1. Introduction
Hitherto, lots of the maximum power point tracking (MPPT) methods have been presented for different kinds of photovoltaic (PV) systems. They are usually classified as the conventional methods, intelligent methods, and other methods [
1,
2]. The constant voltage (CV) method [
3], perturbation and observation (P&O) method [
4], incremental conduction (INC) method [
5], and so on belong to the first group. The fuzzy logic control (FLC) method [
6], particle swarm optimization (PSO) method [
7], iterative learning control (ILC) method [
8], and so on are categorized as the second group. Besides them, there are a lot of other methods, such as the variable weather parameter (VWP) methods [
9,
10]. In these algorithms, there are a few methods concentrating on the design of linear controller or use of linear control theory. For example, an input-output linearization controller for a PV system is designed to obtain the good MPPT robustness and rapidity [
11]. Meanwhile, a robust feedback linearization controller is presented to solve the problem with a varying environment, uncertain load, and disturbed output [
12]. In addition, an input-output feedback linear control method is proposed to improve the MPPT speed and accuracy [
13]. From these works, it is obvious that the nonlinear model of PV cell is one of the root reasons why the linear controller and linear control theory cannot be widely used in the MPPT control of PV system now. To solve this problem, in this paper, a study on the use of a linear cell model to influence the circuit parameter range (CPR) is conducted. The results in this work can be used as the theory foundation to implement the overall linearization of PV system at the maximum power point (MPP).
Moreover, in some existing MPPT methods, the circuit parameters are usually involved in the MPPT control. These parameters mainly include the load resistance, bus voltage and so on. For example, a MPPT method considering the load characteristics is presented to improve the efficiency [
14]. Meanwhile, a MPPT method based on a butterfly optimization algorithm is proposed to improve the convergence speed under varying load conditions [
15]. In addition, two MPPT methods involving the direct current (DC) bus voltage are proposed in my previous works [
16,
17]. However, it is usually ignored that how a successful MPPT control is influenced by the range of these circuit parameters under varying weather conditions. In practical application, it usually leads to difficulty in the parameter calculation, circuit element selection, and configuration design for PV system with MPPT control. To deal with this issue, in this paper, the ranges of the load resistance and DC bus voltage are expressed by the model parameters of the linear cell model. Obviously, this is beneficial for hardware design, theoretical research, and product installation of PV systems.
With regard to the linear model of PV cell, there are usually two main models: the piecewise linear model and the MPP linear model. The piecewise linear model has been studied and used widely for a long time now. For example, a MPPT method based on piecewise linear cell model is proposed to reduce the influence of grid frequency and motivate to microgrid [
18]. However, under varying irradiance or temperature conditions, the piecewise linear cell model has two main disadvantages: complex calculation and big error at the MPP. By contrast, they can be overcome well by the MPP linear model though there is a less use. This cell model is proposed in my previous work (Reference. [
19]) and two linear models are included: MPP Thevenin cell model (MPP-TCM) and MPP Norton cell model (MPP-NCM). However, the constraint conditions using them are not analyzed, which easily leads to misuse because the MPP must exist all the time when they are used. To sweep away this obstacle, in this paper, some expressions to guarantee the existence of the MPP are proposed for different kinds of PV systems. They disclose the relationships between circuit parameters and MPP-TCM when the MPP always exists. Clearly, this work is a follow-up study for the MPP linear cell model and plays an important role in promoting its use.
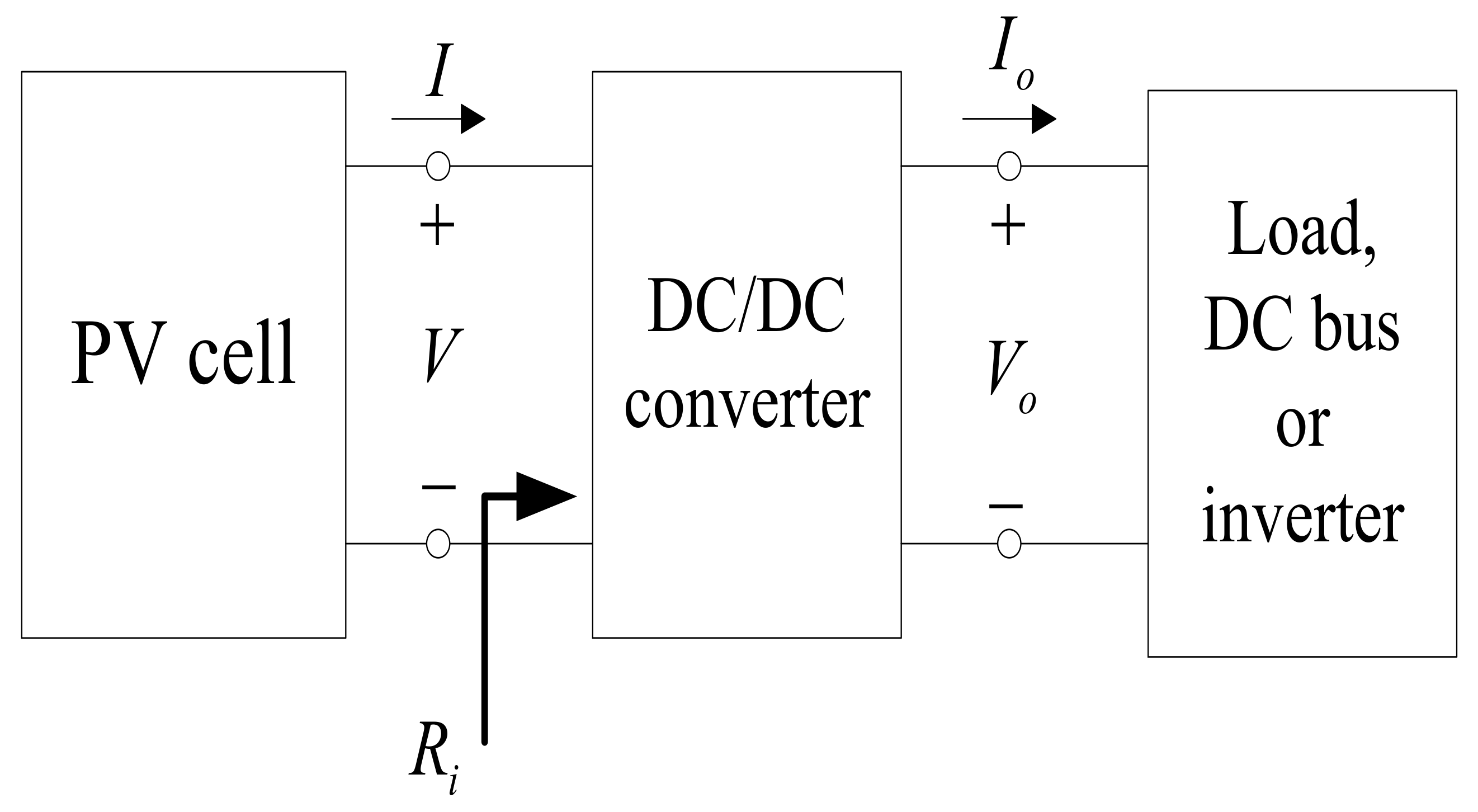
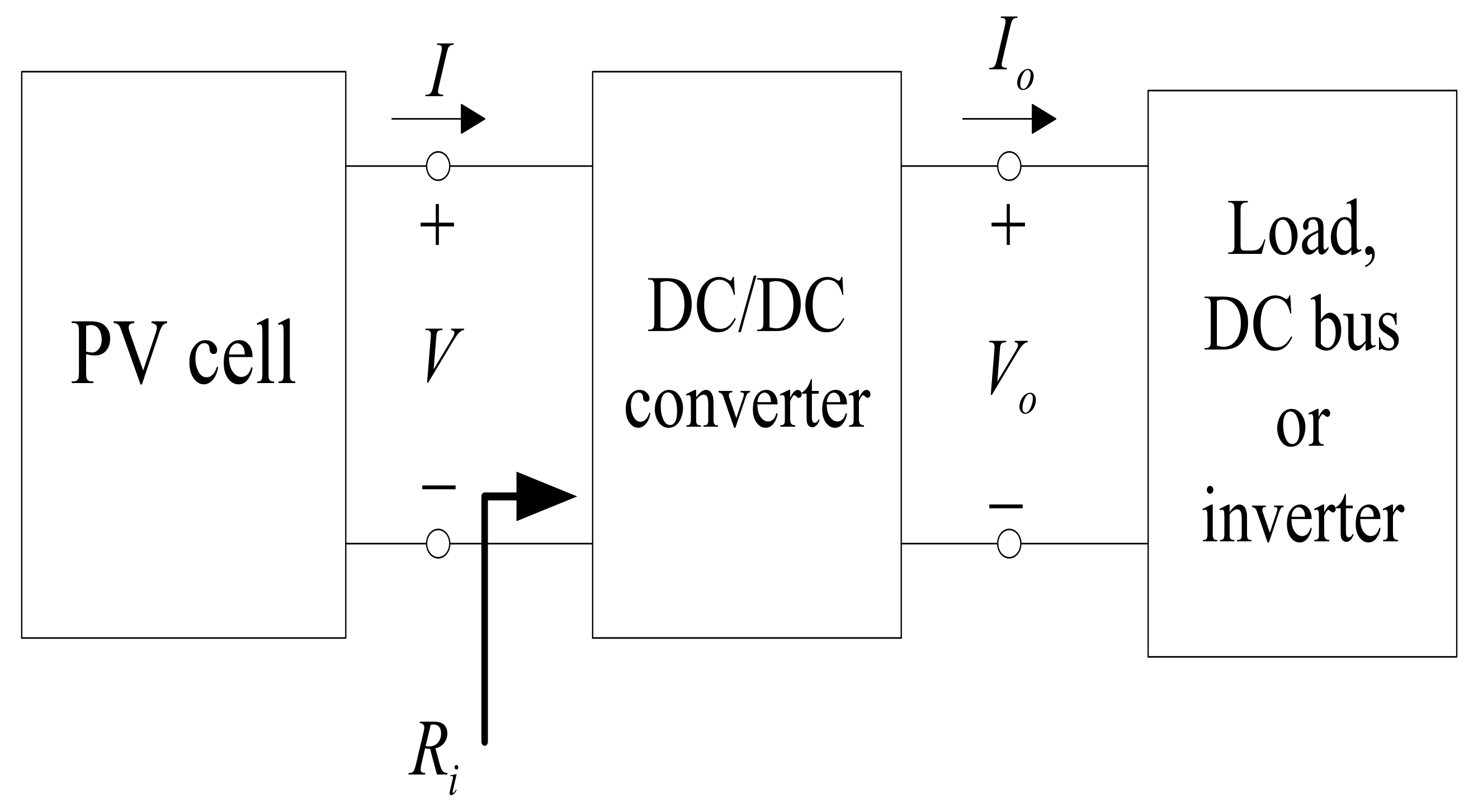
As is known to all, three basic DC/DC converters, i.e., the buck DC/DC converter, boost DC/DC converter, and buck/boost DC/DC converter, are usually used as the MPPT hardware circuits. They are usually united with a PV cell as the PV-buck system, PV-boost system, and PV-buck/boost system [
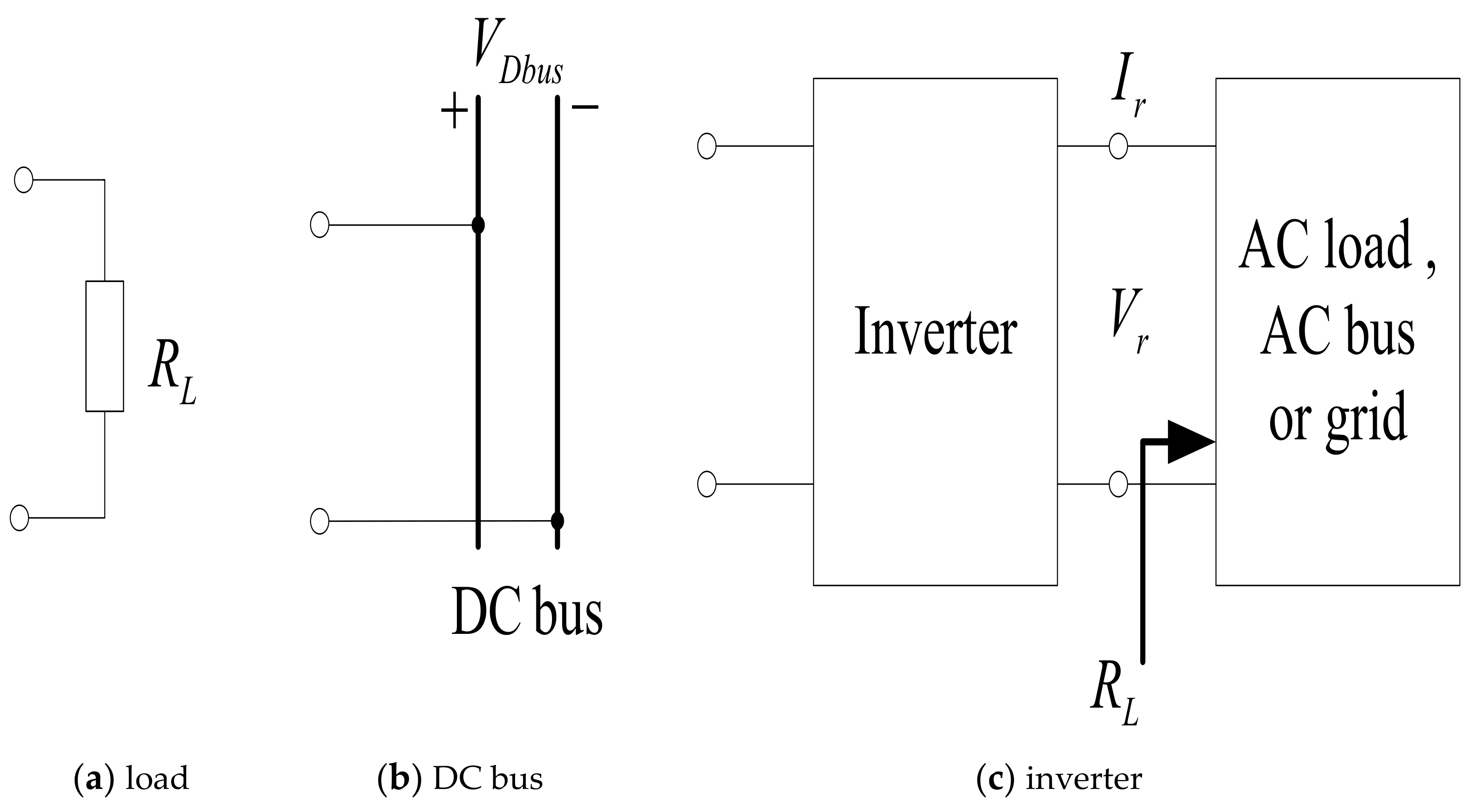
20]. Meanwhile, the inverter (INV) is usually connected with them as PV-buck-INV system, PV-boost-INV system, and PV-buck/boost-INV system [
21,
22]. In addition, a DC bus (or battery) is usually connected with them as the PV-buck-DC system, PV-boost-DC system, and PV-buck/boost-DC system [
17,
23,
24]. Here, the battery can be approximately regarded as a DC bus. However, there is no work to specially compare them from MPPT perspective. To fill in this gap, in this paper, these PV systems are selected as the research objects to analyze the influence of the system configuration to the CPR. In practical application, these results can be used as the theory foundation to select PV system with the fitting configuration.
This work is the first attempt to study the load range and DC bus range based on MPP-TCM. The innovations and contributions can be illustrated as follows:
- (1).
The expressions of the CPR based on MPP-TCM under ideal conditions are first presented. They reveal the constraints between MPP-TCM and load resistance or bus voltage when the MPP of PV system always exists under ideal conditions.
- (2).
These expressions in practical application are first proposed. Unlike ideal conditions, the nonlinear characteristics of the DC/DC converter and inverter are considered. Therefore, they provide the theoretical foundation for the use of the MPP-TCM in practical application.
- (3).
The characteristics of the CPR changing with varying weather are shown. By these results, the CPR can be estimated by the data of irradiance and temperature in a certain area. Therefore, they supply an important theory basis for the hardware design, theoretical research, and product installation of PV systems.
- (4).
The characteristics of the CPR changing with system configuration are disclosed. By these results, the area to guarantee the existence of the MPP can be estimated for PV systems with different configuration. Therefore, they are a good guide for the type selection, layout planning, and configuration design of PV systems.
The sections of this manuscript are arranged as follows. The expressions of the CPR under ideal conditions are proposed in
Section 2. Based on them, the expressions of the CPR in practical application are proposed, and maximum and minimum values of the CPR are analyzed in
Section 3. Some simulation experiments are performed to verify the accuracy of the theoretical analysis in
Section 4. Finally, some discussions and conclusions are given in
Section 5 and
Section 6, respectively.
5. Discussions
In this work, the expressions in
Table 1 are proposed under ideal DC/DC converter and inverter conditions. By contrast, the change range of the control signal of the DC/DC converter and inverter is considered to improve these results, just as
Table 2 shows. However, in terms of practical application, the MPPT control of PV system is usually influenced by some other factors, such as the installed PV power, the nonideal DC/DC converter, the nonideal inverter, the transmission efficiency and so on. Therefore, the expressions shown in
Table 1,
Table 2 and
Table 3 will be influenced by them in a certain extent. However, these factors can be ignored. There are some reasons for this, as follows. On the one hand, the theoretical research need be greatly simplified by using the ideal DC/DC converter and inverter, just as other works have been doing. On the other hand, the emphasis of this work is to disclose the constraints between MPP-TCM and load resistance or bus voltage when the MPP of PV system always exists. Obviously, the harvest of these relationships is very beneficial to study the MPPT control method with MPP-TCM. Finally, the expressions shown in
Table 1,
Table 2 and
Table 3 represent the key results. Based on them, in practical application, other factors can be easily considered and involved.
In practical application,
can be estimated and calculated by Equations (56)–(61) for PV-buck system [
10], PV-boost system, PV-buck/boost system, PV-buck-INV system, PV-boost-INV system and PV-buck/boost-INV system, respectively. Here,
and
can be approximately calculated by Equations (62) and (63), respectively [
19].
In addition, the voltage level of
in
Section 4.1.3 can be estimated under
,
and
conditions for PV-boost-INV and PV-buck/boost-INV systems. Meanwhile, it can be also estimated under
,
and
conditions for PV-buck-INV system.
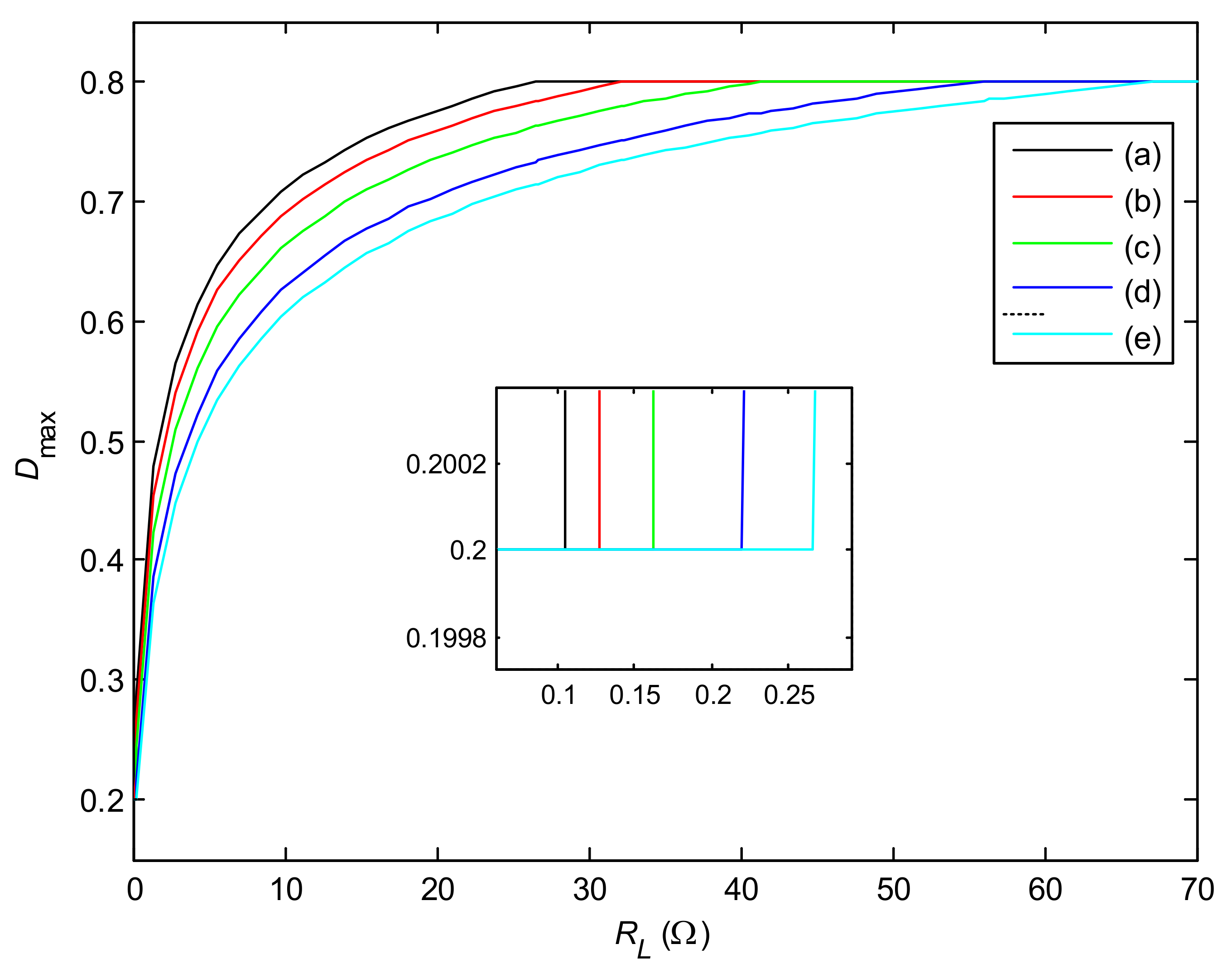
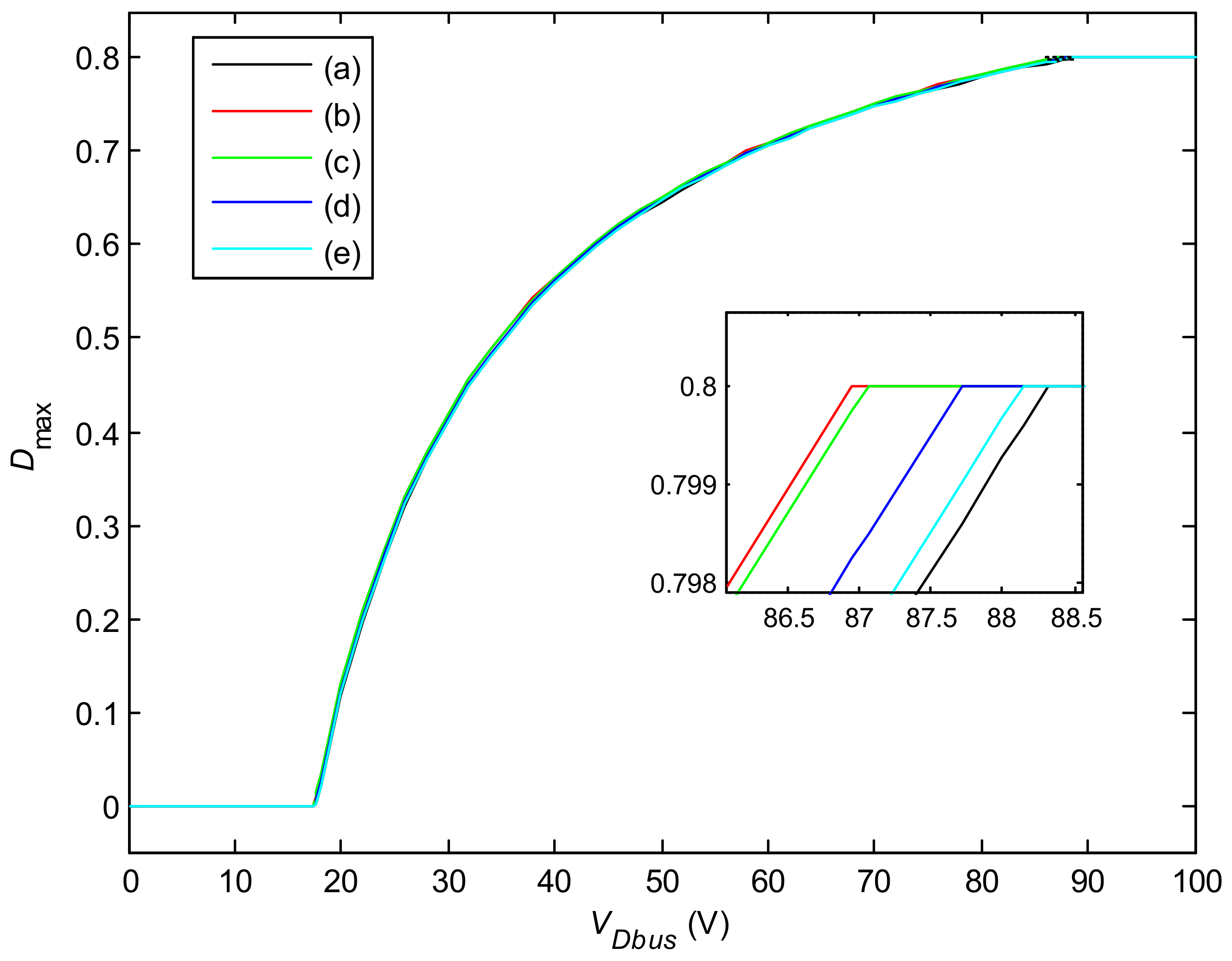
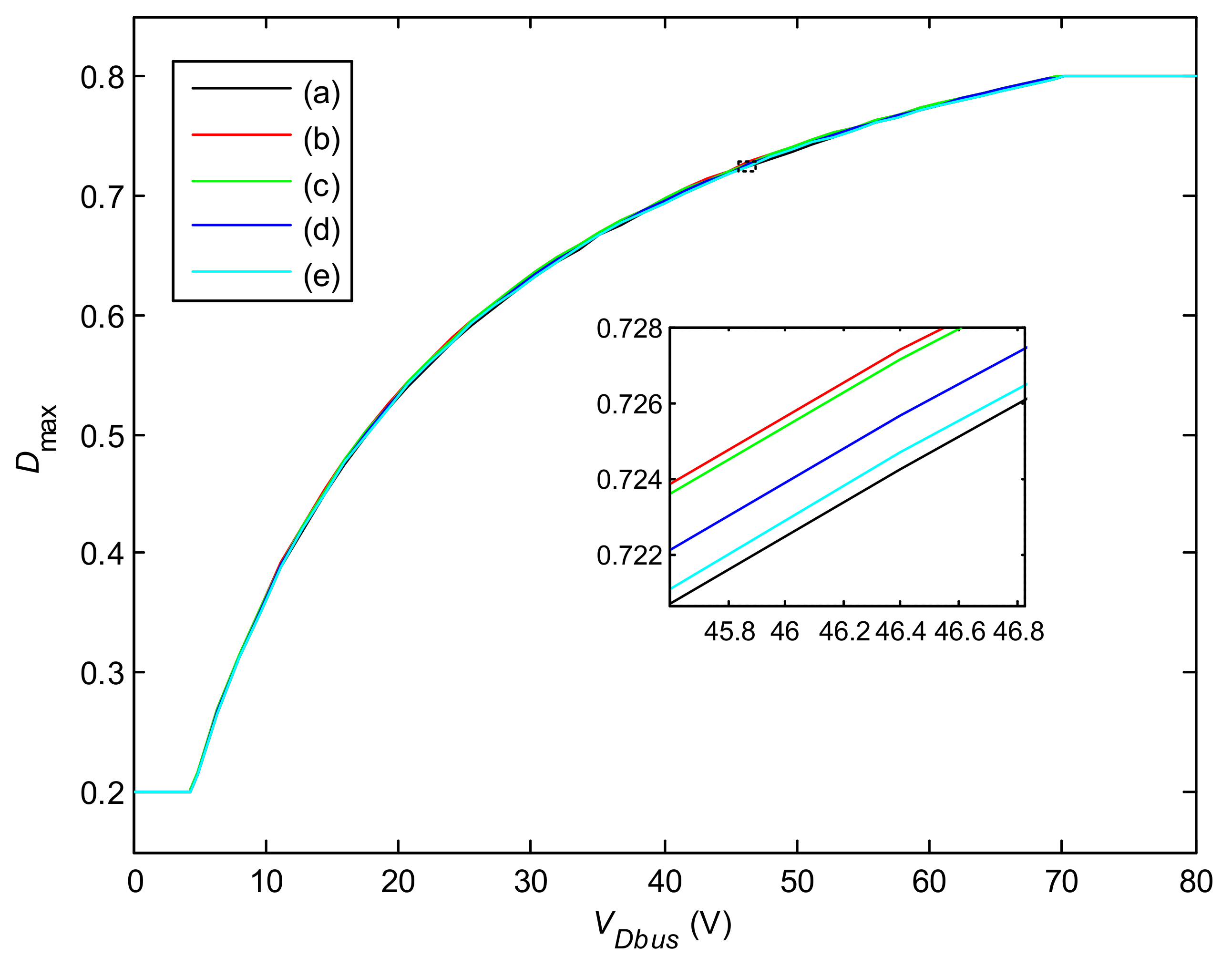
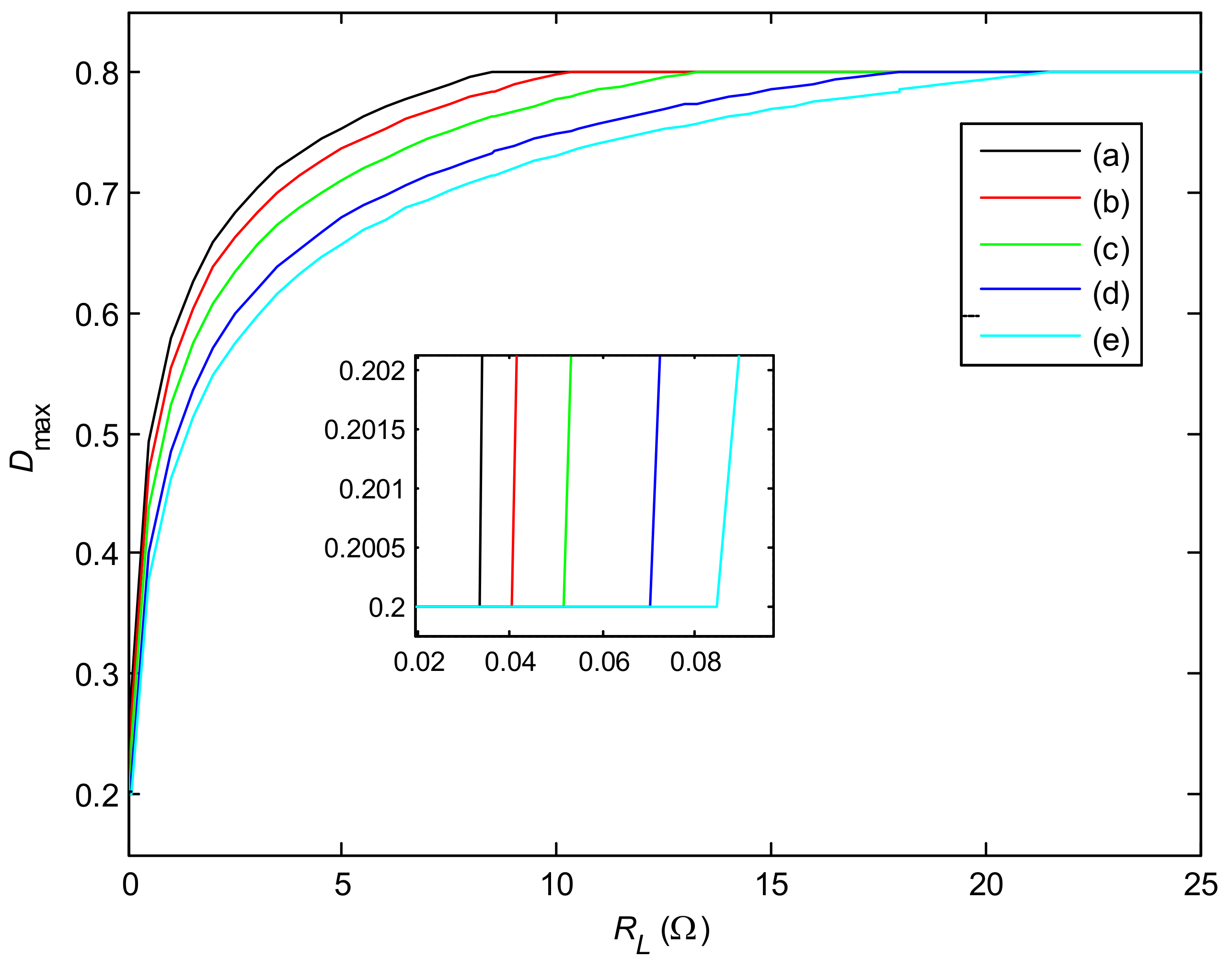
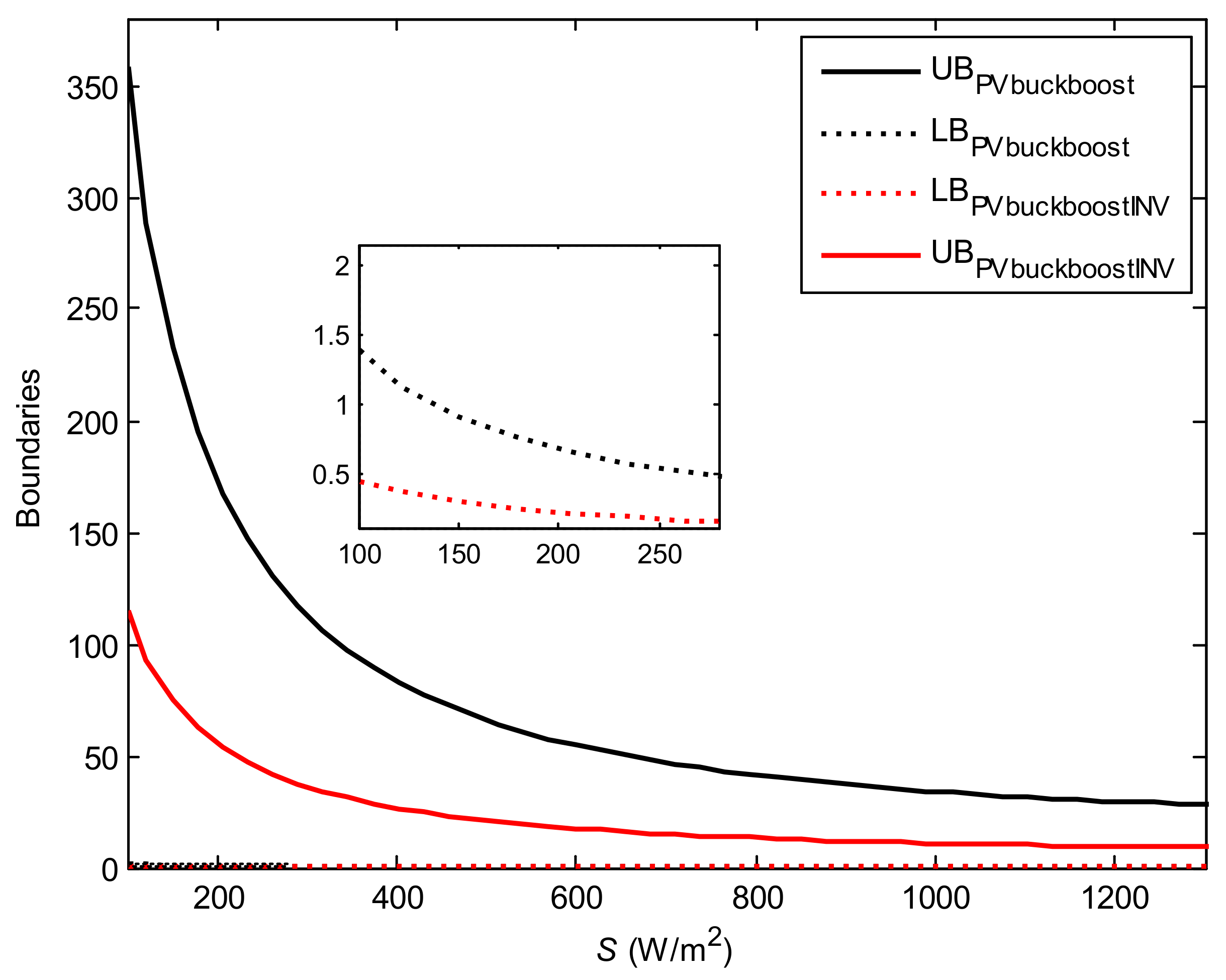
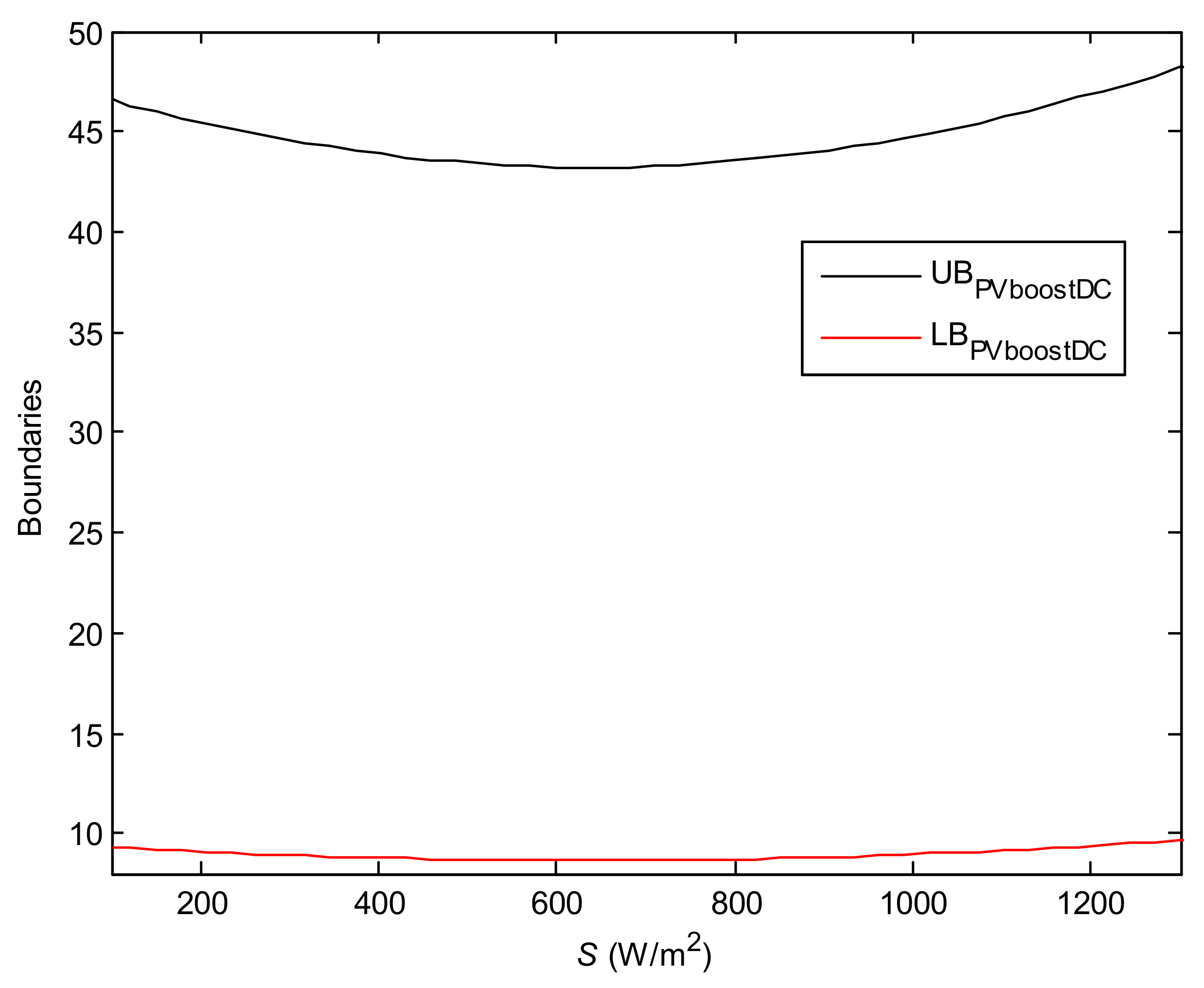
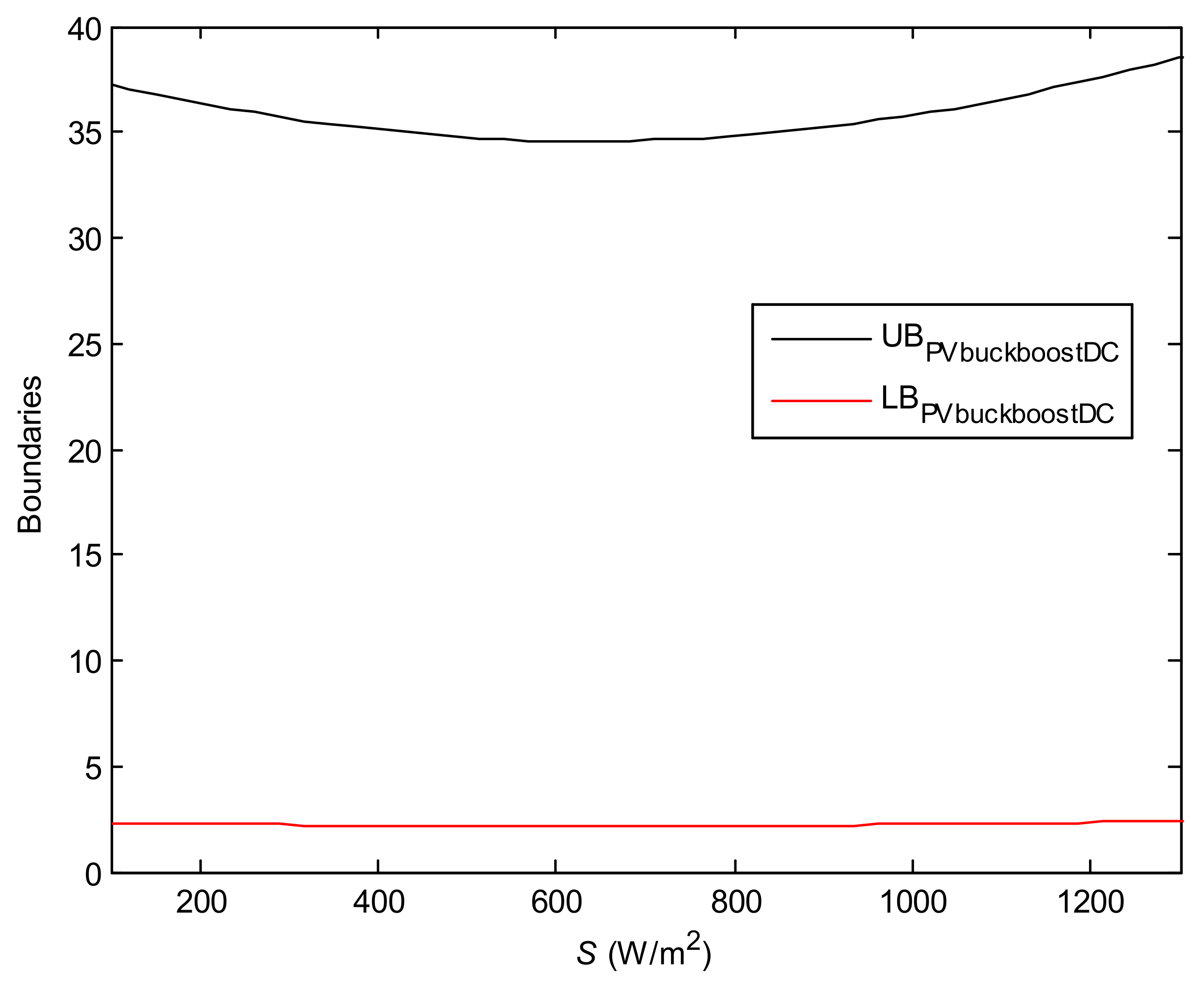
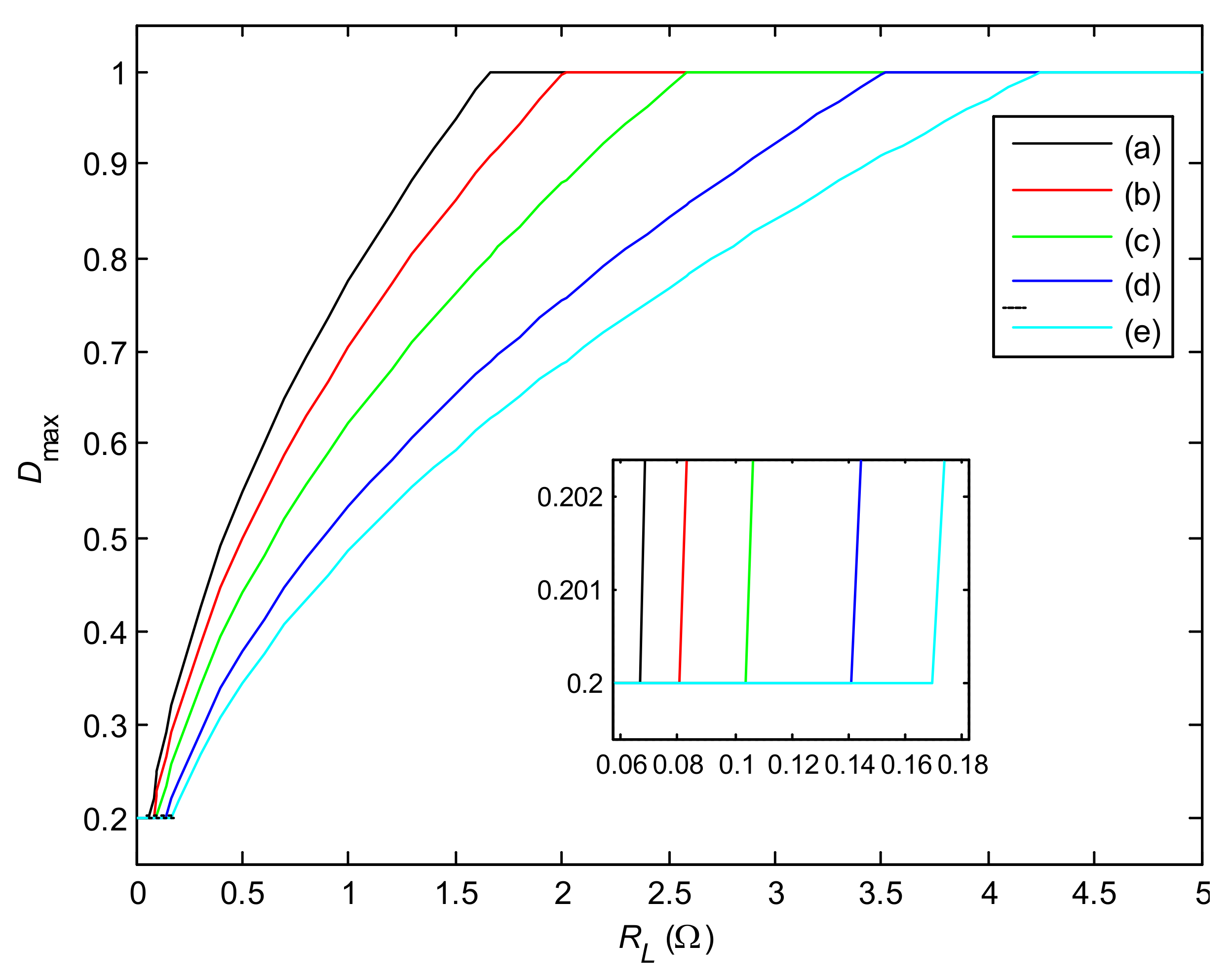
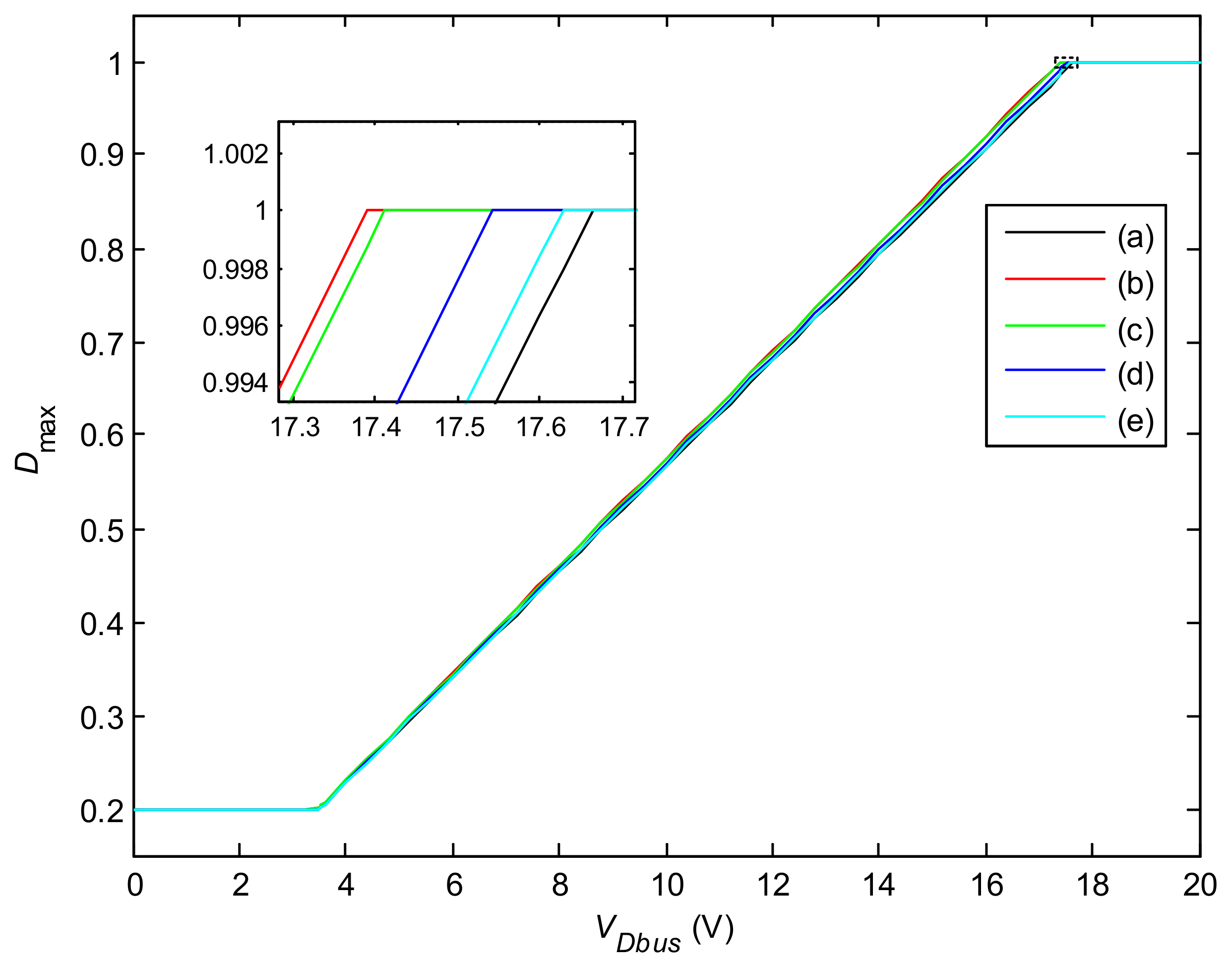
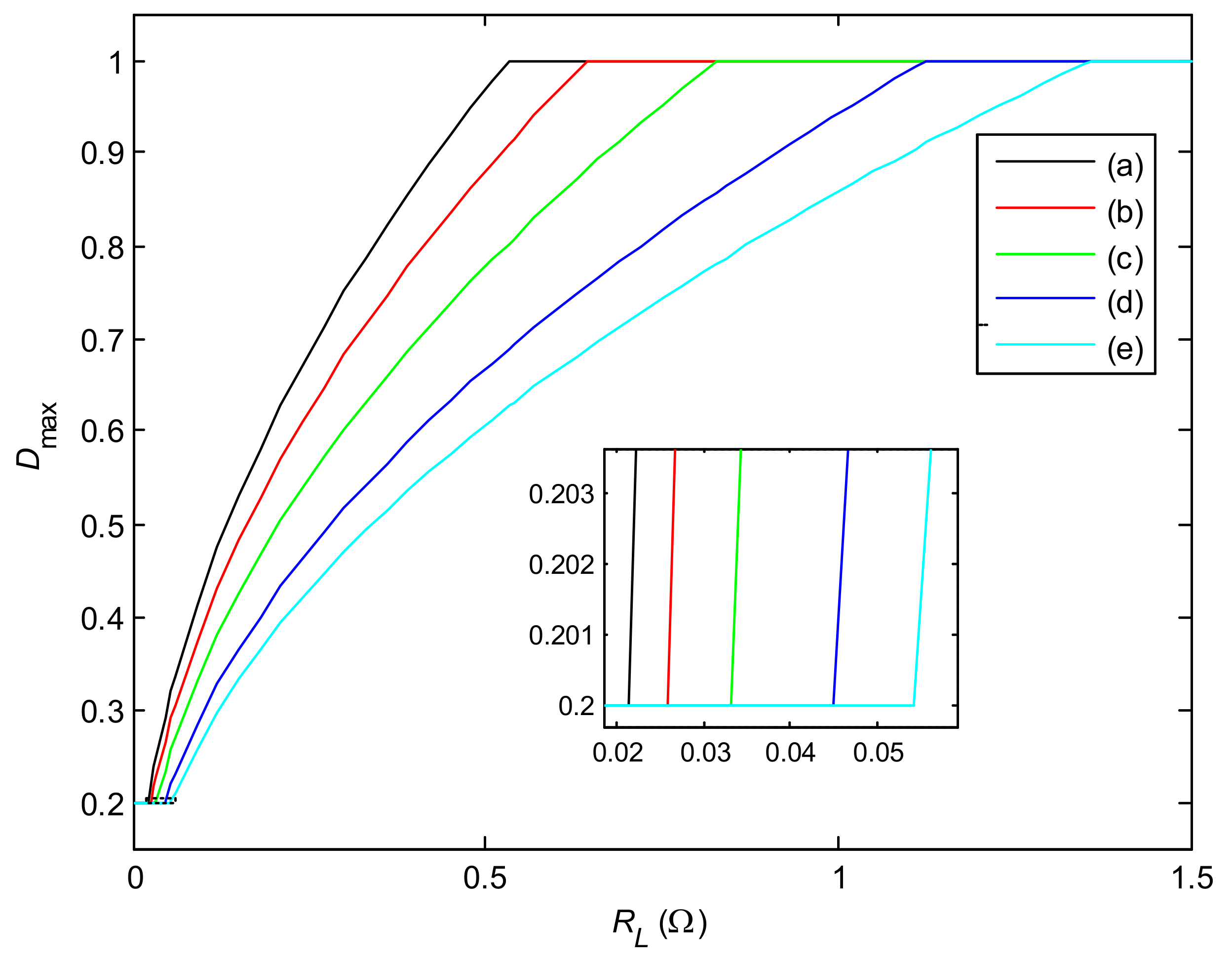
According to
Table 10, the voltage levels of
considered for the results in
Figure 11,
Figure 12 and
Figure 13 are less than 12.3 V, 61.5 V, and 49.5 V, respectively. Although these results have been presented at a lower voltage level, other levels can be easily analyzed by analogy. Therefore, the verification of the results shown in
Table 2 is not influenced by the voltage level of
.
6. Conclusions
In this paper, for PV systems with three different outputs, the expressions of their CPR have been proposed under ideal conditions and in practical application, respectively. Meanwhile, the characteristics of the CPR have been analyzed under varying weather and different system configuration conditions. Finally, some simulation experiments verify the accuracy of the expressions of the CPR. Meanwhile, simulation results also show that not only are these CPR influenced by the varying and , but the use of the inverter or the different choice of the DC/DC converter may also lead to the change of the CPR. In this work, the difficult question concerning when the MPP-TCM can be used is thoroughly solved, which plays an important role in studying the overall linearization of PV systems.
Future work on the subject will be focused on the use of the CPR to propose the overall linear model of PV system. To realize this purpose, on the one hand, these results on the CPR will be considered as one of the bridges to connect the inputs with outputs. On the other hand, some main factors in practical application should be taken in account. For example, how the CPR is influenced by the transmission efficiency should be analyzed.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}