
A Modified Grid-Connected Inverter Topology for Power Oscillation Suppression under Unbalanced Grid Voltage Faults

 ,
,
Abstract
:1. Introduction
2. Relationship between Power Oscillation and Grid Voltage in Traditional Topology
2.1. Relationship among Output Current, Power Oscillation and Unbalanced Voltage
- (1).
- Numerical analysis of output current
- (2).
- Analysis of power oscillation
2.2. Deficiency of Traditional Inverter Topology
3. Principle and Advantages of Modified Topology for Grid-Connected Inverter
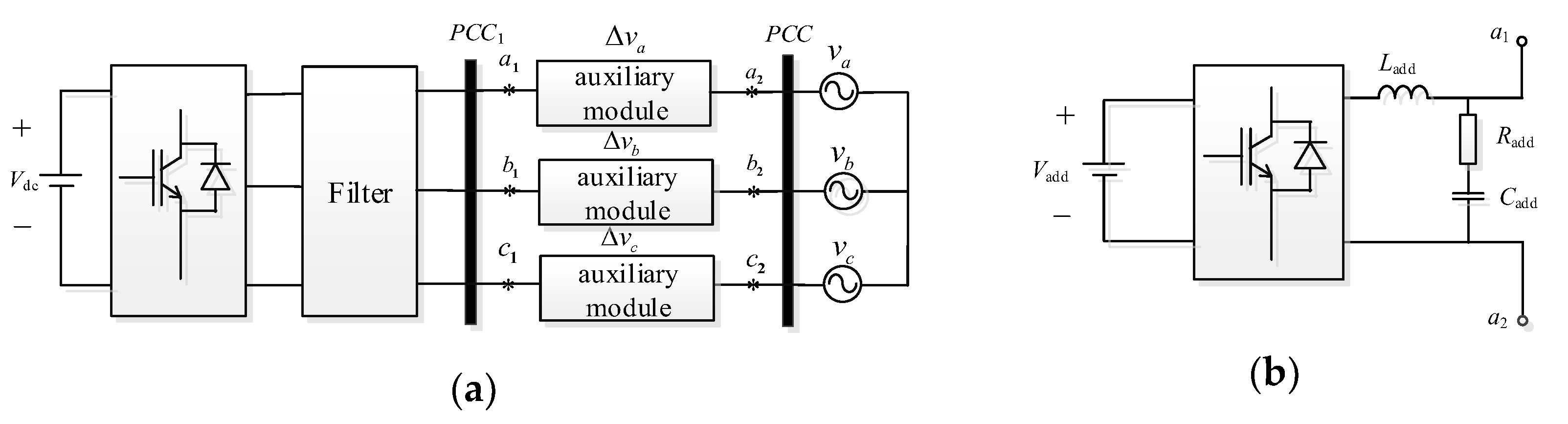
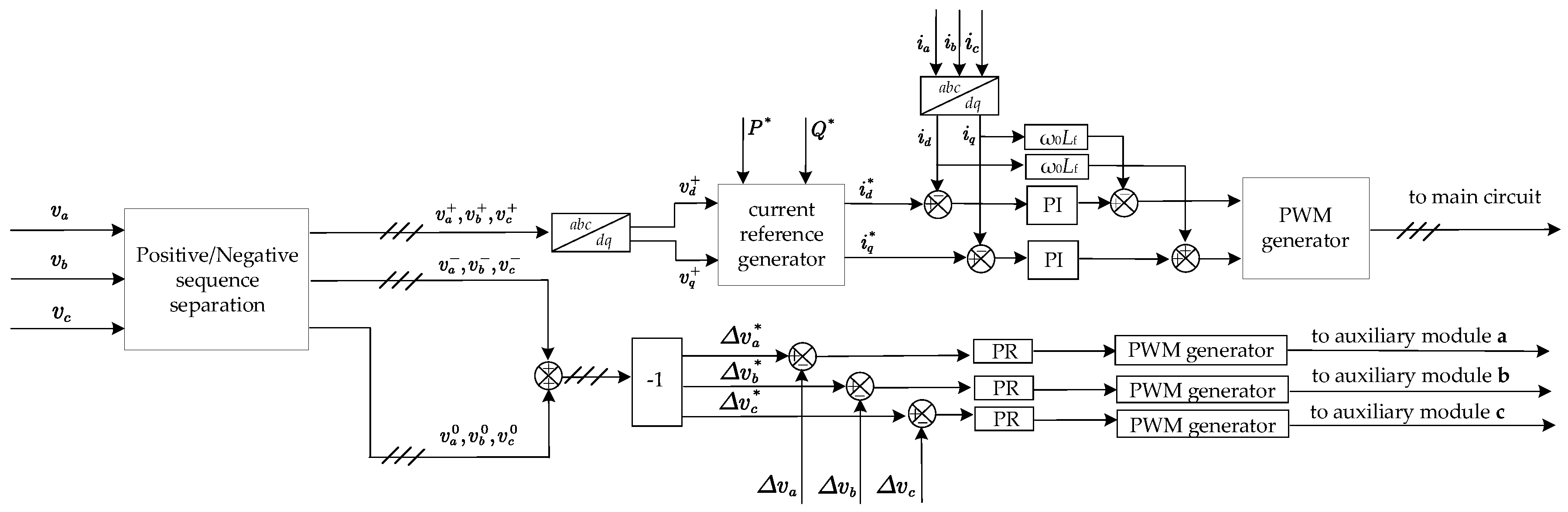
3.1. Modified Topology of Grid-Connected Inverters
3.2. Advantages of Modified Topology
3.3. Capacity Design of Auxiliary Modules
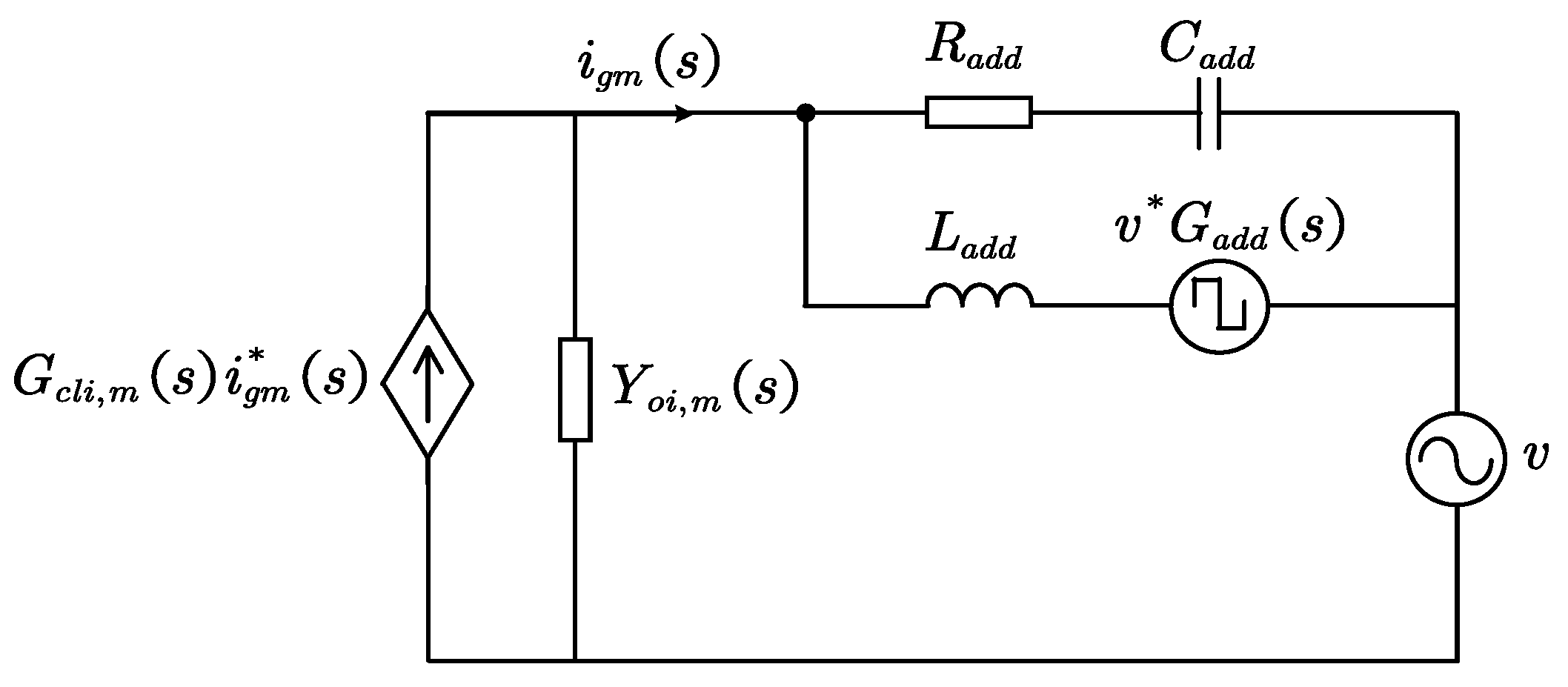
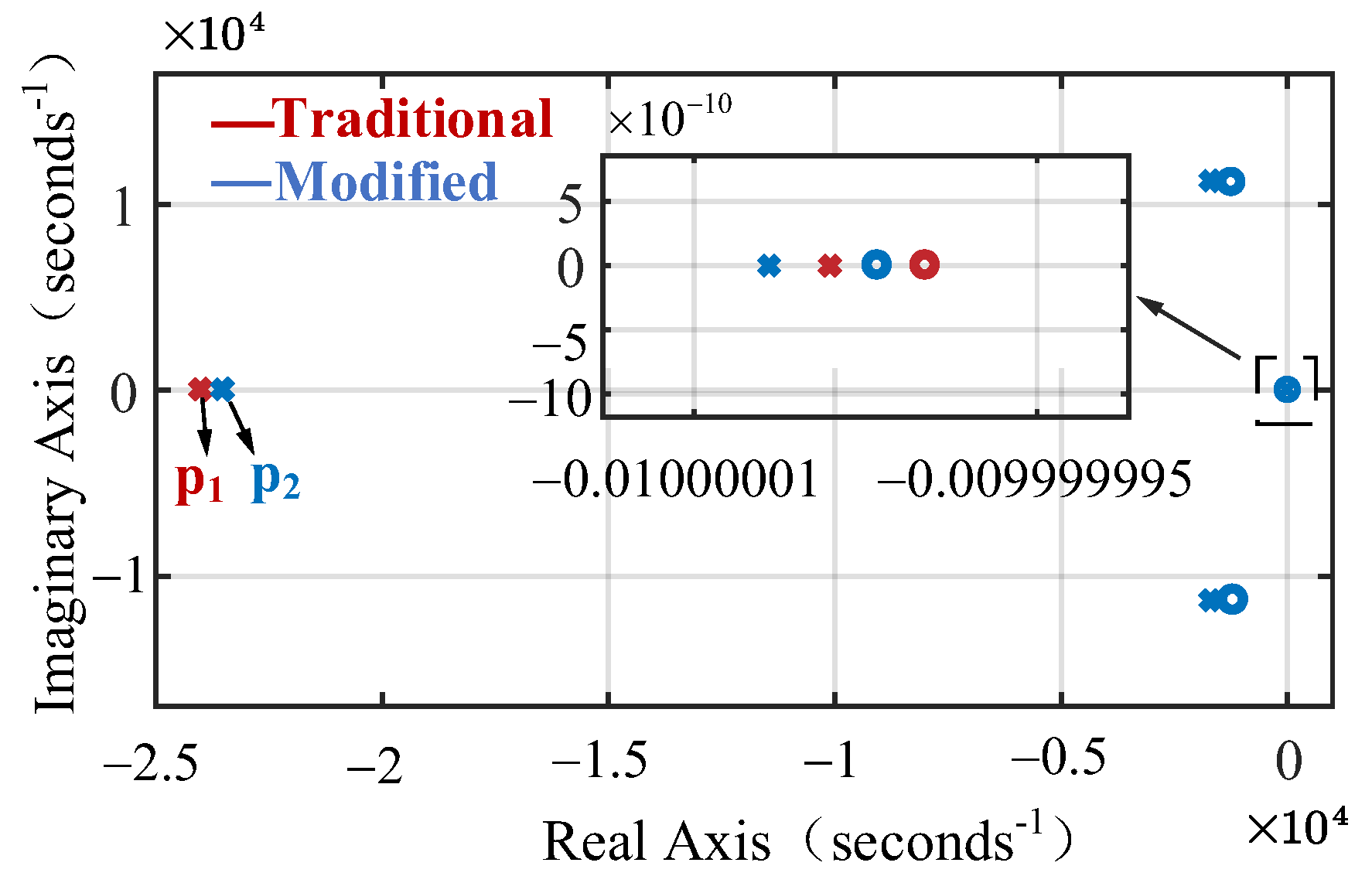
3.4. Stability Analysis of the Modified Topology
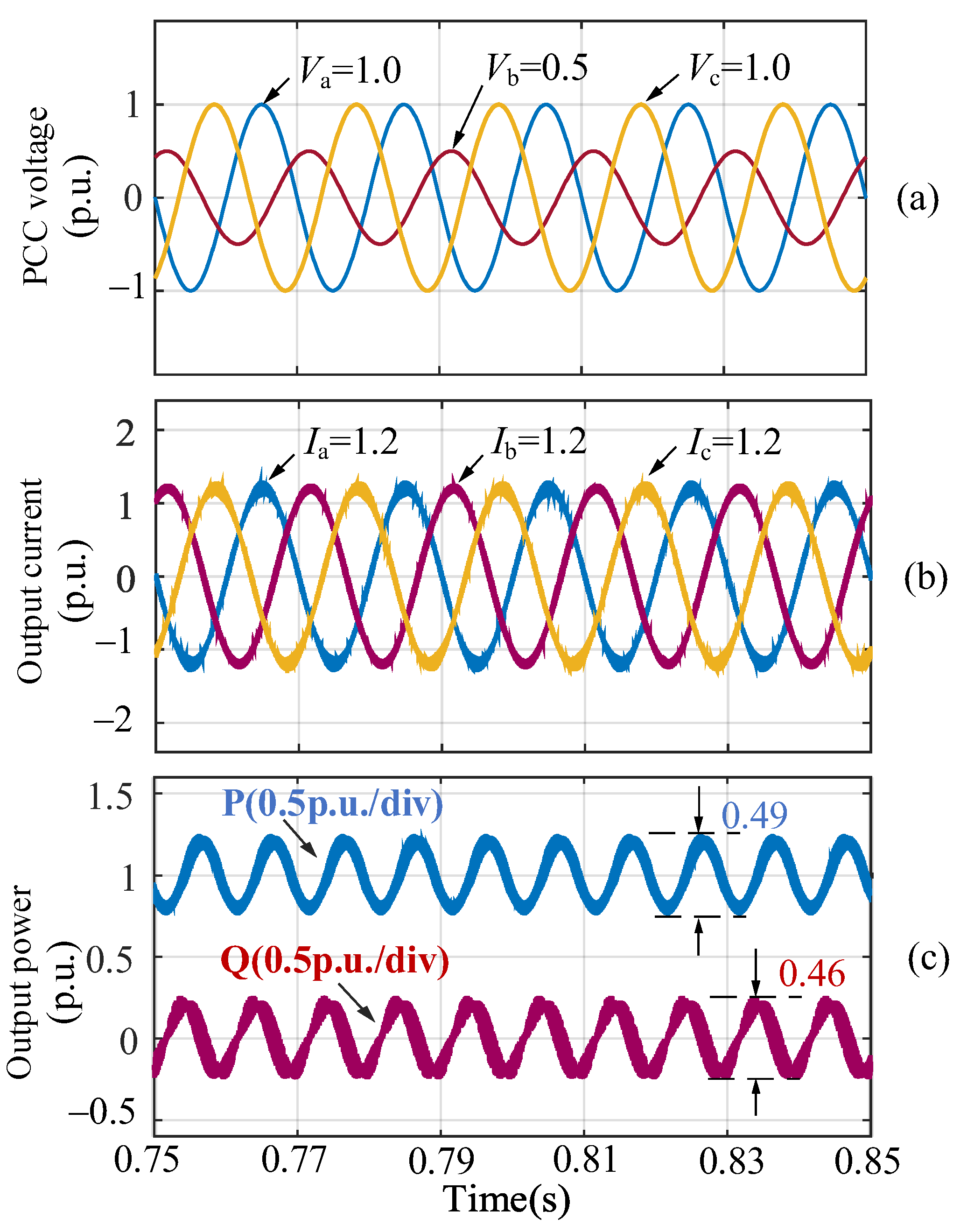
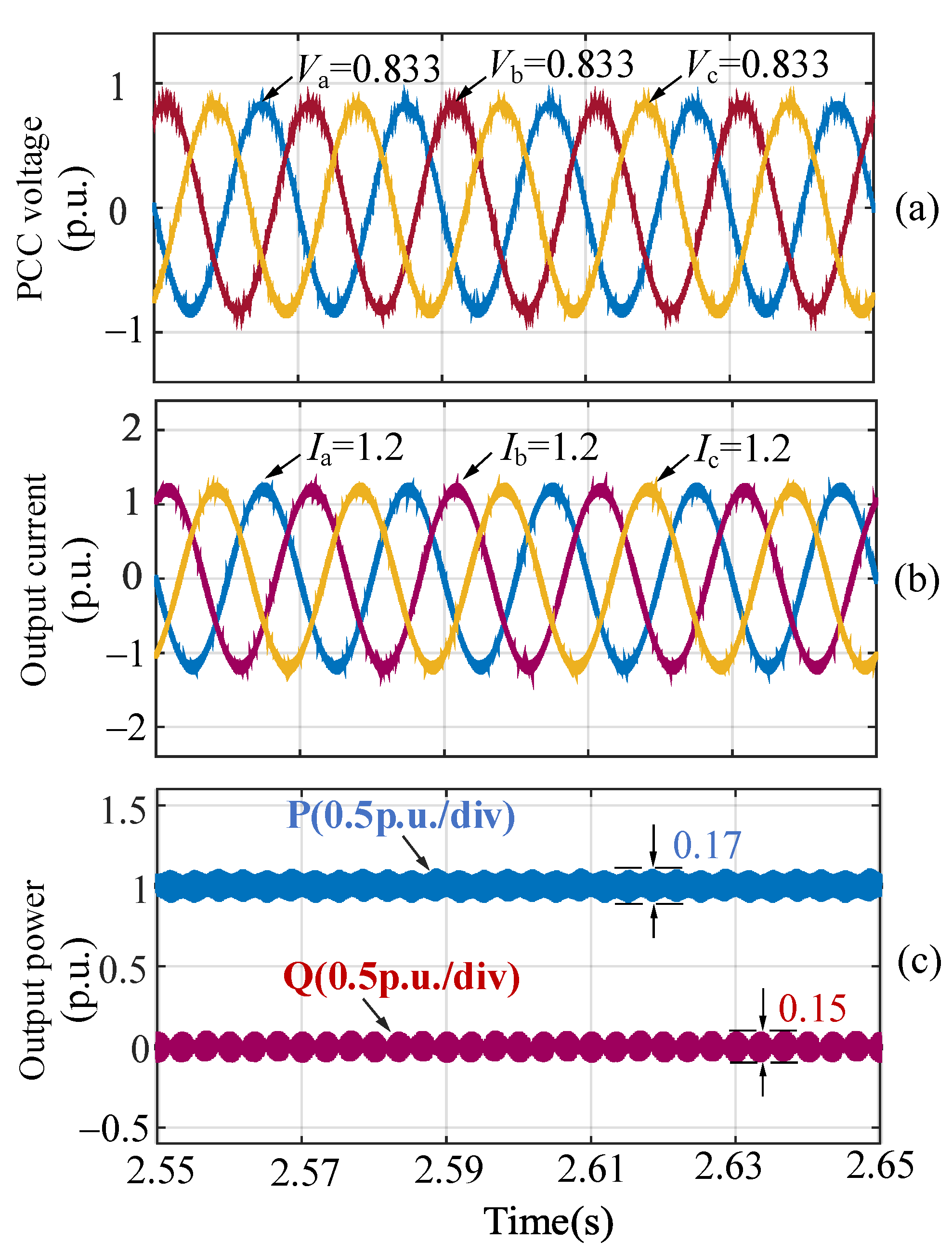
4. Simulation Results
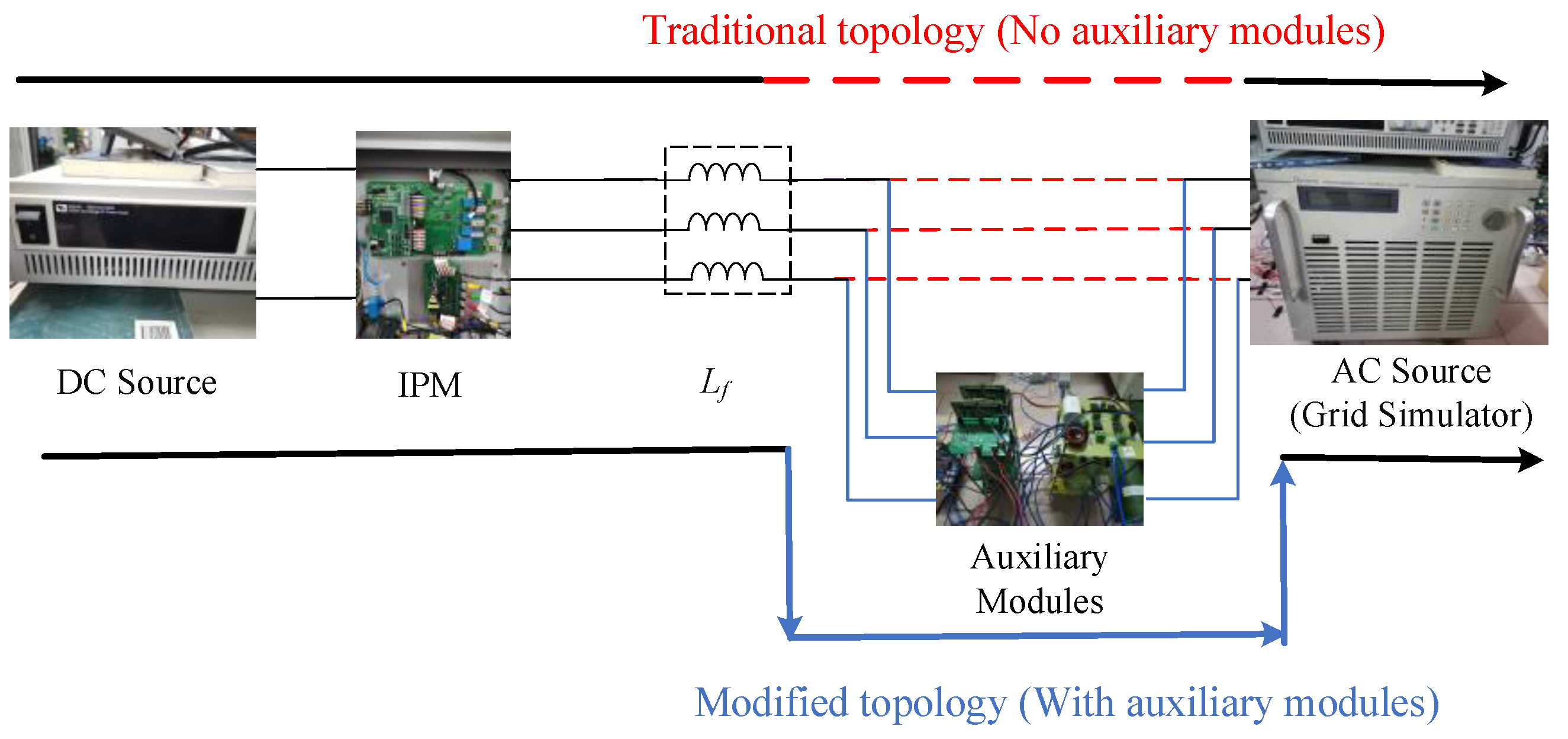
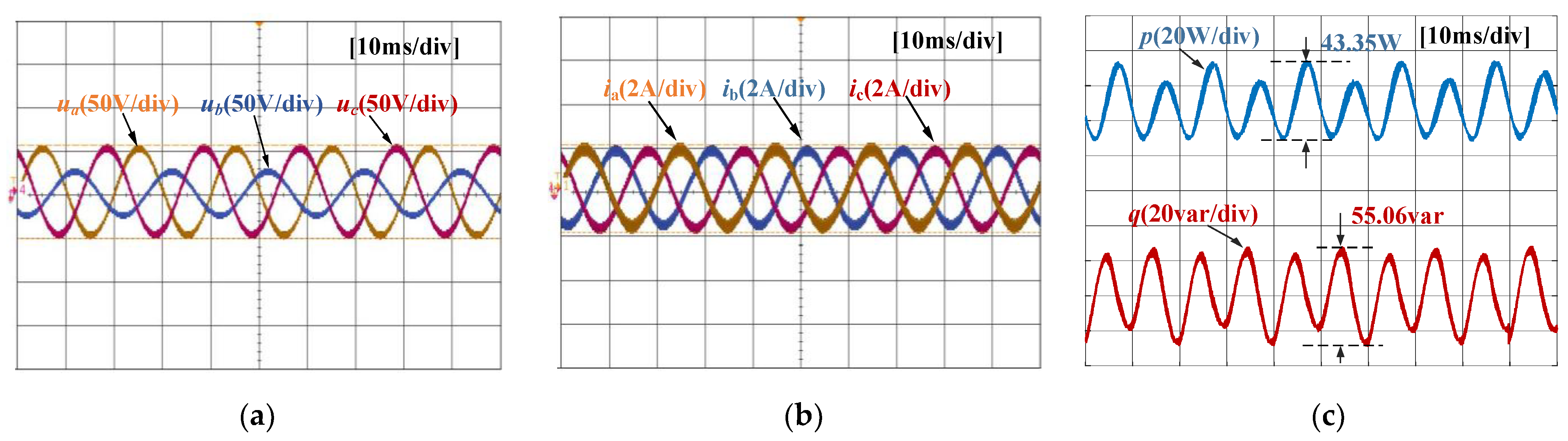
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Blaabjerg, F.; Liserre, M.; Ma, K. Power electronics converters for wind turbine systems. IEEE Trans. Ind. Appl. 2012, 48, 708–719. [Google Scholar] [CrossRef] [Green Version]
- Jia, J.; Yang, G.; Nielsen, A.H. Investigation of grid-connected voltage source converter performance under unbalanced faults. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 609–613. [Google Scholar]
- Tleis, N. Power Systems Modeling and Fault Analysis: Theory and Practice, 1st ed.; Elservier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Nian, H.; Cheng, P.; Zhu, Z.Q. Independent operation of DFIG-based WECS using resonant feedback compensators under unbalanced grid voltage conditions. IEEE Trans. Power Electron. 2015, 30, 3650–3661. [Google Scholar] [CrossRef]
- Taul, M.G.; Wang, X.; Davari, P.; Blaabjerg, F. An overview of assessment methods for synchronization stability of grid-connected converters under severe symmetrical grid faults. IEEE Trans. Power Electron. 2019, 34, 9655–9670. [Google Scholar] [CrossRef] [Green Version]
- Taul, M.G.; Wang, X.; Davari, P.; Blaabjerg, F. Current reference generation based on next generation grid code requirements of grid-tied converters during asymmetrical faults. IEEE J. Emerging Sel. Top. Power Electron. 2020, 8, 3784–3797. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Blaabjerg, F.; Chen, Z.; Wu, W. Resonance analysis in parallel voltage-controlled distributed generation inverters. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013; pp. 2977–2983. [Google Scholar]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Ng, C.H.; Ran, L.; Bumby, J. Unbalanced-grid-fault ride-through control for a wind turbine inverter. IEEE Trans. Ind. Appl. 2008, 44, 845–885. [Google Scholar] [CrossRef]
- Rodriguez, P.; Timbus, A.V.; Teodorescu, R.; Liserre, M.; Blaabjerg, F. Flexible active power control of distributed power generation systems during grid faults. IEEE Trans. Ind. Electron. 2007, 54, 2583–2592. [Google Scholar] [CrossRef]
- Guo, X.; Liu, W.; Zhang, X.; Sun, X.; Lu, Z.; Guerrero, J. Flexible control strategy for grid-connected inverter under unbalanced grid faults without PLL. IEEE Trans Power Electron. 2015, 30, 1773–1778. [Google Scholar] [CrossRef] [Green Version]
- Guo, X.; Liu, W.; Lu, Z. Flexible power regulation and current-limited control of grid-connected inverter under unbalanced grid voltage faults. IEEE Trans. Ind. Electron. 2017, 64, 7425–7432. [Google Scholar] [CrossRef]
- Camacho, A.; Castilla, M.; Miret, J.; Borrell, A.; de Vicuña, L.G. Active and reactive power strategies with peak current limitation for distributed generation inverters during unbalanced grid faults. IEEE Trans. Ind. Electron. 2015, 62, 1515–1525. [Google Scholar] [CrossRef] [Green Version]
- Du, X.; Wu, Y.; Gu, S.; Tai, H.; Sun, P.; Ji, Y. Power oscillation analysis and control of three-phase grid-connected voltage source converters under unbalanced grid faults. IET Power Electron. 2016, 9, 2162–2173. [Google Scholar] [CrossRef]
- Ma, K.; Chen, W.; Liserre, M.; Blaabjerg, F. Power controllability of a three-phase converter with an unbalanced AC source. IEEE Trans. Power Electron. 2015, 30, 1591–1604. [Google Scholar] [CrossRef]
- Saccomando, G.; Svensson, J.; Sannino, A. Improving voltage disturbance rejection for variable-speed wind turbines. IEEE Trans. Energy Conv. 2002, 17, 422–428. [Google Scholar] [CrossRef]
- Jia, J.; Yang, G.; Nielsen, A.H. A review on grid-connected converter control for short-circuit power provision under grid unbalanced faults. IEEE Trans. Power Deliv. 2018, 33, 649–661. [Google Scholar] [CrossRef] [Green Version]
- IEEE Standard 929. IEEE Recommended Practice for Utility Interface of Photovoltaic (PV) Systems; IEEE: Piscataway, NJ, USA, 2000. [Google Scholar]
- IEEE Standard 1547. IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems; IEEE: Piscataway, NJ, USA, 2003. [Google Scholar]
- Mortazavian, S.; Shabestary, M.M.; Mohamed, Y.A.I. Analysis and dynamic performance improvement of grid-connected voltage-source converters under unbalanced network conditions. IEEE Trans. Power Electron. 2017, 32, 8134–8149. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems, 1st ed.; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Wang, X.; Blaabjerg, F.; Wu, W. Modeling and analysis of harmonic stability in an AC power-electronics-based power system. IEEE Trans. Power Electron. 2014, 29, 6421–6432. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | Control Strategy | Characteristics | ||
|---|---|---|---|---|
| Oscillation Cancellation | Current Quality | |||
| Active Power | Reactive Power | |||
| 1 | Average Active Reactive Control | × | √ | × |
| 0 | Balanced Positive Sequence Control | × | × | √ |
| −1 | Positive Negative Sequence Control | √ | × | × |
| Other value | Trade-off between power oscillation cancellation and current quality | |||
| Symbol | Description | Value (p.u.) |
|---|---|---|
| Va | Amplitude value of A-phase voltage | 220 V (1 p.u.) |
| Vb | Amplitude value of B-phase voltage | 110 V (0.5 p.u.) |
| Vc | Amplitude value of C-phase voltage | 220 V (1 p.u.) |
| P0 | Output power | 10 kW (1 p.u.) |
| f0 | Fundamental frequency | 50 Hz |
| fsw | Operating frequency | 10 kHz |
| Lf | Output inductor | 0.044 p.u. |
| Vdc | DC voltage | 700 V |
| kp | Proportional coefficient | 2.0 |
| ki | Integral coefficient | 1.0 |
| Symbol | Parameter | Value (p.u.) |
|---|---|---|
| Va | Amplitude value of A-phase voltage | 50 V (1 p.u.) |
| Vb | Amplitude value of B-phase voltage | 25 V (0.5 p.u.) |
| Vc | Amplitude value of C-phase voltage | 50 V (1 p.u.) |
| P0 | Output power | 105 W (1 p.u.) |
| f0 | Fundamental frequency | 50 Hz |
| fsw | Operating frequency | 10 kHz |
| Lf | Output inductor | 0.044 p.u. |
| Vdc | DC voltage | 120 V |
| kp ki | Proportional coefficient Integral coefficient | 2.0 2.0 |
| Symbol | Parameter | Value |
|---|---|---|
| Vadd | DC voltage of auxiliary module | 36 V |
| fadd | Switching frequency of auxiliary module | 10 kHz |
| Cadd | Filter capacitor of auxiliary module | 15 μF |
| Ladd | Filter inductor of auxiliary module | 800 μH |
| Radd | Damping resistance of auxiliary module | 2.0 Ω |
| kp kr | Proportional coefficient Resonant coefficient | 0.01 4.0 |
| Symbol | Parameter | Value |
|---|---|---|
| Vadd | DC voltage of auxiliary module | 150 V |
| fadd | Switching frequency of auxiliary module | 10 kHz |
| Cadd | Filter capacitor of auxiliary module | 15 μF |
| Ladd | Filter inductor of auxiliary module | 800 μH |
| Radd | Damping resistance of auxiliary module | 2.0 Ω |
| kp kr | Proportional coefficient Resonant coefficient | 0.02 16.91 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, C.; Ma, X.; Yang, L.; Li, Y.; Yang, X.; Ren, J.; Zhang, Y. A Modified Grid-Connected Inverter Topology for Power Oscillation Suppression under Unbalanced Grid Voltage Faults. Energies 2021, 14, 5057. https://doi.org/10.3390/en14165057
Luo C, Ma X, Yang L, Li Y, Yang X, Ren J, Zhang Y. A Modified Grid-Connected Inverter Topology for Power Oscillation Suppression under Unbalanced Grid Voltage Faults. Energies. 2021; 14(16):5057. https://doi.org/10.3390/en14165057
Chicago/Turabian StyleLuo, Cheng, Xikui Ma, Lihui Yang, Yongming Li, Xiaoping Yang, Junhui Ren, and Yanmei Zhang. 2021. "A Modified Grid-Connected Inverter Topology for Power Oscillation Suppression under Unbalanced Grid Voltage Faults" Energies 14, no. 16: 5057. https://doi.org/10.3390/en14165057
APA StyleLuo, C., Ma, X., Yang, L., Li, Y., Yang, X., Ren, J., & Zhang, Y. (2021). A Modified Grid-Connected Inverter Topology for Power Oscillation Suppression under Unbalanced Grid Voltage Faults. Energies, 14(16), 5057. https://doi.org/10.3390/en14165057