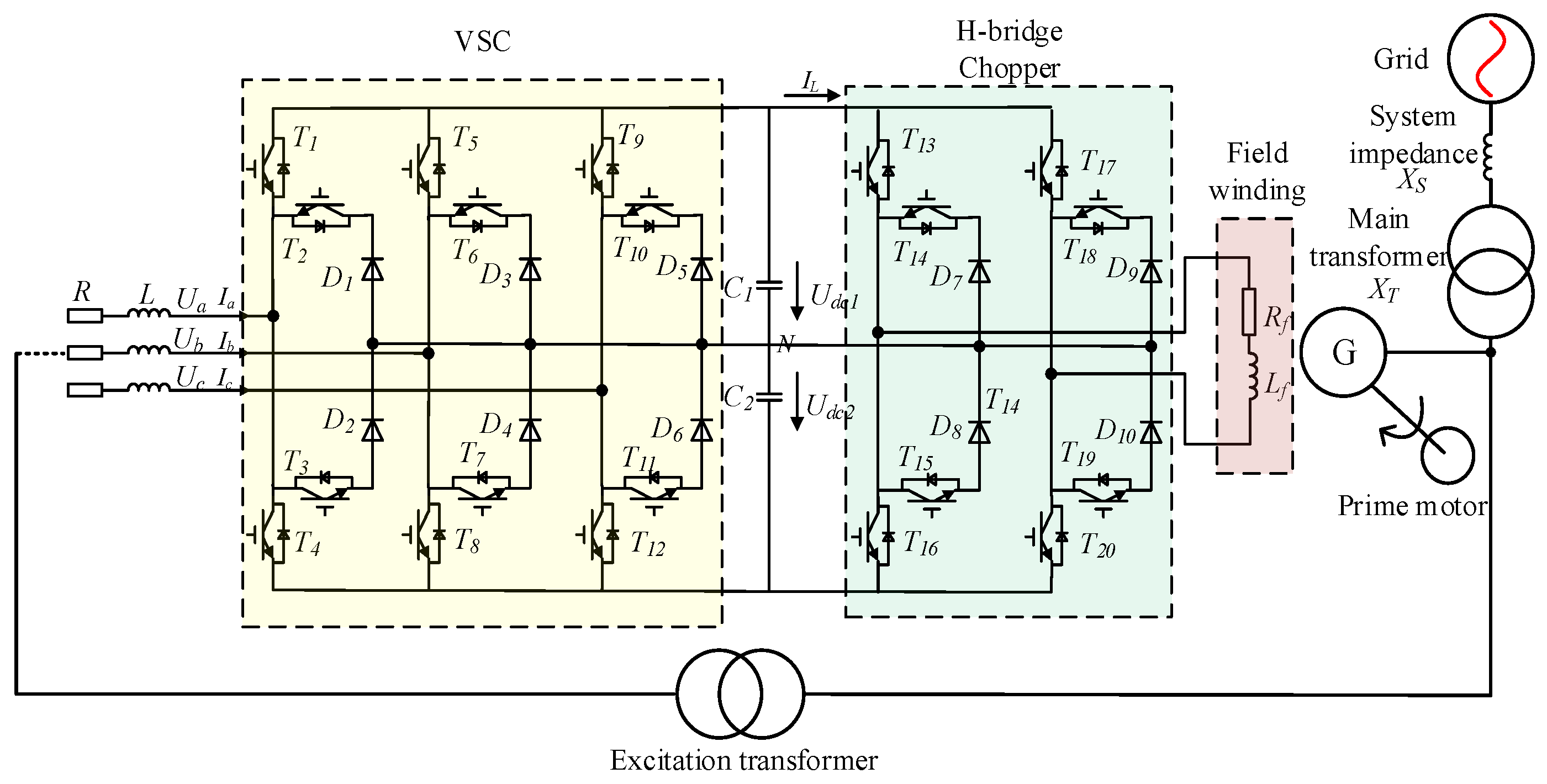
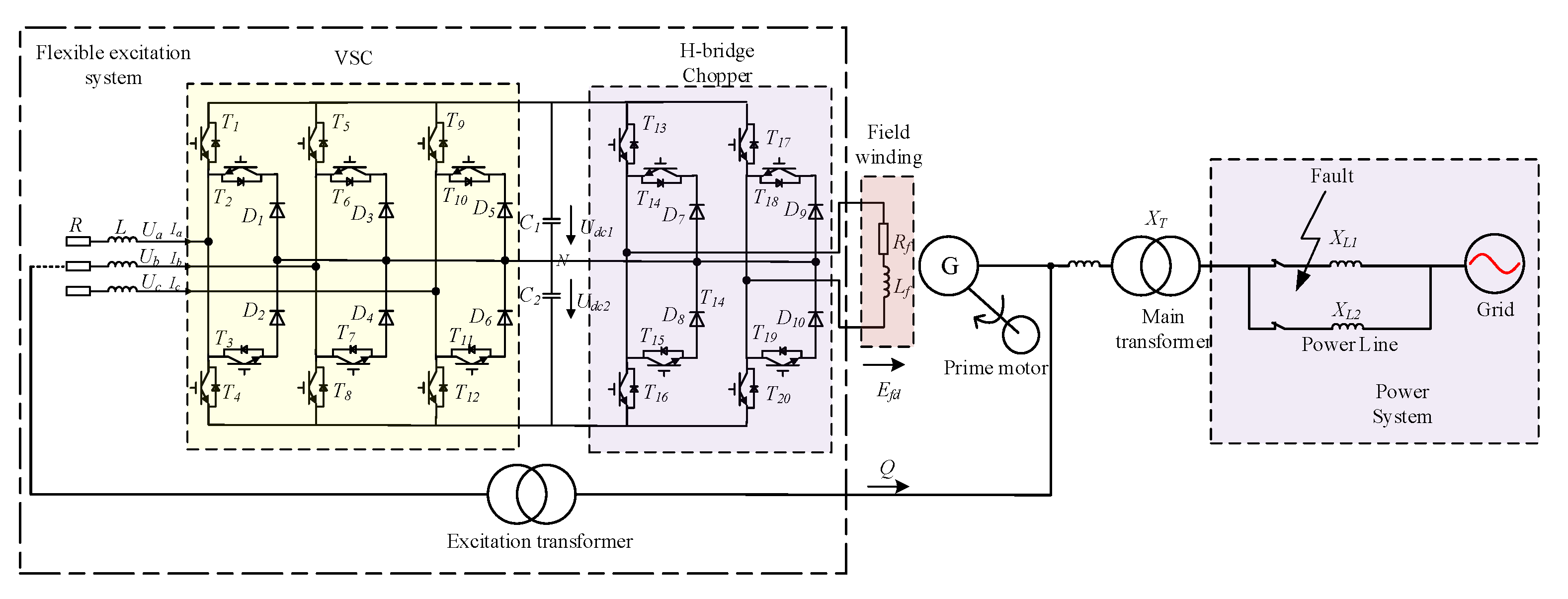
2.1. Mathematical Model of FES
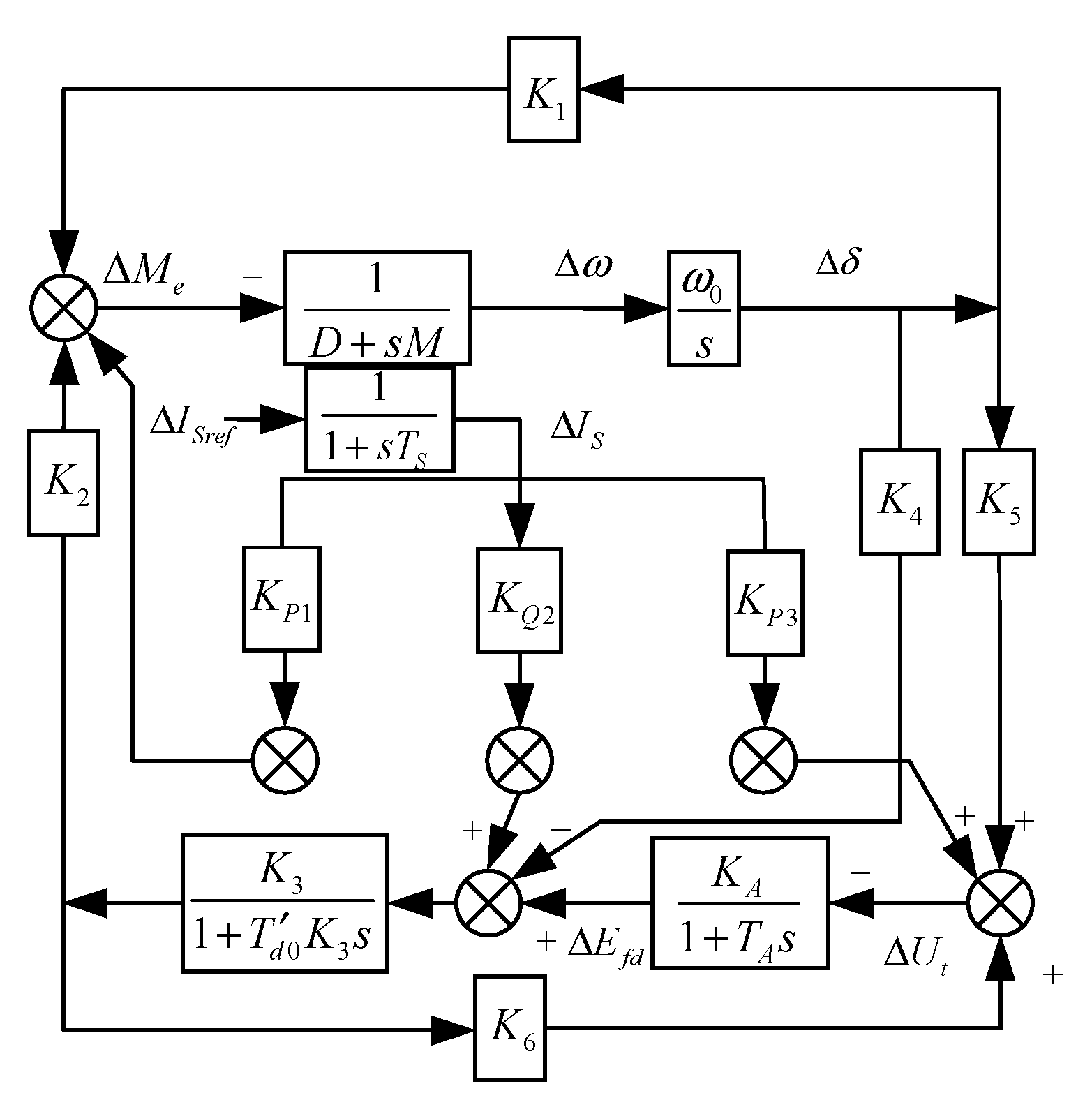
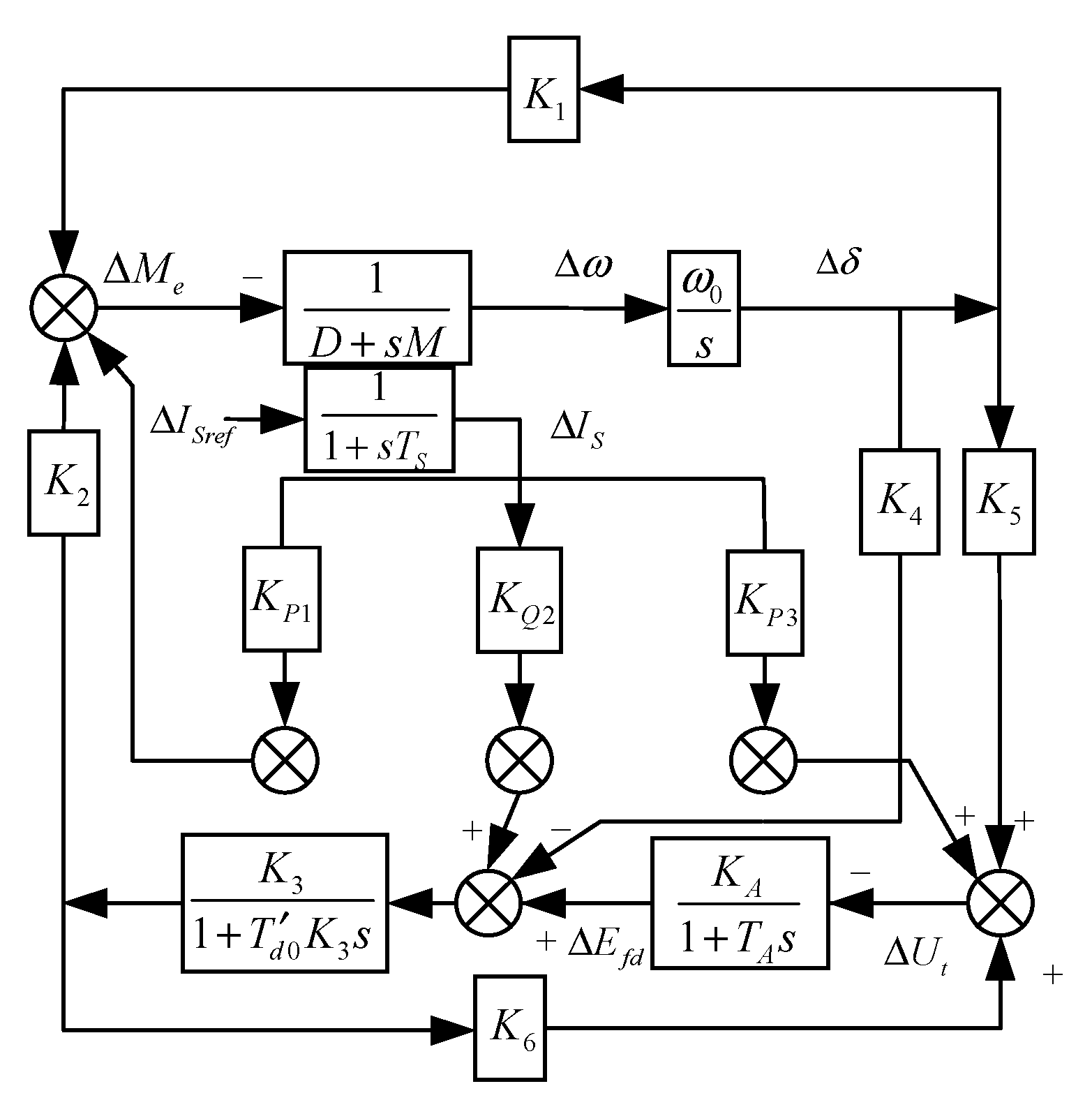
2.2. Mathematical Model of LOEC Control
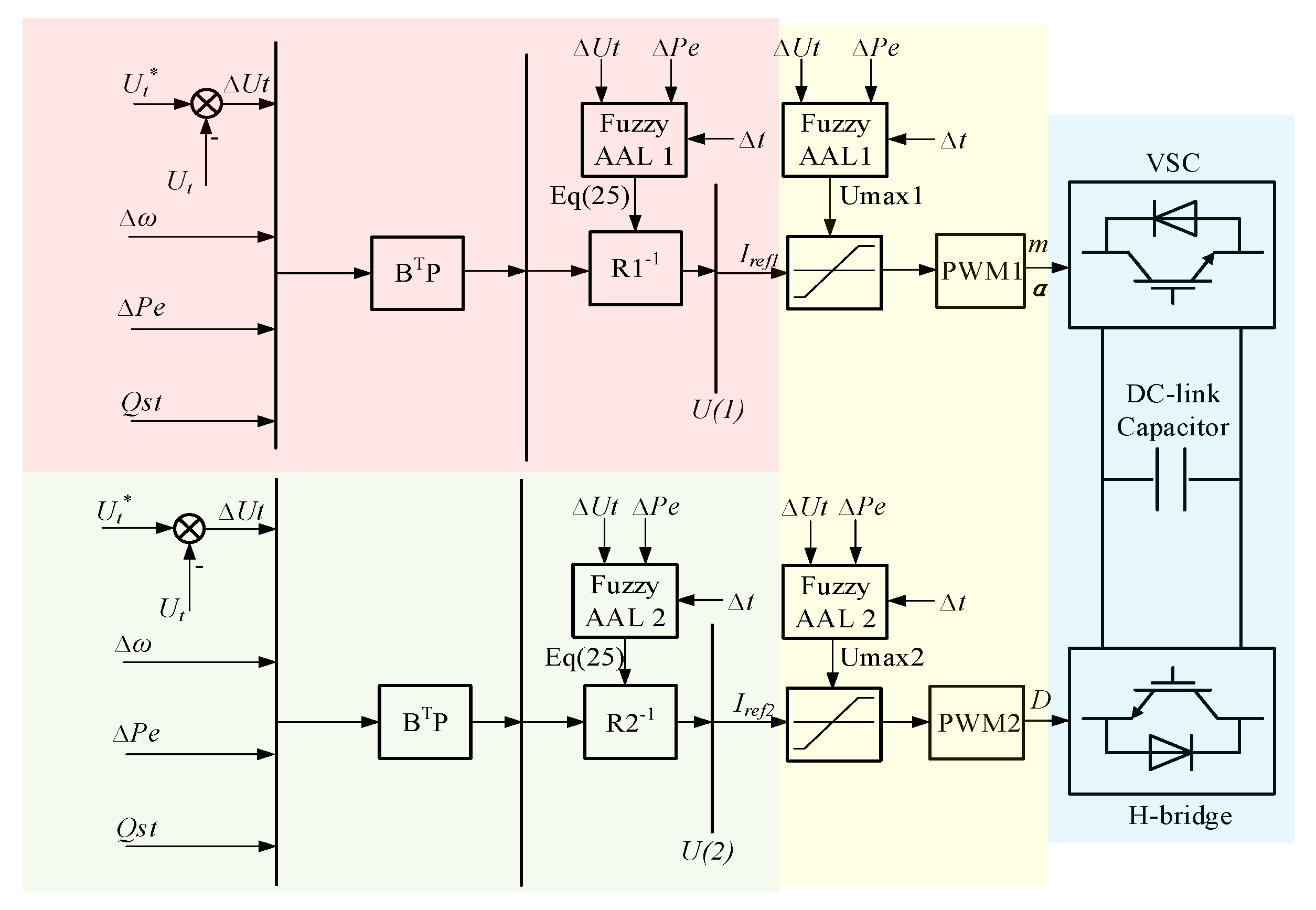
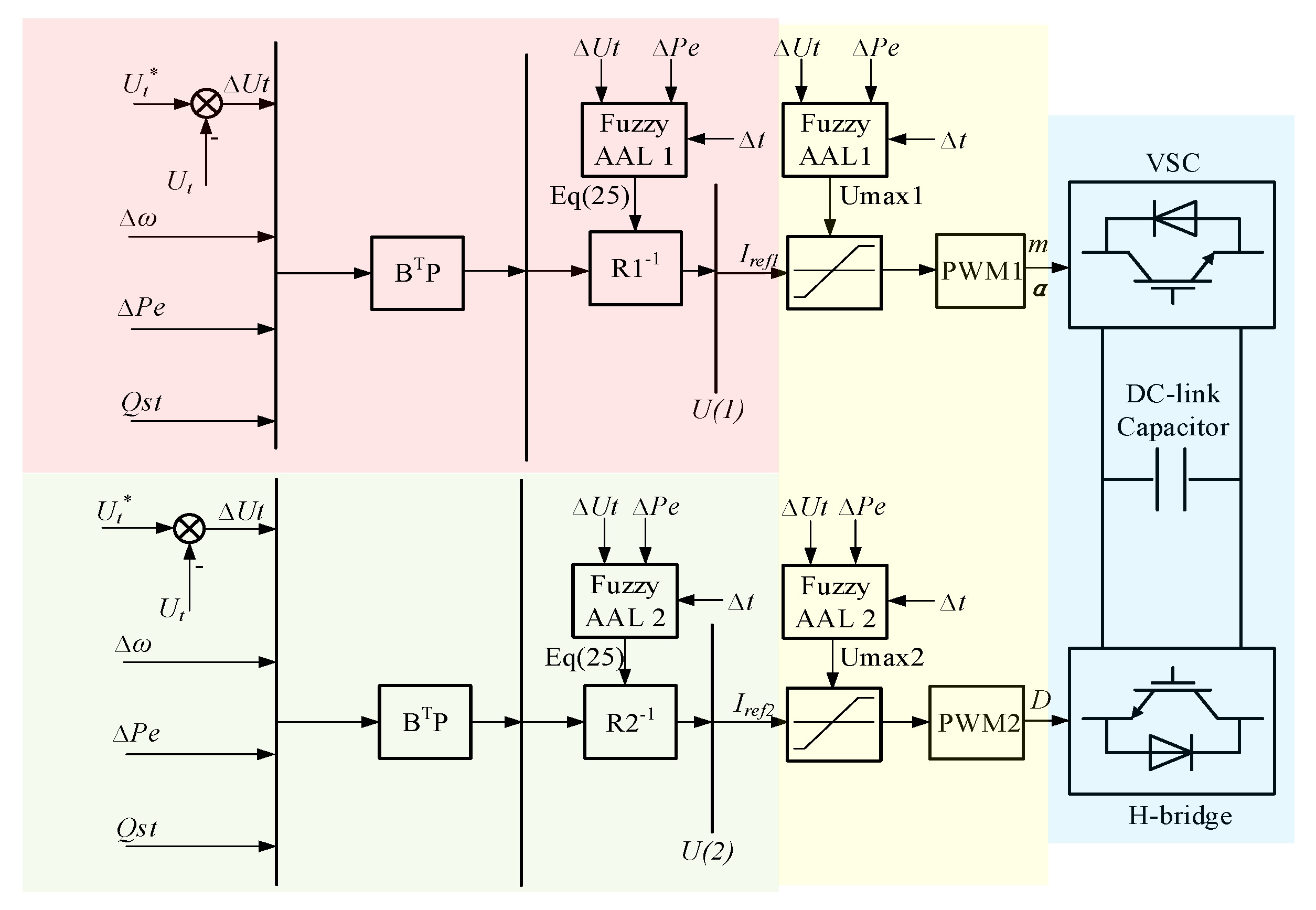
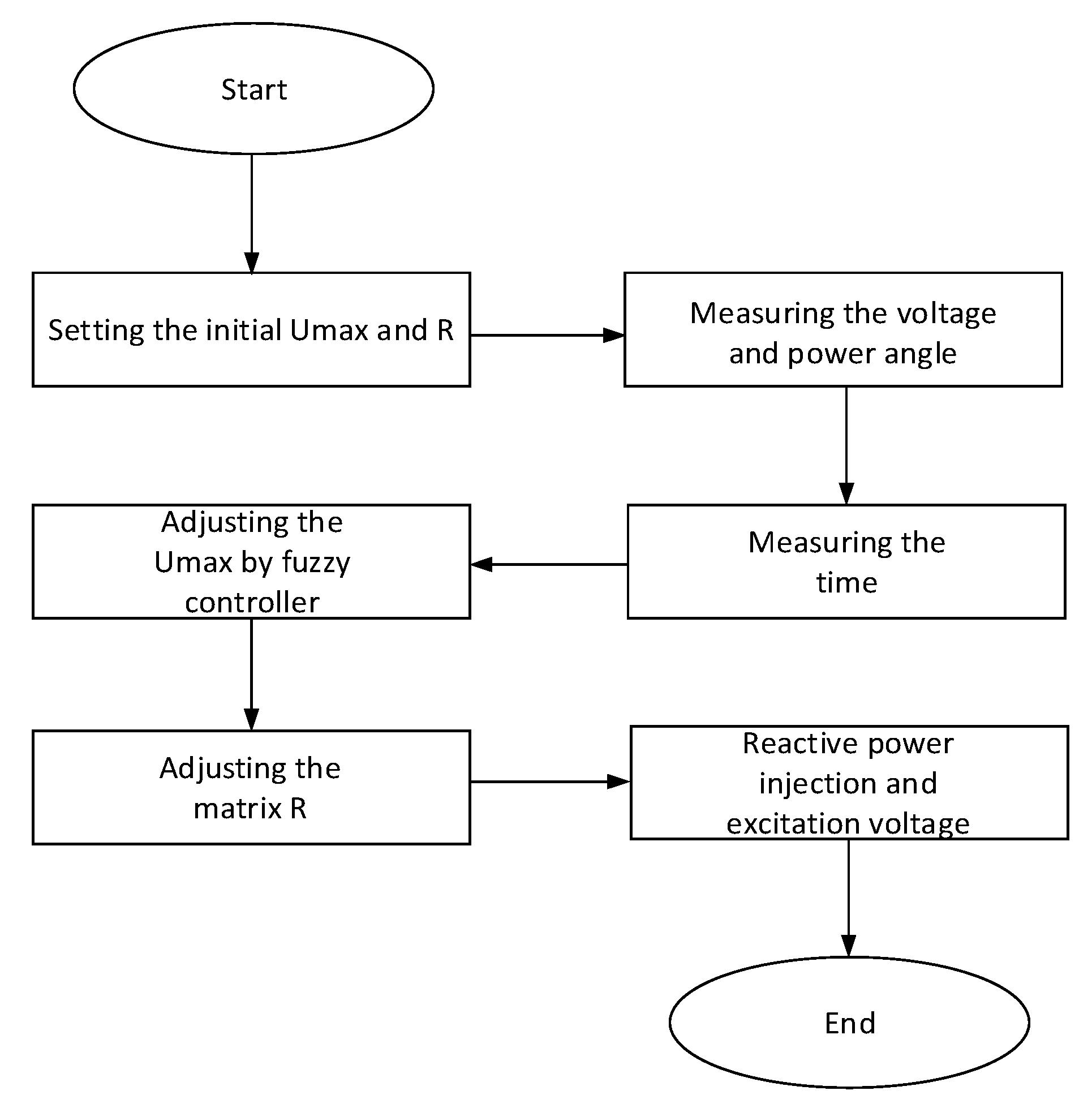
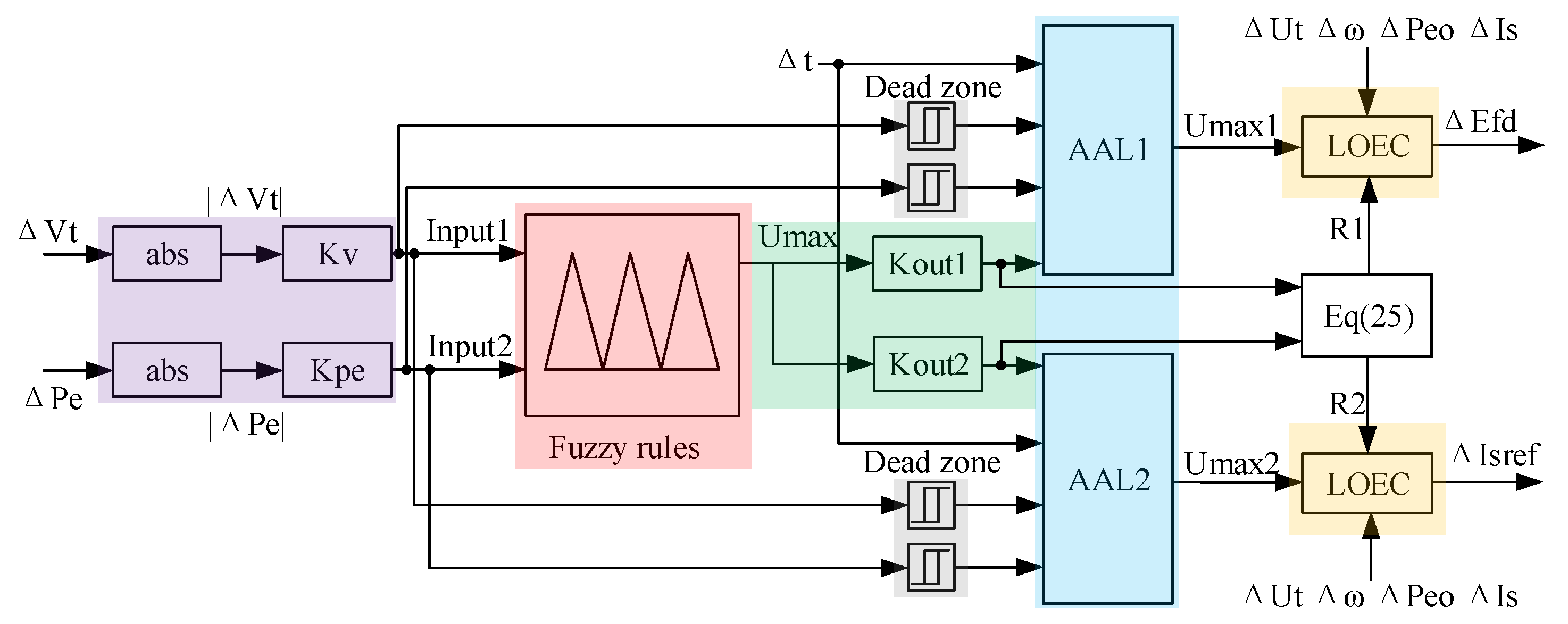
3. The Adaptive LOEC with Amplitude Limiter
3.1. The Adaptive LOEC
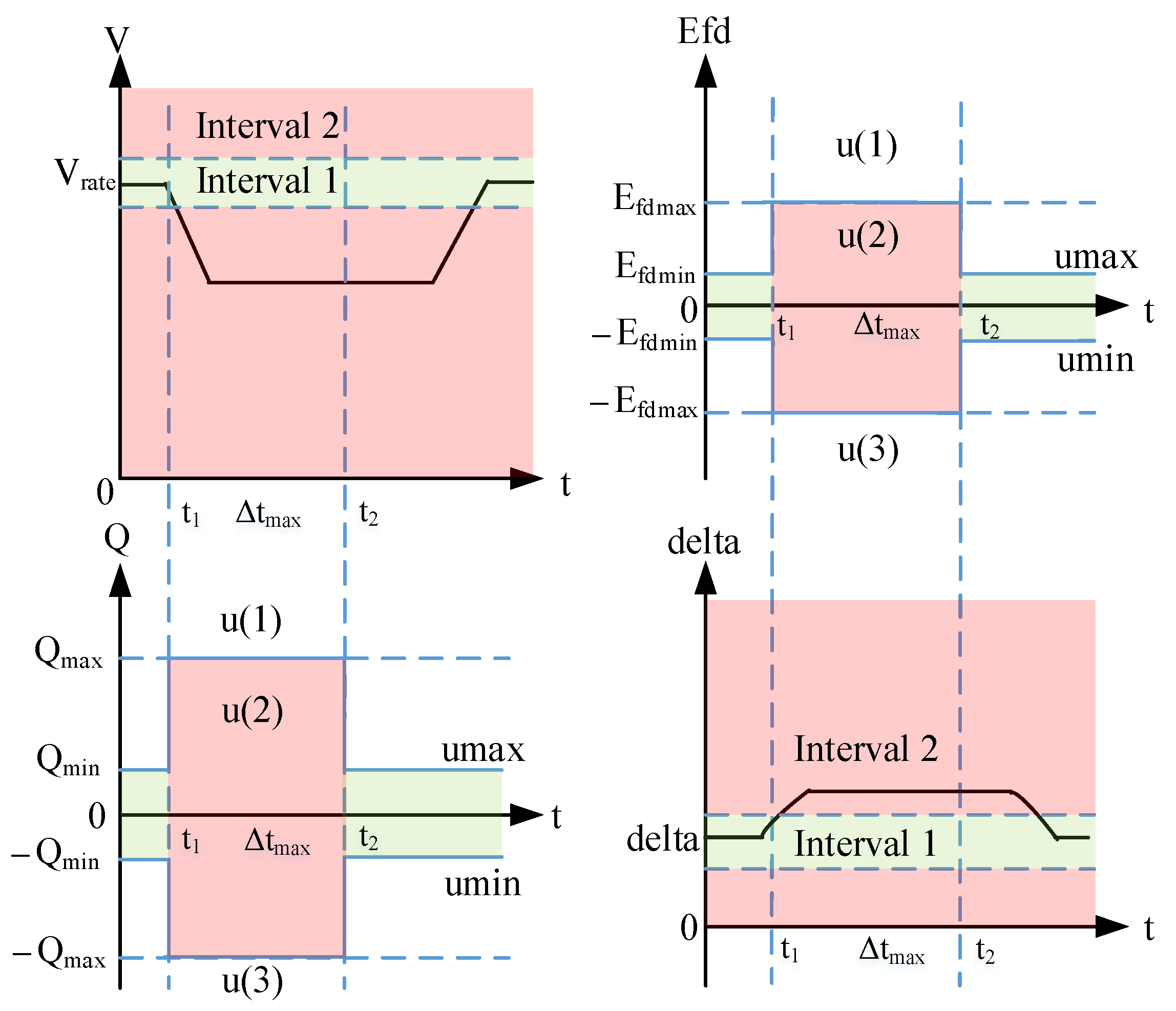
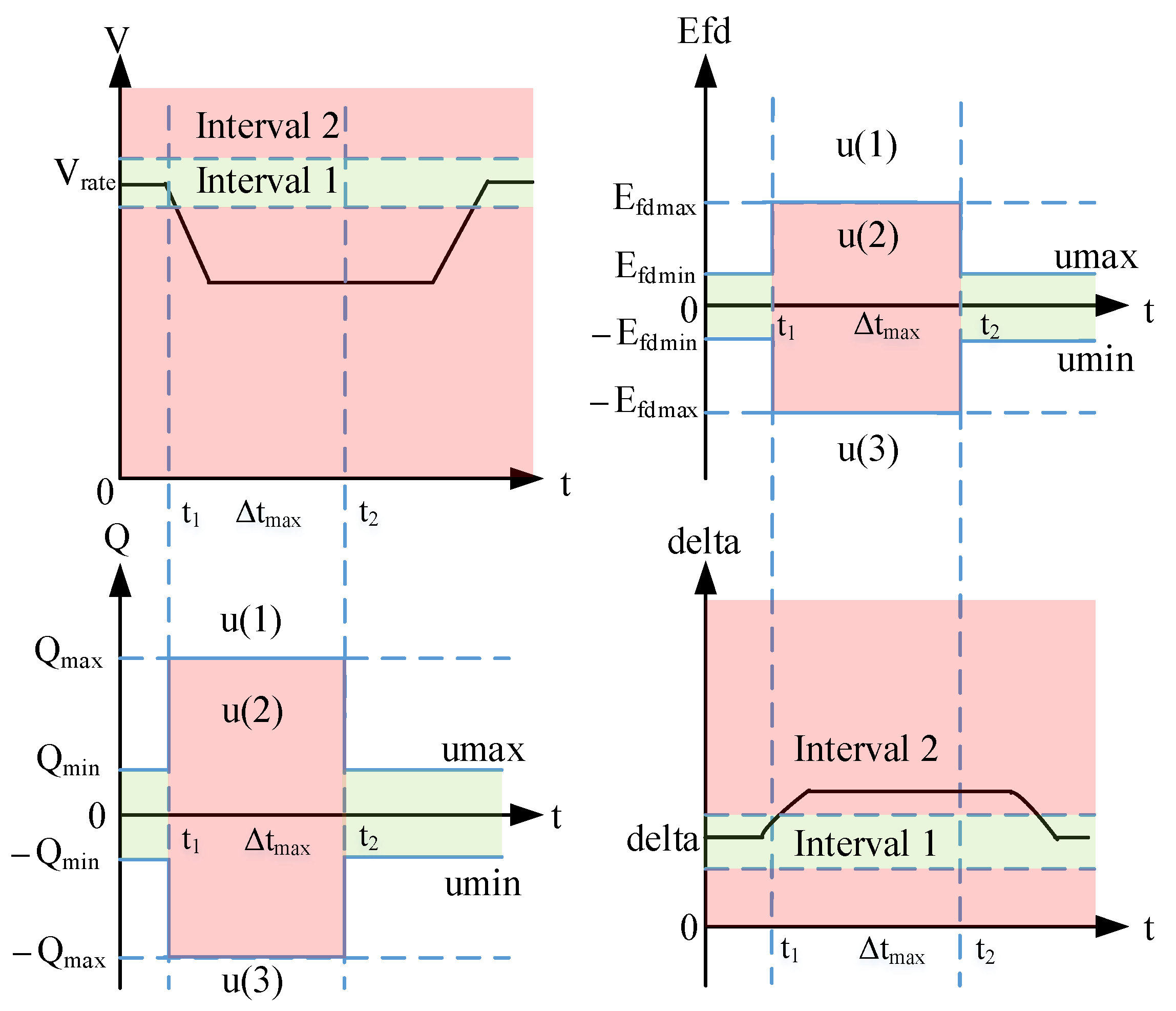
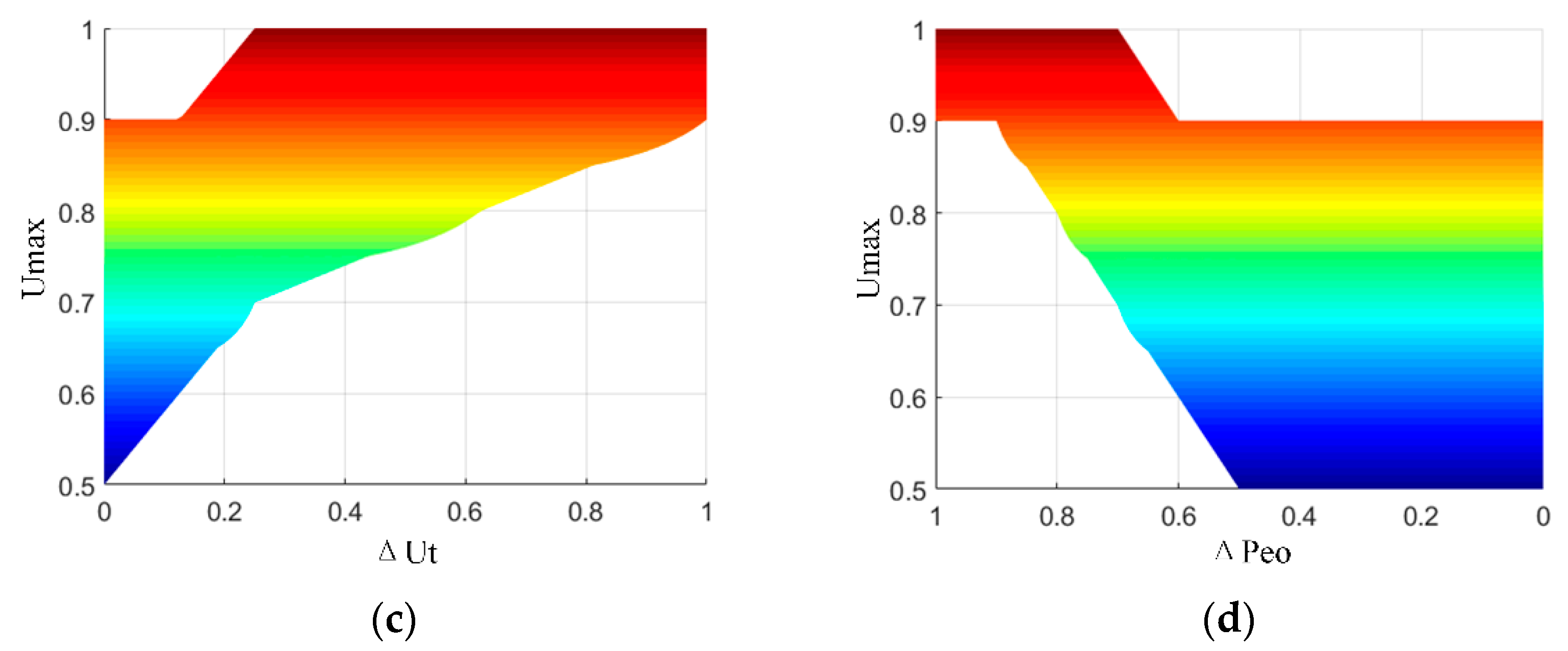
3.2. The Amplitude Limiter
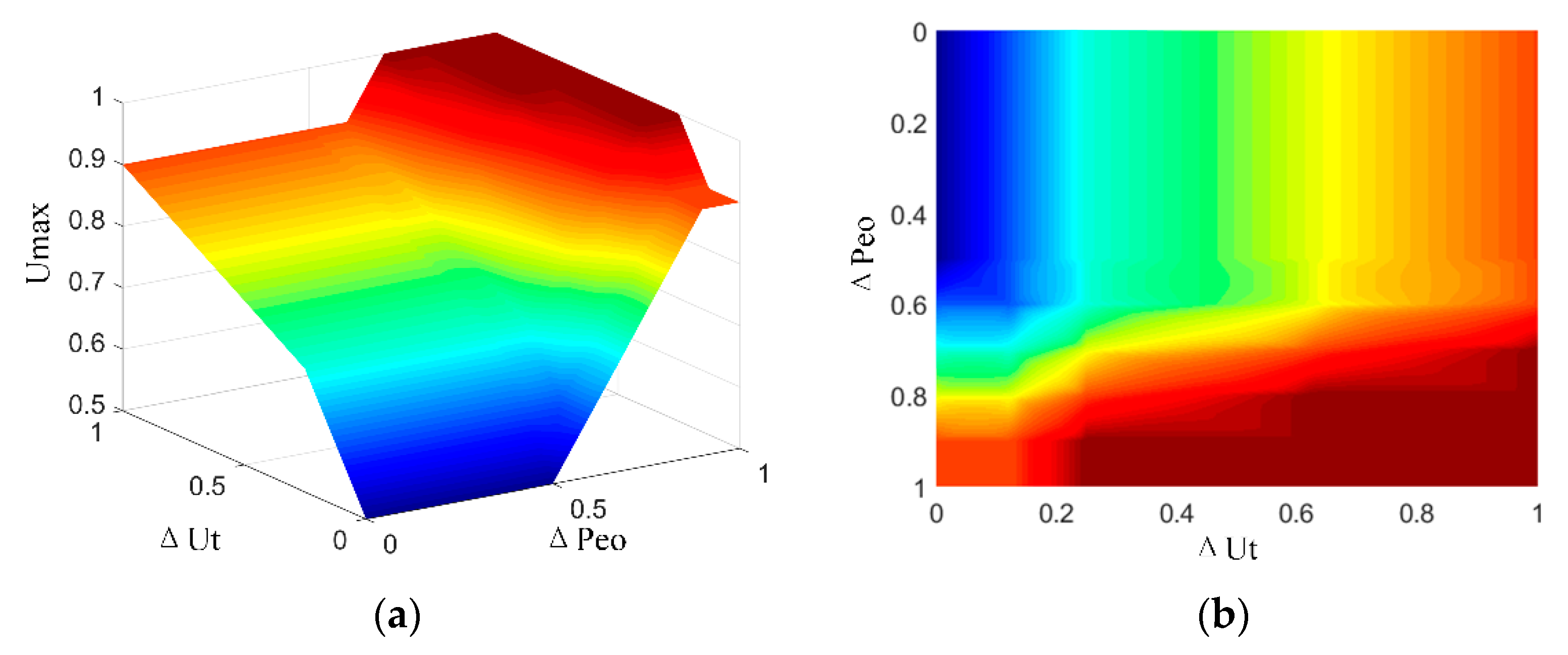
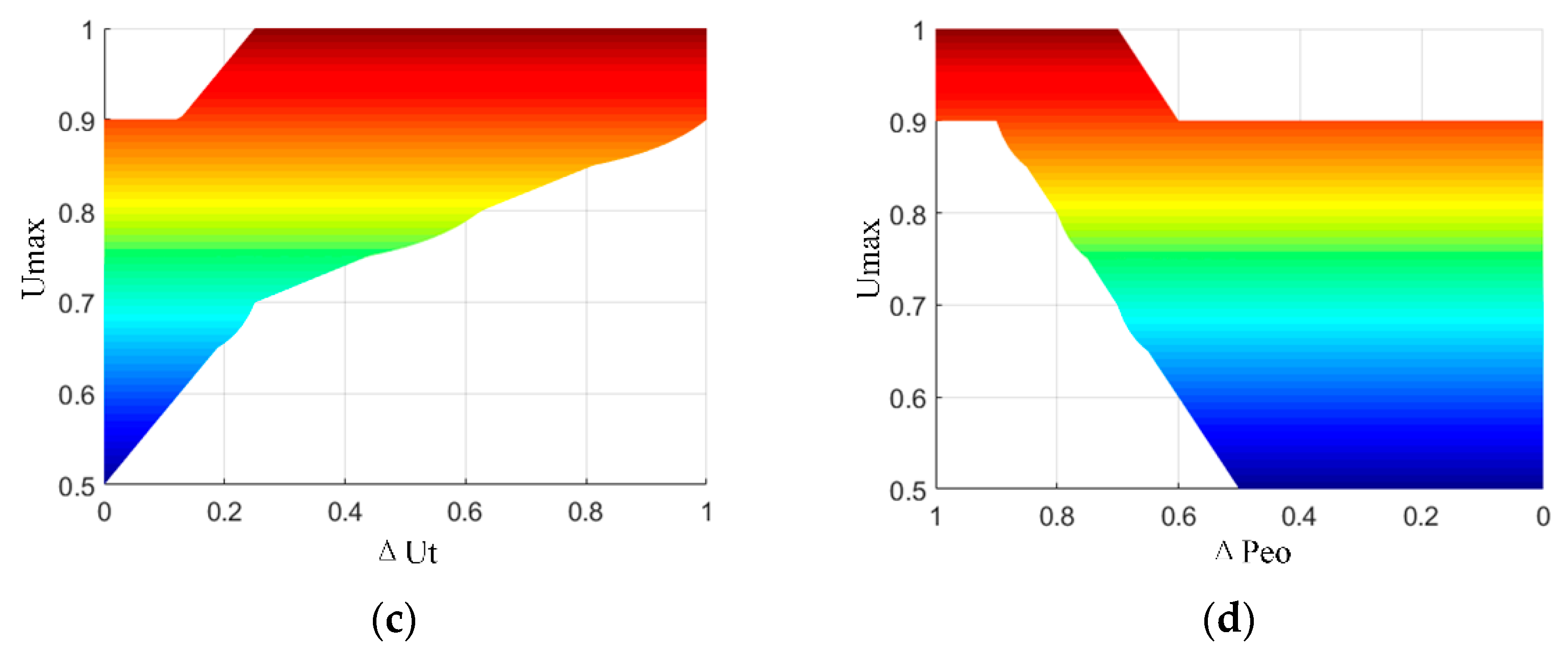
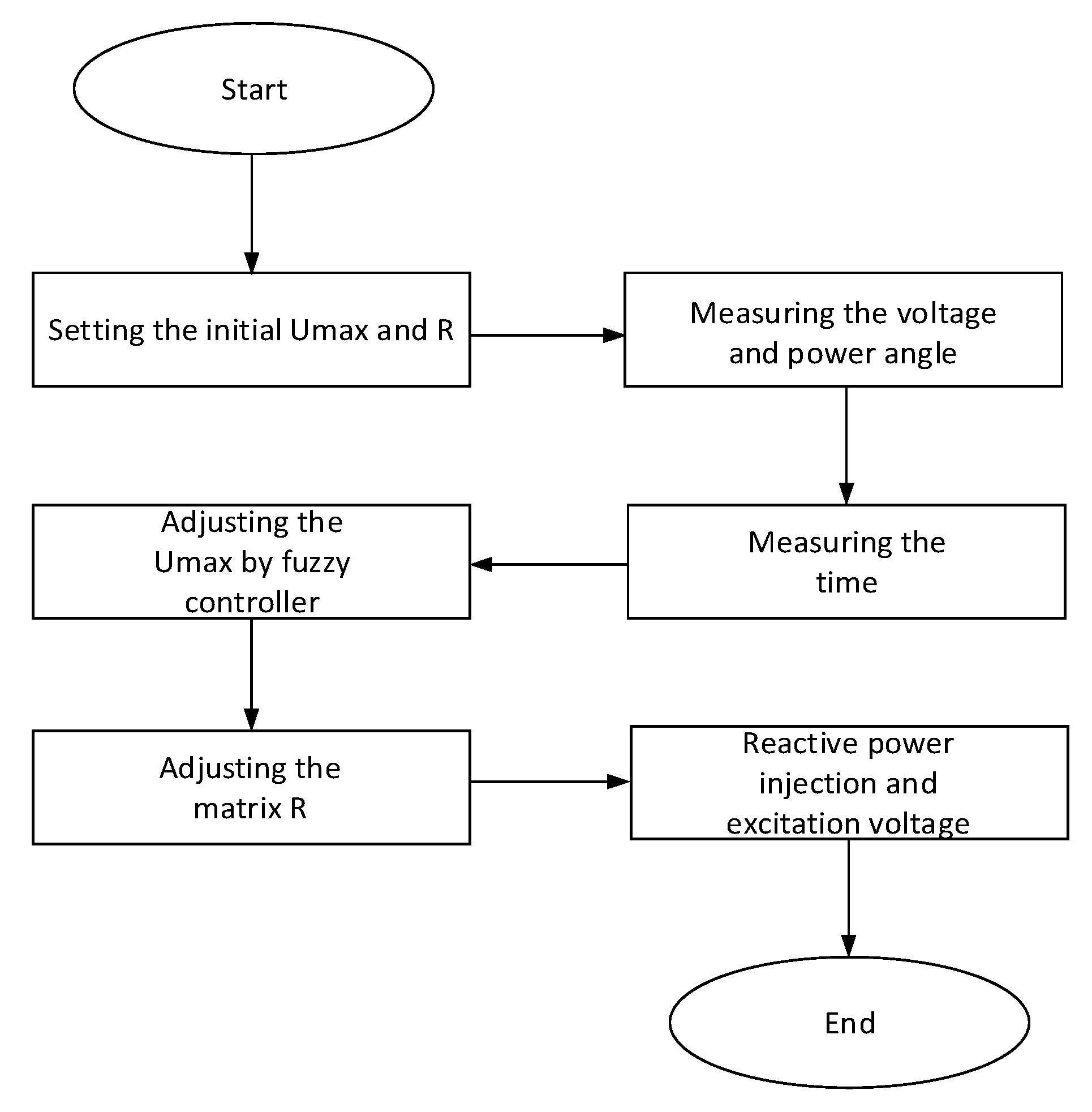
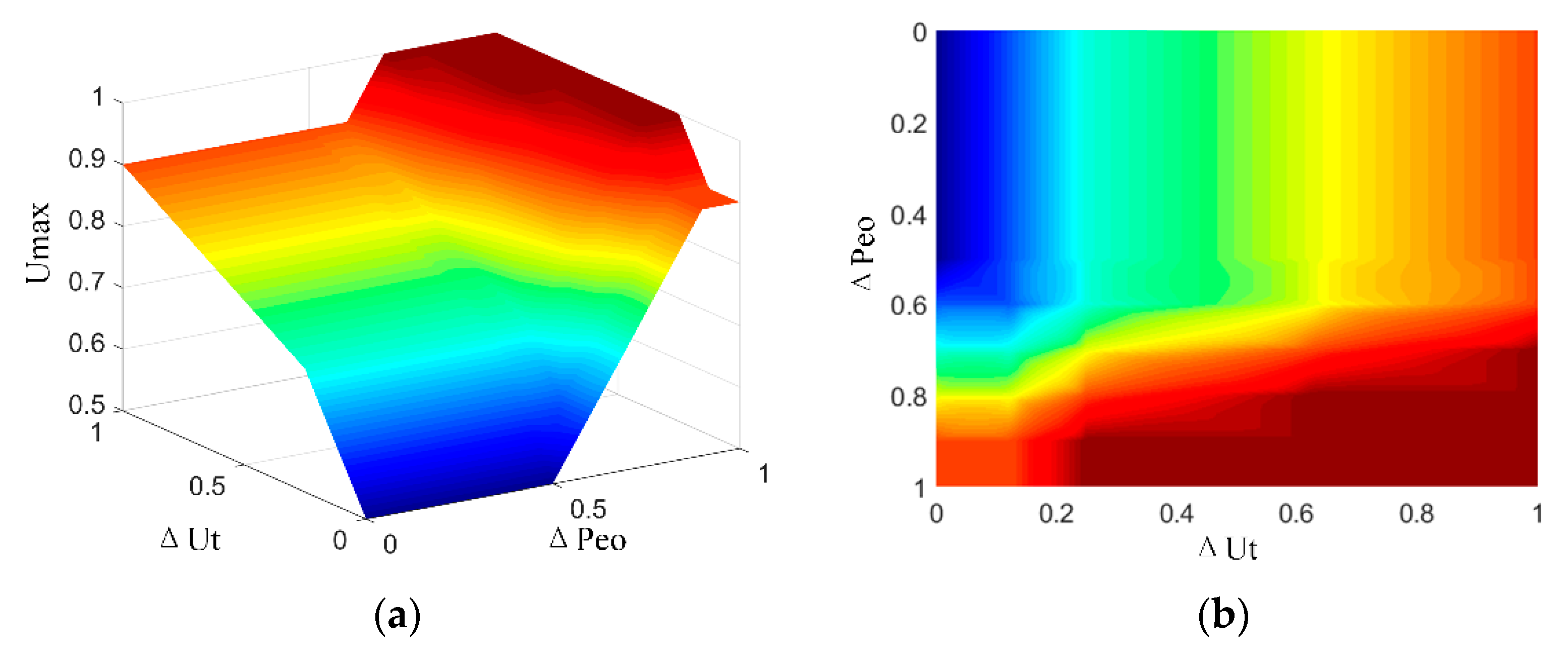
3.3. The Fuzzy Controller
4. Simulation Verification
4.1. The Simulation Platform
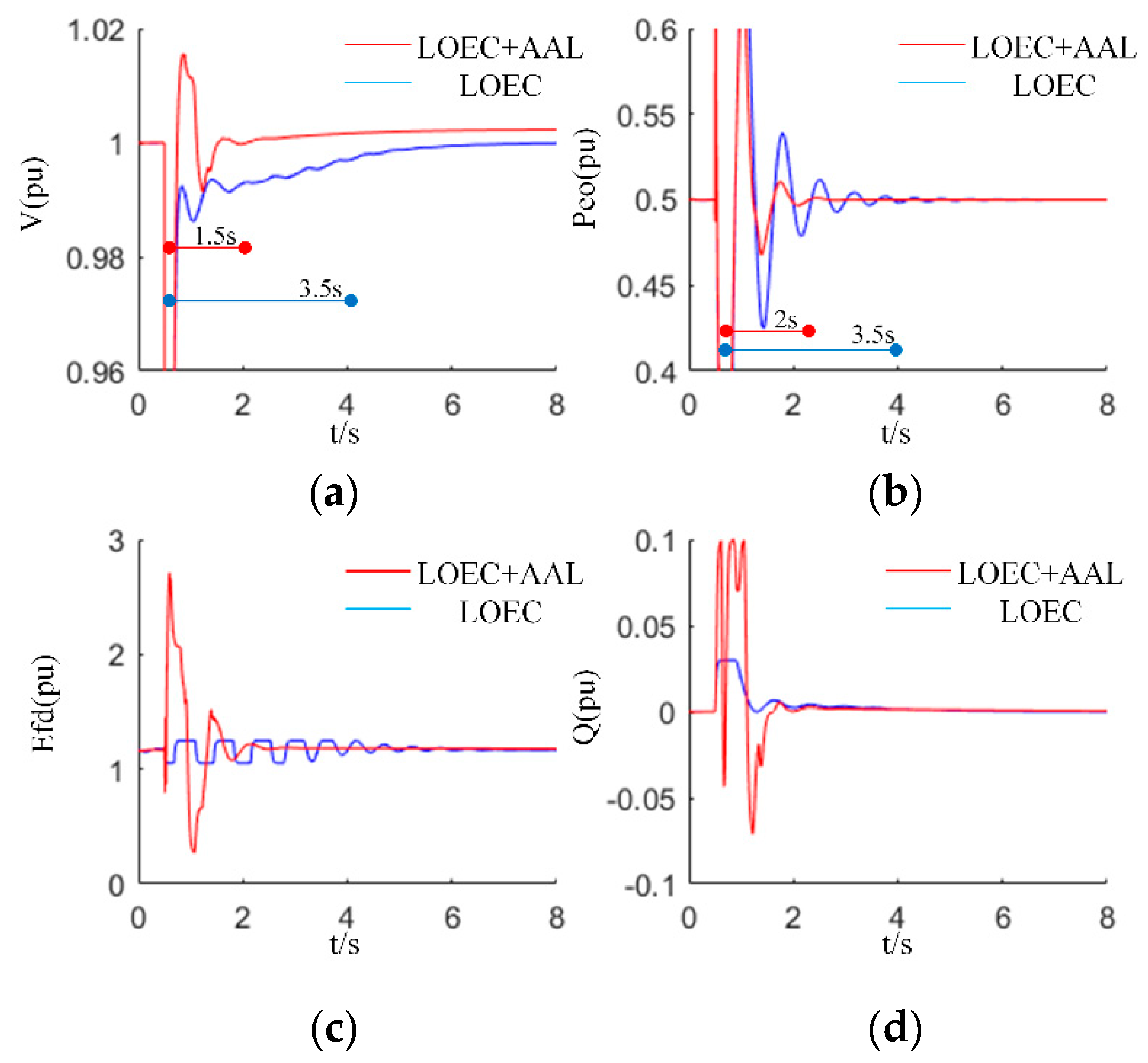
4.2. The Simulation Results
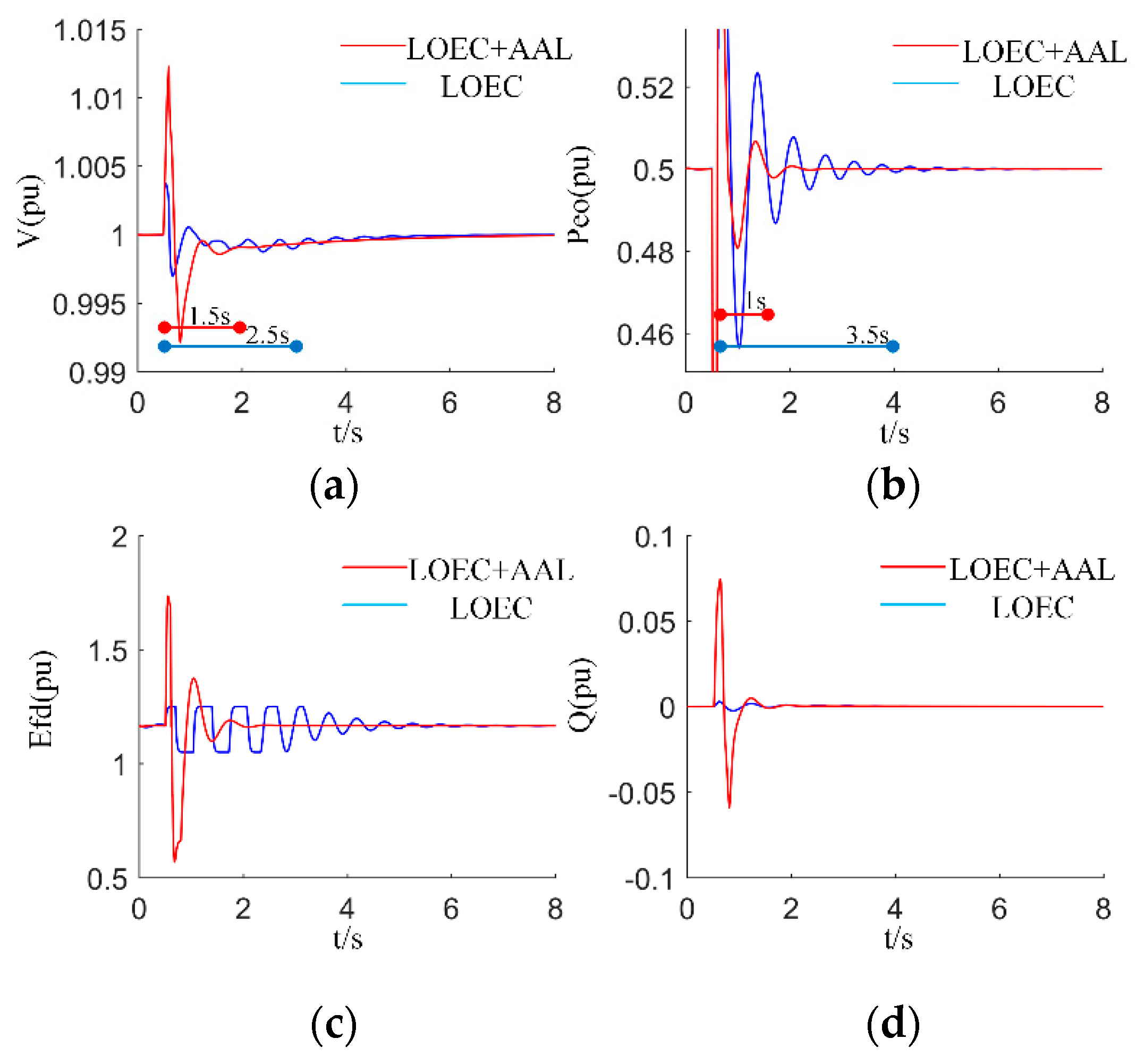
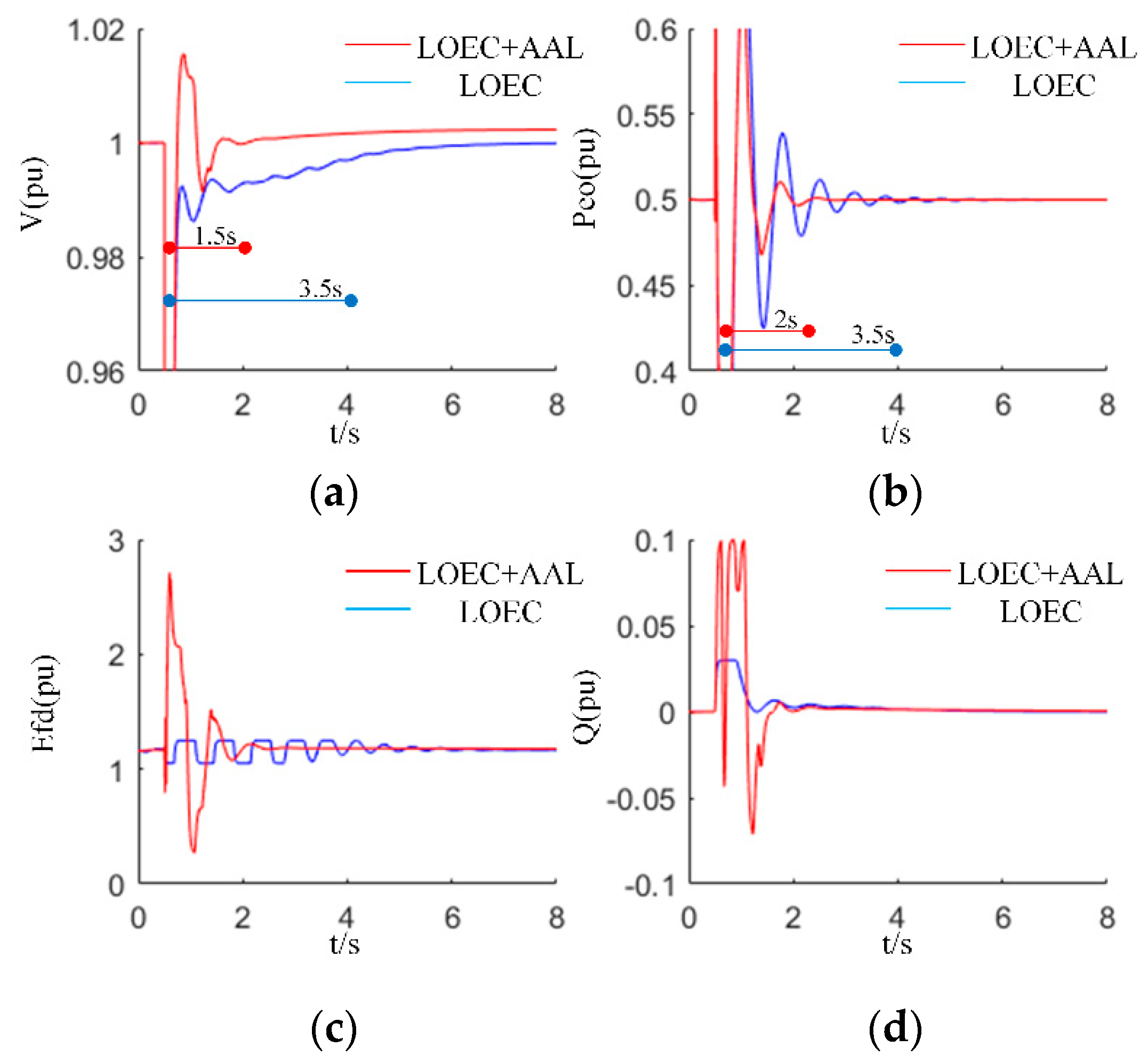
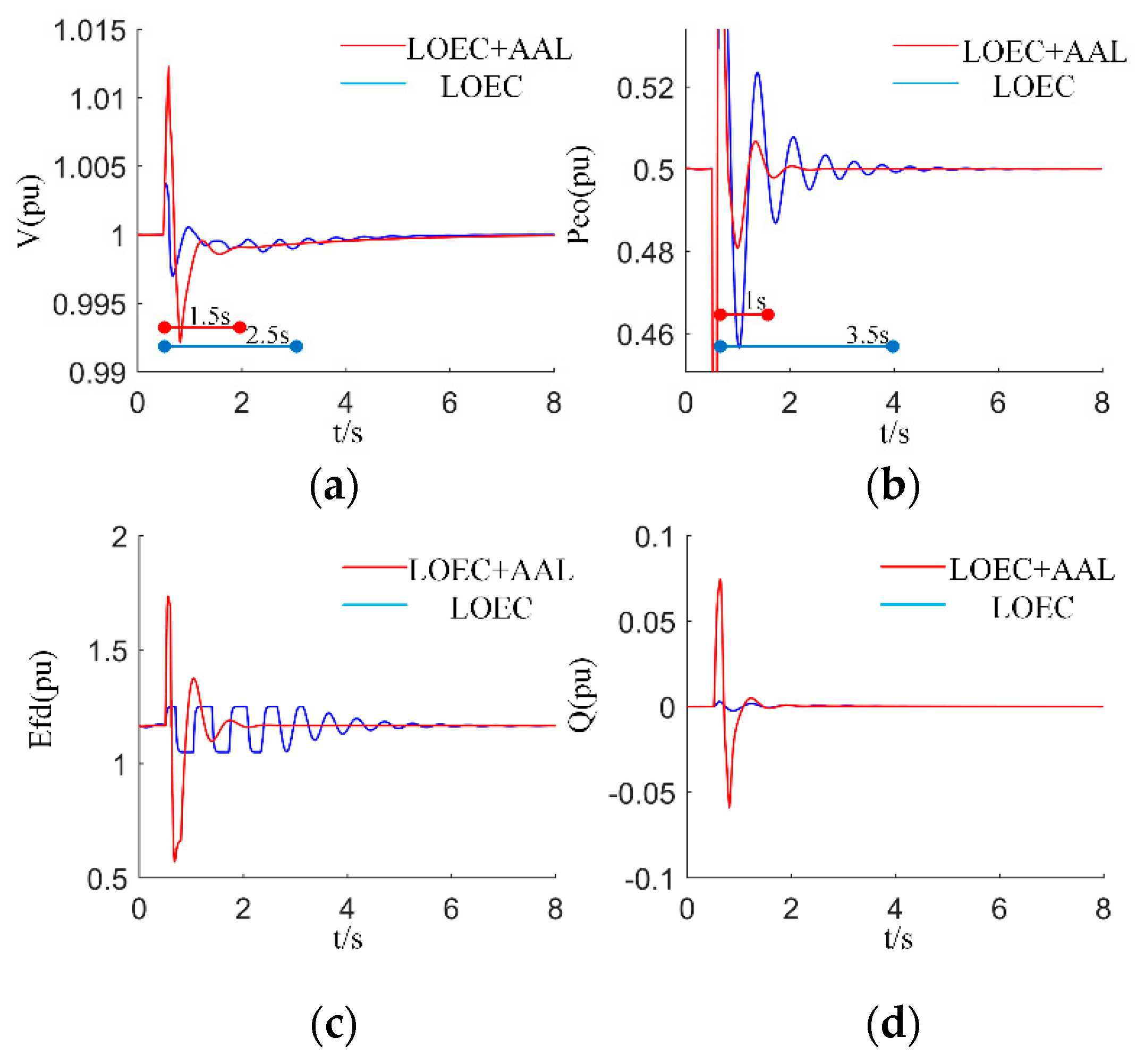
4.2.1. Three Phase Proximal Fault
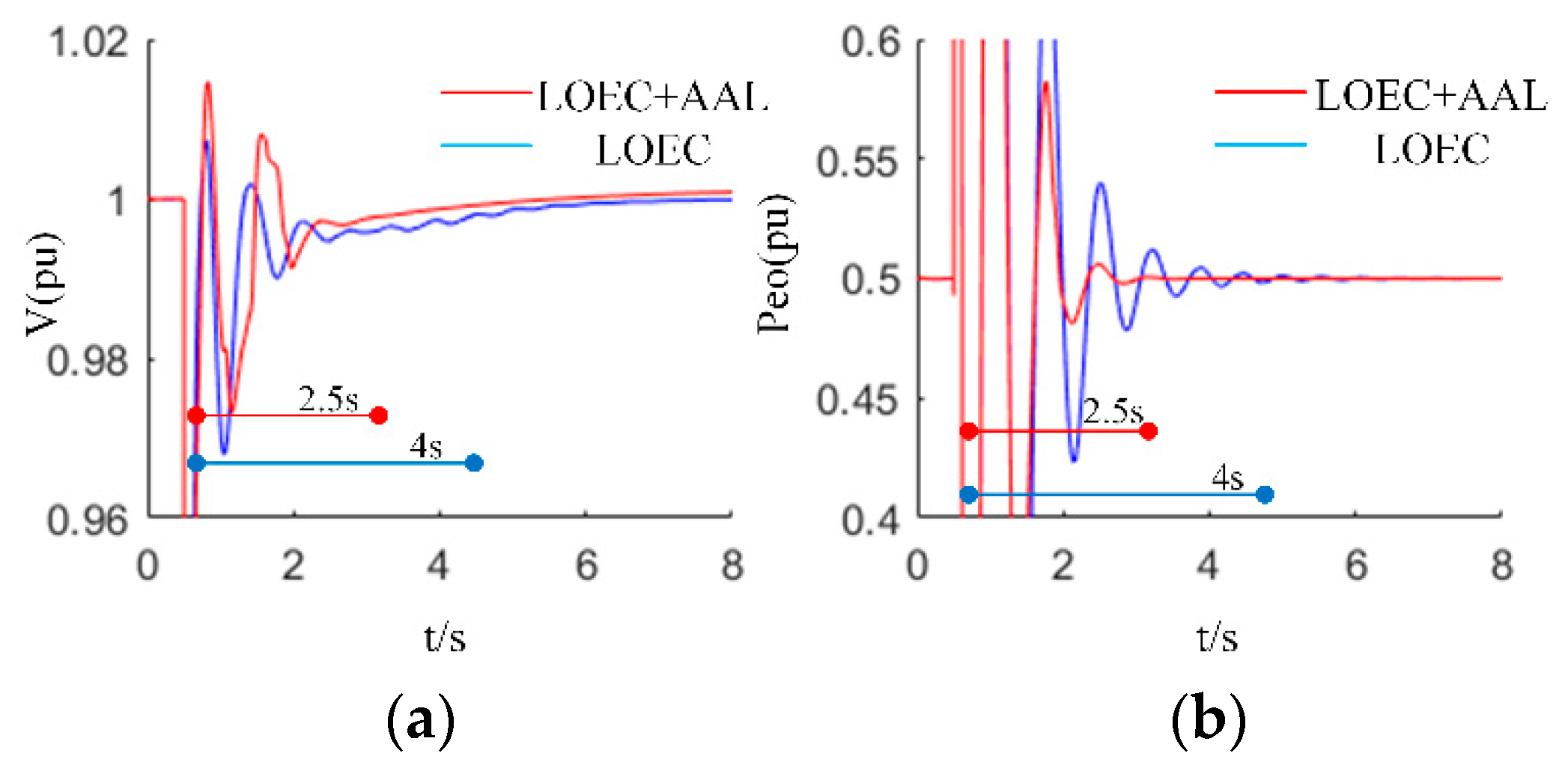
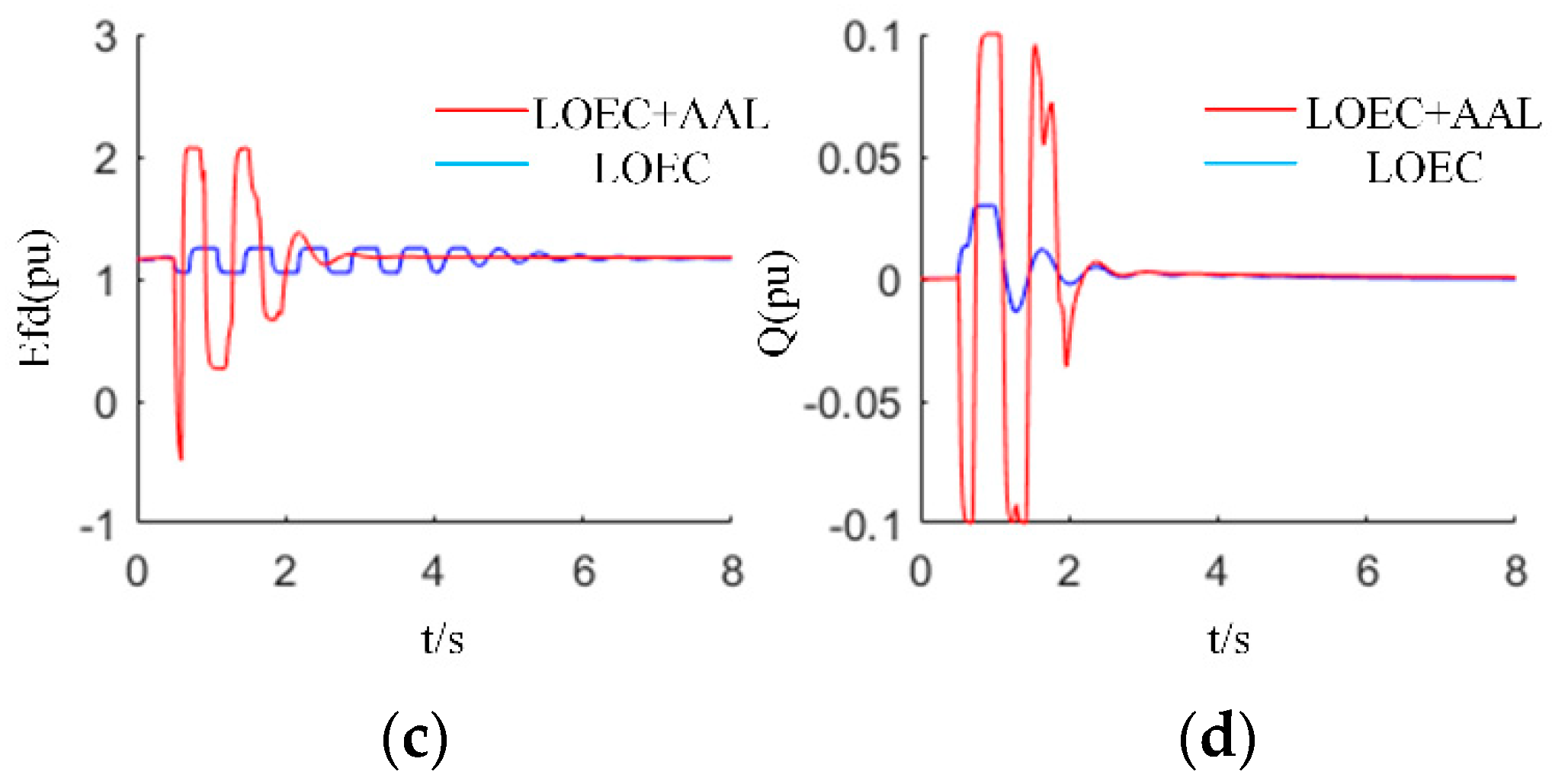
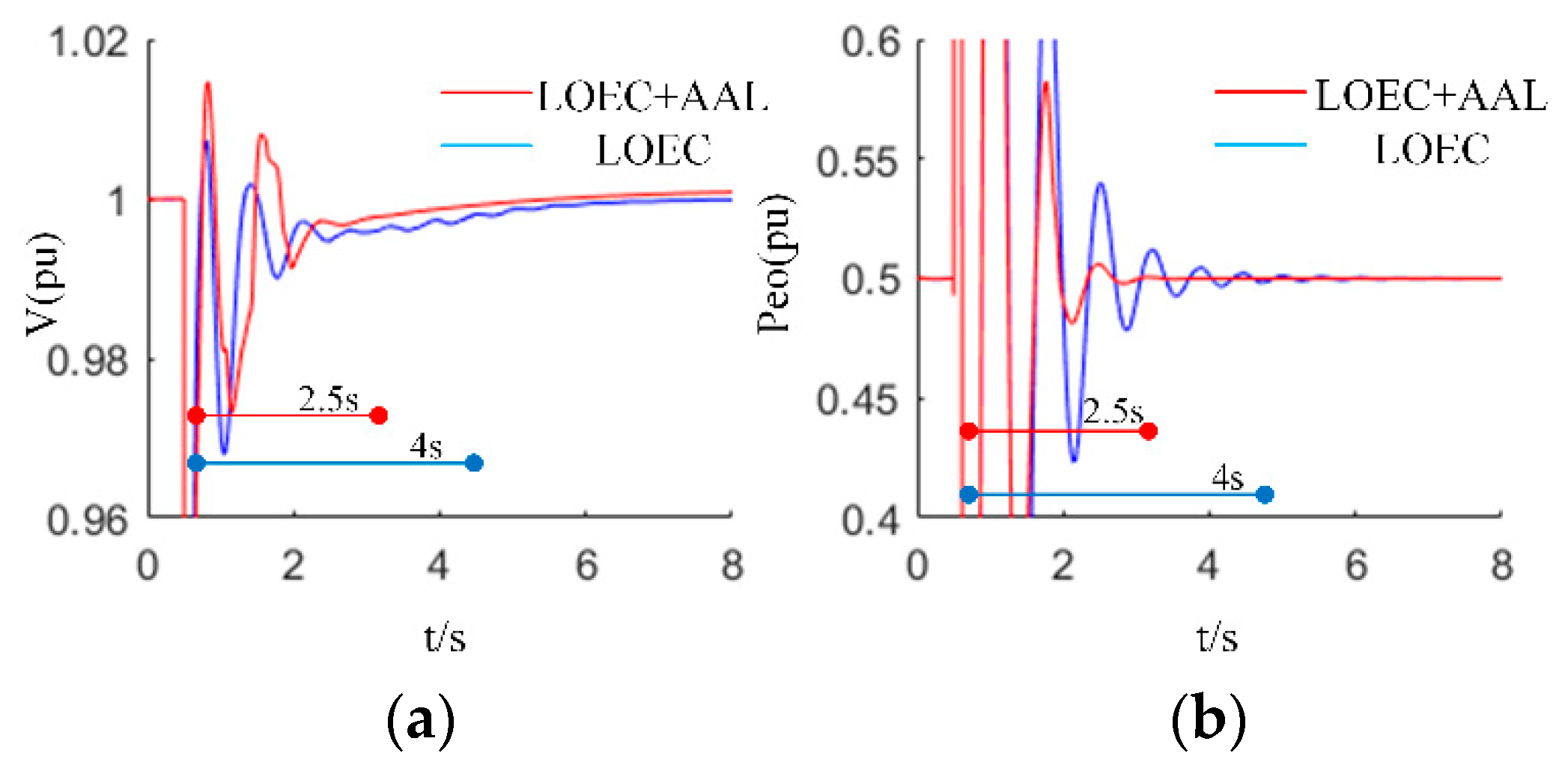
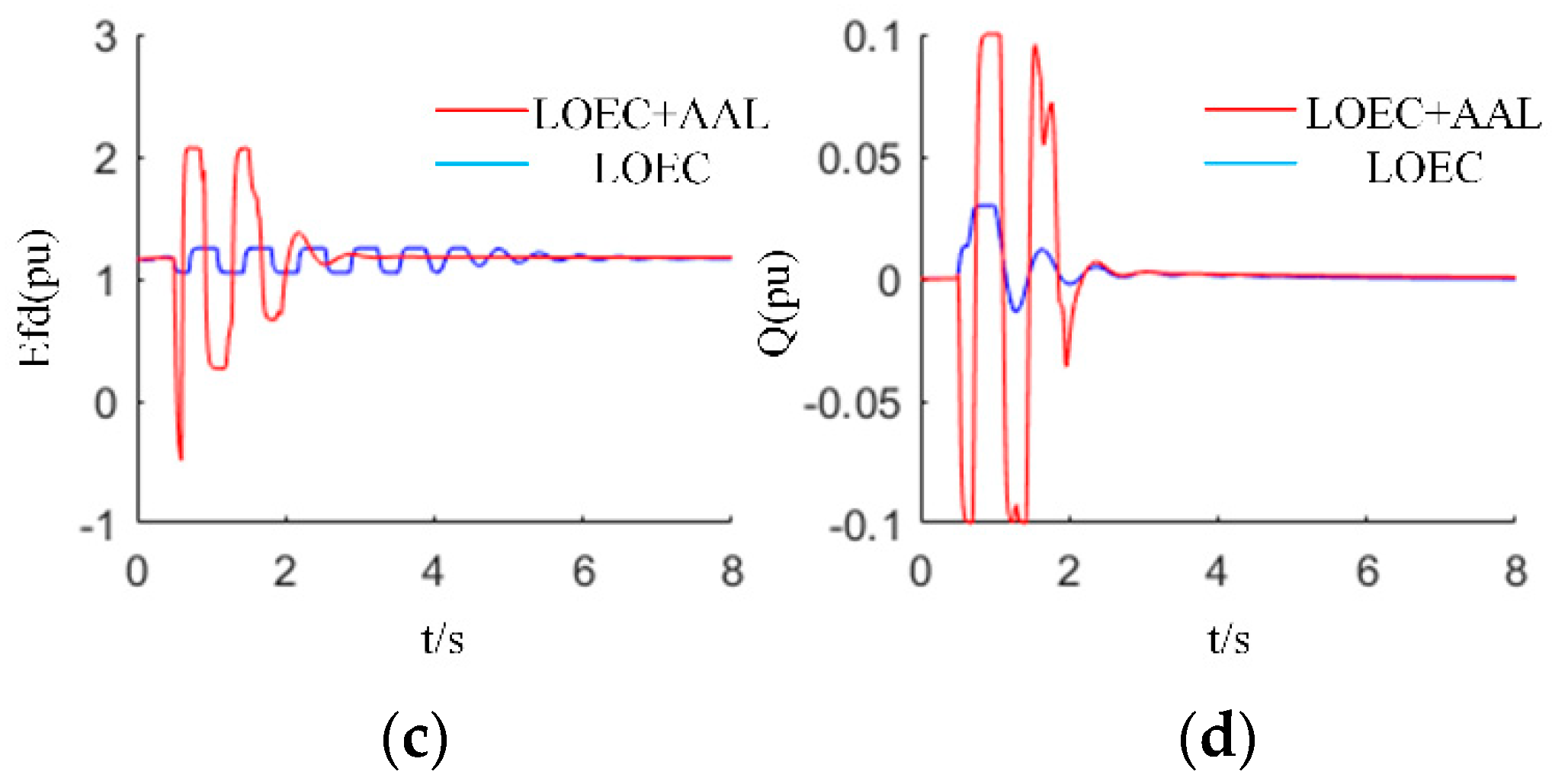
4.2.2. Three Phases Remote Fault
4.2.3. The Disconnection Fault
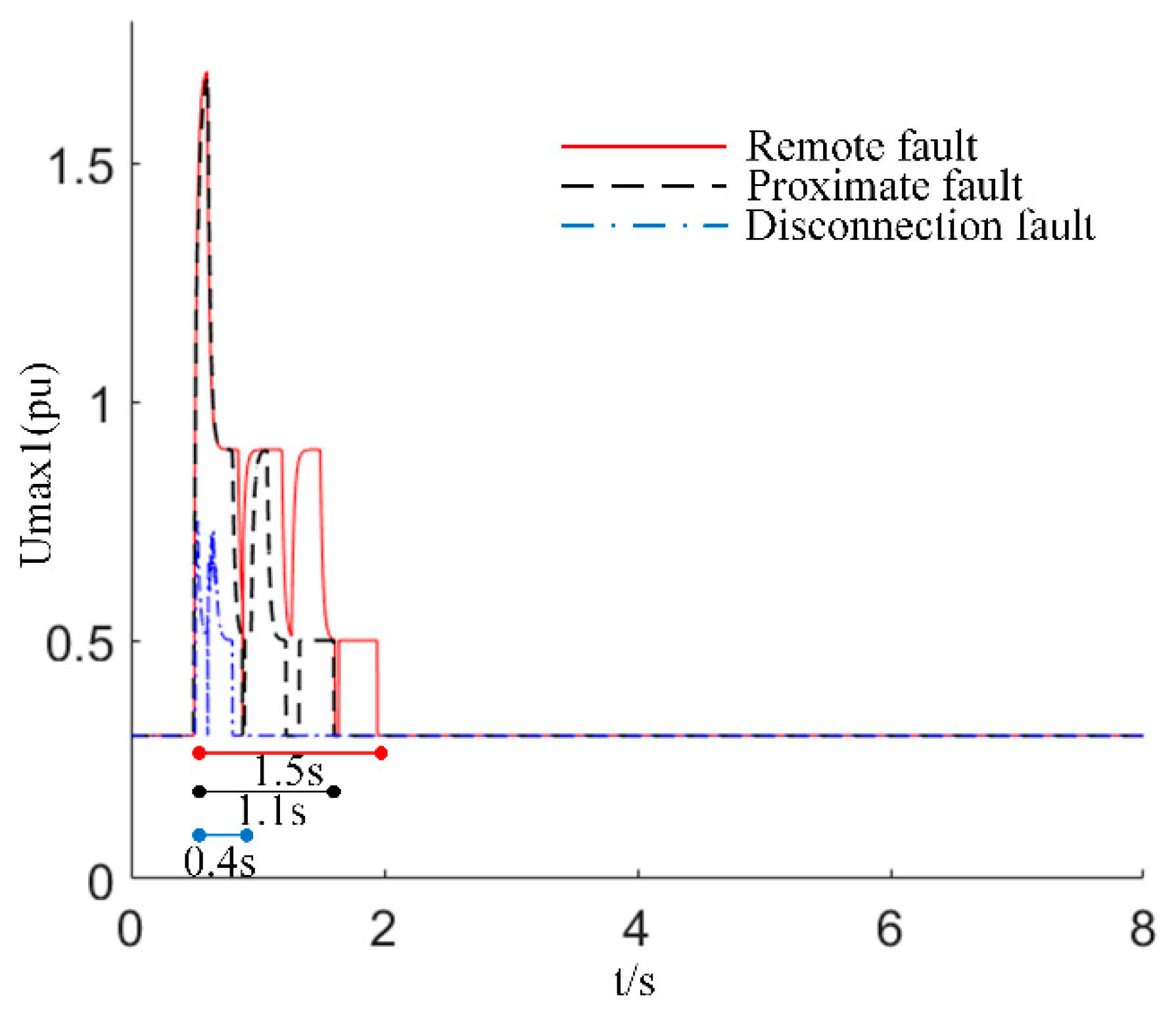
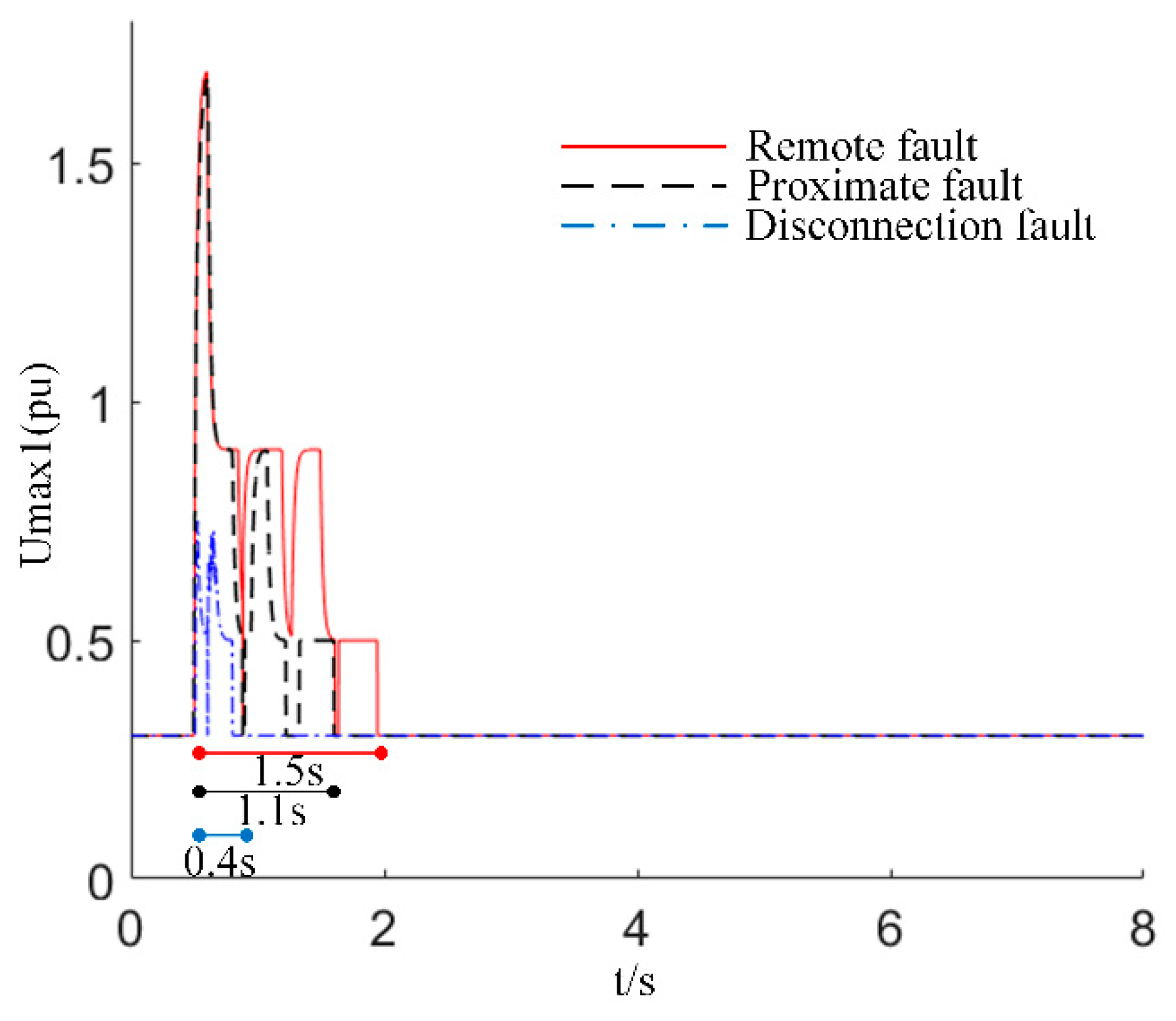
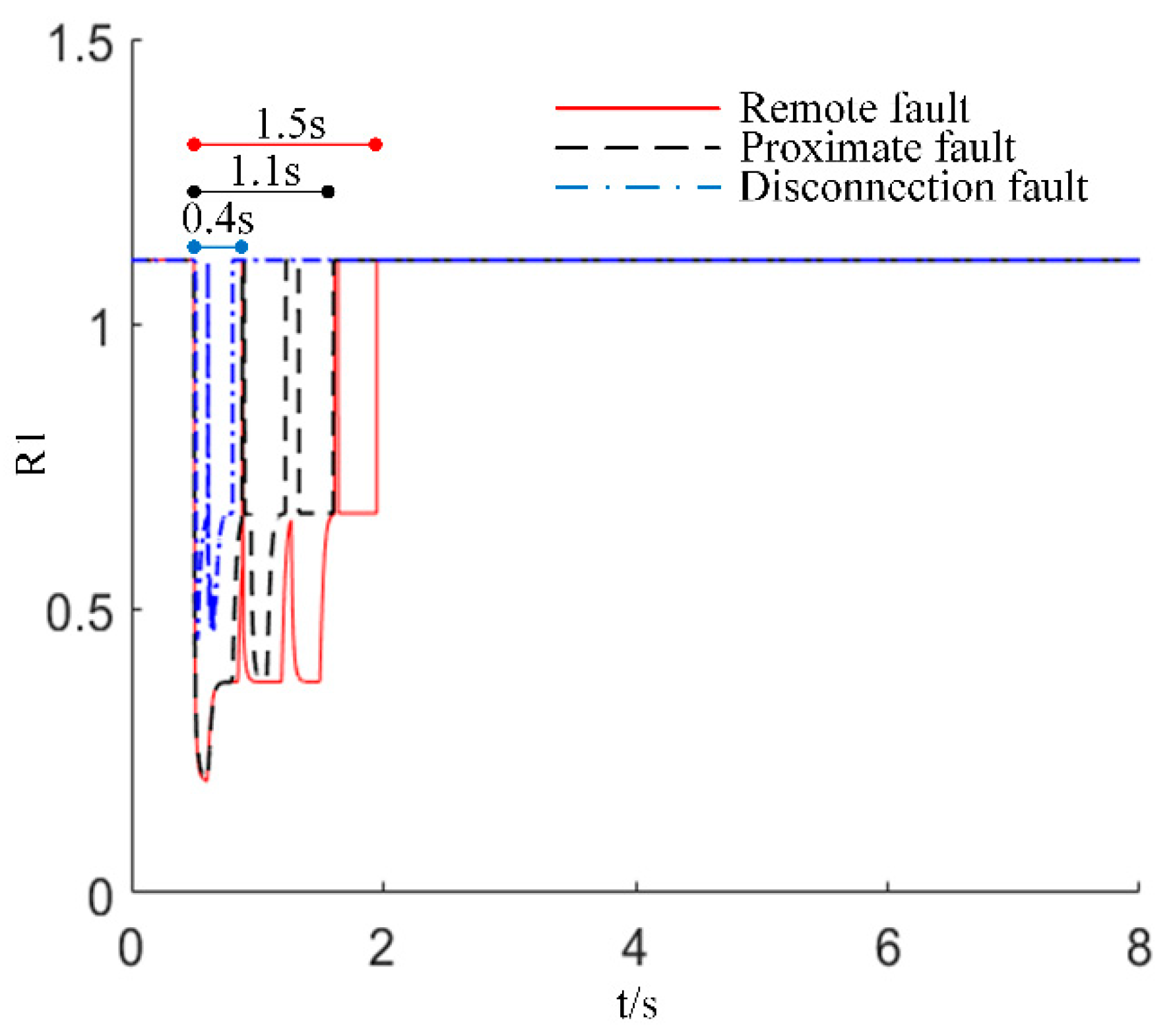
4.2.4. The Fuzzy Amplitude Limiter
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Chen, J.; Zhang, G.; Wang, L.; Qiu, R.; Liu, Z. An Active Oscillation Compensation Method to Mitigate High-Frequency Harmonic Instability and Low-Frequency Oscillation in Railway Traction Power Supply System. IEEE Access 2018, 6, 70359–70367. [Google Scholar] [CrossRef]
- Yu, Y.; Ju, P.; Peng, Y.; Lou, B.; Huang, H. Analysis of Dynamic Voltage Fluctuation Mechanism in Interconnected Power Grid with Stochastic Power Disturbances. J. Mod. Power Syst. Clean Energy 2020, 8, 38–45. [Google Scholar] [CrossRef]
- Xie, D.; Xu, Z.; Yang, L.; Østergaard, J.; Xue, Y.; Wong, K.P. A Comprehensive LVRT Control Strategy for DFIG Wind Turbines with Enhanced Reactive Power Support. IEEE Trans. Power Syst. 2013, 28, 3302–3310. [Google Scholar] [CrossRef]
- Liu, B.; Wu, W.; Zhou, C.; Mao, C.; Wang, D.; Duan, Q.; Sha, G. An AC–DC Hybrid Multi-Port Energy Router With Coordinated Control and Energy Management Strategies. IEEE Access 2019, 7, 109069–109082. [Google Scholar] [CrossRef]
- Luo, J.; Bu, S.; Zhu, J.; Chung, C.Y. Modal Shift Evaluation and Optimization for Resonance Mechanism Investigation and Mitigation of Power Systems Integrated With FCWG. IEEE Trans. Power Syst. 2020, 35, 4046–4055. [Google Scholar] [CrossRef]
- Sun, R.; Abeynayake, G.; Liang, J.; Wang, K. Reliability and Economic Evaluation of Offshore Wind Power DC Collection Systems. Energies 2021, 14, 2922. [Google Scholar] [CrossRef]
- Wang, D.; Wu, J.; Li, C.; Tian, J.; Mao, C. Analysis and Conception of Power Generation Mode and Operation Control of Largescale Compressed Air Energy Storage System. Autom. Electr. Power Syst. 2019, 43, 13–22. [Google Scholar]
- Mao, C.; Malik, O.; Hope, G.; Fan, J. An adaptive generator excitation controller based on linear optimal control. IEEE Trans. Energy Convers. 1990, 5, 673–678. [Google Scholar] [CrossRef]
- Chen, Z.; Lu, J.; Mao, C.; Zhou, Y.; Wang, D. Design and implementation of voltage source converter excitation system to improve power system stability. IEEE Trans. Ind. Appl. 2016, 52, 2778–2788. [Google Scholar] [CrossRef]
- Zhou, Y.; Mao, C.; Chen, Z.; Lu, J.; Wang, D. A novel control strategy for static excitation system based on three-phase current source converter. In Proceedings of the 2015 5th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT), Changsha, China, 26–29 November 2015; pp. 1240–1245. [Google Scholar]
- Yu, M.; He, S.; Cheng, L.; Zhang, T.; Mao, C.; Wang, D.; Xiong, H.; Zhang, J. Coordination Control Strategy of Intensive Excitation on Flexible Excitation System. Large Electr. Mach. Hydraul. Turbine 2020, 43, 59–65. [Google Scholar]
- Zhang, T.; Mao, C.; Zhang, J.; Tian, J.; Yu, M.; Wu, K.; Xiong, H.; Wu, L.; Yu, H. Design and Field Application of Flexible Excitation System Damping Controllers. IEEE Trans. Ind. Electron. 2021, 68, 949–959. [Google Scholar] [CrossRef]
- Mao, C.; He, J.; Wang, D.; Lu, J. Multivariable Feedback Linearization Scheme for New Excitation Systems Based on Full Controlled Devices. Proc. CSEE 2013, 33, 53–60. [Google Scholar]
- Yang, J.; Chen, Z.; Mao, C.; Wang, D.; Lu, J.; Sun, J.; Li, M.; Li, D.; Li, X. Analysis and assessment of VSC excitation system for power system stability enhancement. Int. J. Electr. Power Energy Syst. 2014, 57, 350–357. [Google Scholar] [CrossRef]
- Cheng, L.; Zhang, T.; He, S.; Yu, M.; Mao, C.; Wang, D. Optimal Coordinated Control of Full-controlled Excitation System with Energy Storage System. In Proceedings of the 2020 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Weihai, China, 13–16 July 2020; pp. 527–535. [Google Scholar]
- He, N.; Liu, Z. A Fuzzy automatic voltage and reactive power control device with self-recognition. Power Syst. Technol. 2000, 24, 52–56. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Value | Active Power Deviation ΔPeo | |||||
|---|---|---|---|---|---|---|
| Voltage deviation ΔVt | L | SL | M | SH | H | |
| L | MN | L | L | SL | SL | |
| SL | L | L | SL | SL | M | |
| M | SL | SL | M | M | SH | |
| SH | M | M | SH | SH | H | |
| H | SH | SH | H | H | MX | |
| Parameter | Value |
|---|---|
| Rated terminal voltage | 10.5 kV |
| Rated system voltage | 220 kV |
| Voltage rate of main transformer | 220 kV/10.5 kV |
| Voltage rate of excitation transformer | 10.5 kV/380 V |
| Rated frequency | 50 Hz |
| Rated capacity of VSC | 6.47 Mvar |
| Rated capacity of synchronous generator | 64.7 MVA |
| Rated capacity of main transformer | 150 MVA |
| Reactance of main transformer | 0.1 pu |
| Reactance of power line | 0.23 pu |
| d-axis transient reactance Xd’ of synchronous generator | 0.314 pu |
| d-axis transient time constant Tdo’ of synchronous generator | 7.31 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, Y.; Zhang, J.; Mao, C.; Xiong, H.; Zhang, T.; Wang, D. A Coordinated Optimal Strategy for Voltage and Reactive Power Control with Adaptive Amplitude Limiter Based on Flexible Excitation System. Energies 2021, 14, 5212. https://doi.org/10.3390/en14165212
Peng Y, Zhang J, Mao C, Xiong H, Zhang T, Wang D. A Coordinated Optimal Strategy for Voltage and Reactive Power Control with Adaptive Amplitude Limiter Based on Flexible Excitation System. Energies. 2021; 14(16):5212. https://doi.org/10.3390/en14165212
Chicago/Turabian StylePeng, Yuwei, Jiancheng Zhang, Chengxiong Mao, Hongtao Xiong, Tiantian Zhang, and Dan Wang. 2021. "A Coordinated Optimal Strategy for Voltage and Reactive Power Control with Adaptive Amplitude Limiter Based on Flexible Excitation System" Energies 14, no. 16: 5212. https://doi.org/10.3390/en14165212
APA StylePeng, Y., Zhang, J., Mao, C., Xiong, H., Zhang, T., & Wang, D. (2021). A Coordinated Optimal Strategy for Voltage and Reactive Power Control with Adaptive Amplitude Limiter Based on Flexible Excitation System. Energies, 14(16), 5212. https://doi.org/10.3390/en14165212