
Electrical Load Prediction Using Interval Type-2 Atanassov Intuitionist Fuzzy System: Gravitational Search Algorithm Tuning Approach



Abstract
1. Introduction
2. Attanassov Intuitionist Fuzzy System
2.1. Attanassov Intutionist Fuzzy Set
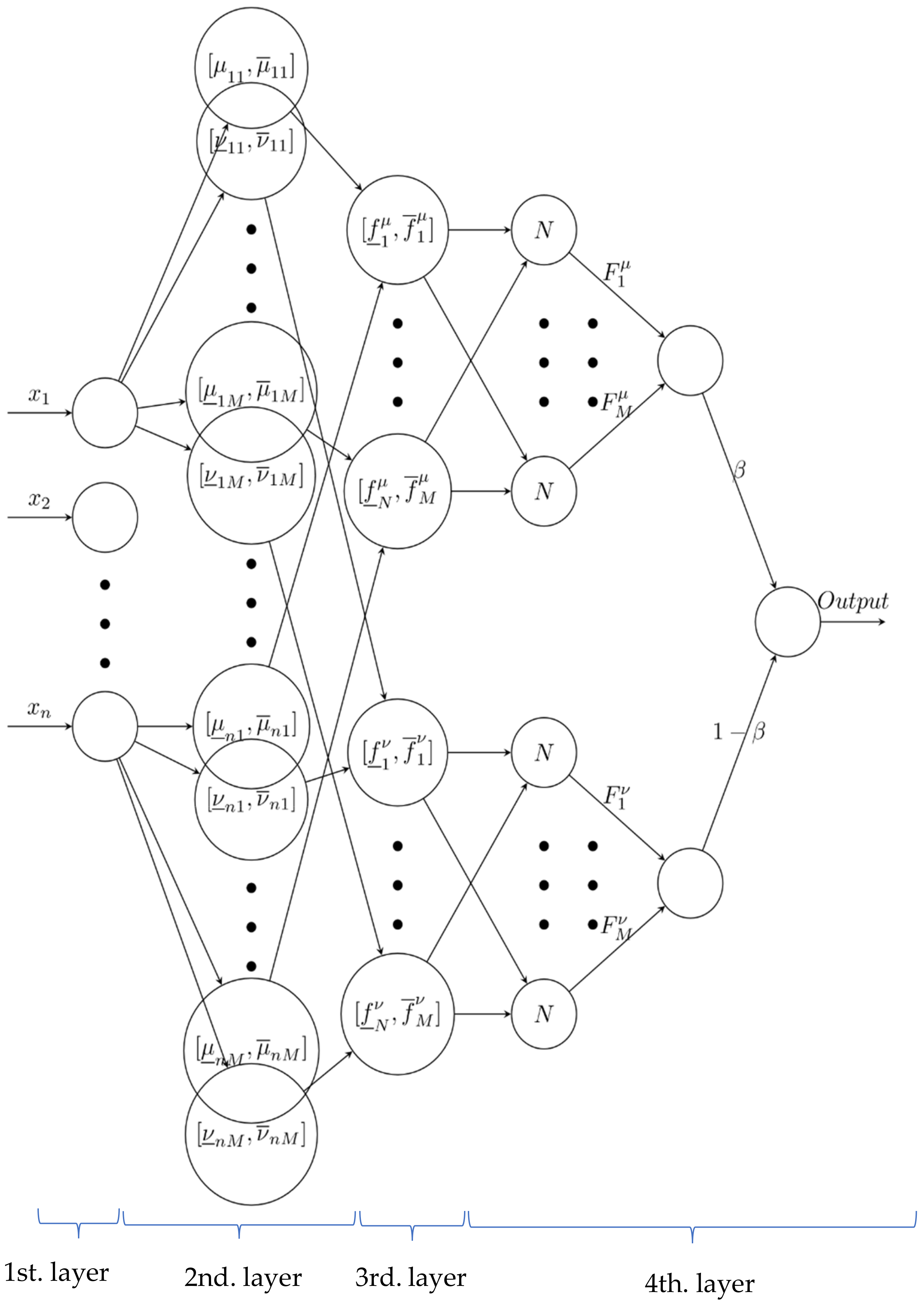
2.2. Structure of Attanassov Intutionist Fuzzy System
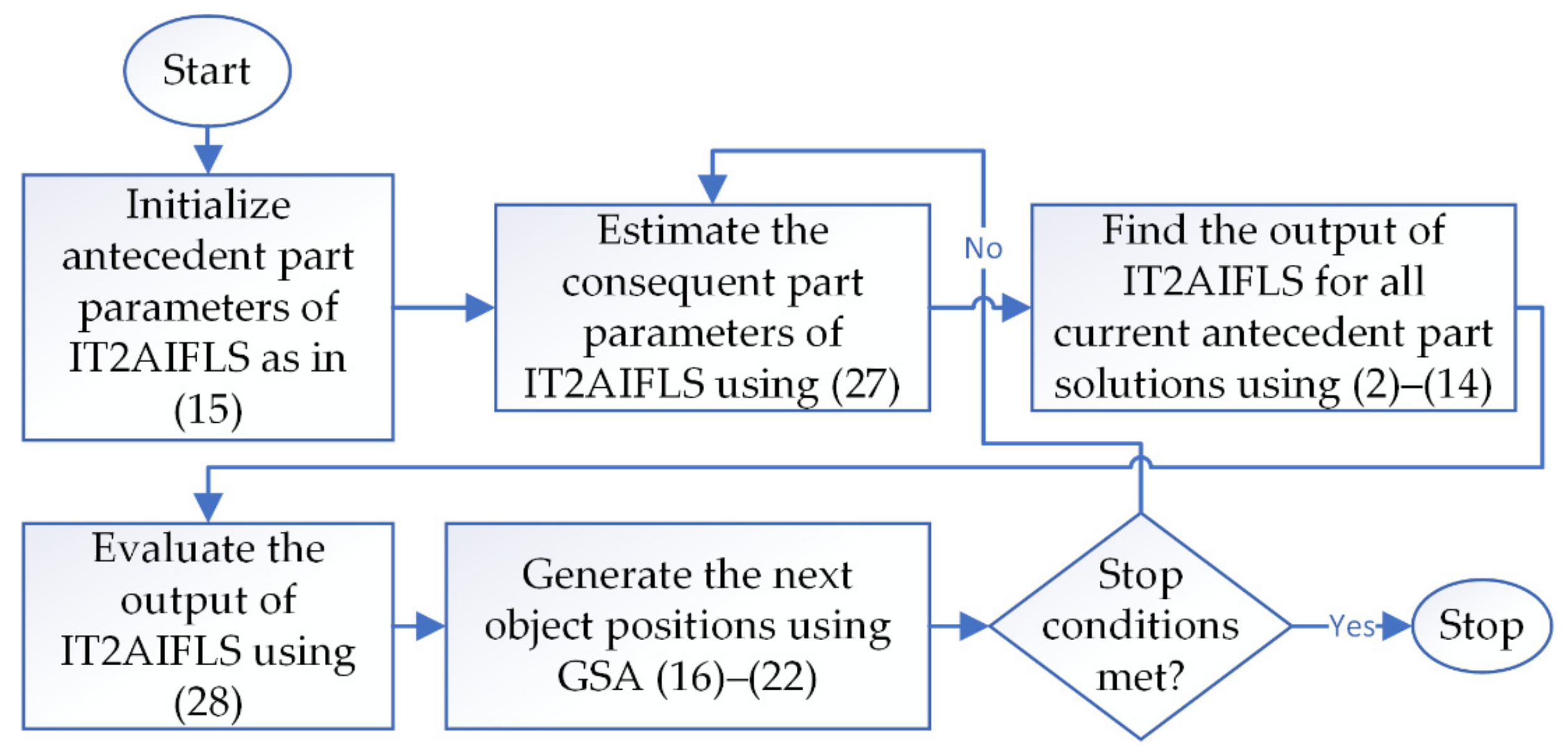
3. Methodology
3.1. GSA Optimization of Antecdent Part Parameters
3.2. Ridge Least Square Estimation of Consequent Part Parameters
3.3. Performance Measurement
4. Simulation Results
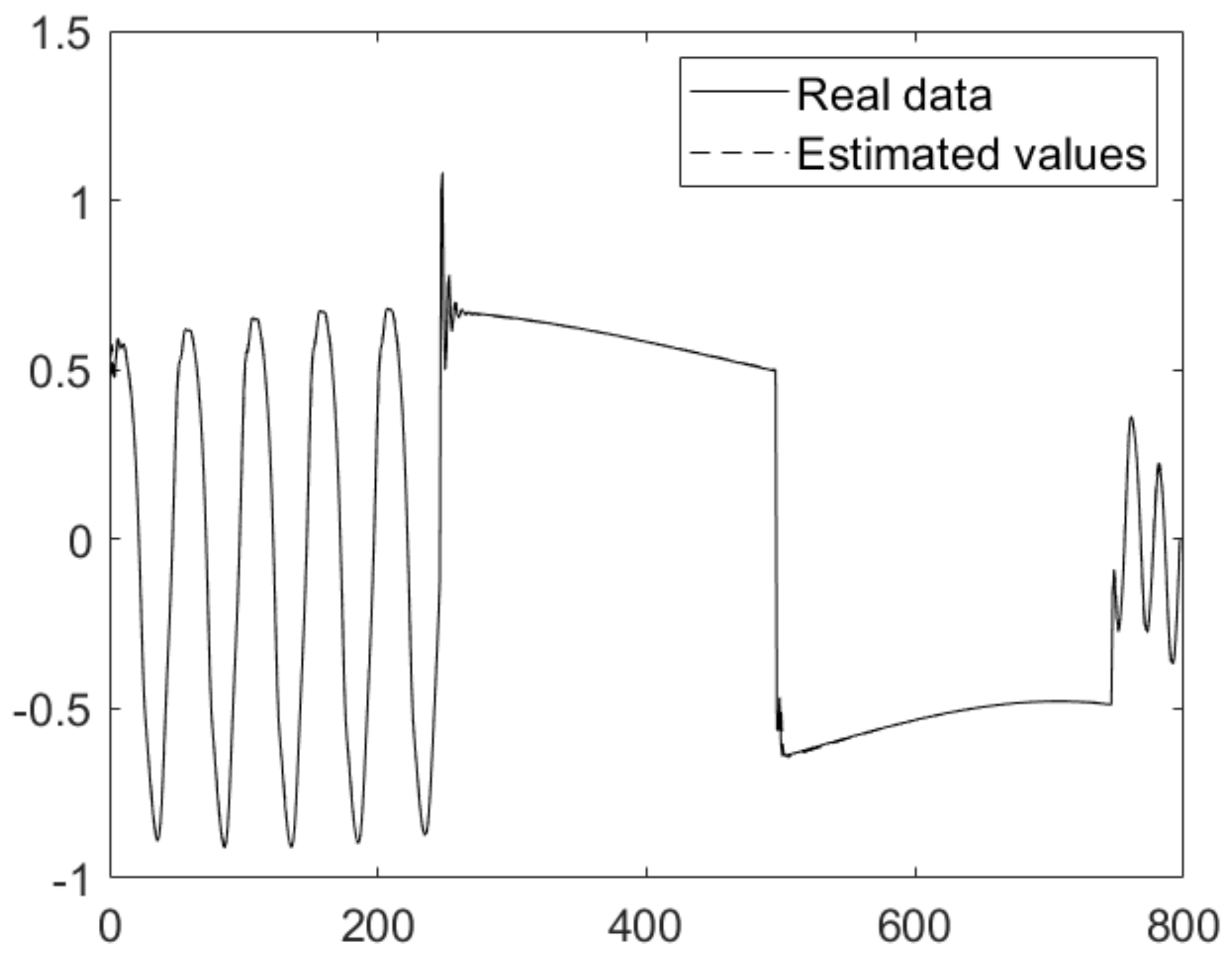
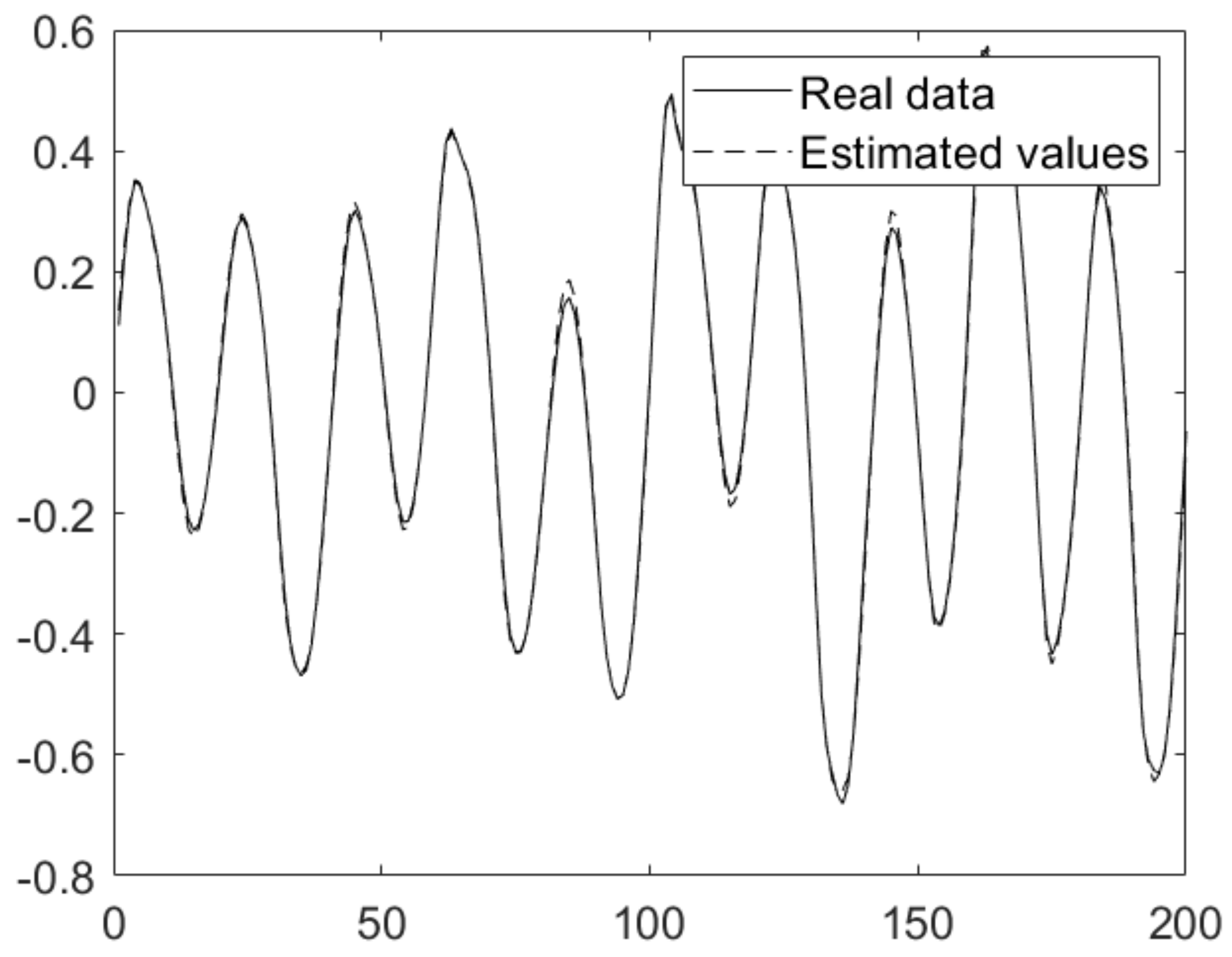
4.1. Benchmark Identification Problem
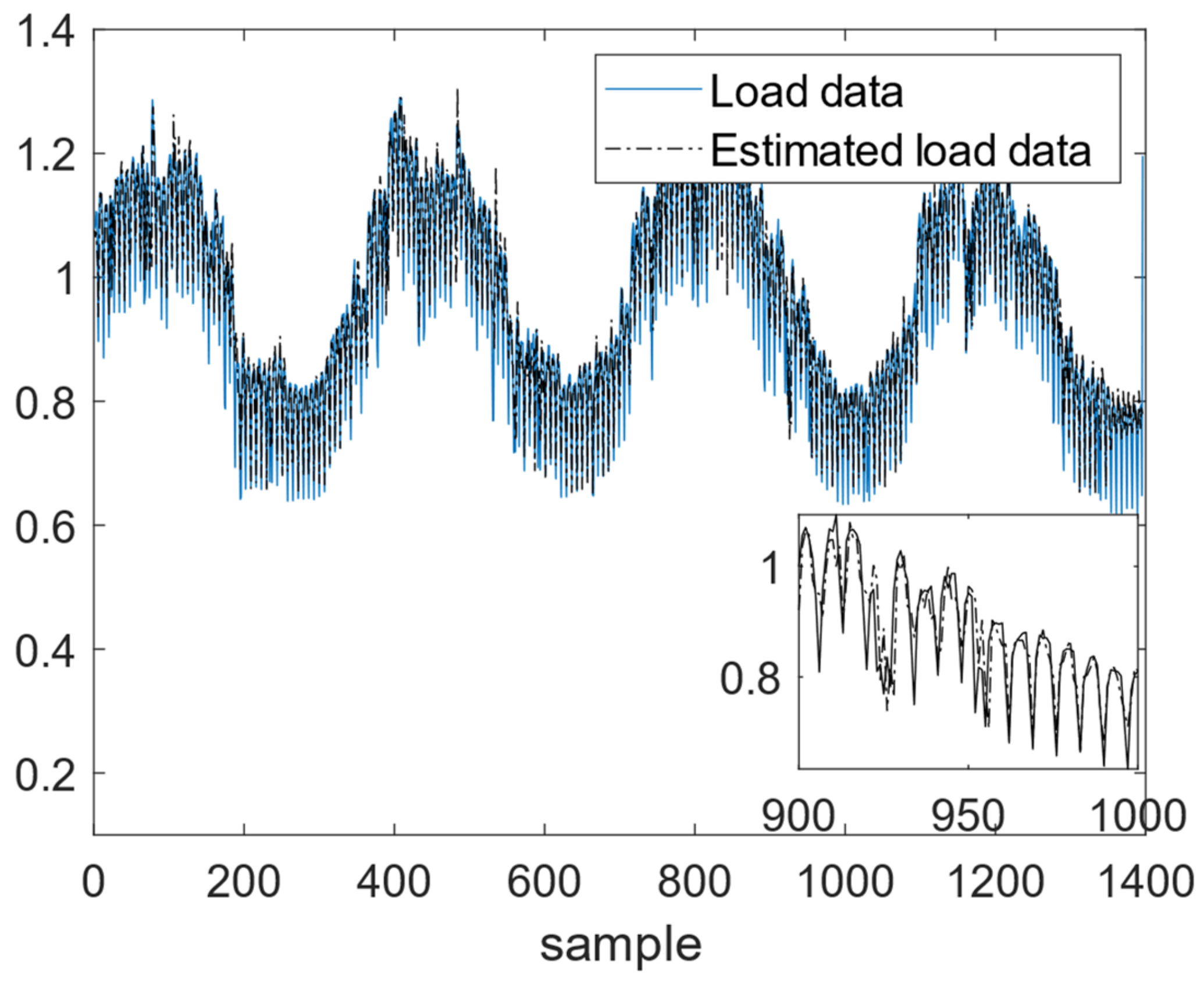
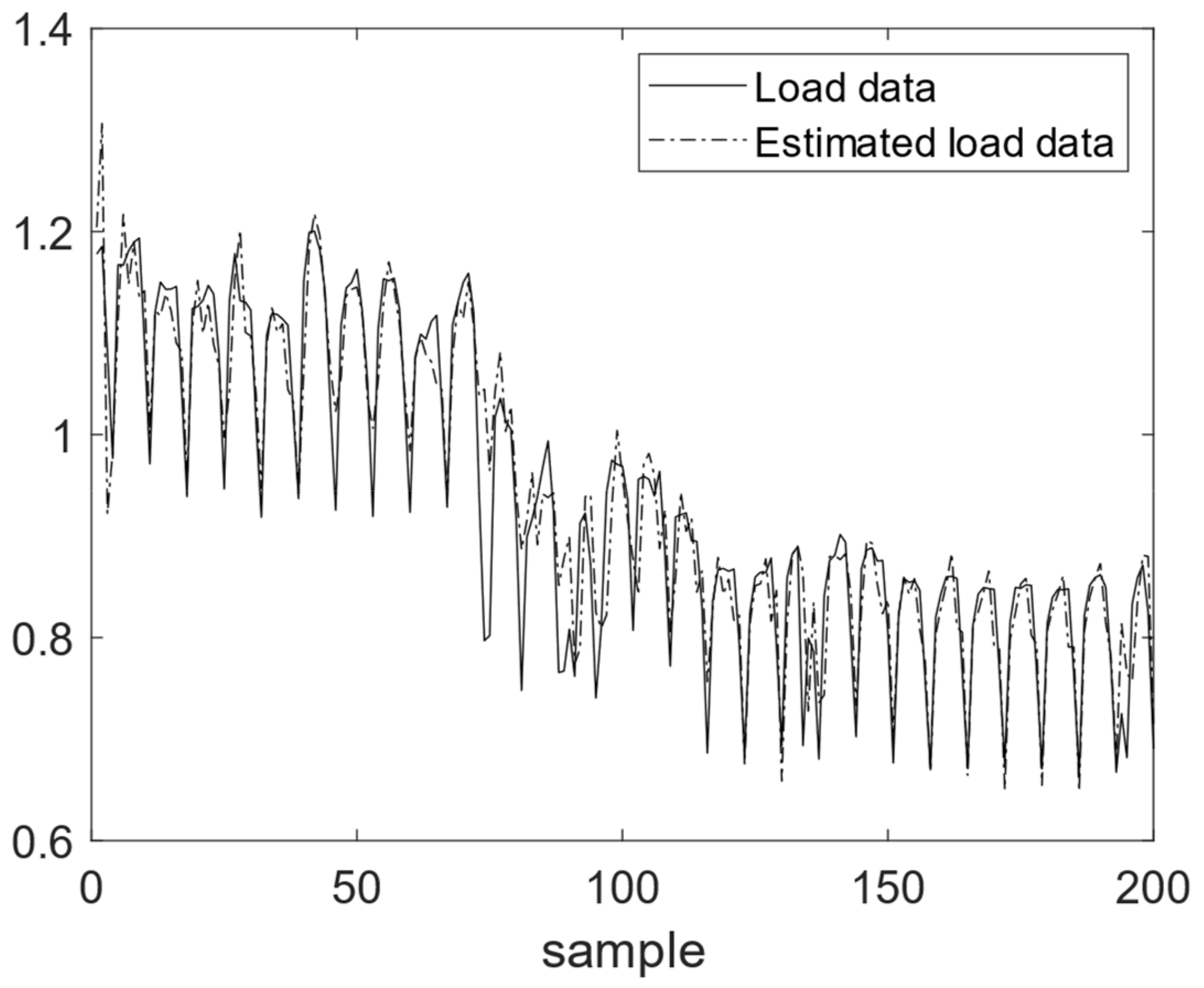
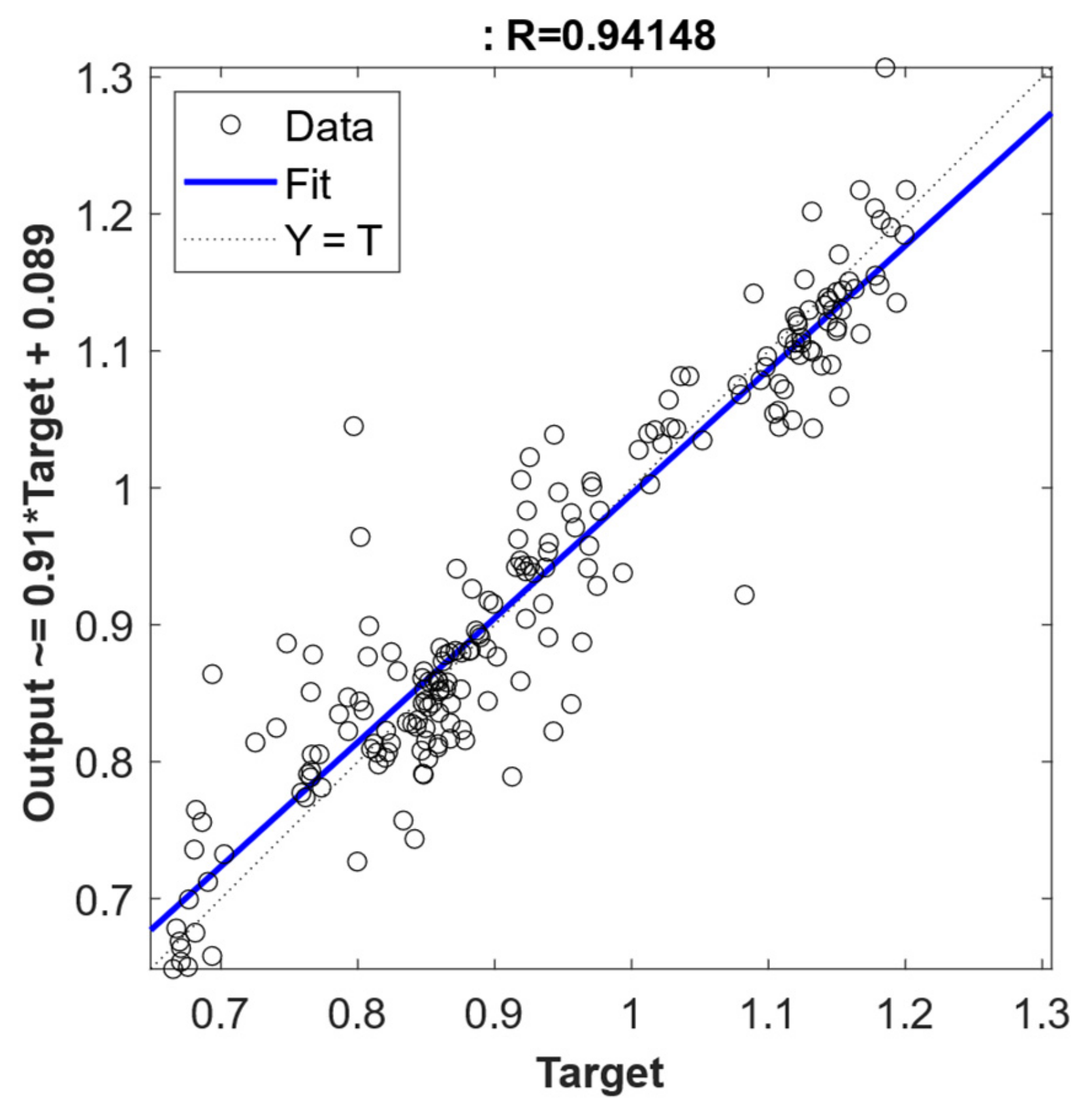
4.2. Electrical Load Prediction for Poland
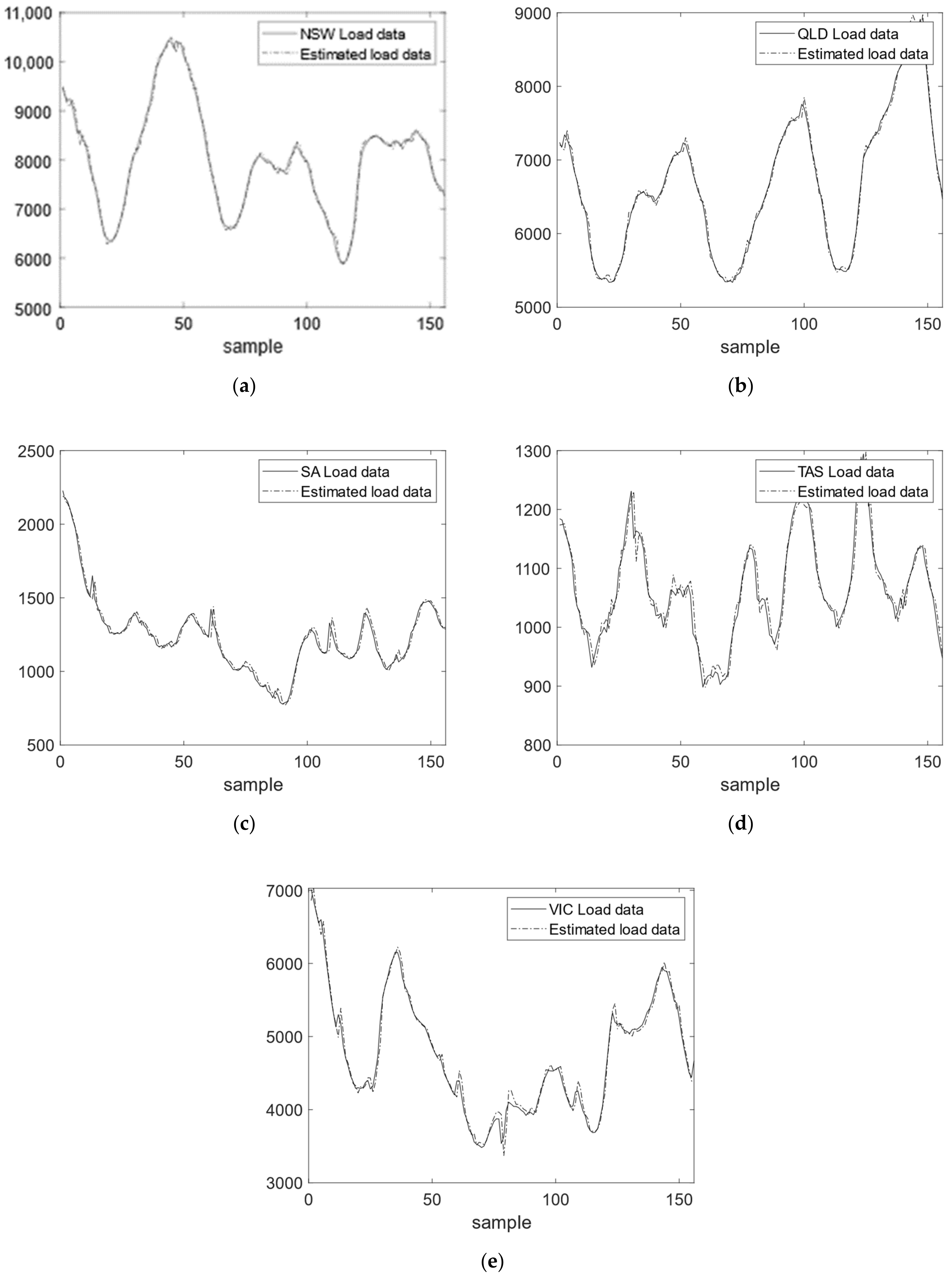
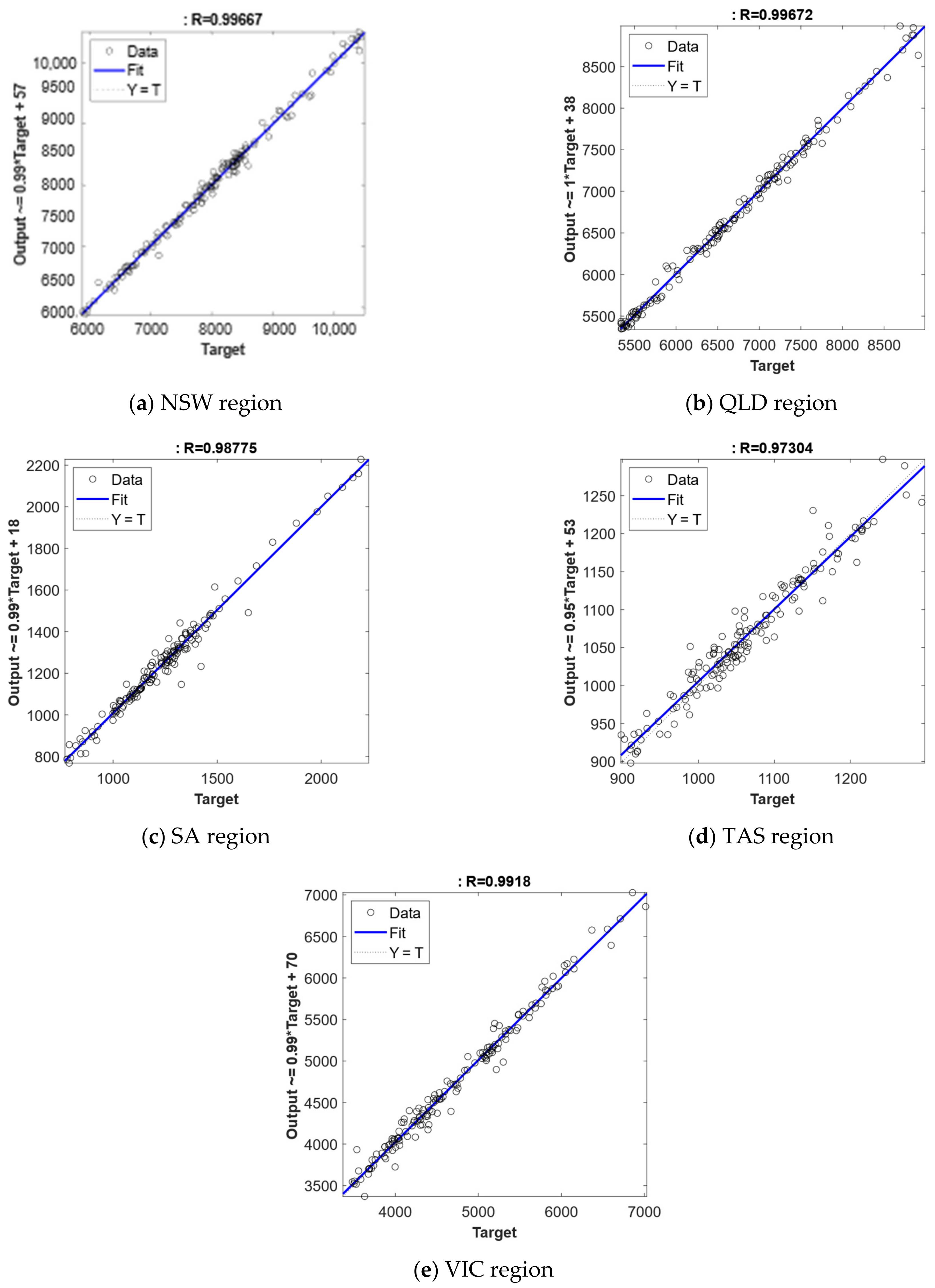
4.3. Electrical Load Prediction for Five regions in Australia
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hassan, S.; Khosravi, A.; Jaafar, J.; Khanesar, M.A. A systematic design of interval type-2 fuzzy logic system using extreme learning machine for electricity load demand forecasting. Int. J. Electr. Power Energy Syst. 2016, 82. [Google Scholar] [CrossRef]
- Wu, D.; Wang, B.; Precup, D.; Boulet, B. Multiple Kernel Learning-Based Transfer Regression for Electric Load Forecasting. IEEE Trans. Smart Grid 2020, 11, 1183–1192. [Google Scholar] [CrossRef]
- Bunn, D.; Farmer, E.D. Comparative Models for Electrical Load Forecasting. John Wiley and Sons Inc.: New York, NY, USA, 1985. [Google Scholar]
- Dutta, G.; Mitra, K. A literature review on dynamic pricing of electricity. J. Oper. Res. Soc. 2017, 68, 1131–1145. [Google Scholar] [CrossRef]
- Ma, J.; Jiang, H.; Huang, K.; Bi, Z.; Man, K.L. Novel Field-Support Vector Regression-Based Soft Sensor for Accurate Estimation of Solar Irradiance. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 3183–3191. [Google Scholar] [CrossRef]
- Ma, K.; Soltani, M.; Hajizadeh, A.; Zhu, J.; Chen, Z. Wind Farm Power Optimization and Fault Ride-through under Inter-Turn Short-Circuit Fault. Energies 2021, 14, 3072. [Google Scholar] [CrossRef]
- Ma, K.; Zhu, J.; Soltani, M.; Hajizadeh, A.; Chen, Z. Optimal power dispatch of an offshorewind farm under generator fault. Appl. Sci. 2019, 9, 1184. [Google Scholar] [CrossRef]
- Jiang, Y.; Yin, S.; Dong, J.; Kaynak, O. A Review on Soft Sensors for Monitoring, Control and Optimization of Industrial Processes. IEEE Sens. J. 2020, 21. [Google Scholar] [CrossRef]
- Contreras, J.; Espínola, R.; Nogales, F.J.; Conejo, A.J. ARIMA models to predict next-day electricity prices. IEEE Trans. Power Syst. 2003, 18, 1014–1020. [Google Scholar] [CrossRef]
- Li, W.; Zhang, Z.G. Based on time sequence of ARIMA model in the application of short-term electricity load forecasting. In Proceedings of the 2009 International Conference on Research Challenges in Computer Science, Shanghai, China, 28–29 December 2009; pp. 11–14. [Google Scholar] [CrossRef]
- Eyoh, I.; John, R.; de Maere, G.; Kayacan, E. Hybrid Learning for Interval Type-2 Intuitionistic Fuzzy Logic Systems as Applied to Identification and Prediction Problems. IEEE Trans. Fuzzy Syst. 2018, 26, 2672–2685. [Google Scholar] [CrossRef]
- Member, S.; John, R. Interval Type-2 A-Intuitionistic Fuzzy Logic for Regression Problems. IEEE Trans. Fuzzy Syst. 2018, 26, 2396–2408. [Google Scholar]
- Eyoh, I.; John, R.; de Maere, G. Interval Type-2 Intuitionistic Fuzzy Logic Systems-A Comparative Evaluation. In Proceedings of the International Conference on Information Processing and Management of Uncertainty in Knowledge-Based Systems, Cádiz, Spain, 11–15 June 2018; pp. 687–698. [Google Scholar]
- Shoorehdeli, M.A.; Teshnehlab, M.; Sedigh, A.K. Training ANFIS as an identifier with intelligent hybrid stable learning algorithm based on particle swarm optimization and extended Kalman filter. Fuzzy Sets Syst. 2009, 160, 922–948. [Google Scholar] [CrossRef]
- Hassan, S.; Khanesar, M.A.; Jaafar, J.; Khosravi, A. Comparative analysis of three approaches of antecedent part generation for an IT2 TSK FLS. Appl. Soft Comput. J. 2017, 51, 130–144. [Google Scholar] [CrossRef]
- Olivas, F.; Valdez, F.; Melin, P.; Sombra, A.; Castillo, O. Interval type-2 fuzzy logic for dynamic parameter adaptation in a modified gravitational search algorithm. Inf. Sci. 2019, 476, 159–175. [Google Scholar] [CrossRef]
- Khanesar, M.A.; Branson, D. XOR binary gravitational search algorithm. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 3269–3274. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Duman, S.; Güvenç, U.; Sönmez, Y.; Yörükeren, N. Optimal power flow using gravitational search algorithm. Energy Convers. Manag. 2012, 59, 86–95. [Google Scholar] [CrossRef]
- Purcaru, C.; Precup, R.E.; Iercan, D.; Fedorovici, L.O.; David, R.C.; Dragan, F. Optimal robot path planning using gravitational search algorithm. Int. J. Artif. Intell. 2013, 10, 1–20. [Google Scholar]
- Long, T.; Jiao, W.; He, G. RPC Estimation via l1-Norm-Regularized Least Squares (L1LS). IEEE Trans. Geosci. Remote Sens. 2015, 53, 4554–4567. [Google Scholar] [CrossRef]
- Khalaf, M.M.; Alharbi, S.O.; Chammam, W. Similarity measures between temporal complex intuitionistic fuzzy sets and application in pattern recognition and medical diagnosis. Discret. Dyn. Nat. Soc. 2019, 2019, 3246439. [Google Scholar] [CrossRef]
- Atanassov, K.T. On intuitionistic Fuzzy Sets Theory; Springer: Berlin/Heidelberg, Germany, 2012; Volume 283. [Google Scholar]
- Castillo, O.; Atanassov, K. Comments on Fuzzy Sets, Interval Type-2 Fuzzy Sets, General Type-2 Fuzzy Sets and Intuitionistic Fuzzy Sets; Springer International Publishing: Cham, Switzerland, 2019; Volume 372. [Google Scholar]
- Eyoh, I.; Eyoh, J.; Kalawsky, R. Interval Type-2 Intuitionistic Fuzzy Logic System for Time Series and Identification Problems—A Comparative Study. Int. J. Fuzzy Log. Syst. 2020, 10, 1–17. [Google Scholar] [CrossRef]
- Kayacan, E.; Khanesar, M.A. Fuzzy Neural Networks for Real Time Control Applications: Concepts, Modeling and Algorithms for Fast Learning; Butterworth-Heinemann: Oxford, UK, 2015. [Google Scholar]
- Abiyev, R.H.; Kaynak, O. Type 2 fuzzy neural structure for identification and control of time-varying plants. IEEE Trans. Ind. Electron. 2010, 57, 4147–4159. [Google Scholar] [CrossRef]
- Lin, Y.Y.; Liao, S.H.; Chang, J.Y.; Lin, C.T. Simplified interval type-2 fuzzy neural networks. IEEE Trans. Neural Networks Learn. Syst. 2014, 25, 959–969. [Google Scholar] [CrossRef]
- Juang, C.-F.; Tsao, Y.-W. A Self-Evolving Interval Type-2 Fuzzy Neural Network with Online Structure and Parameter Learning. Fuzzy Syst. IEEE Trans. 2008, 16, 1411–1424. [Google Scholar] [CrossRef]
- Lin, Y.Y.; Chang, J.Y.; Lin, C.T. A TSK-type-based self-evolving compensatory interval type-2 fuzzy neural network (TSCIT2FNN) and its applications. IEEE Trans. Ind. Electron. 2014, 61, 447–459. [Google Scholar] [CrossRef]
- Khanesar, M.A.; Branson, D.T. Prediction Interval Identification Using Interval Type-2 Fuzzy Logic Systems: Lake Water Level Prediction Using Remote Sensing Data. IEEE Sens. J. 2021, 1–13. [Google Scholar] [CrossRef]
- Applications of Machine Learning Group. 2019. Available online: https://research.cs.aalto.fi/aml/datasets.shtml (accessed on 14 June 2021).
- Lendasse, A.; Cottrell, M.; Wertz, V.; Verleysen, M. Prediction of electric load using Kohonen maps—Application to the polish electricity consumption. Proc. Am. Control Conf. 2002, 5, 3684–3689. [Google Scholar] [CrossRef]
- Wu, J.; Cui, Z.; Chen, Y.; Kong, D.; Wang, Y.G. A new hybrid model to predict the electrical load in five states of Australia. Energy 2019, 166, 598–609. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rules | Epoch | Training RMSE | Testing RMSE | |
|---|---|---|---|---|
| Type-1 TSK FNS [27] | 9 | 100 | 0.0282 | 0.0598 |
| Type-2 TSK FNS [27] | 4 | 100 | 0.0284 | 0.0601 |
| Feedorward Type-2 FNN [11] | 3 | 100 | 0.0281 | 0.0593 |
| SIT2FNN [28] | 4 | 100 | 0.0351 | 0.0560 |
| SEIT2 FNN [29] | 3 | 100 | 0.0274 | 0.0574 |
| TSCIT2FNN [30] | 3 | 100 | 0.0279 | 0.0576 |
| IT2 FNN-GD [26] | - | 200 | 0.0540 | 0.0613 |
| IT2 FNN-SMC [26] | - | 200 | 0.0360 | 0.0390 |
| IT2 FNNPSO+ SMC [26] | - | 200 | 0.0199 | 0.0390 |
| IT2 IFLS -DEKF+GD [11] | 4 | 100 | 0.0250 | 0.0310 |
| IT2FLS with Modified SVR [31] | 11 | Non-iterative | 0.0146 | 0.0348 |
| Proposed approach | 14 | 200 | 0.0095 | 0.0106 |
| Test | Value | Critical Value (5% Confidence Interval) |
|---|---|---|
| ADF-test | −2.55 | −2.86 |
| KPSS-test | 0.34 | 0.46 |
| Model | Train/Test | RMSE Train | RMSE Test |
|---|---|---|---|
| IT2FLS DEKF+GD [11] | 1395/196 | 0.0564 | 0.0595 |
| IFLS DEKF+GD [11] | 1395/196 | 0.0589 | 0.0599 |
| IT2 IFLS DEKF+GD [11] | 1395/196 | 0.0560 | 0.0572 |
| IT2AIFLS GSA-R-LS (proposed algorithm) | 1395/196 | 0.0528 | 0.0501 |
| Type of Data | Number of Samples | Min | Max | Mean | Std | Skewness | |
|---|---|---|---|---|---|---|---|
| NSW | Train | 1152 | 5809.3 | 12846 | 8288 | 1306.7 | 0.35 |
| Test | 96 | 5884.2 | 8563.3 | 7618.2 | 754.5 | −0.67 | |
| QLD | Train | 1152 | 5127.4 | 9480.1 | 6737.8 | 1020.5 | 0.73 |
| Test | 96 | 5337.0 | 8910.9 | 6821.9 | 1060.0 | 0.22 | |
| SA | Train | 1152 | 816.3 | 2798.0 | 1447.6 | 377.8 | 1.13 |
| Test | 96 | 778.0 | 1479.8 | 1134.5 | 179.4 | 0.03 | |
| TAS | Train | 1152 | 896.0 | 1302.1 | 1082.0 | 88.38 | 0.03 |
| Test | 96 | 902.7 | 1294.1 | 1072.1 | 90.25 | 0.28 | |
| VIC | Train | 1152 | 3601.6 | 9044.9 | 5049.3 | 927.04 | 1.15 |
| Test | 96 | 3482.3 | 5945.2 | 4466.2 | 692.3 | 0.49 |
| Dataset | ADF TestValue | Critical Value (5% Confidence Interval) for ADF | KPSS Test | Critical Value (5% Confidence Interval) for KPSS | Result |
|---|---|---|---|---|---|
| NSW | −5.05 | −2.86 | 0.45 | 0.46 | Stationary |
| QLD | −6.07 | −2.86 | 0.69 | 0.46 | Difference stationary |
| SA | −3.99 | −2.86 | 0.39 | 0.46 | stationary |
| TAS | −5.95 | −2.86 | 0.15 | 0.46 | stationary |
| VIC | −4.46 | −2.86 | 0.25 | 0.46 | stationary |
| SVR [34] | ANN [34] | ELM [34] | EEMD-ELM_GOA [34] | EEMD-ELM-DA [34] | EEMD-ELM-PSO [34] | EEMD-ELM-GWO [34] | Proposed Approach | MPI | |
|---|---|---|---|---|---|---|---|---|---|
| NSW | 2351 | 1468 | 1651 | 603 | 684 | 839 | 766 | 89 | 85% |
| QLD | 905 | 717 | 705 | 564 | 336 | 941 | 558 | 76 | 77% |
| SA | 552 | 380 | 381 | 154 | 155 | 261 | 207 | 41 | 73% |
| TAS | 168 | 192 | 162 | 61 | 81 | 257 | 139 | 20 | 67% |
| VIC | 1323 | 975 | 961 | 419 | 499 | 877 | 975 | 103 | 75% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khanesar, M.A.; Lu, J.; Smith, T.; Branson, D. Electrical Load Prediction Using Interval Type-2 Atanassov Intuitionist Fuzzy System: Gravitational Search Algorithm Tuning Approach. Energies 2021, 14, 3591. https://doi.org/10.3390/en14123591
Khanesar MA, Lu J, Smith T, Branson D. Electrical Load Prediction Using Interval Type-2 Atanassov Intuitionist Fuzzy System: Gravitational Search Algorithm Tuning Approach. Energies. 2021; 14(12):3591. https://doi.org/10.3390/en14123591
Chicago/Turabian StyleKhanesar, Mojtaba Ahmadieh, Jingyi Lu, Thomas Smith, and David Branson. 2021. "Electrical Load Prediction Using Interval Type-2 Atanassov Intuitionist Fuzzy System: Gravitational Search Algorithm Tuning Approach" Energies 14, no. 12: 3591. https://doi.org/10.3390/en14123591
APA StyleKhanesar, M. A., Lu, J., Smith, T., & Branson, D. (2021). Electrical Load Prediction Using Interval Type-2 Atanassov Intuitionist Fuzzy System: Gravitational Search Algorithm Tuning Approach. Energies, 14(12), 3591. https://doi.org/10.3390/en14123591