
Arc Fault Detection Algorithm Based on Variational Mode Decomposition and Improved Multi-Scale Fuzzy Entropy



Abstract
:
1. Introduction
- VMD avoids mode mixing, which makes sure that decomposition is meaningful;
- IMFE is stable and can be used to describe signals from the multi-scale;
- SVM has great classification effects on nonlinear problems.
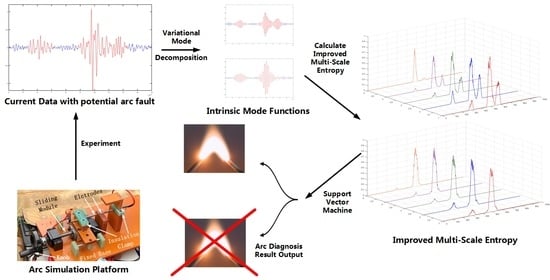
2. Arc Fault Diagnosis Algorithm
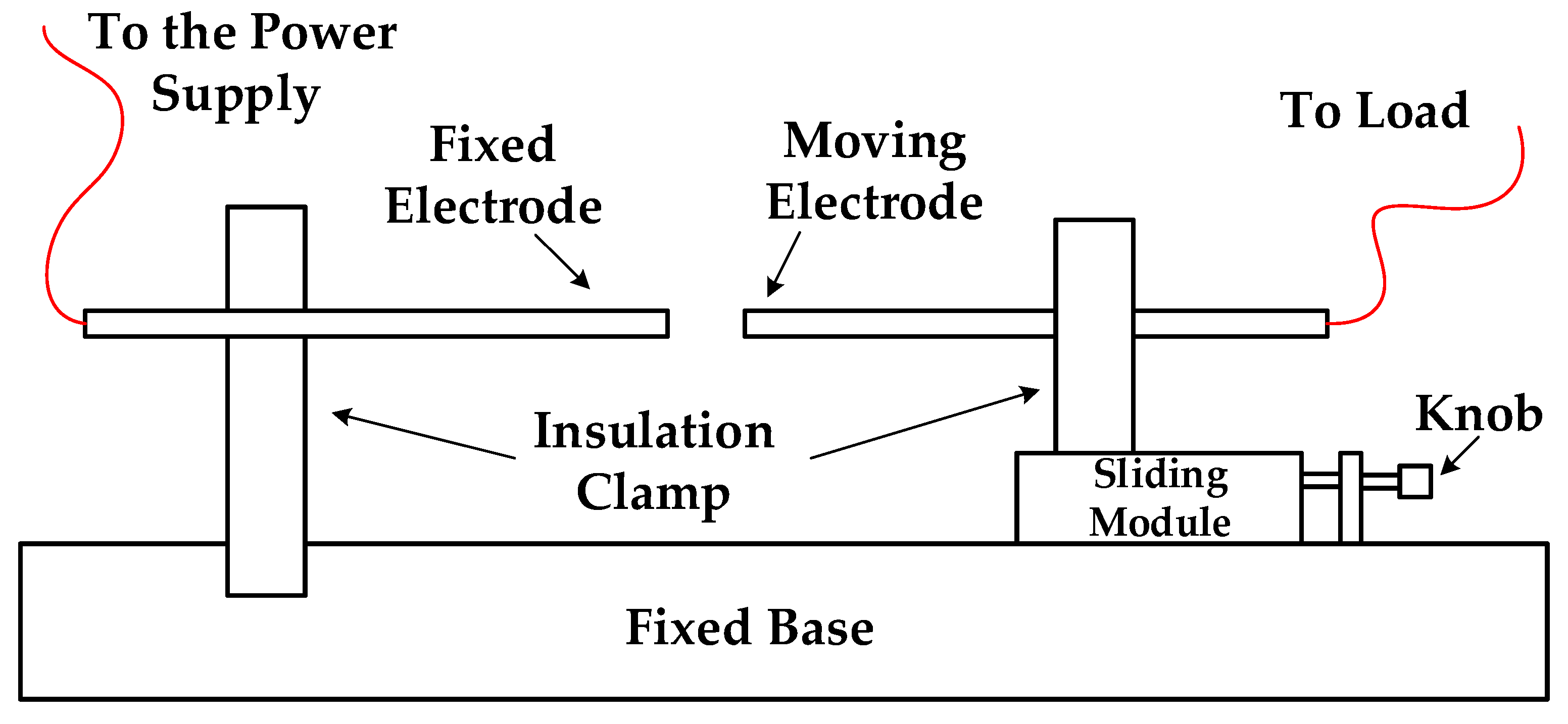
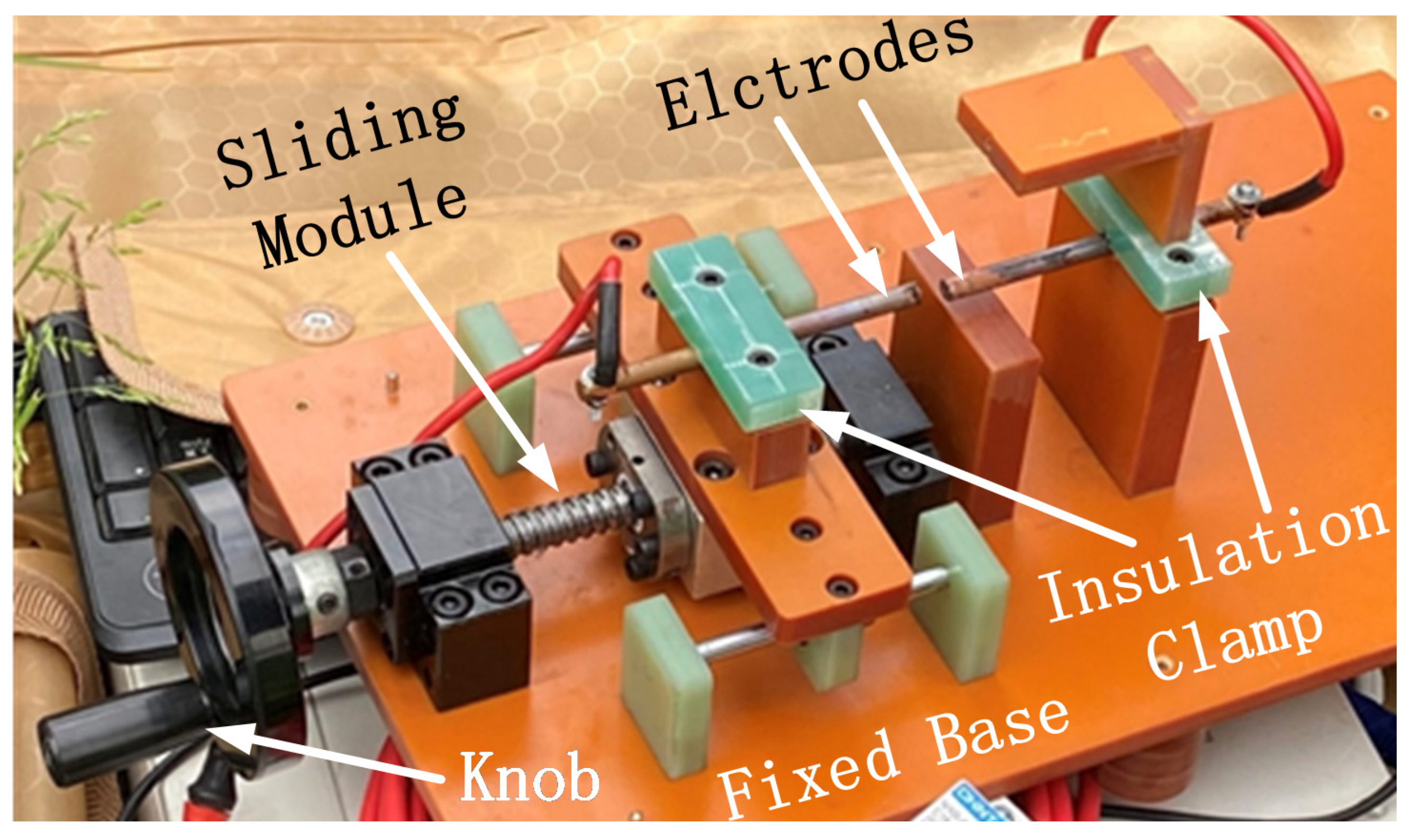
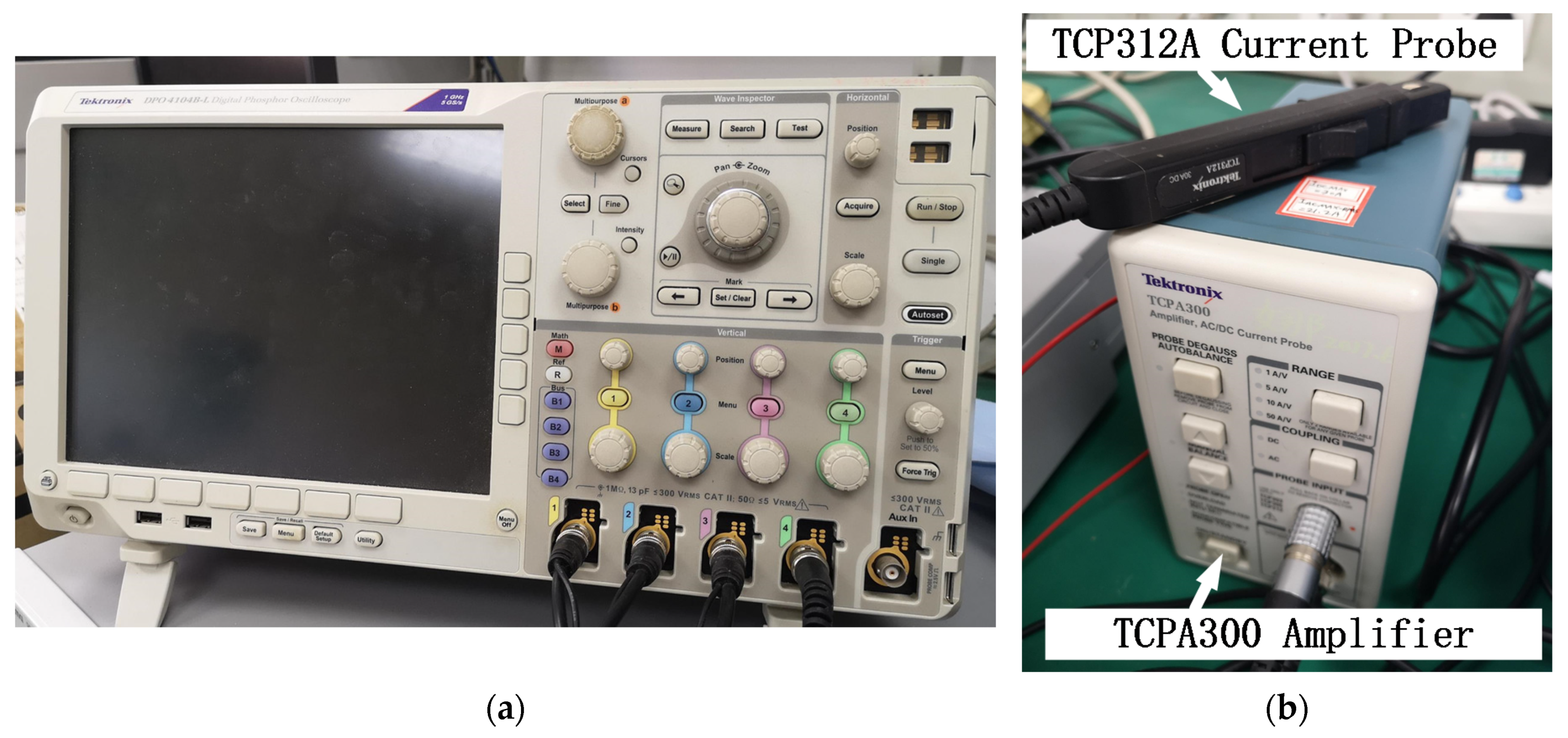
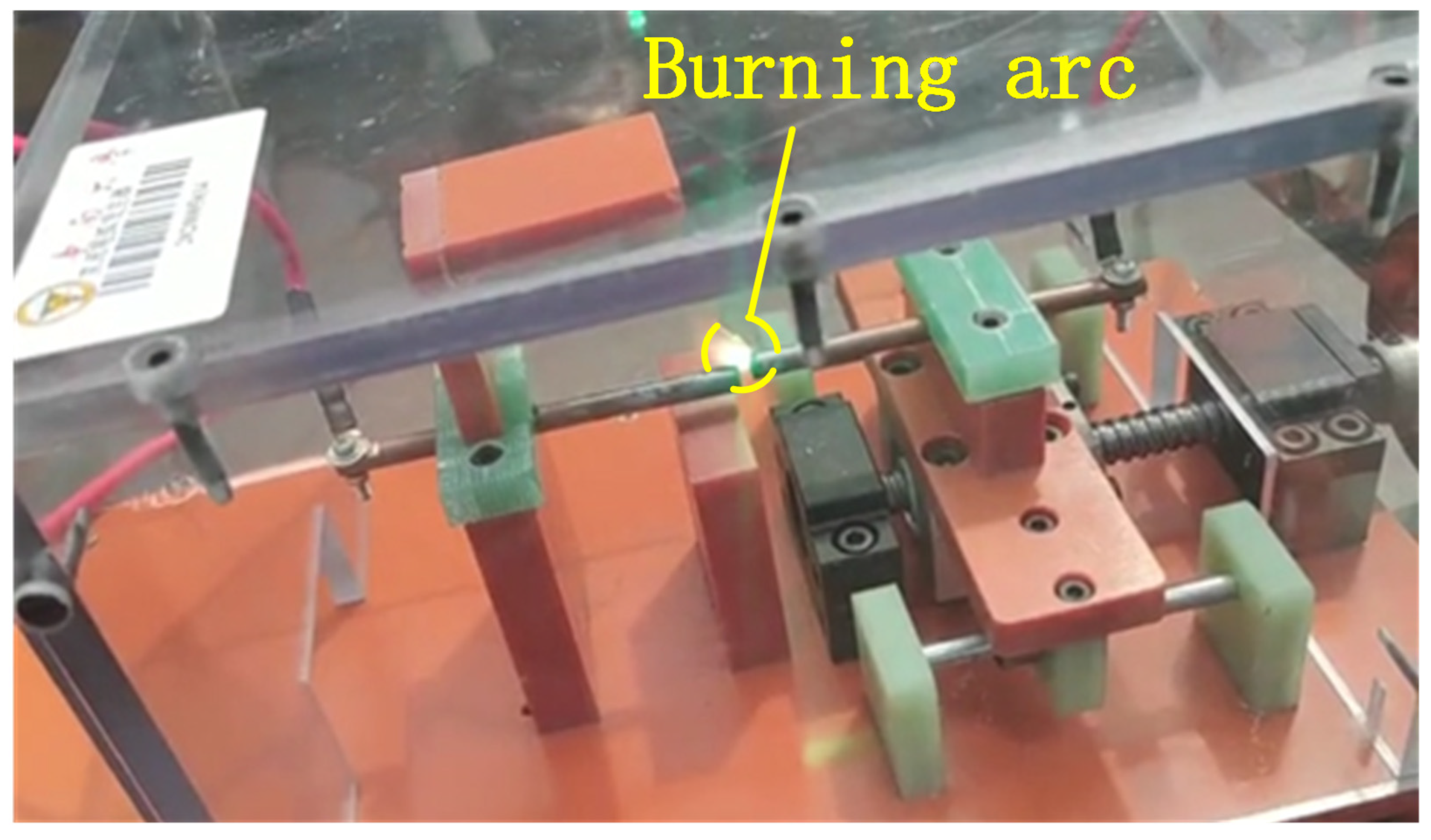
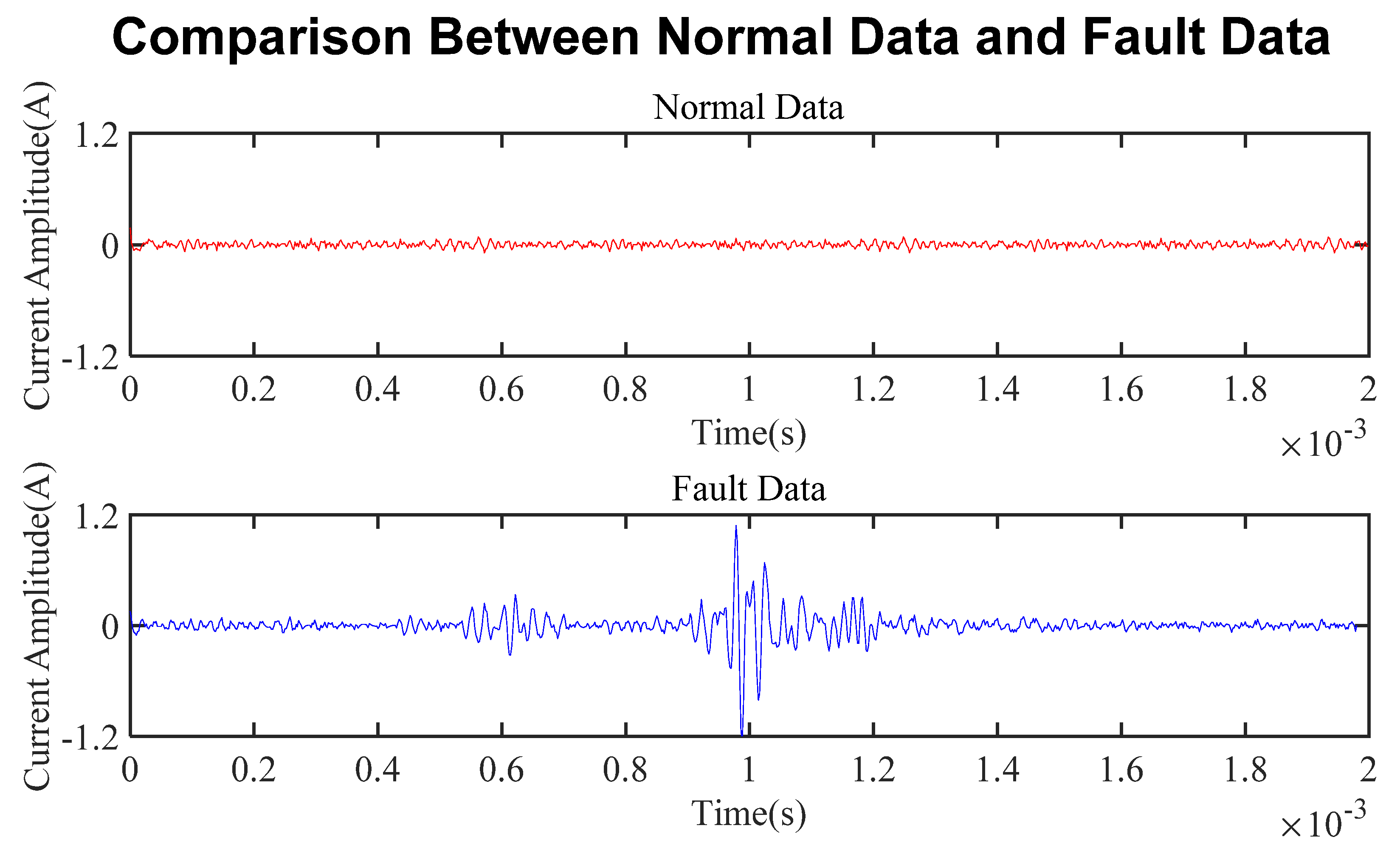
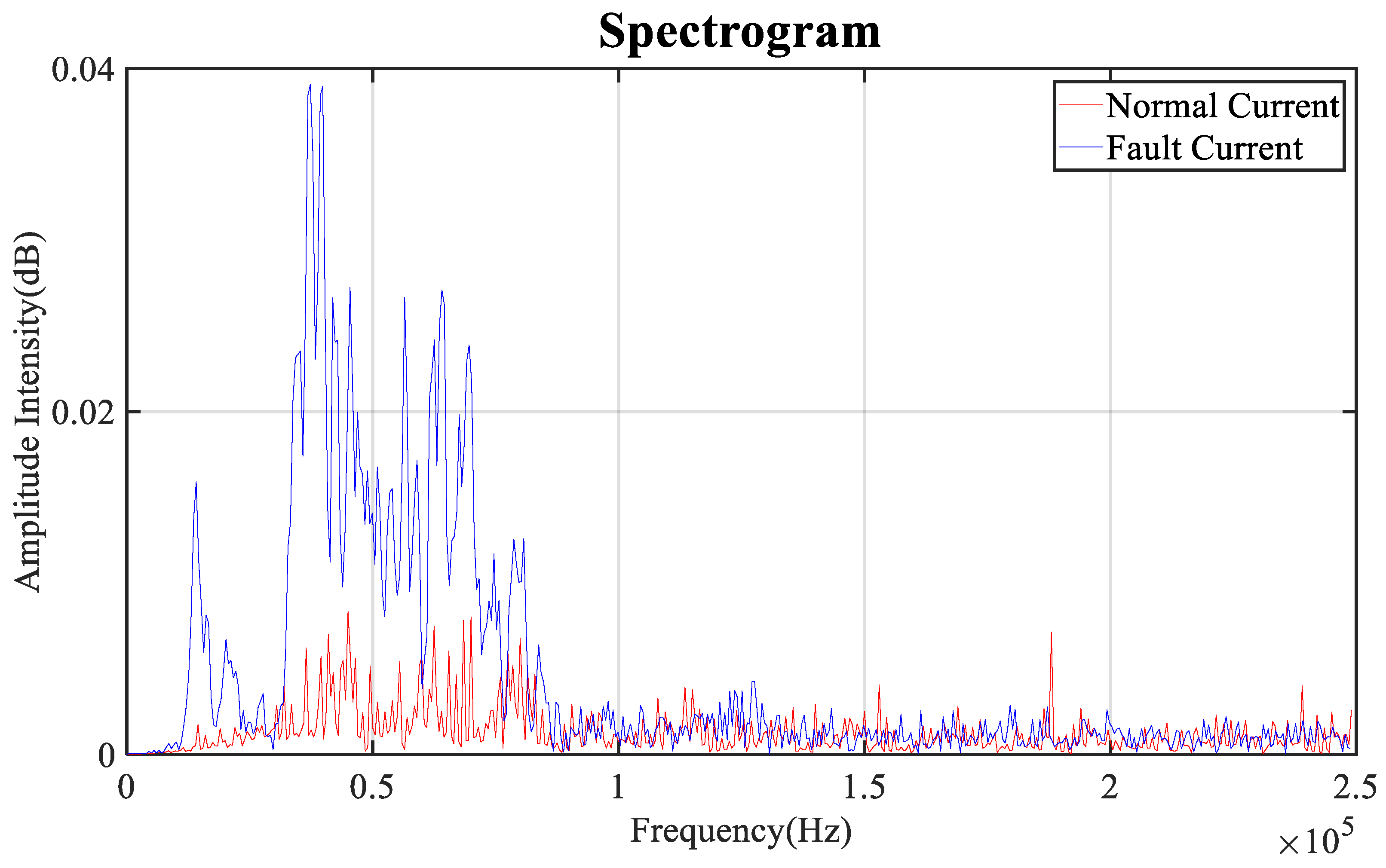
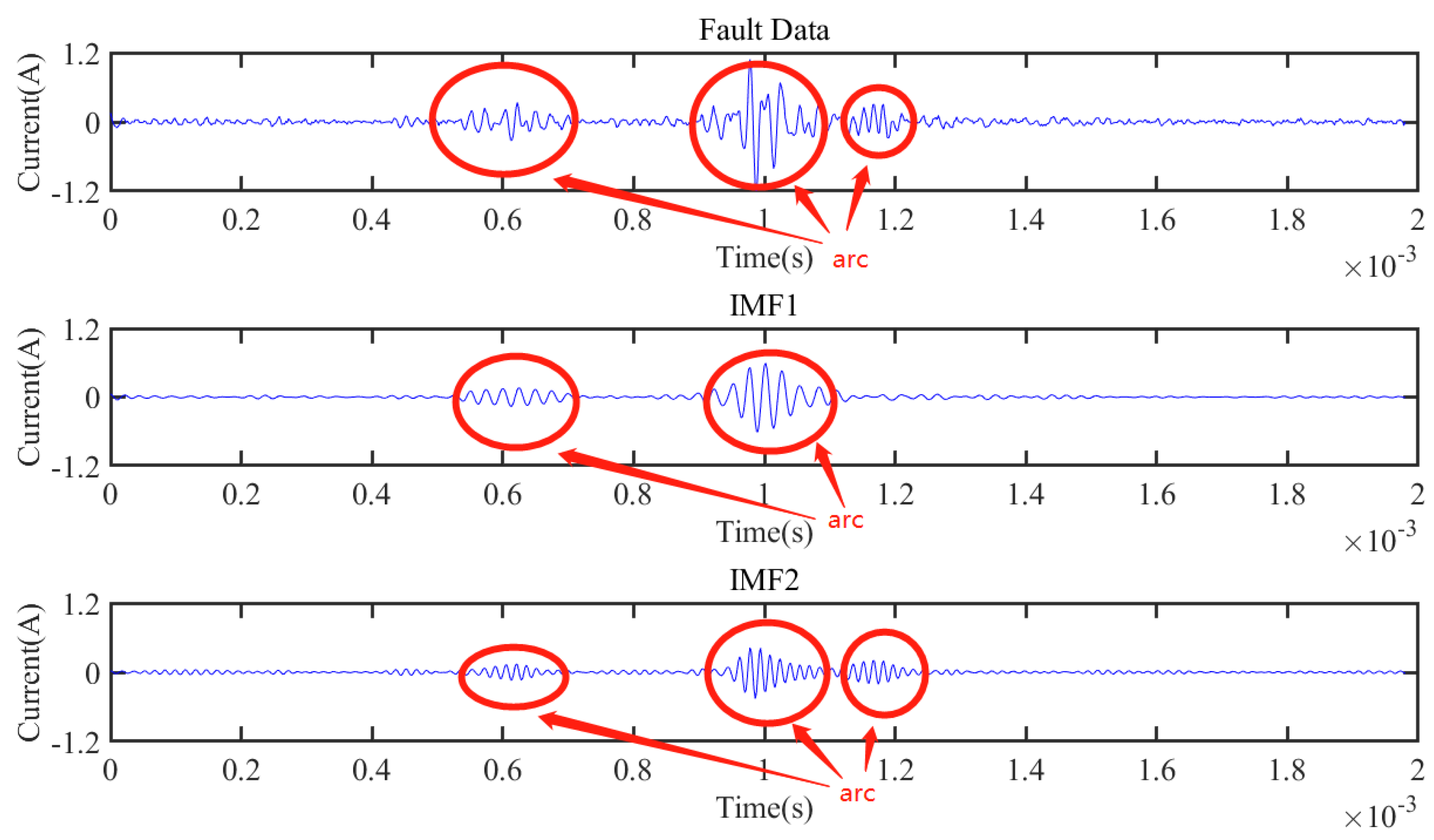
2.1. Arc Fault Data Feature Analysis
2.2. Variational Model Decomposition
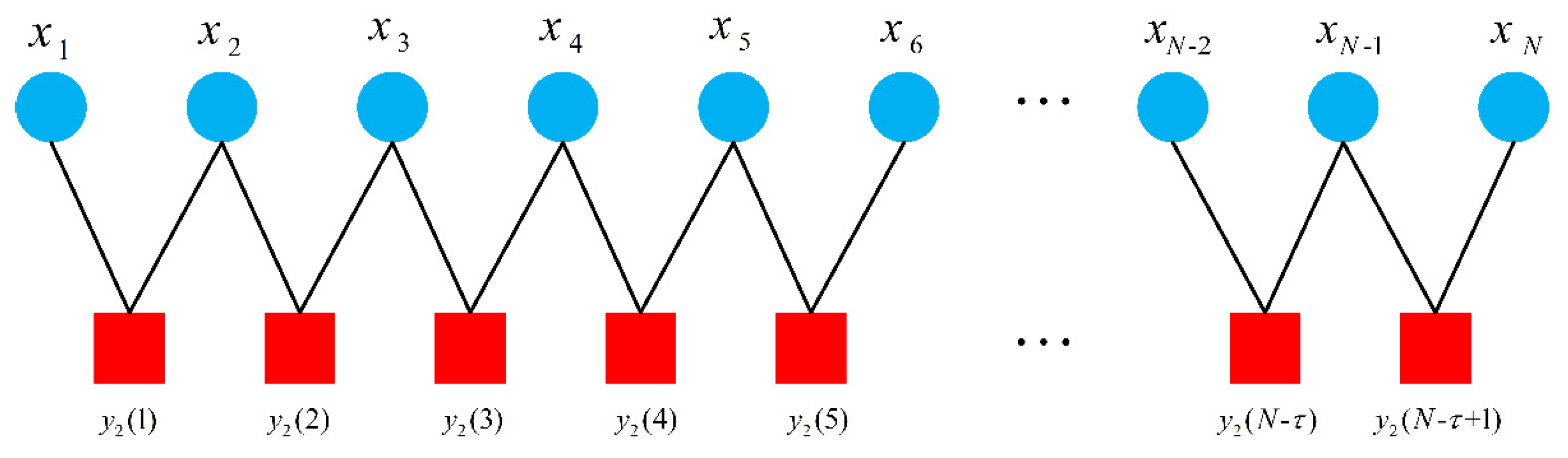
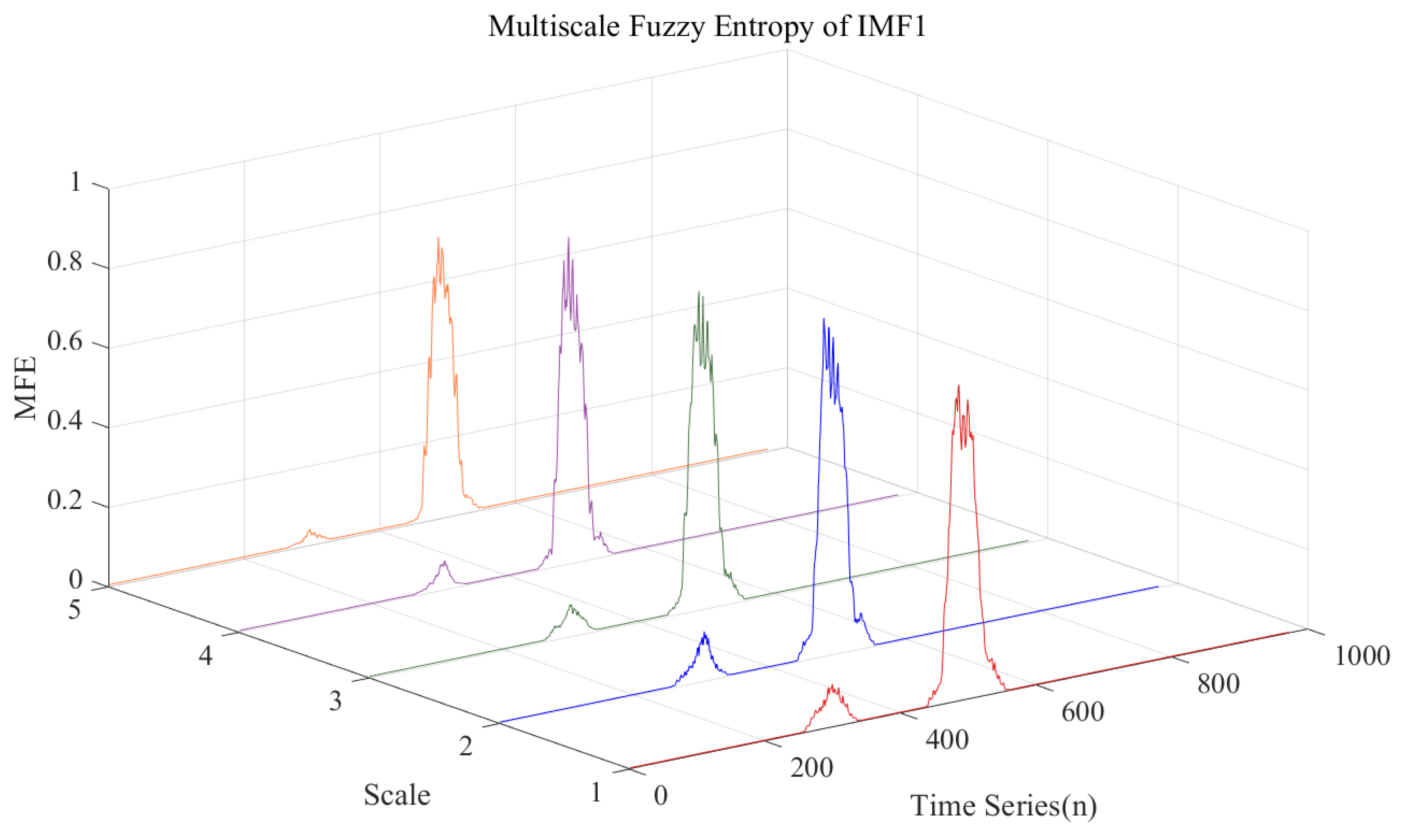
2.3. Multi-Scale Fuzzy Entropy
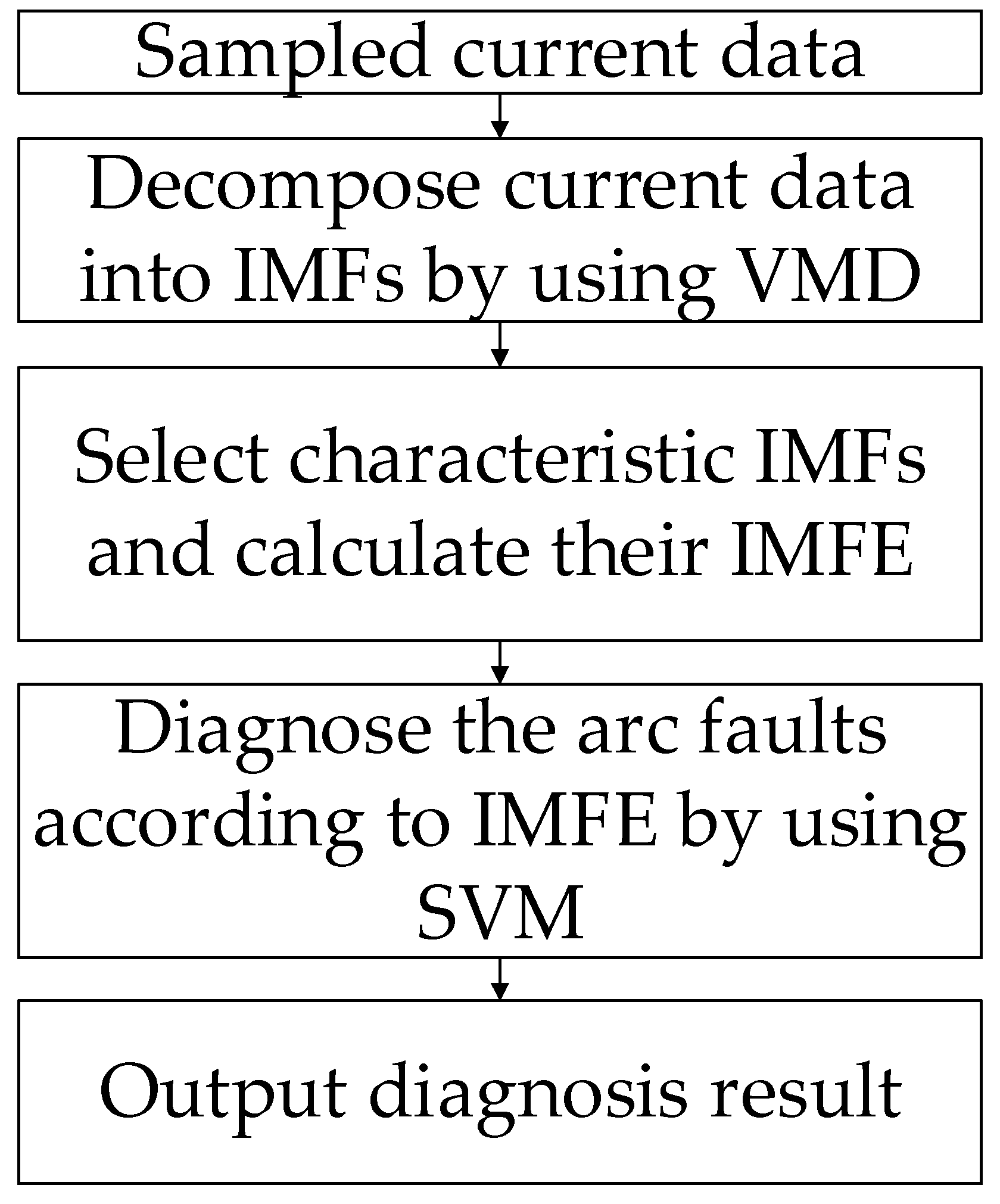
2.4. The Steps of Arc Fault Diagnosis Algorithm
3. The Validation of the Arc Fault Diagnosis Algorithm
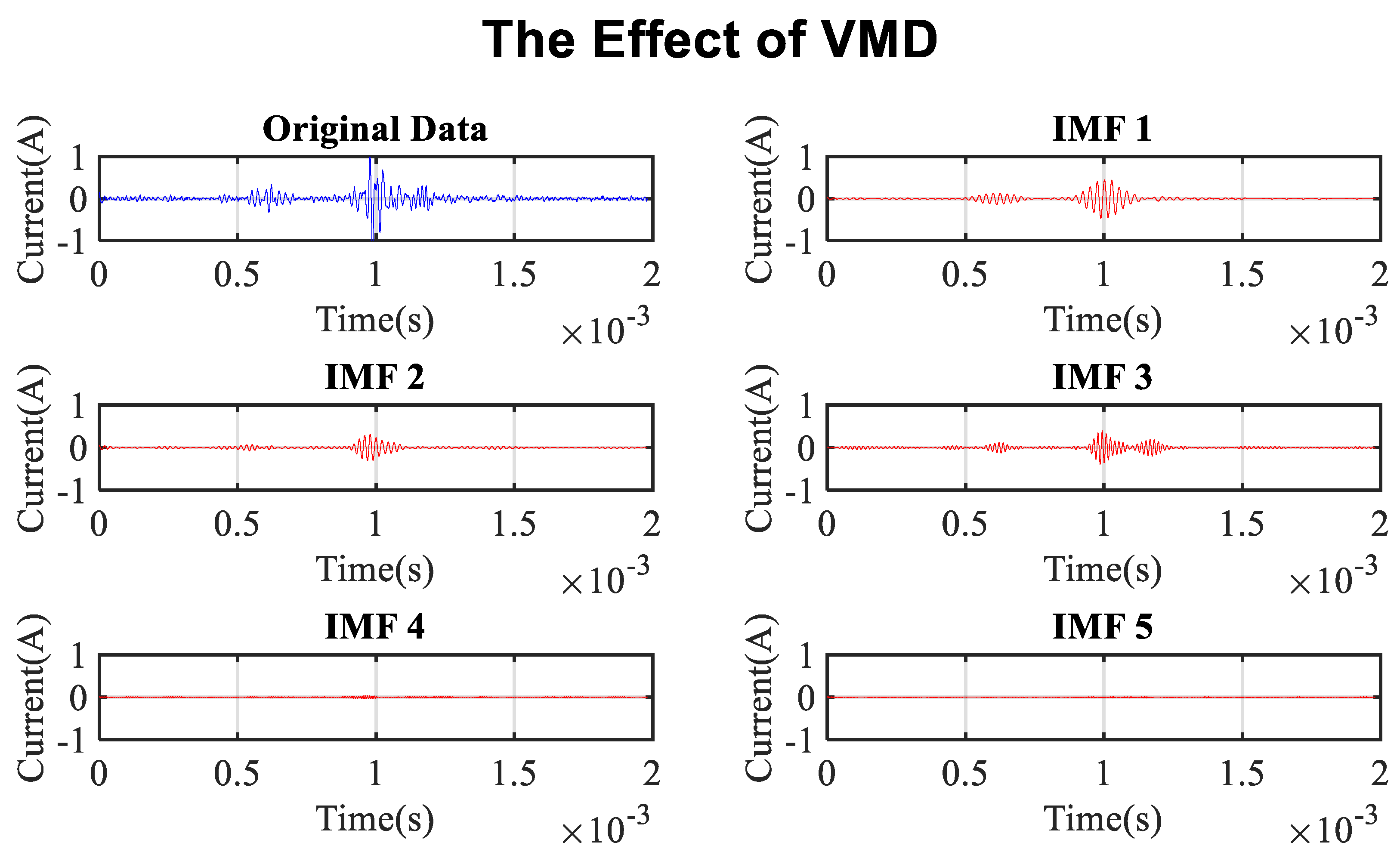
3.1. VMD Parameter Selection
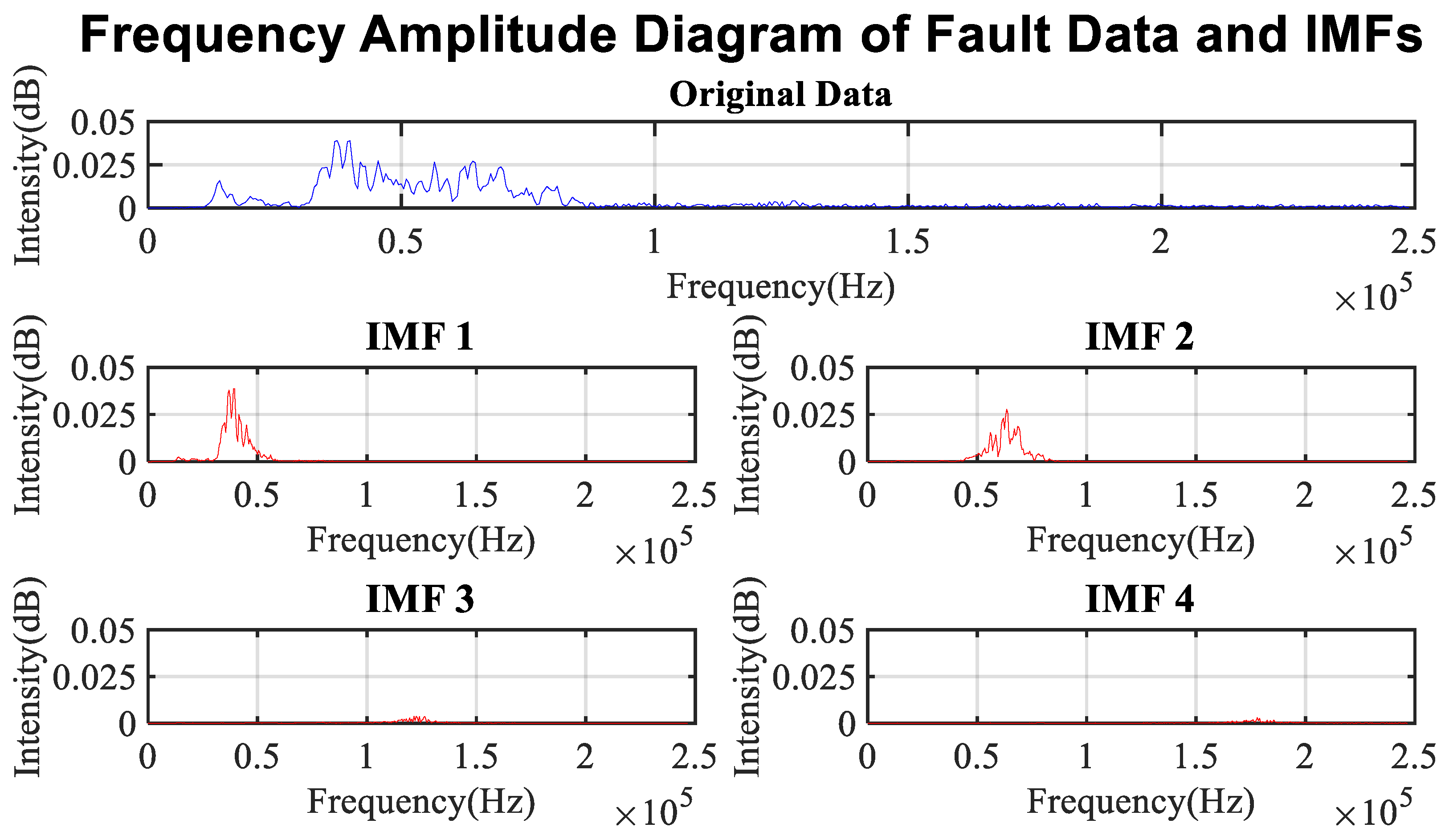
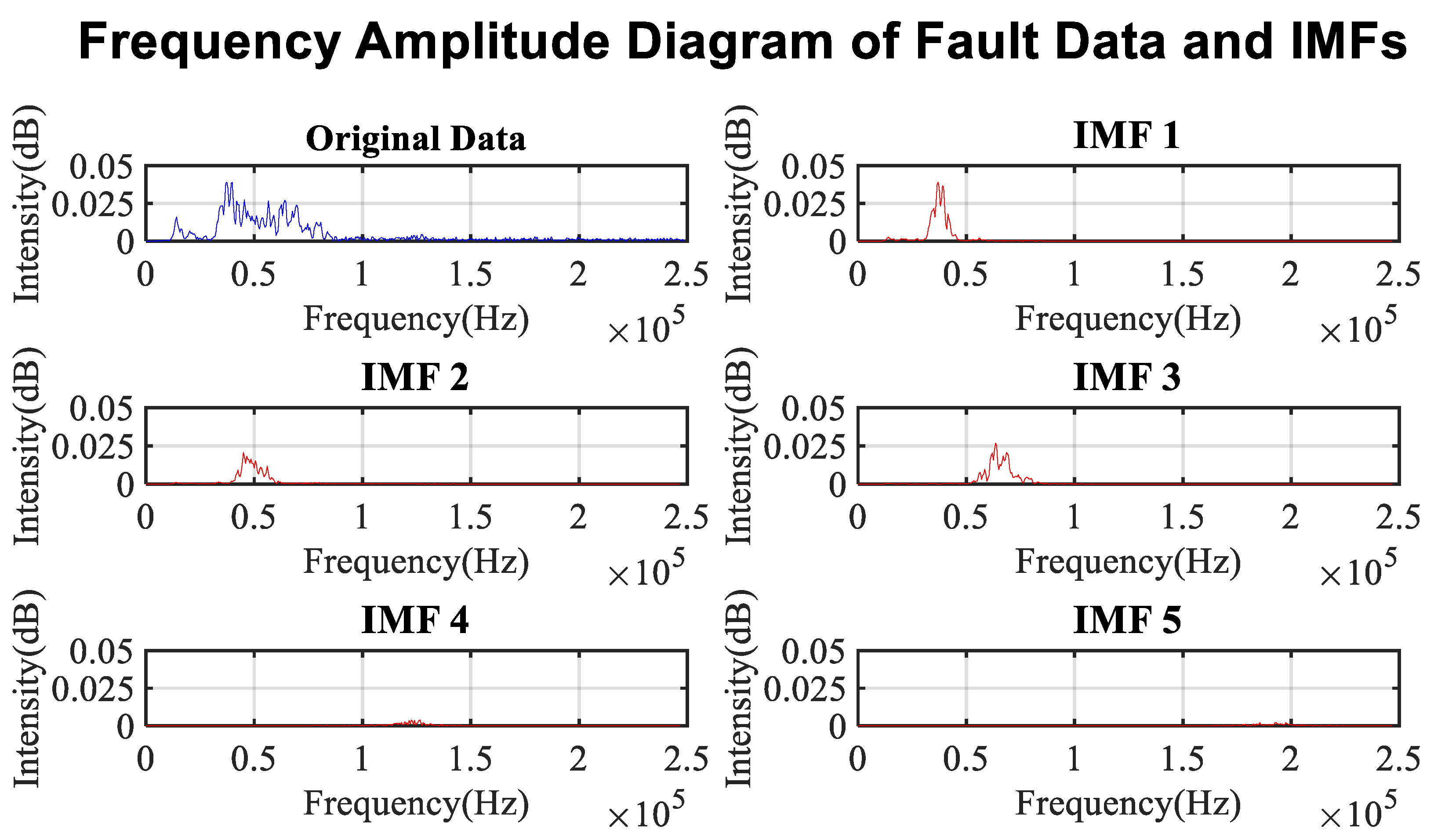
3.2. Selection of IMF and Calculation of IMFE
3.3. Fault Diagnosis and Validation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- PVPS; Kaizuka, I.; Jäger, W.A. Snapshot of Global PV Markets. 2020. Available online: https://www.researchgate.net/publication/324728482_2017_SNAPSHOT_OF_GLOBAL_PHOTOVOLTAIC_MARKETS (accessed on 8 July 2021).
- Taylor, M.; Ralon, P.; Ilas, A. The Power to Change: Solar and Wind Cost Reduction Potential to 2025. International Renewable Energy Agency, 2016; p. 3. Available online: https://www.irena.org/publications/2016/Jun/The-Power-to-Change-Solar-and-Wind-Cost-Reduction-Potential-to-2025 (accessed on 8 July 2021).
- Hossam, A.A.; Ahmed, E.E.; Ibrahim, B.M.T. A new monitoring technique for fault detection and classification in PV systems based on rate of change of voltage-current trajectory. Int. J. Electr. Power Energy Syst. 2021, 133. [Google Scholar] [CrossRef]
- Shi, Y.; Sun, Y.; Liu, J.; Du, X. Model and stability analysis of grid-connected PV system considering the variation of solar irradiance and cell temperature. Int. J. Electr. Power Energy Syst. 2021, 132. [Google Scholar] [CrossRef]
- Jiang, Y.; Kang, L.; Liu, Y. The coordinated optimal design of a PV-battery system with multiple types of PV arrays and batteries: A case study of power smoothing. J. Clean. Prod. 2021, 310. [Google Scholar] [CrossRef]
- Haffaf, A.; Lakdja, F.; Abdeslam, D.O.; Meziane, R. Monitoring, measured and simulated performance analysis of a 2.4 kWp grid-connected PV system installed on the Mulhouse campus, France. Energy Sustain. Dev. 2021, 62, 44–55. [Google Scholar] [CrossRef]
- Houssein, E.H.; Mahdy, M.A.; Fathy, A.; Rezk, H. A modified Marine Predator Algorithm based on opposition based learning for tracking the global MPP of shaded PV system. Expert Syst. Appl. 2021, 183. [Google Scholar] [CrossRef]
- Yurtseven, K.; Karatepe, E.; Deniz, E. Sensorless fault detection method for photovoltaic systems through mapping the inherent characteristics of PV plant site: Simple and practical. Sol. Energy 2021, 216, 96–110. [Google Scholar] [CrossRef]
- Shapiro, F.R.; Radibratovic, B. DC arc flash hazards and protection in photovoltaic systems. In Proceedings of the 2013 IEEE 39th Photovoltaic Specialists Conference (PVSC), Tampa Bay, FL, USA, 16–21 June 2013. [Google Scholar]
- Lu, S.; Phung, B.T.; Zhang, D. A comprehensive review on DC arc faults and their diagnosis methods in photovoltaic systems. Renew. Sustain. Energy Rev. 2018, 89, 88–98. [Google Scholar] [CrossRef]
- Dhar, S.; Patnaik, R.K.; Dash, P.K. Fault detection and location of photovoltaic based DC microgrid using differential protection strategy. IEEE Trans Smart Grid 2018, 9, 4303–4312. [Google Scholar] [CrossRef]
- Mu, L.; Wang, Y.; Jiang, W.; Zhang, F. Study on characteristics and detection method of DC arc fault for photovoltaic system. Proc. CSEE 2016, 36, 5236–5244. [Google Scholar]
- Lu, S.; Ma, R.; Sirojan, T.; Phung, B.T.; Zhang, D. Lightweight transfer nets and adversarial data augmentation for photovoltaic series arc fault detection with limited fault data. Int. J. Electr. Power Energy Syst. 2021, 130. [Google Scholar] [CrossRef]
- Humbert, J.B.; Schweitzer, P.; Weber, S. Serial-arc detection by use of Spectral Dispersion Index (SDI) analysis in a low-voltage network (270V HVDC). Electr. Power Syst. Res. 2021, 196. [Google Scholar] [CrossRef]
- Chen, S.; Li, X.; Meng, Y.; Xie, Z. Wavelet-based protection strategy for series arc faults interfered by multicomponent noise signals in grid-connected photovoltaic systems. Sol. Energy 2019, 183, 327–336. [Google Scholar] [CrossRef]
- Goodman, M. How ultrasound can detect electrical discharge non-invasively and help eliminate arc flash incidents. In Proceedings of the 2007 Electrical Insulation Conference and Electrical Manufacturing Expo, Nashville, TN, USA, 22–24 October 2007. [Google Scholar]
- Panetta, S. Design of arc Flash protection system using solid state switch, photo detection, with parallel impedance. In Proceedings of the 2013 IEEE IAS Electrical Safety Workshop, Dallas, TX, USA, 11–15 March 2013. [Google Scholar]
- Restrepo, C.E. Arc Fault detection and discrimination methods. In Electrical Contacts-2007. In Proceedings of the 53rd IEEE Holm Conference on Electrical Contacts, Pittsburgh, PA, USA, 16–19 September 2007. [Google Scholar]
- Xiong, Q.; Ji, S.; Zhu, L.; Zhong, L.; Liu, Y. A novel DC arc fault detection method based on electromagnetic radiation signal. IEEE Trans. Plasma Sci. 2017, 45, 472–478. [Google Scholar] [CrossRef]
- Guo, S.Y.; Jones III, J.L.; Dooley, A.S. DC arc Detection and Prevention Circuit and Method. U.S. Patent 6,683,766 B1, 27 January 2004. [Google Scholar]
- Zhen, M.; Li, W.; Qiang, G.S. The characteristics of DC arc faults current. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013. [Google Scholar]
- Yao, X.; Herrera, L.; Ji, S.; Zou, K.; Wang, J. Characteristic study and time-domain discrete-wavelet-transform based hybrid detection of series DC arc faults. IEEE Trans. Power Electron. 2014, 29, 3103–3115. [Google Scholar] [CrossRef]
- Chae, S.; Park, J.; Oh, S. Series DC Arc fault detection algorithm for DC microgrids using relative magnitude comparison. IEEE Trans. Emerg. Sel. Top. Power Electron. 2016, 4, 1270–1278. [Google Scholar] [CrossRef]
- Aarstad, C.; Taufik, T.; Kean., A. Development of arc fault interrupter laboratory testing for low voltage DC electricity. In Proceedings of the 2016 International Seminar on Intelligent Technology and Its Applications (ISITIA), Lombok, Indonesia, 28–30 July 2016. [Google Scholar]
- Chen, S.; Li, X.; Xiong, J. Series arc fault identification for photovoltaic system based on time-domain and time-frequency-domain analysis. IEEE J. Photovolt. 2017, 7, 1105–1114. [Google Scholar] [CrossRef]
- Chen, S.; LI, X. PV series arc fault recognition under different working conditions with joint detection method. In Proceedings of the 2016 IEEE 62nd Holm Conference on Electrical Contacts (Holm), Clearwater Beach, FL, USA, 9–12 October 2016. [Google Scholar]
- He, C.; Mu, L.; Wang, Y. The detection of parallel arc fault in photovoltaic systems based on a mixed criterion. IEEE J. Photovolt. 2017, 7, 1717–1724. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, Z.; Balog, R.S. Real time arc fault detection in PV systems using wavelet decomposition. In Proceedings of the 2016 IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016. [Google Scholar]
- Yusof MF, M.; Kamaruzaman, M.A.; Ishak, M.; Ghazali, M.F. Porosity detection by analyzing arc sound signal acquired during the welding process of gas pipeline steel. Int. J. Adv. Manuf. Technol. 2017, 89, 3661–3670. [Google Scholar] [CrossRef] [Green Version]
- Thomas, S.R.; Kurupath, V.; Nair, U. A passive islanding detection method based on K-means clustering and EMD of reactive power signal. Sustain. Energy Grids Netw. 2020, 23. [Google Scholar] [CrossRef]
- Dibaj, A.; Hassannejad, R.; Ettefagh, M.M.; Ehghaghi, M.B. Incipient fault diagnosis of bearings based on parameter-optimized VMD and envelope spectrum weighted kurtosis index with a new sensitivity assessment threshold. ISA Trans. 2021, 114, 413–433. [Google Scholar] [CrossRef]
- Li, H.; Liu, T.; Wu, X.; Chen, Q. An optimized VMD method and its applications in bearing fault diagnosis. Measurement 2020, 166. [Google Scholar] [CrossRef]
- Sukriti; Chakraborty, M.; Mitra, D. Epilepsy seizure detection using kurtosis based VMD’s parameters selection and bandwidth features. Biomed. Signal Process. Control 2021, 64. [Google Scholar]
- Zhu, S.; Xia, H.; Peng, B.; Zio, E.; Wang, Z.; Jiang, Y. Feature extraction for early fault detection in rotating machinery of nuclear power plants based on adaptive VMD and Teager energy operator. Ann. Nucl. Energy 2021, 160. [Google Scholar] [CrossRef]
- Wang, Y.; Kiziltas, A.; Blanchard, P.; Walsh, T.R. Calculation of 1D and 2D densities in VMD: A flexible and easy-to-use code. Comput. Phys. Commun. 2021, 266. [Google Scholar] [CrossRef]
- Shi, G.; Qin, C.; Tao, J.; Liu, C. A VMD-EWT-LSTM-based multi-step prediction approach for shield tunneling machine cutterhead torque. Knowl. Based Syst. 2021. [Google Scholar] [CrossRef]
- Pincus, S. Approximate entropy (ApEn) as a complexity measure. Chaos 1995, 5, 110–117. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. 2000, 278, 2039–2049. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xie, H.B.; He, W.X.; Liu, H. Measuring time series regularity using nonlinear similarity-based sample entropy. Mod. Phys. Lett. 2008, 372, 7140–7146. [Google Scholar] [CrossRef]
- Chen, W.; Zhuang, J.; Yu, W.; Wang, Z. Measuring complexity using FuzzyEn, ApEn, and SampEn. Med. Eng. Phys. 2008, 31, 61–68. [Google Scholar] [CrossRef]
- Chang, C.C.; Lin, C.J. Libsvm. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Luna, B.V.; Monroy-Morales, J.L.; Madrigal Martínez, M.; Torres-Lucio, D.; Weber, S.; Schweitzer, P. Analysis of Internal Signal Perturbations in DC/DC and DC/AC Converters under Arc Fault. Energies 2021, 14, 3005. [Google Scholar] [CrossRef]
- Glowacz, A. Ventilation Diagnosis of Angle Grinder Using Thermal Imaging. Sensors 2021, 21, 2853. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.-C.; Kwak, S.-S. Frequency-Domain Characteristics of Series DC Arcs in Photovoltaic Systems with Voltage-Source Inverters. Appl. Sci. 2020, 10, 8042. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| K Value | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 |
|---|---|---|---|---|---|
| K = 1 | 40.7 kHz | N/A | N/A | N/A | N/A |
| K = 2 | 39.3 kHz | 64.1 kHz | N/A | N/A | N/A |
| K = 3 | 39.3 kHz | 64.1 kHz | 122.4 kHz | N/A | N/A |
| K = 4 | 39.3 kHz | 64.1 kHz | 121.9 kHz | 179.3 kHz | N/A |
| K = 5 | 37.9 kHz | 48.8 kHz | 65.8 kHz | 123.3 kHz | 193.9 kHz |
| Type | Label | IMF1 | IMF2 | IMF3 | IMF4 |
|---|---|---|---|---|---|
| normal | 1 | 42.2 kHz | 64.5 kHz | 125.6 kHz | 187.1 kHz |
| normal | 2 | 41.7 kHz | 65.0 kHz | 124.3 kHz | 190.4 kHz |
| normal | 3 | 42.8 kHz | 64.1 kHz | 125.2 kHz | 179.5 kHz |
| fault | 1 | 42.2 kHz | 64.7 kHz | 126.7 kHz | 188.1 kHz |
| fault | 2 | 42.1 kHz | 66.8 kHz | 124.1 kHz | 186.6 kHz |
| fault | 3 | 42.6 kHz | 64.3 kHz | 123.8 kHz | 183.9 kHz |
| Type | Label | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 |
|---|---|---|---|---|---|---|
| normal | 1 | 42.2 kHz | 64.1 kHz | 95.7 kHz | 127.5 kHz | 187.4 kHz |
| normal | 2 | 41.7 kHz | 64.8 kHz | 105.2 kHz | 156.1 kHz | 203.0 kHz |
| normal | 3 | 42.9 kHz | 63.9 kHz | 110.9 kHz | 160.7 kHz | 210.0 kHz |
| fault | 1 | 40.6 kHz | 55.4 kHz | 66.9 kHz | 128.9 kHz | 188.2 kHz |
| fault | 2 | 40.9 kHz | 57.6 kHz | 68.1 kHz | 124.5 kHz | 186.7 kHz |
| fault | 3 | 41.8 kHz | 60.7 kHz | 69.1 kHz | 123.8 kHz | 163.8 kHz |
| Result Type | TP | FP | TN | FN | Total |
|---|---|---|---|---|---|
| Number | 985 | 11 | 529 | 5 | 1530 |
| Percentage | 64.4% | 0.7% | 34.6% | 0.3% | 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Qiu, H.; Yang, P.; Mu, L. Arc Fault Detection Algorithm Based on Variational Mode Decomposition and Improved Multi-Scale Fuzzy Entropy. Energies 2021, 14, 4137. https://doi.org/10.3390/en14144137
Wang L, Qiu H, Yang P, Mu L. Arc Fault Detection Algorithm Based on Variational Mode Decomposition and Improved Multi-Scale Fuzzy Entropy. Energies. 2021; 14(14):4137. https://doi.org/10.3390/en14144137
Chicago/Turabian StyleWang, Lina, Hongcheng Qiu, Pu Yang, and Longhua Mu. 2021. "Arc Fault Detection Algorithm Based on Variational Mode Decomposition and Improved Multi-Scale Fuzzy Entropy" Energies 14, no. 14: 4137. https://doi.org/10.3390/en14144137
APA StyleWang, L., Qiu, H., Yang, P., & Mu, L. (2021). Arc Fault Detection Algorithm Based on Variational Mode Decomposition and Improved Multi-Scale Fuzzy Entropy. Energies, 14(14), 4137. https://doi.org/10.3390/en14144137