1. Introduction
The travel behavior of people is affected by the improvement of transportation technology, especially car manufacturing, which aims at improving the quality of travelers’ life. During the past years, vehicles have been developed with automation levels introduced (Levels 0 to 5). At present, the main challenge is to have full driving automation (i.e., Level 5) [
1]. A full driving automation vehicle is considered as an innovation that brings positive impacts on the environment, economics, safety, traffic, and travelers’ mobility [
2,
3]. An autonomous vehicle (AV) is a fully automated, self-driving vehicle that gives individuals the opportunity to use a car without restrictions, eliminates the spent time in parking, releases the stress of driving, and makes driving without a driving license possible [
2,
4,
5]. The traditional mobility patterns of travelers are likely to change once AVs arrive on the market [
6]. The reduction in the number of parking spaces, travel time, and car ownership is envisaged advantages of AVs [
7]. The role of people in AV driving is likely to change as well because AVs would have full control of driving, thus converting drivers to passengers. The experience of traveling in AVs might be more pleasant than traveling in cars [
8]. It is worth mentioning that traveling in AVs can be considered as a door-to-door service [
9].
The advantages of AVs are definitely present for people. Travelers are generally interested in decreasing the travel time by choosing a suitable transport mode that makes them satisfied. For example, the more comfortable transport modes enable travelers to conduct multitasking onboard, which in turn might change the negative view of travel time (i.e., better perceived travel time) [
10,
11]. The selection of transport mode is changed with the presence of AVs since AVs provide extra benefits compared to cars [
12,
13]. The preferences of people regarding for example trip purpose, travel time, travel cost, weather, sociodemographic variables, and the multitasking availability onboard affect the selection of transport mode [
14,
15,
16]. In theory, people evaluate their travel time variously based on their preferences connected to their own characteristics and journey properties, as stated by the economic theory [
17]. Transport choice models are used for understanding the travel behavior of people and for estimating the value of travel time (VOT) in certain transport modes [
18]. Transport modes are built based on the journey properties and travelers characteristics [
19]. VOT is used for estimating the willingness of travelers to pay to either save time or to switch to other transport modes (generally, the least VOT is preferable) [
20,
21]. The impact of transport modes on the VOT of travelers was demonstrated in several papers, where people evaluated the travel time differently based on several factors, such as the trip purpose, the traffic condition, the length of the journey, and the sociodemographic variables, such as income [
22,
23,
24]. Based on several studies conducted worldwide on AVs, the VOT of AVs has been evaluated less than that of conventional cars, given that when AVs are used, a traveler can perform multitasking during traveling and convert part of the travel time to productive time [
16,
25]. One of the properties of using AVs is that travelers are exposed to a specific waiting time, which is similar to the waiting time at a bus stop [
26]. Practically, the tradeoff between the travel time in AV (including waiting for an AV at the activity location) and the travel time in a bus (including access, egress, and waiting time at stops) has to be considered, and the highest utility for travelers is then selected.
AVs are likely to affect the behavior of travelers once they appear on the market. The future demand for AVs and the foreseen travel behavior changes need continuous research due to the lack of empirical experience on using AVs. The acceptability of people towards AVs and the impacts of this technology on the mobility of travelers call for examination. Several researchers have studied AVs theoretically from various aspects, such as social benefits, economic benefits, or environmental benefits [
3,
23,
24]. To address the absence of empirical studies on the impact of AV on travel behavior, agent-based models were applied by simulating the features of the transportation system [
27]. Previous studies show the impact of AVs on the travelers’ mobility concerning certain case studies, such as Berlin, Paris, and Delft [
26,
28,
29]; still, none of them studied the willingness of people to change to AVs in Hungary. Moreover, some studies, such as [
30], focused on the aspects that make travelers change to AVs, such as acceptability, willingness to pay, and group differences, by considering the usage of AVs. This present study uses these aspects in simulations, such as the decrease in VOT, and the specific users of transport modes, as addressed in the literature review. Several other studies simulated the travel demand with AVs without considering the groups of users, while a few studies assumed a certain value of VOT to simulate the AVs with other transport modes.
In this research, the main contribution is the estimation of the effects of introducing AVs on the existing transport modal share in Budapest, where the VOT of AVs has been less evaluated than that of conventional cars, and the development of an agent-based model. In addition, this paper presents some results regarding the variations on the modal shares based on certain changes in the cost of time spent in AVs. Furthermore, the integrations of AVs into the daily activity chain plans are introduced, including the existing situation. In this regard, the hypotheses of this research are set, namely that (1) AVs can decrease the number of conventional transport modes on the road network, (2) AV will affect the existing model share to some extent where people continue using conventional modes in the AV era, and (3) AVs reduce the travel time and increase the VMT. The level of impact can be measured based on to what extent AVs decreases the VOT of travelers and the size of the AV fleet on the market (i.e., penetration). Testing the hypotheses is conducted using Multi-Agent Transport Simulation (MATSim), which was used by several researchers in simulating the travelers using their daily activity plans (i.e., disaggregate level). MATSim applies a co-evolutionary algorithm and has the ability to simulate large projects in competitive run time.
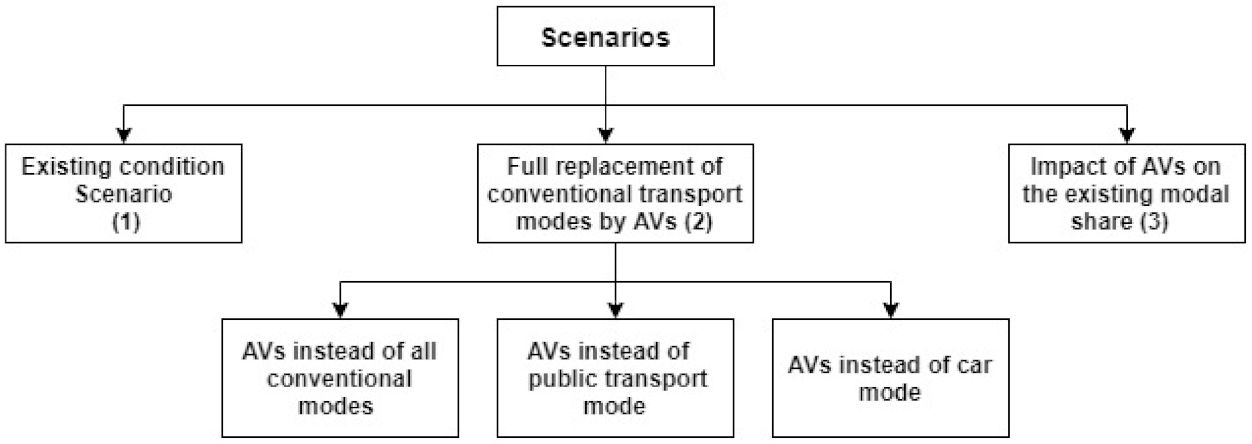
The impact of AVs on different transport user groups is examined as well as the modal share through three scenarios: (1) a simulation and optimization of the existing condition through a representative household sample size; (2) a simulation of the daily activity plans when all conventional transport modes, car users, and public transport riders are replaced by AVs; and (3) a simulation of daily activity plans when AVs are integrated into the daily activity plans concerning different VOTs of AVs (based on the VOT of conventional cars). The first scenario is studied to understand the existing behavior of travelers in which travelers are simulated and optimized based on their travel characteristics mentioned in the recorded daily activity plans (e.g., departure time, arrival time, transport mode, and activity location). The second scenario is conducted to estimate the impact of replacing specific groups of transport modes users by AVs, and finding the number of a replaced conventional cars by one AV; this scenario also represents simulating AVs with different travel demands. Finally, the third scenario is used for finding the impact of AVs on the existing conventional modal share based on different VOT assumptions to predict the future demand on each transport mode, where the assumptions are used for the absence of empirical results. The output of this study might be beneficial to policymakers in developing new strategies for new mobility services in urban areas.
The work is presented in the following way: After the introduction,
Section 2 provides a literature review, and
Section 3 explains the methodology. The results are presented in
Section 4, and
Section 5 includes the discussion of the results. Finally, a conclusion is drawn in
Section 6.
2. Literature Review
AV as a mobility innovation provides a demanding research area, where travel time, travel cost, waiting time, safety, and ridesharing are the main determinants of using AVs [
31,
32]. AVs are expected to make an impact on the travel behavior of travelers, and this impact is considered a variable based on the preferences of people [
23]. People usually try to minimize their travel time and increase their productive time (activity time) to maximize their benefit (utility) [
33]. Several studies demonstrated that AVs could reduce the negative utility of travel time by enabling people to conduct more activities onboard compared to conventional transport modes, thus affecting the feeling and satisfaction of travelers positively [
10,
14,
16]. For example, the trip length is evaluated less negatively when the trip is conducted by AVs instead of conventional cars, with consideration to the travelers’ preferences and their schedules [
34,
35]. Moreover, it is important to determine the target group of users, for example, whether AVs are suitable for elderly people or not [
36]. AV users might face problems regarding their desired departure times, meaning that modifications may need to be made to the departure schedule for many commuters, which enables policymakers to develop a pricing scheme to control the use of AVs [
37]. It is worth mentioning that the usage of AVs is affected by social factors, technology, and safety [
38].
The implications of the availability of AVs on the demand of other modes are noted in several previously published studies. In the study of Berlin by Bischoff et al. [
26], the authors examined the replacement of conventional taxis by autonomous taxis; they showed that 1 autonomous vehicle might replace 10 conventional taxis if the rides are shared, and 6 if the rides are not shared. Furthermore, the study presented an increase in the travel time by 17% when a conventional car was replaced by an autonomous taxi, but this time was assumed to be compensated by the zero parking time of an autonomous taxi. The replacement of conventional cars in Berlin might be achieved by 100,000 autonomous taxis, which allows travelers to switch to AVs to avoid the walking distance and the waiting time of public transport [
26]. Bischoff et al. [
26] assumed that travelers might stay at home waiting for the AVs rather than waiting at the stop station, but of course, other factors also have to be considered (weather, cost, etc.). A study in Zurich by Boesch et al. [
39] showed that travelers are willing to wait for AVs for around 10 or 15 min at peak hours, while in other periods for nearly 5 min, which is very close to the average value in the case of public transport. The study also demonstrated that when the fleet of AVs contained 1000 vehicles, the average waiting times are 7 min and 5 min for peak and off-peak hours, respectively. Boesch et al. [
39] of the study explained that waiting time in case of AVs might be higher than for public transport because AVs might drive straight to travelers based on travelers’ calls, but in case of public transport, travelers need to wait at public transport stops for a certain time, which might be less than the waiting time for AVs. The researchers of this analysis concluded that the acceptable waiting time of 10 min minimized the required fleet size of AVs by 90% even without active fleet management [
39]. Thus, the acceptable waiting time has a great effect on the fleet size of AVs and the efficiency of the AVs fleet to fulfill the demand. Bischoff et al. [
40] used 10 min of waiting time in the simulation of AVs to make a comparison to public transport and to study the impact of autonomous demand responsive transport (DRT) systems on the travel behavior of people in Cottbus, Germany. The researchers of this study used 60 s as the stop time for public transport and inserted a limited number of AVs with a fixed capacity of eight passengers. The time spent to collect travelers along the assigned path from origin to destination meant that the first rider would need to wait longer than others; this consideration is reflected in travel time calculations to avoid having travelers wait longer than an acceptable time, as demonstrated in a study of replacing a bus line with a fixed schedule by shared autonomous taxi in Berlin [
41]. Leich et al. [
41] assumed that the pooled AV mileage price per individual in Berlin is equal to 0.56 USD. This is demonstrated on a cost-based analysis, where the estimated cost of using AVs is 0.64 USD per kilometer and 0.34 USD per kilometer for taxi AVs, with four-seat capacity cars used for calculations [
42]. Moreover, a study prepared by Fagnant et al. [
28] concluded that AVs are expected to replace 9.3 conventional vehicles, supposing that no other modes are available in a pre-defined urban area of Austin city. The researchers of this study divided the city into blocks, where each block was assigned a certain fleet size of AVs to transport the travelers on that block, to minimize the waiting time and the vehicle miles traveled (VMT). The priority of the assigned fleet size of AVs for a block is the travelers in that block [
28]. In case the demand is fulfilled, the idle AVs are used to solve the supply shortage of the neighboring block, if any. The authors of the analysis assigned AVs to travelers within 5–10 minutes, which represents the acceptable waiting time of a traveler [
28]. The produced reduction in waiting time is 82% because of the applied method in distributing the AVs (blocks) [
28]. Vosooghi et al. [
43] studied the performance of shared autonomous vehicles (SAVs) and found that the performance is strongly affected by the size of the fleet, and that the impact of SAVs of more than four seats is limited. The impact of user preferences on SAVs was assessed in Paris city in [
44]; the findings show that neglecting the preferences of travelers in the simulation impacts the use of SAV and consequentially influences future scenarios, as demonstrated by Kamel et al. [
44]. As a continuity of the study of Kamel et al. [
44], preference variations were also studied and integrated into the developed mode in [
45], in order to find the variations on the outputs based on the classical simulation. A study conducted in Budapest, Hungary, showed that one AV can replace eight conventional vehicles, where travelers were exposed to 7–10 min waiting time [
46]. Ortega et al. [
47] showed that one AV can replace 2.4 conventional vehicles and minimize the travel time of workers and shoppers who use park-and-ride facilities in Budapest. Additionally, the demand for AVs is more likely to increase because other non-motorized users are potential users of AVs, based on a study conducted in the United States by Harper et al. [
48]. The penetration of the AVs and the modeling of a transport system that considers AVs in the transport mode choice step were discussed by Török et al. [
49], who addressed the impact on the route and the capacity of roads. Zambrano-Martinez et al. [
50] presented a routing server to collect traffic data for an AV era that was applied in Valencia, Spain, and the results revealed improvements in the speed and the traffic congestion. Alonso-Mora et al. [
51] developed a method to improve the routing of SAVs based on historical data collected by SAVs; a probability distribution was developed based on the collected data to predict the future demand in New York city, and the results showed a reduction in travel time and waiting time.
It was found in several studies that the AVs are expected to increase the VMT and in turn make an impact on the modal share by attracting travelers from other transport modes, such as a car, public transport, and non-motorized modes [
52]. Milakis et al. [
8] showed that AVs are expected to induce additional demand to the road network because of the longer trips. The replacement of all motorized trips by SAVs in Lisbon was studied by Martinez et al. [
53]. The results of their study showed an increase in the VMT from 44% to 89% and a sharp reduction in parking spaces [
53]. Two studies were conducted to evaluate the impact of AVs on the travel behavior of travelers by Auld et al. [
54,
55], who showed an increase in the VMT in Chicago metropolitan region when AVs appear on the market; their study examined the different levels of road capacity, varied fleet penetration of AVs, and different levels of VOT. Another study on travel behavior was conducted by de Almeida Correia et al. [
56] in Delft, Netherlands, where private AVs were used instead of private cars; the results showed an increase in VMT and more utilization for the AV by the household members. Kröger et al. [
57] studied the impact of AVs on the travel behavior in the United States and Germany by applying the spatial travel demand model, where different levels of fleet sizes and VOT were used. The results showed an increase in VMT and a shift from conventional transport modes to the AVs. Other scholars used agent-based modeling to simulate and study the impact of AVs on travel behavior, and they demonstrated that AVs are likely to increase the VMT [
58,
59,
60]. These researchers showed that one AV can replace more than one conventional car, and they concluded that the AVs are expected to have a crucial impact on the modal share. Moreover, it was shown in the study of Cyganski et al. [
61] in the city of Brunswick, Germany that introducing an AV fleet in the transportation system changes the modal share slightly.
One of the tools that are used in studying the behavior of traveler behavior is the MATSim tool [
62]. MATSim is an open-source, activity-based microsimulation software; it is used to model the daily behavior of travelers (i.e., demand) and has the power to simulate large-scale projects (i.e., country) in a competitive time [
63]. The optimization and simulation of daily activity plans are carried out by using MATSim, which applies the concept of a co-evolutionary algorithm based on flexible functions. The MATSim process loop includes the following five steps: initial demand, mobility simulation, scoring, re-planning, and analysis. MATSim uses the Charypar–Nagel utility function as a base for scoring plans. This function combines activity and travel utility, and this utility function is used for the scoring step regarding travelers’ plans, which is followed by a logit selection probability for the re-planning step [
62]. Indeed, re-planning in the MATSim loop is conducted based on the genetic algorithm (GA) to generate alternatives (plans) and to be scored in the utility function (fitness function) [
64]. GA does not generate the optimum solution; instead, it generates a plausible solution, which saves time for discovering possible alternatives [
62]. Simulation of the activity chain requires scoring parameters that are obtained from the Vickrey bottleneck model (marginal utility of traveling, arrival late and early) [
65]. These parameters assign penalties for an activity plan based on the Vickrey penalties’ pattern of departure time model per unit hour (h) (i.e., −6/h, −12/h, and −18/h for β
wait, β
trav, and β
late.ar, respectively) [
65]. Based on the analysis of the opportunities and the recommendations about the impacts of AVs on travelers, different tools can be applied. The most dominant tool is MATSim, which is used in this research. The analysis aims at presenting the changes in travelers’ mobility parameters once AV is introduced as a new mode of transport.
Table 1 presents the summary of the relevant studies, where the description, case study location, and the used methods are presented per study. It is worth mentioning that a discussion of the content of the table was presented earlier in this section. The first two studies focus on the acceptance of AVs and SAVs. It is also noted that different studies focus on the impact of AVs on the travel time and the VMT, and the determination of fleet size based on different travel demands. The previous studies show different outputs with similar trends (i.e., increased VMT, replacing more than one regular car by one AV, and decreased travel time), while few studies focused on the impact of AVs on the modal share by taking into consideration the different values of the VOT. In this study, we provide more detail about the mobility parameters generated from the simulation, such as utilization, drop off time, pick up time, and so on. This study forms one of the first studies that assesses the impact of AVs on the mobility of different groups of people (car users, and public transport users) and on the modal share by considering specific penetration levels of AVs and different VOTs for the travelers. It is noted that MATSim is a common tool used for implementing studies with different purposes due to its flexibility, and it provides an open development platform as an open-source software.
5. Discussion
The transport demand is defined as a derived demand, where people use transport modes to access activities rather than obtaining direct benefits from traveling. The travel time cannot be eliminated, but it can be minimized or converted to productive time by conducting onboard activities and using the faster and more comfortable transport mode. The travel time minimization is reflected in the willingness of people to pay for a travel reduction, which is based on the VOT. The VOT is not equal for all transport modes, and it is different for one person or another. People give value to their travels according to different factors, for example, the willingness of high-income people to pay money to reduce the travel time is higher than that of low-income people. The recent advancement of AVs, which have different characteristics from conventional transport modes, has an impact on the VOT of people. The switch to AVs may decrease the VOT and potentially the negative impacts of travel time. Thus, this paper examines the impact of variations of VOT on the usage of AVs and the consequences on the modal share, as well as the travel behavior of people.
The three scenarios depict the existing condition and evaluate the impacts of AVs on travel behavior, such as the changes in the modal share and VMT. In Scenario 1, the travel behavior of the existing condition of the travelers is estimated, such as the travel distance and the travel time. In Scenario 2, the full replacement of conventional transport modes by AVs is studied, where the average travel time is reduced. The car travelers’ group is replaced by AVs, and the simulation demonstrates that one AV can replace 7.85 conventional cars with an acceptable waiting time. The public transport mode is replaced by AVs, and it results in less travel time and more VMT.
Scenario 2 demonstrates that the travel time can be minimized based on the AVs fleet size, the utility of traveling in AVs, and the characteristics of the travel, such as the departure and arrival times. It is worth mentioning that the road capacity factors, fleet size, speed, acceptable waiting time, travel distance, distribution of AVs on the network, and the capacity of vehicles are the main features that are involved in evaluating the impacts of AVs on the traveler’s mobility. To be precise, the acceptable waiting time corresponds to the waiting time of the travelers at public transport stop/station, and the walking distance corresponds to the nearest stop/station since AVs provide a door-to-door service. However, in case of the car, it corresponds to the parking time. Thus, the actual time saved in Scenario 2 is more than the difference between the travel time by AVs and the travel time in the case of conventional transport modes. For example, 6.8 min should be added to the average trip time in conventional modes of Simulation 2, and 9 min in Simulation 1 (see
Table 8). As a result, the applied AVs can transport travelers with acceptable waiting times and competitive travel times without additional demand for the network. Although this is out of the scope of this paper, based on the literature, it has to be mentioned that AVs can generate extra demand, such as demand from young people who do not have a driving license and may take more trips because of the ease of traveling [
48].
Table 8 presents a summary of the obtained results from the MATSim simulations; it shows a comparison between conventional transport modes and AVs in Scenarios 1 and 2. About 95% of the travelers experience a maximum waiting time of around 10 min, as mentioned in the last column. This column summarizes the differences among the conventional transport modes and AVs in Scenarios 1 and 2. The time savings in Simulations 1, 2, and 3 are 10.25, 21.89, and 34.46 min, respectively, considering the added parking time to Simulations 1 and 2.
The purpose of Scenario 2 is to examine the power of AV technology on travel behavior. Practically speaking, the applicability of Scenario 2 may be seen as unrealistic or far from achievability, but it measures the potential decrease of the travel time and travel distance, and it simulates a fully automated environment.
Scenario 3 tests the impact of AVs on the existing modal share. The result of this scenario demonstrates that the cost of the time spent in AVs determines the usage of AVs. This scenario contains five simulations that are studied using a fixed fleet size of AVs. The results demonstrate that the usage of AVs depends on the cost of time spent traveling. As the cost of time spent in a transport mode decreases, the usage increases. The result shows that the AVs influence the use of cars and public transport. The car seems to be the most affected transport mode. Walking and biking, which are the two non-motorized modes, are affected slightly. For example, the biking modal share is not affected to a great extent because the cost of time spent in travel by using a bike is significantly less than that with AVs. Thus, shifting from bike mode to others is not substantial. The walking mode is exposed to larger usage in the simulation of 90% of the VOT, as the daily activity plans consist of travelers who use motorized modes to travel to their destinations in case the distance is less than or equal to 1000 m (i.e., walkable distance). It is worth mentioning that for other simulations (2, 3, 4, and 5), the walking modal share is almost constant, which comes up to the expectations. The maximum acceptable walkable distance, the travelers’ preferences, and the trip characteristics determine the shift to the walking mode. The results of the five simulations show an additional, accompanied VMT with the use of AVs, which is generated from the empty driven time. Moreover, the results show different fleet utilizations of the 1700 AVs that can be involved in determining the parking spaces for the idle AVs and also in defining the profits generated from the fleet of AVs. More usage of AVs and more intensity of the demand show a larger fleet utilization and less additional VMT.
The results demonstrate that the AVs might decrease the travel time and increase the VMT. The acceptability of people to AVs is likely to determine their usage. Practically speaking, some people might have technophobia, which means that accepting AVs as a transport mode for those people is not an easy task. The acceptability of people (not including those who have technophobia) to the AVs is determined based on several factors connected to the characteristics of AV and the preferences of travelers, such as shared or unshared riding and trip purpose. The level of the impact of AV on the existing modal share is affected by the VOT of people, which is not the same for all, and it is connected to different factors, such as income class, trip purpose, and other factors. The usage of AVs is affected by a change in the VOT, which represents the marginal utility of time over the marginal utility of cost of a particular transport mode and a specific trip. Moreover, the fleet size of AVs influences the usage of AVs as it becomes larger once the usage is higher.
The result of Scenario 2 affects policymakers as demonstrated in the impact of a full replacement of conventional transport modes by AVs. It was shown that a smaller number of vehicles can cause the network to be loaded, while on the other hand, more VMT might be generated. This has an impact on the infrastructure of the depreciation of AVs because the fleet of vehicles drives more than required (empty driven). The empty driven time and additional VMT increase the cost of operation and consequentially decrease the profits due to the cost of maintenance and fuel (in the case of internal combustion engines). Using electric vehicles can reduce the cost of fuel and solve the problem of extra cost accompanied by empty driven vehicles. This requires infrastructure that fulfills the needs of these electric vehicles; an example of such requirements is charging stations.
On the other hand, Scenario 3 is considered more practical because it simulates all transport modes and studies the changes in the modal share with the presence of AVs. It provides valuable information to the policymakers regarding the usage of AVs concerning the VOT, which is affected by the sociodemographic of travelers and their preferences [
8]. The predicted usage of AVs is determined when the VOT of travelers in AVs is known. City planners can obtain input data to their transport models when considering the reduction of cars, which affects the parking spaces and changes the land use. For instance, the high accessibility of AVs determines the residential location of people, and fewer parking spaces affect the prices of real estate.
The findings of this study are consistent with the previous studies, for example, the AVs increases the VMT and decreases the trip time. The magnitudes of VMT and the reduction in trip time are different than previous studies due to different physical factors, such as the locations of activities, road network, and public transport network. The findings of this study reveal new results compared to previous studies, such as the change in modal share, when VOT changes less than 50% of the VOT of a conventional car. The study finds negligible changes in the modal share when VOT is less than 50% of the VOT of conventional cars since the main modal share is AV in the motorized modes. Moreover, the used fleet size of AVs is 20% of the population, which does not simulate the initial stage of acceptability of AVs.
This study did not assess some factors that may also modify the usage of AVs and the impact of AVs on other transport components, in detail. For example, road network capacity, safety, and parking were not examined thoroughly in this research. Thus, these factors are recommended to be studied in further works. A wider sample may include different types of users, such as shoppers, workers, high-income people, or business trip cases. Additionally, different fleet sizes of AVs should be analyzed concerning various seats, and the possibility to share the ride is recommended to be studied.
One of the limitations of this study is that it did not focus on the impact of the AVs on the traffic conditions, and it concerned only travel time. Moreover, the impact of the full automation technology on the capacity of roads, and the interaction with the surrounding environments were out of the scope of this study. Furthermore, the parameters for the utility of travelers were defined by using the literature. The increase in the demand for using AVs from specific user groups was not considered, such as individuals with disabilities, who conduct only some activities due to their limited ability to move around on their own. Finally, the simulations in this study contained the sample size that includes representative households in Budapest city rather a generated synthesis population, which is recommended to be studied in the future and to be compared with the result of this study.
6. Conclusions
In this paper, daily activity plans were simulated and optimized through scenarios by using MATSim software. The simulations included the analysis of the existing condition through a representative household sample size by simulating the daily activity plans when all conventional transport modes, car users, and public transport riders are replaced by AVs, and simulating the daily activity plans of households when AVs are integrated into the daily activity plans using different VOTs of AVs.
Using the scenarios, we studied the current mobility of travelers and the impact of AVs on travelers’ mobility and the conventional modes. With MATSim, we used a genetic algorithm to optimize the daily activity plans based on the Charypar–Nagel utility function and Vickrey’s bottleneck model. Budapest was taken as a case study, and the result of the simulation of the base scenario is that the average traveled distance by a person per day per leg is 3.87 km and the average travel time is 33.4 min. In Scenario 2, the fleet size of AVs serving different demands was determined, which demonstrated that one AV replaces more than one car; the acceptable waiting time determined the required fleet size to serve a demand, and a reduction in travel time was obtained when AV is used as a replacement mode. In Scenario 3, the impact of AVs on the modal share is high, as the marginal utility of traveling in AVs becomes significantly lower than that in conventional cars. However, the impact is small on the non-motorized transport modes. The size of the population determines the number of cars that might be replaced by one AV because the occupancy of AV is affected by the geographical distribution and the intensity of the demand. As a result, 1 AV can replace 7.85 conventional cars with acceptable waiting time. It was demonstrated that the availability of AVs is expected to decrease the number of conventional cars on the market. Thus, the hypotheses were verified, namely that (1) the introduction of AVs on the market is expected to change the modal share of existing transport modes, (2) AVs can replace more than one conventional car, (3) using AVs decreases the travel time, and (4) using AVs produces additional VMT.
This study covered the impact of AVs on modal share, VMT, and travel time, where the perception of people and their VOT onboard of an AV were studied. The results of this research can be used as a reference for policymakers as well as future operators of AVs.
It is recommended that the result of this study be updated using daily activity plans of more recent years, and that the impact of COVID-19 on the mobility of people be considered. In addition, using different penetration levels of AVs on the market would be an interesting idea for a future study. Moreover, it is recommended that empirical results be used for making a comparison with this study to consider, for example, the actual VOT of travelers when they use AV. Additionally, it would be worth investigating the inclusion of novel transport modes that are becoming available on the market, such as e-mobility modes (electric cars, e-scooters), bike sharing, and car sharing. Finally, the economic impact of implementing each scenario is a good topic to be studied in the future.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}