4.1. Turbine Mode Transient Sequence
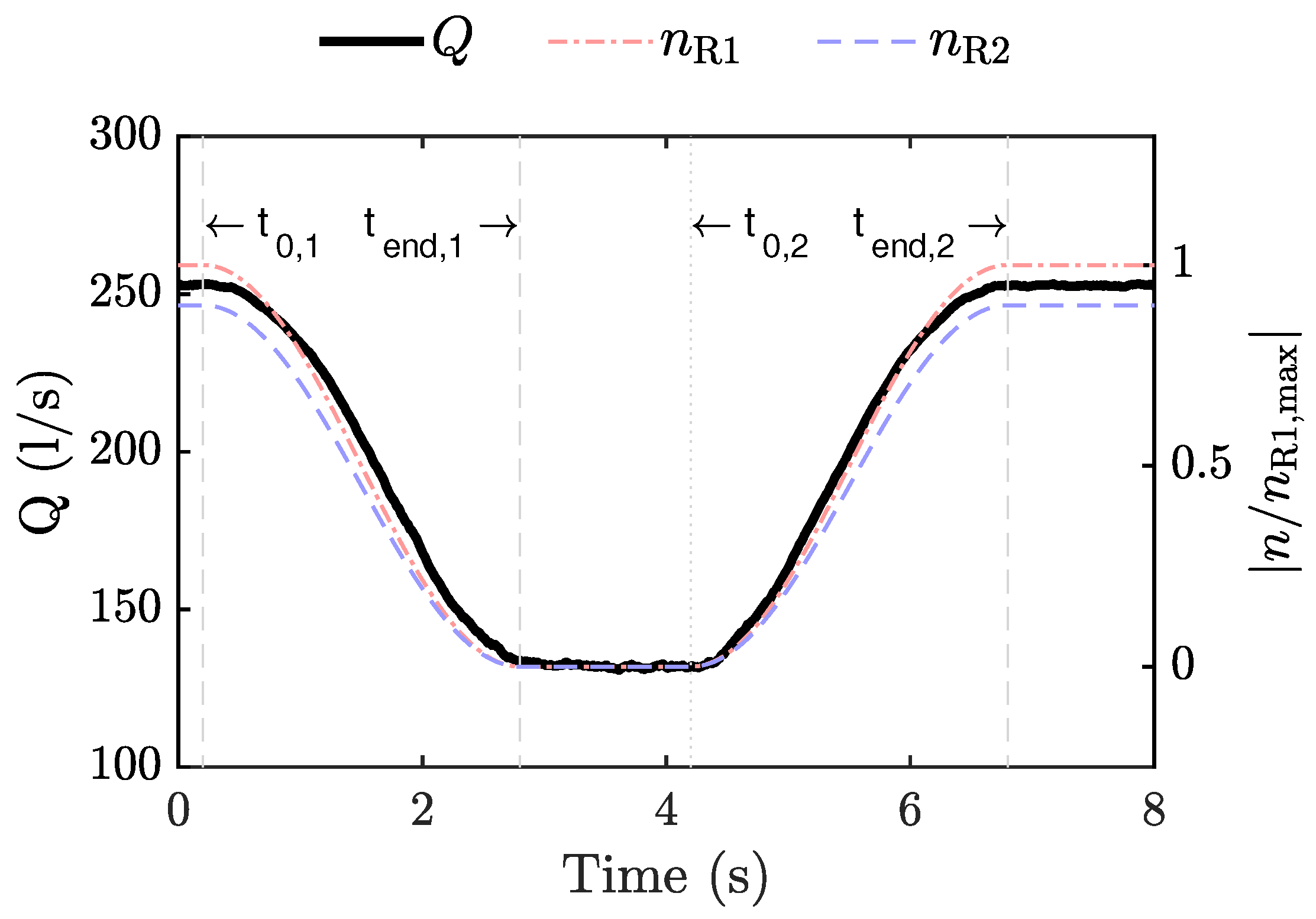
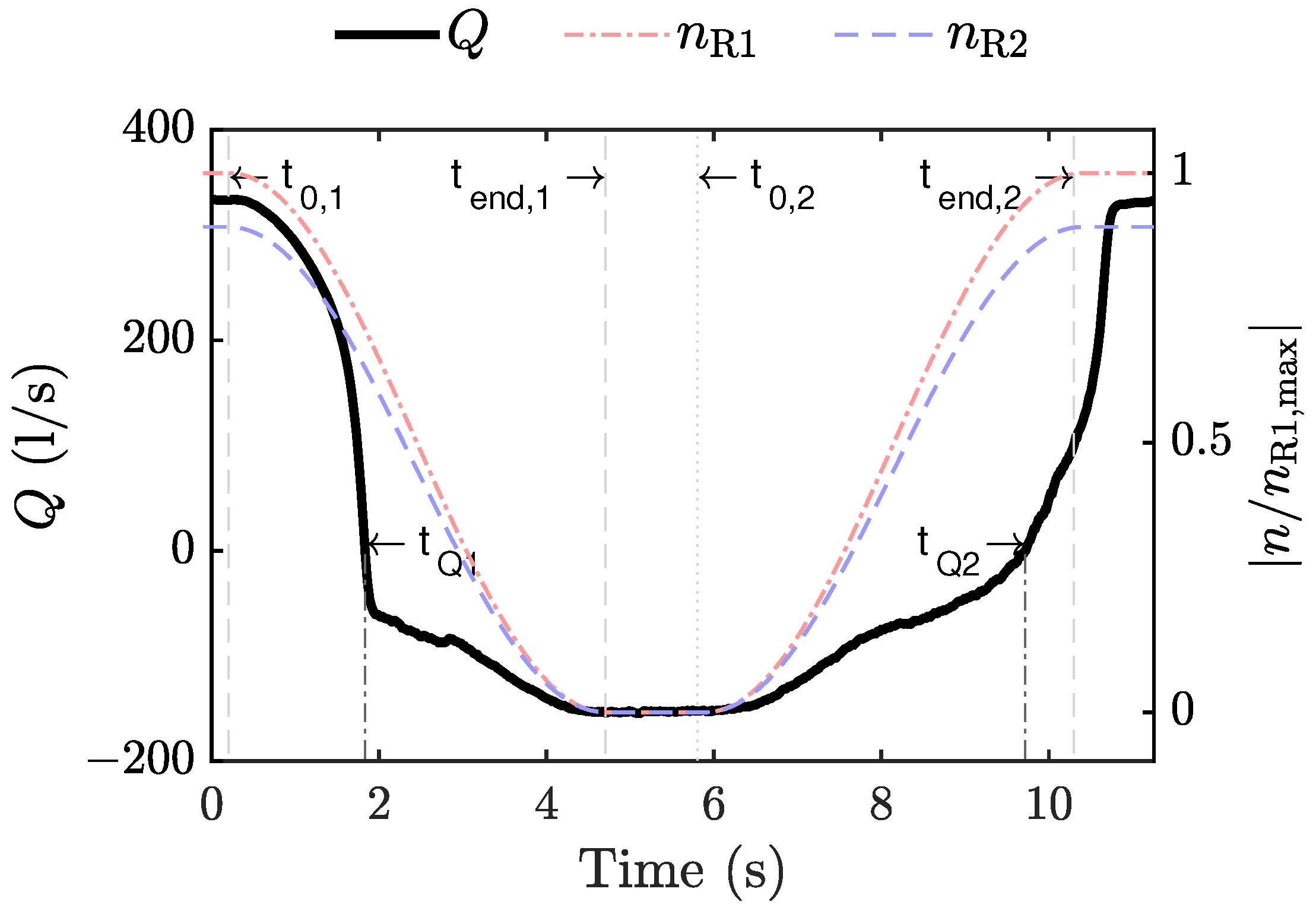
The shutdown and startup sequences in turbine mode are analysed here. The numerically predicted flow rate is shown in
Figure 4 as a function of time. The flow rate was initially 253 L/s, at the design point. The rotational speed of the runners started to decrease at
, and the flow rate followed the decreasing rotational speed. This was because with a lower rotational speed, the CRPT was not effectively extracting energy from the flow, and the losses that reduced the flow rate were increasing. As the runners were at a stand-still (
), the machine was simply a large obstacle in the flow path, and the flow rate was 132 L/s. This was almost half the flow rate of the design point. At
, the runner rotational speeds started to increase, and the flow rate increased accordingly. The change of flow rate occurred symmetrically in the turbine mode sequences with the change of the rotational speeds. This was not the case in pump mode, as discussed later.
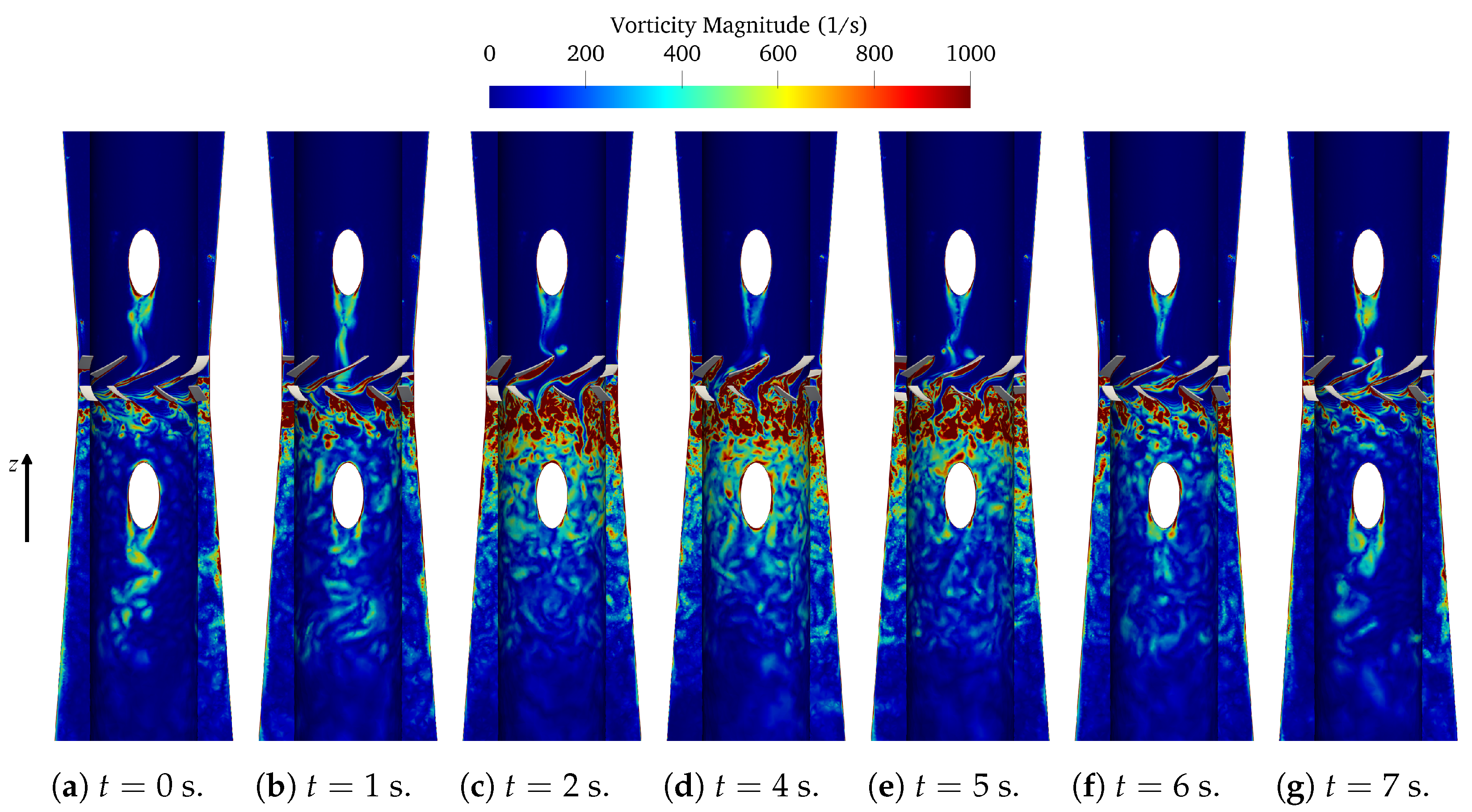
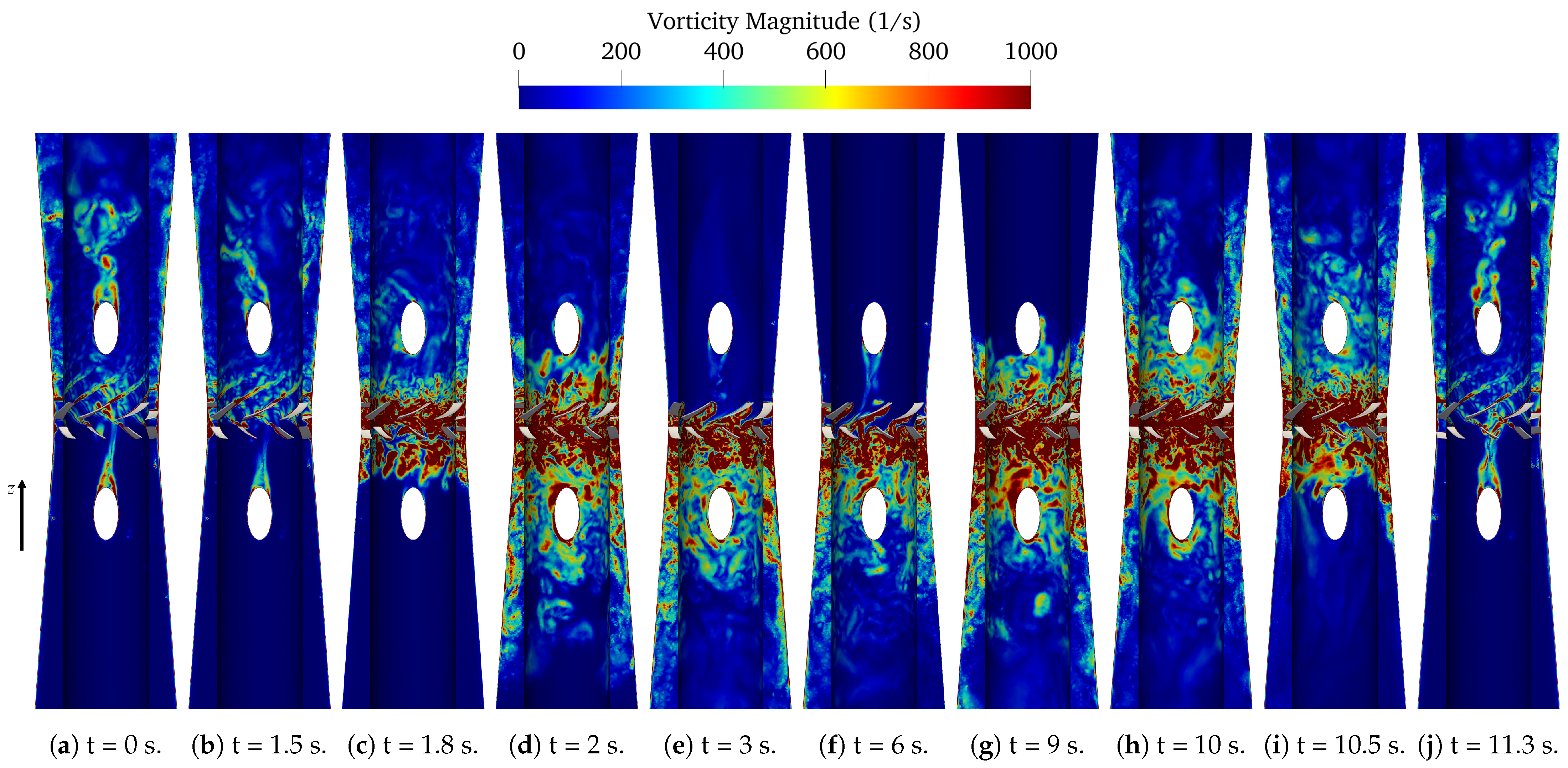
With a decreasing rotational speed, unfavourable flow structures increased in scale and number, and the flow became massively separated after the CRPT, as shown by the vorticity magnitude in
Figure 5. Note that the flow was from top to bottom, and that vorticity is defined as the curl of the velocity. At
s (
Figure 5a), the flow was rather axial, both before and after the runners, and the vortex shedding of the downstream support-strut was captured. As the rotational speeds decreased, it can be seen in
Figure 5a–d that the flow at the blades of Runner 1 (lower one) first started to separate, then the same happened also at Runner 2. The reduction in rotational speed of Runner 2 increased the swirl coming to Runner 1. At the same time, Runner 1 was also decreasing its rotational speed, which further deteriorated the relative flow angle at the leading edges of Runner 1’s blades. This is why the flow behind Runner 1 separated much more than that of Runner 2. This suggests that Runner 1 should maintain its rotational speed in the initial phase, but at some point, it must reduce its speed to stand-still and thus go through such unfavourable conditions. However, at that point, there would also be a valve that closed and further reduced the flow rate of the machine. Suggesting the optimum shutdown and startup sequences to minimise the damaging effects of the large flow separation structures remains to be investigated. At time
s, the runners were both at a stand-still, and a chaotic flow field had developed downstream the runners. This was mainly generated by a massive separation on Runner 1’s blades, although also, the separation on Runner 2’s blades increased significantly. As the rotational speed of the runners increased, the efficient tandem operation of the two runners became apparent again. This is shown by
Figure 5d–g, as the unfavourable flow structures diminished during the startup sequence. As for the flow rate variation, shown in
Figure 4, the variation in unfavourable flow structures (and thus losses) was very similar for the shutdown and startup sequences. However, the vortex shedding behind the downstream support-strut needed some additional time to develop after
s.
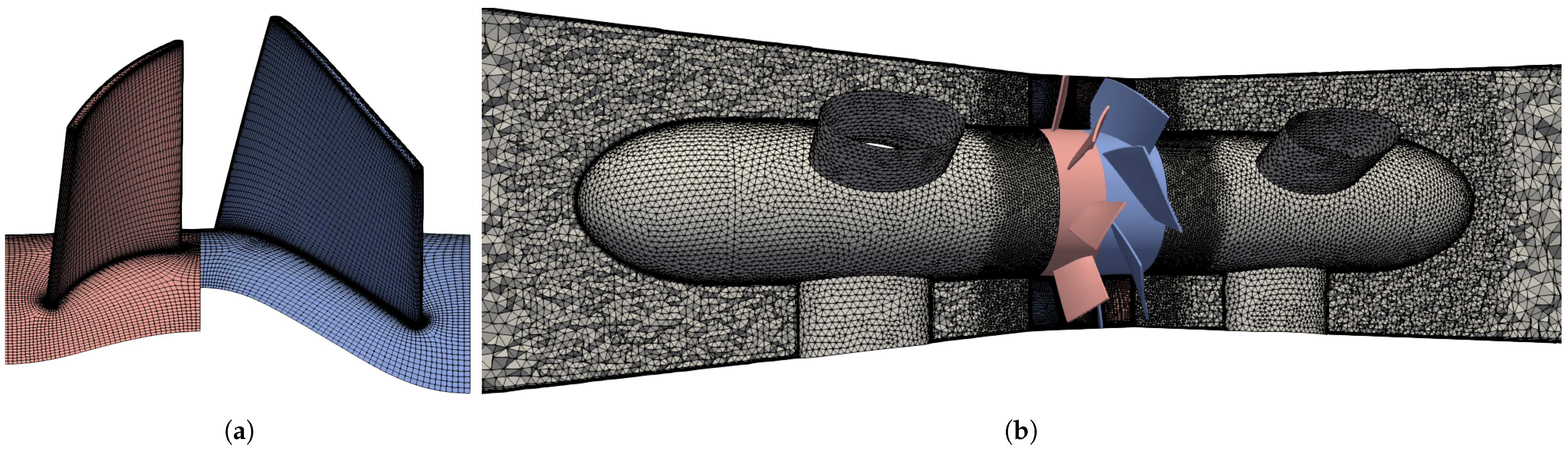
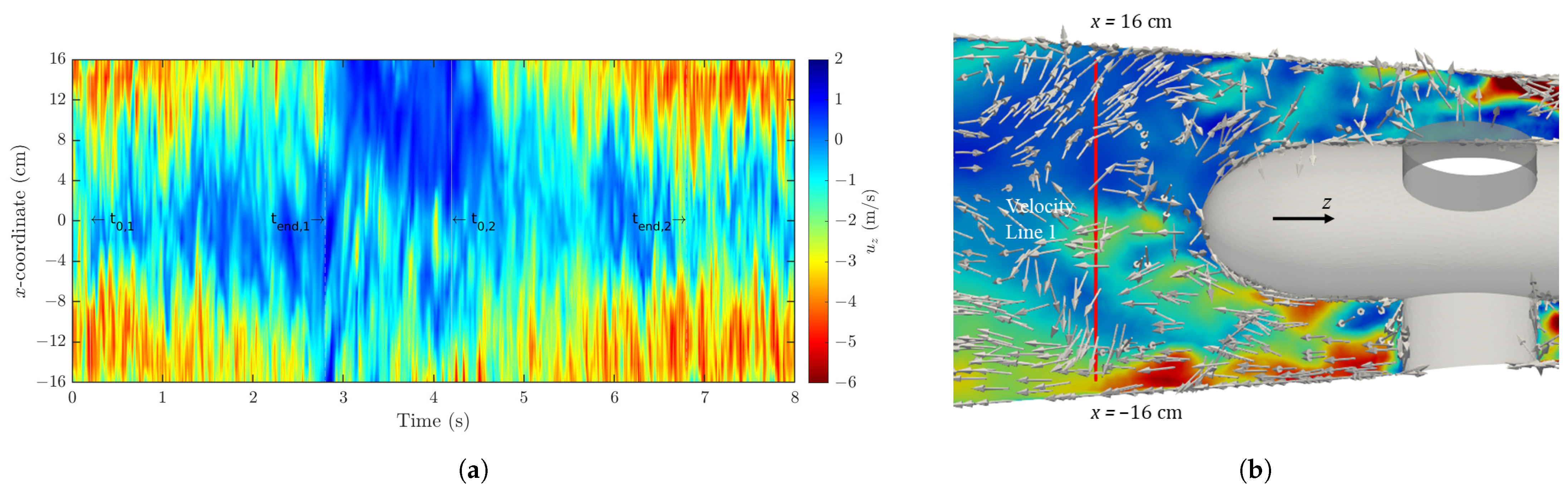
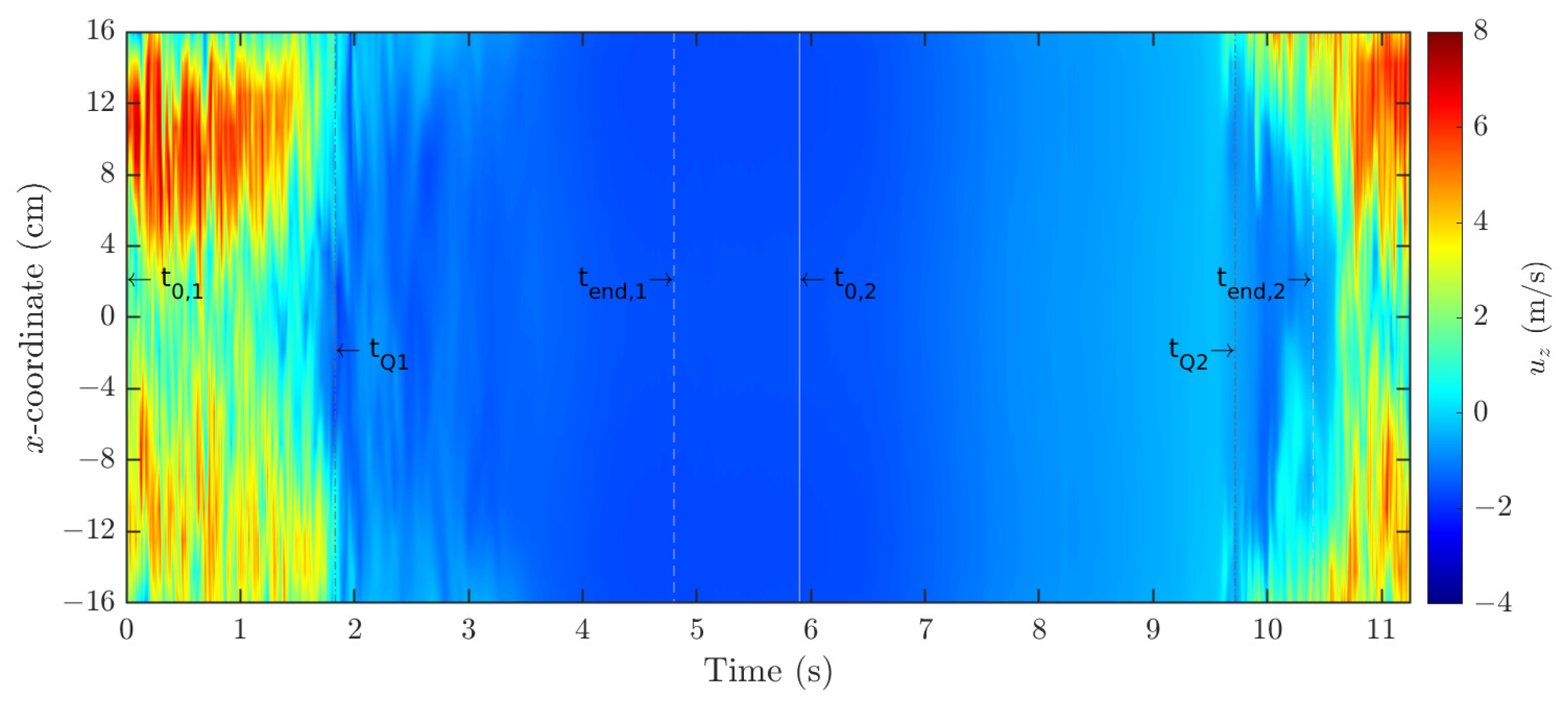
The axial velocity at probing Line 1 (see the location in
Figure 1b) is shown in
Figure 6a as a contour over the
x-coordinate and time. The flow profile was rather similar over the centreline at the earlier and later time steps, where the machine was working at the design point condition. There was not a distinct difference in the largest magnitude of the axial velocity at
and
s, for positive and negative
x-coordinates. This was despite the fact that a support-strut was located between the runners and the line for negative
x-coordinates. This means that the flow was not purely axial downstream the runners and that there was some swirl leaving the runners. The remaining swirl rotated the flow profile, causing a close to symmetric flow profile at the velocity line. As the runners were at a stand-still (
), the flow profile was far from symmetric. At
cm, close to zero and reverse flow were encountered at the velocity line. This was explained by the velocity vectors shown in
Figure 6b. At the position of Line 1 (red), the flow rotated back towards the runners. This was while the flow was in the correct direction at the negative
x-coordinates. The reason for the flow appearance at the velocity line was connected to the location of Line 1 in relation to the stand-still position of the runner blades. When the runners were at a stand-still, wakes downstream the runners developed depending on how the runners were oriented. In general, the flow was rather chaotic downstream the runners as the rotational speeds were small or zero. This was because the flow was massively separated at this point, and the resolved solution was expected to show randomness as the SAS model resolved part of the turbulent spectrum. The solver residuals were at this stage in the order of
for momentum,
for pressure, and
for continuity, which indicated a relatively small error at each time step.
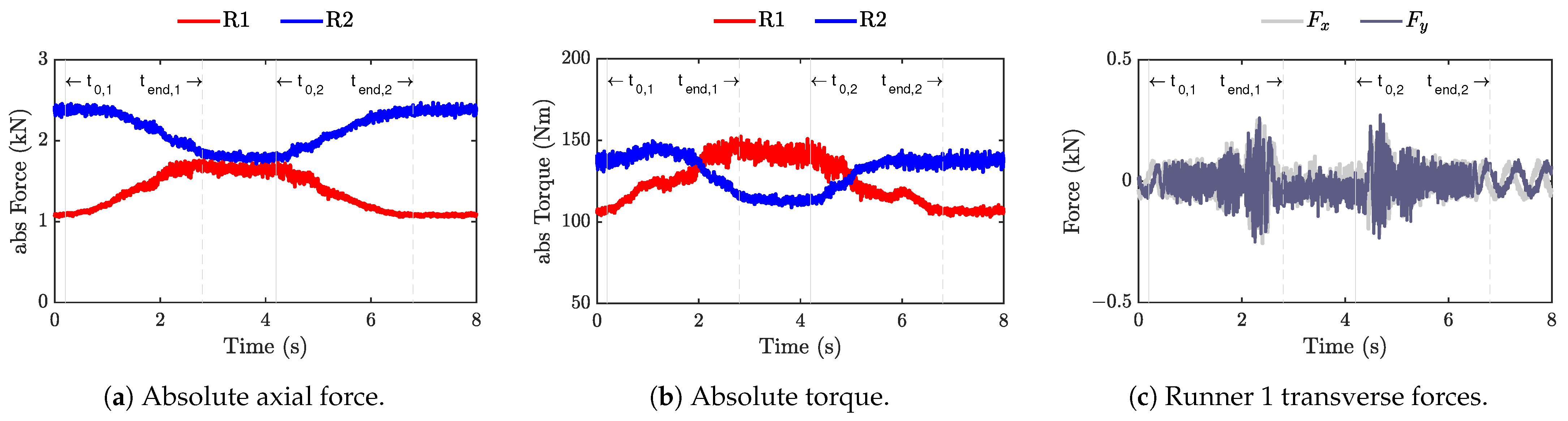
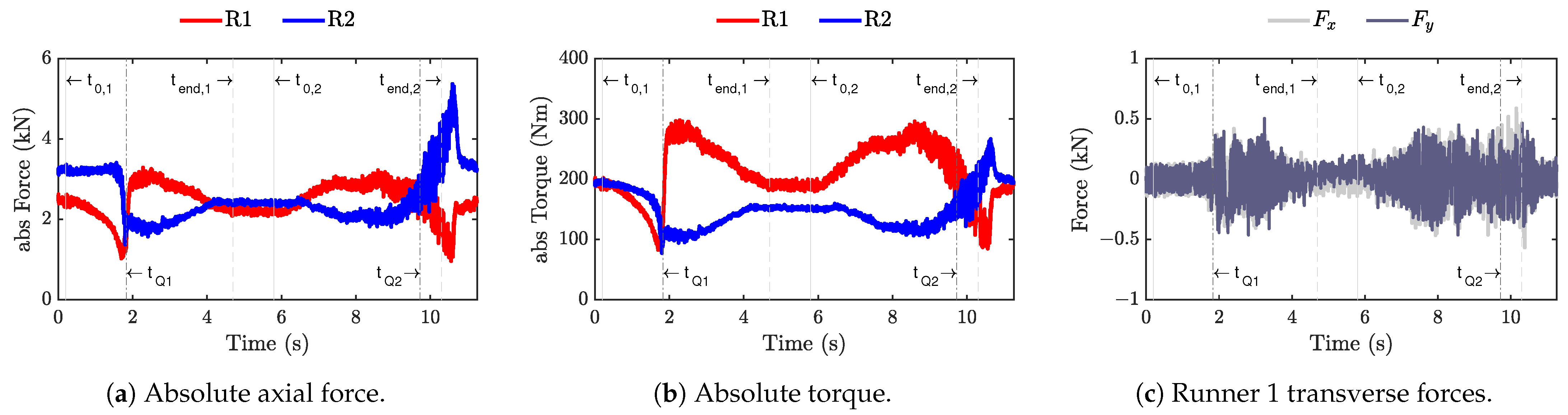
Figure 7a,b shows the absolute axial force and absolute torque, respectively, during the turbine mode transients. The forces and torque acting on the runners were from integrated normal and shear stresses on the hub and blade surfaces of the runners. In the discussions below, the word
absolute is dropped for brevity. The axial force and torque showed a smooth variation without any drastic peaks. As the rotational speeds decreased, the loads of Runner 1 increased and the loads of Runner 2 decreased. The axial force and torque was to a large extent a function of the head, or total pressure drop between the two reservoirs. In this study, the
reservoirs were represented by the pressure boundary conditions at the inlet and the outlet. Thus, the summation of the loads of the two runners must always be rather constant in turbine mode. As the flow of Runner 1 started to separate, due to the intensified swirl coming from Runner 2, the loads increased for Runner 1. As a consequence of the load increase for Runner 1, Runner 2 experienced a decrease in loads. The axial force on the upstream runner was slightly higher when the runners were at a stand-still. This was because Runner 2 faced the upper reservoir, and Runner 1 was in the wake of Runner 2. The torque was higher for Runner 1 since Runner 2 directed the flow in an unfavourable direction towards Runner 1 at a stand-still. When the startup sequence was initiated, at
, the upstream runner experienced an axial load increase while the downstream runner experienced a load decrease. The torque followed the trends of the axial force during the transient sequences. The force variation in the transverse directions for Runner 1 is shown in
Figure 7c as a function of time during the transient sequences in turbine mode. The transverse force fluctuations were rather calm until the rotational speed was low. Between
s to
and
s to
, large transverse force fluctuations were detected for Runner 1. They most likely arose from the flow separation at the blades of Runner 1, shown in
Figure 5. The flow separation caused the formation of large chaotic flow structures at Runner 1’s blades. This generated large force fluctuations in the transverse directions. The transverse forces for Runner 2 (not shown here) did not show such fluctuations when close to stand-still, since Runner 2 did not experience such massive flow separation as Runner 1.
Short-Time Fourier Transform (STFT) was performed to analyse the quantities in the frequency domain, due to the time-varying nature of the obtained signals. Frequency analysis was carried out on the fluctuating component of the pressure-probe P4, shown in
Figure 1b, and the forces acting on the runner surfaces. The fluctuating component of a signal was calculated as:
Here,
is the signal of an arbitrary quantity and
is the instantaneous average of the signal. The instantaneous average was calculated with the Savitzky–Golay filter [
33]. STFT is similar to performing a Fast Fourier Transform (FFT) in different time spans. The STFT uses a window averaging and the FFT average over the whole signal [
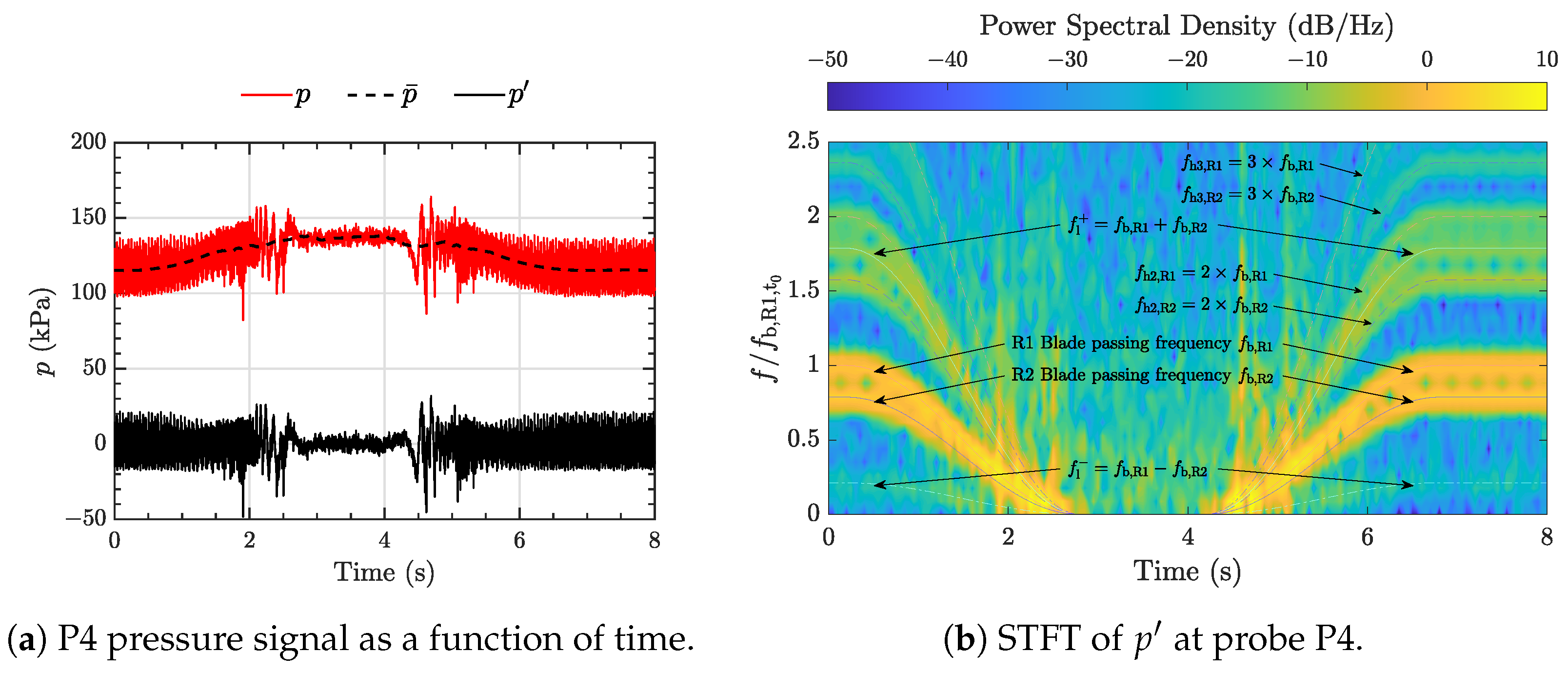
34]. The window size should be chosen in a way to capture all the physical fluctuations. Here, a window size of 0.1 s was chosen to resolve all the high- and low-frequency oscillations. The frequency analysis was performed using the signal processing toolbox of MATLAB and visualised through a spectrogram. Pressure probe P4, located between the runners, was subjected to an STFT analysis in the turbine mode sequences. The fluctuating part of the pressure signal was obtained according to Equation (
6). The static, average, and fluctuating pressures at P4 are shown in
Figure 8a. It was evident from the pressure signal,
p, that the instantaneous average,
, was required in order to calculate the true fluctuating component,
. This was because the pressure signal did not fluctuate around a fixed value as the rotational speeds were changed.
Figure 8b shows an STFT, in a spectrogram, of the fluctuating part of the pressure at P4. The blade passing frequencies,
and
, of the runners showed the highest power in the frequency domain. The second harmonic of the blade passing frequencies,
, were also apparent for both runners, but evidently not as powerful as the main frequencies. The third harmonic,
, was seen at an even weaker power than the second harmonic. Linear combinations of the blade passing frequencies,
, were also recognised through the transient. In a turbomachinery application, it is expected that the blade passing frequency is the dominating frequency close to the runners. This is because the runners produces and cuts strong wakes, resulting in pressure pulsations. The closer one is to the runners, the stronger the dynamics of the runners. The linear combination,
and
, of the blade passing frequencies were caused by runner–runner interaction, as the downstream runner cut the wakes of the upstream runner. Between the times
s and
s, a wider range of white noise was seen in the frequency domain. This was caused by the massive flow separation at the blades of runners, shown in
Figure 5c–e. The white noise showed a peak in power at the same times as the oscillations for the transverse forces for Runner 1 increased (
Figure 7c). The unfavourable oscillations noted as the rotational speed was small should be further analysed and minimised to increase the lifetime of the machine.
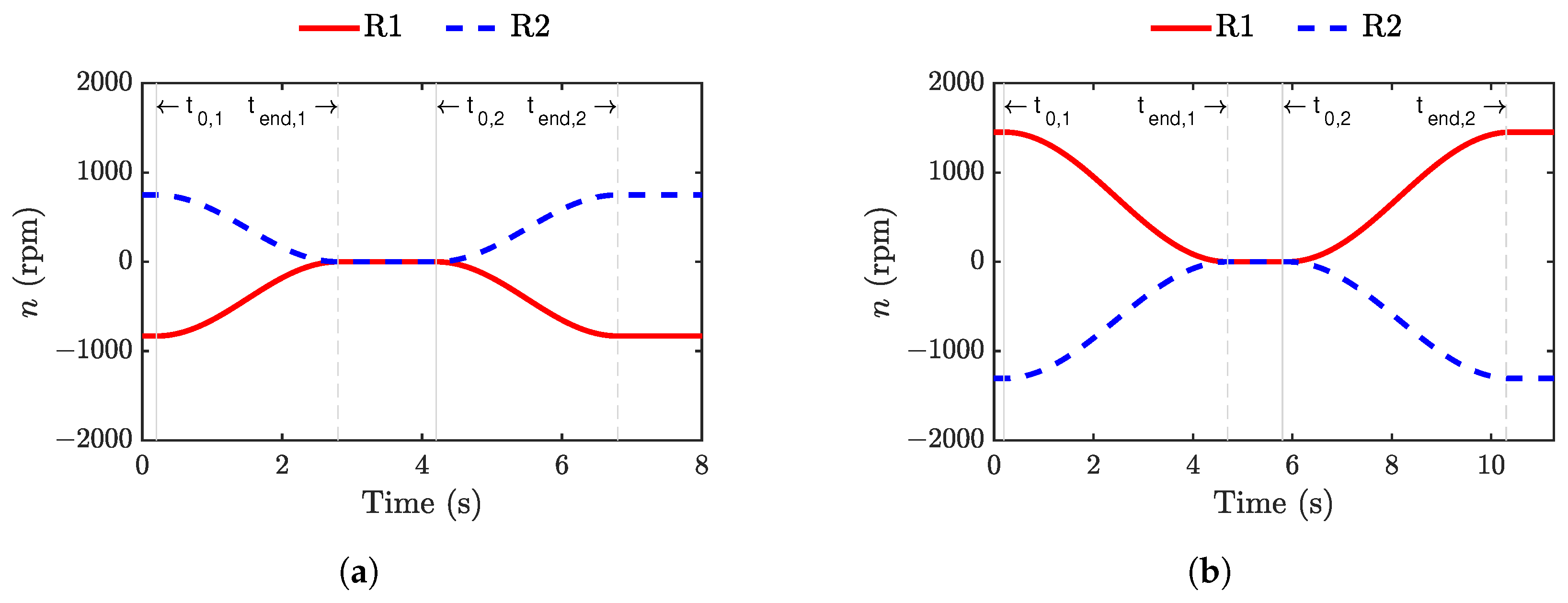
4.2. Pump Mode Transient Sequence
In pump mode, the machine must produce sufficient head to overcome the height elevation and the hydraulic losses between the upper and lower reservoir. If the machine cannot produce enough head, the flow will change direction, and the CRPT no longer works as a pump, but as a mixer. During transient sequences in pump mode, the rotational speed of the runners changed according to
Figure 2b. At the initial time step, the machine operated at the design point with a flow rate of 334 L/s and a net head of 15 m.
Figure 9 shows how the flow rate varied as a function of time during the transient sequences in pump mode. The flow rate was here defined as positive in the preferred pump mode direction (positive
z-direction) and negative as the flow was in reversed direction. The flow rate decelerated with the decreasing rotational speed of the runners. At
, roughly one third into the shutdown sequence, the pump lost the ability to produce enough head. After
, the flow accelerated in the reverse direction (identified here by a negative flow rate value). The rotational speeds of the runners were at this time 1031 rpm and
rpm for Runners 1 and 2, respectively. As the runners were at a stand-still,
, the flow rate was 153 L/s in the reverse direction. When increasing the rotational speeds,
, it was evident that there were hysteresis effects in the flow. Between
and
s, the flow rate slowly decelerated. As the rotational speeds increased further, the machine started to build up some pressure. At
, the flow rate was rapidly decelerated up to
s. At this point, the head of the machine balanced the head of the system as the flow rate was zero. The flow rate started to accelerate rapidly after
. Observe that the flow rate continued to accelerate after
, despite the fact that the runners had a constant speed after this point. This showed that it was not only the rotational speed of the runners that determined the flow rate. This was because it took time for the flow to adjust to the rotational speed, and it depended on if the flow was accelerated or decelerated to the point of operation.
Flow structures during the transient sequences in pump mode are visualised in
Figure 10 with the vorticity magnitude at a number of time steps. The preferred flow direction was from bottom to top, when the machine was functioning properly as a pump. The flow structures changed drastically in number and scale during the shutdown and startup sequences. At time
, the CRPT operated at the design point. No large structures were apparent as the machine managed to maintain a close to axial flow downstream the runners. Vortex shedding from the support-struts was clearly visible at this stage. Already at
s, the machine was less efficient as a pump. This is shown in
Figure 10b by the large angle of the vortices of the downstream support-strut. Between
and 2 s, the flow changed direction, and the machine was no longer able to pump the water in the preferred direction. At the intermediate time step,
s, the machine struggled to balance the flow, and large separation occurred by the blades of both runners. As time progressed (
Figure 10d,e), the rotational speeds decreased further, and the large flow structures followed the reverse flow direction. At time
s, the runners were almost at a stand-still. The turbulent flow field was at this stage fully developed in the reverse flow direction, as shown in
Figure 10f. The flow field was heavily separated by the blades of the runners at the stand-still position. The rotational speed now increased, and at
s, the runners struggled to build up sufficient head and force the flow in the correct pump mode direction. This is shown by the large flow structures on both sides of the runners in
Figure 10g,h. By time
s, the machine pushed the flow in the preferred direction. This is shown in
Figure 10g, as the flow structures now started to travel downstream the runners in the preferred direction. At the final time step,
s, most of the flow structures were flushed out of the domain, and the machine operated at the design point.
Figure 11 shows the axial velocity during the shutdown and startup sequences at Velocity Line 2 in pump mode. Velocity Line 2 is defined in
Figure 1b, and it was located downstream the runners when the machine acted as a pump. Before the reverse flow was encountered,
, the peak axial velocity was found at a vertical position of
cm. A similar, but smaller, peak was noted at
cm. The axial velocity was less at the negative
x-coordinate due to the position of a support-strut in relation to Velocity Line 2. The axial velocity decelerated and accelerated quickly as the flow changed direction. The flow had a rather flat profile between
and 8 s. The velocity rapidly changed at
s as the pump built up the head and pushed the flow in the correct direction. At the final time steps,
s, the familiar pattern from the initial time steps was present.
Figure 12a,b show the absolute axial force and absolute torque as a function of time during the pump mode transients. In the following discussion, the word
absolute is dropped, for brevity. The axial load on Runner 1, initially upstream, decreased with the rotational speed before the flow direction reversed. At the same time, the axial force on Runner 2, initially downstream, was rather constant. At the time of zero flow rate,
, a sudden decrease in both axial force and torque was encountered for Runner 2. As a consequence of this, Runner 1 had a rapid load increase. This means that Runner 2 stopped functioning as a pump before Runner 1 and that Runner 1 had to work against the head of the upper reservoir on its own to a larger extent. As the pressure drop over Runner 2 decreased, the loads on the runner followed. This produced a larger pressure drop, and loads, for Runner 1 as it struggled to produce sufficient head. As the rotational speeds continued to decrease, the axial load became similar for the runners. When the runners were at a stand-still, Runner 2 exhibited a slightly larger axial force than Runner 1. This was because Runner 2 was now upstream and facing the upper reservoir. Runner 1 was now downstream and located in the wakes of Runner 2. As the rotational speeds started to increase, the loads on Runner 1 followed, while the loads on Runner 2 decreased. When approaching the change in flow direction,
, the reverse phenomena was noted, and at
, the axial forces of the runners matched one another. After this point, Runner 1 experienced a large decrease in axial force and torque, and Runner 2 had a rapid increase, until the tipping-point at
s was reached. A plausible explanation for the load decrease for Runner 1 and the load increase for Runner 2 is as follows. Runner 2 managed to build up head before Runner 1, which means a large pressure drop and thus loads for Runner 2. This was because Runner 1 did not yet manage to produce sufficient pressure just upstream of Runner 2. After the tipping-point, the axial force and torque converged to their initial values. The rapid variations of the axial force and torque were most likely not a desirable feature, as large loads can damage or deteriorate the machine prematurely. By examining the forces in the transverse directions for Runner 1, shown in
Figure 12c, large oscillations were noted between
and
. These force variations in the transverse direction most likely arose from the chaotic flow separation occurring by the blades of the runners. The transverse force fluctuations may have a negative impact on the lifetime of the machine. This is because large fluctuating forces are well connected to fatigue.
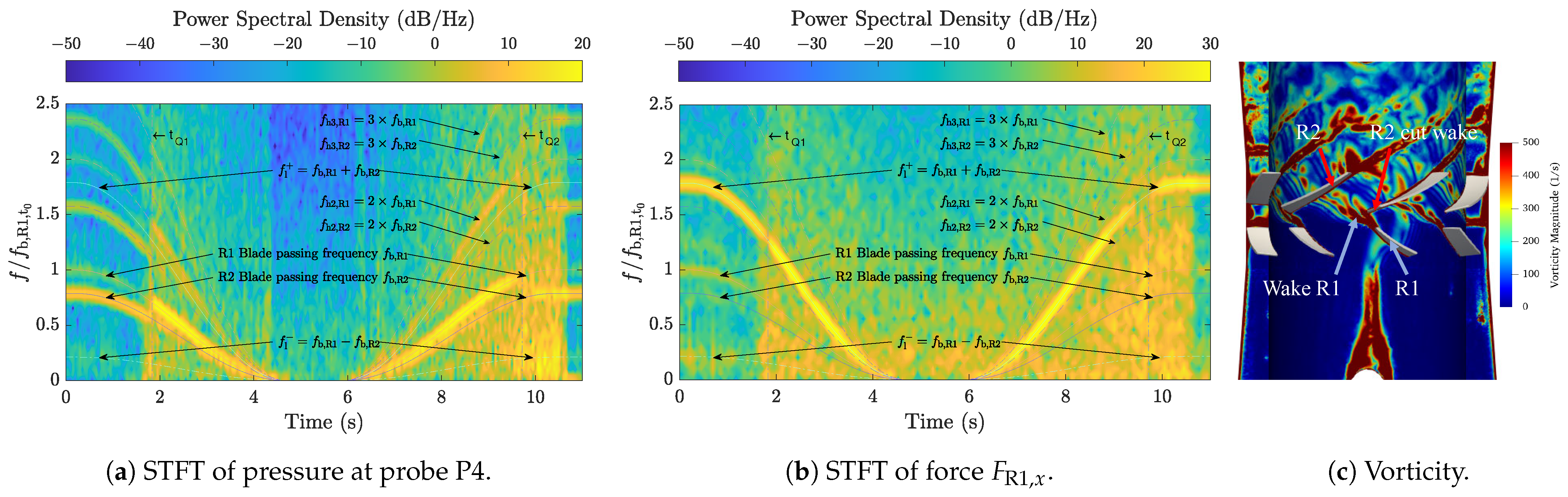
In
Figure 13a,b, the STFT for pressure probe P4 and the transverse force
are presented. P4 was located between the runners, and
was the force in the
x-direction on Runner 1. At the pressure probe P4, the blade passing frequencies of the runners,
and
, showed a strong power through the transient sequences. At the initial and final time steps (
), the blade passing frequency of Runner 2,
, showed a stronger power than the blade passing frequency of Runner 1,
. As the flow rate changed direction (
),
exceeded
in intensity. The Runner 1 blade passing frequency was in fact stronger than that of Runner 2 until the flow was once again reversed to the preferred direction (
). Hence, it was found that the stagnation pressure of the downstream runner was always stronger than the wakes from the upstream runner at P4. This was because Runner 1 was initially upstream and Runner 2 downstream, so as the flow changed direction, the strongest blade passing frequency changed as well. The second harmonic frequencies of Runner 2,
, and Runner 1,
, showed the same behaviour as the main blade passing frequencies. The third harmonic frequencies,
, and linear combinations,
and
, of the blade passing frequencies were apparent at P4, but at a lower intensity. For the transverse force
(
Figure 13b), the positive linear combination of the blade passing frequencies,
, of the runners showed the strongest power throughout the transients. The blade passing frequencies,
and
, of the two runners were also clearly visible for
, but not as strong as the positive linear combination. An explanation why it was the positive linear combination that had a decisive impact is as follows. The pulsations from each runner were caused by the wakes of each runner, and the linear combination, on the other hand, was caused by the cutting of the upstream runner wakes by the downstream runner. This phenomenon is shown at the design point in
Figure 13c. Here, Runner 2 was downstream, and it cut the wakes of the upstream Runner 1. The wakes from the upstream runner were a low-pressure zone. It was cut by a high, stagnation, pressure from the leading edge of the downstream runner. This interaction impacted the pressure, and thus force, pulsations on the runners. The large pressure difference explained why the positive linear combination of the blade passing frequency had a strong impact on the transverse force component,
. As stated by Lengani et al. [
35], any linear combination of the blade passing frequencies can possibly be excited due to the runner–runner interaction of a counter-rotating machine. In addition to the positive linear combination,
, the negative linear combination,
, was also seen through the transient sequences. At the pressure probe (
Figure 13a), the signal showed a significant amount of noise at the times related to a zero flow rate. This was because flow structures were formed and dissolved irregularly over a wide range of scales between the runners, as indicated by the vorticity in
Figure 10. The pressure signal was rather smooth as the runners were at a stand-still. The STFT for the transverse force, shown in
Figure 13b, revealed a wider range of frequencies and white noise in the signal. This was plausibly due to the flow separation occurring by the blades of the runner. The flow separation interacted with the transverse force over a wide range of scales, which explained the white noise. It was however the typical frequencies correlated to the rotation of the runners that had the strongest power.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}