
Frequency Stability Issues and Research Opportunities in Converter Dominated Power System



Abstract
:1. Introduction
2. Previous Studies
3. Frequency Stability in Power Systems
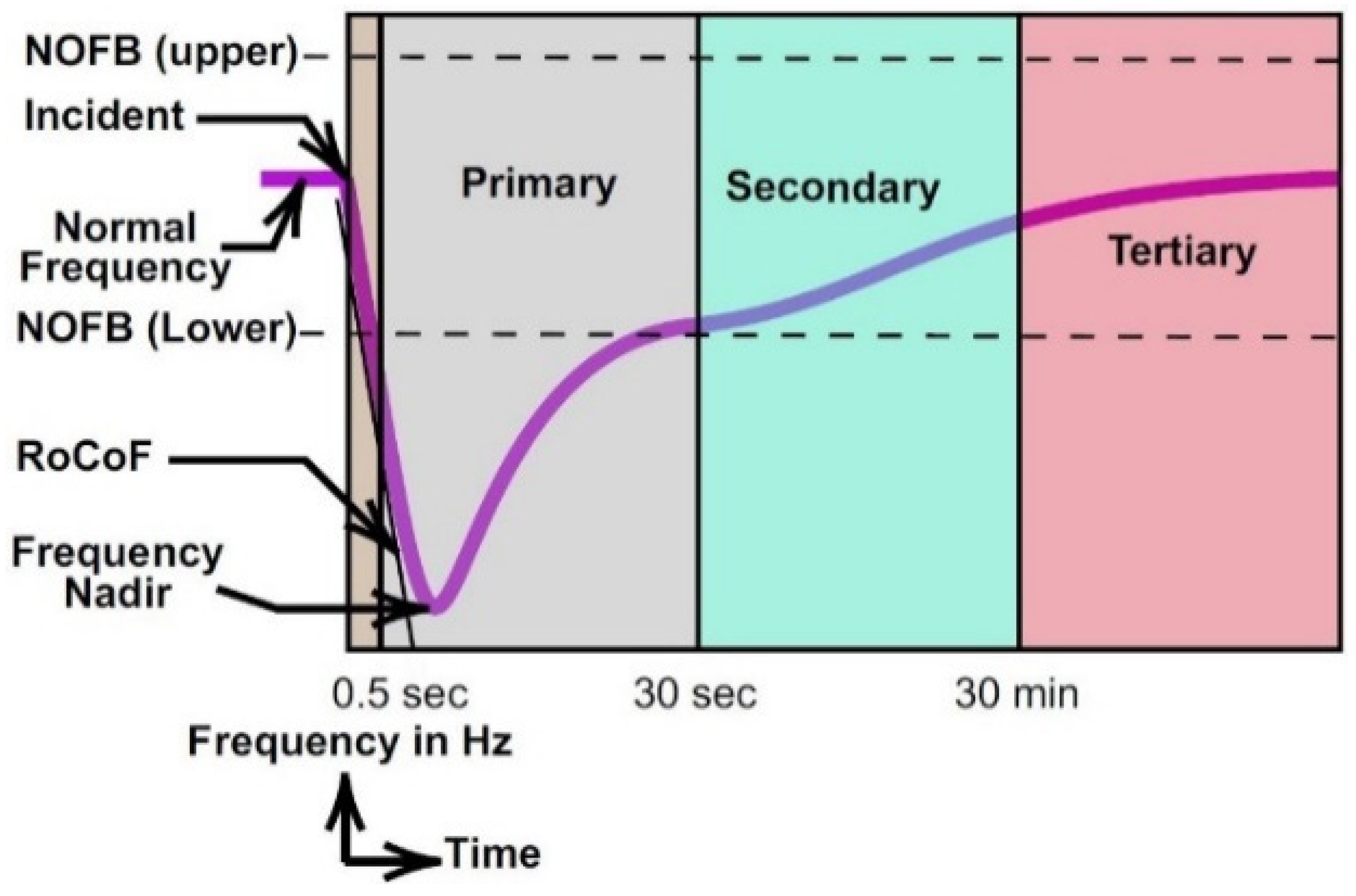
3.1. Frequency Response and Regulation Techniques

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country | Primary Control | Secondary Control | Others | References |
|---|---|---|---|---|
| Great Britain | Active power of the generation unit increases/decreases within 10 to 30 s of the frequency deviation. | Active power of the generation unit increases/decreases within 30 s to 30 min of the frequency deviation. | High-frequency response is in action, which acts within 10 s of the frequency deviation. | [67,68] |
| Germany | The generation unit can achieve 100% of active power changes within 30 s and maintain frequency for the next 15 min. | The generation unit is able to achieve 100% of active power changes within 5 min. | Minutes reserve is adopted, which responds within 15 min. The power supply must be delivered for at least 7.5 min of the specific quarter hours. | [69,70,71] |
| China | Active power of the generation unit increases/decreases within 3 to 15 s of the frequency deviation. | Active power of the generation unit increases/decreases for a maximum of 1 min. | Power plants are capable of setting and enforcing automatic control for the active power and power ramp rate (e.g., an integrated wind power plant contains 1 min and 10 min ramp rates). During the period of severing deviation, power plants can instantly control their generation as instructed by the TSO. | [78,82,83] |
| France/Italy | 50% of active power increases/decreases within 15 s and 100% within 30 s, continued for a maximum of 15 min. | Activated within 30 s and continued for a maximum of 15 min. | Tertiary control is adopted, which activates along with secondary control, and continues for a maximum of 15 min. | [69,70] |
| Denmark | A droop of 18,000 MW/Hz is maintained. | Reserve control is adopted, where the system is regulated within 2 to 3 min of 0.01 Hz frequency deviation. If the deviation becomes higher than 0.05 Hz, 50% of system reserve is distributed within 5 s, and 100% is distributed within 30 s. | [69,75,76,77] | |
| India | The generation unit must provide a response to changes of 5% droop (i.e., 40% of active power changes with a frequency change of 1 Hz). | A 30 s delay is provided to activate the secondary reserves, which are entirely activated within 15 min and continued for a maximum of 30 min. | A tertiary control mechanism is available as a supportive method of secondary control. Tertiary control is fully activated within 15 min and continued for a maximum period of 60 min. Moreover, UFLS is implemented with three thresholds (e.g., adopted thresholds in the south of India are 49.5 Hz and 0.2 Hz/s, 49.3 Hz and 0.2 Hz/s, and 49.3 Hz and 0.3 Hz/s). | [84,85,86,87] |
3.2. Case Studies
3.2.1. Power System Blackout in Great Britain on 28 May 2008
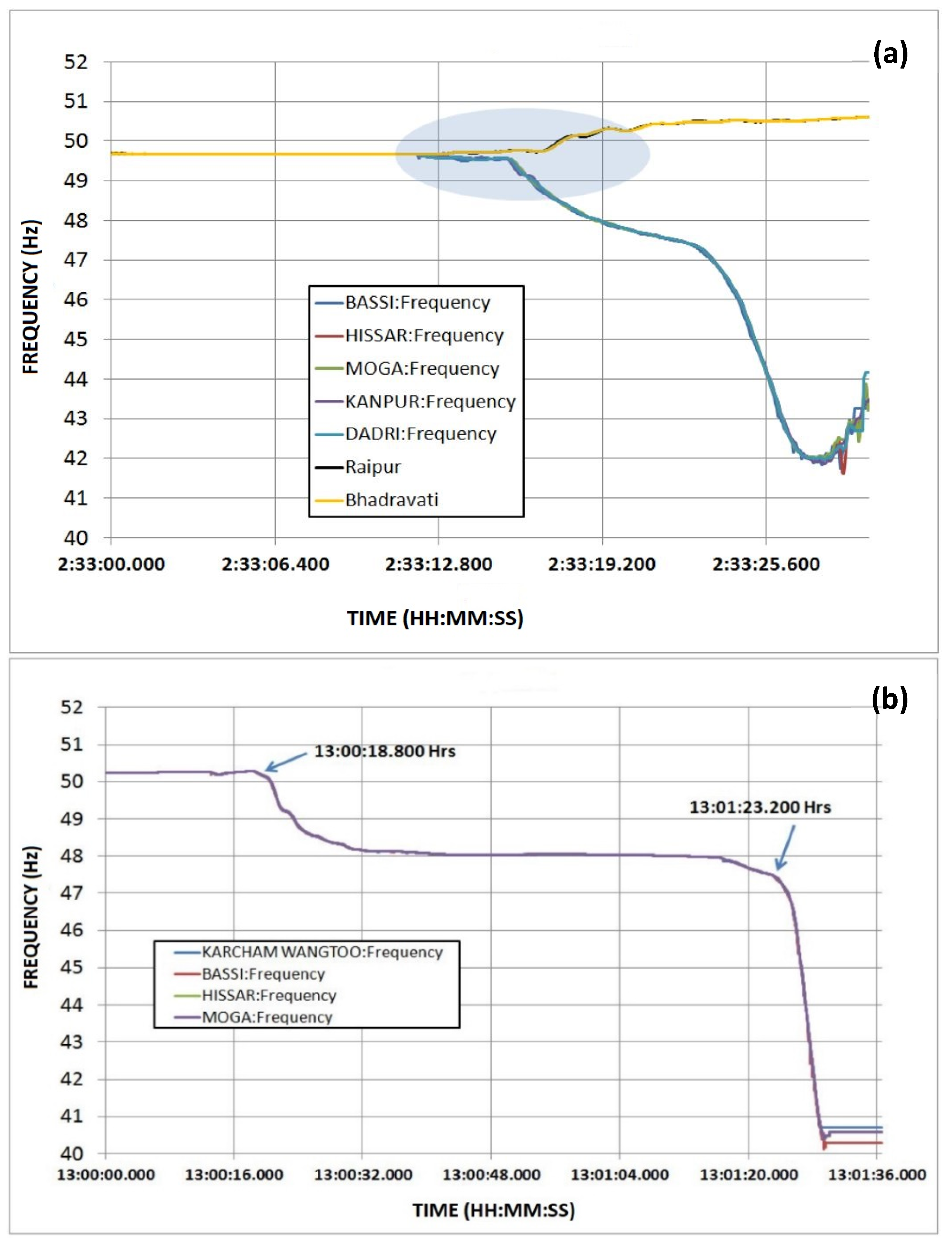
3.2.2. Power System Blackout in Northern and Eastern India on 30 and 31 July 2012
3.2.3. Series of Blackouts in Venezuela in 2019
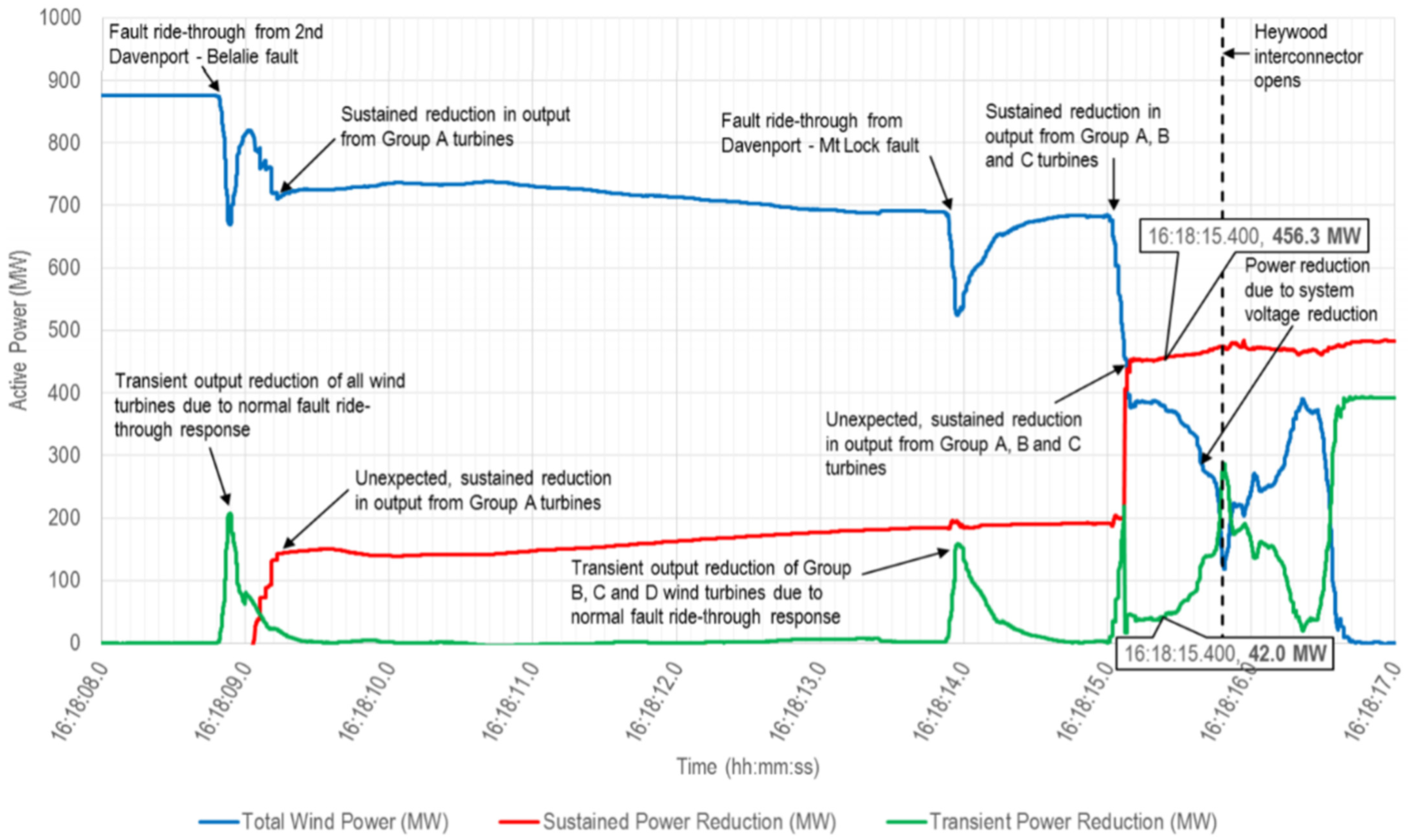
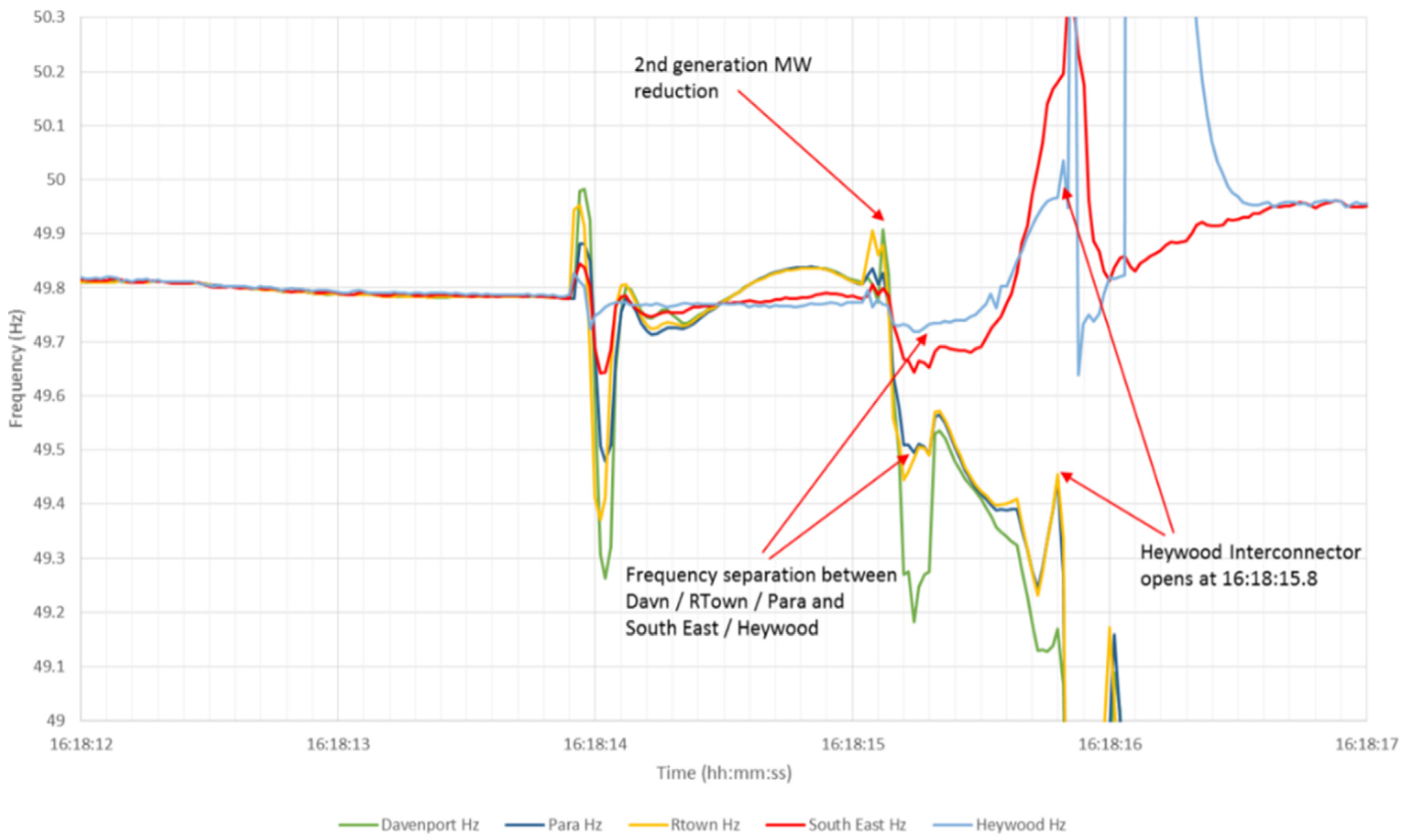
3.2.4. Power System Blackouts in Australia
3.2.5. Power System Blackouts in California, USA
3.2.6. Inferences
4. Open Issues of Frequency Instability and the Way Forward
4.1. Issues of PEC-Based Technologies in a Power System
4.2. Future Studies
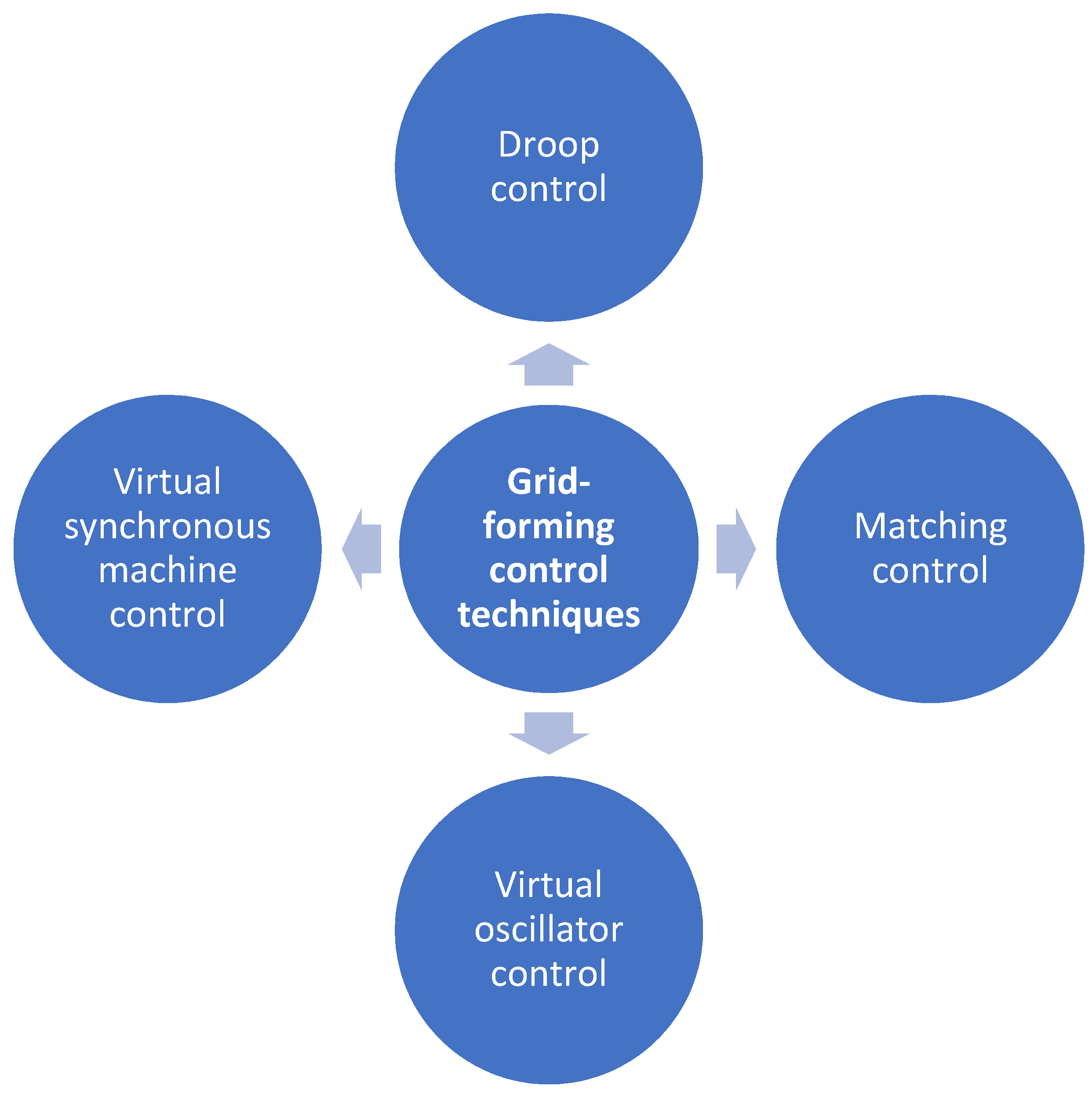
4.2.1. Grid-Forming Power Converters
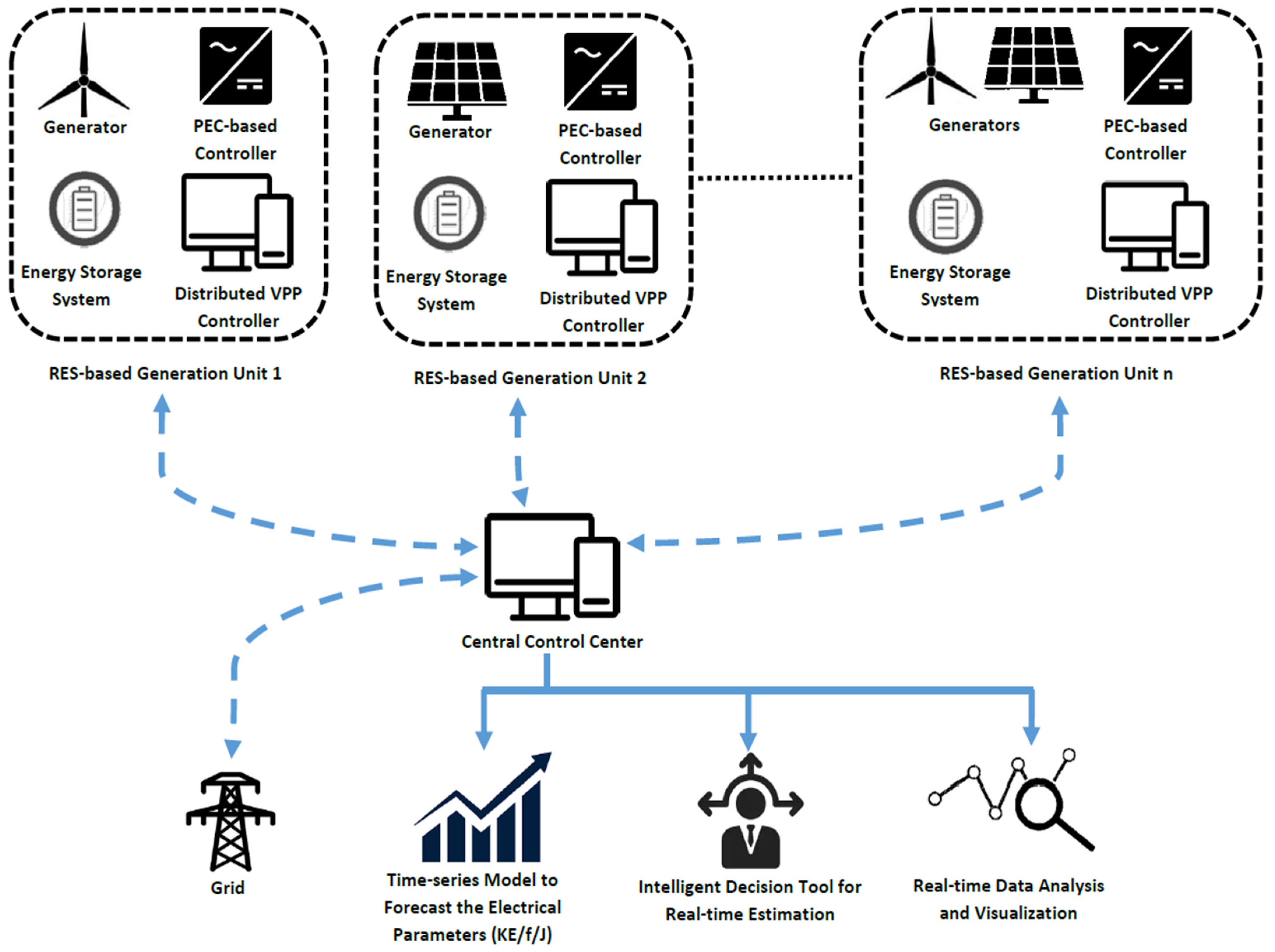
4.2.2. VPP/VSG with a New Dimension
4.2.3. Other Solutions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Verzijlbergh, R.; De Vries, L.; Dijkema, G.; Herder, P. Institutional challenges caused by the integration of renewable energy sources in the European electricity sector. Renew. Sustain. Energy Rev. 2017, 75, 660–667. [Google Scholar] [CrossRef] [Green Version]
- Shrestha, A.; Rajbhandari, Y.; Khadka, N.; Bista, A.; Marahatta, A.; Dahal, R.; Mallik, J.K.; Thapa, A.; Hayes, B.P.; Korba, P. Status of Micro/Mini-Grid Systems in a Himalayan Nation: A Comprehensive Review. IEEE Access 2020, 8, 120983–120998. [Google Scholar] [CrossRef]
- Shrestha, A.; Rana, L.B.; Singh, A.; Phuyal, S.; Ghimire, A.; Giri, R.; Kattel, R.; Karki, K.; Jha, S.K. Assessment of electricity excess in an isolated hybrid energy system: A case study of a Dangiwada village in rural Nepal. Energy Procedia 2019, 160, 76–83. [Google Scholar] [CrossRef]
- Hossain, J.; Mahmud, A. Renewable Energy Integration: Challenges and Solutions; Springer Singapore Heidelberg: Singapore, 2014. [Google Scholar] [CrossRef]
- Energy, U. The Challenge of Sustainability. World Energy Assessment, UNDP-WEC. Available online: https://www.osti.gov/etdeweb/biblio/20228512 (accessed on 2 October 2021).
- Hou, Q.; Du, E.; Zhang, N.; Kang, C. Impact of High Renewable Penetration on the Power System Operation Mode: A Data-Driven Approach. IEEE Trans. Power Syst. 2019, 35, 731–741. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Frequency Control; Springer: Berlin/Heidelberg, Germany, 2009; Volume 85. [Google Scholar]
- Hatziargyriou, N.; Milanović, J.; Rahmann, C.; Ajjarapu, V.; Cañizares, C.; Erlich, I.; Hill, D.; Hiskens, I.; Kamwa, I.; Pal, B.; et al. Stability Definitions and Characterization of Dynamic Behavior in Systems with High Penetration of Power Electronic Interfaced Technologies; Technical Report PES-TR77, Power System Dynamic Performance Committee; IEEE Power and Energy Society: Piscataway, NJ, USA, 2020. [Google Scholar]
- Peng, Q.; Jiang, Q.; Yang, Y.; Liu, T.; Wang, H.; Blaabjerg, F. On the stability of power electronics-dominated systems: Challenges and potential solutions. IEEE Trans. Ind. Appl. 2019, 55, 7657–7670. [Google Scholar] [CrossRef]
- Hatziargyriou, N.; Milanovic, J.; Rahmann, C.; Ajjarapu, V.; Canizares, C.; Erlich, I.; Hill, D.; Hiskens, I.; Kamwa, I.; Pal, B. Definition and Classification of Power System Stability Revisited & Extended. IEEE Trans. Power Syst. 2020, 36, 3271–3281. [Google Scholar]
- Kroposki, B.; Johnson, B.; Zhang, Y.; Gevorgian, V.; Denholm, P.; Hodge, B.-M.; Hannegan, B. Achieving a 100% renewable grid: Operating electric power systems with extremely high levels of variable renewable energy. IEEE Power Energy Mag. 2017, 15, 61–73. [Google Scholar] [CrossRef]
- Wang, Y.; Silva-Saravia, H.; Pulgar-Painemal, H. Actuator placement for enhanced grid dynamic performance: A machine learning approach. IEEE Trans. Power Syst. 2019, 34, 3119–3128. [Google Scholar] [CrossRef]
- Pei, W.; Chen, Y.; Sheng, K.; Deng, W.; Du, Y.; Qi, Z.; Kong, L. Temporal-spatial analysis and improvement measures of Chinese power system for wind power curtailment problem. Renew. Sustain. Energy Rev. 2015, 49, 148–168. [Google Scholar] [CrossRef]
- Khadka, N.; Paudel, R.; Adhikary, B.; Bista, A.; Sharma, S.; Shrestha, A. Transient Stability in Renewable Energy Penetrated Power Systems: A Review. In Proceedings of the RESSD 2020 International Conference on Role of Energy for Sustainable Social Development in ‘New Normal’ Era, Kathmandu, Nepal, 28–29 December 2020. [Google Scholar]
- Ju, W.; Sun, K.; Yao, R. Simulation of cascading outages using a power-flow model considering frequency. IEEE Access 2018, 6, 37784–37795. [Google Scholar] [CrossRef]
- Othman, M.H.; Mokhlis, H.; Mubin, M.; Talpur, S.; Ab Aziz, N.F.; Dradi, M.; Mohamad, H. Progress in control and coordination of energy storage system-based VSG: A review. IET Renew. Power Gener. 2019, 14, 177–187. [Google Scholar] [CrossRef]
- Vandenberghe, F.; Grebe, E.; Klaar, D.; Kleinekorte, K.; Rodriguez, J.; Erven, H.; Tassan, L. FINAL REPORT of the Investigation Committee on the 28 September 2003 Blackout in Italy. UCTE Tech. Rep. 2004. Available online: https://eepublicdownloads.entsoe.eu/clean-documents/pre2015/publications/ce/otherreports/20040427_UCTE_IC_Final_report.pdf (accessed on 8 February 2021).
- Bevrani, H.; Hiyama, T. Intelligent Automatic Generation Control; CRC Press: New York, NY, USA, 2017. [Google Scholar]
- Bevrani, H.; Hiyama, T. On load–frequency regulation with time delays: Design and real-time implementation. IEEE Trans. Energy Convers. 2009, 24, 292–300. [Google Scholar] [CrossRef]
- Milla, F.; Duarte-Mermoud, M.A.; Aguila-Camacho, N. Hierarchical mpc secondary control for electric power system. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef] [Green Version]
- Chamorro, H.R.; Sanchez, A.C.; Pantoja, A.; Zelinka, I.; Gonzalez-Longatt, F.; Sood, V.K. A network control system for hydro plants to counteract the non-synchronous generation integration. Int. J. Electr. Power Energy Syst. 2019, 105, 404–419. [Google Scholar] [CrossRef] [Green Version]
- Hyndman, R.J.; Liu, X.A.; Pinson, P. Visualizing big energy data: Solutions for this crucial component of data analysis. IEEE Power Energy Mag. 2018, 16, 18–25. [Google Scholar] [CrossRef] [Green Version]
- Bonfiglio, A.; Oliveri, A.; Procopio, R.; Delfino, F.; Denegri, G.; Invernizzi, M.; Storace, M. Improving power grids transient stability via model predictive control. In Proceedings of the 2014 Power Systems Computation Conference, Wroclaw, Poland, 18–22 August 2014; pp. 1–7. [Google Scholar]
- Cheng, M.; Sami, S.S.; Wu, J. Benefits of using virtual energy storage system for power system frequency response. Appl. Energy 2017, 194, 376–385. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.-J.; Kim, J.-H.; Kim, C.-H.; Kim, S.-K.; Kim, E.-S.; Kim, D.-U.; Mehmood, K.K.; Khan, S.U. Coordinated control algorithm for distributed battery energy storage systems for mitigating voltage and frequency deviations. IEEE Trans. Smart Grid 2015, 7, 1713–1722. [Google Scholar] [CrossRef]
- Kumar, P.S. Transient stability enhancement of power system using TCSC. Int. J. Electr. Comput. Eng. 2012, 2, 317. [Google Scholar] [CrossRef]
- Wang, M.-H.; Chen, H.-C. Transient stability control of multimachine power systems using flywheel energy injection. IEE Proc. Gener. Transm. Distrib. 2005, 152, 589–596. [Google Scholar] [CrossRef] [Green Version]
- Haque, M. Improvement of first swing stability limit by utilizing full benefit of shunt FACTS devices. IEEE Trans. Power Syst. 2004, 19, 1894–1902. [Google Scholar] [CrossRef]
- Murali, D.; Rajaram, M.; Reka, N. Comparison of FACTS devices for power system stability enhancement. Int. J. Comput. Appl. 2010, 8, 30–35. [Google Scholar] [CrossRef]
- Guo, G.; Wang, Y.; Lim, K.-Y.; Gao, L. Robust nonlinear controller for power system transient stability enhancement with voltage regulation. IEE Proc. Gener. Transm. Distrib. 1996, 143, 407–412. [Google Scholar] [CrossRef]
- Teng, F.; Mu, Y.; Jia, H.; Wu, J.; Zeng, P.; Strbac, G. Challenges on primary frequency control and potential solution from EVs in the future GB electricity system. Appl. Energy 2017, 194, 353–362. [Google Scholar] [CrossRef]
- Liu, H.; Huang, K.; Wang, N.; Qi, J.; Wu, Q.; Ma, S.; Li, C. Optimal dispatch for participation of electric vehicles in frequency regulation based on area control error and area regulation requirement. Appl. Energy 2019, 240, 46–55. [Google Scholar] [CrossRef]
- Aghaei, J.; Alizadeh, M.-I.; Siano, P.; Heidari, A. Contribution of emergency demand response programs in power system reliability. Energy 2016, 103, 688–696. [Google Scholar] [CrossRef]
- Babahajiani, P.; Shafiee, Q.; Bevrani, H. Intelligent demand response contribution in frequency control of multi-area power systems. IEEE Trans. Smart Grid 2016, 9, 1282–1291. [Google Scholar] [CrossRef]
- Marahatta, A.; Rajbhandari, Y.; Shrestha, A.; Singh, A.; Gachhadar, A.; Thapa, A. Priority-based low voltage DC microgrid system for rural electrification. Energy Rep. 2021, 7, 43–51. [Google Scholar] [CrossRef]
- Behera, A.; Panigrahi, T.K.; Sahoo, A.K. A FO-PID Controlled Automatic Generation Control of Multi Area Power Systems Tuned by Harmony Search. Recent Adv. Electr. Electron. Eng. 2020, 13, 101–109. [Google Scholar] [CrossRef]
- Tripathy, S.; NAIR, P.C.; Rao, N. Automatic generation control with superconducting magnetic energy storage in power system. Electr. Mach. Power Syst. 1994, 22, 317–338. [Google Scholar] [CrossRef]
- Khamari, D.; Sahu, R.K.; Gorripotu, T.S.; Panda, S. Automatic generation control of power system in deregulated environment using hybrid TLBO and pattern search technique. Ain Shams Eng. J. 2019, 11, 553–573. [Google Scholar] [CrossRef]
- Xi, L.; Li, Y.; Huang, Y.; Lu, L.; Chen, J. A novel automatic generation control method based on the ecological population cooperative control for the islanded smart grid. Complexity 2018, 2018. [Google Scholar] [CrossRef]
- Ramakrishna, K.; Bhatti, T. Automatic generation control of single area power system with multi-source power generation. Proc. Inst. Mech. Eng. Part A J. Power Energy 2008, 222, 1–11. [Google Scholar] [CrossRef]
- Zeynelgil, H.; Demiroren, A.; Sengor, N. The application of ANN technique to automatic generation control for multi-area power system. Int. J. Electr. Power Energy Syst. 2002, 24, 345–354. [Google Scholar] [CrossRef]
- Nanda, J.; Kaul, B. Automatic generation control of an interconnected power system. Proc. Inst. Electr. Eng. 1978, 125, 385–390. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Padhan, S. A hybrid firefly algorithm and pattern search technique for automatic generation control of multi area power systems. Int. J. Electr. Power Energy Syst. 2015, 64, 9–23. [Google Scholar] [CrossRef]
- Cui, M.; Khodayar, M.; Chen, C.; Wang, X.; Zhang, Y.; Khodayar, M.E. Deep Learning-Based Time-Varying Parameter Identification for System-Wide Load Modeling. IEEE Trans. Smart Grid 2019, 10, 6102–6114. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Z.; Wang, J.; Zhao, D. Robust time-varying parameter identification for composite load modeling. IEEE Trans. Smart Grid 2017, 10, 967–979. [Google Scholar] [CrossRef]
- Hung, D.Q.; Mithulananthan, N.; Lee, K.Y. Determining PV penetration for distribution systems with time-varying load models. IEEE Trans. Power Syst. 2014, 29, 3048–3057. [Google Scholar] [CrossRef]
- Kiaei, I.; Lotfifard, S. Tube-based model predictive control of energy storage systems for enhancing transient stability of power systems. IEEE Trans. Smart Grid 2017, 9, 6438–6447. [Google Scholar] [CrossRef]
- Jin, L.; Kumar, R.; Elia, N. Model predictive control-based real-time power system protection schemes. IEEE Trans. Power Syst. 2009, 25, 988–998. [Google Scholar] [CrossRef]
- Ersdal, A.M.; Fabozzi, D.; Imsland, L.; Thornhill, N.F. Model predictive control for power system frequency control taking into account imbalance uncertainty. IFAC Proc. Vol. 2014, 47, 981–986. [Google Scholar] [CrossRef] [Green Version]
- Ball, S. Neural Network Predictive Control Applied to Power System Stability. In Intelligent Systems Design and Applications; Springer: Berlin/Heidelberg, Germany, 2003; pp. 43–51. [Google Scholar]
- Venkatesh, C.; Deepak, T.; Rajesh, K.; Krishna, K.; Kamath, A. Flatness based TCSC controller for transient stability enhancement of power system. In Proceedings of the 2010 Modern Electric Power Systems, Wroclaw, Poland, 20–22 September 2010; pp. 1–6. [Google Scholar]
- Sun, J.; Zheng, H.; DeMarco, C.L.; Chai, Y. Energy function-based model predictive control with UPFCs for relieving power system dynamic current violation. IEEE Trans. Smart Grid 2016, 7, 2933–2942. [Google Scholar] [CrossRef]
- Gómez, J.S.; Sáez, D.; Simpson-Porco, J.W.; Cárdenas, R. Distributed Predictive Control for Frequency and Voltage Regulation in Microgrids. IEEE Trans. Smart Grid 2019, 11, 1319–1329. [Google Scholar] [CrossRef]
- Ngamroo, I.; Vachirasricirikul, S. Coordinated control of optimized SFCL and SMES for improvement of power system transient stability. IEEE Trans. Appl. 2011, 22, 5600805. [Google Scholar] [CrossRef]
- Fuchs, A.; Imhof, M.; Demiray, T.; Morari, M. Stabilization of large power systems using VSC–HVDC and model predictive control. IEEE Trans. Power Deliv. 2013, 29, 480–488. [Google Scholar] [CrossRef]
- Falahi, M.; Lotfifard, S.; Ehsani, M.; Butler-Purry, K. Dynamic model predictive-based energy management of DG integrated distribution systems. IEEE Trans. Power Deliv. 2013, 28, 2217–2227. [Google Scholar] [CrossRef]
- Short, J.A.; Infield, D.G.; Freris, L.L. Stabilization of grid frequency through dynamic demand control. IEEE Trans. power Syst. 2007, 22, 1284–1293. [Google Scholar] [CrossRef] [Green Version]
- Shi, Q.; Li, F.; Hu, Q.; Wang, Z. Dynamic demand control for system frequency regulation: Concept review, algorithm comparison, and future vision. Electr. Power Syst. Res. 2018, 154, 75–87. [Google Scholar] [CrossRef]
- Zhu, Q.; Jiang, L.; Yao, W.; Zhang, C.-K.; Luo, C. Robust load frequency control with dynamic demand response for deregulated power systems considering communication delays. Electr. Power Compon. Syst. 2017, 45, 75–87. [Google Scholar] [CrossRef] [Green Version]
- Shi, Q.; Li, F.; Liu, G.; Shi, D.; Yi, Z.; Wang, Z. Thermostatic load control for system frequency regulation considering daily demand profile and progressive recovery. IEEE Trans. Smart Grid 2019, 10, 6259–6270. [Google Scholar] [CrossRef]
- Shi, Q.; Cui, H.; Li, F.; Liu, Y.; Ju, W.; Sun, Y. A hybrid dynamic demand control strategy for power system frequency regulation. CSEE J. Power Energy Syst. 2017, 3, 176–185. [Google Scholar] [CrossRef]
- Veronica, A.J.; Kumar, N.S.; Gonzalez-Longatt, F. Design of Load Frequency Control for a Microgrid Using D-partition Method. Int. J. Emerg. Electr. Power Syst. 2020, 21. [Google Scholar] [CrossRef]
- Tchuisseu, E.T.; Gomila, D.; Brunner, D.; Colet, P. Effects of dynamic-demand-control appliances on the power grid frequency. Phys. Rev. E 2017, 96, 022302. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mohsenian-Rad, A.-H.; Wong, V.W.; Jatskevich, J.; Schober, R.; Leon-Garcia, A. Autonomous demand-side management based on game-theoretic energy consumption scheduling for the future smart grid. IEEE Trans. Smart Grid 2010, 1, 320–331. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-Longatt, F. Introduction to Power Systems, Presentation Slide. 2019. [CrossRef]
- Hamon, C.; Perninge, M.; Soder, L. Frequency Control: Operation of Frequency Control Schemes in Power Systems with Large Amounts of Wind Power. Dectoral dissertation, KTH Royal Institute of Technology, Stockholm, Sweden, 2016. [Google Scholar]
- ESO. Grid Code (GC), Ofgem, Editor, nationalgridESO. Available online: https://www.nationalgrideso.com/industry-information/codes/grid-code#:~:text=The%20Grid%20Code%20details%20the,of%20System%20Code%20(CUSC) (accessed on 3 December 2021).
- Group, N.G. The Grid Code Issues 5 Revision 21; National Grid Electricity Transmission: London, UK, 2017. [Google Scholar]
- Luo, X.; Wang, J.; Wojcik, J.D.; Wang, J.; Li, D.; Draganescu, M.; Li, Y.; Miao, S. Review of voltage and frequency grid code specifications for electrical energy storage applications. Energies 2018, 11, 1070. [Google Scholar] [CrossRef] [Green Version]
- Cobben, S.; Gaiddon, B.; Laukamp, H. Impact of Photovoltaic Generation on Power Quality in Urban Areas with High PV Population: Results from Monitoring Campaigns; Tech. Rep.; Intelligent Energy Europe: Brussels, Belgium, 2008; p. 420208. [Google Scholar]
- Hirth, L.; Ziegenhagen, I. Control Power and Variable Renewables: A Glimpse at German Data. 2013. Available online: https://www.feem.it/en/publications/feem-working-papers-note-di-lavoro-series/control-power-and-variable-renewables-a-glimpse-at-german-data/ (accessed on 10 July 2021).
- Regulator, A.E. (Ed.) Electricity Transmission; Australian Government: Canberra, Australia, 2009.
- Operator, A.E.M. Black system south Australia 28 September 2016. Rep. Aust. Energy Mark. Oper. Ltd. 2017. [Google Scholar]
- Warren, M. South Australia’s Blackouts: It’s Not Black or White. Available online: https://www.energycouncil.com.au/analysis/south-australias-blackouts-not-as-simple-as-it-looks/ (accessed on 16 September 2020).
- Christiansen, W.; Johnsen, D.T. Analysis of requirements in selected Grid Codes; Prepared for Orsted-DTU Section of Electric Power Engineering, Technical University of Denmark (DTU): Copenhagen, Denmark, 2006. [Google Scholar]
- Cha, S.-T.; Wu, Q.; Østergaard, J. Frequency Stabilizing Scheme for a Danish Island Grid. In Proceedings of the 3rd IEEE PES Innovative Smart Grid Technologies (ISGT) Europe Conference (IEEE PES ISGT Europe 2012), Berlin, Germany, 14–17 October 2012. [Google Scholar]
- Møller Andersen, F.; Grenaa Jensen, S.; Larsen, H.V.; Meibom, P.; Ravn, H.; Skytte, K.; Togeby, M. Analyses of Demand Response in Denmark; Risoe National Lab.: Roskilde, Denmark, 2006. [Google Scholar]
- DL T 1040–2007 Grid Operation Guidelines; DOC88: Beijing, China, 2007.
- Handbook, U.O. Appendix 1: Load-Frequency-Control and Performance; UCTE: Brussels, Belgium, 2004. [Google Scholar]
- Lazarev, G.; Hrustalyov, V.; Garievskij, M. Non-Baseload Operation in Nuclear Power Plants: Load Following and Frequency Control Modes of Flexible Operation; Nuclear Energy Series; International Atomic Energy Agency: Vienna, Austria, 2018; p. 173. [Google Scholar]
- Pandurangan, V.; Zareipour, H.; Malik, O. Frequency Regulation Services: A Comparative Study of Select North American and European Reserve Markets. In Proceedings of the 2012 North American Power Symposium (NAPS), Champaign, IL, USA, 9–11 September 2012; pp. 1–8. [Google Scholar]
- Gao, D.W.; Muljadi, E.; Tian, T.; Miller, M.; Wang, W. Comparison of Standards and Technical Requirements of Grid-Connected Wind Power Plants in China and the United States; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2016. [Google Scholar]
- 19963-G.T. Technical Rule for Connecting Wind Farm to Power System; State Electricity Regulatory Commission of People’s Republic of China: Beijing, China, 2011.
- Bakshi, A.S.; Croop, D.; Endress, E.; Staschus, K.; Bose, A. Report of Expert Group to Review and Suggest Measures for Bringing Power System Operation Closer to National Reference Frequency; Central Electricity Regulatory Commission: New Delhi, India, 2017.
- Nath, R.; Bakshi, A.S.; Ravinder, S.; Narasimhan, S.R.; Jain, H.; Shrivastava, S.C. Report of the Expert Group: Review of Indian Electricity Grid Code; Community Emergency Response Team: New Delhi, India, 2020.
- Community Emergency Response Team. Grid Security Need for Tightening of Frequency Band & Other Measures; Community Emergency Response Team: New Delhi, India, 2011.
- Committee, E. Report of the Enquiry Committee on Grid Disturbance in Northern Region on 30th July 2012 and in Northern, Eastern & North-Eastern Region on 31st July, 2012; Central Electricity Regulatory Commission: New Delhi, India.
- Undrill, J. Notes of Frequency Control for the Australian Energy Market Operator; Australian Energy Market Commission: Canbera, Australia, 2019.
- Prepared by NERC RS Committee. Balancing and Frequency Control: A Technical Document Prepared by the NERC Resources Subcommittee; NERC Technical Report; NERC RS Committee: Atlanta, GA, USA, 2011. [Google Scholar]
- Weckx, S.; D’hulst, R.; Driesen, J. Primary and Secondary Frequency Support by a Multi-Agent Demand Control System. IEEE Trans. Power Syst. 2014, 30, 1394–1404. [Google Scholar] [CrossRef]
- Oshnoei, A.; Khezri, R.; Muyeen, S.; Blaabjerg, F. On the contribution of wind farms in automatic generation control: Review and new control approach. Appl. Sci. 2018, 8, 1848. [Google Scholar] [CrossRef] [Green Version]
- Tarnowski, G.C. Coordinated Frequency Control of Wind Turbines in Power Systems with High Wind Power Penetration. Ph.D. Thesis, Technical University of Denmark (DTU), Copenhagen, Denmark, 2012. [Google Scholar]
- Perninge, M.; Eriksson, R. Optimal tertiary frequency control in power systems with market-based regulation. IFAC-Pap 2017, 50, 4374–4381. [Google Scholar]
- Force, S.T. Primary Frequency Response Stakeholder Education Part 1 of 2; PJM: Audubon, PA, USA, 2017; Available online: https://www.pjm.com/-/media/committees-groups/task-forces/pfrstf/20170901/20170901-primary-frequency-response-education-part-1-of-2.ashx (accessed on 10 July 2021).
- Power Returns Following Blackouts. BBC News Channel, 28 May 2008.
- Milner, M.; Wearden, G. Q & A: Blackout Britain. The Guardian, 2008. [Google Scholar]
- Venezuela Crisis: Fresh Power Cuts Black Out Caracas. BBC News, 26 March 2019.
- No End in Sight to Venezuela’s Blackout, Experts Warn. The New York Times, 11 March 2019.
- Dayton, R. Maduro’s Revolutionary Guards: The Rise of Paramilitarism in Venezuela. SunSentinel, 2019. [Google Scholar]
- Blackout Traker: United States Annual Report 2018; EATON Powering Business Worldwide: Ohio, OH, USA, 2019.
- Nyberg, M. 2019 Total System Electric Generation; California Energy Commission: Sacramento, CA, USA, 2020.
- Mossburg, C. More than 3 Million California Homes May Lose Power in Record Heat Wave Due to Rolling Blackouts. CNN, USA. 17 August 2020. [Google Scholar]
- Borunda, A. Why Renewables aren’t to Blame for California’s Blackouts. National Geographic, 2020. [Google Scholar]
- Kasler, D.; Heerer, M. California Avoided Rolling Blackouts for Two Decades. What Went Wrong on the Grid? The Sacramento Bee, 2020. [Google Scholar]
- Haes Alhelou, H.; Hamedani-Golshan, M.E.; Njenda, T.C.; Siano, P. A survey on power system blackout and cascading events: Research motivations and challenges. Energies 2019, 12, 682. [Google Scholar] [CrossRef] [Green Version]
- Blackout Tracker: United States Annual Report 2017; EATON Power Business Worldwide: Scottsdale, AZ, USA, 2018.
- Hodge, B.M.S.; Jain, H.; Brancucci, C.; Seo, G.S.; Korpås, M.; Kiviluoma, J.; Holttinen, H.; Smith, J.C.; Orths, A.; Estanqueiro, A. Addressing technical challenges in 100% variable inverter-based renewable energy power systems. Wiley Interdiscip. Rev. Energy Environ. 2020, 9, e376. [Google Scholar] [CrossRef]
- Alani, A.Y.; Osunmakinde, I.O. Short-term multiple forecasting of electric energy loads for sustainable demand planning in smart grids for smart homes. Sustainability 2017, 9, 1972. [Google Scholar] [CrossRef] [Green Version]
- Remon, D.; Cantarellas, A.M.; Mauricio, J.M.; Rodriguez, P. Power system stability analysis under increasing penetration of photovoltaic power plants with synchronous power controllers. IET Renew. Power Gener. 2017, 11, 733–741. [Google Scholar] [CrossRef] [Green Version]
- Peters, D.; Kilper, T.; Calais, M.; Jamal, T.; von Maydell, K. Solar short-term forecasts for predictive control of battery storage capacities in remote PV diesel networks. In Transition Towards 100% Renewable Energy; Springer: Berlin/Heidelberg, Germany, 2018; pp. 325–333. [Google Scholar]
- Xu, Y.; Zhang, R.; Zhao, J.; Dong, Z.Y.; Wang, D.; Yang, H.; Wong, K.P. Assessing short-term voltage stability of electric power systems by a hierarchical intelligent system. IEEE Trans. neural Netw. Learn. Syst. 2015, 27, 1686–1696. [Google Scholar] [CrossRef]
- Wang, J.; Li, P.; Ran, R.; Che, Y.; Zhou, Y. A short-term photovoltaic power prediction model based on the gradient boost decision tree. Appl. Sci. 2018, 8, 689. [Google Scholar] [CrossRef] [Green Version]
- Du, P.; Wang, J.; Yang, W.; Niu, T. A novel hybrid model for short-term wind power forecasting. Appl. Soft Comput. 2019, 80, 93–106. [Google Scholar] [CrossRef]
- Barbounis, T.G.; Theocharis, J.B.; Alexiadis, M.C.; Dokopoulos, P.S. Long-term wind speed and power forecasting using local recurrent neural network models. IEEE Trans. Energy Convers. 2006, 21, 273–284. [Google Scholar] [CrossRef]
- Negnevitsky, M.; Nguyen, D.H.; Piekutowski, M. Risk assessment for power system operation planning with high wind power penetration. IEEE Trans. Power Syst. 2014, 30, 1359–1368. [Google Scholar] [CrossRef]
- Mitra, A.; Chatterjee, D. Active power control of DFIG-based wind farm for improvement of transient stability of power systems. IEEE Trans. Power Syst. 2015, 31, 82–93. [Google Scholar] [CrossRef]
- Tielens, P.; Henneaux, P.; Cole, S. Penetration of renewables and reduction of synchronous inertia in the European power system-Analysis and solutions. ASSET project, DG Energy Unit C.2. European Uunion, 2018.
- Shrestha, A.; Ghimire, B.; Gonzalez-Longatt, F. A Bayesian Model to Forecast the Time Series Kinetic Energy Data for a Power System. Energies 2021, 14, 3299. [Google Scholar] [CrossRef]
- Ulbig, A.; Borsche, T.S.; Andersson, G. Impact of low rotational inertia on power system stability and operation. IFAC Proc. Vol. 2014, 47, 7290–7297. [Google Scholar] [CrossRef] [Green Version]
- Zografos, D. Power System Inertia Estimation and Frequency Response Assessment; KTH Royal Institute of Technology: Stockholm, Sweden, 2019. [Google Scholar]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C. Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-hill: New York, NY, USA, 1994; Volume 7. [Google Scholar]
- Meegahapola, L.; Sguarezi, A.; Bryant, J.S.; Gu, M.; Conde D, E.R.; Cunha, R. Power System Stability with Power-Electronic Converter Interfaced Renewable Power Generation: Present Issues and Future Trends. Energies 2020, 13, 3441. [Google Scholar] [CrossRef]
- Munkhchuluun, E.; Meegahapola, L.; Vahidnia, A. The Large Disturbance Rotor Angle Stability with DFIG Wind Farms. In Proceedings of the 2019 9th International Conference on Power and Energy Systems (ICPES), Perth, Australia, 10–12 December 2019; pp. 1–6. [Google Scholar]
- Mansouri, N.; Lashab, A.; Sera, D.; Guerrero, J.M.; Cherif, A. Large photovoltaic power plants integration: A review of challenges and solutions. Energies 2019, 12, 3798. [Google Scholar] [CrossRef] [Green Version]
- Qdr, Q. Benefits of Demand Response in Electricity Markets and Recommendations for Achieving Them; Tech. Rep; US Dept. Energy: Washington, DC, USA, 2006.
- Albadi, M.H.; El-Saadany, E.F. A summary of demand response in electricity markets. Electr. Power Syst. Res. 2008, 78, 1989–1996. [Google Scholar] [CrossRef]
- Khadka, N.; Bista, A.; Adhikari, B.; Shrestha, A.; Bista, D.; Adhikary, B. Current Practices of Solar Photovoltaic Panel Cleaning System and Future Prospects of Machine Learning Implementation. IEEE Access 2020, 8, 135948–135962. [Google Scholar] [CrossRef]
- Shrestha, A.; Bishwokarma, R.; Chapagain, A.; Banjara, S.; Aryal, S.; Mali, B.; Thapa, R.; Bista, D.; Hayes, B.P.; Papadakis, A. Peer-to-peer energy trading in micro/mini-grids for local energy communities: A review and case study of Nepal. IEEE Access 2019, 7, 131911–131928. [Google Scholar] [CrossRef]
- Shrestha, A.; Kattel, R.; Dachhepatic, M.; Mali, B.; Thapa, R.; Singh, A.; Bista, D.; Adhikary, B.; Papadakis, A.; Maskey, R.K. Comparative study of different approaches for islanding detection of distributed generation systems. Appl. Syst. Innov. 2019, 2, 25. [Google Scholar] [CrossRef] [Green Version]
- Shrestha, P.; Shrestha, A.; Shrestha, N.T.; Papadakis, A.; Maskey, R.K. Assessment on scaling-up of mini-grid initiative: Case study of mini-grid in rural Nepal. Int. J. Precis. Eng. Manuf.-Green Technol. 2021, 8, 217–231. [Google Scholar] [CrossRef]
- Dong, D.; Wen, B.; Boroyevich, D.; Mattavelli, P.; Xue, Y. Analysis of phase-locked loop low-frequency stability in three-phase grid-connected power converters considering impedance interactions. IEEE Trans. Ind. Electron. 2014, 62, 310–321. [Google Scholar] [CrossRef]
- Anani, N.; Al-Kharji AlAli, O.; Al-Qutayri, M.; Al-Araji, S. Synchronization of a renewable energy inverter with the grid. J. Renew. Sustain. Energy 2012, 4, 043103. [Google Scholar] [CrossRef] [Green Version]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Paquette, A.D.; Reno, M.J.; Harley, R.G.; Divan, D.M. Sharing transient loads: Causes of unequal transient load sharing in islanded microgrid operation. IEEE Ind. Appl. Mag. 2013, 20, 23–34. [Google Scholar] [CrossRef]
- Paolone, M.; Gaunt, T.; Guillaud, X.; Liserre, M.; Meliopoulos, S.; Monti, A.; Van Cutsem, T.; Vittal, V.; Vournas, C. Fundamentals of power systems modelling in the presence of converter-interfaced generation. Electr. Power Syst. Res. 2020, 189, 106811. [Google Scholar] [CrossRef]
- Johnson, S.C.; Rhodes, J.D.; Webber, M.E. Understanding the impact of non-synchronous wind and solar generation on grid stability and identifying mitigation pathways. Appl. Energy 2020, 262, 114492. [Google Scholar] [CrossRef]
- De Brabandere, K.; Bolsens, B.; Van den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A voltage and frequency droop control method for parallel inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Qoria, T.; Gruson, F.; Colas, F.; Guillaud, X.; Debry, M.-S.; Prevost, T. Tuning of cascaded controllers for robust grid-forming Voltage Source Converter. In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018; pp. 1–7. [Google Scholar]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. Automatic tuning of cascaded controllers for power converters using eigenvalue parametric sensitivities. IEEE Trans. Ind. Appl. 2014, 51, 1743–1753. [Google Scholar] [CrossRef]
- Johnson, B.B.; Sinha, M.; Ainsworth, N.G.; Dörfler, F.; Dhople, S.V. Synthesizing virtual oscillators to control islanded inverters. IEEE Trans. Power Electron. 2015, 31, 6002–6015. [Google Scholar] [CrossRef]
- Seo, G.-S.; Colombino, M.; Subotic, I.; Johnson, B.; Groß, D.; Dörfler, F. Dispatchable virtual oscillator control for decentralized inverter-dominated power systems: Analysis and experiments. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 561–566. [Google Scholar]
- Li, Z.; Zang, C.; Zeng, P.; Yu, H.; Li, S.; Bian, J. Control of a Grid-Forming Inverter Based on Sliding-Mode and Mixed H2/H∞ Control. IEEE Trans. Ind. Electron. 2016, 64, 3862–3872. [Google Scholar] [CrossRef]
- Qoria, T.; Li, C.; Oue, K.; Gruson, F.; Colas, F.; Guillaud, X. Direct AC voltage control for grid-forming inverters. J. Power Electron. 2020, 20, 198–211. [Google Scholar] [CrossRef]
- Dörfler, F. Control of Power Converters in Low-Inertia Power Systems. In KTH Workshop: Emerging Topics in Control of Power Systems; KTH Campus: Södertälje, Sweden; Available online: https://sites.google.com/view/kth-topics-power-system/home (accessed on 12 December 2020).
- Liang, X.; Karim, C.A.B. Virtual synchronous machine method in renewable energy integration. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 364–368. [Google Scholar]
- Yap, K.Y.; Sarimuthu, C.R.; Lim, J.M.-Y. Virtual Inertia-Based Inverters for Mitigating Frequency Instability in Grid-Connected Renewable Energy System: A Review. Appl. Sci. 2019, 9, 5300. [Google Scholar] [CrossRef] [Green Version]
- Mosca, C.; Arrigo, F.; Mazza, A.; Bompard, E.; Carpaneto, E.; Chicco, G.; Cuccia, P. Mitigation of frequency stability issues in low inertia power systems using synchronous compensators and battery energy storage systems. IET Gener. Transm. Distrib. 2019, 13, 3951–3959. [Google Scholar] [CrossRef]
- Liu, J.; Hossain, M.; Lu, J.; Rafi, F.; Li, H. A hybrid AC/DC microgrid control system based on a virtual synchronous generator for smooth transient performances. Electr. Power Syst. Res. 2018, 162, 169–182. [Google Scholar] [CrossRef]
- Bevrani, H.; Ise, T.; Miura, Y. Virtual synchronous generators: A survey and new perspectives. Int. J. Electr. Power Energy Syst. 2014, 54, 244–254. [Google Scholar] [CrossRef]
- Shintai, T.; Miura, Y.; Ise, T. Oscillation damping of a distributed generator using a virtual synchronous generator. IEEE Trans. Power Deliv. 2014, 29, 668–676. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Power quality improvement of microgrids by virtual synchronous generator control. In Proceedings of the 2016 Electric Power Quality and Supply Reliability (PQ), Tallinn, Estonia, 29–31 August 2016; pp. 119–124. [Google Scholar]
- D’Arco, S.; Suul, J.A. A synchronization controller for grid reconnection of islanded virtual synchronous machines. In Proceedings of the 2015 IEEE 6th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aachen, Germany, 22–25 June 2015; pp. 1–8. [Google Scholar]
- Poolla, B.K.; Bolognani, S.; Dörfler, F. Optimal placement of virtual inertia in power grids. IEEE Trans. Autom. Control. 2017, 62, 6209–6220. [Google Scholar] [CrossRef] [Green Version]
- Peña Asensio, A.; Gonzalez-Longatt, F.; Arnaltes, S.; Rodríguez-Amenedo, J.L. Analysis of the Converter Synchronizing Method for the Contribution of Battery Energy Storage Systems to Inertia Emulation. Energies 2020, 13, 1478. [Google Scholar] [CrossRef] [Green Version]
- Marrazi, E.; Yang, G.; Weinreich-Jensen, P. Allocation of synchronous condensers for restoration of system short-circuit power. J. Mod. Power Syst. Clean Energy 2018, 6, 17–26. [Google Scholar] [CrossRef] [Green Version]
- ElectraNet. Economic Life for ElectraNEt Synchronous Condensers; GHD Advisory: Canbera, Australia, 2019. [Google Scholar]
- Energy Sector Management Assistance Program. Grid Integration Requirements for Variable Renewable Energy; World Bank eLibrary: Washington, DC, USA, 2019. [Google Scholar]


| Country | Nominal Frequency (Hz) | Critical Frequency (Hz) | References |
|---|---|---|---|
| Great Britain | 49.5–50.5 | 47–52 | [67,68,69] |
| Germany | 49.5–50.5 | 47–52 | [69,70,71] |
| France | 49.5–50.5 | 47–52 | [69,70] |
| Belgium | 49.5–50.5 | 47–52 | [69] |
| Austria | 49.5–50.5 | 47.5–51.5 | [69] |
| Australia | 49.75–50.25 | 47–52 | [72,73,74] |
| Ireland | 49.8–50.2 | 47–52 | [69] |
| Italy | 49.1–50.1 | 47.5–51.5 | [69] |
| Poland | 49.5–50.5 | 47–52 | [69] |
| Denmark | 49.9–50.1 | 47.5–51 | [75,76,77] |
| China | 49.8–50.2 | 48–51 | [78] |
| Concept | Features | References |
|---|---|---|
| Inertia emulation via electronic components and BESSs | This concept introduces electronic devices such as supercapacitors or BESSs to provide the inertial response to the power system during a fault or unstable situation (i.e., the condition of frequency deviation). The reduced power during power system unbalance or fault can be compensated for by the introduced components to support the frequency response, similarly to conventional synchronous generators. Additionally, this concept helps in system synchronization by providing virtual control methods. | [155] |
| Incentivizing synchronous condensers or high-inertia generators | Synchronous condensers can be introduced to provide the inertia and short-circuit power in low-inertia grid systems via voltage recovery concepts during system instability. Generally, this technique considers the emulated generators as conventional generators, which can provide the required inertia and the active and reactive powers. One of the complexities of this technique is the requirement of an optimized technique for the selection of appropriate capacities and the locations of emulated generators. | [156,157] |
| Curtailment methods and grid code modification | Power production limits, instantaneous combined cycle generation limits, or price signals can be used to increase the inertia contribution. This approach is mostly based on the planning and operation of the existing power system, rather than adopting new technologies. Furthermore, the existing grid code can be changed to maintain the system during acceptable system instability. For example, the operational settings of the existing control equipment can be revised so as to increase the acceptable limit, whereby no automatic shutdown would take place during small levels of deviation. | [137,158] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shrestha, A.; Gonzalez-Longatt, F. Frequency Stability Issues and Research Opportunities in Converter Dominated Power System. Energies 2021, 14, 4184. https://doi.org/10.3390/en14144184
Shrestha A, Gonzalez-Longatt F. Frequency Stability Issues and Research Opportunities in Converter Dominated Power System. Energies. 2021; 14(14):4184. https://doi.org/10.3390/en14144184
Chicago/Turabian StyleShrestha, Ashish, and Francisco Gonzalez-Longatt. 2021. "Frequency Stability Issues and Research Opportunities in Converter Dominated Power System" Energies 14, no. 14: 4184. https://doi.org/10.3390/en14144184
APA StyleShrestha, A., & Gonzalez-Longatt, F. (2021). Frequency Stability Issues and Research Opportunities in Converter Dominated Power System. Energies, 14(14), 4184. https://doi.org/10.3390/en14144184