
Algorithm for Implementation of Optimal Vector Combinations in Model Predictive Current Control of Six-Phase Induction Machines

 ,
,  , ,
, ,  ,
,  and
and 
Abstract
:1. Introduction
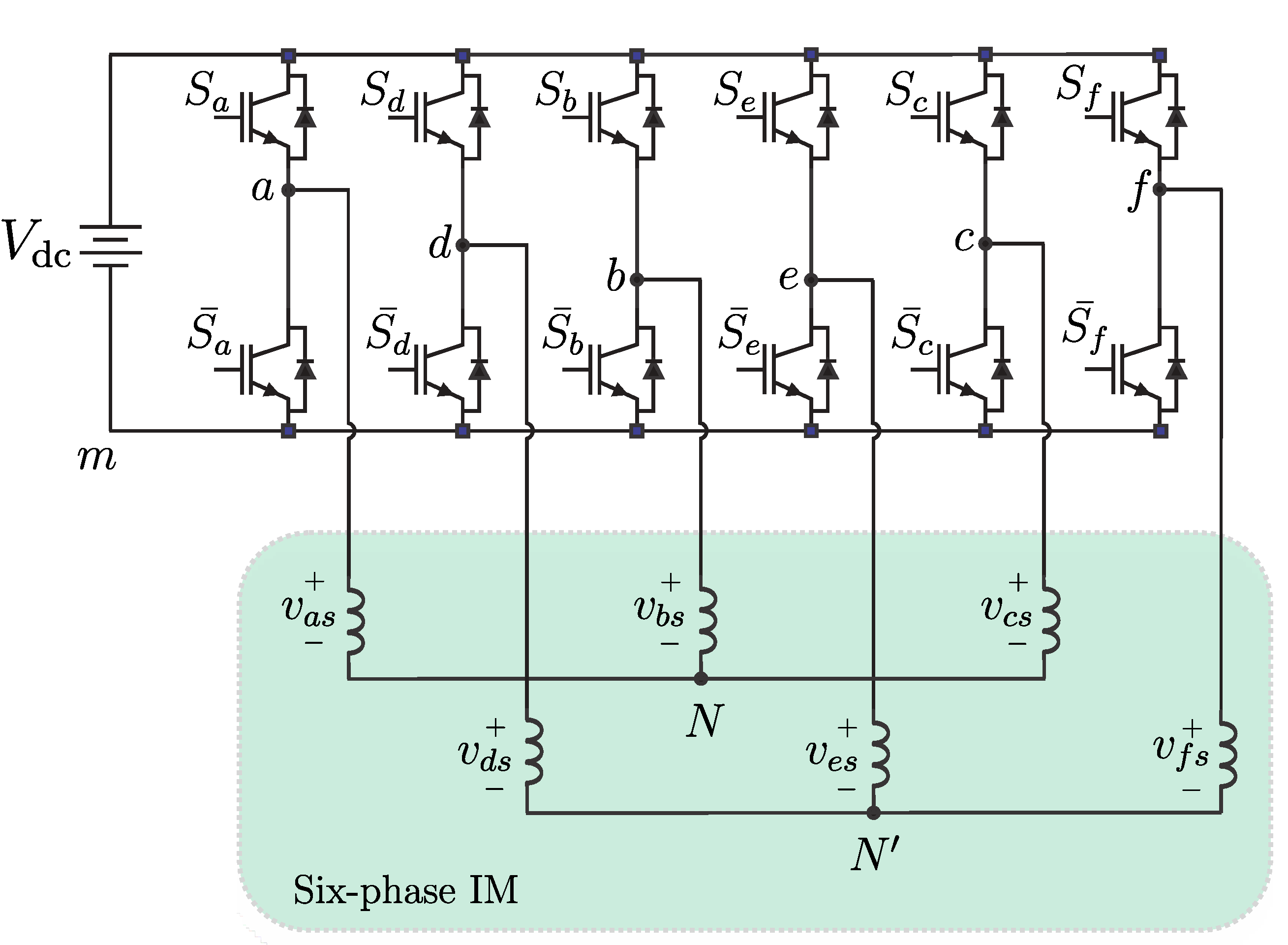
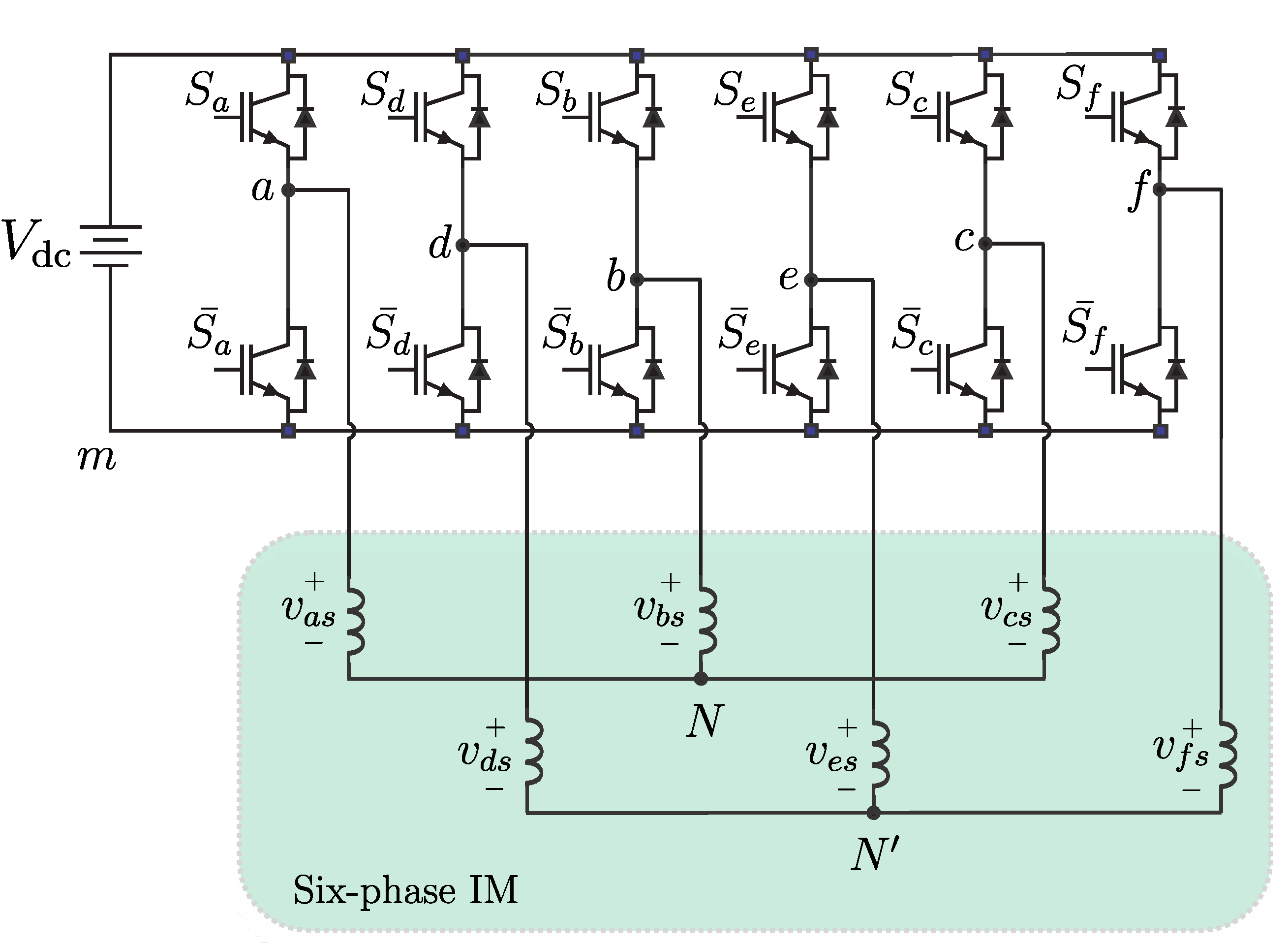
2. Six-Phase IM Mathematical Model
3. Classic MPC
3.1. Reduced Order Observer
3.2. Cost Function
4. Proposed Algorithm
4.1. Case 1: VV4
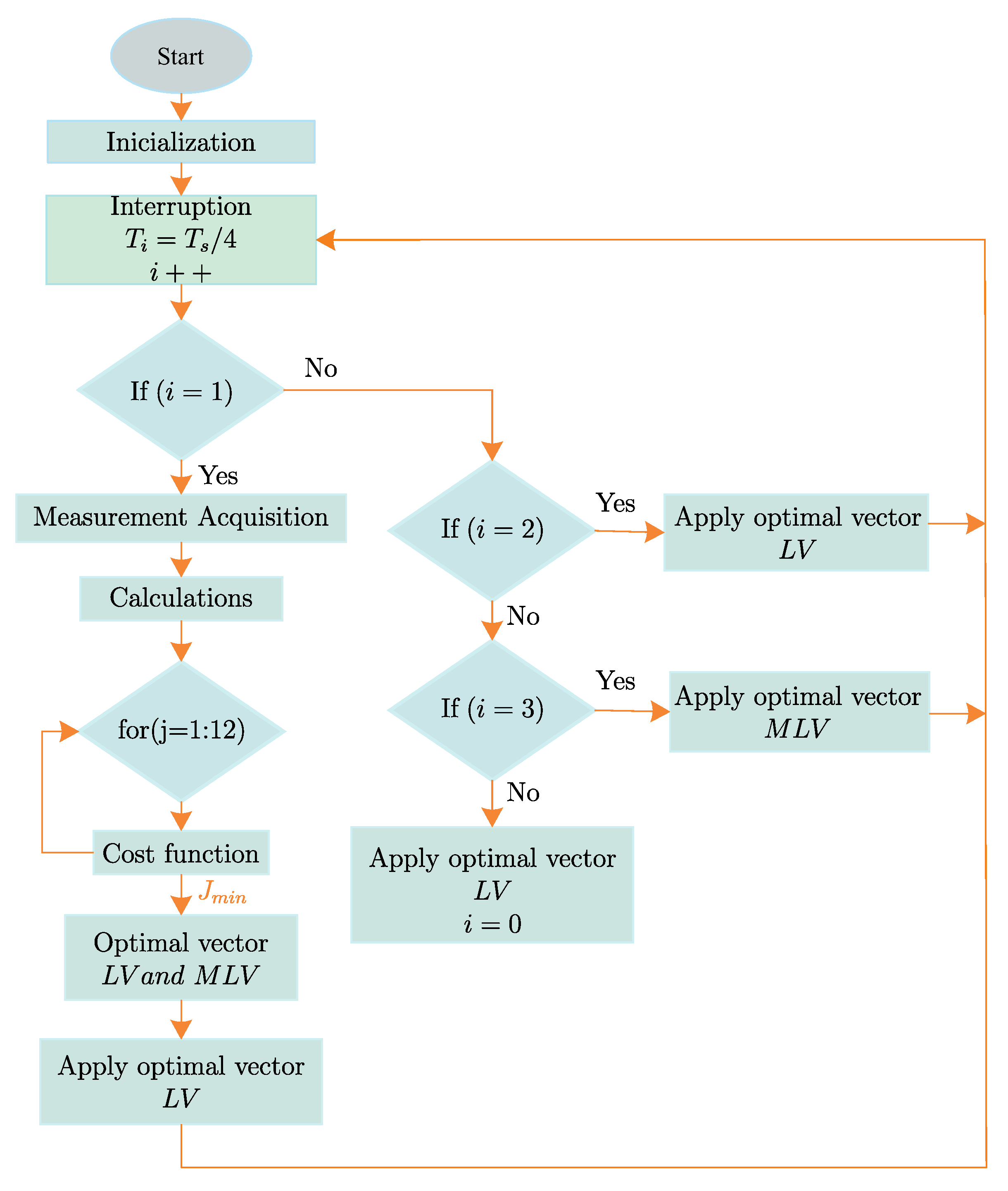
- Step 1: The algorithm starts with the variables initialization and calculation of the electrical parameters of IM.
- Step 2: The basic control technique, in this case the classical MPC, acquires measurements of the stator currents every sampling time (). To implement the VV4 technique, the original sampling time () is increased by 4, hereafter referred to as (), consequently the sampling frequency is reduced by 4. On the other hand, an interrupt is used to control current readings, calculations and transforms, vector selection and application. The input period to the routines contained in this interrupt is every /4, and they are called interrupt time (), so the interrupt is entered four times per sampling time.
- Step 3: In the first interval () of the sampling time (), the measurements are considered to proceed to perform the transformations and calculations.
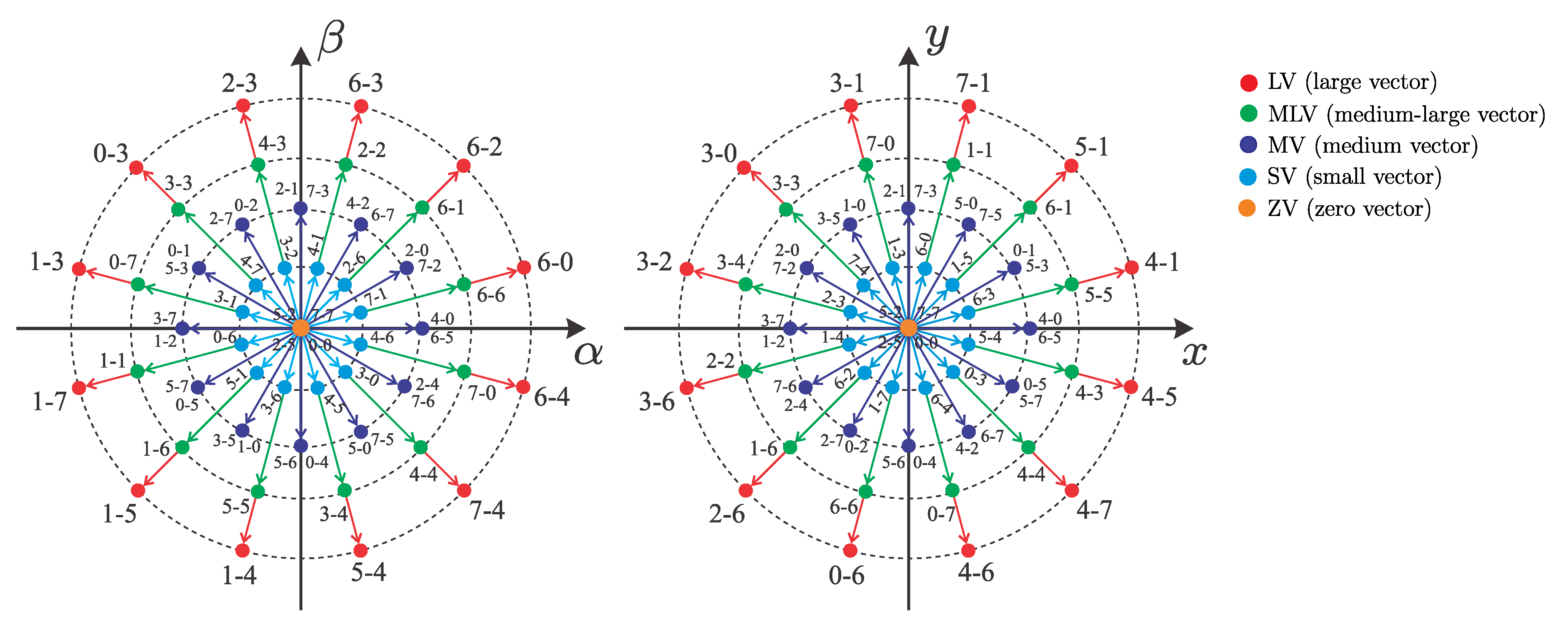
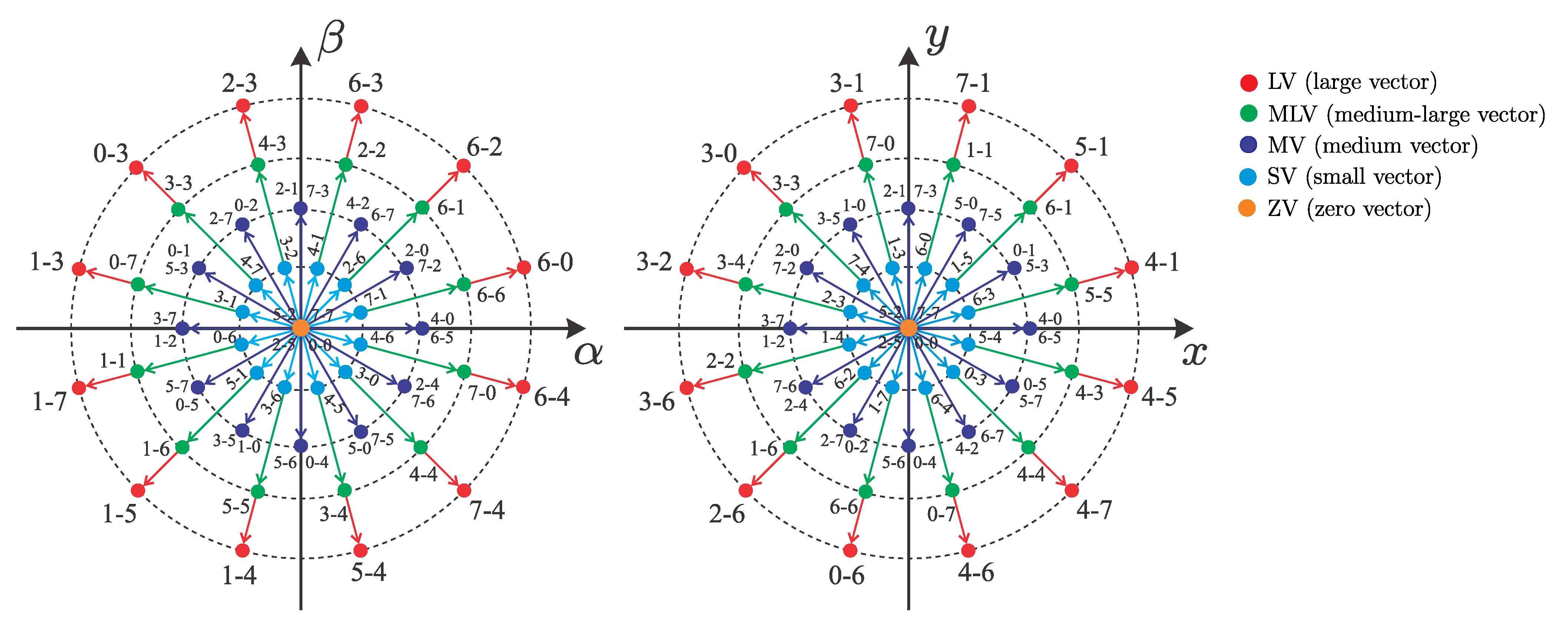
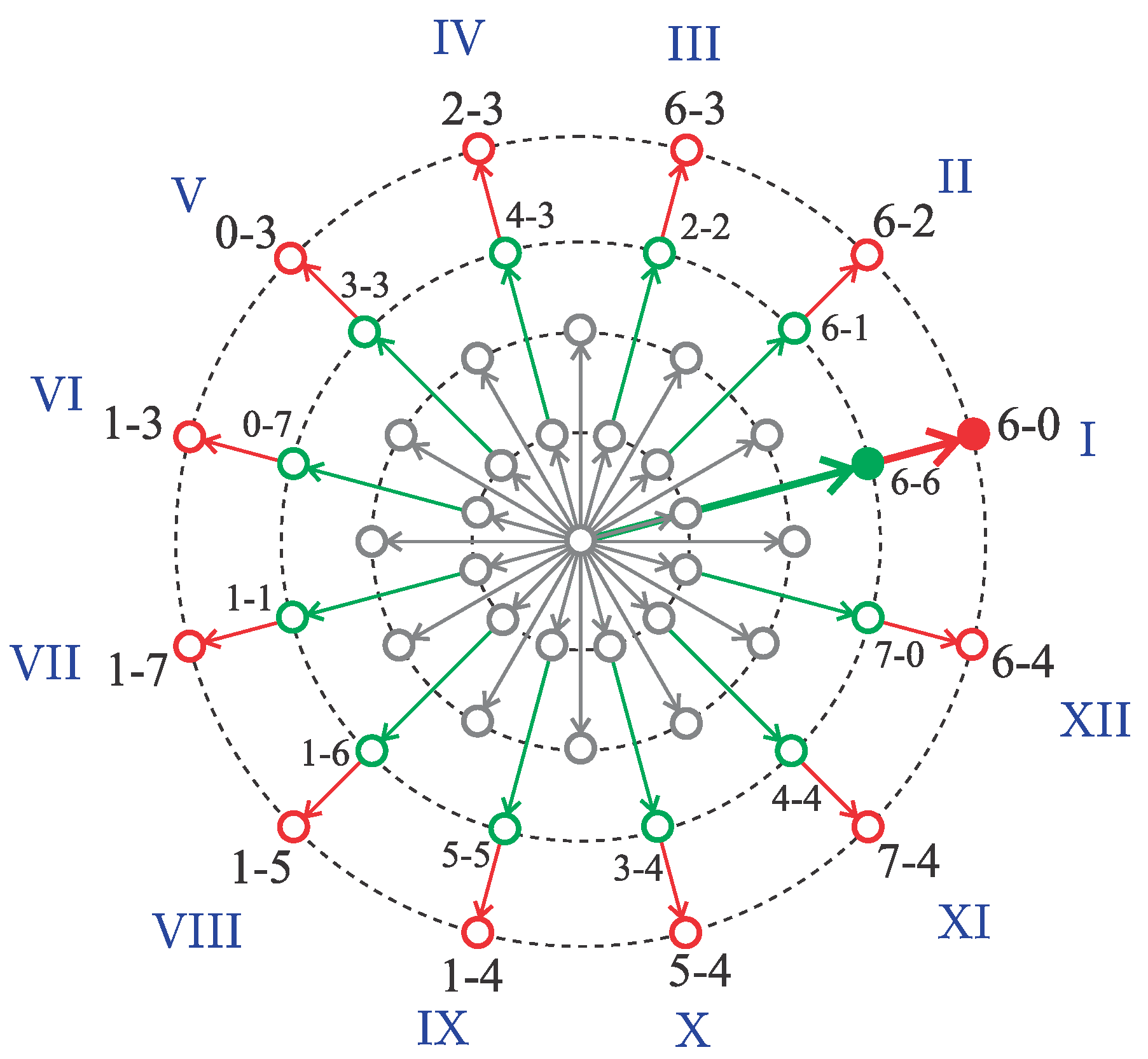
- Step 4: The 12 external vectors (LV) are evaluated using a cost function and the optimal vector is obtained. The MLV vector corresponding to the optimal LV is identified, and both will be applied during the sampling time.
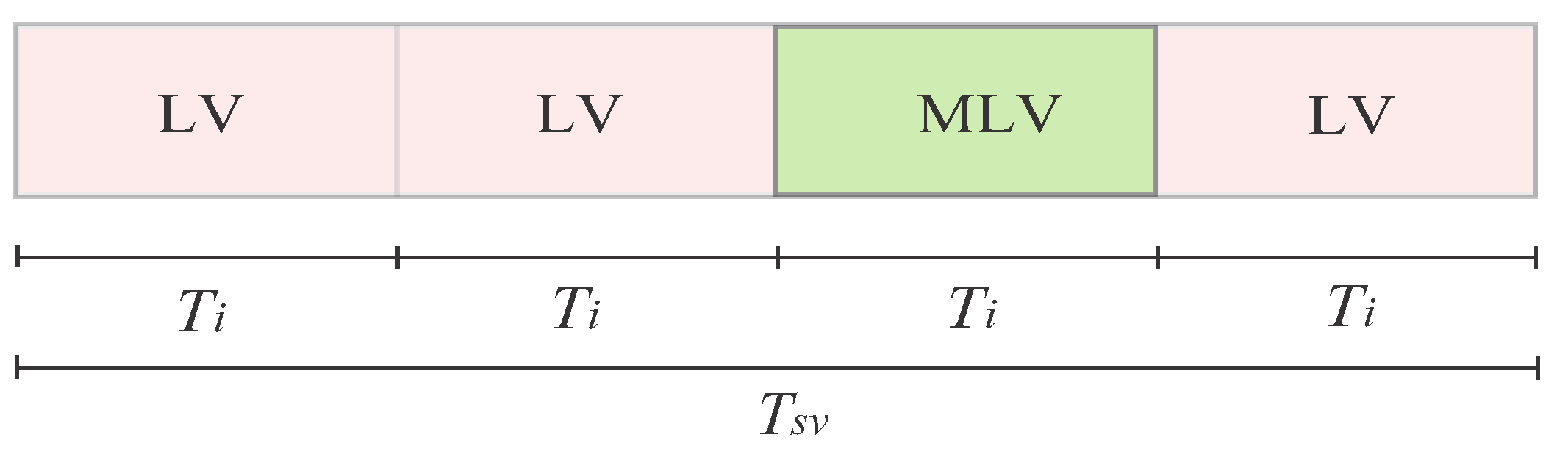
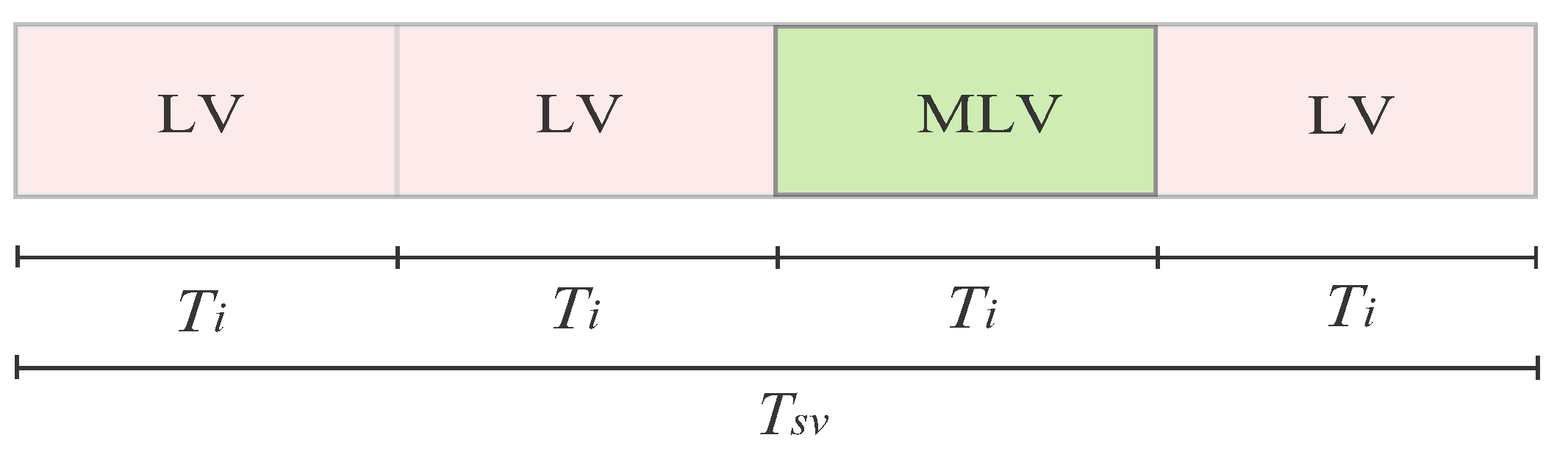
- Step 5: Only one vector is applied at each interrupt time, making use of conditional statements and a counter to identify the four interrupts in a sampling period. To reduce the losses in the x–y plane, the total application time of the active vectors is distributed between the LV and the MLV in a proportion of and respectively, so that the LV is applied three times and the MLV once. The final pattern of applied vectors is shown in Figure 5.
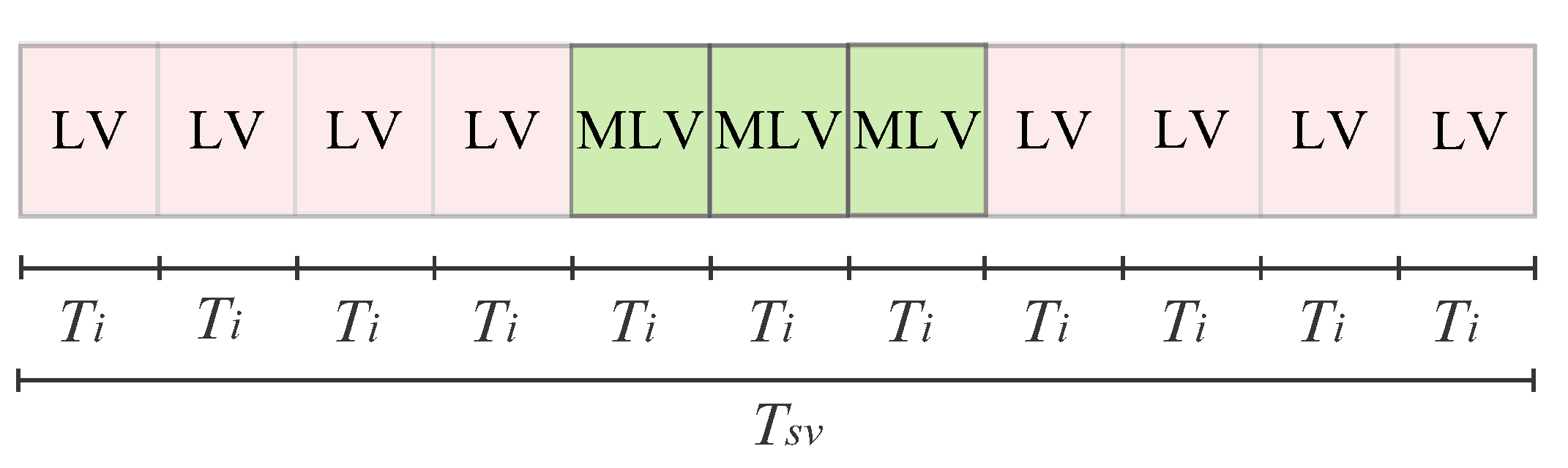
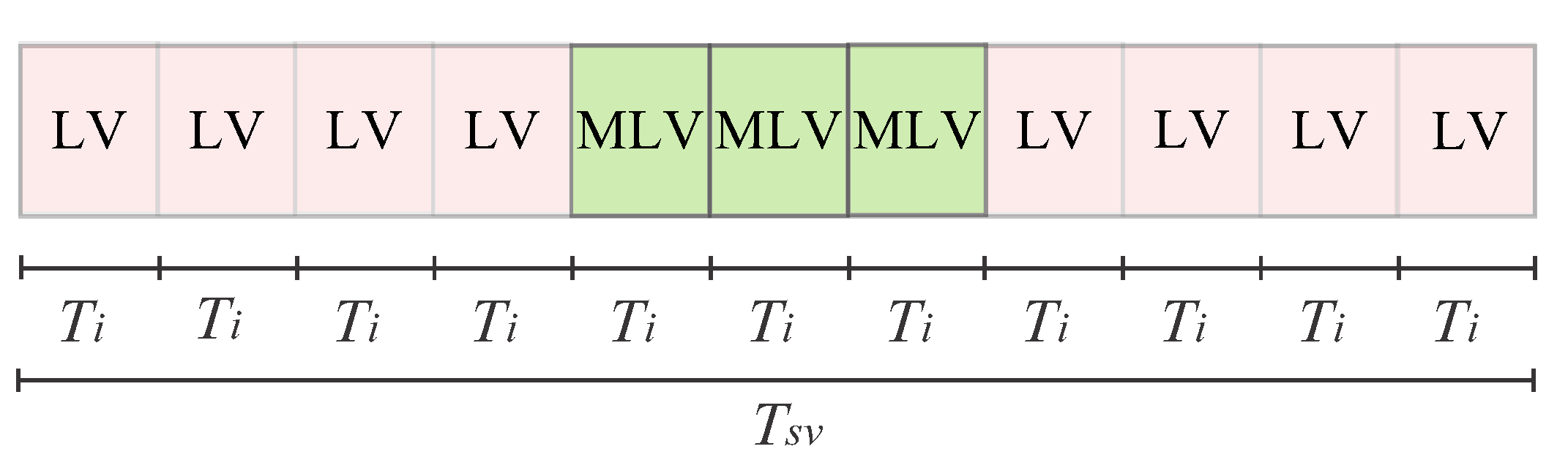
4.2. Case 2: VV11
5. Experimental Results
5.1. Six-Phase IM Test Bench Description
5.2. Figures of Merit
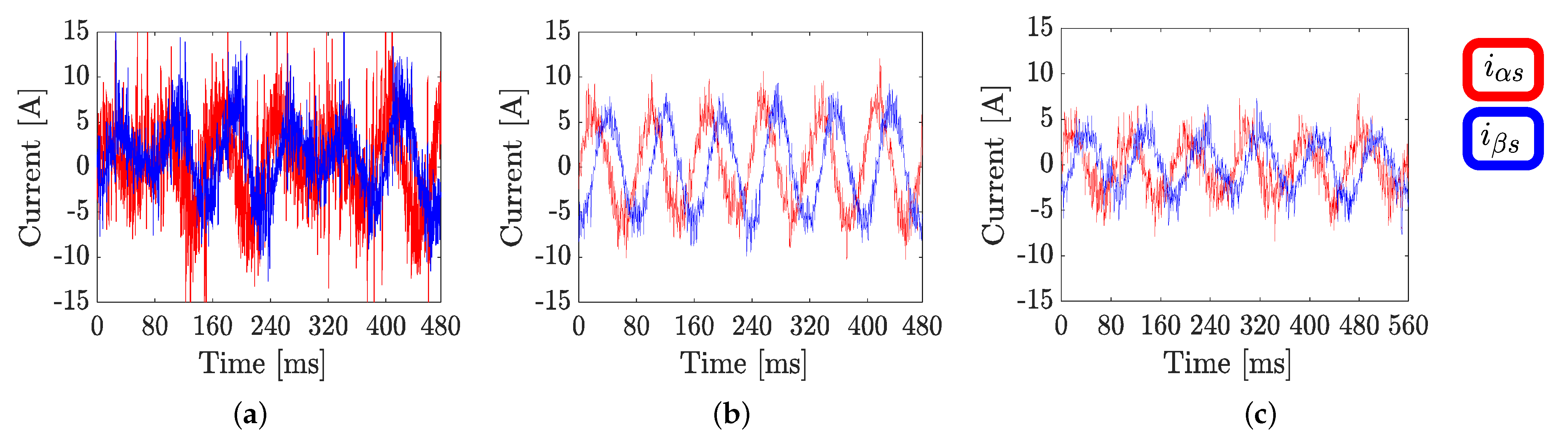
5.3. Steady-State Study
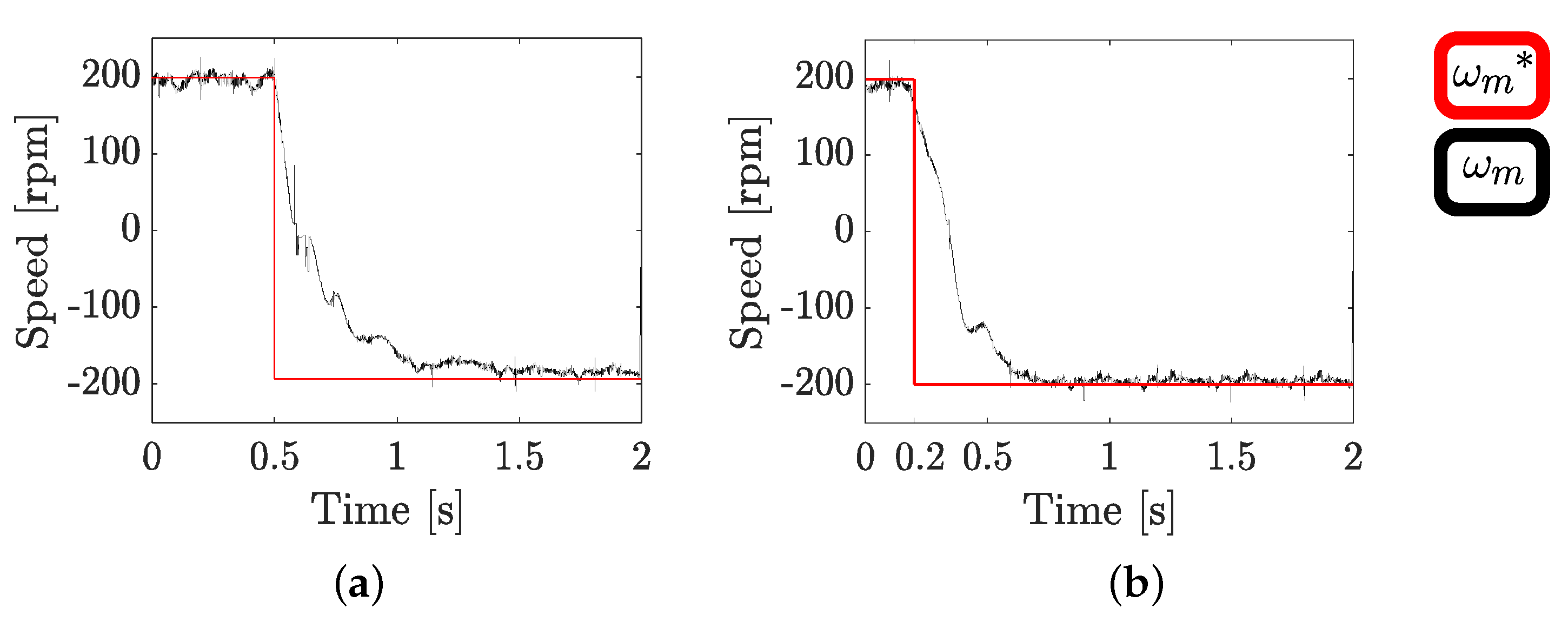
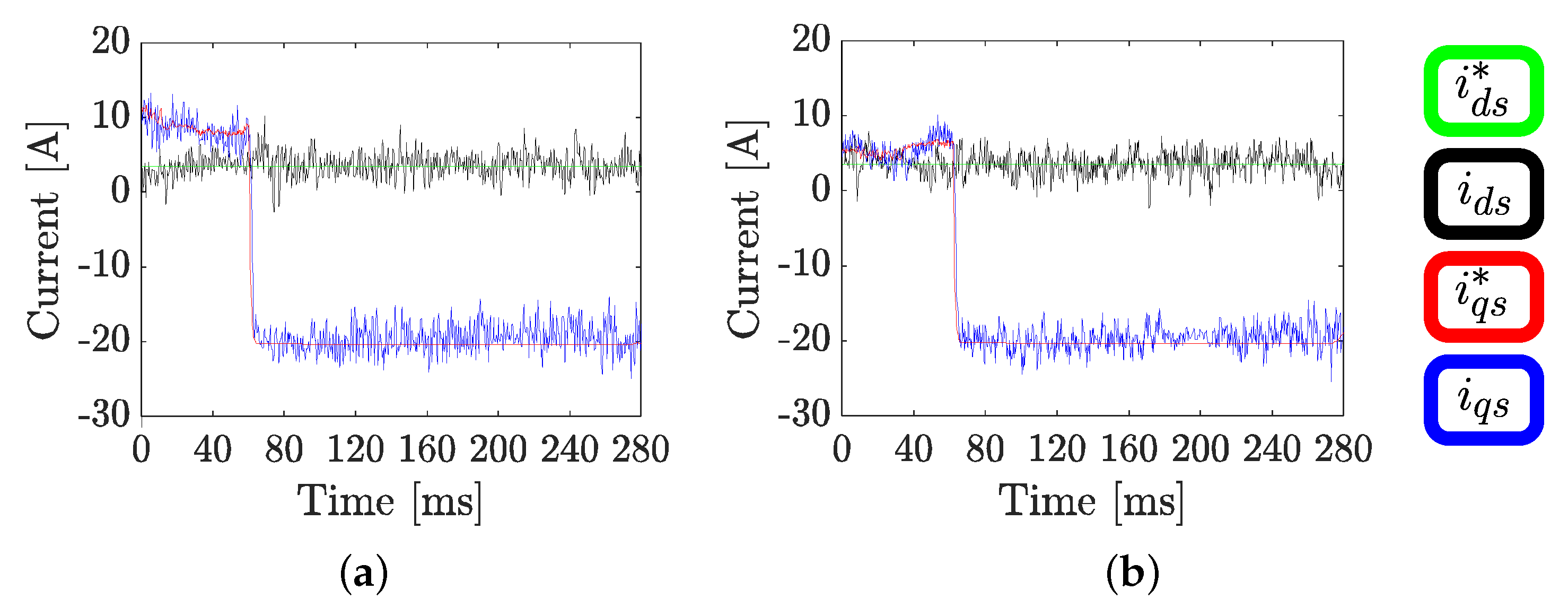
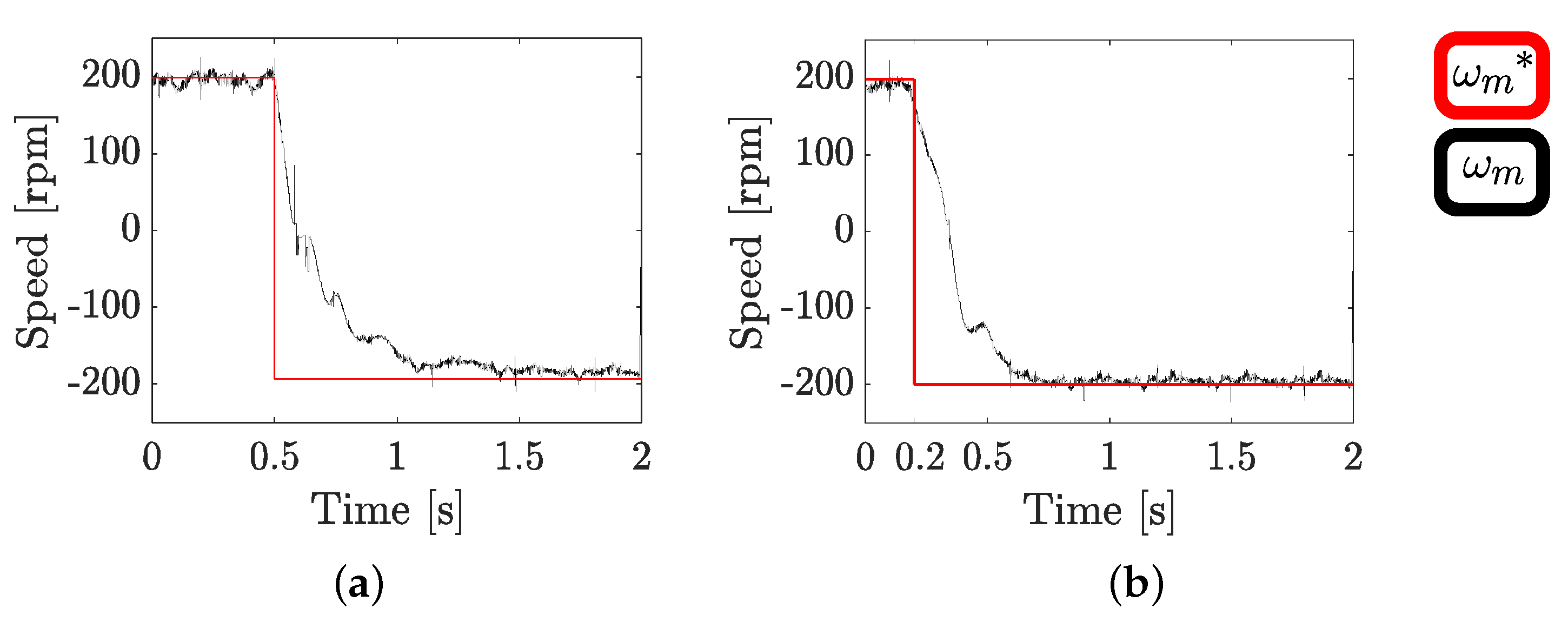
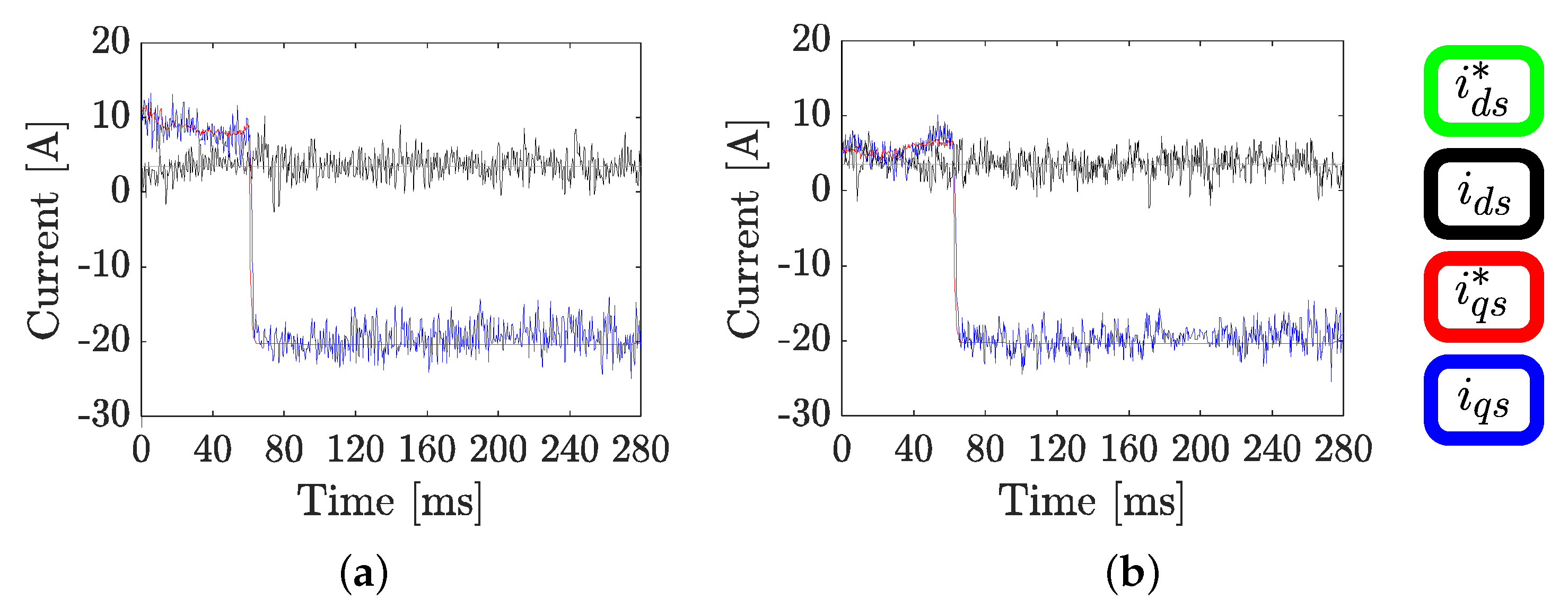
5.4. Transient Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DSP | Digital Signal Processor |
| IGBT | Isolated Gate Bipolar Transistors |
| IM | Induction Machine |
| VSI | Voltage Source Inverter |
| PI | Proportional-Integral |
| FOC | Field Oriented Control |
| MPC | Model Predictive Control |
| PCC | Predictive Current Control |
| PFSCCS | Predictive-Fixed Switching Current Control Strategy |
| LV | Large Vector |
| MLV | Medium Large Vector |
| MV | Medium Vector |
| SV | Small Vector |
| SVM | Space Vector Modulation |
| VSD | Vector Space Decomposition |
| VV | Virtual Vector |
| VV4 | Virtual Vectors with 4 application times |
| VV11 | Virtual Vectors with 11 application times |
| ZV | Zero Vector |
| LO | Luenberger Observer |
| KF | Kalman Filter |
| MSE | Mean Squared Error |
| THD | Total Harmonic Distortion |
Appendix A
References
- Levi, E.; Bojoi, R.; Profumo, F.; Toliyat, H.; Williamson, S. Multiphase induction motor drives—A technology status review. IET Electr. Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef] [Green Version]
- Barrero, F.; Duran, M.J. Recent advances in the design, modeling, and control of multiphase machines—Part I. IEEE Trans. Ind. Electron. 2015, 63, 449–458. [Google Scholar] [CrossRef]
- Duran, M.J.; Barrero, F. Recent advances in the design, modeling, and control of multiphase machines—Part II. IEEE Trans. Ind. Electron. 2015, 63, 459–468. [Google Scholar] [CrossRef]
- Bermudez, M.; Gonzalez, I.; Barrero, F.; Guzman, H.; Kestelyn, X.; Duran, M.J. An experimental assessment of open-phase fault-tolerant virtual-vector-based direct torque control in five-phase induction motor drives. IEEE Trans. Power Electron. 2018, 33, 2774–2784. [Google Scholar] [CrossRef] [Green Version]
- Kali, Y.; Ayala, M.; Rodas, J.; Saad, M.; Doval-Gandoy, J.; Gregor, R.; Benjelloun, K. Current control of a six-phase induction machine drive based on discrete-time sliding mode with time delay estimation. Energies 2019, 12, 170. [Google Scholar] [CrossRef] [Green Version]
- Kali, Y.; Ayala, M.; Rodas, J.; Saad, M.; Doval-Gandoy, J.; Gregor, R.; Benjelloun, K. Time Delay Estimation based Discrete-Time Super-Twisting Current Control for a Six-Phase Induction Motor. IEEE Trans. Power Electron. 2020. [Google Scholar] [CrossRef]
- Lim, C.S.; Levi, E.; Jones, M.; Rahim, N.A.; Hew, W.P. A comparative study of synchronous current control schemes based on FCS-MPC and PI-PWM for a two-motor three-phase drive. IEEE Trans. Ind. Electron. 2013, 61, 3867–3878. [Google Scholar] [CrossRef] [Green Version]
- Lim, C.S.; Levi, E.; Jones, M.; Rahim, N.A.; Hew, W.P. FCS-MPC-based current control of a five-phase induction motor and its comparison with PI-PWM control. IEEE Tran. Ind. Electron. 2013, 61, 149–163. [Google Scholar] [CrossRef]
- Levi, E.; Barrero, F.; Duran, M.J. Multiphase machines and drives-Revisited. IEEE Trans. Ind. Electron. 2015, 63, 429–432. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, P.; Cruz, S.; Mendes, A. Finite control set model predictive control of six-phase asymmetrical machines—An overview. Energies 2019, 12, 4693. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Estévez, D.; Doval-Gandoy, J. A Model Predictive Current Controller With Improved Robustness Against Measurement Noise and Plant Model Variations. IEEE Open J. Ind. Appl. 2021, 2, 131–142. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Aciego, J.J.; Martin, C.; Barrero, F. Model predictive control of six-phase induction motor drives using virtual voltage vectors. IEEE Trans. Ind. Electron. 2017, 65, 27–37. [Google Scholar] [CrossRef]
- Aciego, J.J.; Prieto, I.G.; Duran, M.J. Model predictive control of six-phase induction motor drives using two virtual voltage vectors. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 7, 321–330. [Google Scholar] [CrossRef]
- Aciego, J.J.; Gonzalez-Prieto, I.; Duran, M.J.; Bermudez, M.; Salas-Biedma, P. Model predictive control based on dynamic voltage vectors for six-phase induction machines. IEEE J. Emerg. Sel. Top. Power Electron. 2020. [Google Scholar] [CrossRef]
- González, O.; Ayala, M.; Romero, C.; Rodas, J.; Gregor, R.; Delorme, L.; González-Prieto, I.; Durán, M.J.; Rivera, M. Comparative Assessment of Model Predictive Current Control Strategies applied to Six-Phase Induction Machines. In Proceedings of the 2020 IEEE International Conference on Industrial Technology (ICIT), Buenos Aires, Argentina, 26–28 February 2020; pp. 1037–1043. [Google Scholar]
- Durán, M.J.; Gonzalez-Prieto, I.; Gonzalez-Prieto, A. Large virtual voltage vectors for direct controllers in six-phase electric drives. Int. J. Electr. Power Energy Syst. 2021, 125, 106425. [Google Scholar] [CrossRef]
- Gonzalez, O.; Ayala, M.; Doval-Gandoy, J.; Rodas, J.; Gregor, R.; Rivera, M. Predictive-Fixed Switching Current Control Strategy Applied to Six-Phase Induction Machine. Energies 2019, 12, 2294. [Google Scholar] [CrossRef] [Green Version]
- Ayala, M.; Doval-Gandoy, J.; Rodas, J.; Gonzalez, O.; Gregor, R.; Rivera, M. A Novel Modulated Model Predictive Control Applied to Six-Phase Induction Motor Drives. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Ayala, M.; Doval-Gandoy, J.; Gonzalez, O.; Rodas, J.; Gregor, R.; Rivera, M. Experimental Stability Study of Modulated Model Predictive Current Controllers Applied to Six-Phase Induction Motor Drives. IEEE Trans. Power Electron 2021, 1. [Google Scholar] [CrossRef]
- Martin, C.; Arahal, M.R.; Barrero, F.; Durán, M.J. Five-phase induction motor rotor current observer for finite control set model predictive control of stator current. IEEE Trans. Ind. Electron. 2016, 63, 4527–4538. [Google Scholar] [CrossRef]
- Martín, C.; Arahal, M.R.; Barrero, F.; Durán, M.J. Multiphase rotor current observers for current predictive control: A five-phase case study. Control Eng. Pract. 2016, 49, 101–111. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons: Hoboken, NJ, USA, 2012; Volume 40. [Google Scholar]
- Yepes, A.G.; Riveros, J.A.; Doval-Gandoy, J.; Barrero, F.; López, O.; Bogado, B.; Jones, M.; Levi, E. Parameter identification of multiphase induction machines with distributed windings Part 1: Sinusoidal excitation methods. IEEE Trans. Energy Conv. 2012, 27, 1056–1066. [Google Scholar] [CrossRef]
- Riveros, J.A.; Yepes, A.G.; Barrero, F.; Doval-Gandoy, J.; Bogado, B.; Lopez, O.; Jones, M.; Levi, E. Parameter identification of multiphase induction machines with distributed windings Part 2: Time-domain techniques. IEEE Trans. Energy Conv. 2012, 27, 1067–1077. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.63 | 206.2 mH | ||
| 0.62 | P | 3 | |
| 6.4 mH | 15 kW | ||
| 3.5 mH | 0.27 kg·m | ||
| 66.6 mH | 0.012 kg·m/s | ||
| 203.3 mH | 1000 rpm |
| VV4 at = 2.5 (kHz) | |||||
|---|---|---|---|---|---|
| MSE | MSE | MSE | MSE | THD | |
| 100 | 1.95 | 1.65 | 2.97 | 3.29 | 14.22 |
| 200 | 2.15 | 1.94 | 3.10 | 3.26 | 15.43 |
| 300 | 2.52 | 2.44 | 3.05 | 3.28 | 13.64 |
| 400 | 2.87 | 2.83 | 3.10 | 3.35 | 16.13 |
| 500 | 3.27 | 3.15 | 3.14 | 3.37 | 18.04 |
| 600 | 3.56 | 3.67 | 3.16 | 3.38 | 16.67 |
| VV11 at = 2.5 (kHz) | |||||
|---|---|---|---|---|---|
| MSE | MSE | MSE | MSE | THD | |
| 100 | 1.58 | 1.26 | 2.55 | 2.84 | 19.59 |
| 200 | 1.53 | 1.27 | 2.50 | 2.77 | 22.22 |
| 300 | 1.65 | 1.38 | 2.47 | 2.79 | 23.43 |
| 400 | 1.63 | 1.39 | 2.56 | 2.73 | 24.73 |
| 500 | 2.38 | 1.86 | 2.50 | 2.77 | 24.56 |
| 600 | 2.60 | 2.17 | 2.57 | 2.86 | 29.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Romero, C.; Delorme, L.; Gonzalez, O.; Ayala, M.; Rodas, J.; Gregor, R. Algorithm for Implementation of Optimal Vector Combinations in Model Predictive Current Control of Six-Phase Induction Machines. Energies 2021, 14, 3857. https://doi.org/10.3390/en14133857
Romero C, Delorme L, Gonzalez O, Ayala M, Rodas J, Gregor R. Algorithm for Implementation of Optimal Vector Combinations in Model Predictive Current Control of Six-Phase Induction Machines. Energies. 2021; 14(13):3857. https://doi.org/10.3390/en14133857
Chicago/Turabian StyleRomero, Carlos, Larizza Delorme, Osvaldo Gonzalez, Magno Ayala, Jorge Rodas, and Raul Gregor. 2021. "Algorithm for Implementation of Optimal Vector Combinations in Model Predictive Current Control of Six-Phase Induction Machines" Energies 14, no. 13: 3857. https://doi.org/10.3390/en14133857
APA StyleRomero, C., Delorme, L., Gonzalez, O., Ayala, M., Rodas, J., & Gregor, R. (2021). Algorithm for Implementation of Optimal Vector Combinations in Model Predictive Current Control of Six-Phase Induction Machines. Energies, 14(13), 3857. https://doi.org/10.3390/en14133857