
An Improved Method Based on Deep Learning for Insulator Fault Detection in Diverse Aerial Images


Abstract
:1. Introduction
2. YOLOv3 Network
3. Materials and Methods
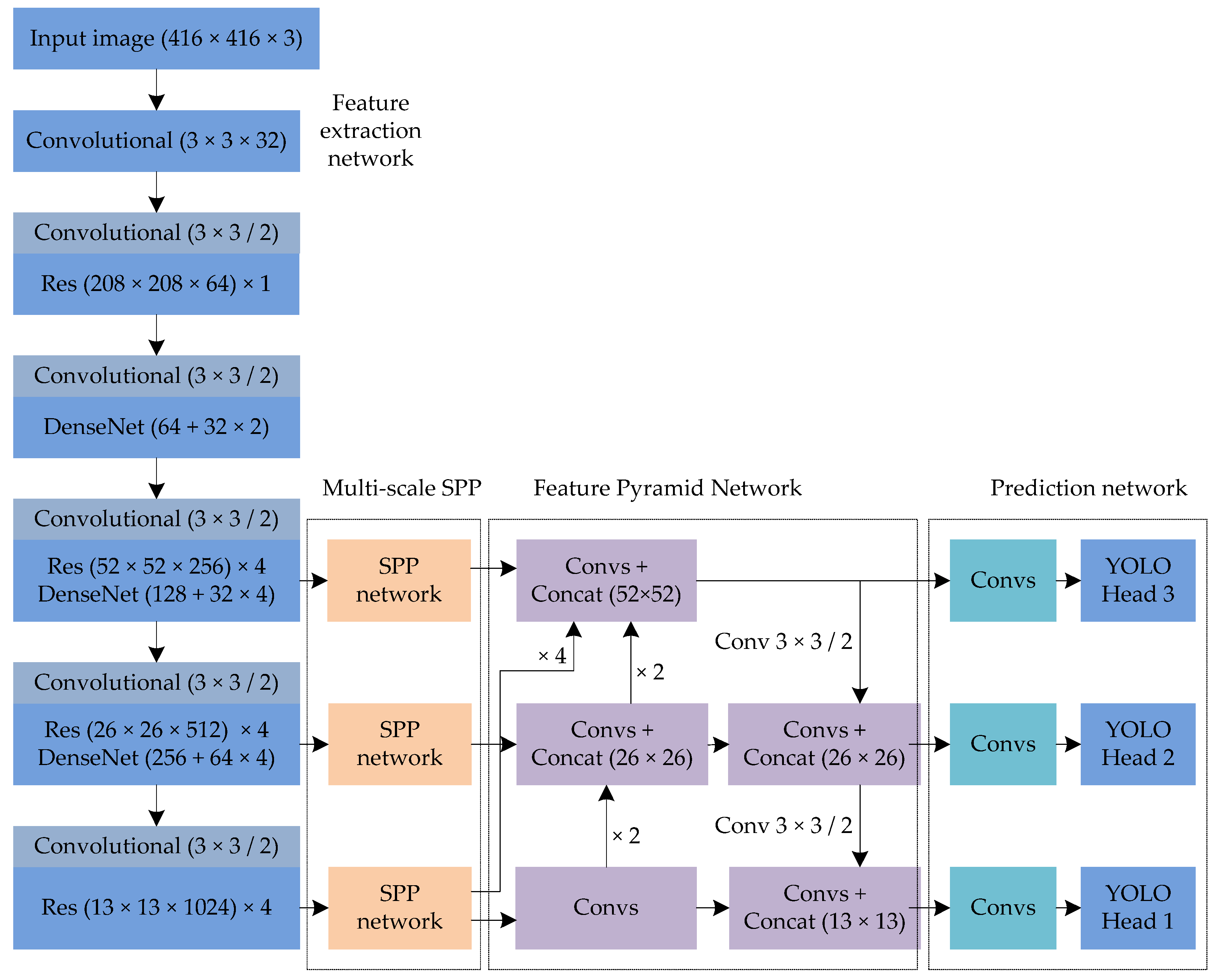
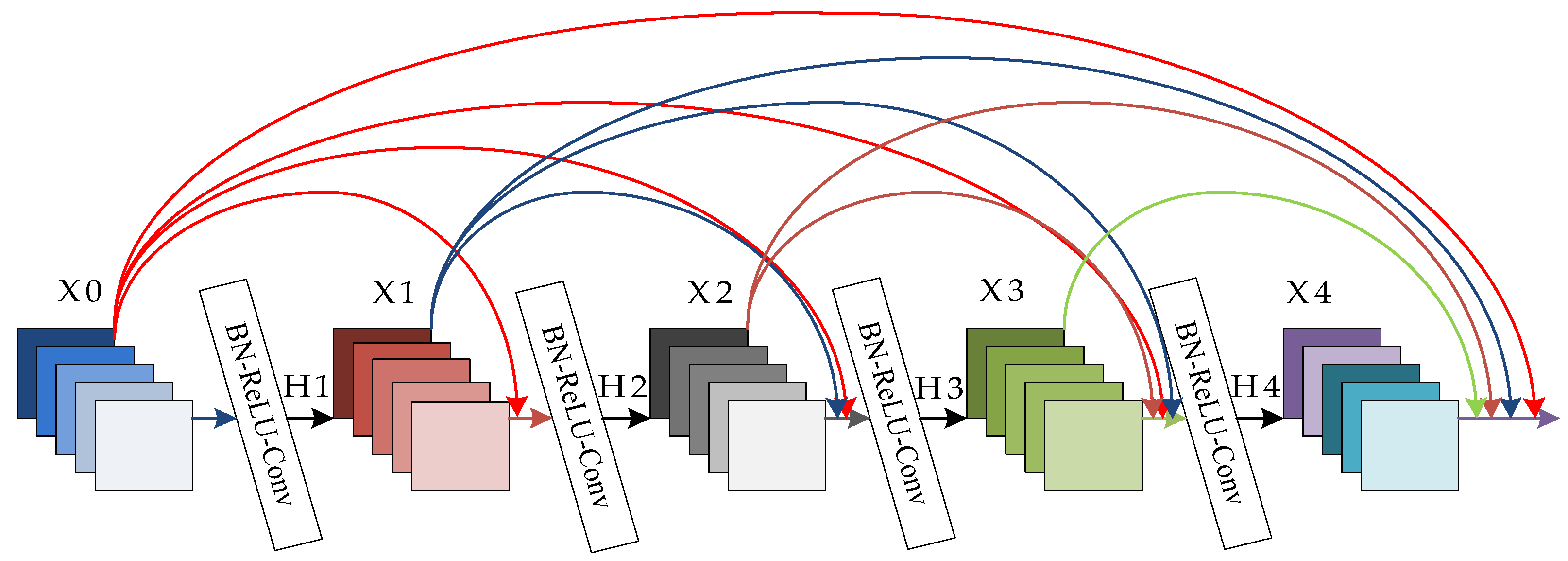
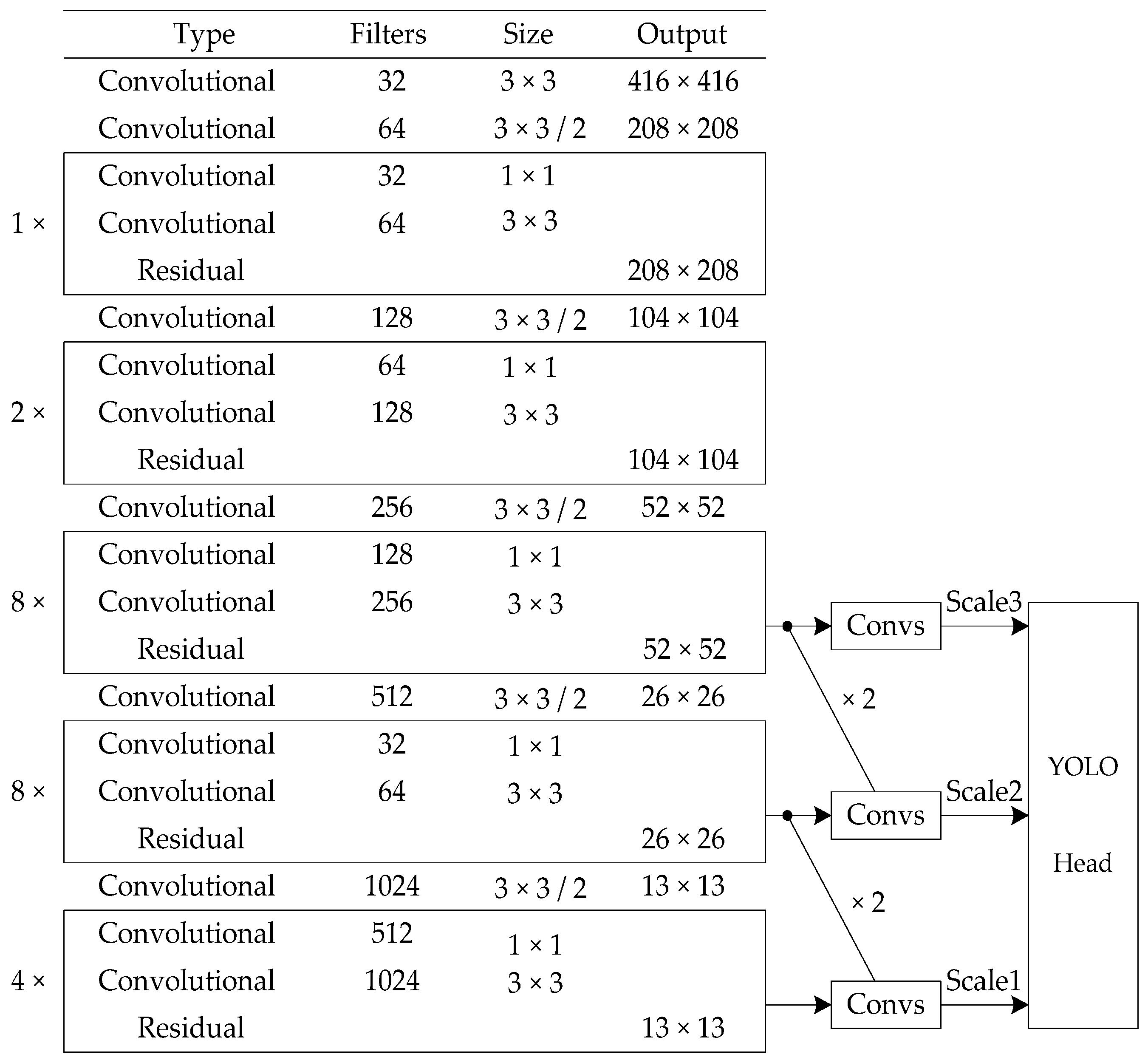
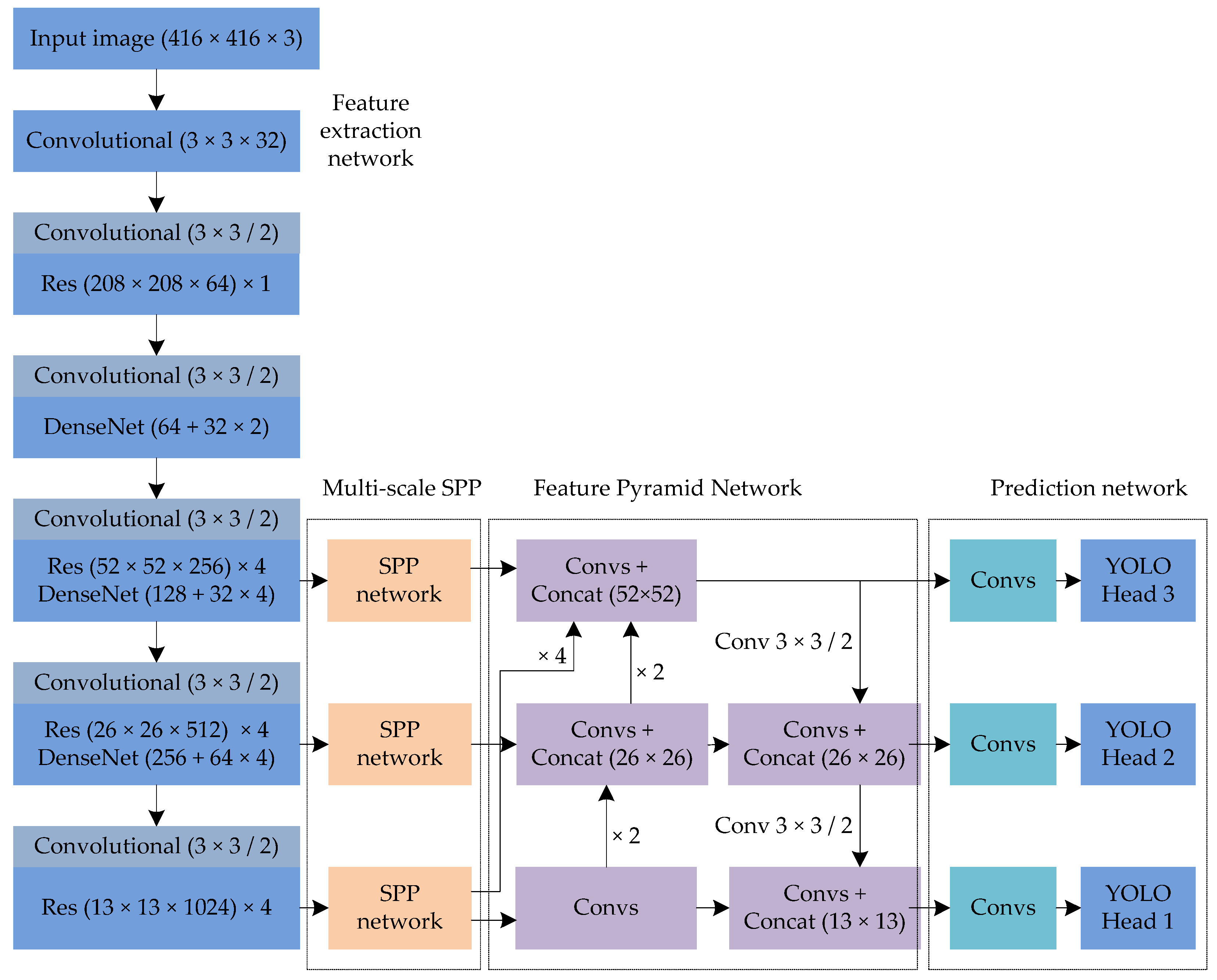
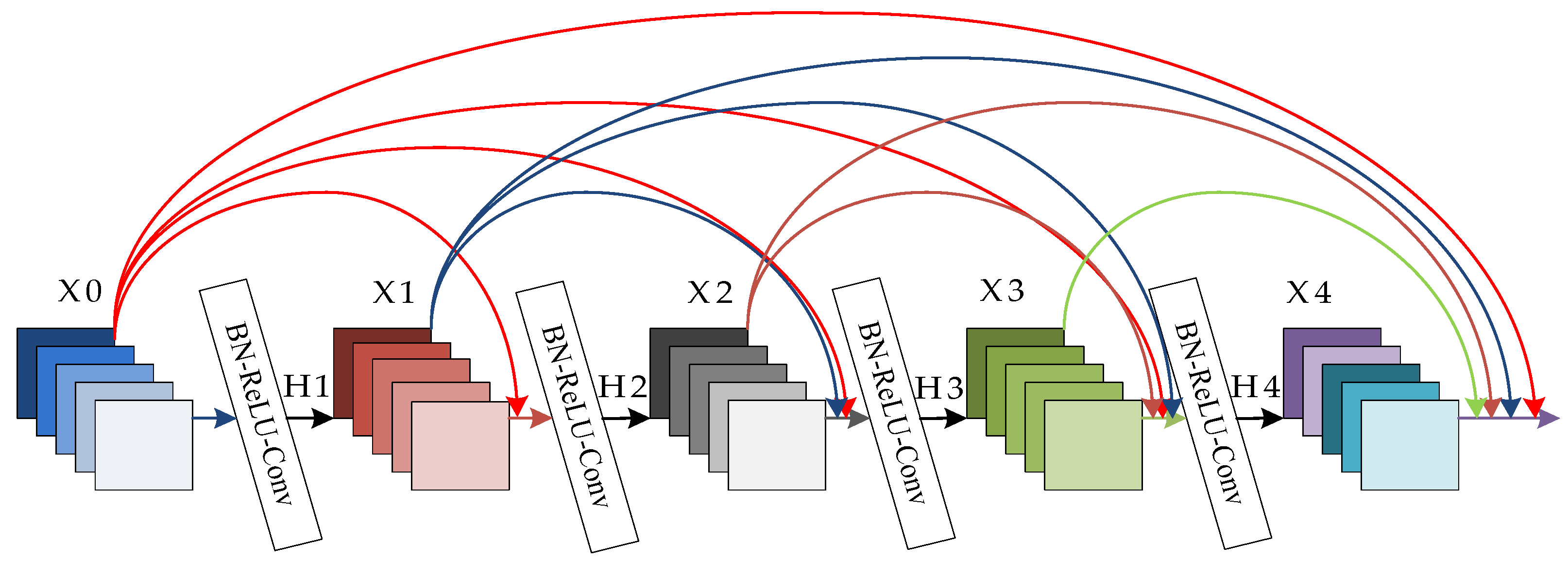
3.1. Feature Extraction Network of the Improved YOLOv3
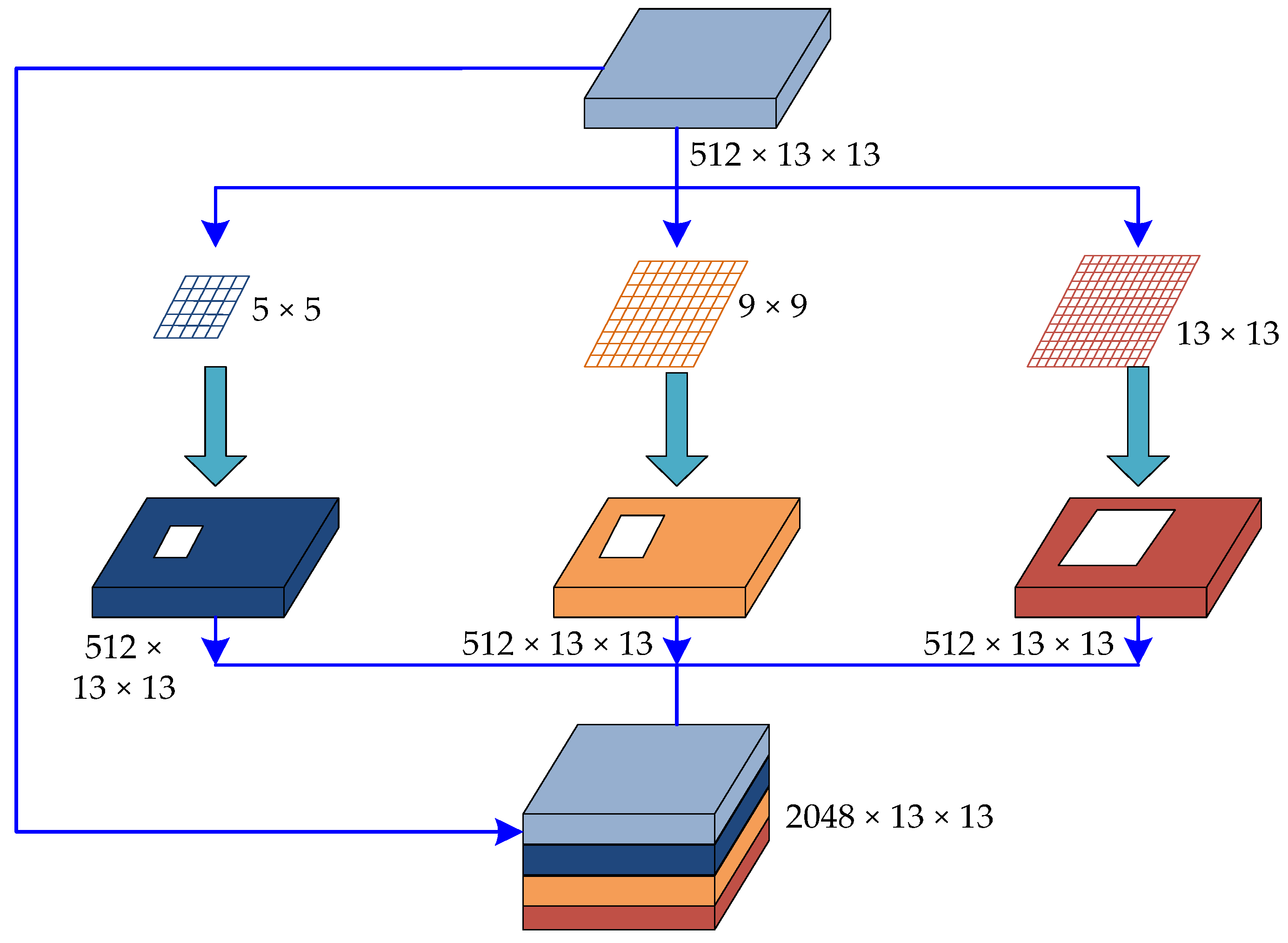
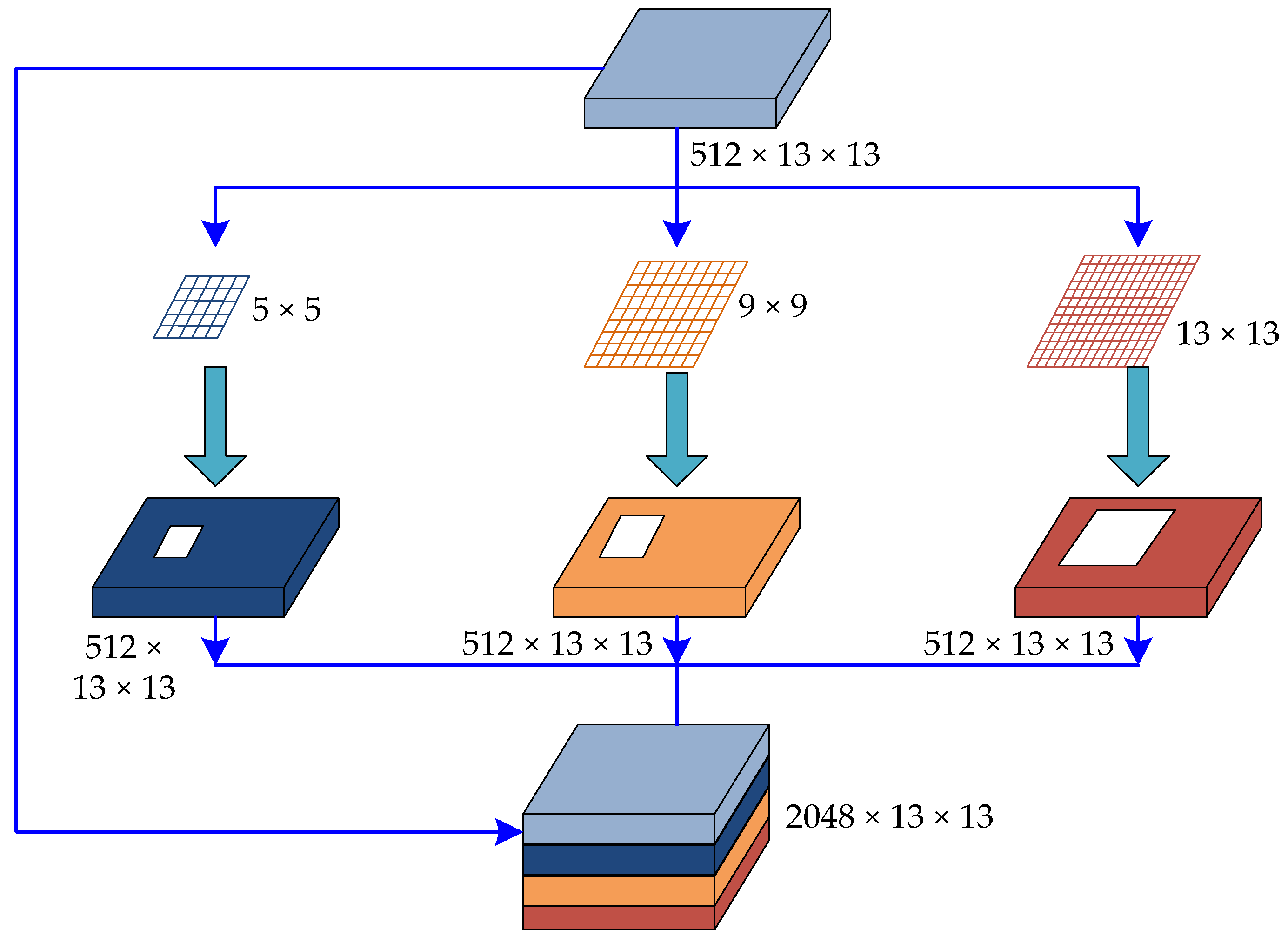
3.2. Structure of SPP-Networks
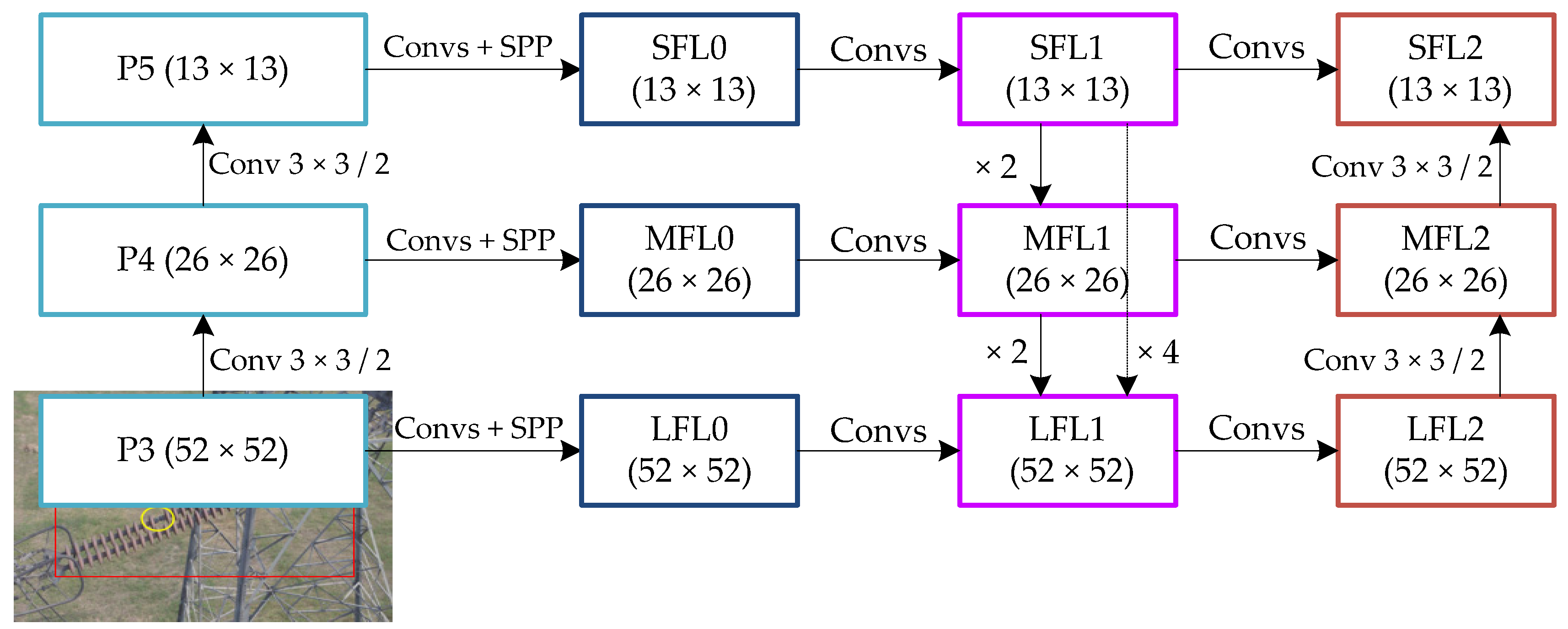
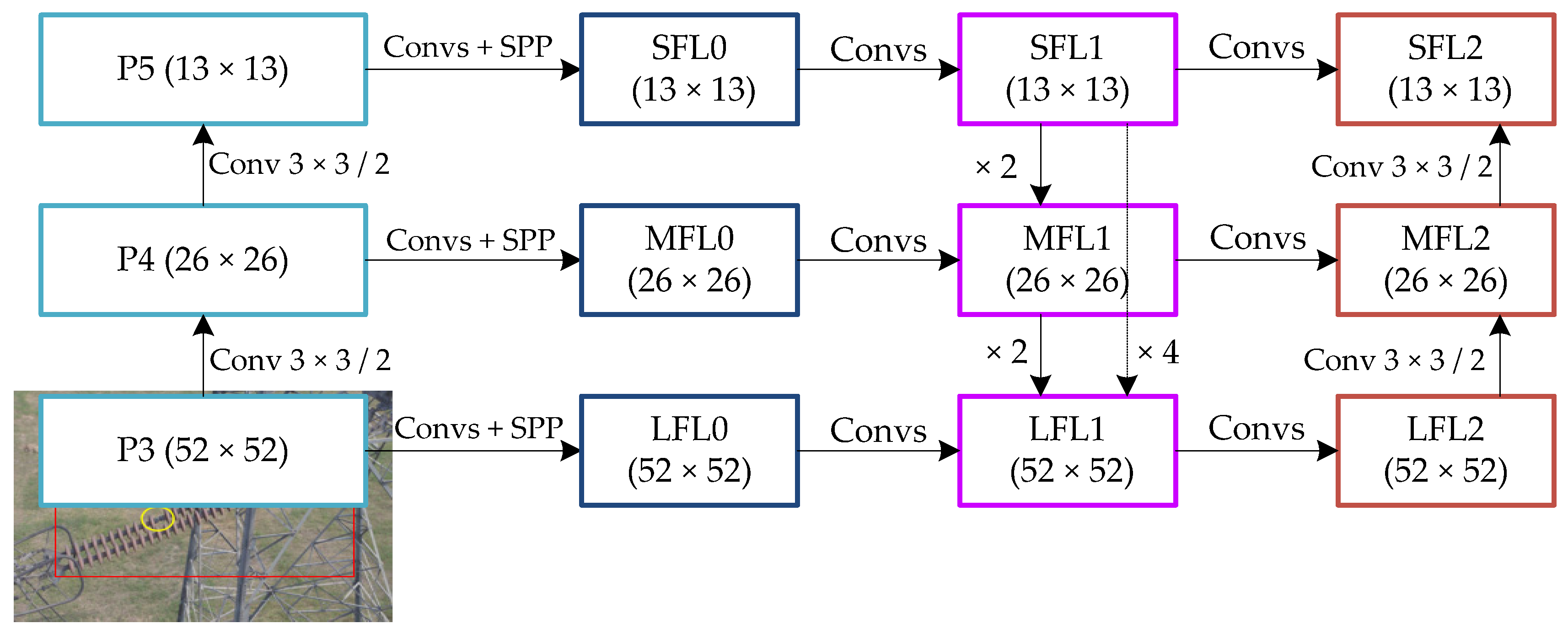
3.3. Feature Pyramid Network of the Improved YOLOv3
3.4. Loss Function of the Improved YOLOv3
4. Experiments Results and Discussion
4.1. Dataset Preparation
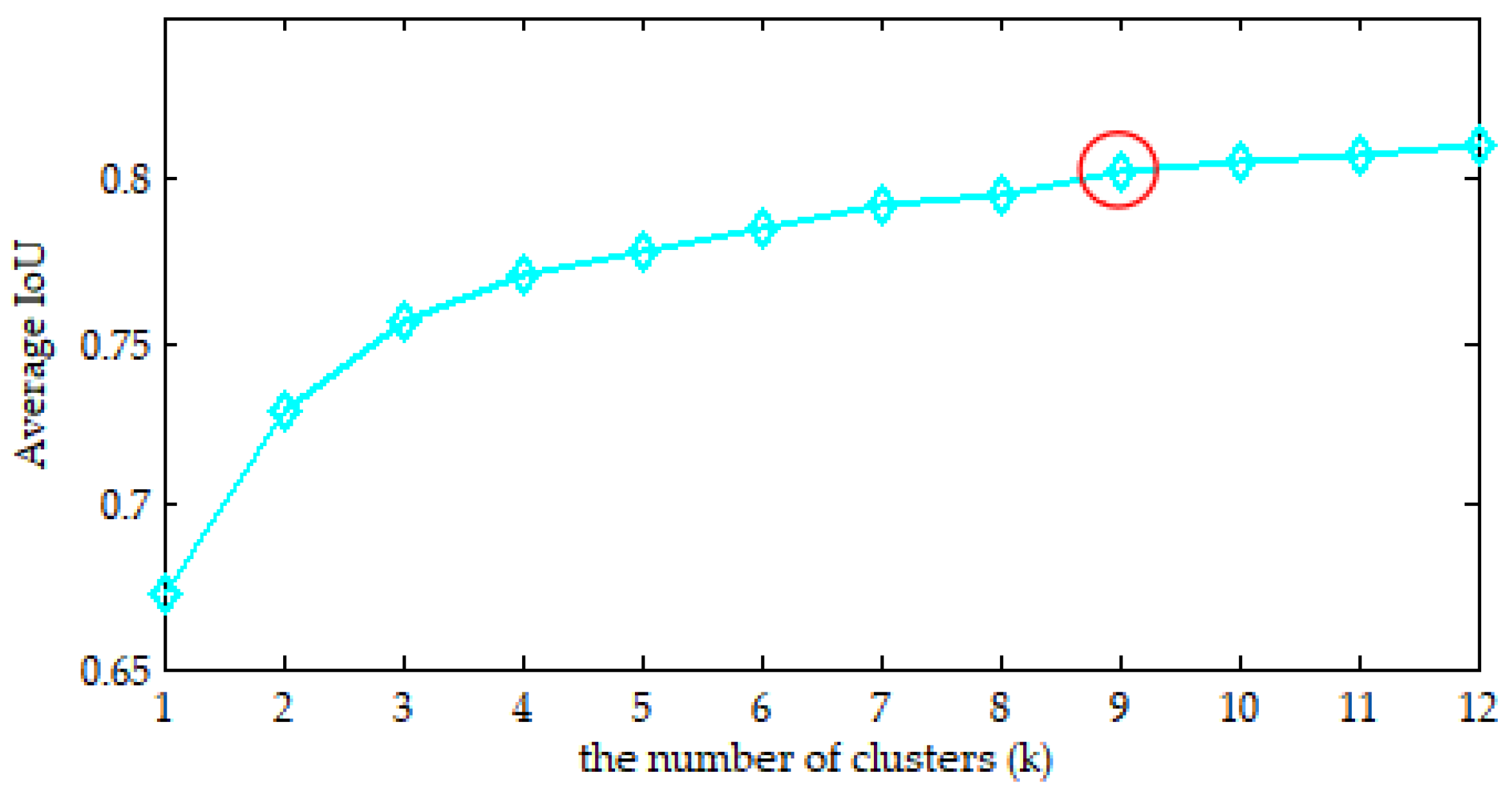
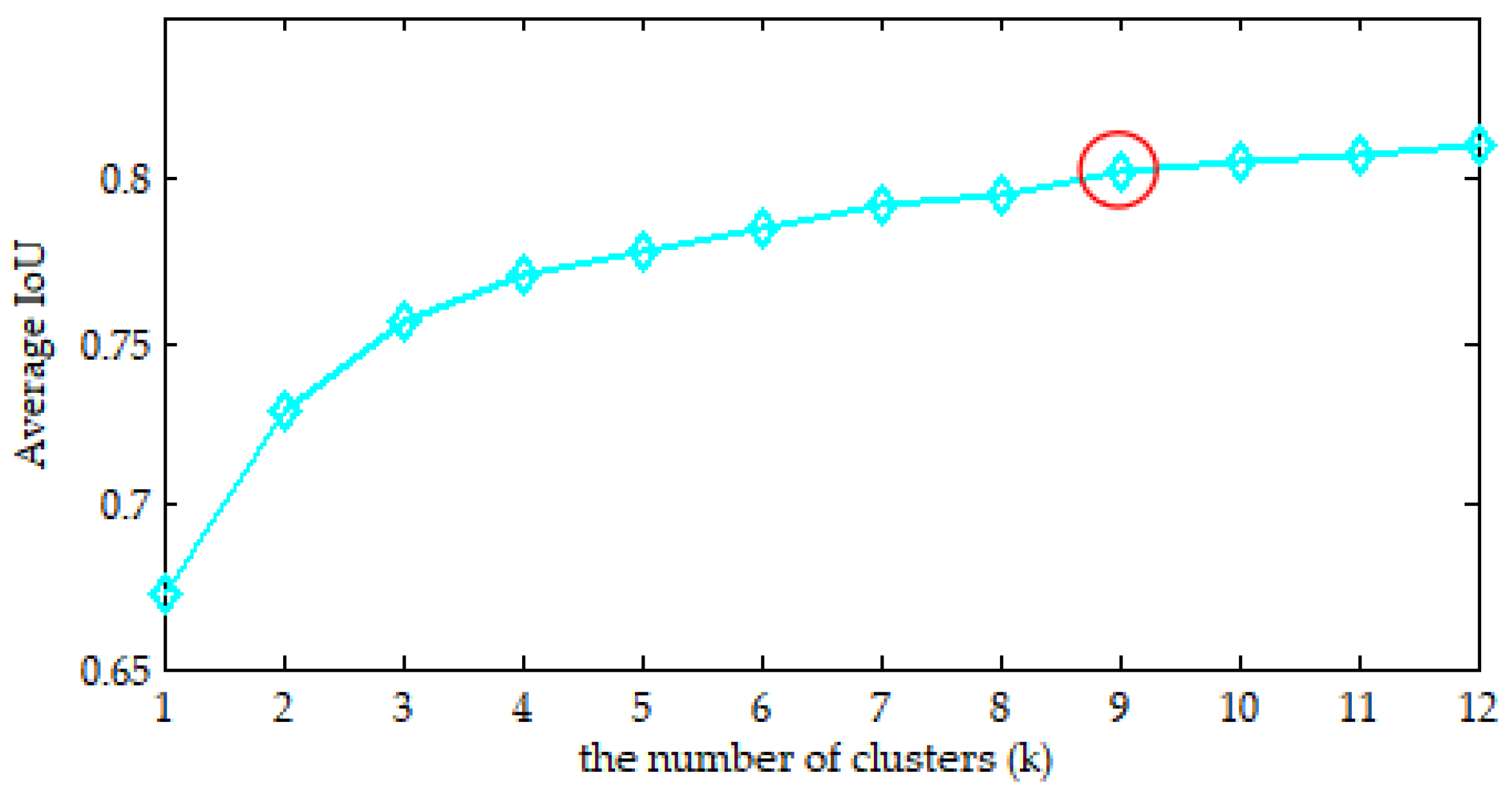
4.2. Anchor Boxes Clustering
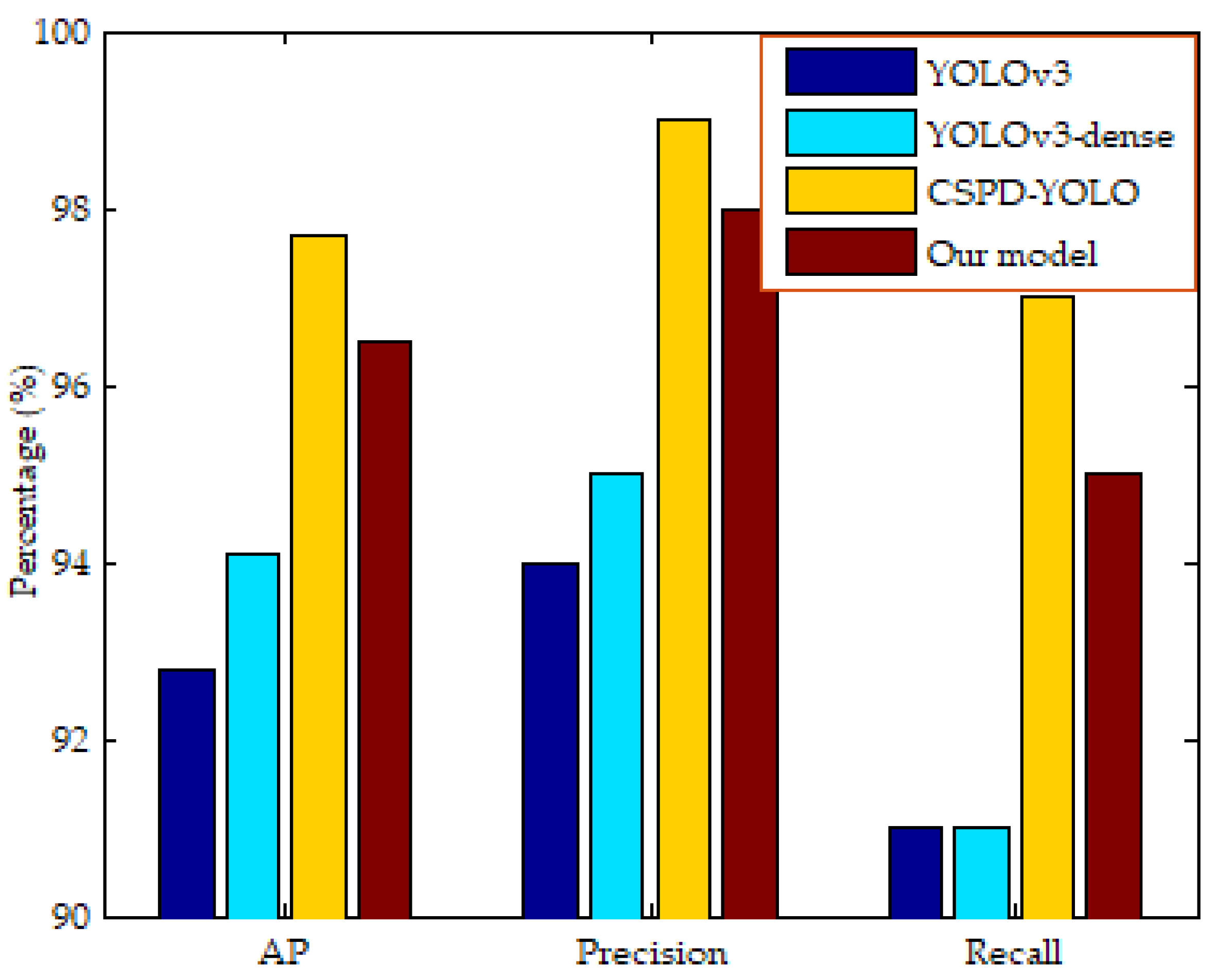
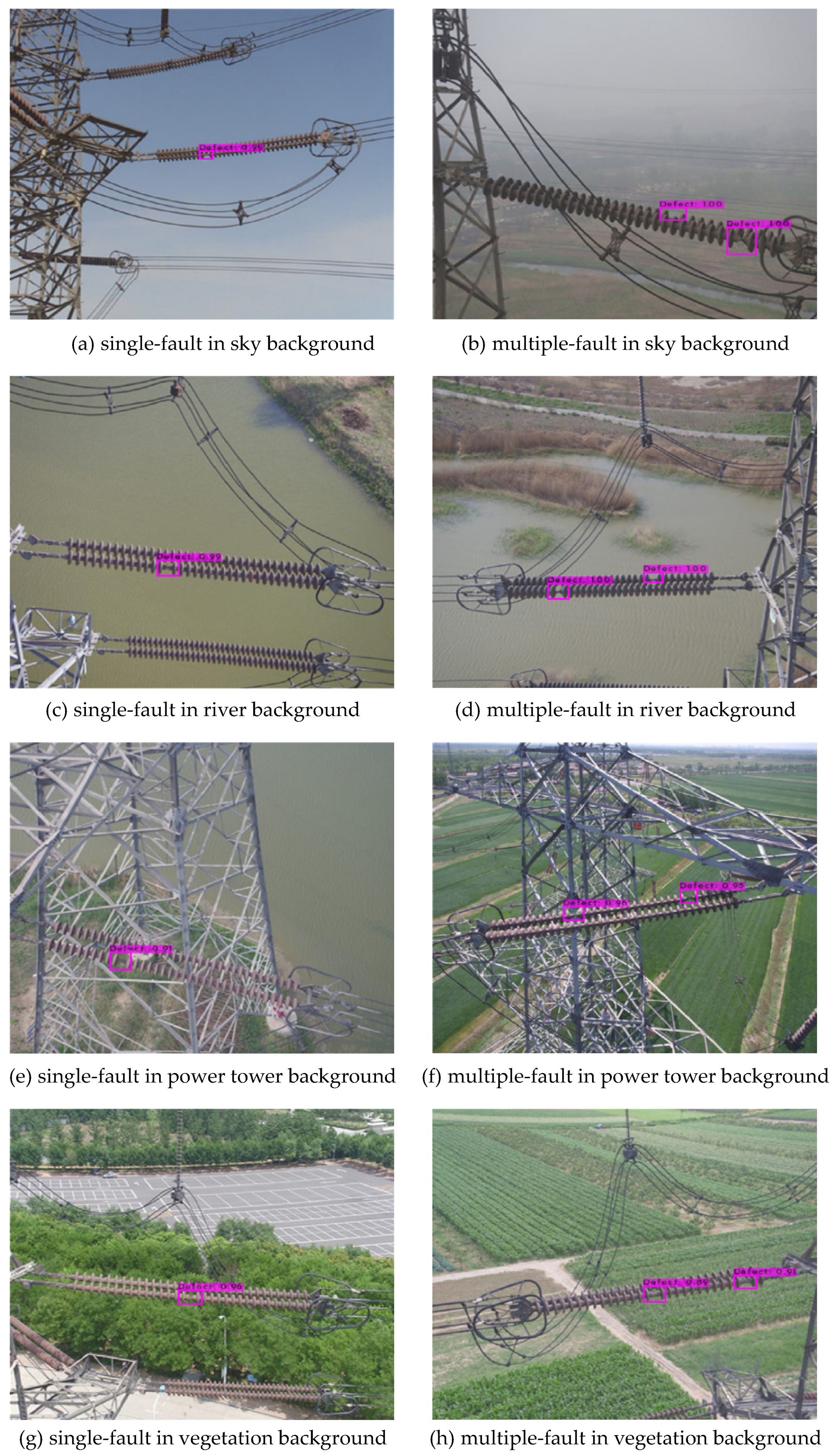
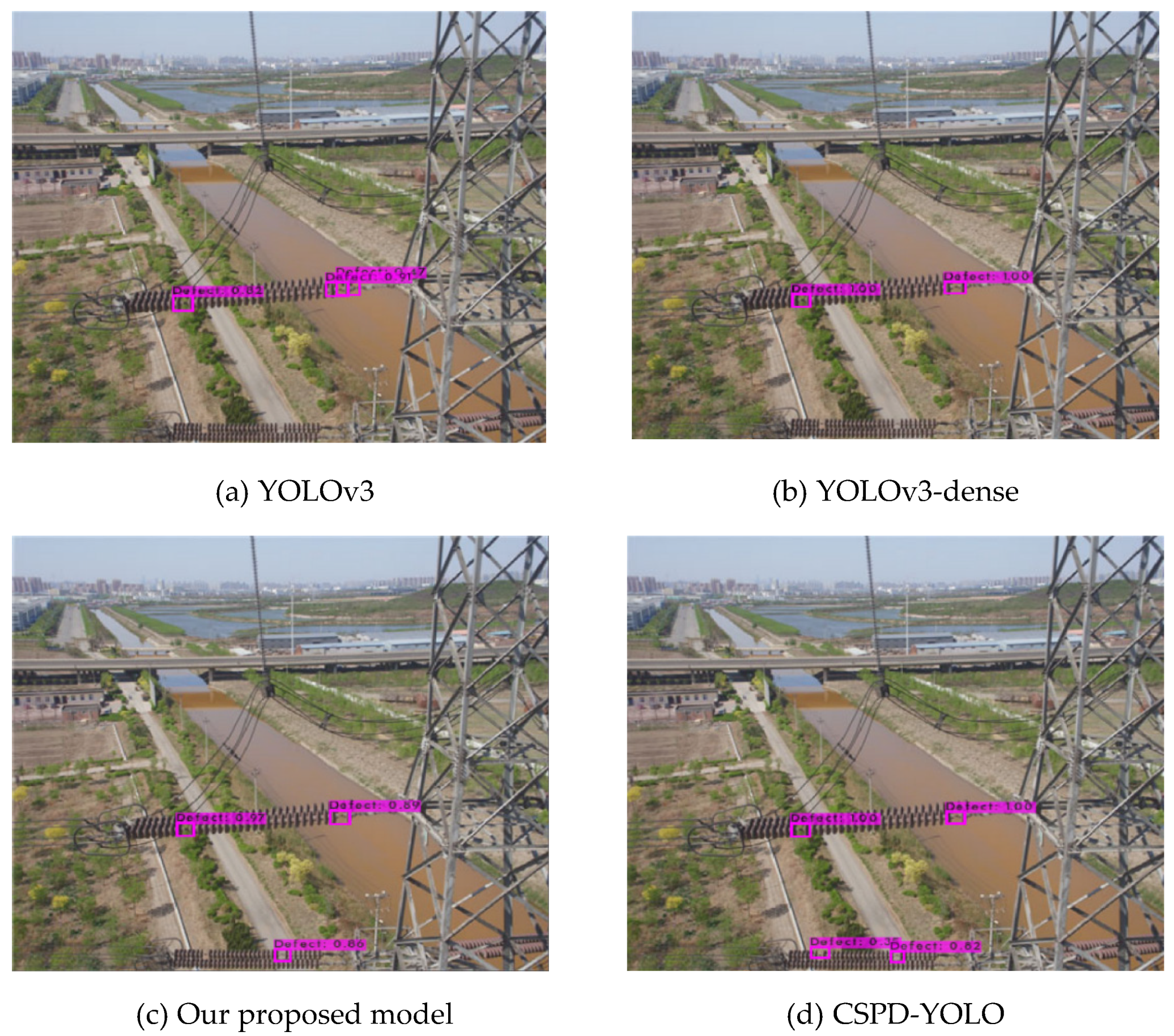
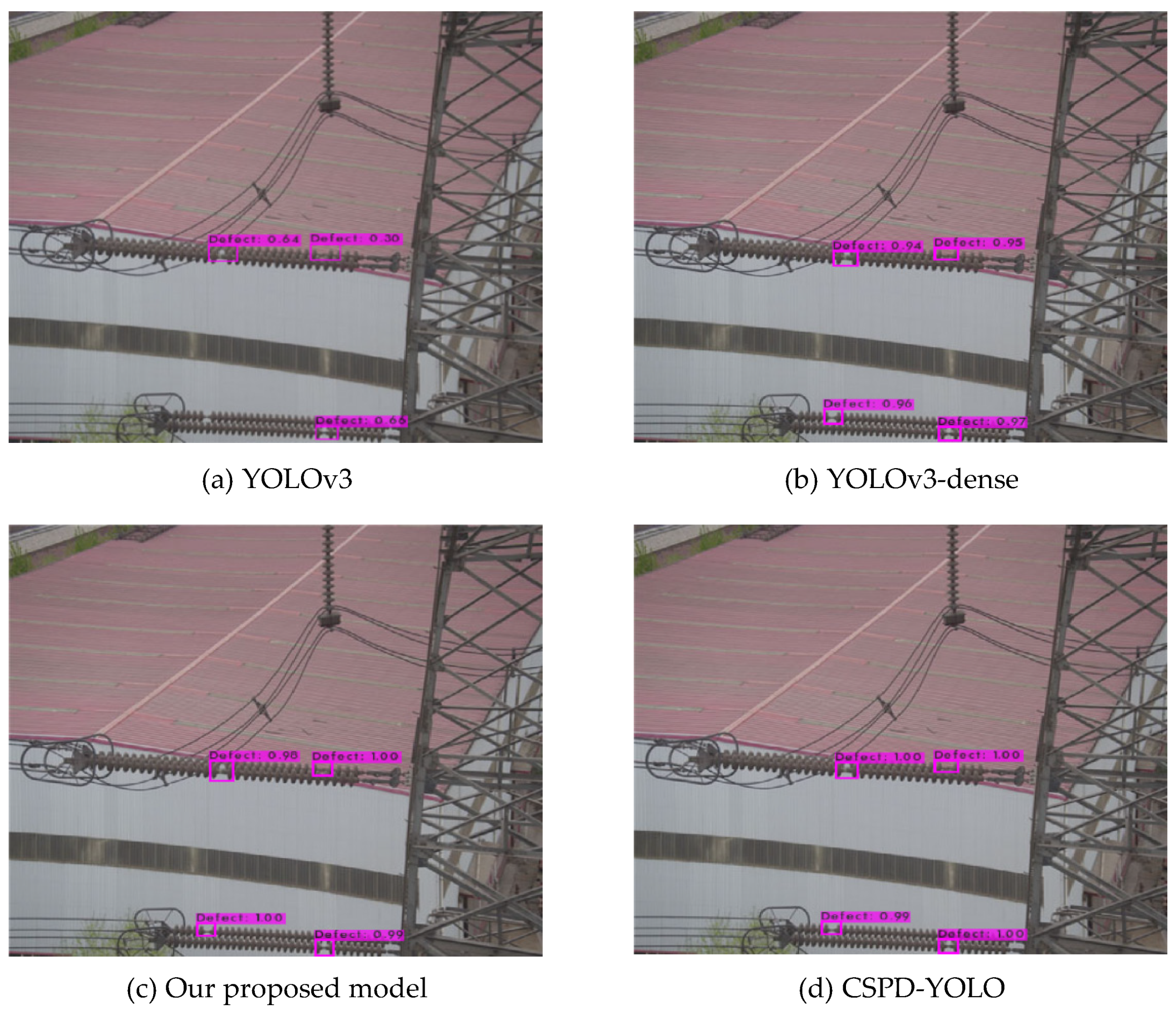
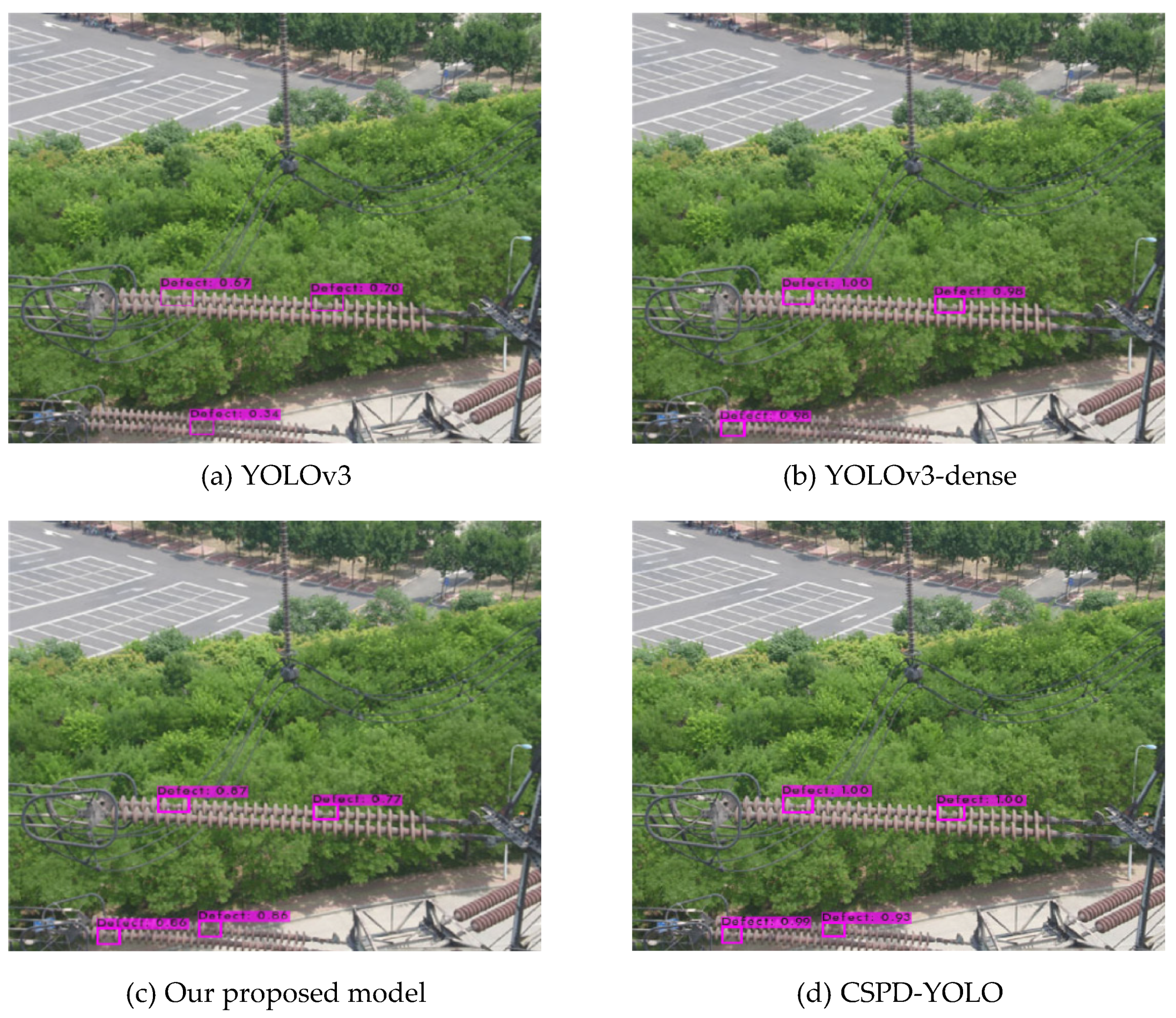
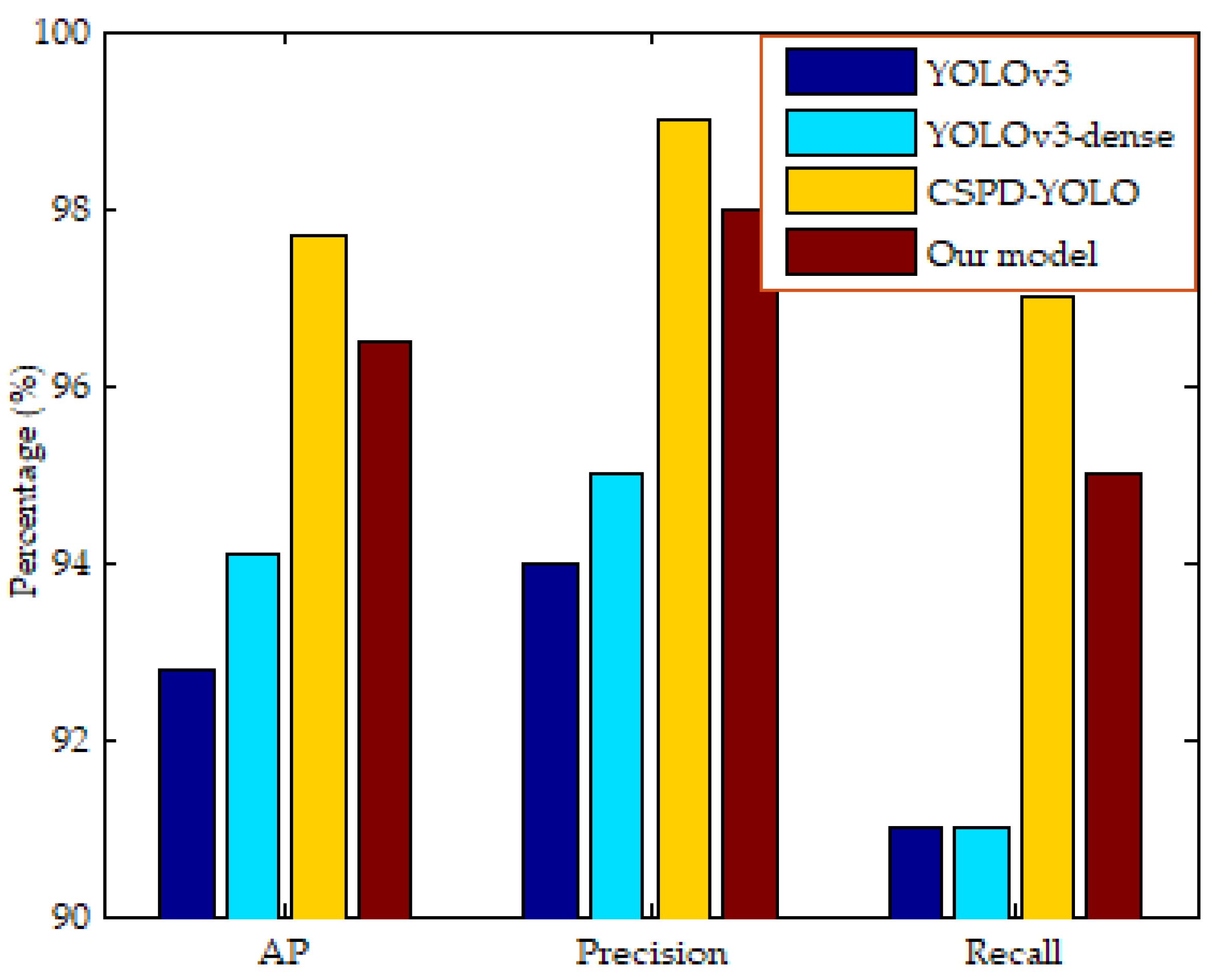
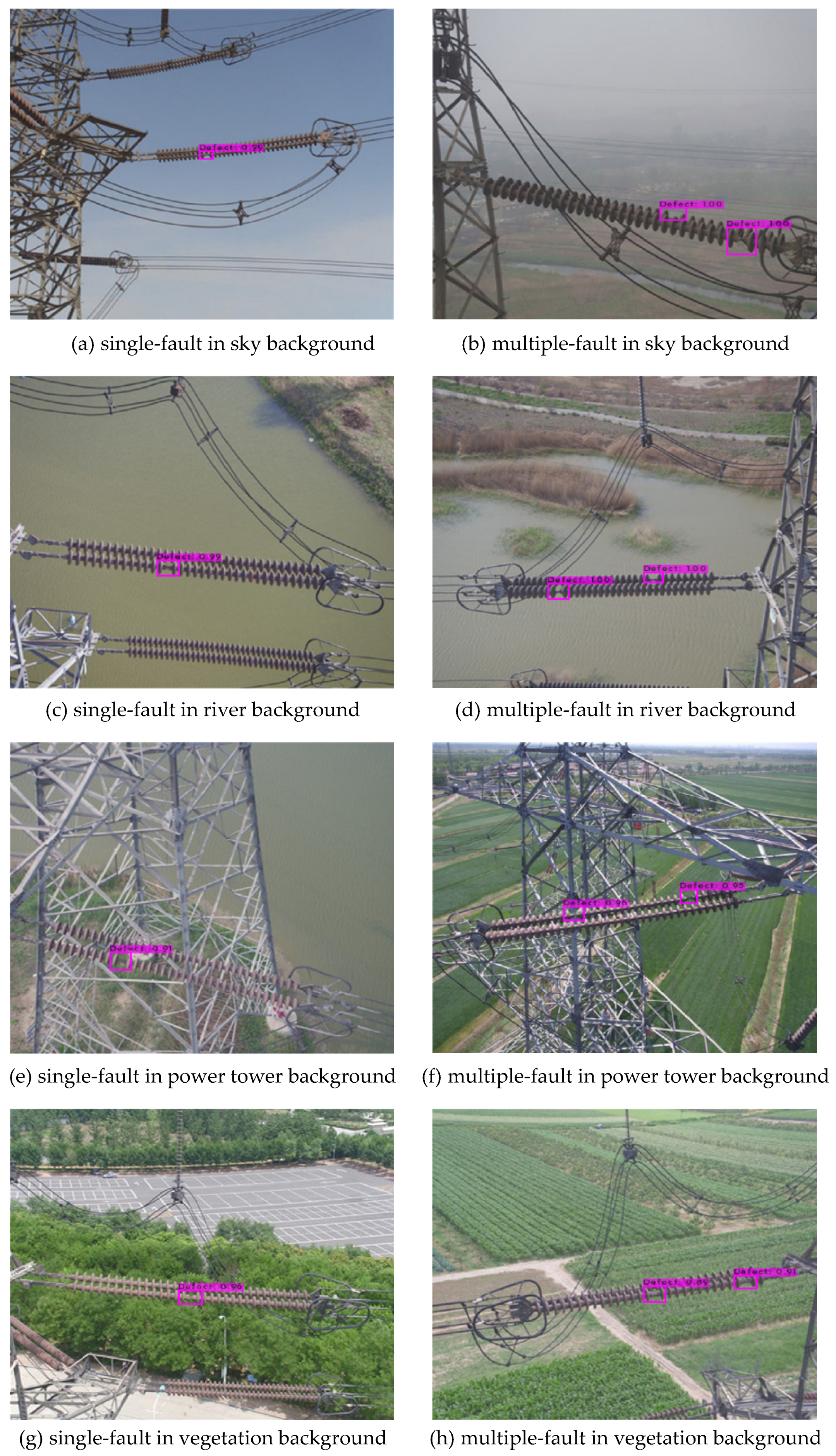
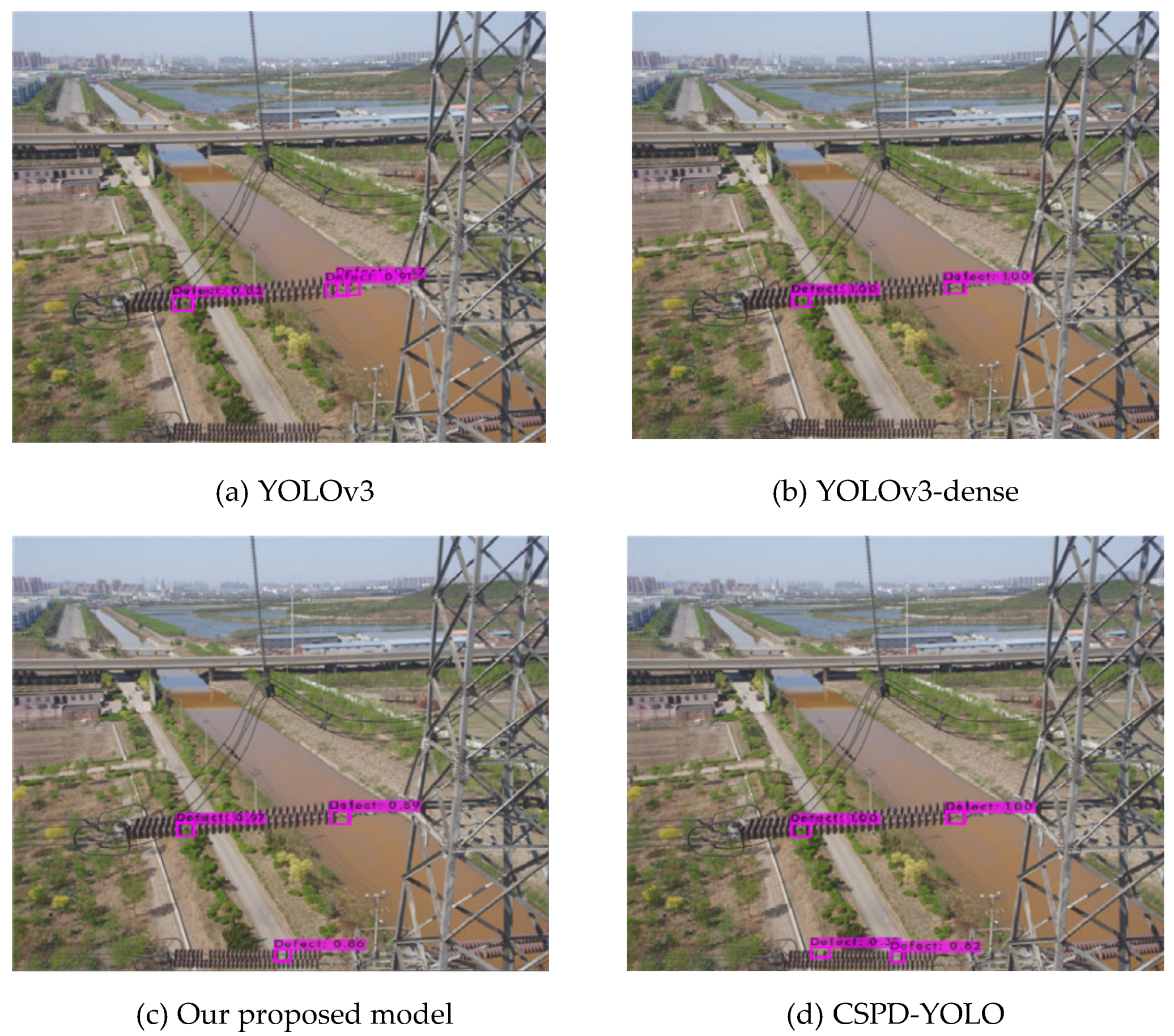
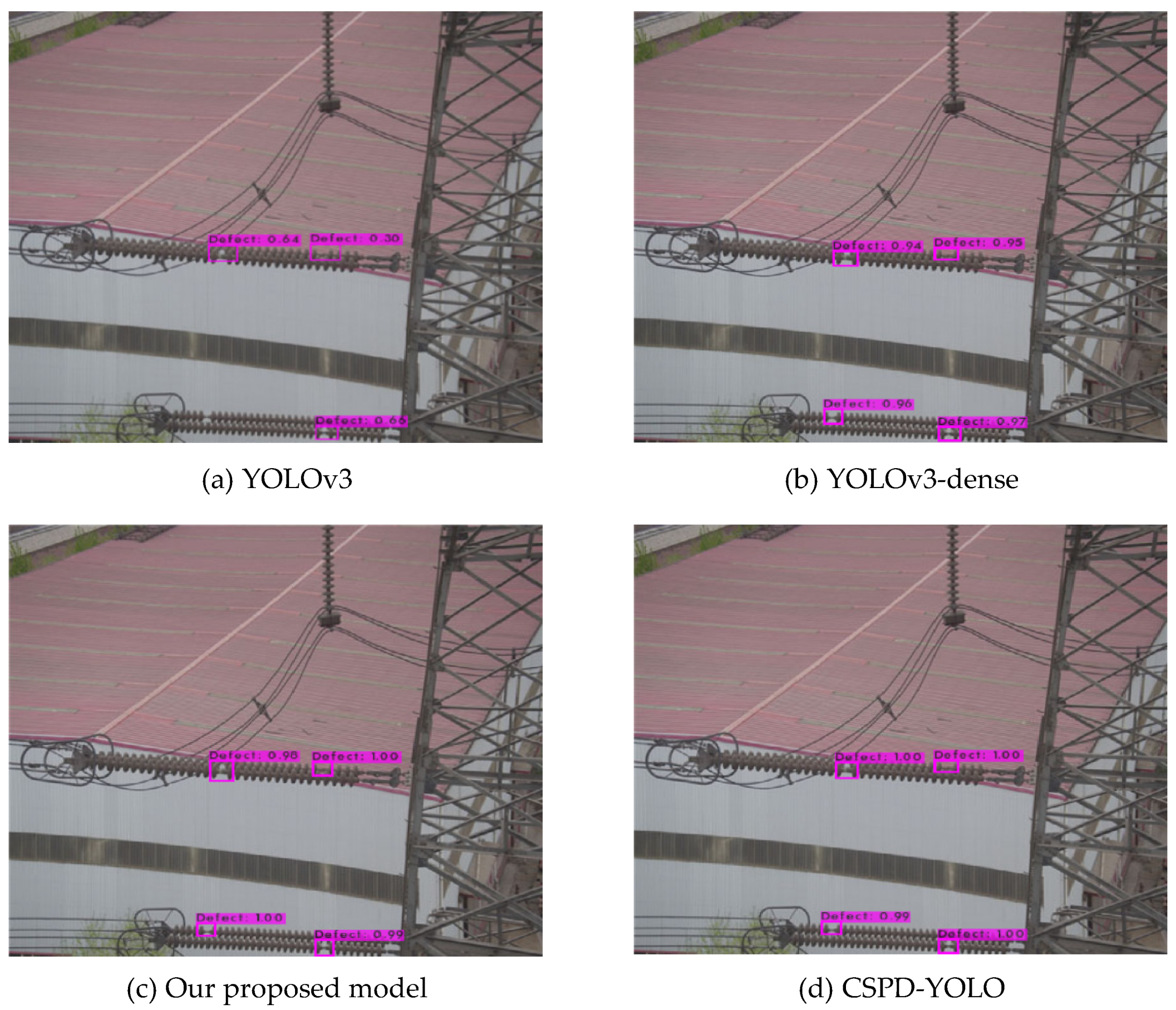
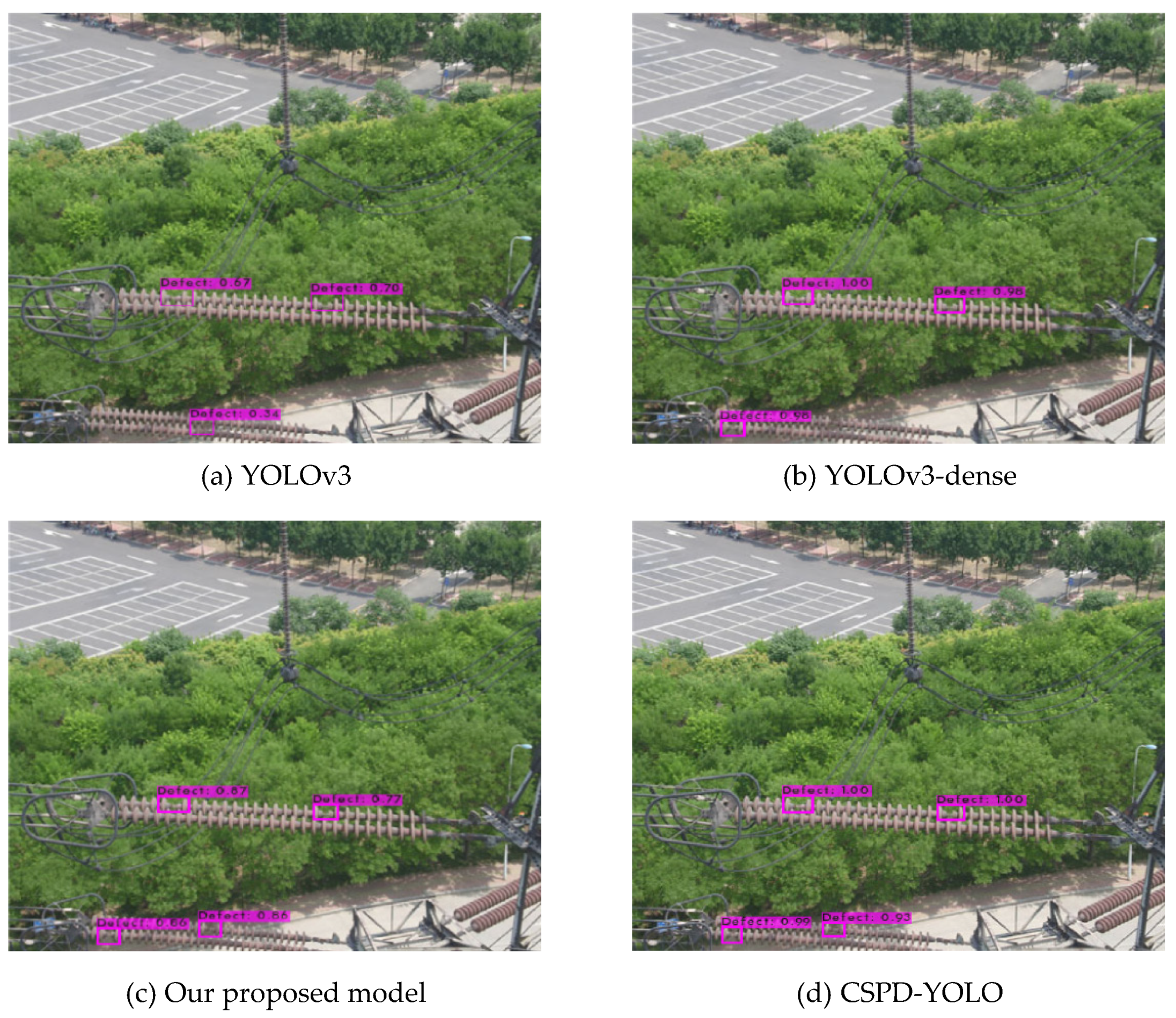
4.3. Quantitative and Qualitative Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, Z.; Zhen, Z.; Zhang, L.; Qi, Y.; Kong, Y.; Zhang, K. Insulator Detection Method in Inspection Image Based on Improved Faster R-CNN. Energies 2019, 12, 1204. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, V.N.; Jenssen, R.; Roverso, D. Automatic Autonomous Vision-Based Power Line Inspection: A Review of Current Status and the Potential Role of Deep Learning. Int. J. Electr. Power Energy Syst. 2018, 99, 107–120. [Google Scholar] [CrossRef] [Green Version]
- Zhai, Y.; Wang, D.; Zhang, M.; Wang, J.; Guo, F. Fault Detection of Insulator Based on Saliency and Adaptive Morphology. Multimed. Tools Appl. 2017, 76, 12051–12064. [Google Scholar] [CrossRef]
- Siddiqui, Z.A.; Park, U. A Drone Based Transmission Line Components Inspection System with Deep Learning Technique. Energies 2020, 13, 3348. [Google Scholar] [CrossRef]
- Han, J.; Yang, Z.; Xu, H.; Hu, G.; Zhang, C.; Li, H.; Lai, S.; Zeng, H. Search Like an Eagle: A Cascaded Model for Insulator Missing Faults Detection in Aerial Images. Energies 2020, 13, 713. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhang, W.; Li, P.; Ning, Y.; Suo, C. A Method for Autonomous Navigation and Positioning of UAV Based on Electric Field Array Detection. Sensors 2021, 21, 1146. [Google Scholar] [CrossRef]
- Rahman, E.; Zhang, Y.; Ahmad, S.; Ahmad, H.; Jobaer, S. Autonomous Vision-Based Primary Distribution Systems Porcelain Insulators Inspection Using UAVs. Sensors 2021, 21, 974. [Google Scholar] [CrossRef]
- Ma, Y.; Li, Q.; Chu, L.; Zhou, Y.; Xu, C. Real-Time Detection and Spatial Localization of Insulators for UAV Inspection Based on Binocular Stereo Vision. Remote Sens. 2021, 13, 230. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, N.; Wang, L. Localization of Multiple Insulators by Orientation Angle Detection and Binary Shape Prior Knowledge. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 3421–3428. [Google Scholar] [CrossRef]
- Liao, S.; An, J. A Robust Insulator Detection Algorithm Based on Local Features and Spatial Orders for Aerial Images. IEEE Geosci. Remote Sens. Lett. 2014, 12, 963–967. [Google Scholar] [CrossRef]
- Wang, W.; Wang, Y.; Han, J.; Yue, L. Recognition and Drop-Off Detection of Insulator Based on Aerial Image. In Proceedings of the International Symposium on Computational Intelligence & Design, Hangzhou, China, 10–11 December 2016; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Cheng, H.; Zhai, Y.; Chen, R.; Wang, D.; Dong, Z.; Wang, Y. Self-Shattering Defect Detection of Glass Insulators Based on Spatial Features. Energies 2019, 12, 543. [Google Scholar] [CrossRef] [Green Version]
- Zhai, Y.; Chen, R.; Yang, Q.; Li, X.; Zhao, Z. Insulator Fault Detection Based On Spatial Morphological Features of Aerial Images. IEEE Access 2018, 6, 35316–35326. [Google Scholar] [CrossRef]
- Huang, X.; Shang, E.; Xue, J.; Ding, H. A Multi-Feature Fusion-Based Deep Learning for Insulator Image Identification and Fault Detection. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Ge, C.; Wang, J.; Wang, J.; Qi, Q.; Liao, J. Towards Automatic Visual Inspection: A Weakly Supervised Learning Method for Industrial Applicable Object Detection. Comput. Ind. 2020, 121, 103232. [Google Scholar] [CrossRef]
- Shi, C.; Huang, Y. Cap-Count Guided Weakly Supervised Insulator Cap Missing Detection in Aerial Images. IEEE Sens. J. 2020, 21, 685–691. [Google Scholar] [CrossRef]
- Sadykova, D.; Pernebayeva, D.; Bagheri, M.; James, A. IN-YOLO: Real-time Detection of Outdoor High Voltage Insulators Using UAV Imaging. IEEE Trans. Power Del. 2019, 35, 1599–1601. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Z.; Yang, X.; Luo, N.; Zhao, Y.; Zhou, G. Insulator Defect Recognition Based on Faster R-CNN. In Proceedings of the 2020 International Conference on Computer, Information and Telecommunication Systems (CITS), Hangzhou, China, 5–7 October 2020. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 July 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Wen, Q.; Luo, Z.; Chen, R.; Yang, Y.; Li, G. Deep Learning Approaches on Defect Detection in High Resolution Aerial Images of Insulators. Sensors 2021, 21, 1033. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.; Liu, X. An Intelligent Recognition System for Insulator String Defects Based on Dimension Correction and Optimized Faster R-CNN. Electr. Eng. 2020, 103, 541–549. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single Shot Multibox Detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. Yolov3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.; Liao, H. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Yolov5 Code Repository. Available online: https://gitee.com/atari/ultralytics_yolov5 (accessed on 20 January 2021).
- Wang, H.; Hu, Z.; Guo, Y.; Yang, Z.; Zhou, F.; Xu, P. A Real-Time Safety Helmet Wearing Detection Approach Based on CSYOLOv3. Appl. Sci. 2020, 10, 6732. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, J.; Gao, F.; Hu, P.; Xu, L.; Zhang, J.; Yu, Y.; Xue, J.; Li, J. Detection and Recognition for Fault Insulator Based on Deep Learning. In Proceedings of the 11th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Beijing, China, 13–15 October 2018. [Google Scholar] [CrossRef]
- Ling, Z.; Zhang, D.; Qiu, R.; Jin, Z.; Zhang, Y.; He, X.; Liu, H. An Accurate and Real-Time Self-Blast Glass Insulator Location Method Based on Faster R-CNN and U-Net with Aerial Images. CSEE J. Power Energy Syst. 2019, 5, 474–482. [Google Scholar] [CrossRef]
- Wang, H.; Yang, G.; Li, E.; Tian, Y.; Liang, Z. High-Voltage Power Transmission Tower Detection Based on Faster R-CNN and YOLO-V3. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–29 July 2019. [Google Scholar] [CrossRef]
- Zhang, P.; Zhong, Y.; Li, X. SlimYOLOv3: Narrower, Faster and Better for Real-Time UAV Applications. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Korea, 27–28 October 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef] [Green Version]
- Wu, W.; Li, Q. Machine Vision Inspection of Electrical Connectors Based on Improved Yolo-v3. IEEE Access 2020, 8, 166184–166196. [Google Scholar] [CrossRef]
- Miao, X.; Liu, X.; Chen, J.; Zhuang, S.; Fan, J.; Jiang, H. Insulator Detection in Aerial Images for Transmission Line Inspection Using Single Shot Multibox Detector. IEEE Access 2019, 7, 9945–9956. [Google Scholar] [CrossRef]
- Wang, X.; Xu, T.; Zhang, J.; Chen, S. SO-YOLO Based WBC Detection with Fourier Ptychographic Microscopy. IEEE Access 2018, 6, 51566–51576. [Google Scholar] [CrossRef]
- Adou, M.; Xu, H.; Chen, G. Insulator Faults Detection Based on Deep Learning. In Proceedings of the International Conference on Anti-Counterfeiting, Security, and Identification, Xiamen, China, 25–27 October 2019. [Google Scholar] [CrossRef]
- Han, J.; Yang, Z.; Zhang, Q.; Chen, C.; Li, H.; Lai, S.; Hu, G.; Xu, C.; Xu, H.; Wang, D. A Method of Insulator Faults Detection in Aerial Images for High-Voltage Transmission Lines Inspection. Appl. Sci. 2019, 9, 2009. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Wu, Y.; Liu, J.; Sun, Z. Improved YOLOv3 Network for Insulator Detection in Aerial Images with Diverse Background Interference. Electronics 2021, 10, 771. [Google Scholar] [CrossRef]
- Liu, C.; Wu, Y.; Liu, J.; Sun, Z.; Xu, H. Insulator Faults Detection in Aerial Images from High-Voltage Transmission Lines Based on Deep Learning Model. Appl. Sci. 2021, 11, 4647. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity Mappings in Deep Residual Networks. In Proceedings of the 14th European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Liu, Y.; Qing, Y.; Wang, C.; Yao, R. Detection of Insulator Defects with Improved ResNeSt and Region Proposal Network. IEEE Access 2020, 8, 184841–184850. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Laurens, V.D.M.; Weinberger, K.Q. Densely Connected Convolutional Networks. arXiv 2016, arXiv:1608.06993. [Google Scholar]
- Zhu, Y.; Newsam, S. DenseNet for Dense Flow. In Proceedings of the 2017 24th IEEE International Conference on Image Processing, Beijing, China, 17–20 September 2017; pp. 790–794. [Google Scholar] [CrossRef]
- Yuan, X.; Xia, J.; Wu, J.; Shi, J.; Deng, L. Low Altitude Small UAV Detection Based on YOLO Model. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, J. DC-SPP-YOLO: Dense Connection and Spatial Pyramid Pooling Based YOLO for Object Detection. arXiv 2019, arXiv:1903.08589. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.J.; Kim, P.K.; Chung, Y.S.; Choi, D.H. Performance Enhancement of YOLOv3 by Adding Prediction Layers with Spatial Pyramid Pooling for Vehicle Detection. In Proceedings of the 2018 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Auckland, New Zealand, 27–30 November 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar] [CrossRef]
- Kim, K.J.; Kim, P.K.; Chung, Y.S.; Choi, D.H. Multi-Scale Detector for Accurate Vehicle Detection in Traffic Surveillance Data. IEEE Access 2019, 7, 78311–78319. [Google Scholar] [CrossRef]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path Aggregation Network for Instance Segmentation. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Project of the Dark-Net Framework. Available online: https://github.com/AlexeyAB/darknet (accessed on 25 October 2020).
- Insulator Data Set—Chinese Power Line Insulator Dataset (CPLID). Available online: https://github.com/InsulatorData/InsulatorDataSet (accessed on 15 September 2020).
- Project of the LabelImg Tool. Available online: https://github.com/tzutalin/labelImg (accessed on 25 October 2020).
- Wu, T.; Wang, W.; Yu, L.; Xie, B.; Yin, W.; Wang, H. Insulator Defect Detection Method for Lightweight YOLOV3. Comput. Eng. 2019, 45, 275–280. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Configuration |
|---|---|
| CPU | Intel(R) Core(TM) i9-9900K, CPU/3.60 GHz |
| GPU | Nvidia GeForce GTX 3080/10 GB |
| Accelerated Environment | CUDA 11.1, cuDNN 8.0.5 |
| Visual Studio Framework | Open CV 3.4.0, Visual Studio 2017 |
| Operating System | Windows 10 |
| Training Framework | Dark-net |
| Images Number | Training Set | Testing Set | Image Size | Faults Number |
|---|---|---|---|---|
| 864 | 576 | 288 | 416 × 416 | 1172 |
| Ground Truth | Predicted Result | Definition |
|---|---|---|
| 1 | 1 | TP |
| 1 | 0 | FN |
| 0 | 1 | FP |
| 0 | 0 | TN |
| Networks | AP | Precision | Recall | Memory Usages |
|---|---|---|---|---|
| YOLOv3 | 92.8% | 94% | 91% | 240 MB |
| YOLOv3-dense | 94.1% | 95% | 91% | 248 MB |
| CSPD-YOLO | 97.7% | 99% | 97% | 265 MB |
| Our improved YOLOv3 | 96.5% | 98% | 95% | 225 MB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Liu, C.; Wu, Y.; Xu, H.; Sun, Z. An Improved Method Based on Deep Learning for Insulator Fault Detection in Diverse Aerial Images. Energies 2021, 14, 4365. https://doi.org/10.3390/en14144365
Liu J, Liu C, Wu Y, Xu H, Sun Z. An Improved Method Based on Deep Learning for Insulator Fault Detection in Diverse Aerial Images. Energies. 2021; 14(14):4365. https://doi.org/10.3390/en14144365
Chicago/Turabian StyleLiu, Jingjing, Chuanyang Liu, Yiquan Wu, Huajie Xu, and Zuo Sun. 2021. "An Improved Method Based on Deep Learning for Insulator Fault Detection in Diverse Aerial Images" Energies 14, no. 14: 4365. https://doi.org/10.3390/en14144365
APA StyleLiu, J., Liu, C., Wu, Y., Xu, H., & Sun, Z. (2021). An Improved Method Based on Deep Learning for Insulator Fault Detection in Diverse Aerial Images. Energies, 14(14), 4365. https://doi.org/10.3390/en14144365