
Fault-Tolerant Battery Power Network Architecture of Networked Swappable Battery Packs in Parallel


Abstract

1. Introduction
2. Battery Power Network System
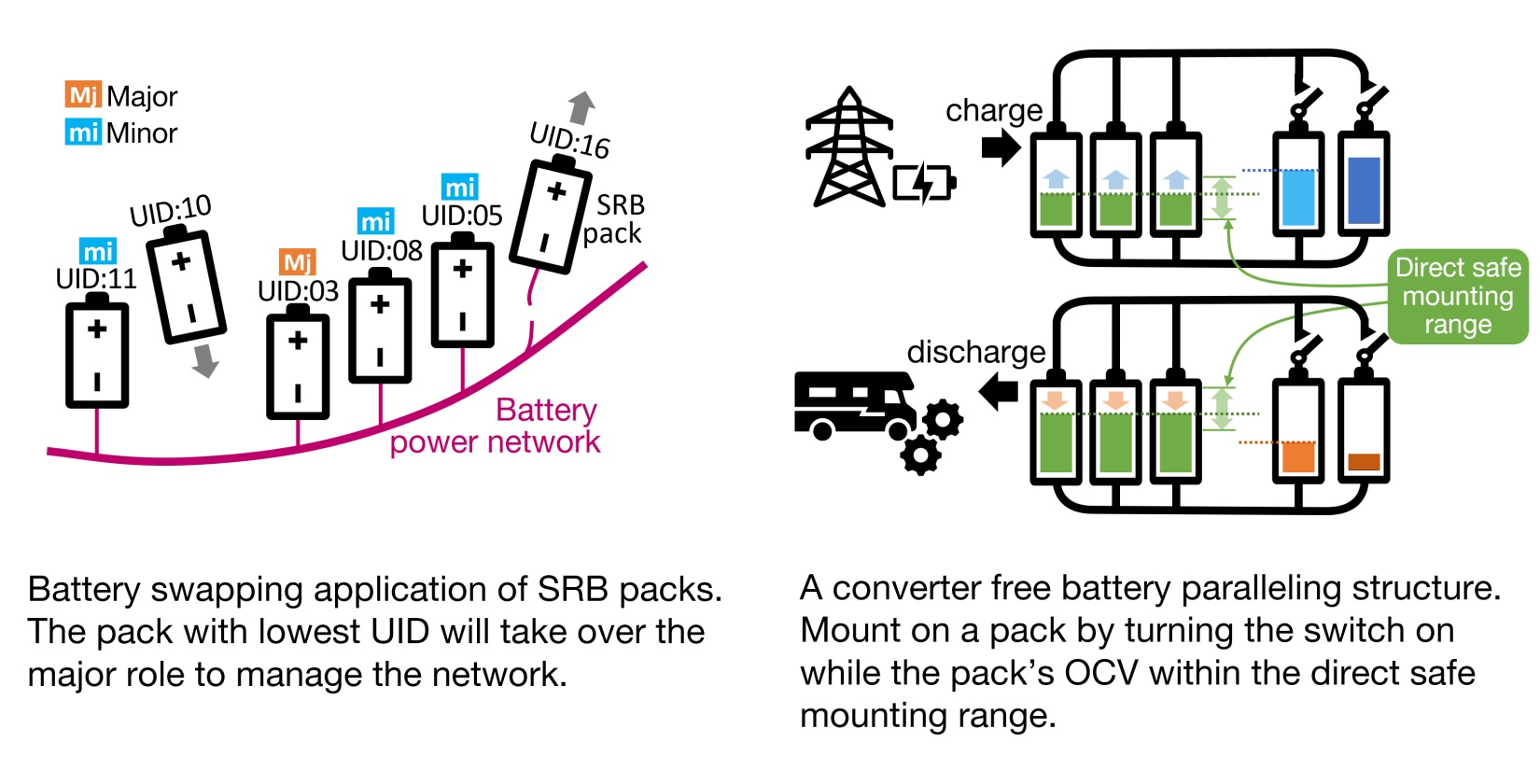
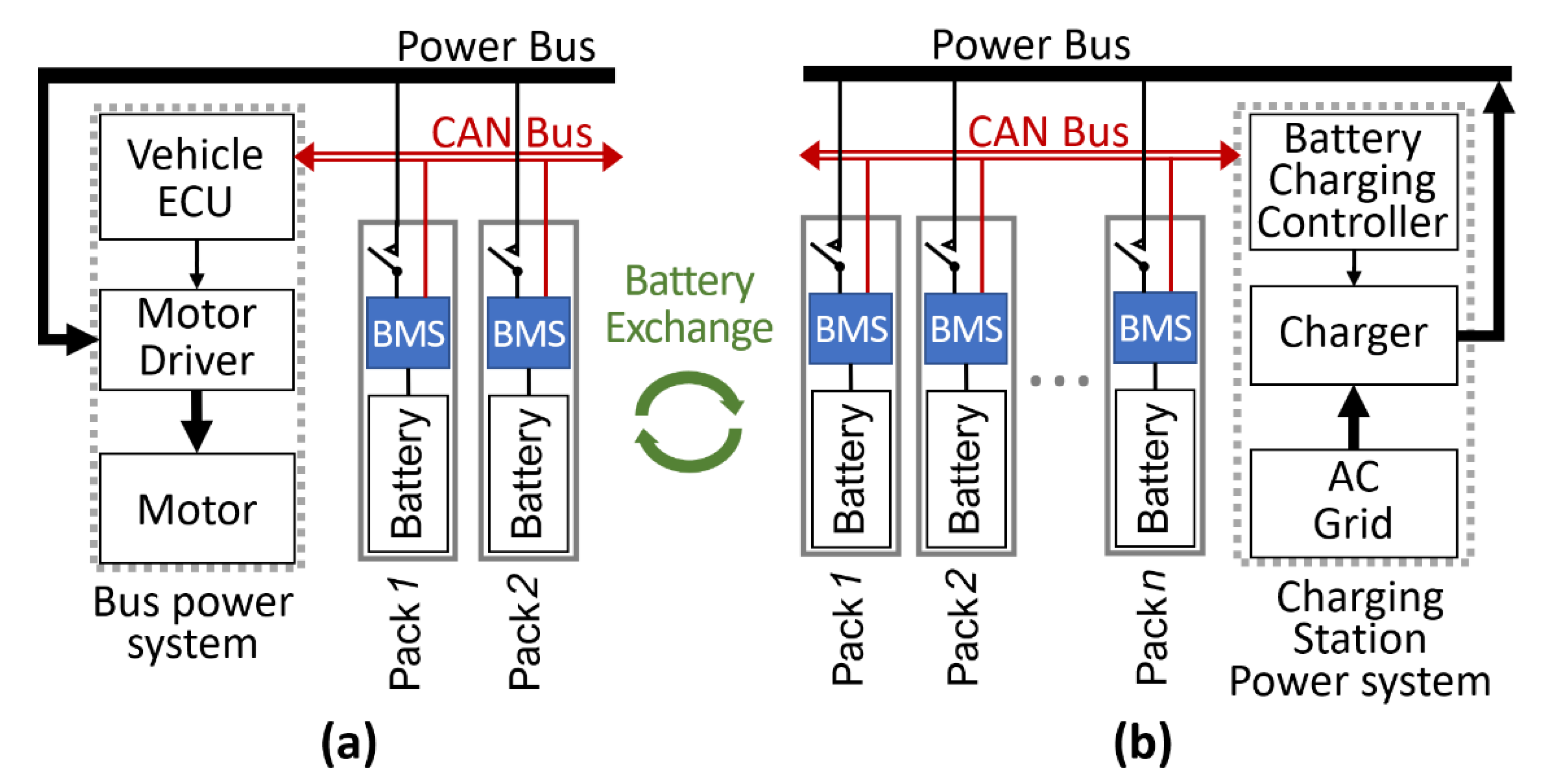
2.1. Structure of the Battery Exchange Power Network System
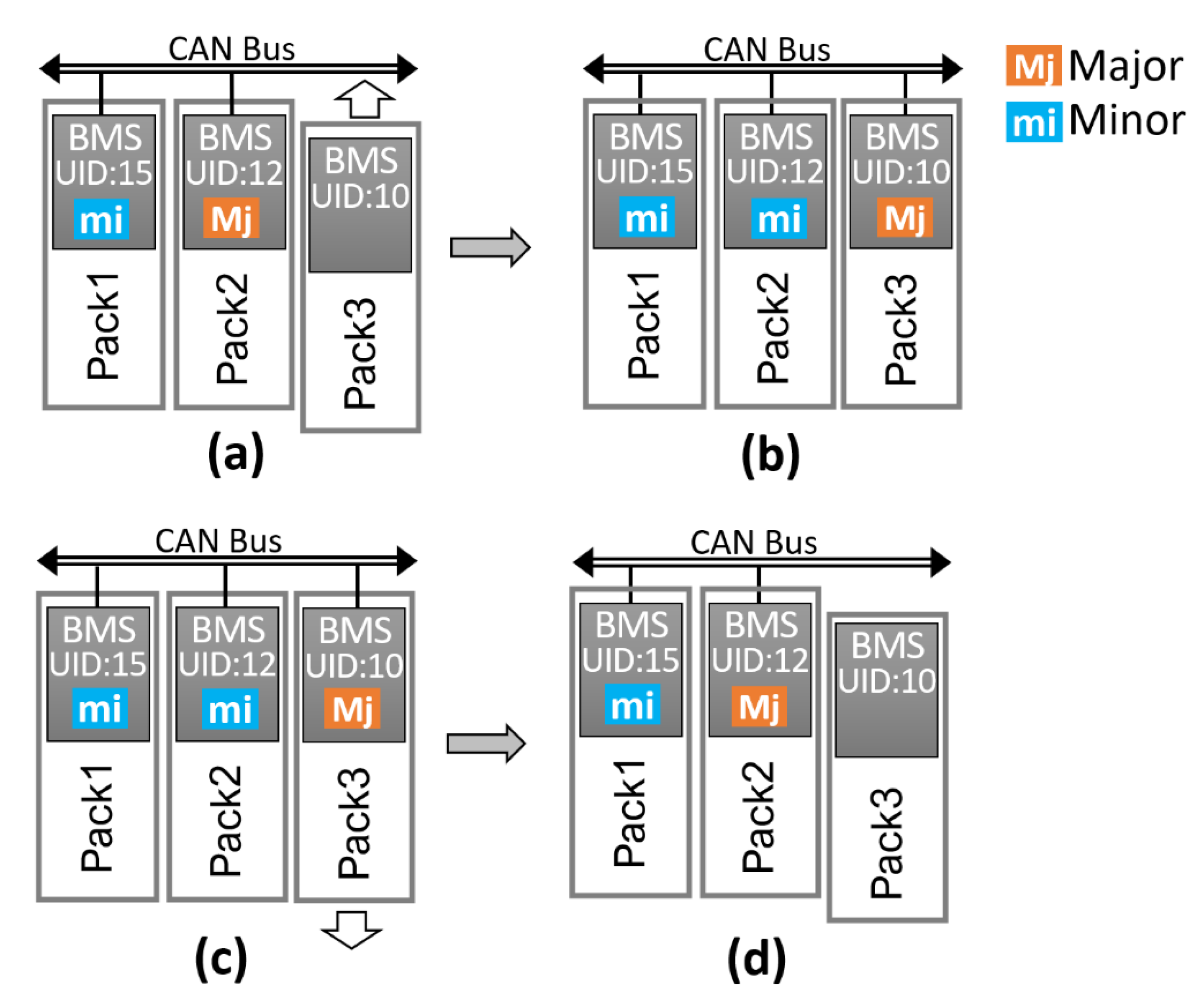
2.2. Determination of Major SRB Pack
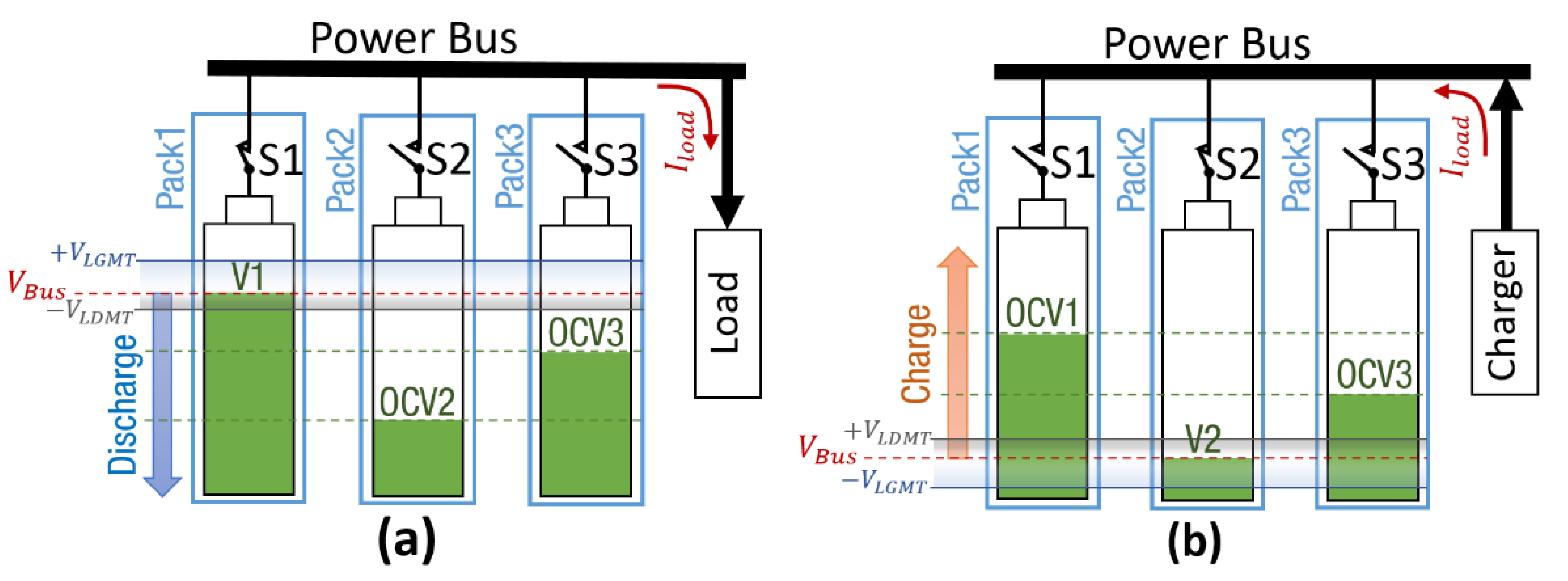
2.3. Direct Safe Mounting Threshold Voltage Formulas
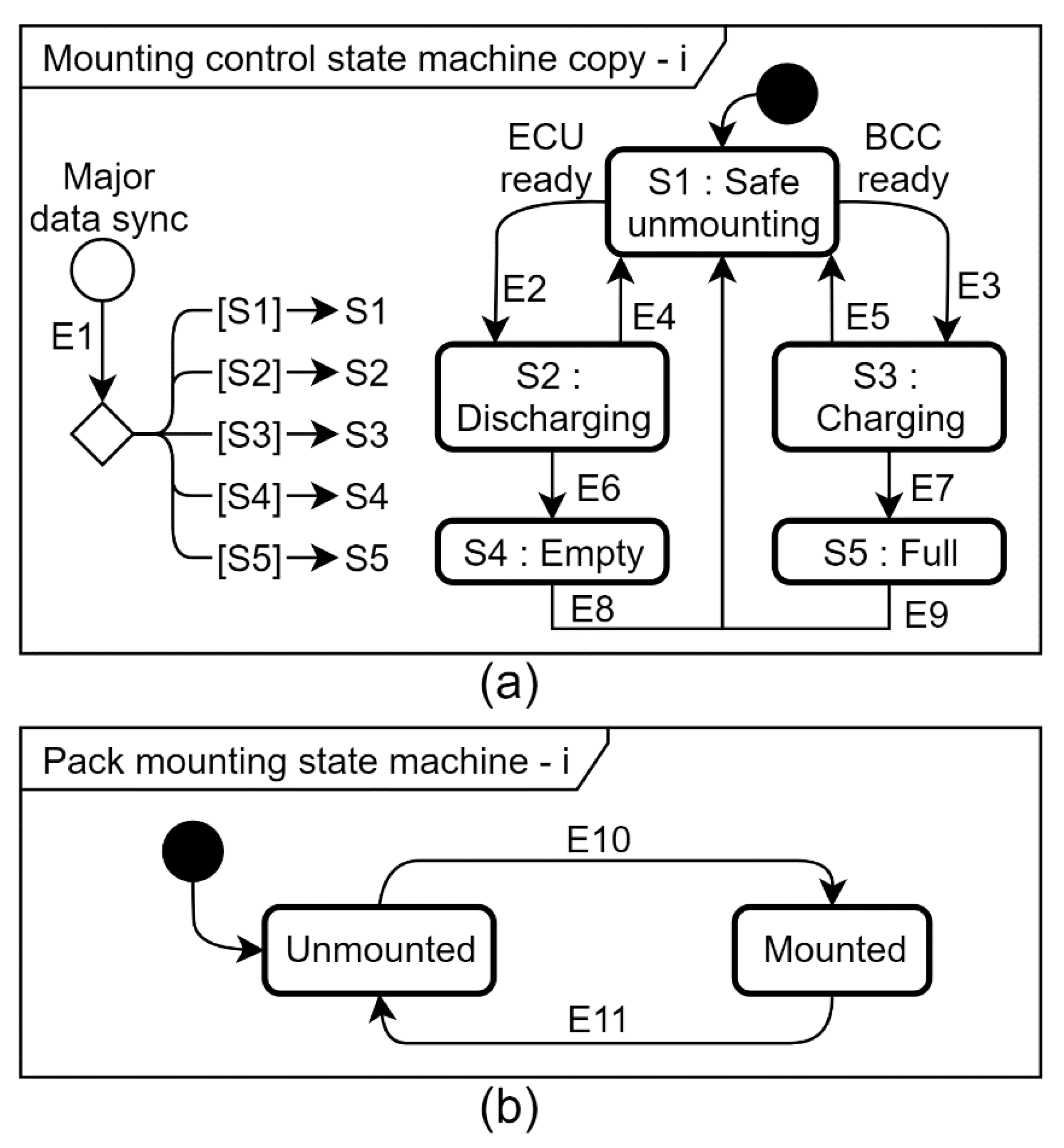
2.4. Mounting and Unmounting Control State Machine
3. Experiment
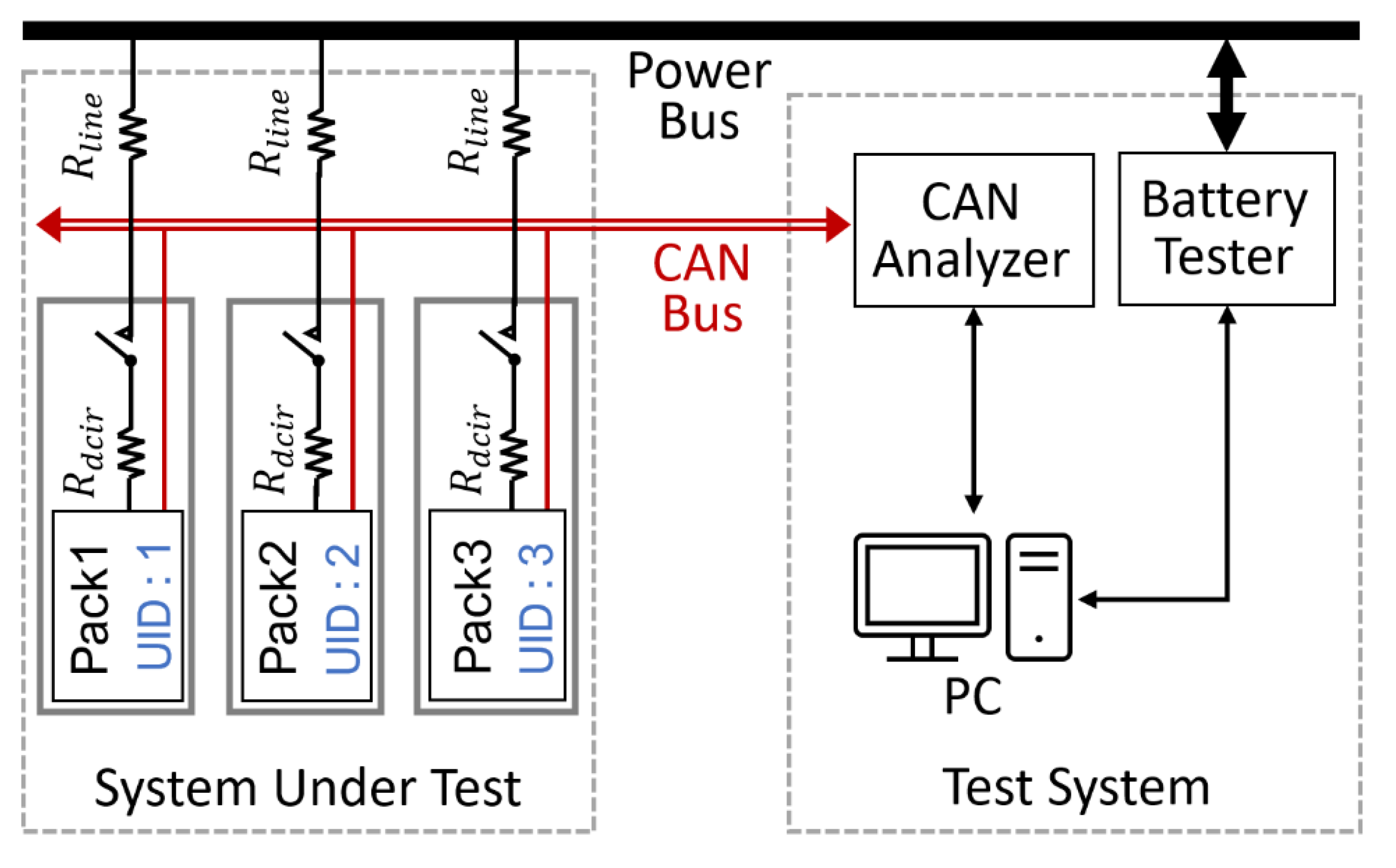
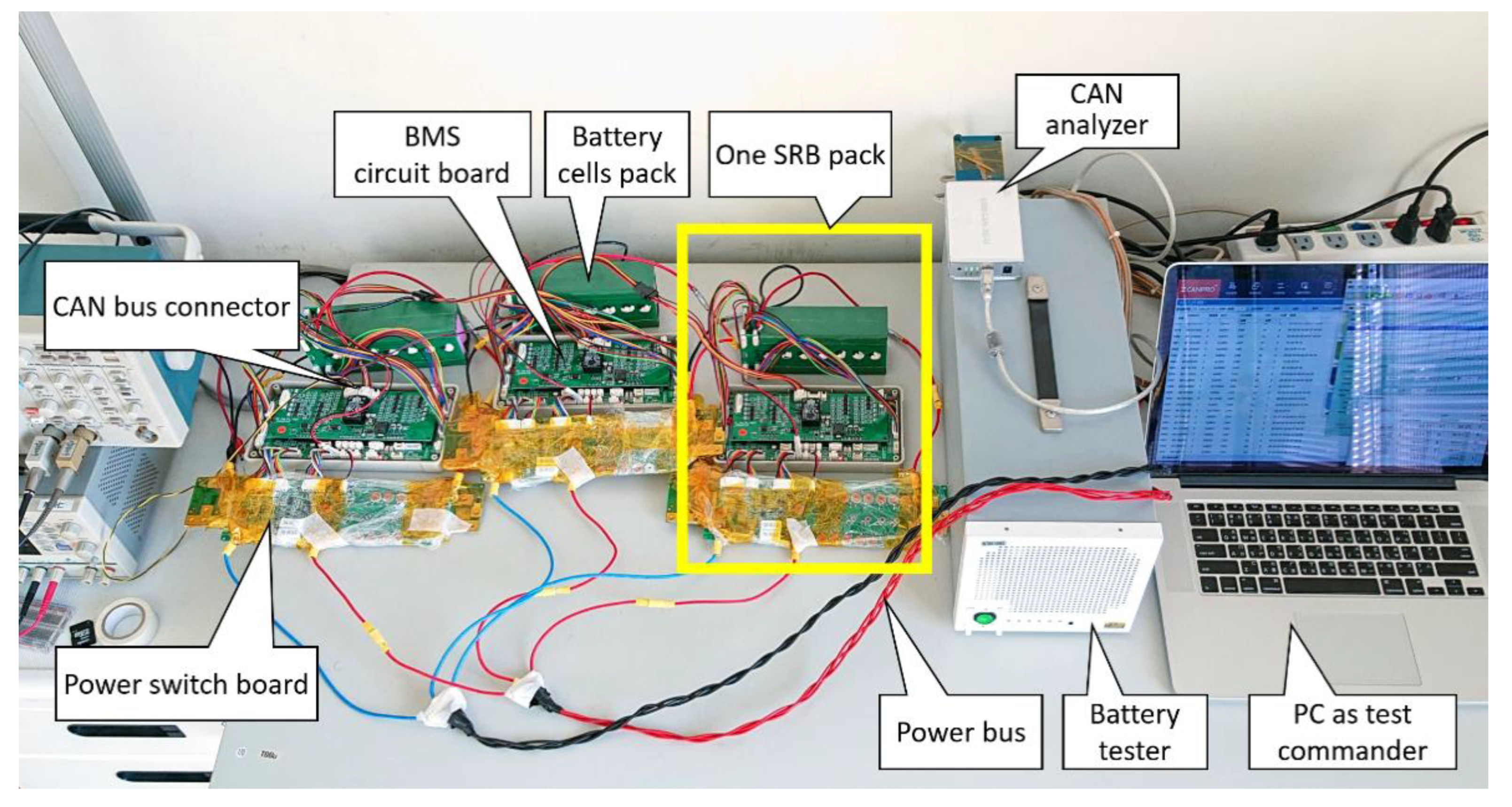
3.1. Experimental Setup
3.2. Results and Discussions on the Charging Experiment
- (1)
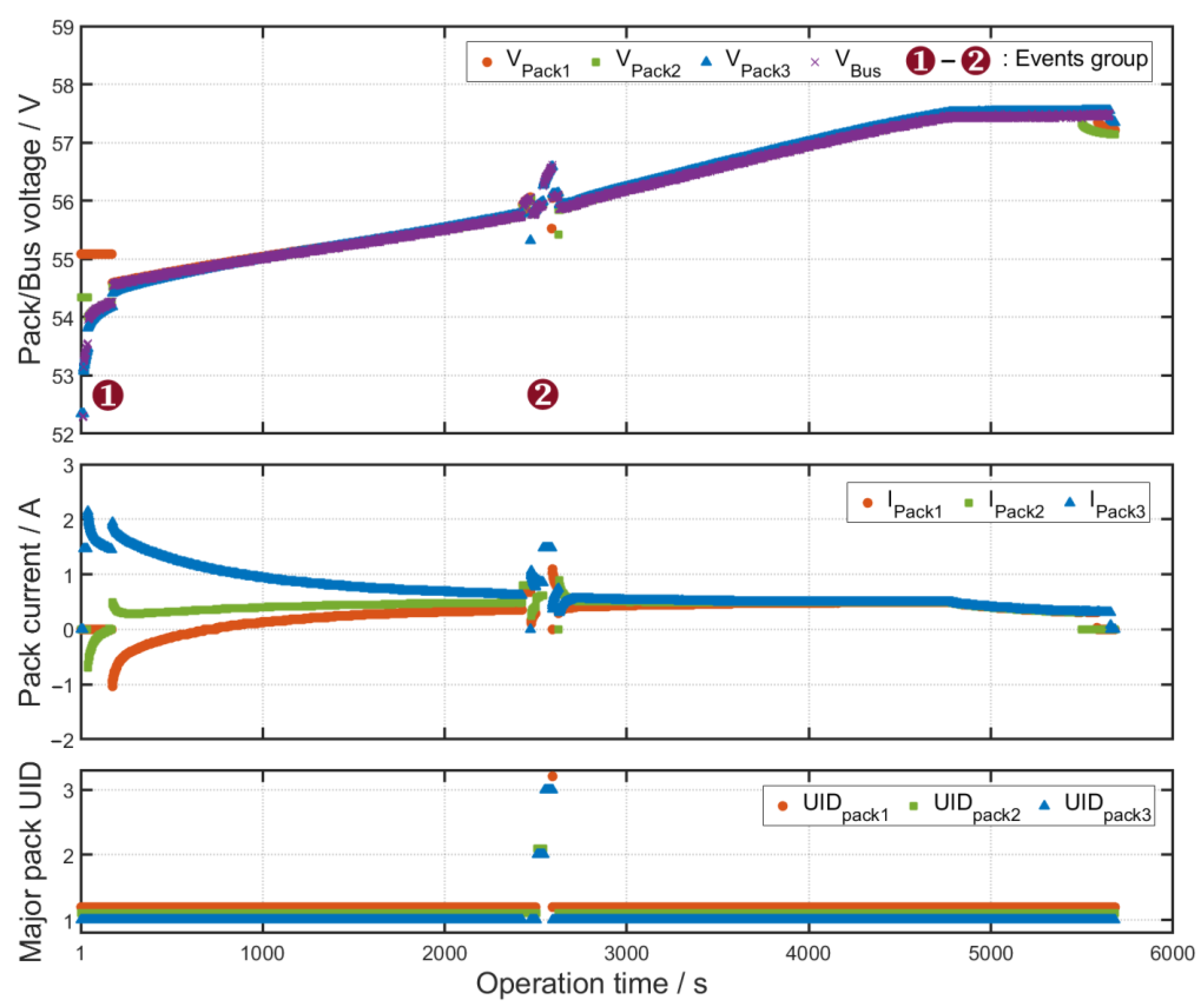
- Removed Pack3 at 2428 s. The charging current shared by Pack1 and Pack2 increased, and the voltages of both packs also increased. Since Pack3 is not the major, its removal did not affect the major assignment in the battery power network.
- (2)
- Inserted Pack3 at 2473 s. Because the OCV of Pack3 was within the safe mounting voltage range, Pack3 was mounted right after insertion. After Pack3 got mounted, the charging currents of Pack1 and Pack2 decreased and so do their voltages. Because the present major Pack1 still had the lowest UID number, its role remained unchanged.
- (3)
- Removed Pack1 at 2503 s. The charging currents and voltages of both Pack2 and Pack3 increased to take up Pack1’s vacated capacity. Because the major of the battery power network was removed, Pack2, which had then the lowest UID number, assumed the role of major.
- (4)
- Removed Pack2 at 2543 s. Pack3 accepted 1.5 A of charging current, which increased the voltage further. The battery power network lost the major again, and Pack3, which had then the lowest UID number, assumed the role of major.
- (5)
- Inserted Pack1 at 2590 s. Because the OCV of Pack1 was within the safe mounting voltage range, it got mounted right after insertion. Subsequently, because Pack1 shared the charging current, the current and voltage of Pack3 decreased. In addition, Pack3 relinquished its role as major because it no longer had the lowest UID number; Pack1, which now had the lowest UID number, assumed the role of major.
- (6)
- Inserted Pack2 at 2626 s. Because the OCV of Pack2 was within the safe mounting voltage range, it got mounted after insertion. Pack2 shared the charging current after being mounted, and both the voltages and currents of Pack1 and Pack3 decreased. Because the current major Pack1 still had the lowest UID number, it retained its role as the major.
3.3. Results and Discussions on the Discharging Experiment
- (1)
- Removed Pack2 at 1713 s. The loading current of Pack2 got shared by Pack1 and Pack3 causing the discharge currents of both packs to increase and the voltages to decrease. Since Pack2 was not the major, its removal did not affect the major assignment in the battery power network.
- (2)
- Removed Pack1 at 1756 s. Pack3 had provided 1.5 A of discharge current; hence, the bus voltage dropped is even lower. Moreover, the battery power network lost the major, and thus Pack3, which had then the lowest UID number, assumed the role of major.
- (3)
- Inserted Pack2 at 1801 s. Because the OCV of Pack2 was within the safe mounting voltage range, it got mounted right after insertion. Subsequently, because Pack2 joined to share the discharge current, the discharge current of Pack3 decreased and its voltage increased. Moreover, Pack3 relinquished its role as the major because it was no longer the pack with the lowest UID number; subsequently, Pack2, which had then the lowest UID number, assumed the role of major.
- (4)
- Removed Pack3 at 1831 s. Pack2 picked up the load burden carried by Pack3 to provide 1.5 A of discharge current, so its voltage dropped. Because Pack3 was not the major, its leave did not affect the major assignment in the battery power network.
- (5)
- Inserted Pack1 at 1878 s. Because the OCV of Pack1 was within the safe mounting voltage range, the pack was mounted right after the insertion. Subsequently, because Pack1 joined to share the discharge current, the discharge current of Pack2 decreased, and its voltage increased. Moreover, Pack2 relinquished its role of major because it no longer had the lowest UID number, and Pack1, which had then the lowest UID number, assumed the role of major.
- (6)
- Inserted Pack3 at 1915 s. Because the OCV of Pack3 was within the safe mounting voltage range, it was mounted right after insertion. After the mount, Pack3 picked up its share of the discharge current, and the discharge currents of Pack1 and Pack2 decreased and their voltages increased. Since the original major Pack1 still had the lowest UID number, it retained its role as major.
3.4. Power Loss and Efficiency
3.5. Summary
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BCC | battery charging controller |
| BMS | battery management system |
| CAN | controller area network |
| CC | control current |
| CV | control voltage |
| DC/DC | direct current to direct current |
| ECU | electronic control unit |
| LDMT | leading mount threshold |
| LGMT | lagging mount threshold |
| OCV | open-circuit voltage |
| PMT | pack member table |
| SRB | smart redundant battery |
| UID | unique serial identification |
References
- Pielecha, J.; Skobiej, K.; Kurtyka, K. Exhaust Emissions and Energy Consumption Analysis of Conventional, Hybrid, and Electric Vehicles in Real Driving Cycles. Energies 2020, 13, 6423. [Google Scholar] [CrossRef]
- Woodcock, J.; Edwards, P.; Tonne, C.; Armstrong, B.G.; Ashiru, O.; Banister, D.; Beevers, S.; Chalabi, Z.; Chowdhury, Z.; Cohen, A.; et al. Public health benefits of strategies to reduce greenhouse-gas emissions: Urban land transport. Lancet 2009, 374, 1930–1943. [Google Scholar] [CrossRef]
- Rode, P.; Floater, G.; Thomopoulos, N.; Docherty, J.; Schwinger, P.; Mahendra, A.; Fang, W. Accessibility in cities: Transport and urban form. In Disrupting Mobility; Springer International Publishing: Cham, Switzerland, 2017; pp. 239–273. [Google Scholar] [CrossRef]
- Aftabuzzaman, M.; Mazloumi, E. Achieving sustainable urban transport mobility in post peak oil era. Transp. Policy 2011, 18, 695–702. [Google Scholar] [CrossRef]
- Brenna, M.; Bucci, V.; Falvo, M.C.; Foiadelli, F.; Ruvio, A.; Sulligoi, G.; Vicenzutti, A. A review on energy efficiency in three transportation sectors: Railways, electrical vehicles and marine. Energies 2020, 13, 2378. [Google Scholar] [CrossRef]
- Adheesh, S.; Vasisht, M.S.; Ramasesha, S.K. Air-pollution and economics: Diesel bus versus electric bus. Curr. Sci. 2016, 110, 858–862. [Google Scholar]
- Topal, O.; Nakir, İ. Total Cost of Ownership Based Economic Analysis of Diesel, CNG and Electric Bus Concepts for the Public Transport in Istanbul City. Energies 2018, 11, 2369. [Google Scholar] [CrossRef]
- Lu, L.; Han, X.; Li, J.; Hua, J.; Ouyang, M. A review on the key issues for lithium-ion battery management in electric vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Gao, Z.; Lin, Z.; LaClair, T.J.; Liu, C.; Li, J.M.; Birky, A.K.; Ward, J. Battery capacity and recharging needs for electric buses in city transit service. Energy 2017, 122, 588–600. [Google Scholar] [CrossRef]
- Li, J.Q. Battery-electric transit bus developments and operations: A review. Int. J. Sustain. Transp. 2014, 10, 157–169. [Google Scholar] [CrossRef]
- Rogge, M.; Wollny, S.; Sauer, D.U. Fast charging battery buses for the electrification of urban public transport—A feasibility study focusing on charging infrastructure and energy storage requirements. Energies 2015, 8, 4587–4606. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, G. Optimal dispatch of electric vehicle batteries between battery swapping stations and charging stations. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Zheng, Y.; Dong, Z.Y.; Xu, Y.; Meng, K.; Zhao, J.H.; Qiu, J. Electric Vehicle Battery Charging/Swap Stations in Distribution Systems: Comparison Study and Optimal Planning. IEEE Trans. Power Syst. 2014, 29, 221–229. [Google Scholar] [CrossRef]
- An, K.; Jing, W.; Kim, I. Battery-swapping facility planning for electric buses with local charging systems. Int. J. Sustain. Transp. 2019, 14, 489–502. [Google Scholar] [CrossRef]
- Wu, T.H.; Pang, G.K.; Choy, K.; Lam, H. An optimization model for a battery swapping station in Hong Kong. In Proceedings of the 2015 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 14–17 June 2015; pp. 1–6. [Google Scholar]
- Moon, J.; Kim, Y.J.; Cheong, T.; Song, S.H. Locating battery swapping stations for a smart e-bus system. Sustainability 2020, 12, 1142. [Google Scholar] [CrossRef]
- Choi, W.; Kim, J. Electrification of public transportation: Battery swappable smart electric bus with battery swapping station. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–8. [Google Scholar]
- Shen, H.; Wang, X.; Wang, J.; Xie, Y.; Wang, W. Vision based battery exchange robots for electric vehicle. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 2472–2476. [Google Scholar]
- Cheng, Y.; Tao, J. Optimization of A Micro Energy Network Integrated with Electric Bus Battery Swapping Station and Distributed PV. In Proceedings of the 2018 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018; pp. 1–6. [Google Scholar]
- Hemmati, M.; Abapour, M.; Mohammadi-ivatloo, B. Optimal Scheduling of Smart Microgrid in Presence of Battery Swapping Station of Electrical Vehicles. In Electric Vehicles in Energy Systems: Modelling, Integration, Analysis, and Optimization; Ahmadian, A., Mohammadi-ivatloo, B., Elkamel, A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 249–267. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, J.; Sun, Z.; Wang, L.; Xu, R.; Li, M.; Chen, Z. A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems. Renew. Sustain. Energy Rev. 2020, 131, 110015. [Google Scholar] [CrossRef]
- Gabbar, H.A.; Othman, A.M.; Abdussami, M.R. Review of Battery Management Systems (BMS) Development and Industrial Standards. Technologies 2021, 9, 28. [Google Scholar] [CrossRef]
- Rahimi-Eichi, H.; Ojha, U.; Baronti, F.; Chow, M.Y. Battery management system: An overview of its application in the smart grid and electric vehicles. IEEE Ind. Electron. Mag. 2013, 7, 4–16. [Google Scholar] [CrossRef]
- Lawder, M.T.; Suthar, B.; Northrop, P.W.; De, S.; Hoff, C.M.; Leitermann, O.; Crow, M.L.; Santhanagopalan, S.; Subramanian, V.R. Battery energy storage system (BESS) and battery management system (BMS) for grid-scale applications. Proc. IEEE 2014, 102, 1014–1030. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Cao, J.; Schofield, N.; Emadi, A. Battery balancing methods: A comprehensive review. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–6. [Google Scholar]
- Lim, D.; Anbuky, A. A distributed industrial battery management network. IEEE Trans. Ind. Electron. 2004, 51, 1181–1193. [Google Scholar] [CrossRef]
- Moo, C.S.; Ng, K.S.; Hsieh, Y.C. Parallel Operation of Battery Power Modules. IEEE Trans. Energy Convers. 2008, 23, 701–707. [Google Scholar]
- Zhang, Y.; Zhao, R.; Dubie, J.; Jahns, T.; Juang, L. Investigation of current sharing and heat dissipation in parallel-connected lithium-ion battery packs. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Li, Y.; Han, Y. A module-integrated distributed battery energy storage and management system. IEEE Trans. Power Electron. 2016, 31, 8260–8270. [Google Scholar] [CrossRef]
- Lin, K.H.; Yu, L.R.; Moo, C.S.; Juan, C.Y. Analysis on parallel operation of boost-type battery power modules. In Proceedings of the 2013 IEEE 10th International Conference on Power Electronics and Drive Systems (PEDS), Kitakyushu, Japan, 22–25 April 2013; pp. 809–813. [Google Scholar]
- Stroe, D.I.; Swierczynski, M.; Kær, S.K.; Teodorescu, R. Degradation behavior of lithium-ion batteries during calendar ageing—The case of the internal resistance increase. IEEE Trans. Ind. Appl. 2017, 54, 517–525. [Google Scholar] [CrossRef]
- Piłatowicz, G.; Marongiu, A.; Drillkens, J.; Sinhuber, P.; Sauer, D.U. A critical overview of definitions and determination techniques of the internal resistance using lithium-ion, lead-acid, nickel metal-hydride batteries and electrochemical double-layer capacitors as examples. J. Power Sources 2015, 296, 365–376. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J. Inrush current estimation and hot-swapping for safe parallel battery pack. Int. J. Electron. 2020, 107, 1609–1624. [Google Scholar] [CrossRef]
- Hsu, C.T.; Sheng, S.; Sun, Q.; Li, P.; Lehman, B. Increased energy delivery for parallel battery packs with no regulated bus. In Proceedings of the Intelec 2012, Scottsdale, AZ, USA, 30 September–4 October 2012; pp. 1–8. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| slot-1 | slot-2 | … | slot-i | … | slot-N | |
|---|---|---|---|---|---|---|
| Slot number | 1 | 2 | i | N | ||
| UID number | 5 | 21 | 7 | 2 | ||
| 48.02 | 50.16 | 49.57 | 51.09 | |||
| 1.12 | 0 | 0 | 0 | |||
| 48.01 | 48.03 | 47.99 | 48.00 | |||
| Mounting state | 1 | 0 | 0 | 0 |
| Charging Experiment | |||||
| Time (s) | 176–425 (250 s) | 426–675 (250 s) | 676–925 (250 s) | 926–1175 (250 s) | overall (1000 s) |
| Net output energy (J) | −19,917.6 | −20,079.3 | −20,196.6 | −20,088.1 | −80,281.6 |
| in direct connection (J) | 411.9 | 250 | 185.7 | 152.5 | 1000.1 |
| in equal load sharing (J) | 106.8 | 107.7 | 108.3 | 106.6 | 429.4 |
| Equivalent DC/DC efficiency (%) | 98.47 | 99.29 | 99.62 | 99.77 | 99.29 |
| Discharging Experiment | |||||
| Time (s) | 276–525 (250 s) | 526–775 (250 s) | 776–1025 (250 s) | 1026–1275 (250 s) | overall (1000 s) |
| Net output energy (J) | 20,008.7 | 19,754.5 | 19,765.7 | 19,785.6 | 79,314.5 |
| in direct connection (J) | 449.5 | 257.3 | 186.3 | 152.2 | 1045.3 |
| in equal load sharing (J) | 116.1 | 114.1 | 115.2 | 116.3 | 461.7 |
| Equivalent DC/DC efficiency (%) | 98.33 | 99.28 | 99.64 | 99.82 | 99.26 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chou, C.-J.; Jiang, S.-B.; Yeh, T.-L.; Sun, C.-C. Fault-Tolerant Battery Power Network Architecture of Networked Swappable Battery Packs in Parallel. Energies 2021, 14, 2841. https://doi.org/10.3390/en14102841
Chou C-J, Jiang S-B, Yeh T-L, Sun C-C. Fault-Tolerant Battery Power Network Architecture of Networked Swappable Battery Packs in Parallel. Energies. 2021; 14(10):2841. https://doi.org/10.3390/en14102841
Chicago/Turabian StyleChou, Chung-Jen, Shyh-Biau Jiang, Tse-Liang Yeh, and Chein-Chung Sun. 2021. "Fault-Tolerant Battery Power Network Architecture of Networked Swappable Battery Packs in Parallel" Energies 14, no. 10: 2841. https://doi.org/10.3390/en14102841
APA StyleChou, C.-J., Jiang, S.-B., Yeh, T.-L., & Sun, C.-C. (2021). Fault-Tolerant Battery Power Network Architecture of Networked Swappable Battery Packs in Parallel. Energies, 14(10), 2841. https://doi.org/10.3390/en14102841