Analysis of the Converter Synchronizing Method for the Contribution of Battery Energy Storage Systems to Inertia Emulation

 ,
,  ,
,  and
and
Abstract
1.Introduction
- Review and categorization of IE control systems according to their synchronizing method: The review of IE control systems presented in Section 2 presents a classification in two groups according to whether they use a PLL or a power-balance-based synchronization.
- Discrete-time implementations of both PLL- and VSM-based IE control systems with equivalent parameters: To study the effect of the synchronization method on the resulting emulated inertial response, representative solutions of both PLL-based and power-balance-based IE control systems were modeled with equivalent emulated inertia characteristics, as shown in Section 3.
- Analysis of the IE response provided by solutions both with and without the use of a PLL: The results presented in Section 4 show that, despite the equivalent settings, the effect of PLL-based and power-balance-based IE solutions was different in the first moments following a power imbalance.
2. Inertia Emulation Using BESSs: A Concise Review
2.1.Solutions Based on PLL Synchronization
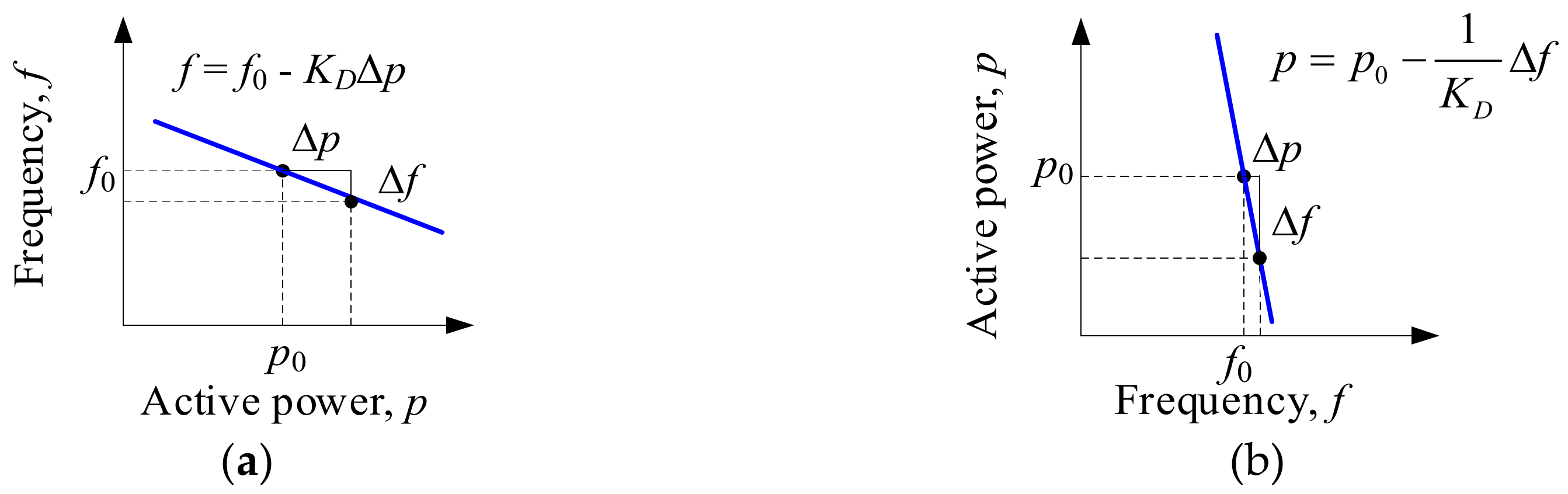
2.2.Virtual Synchronous Machines
3.Synchronizing Method and IE: Implementation
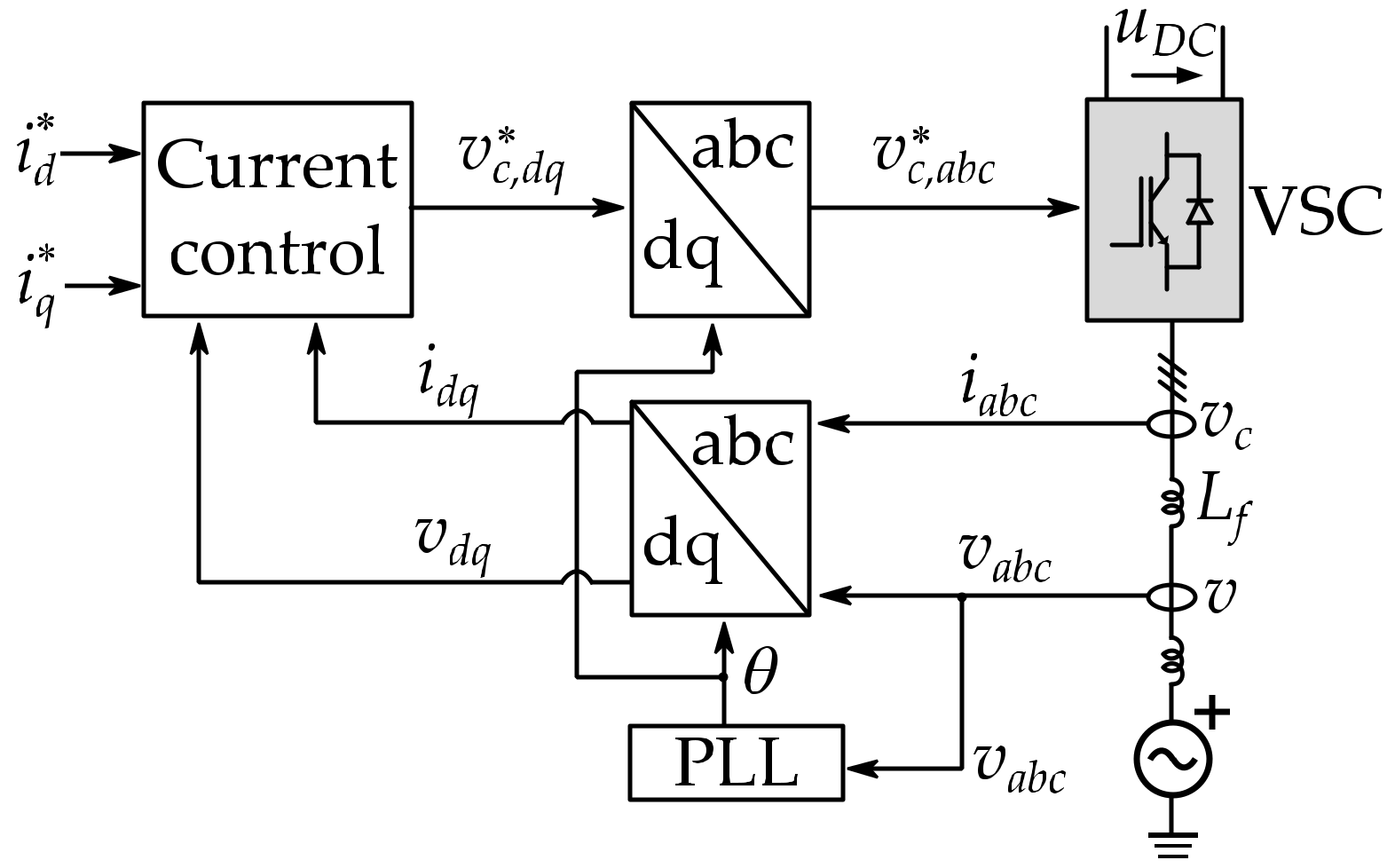
3.1.Voltage-Oriented Control (VOC)
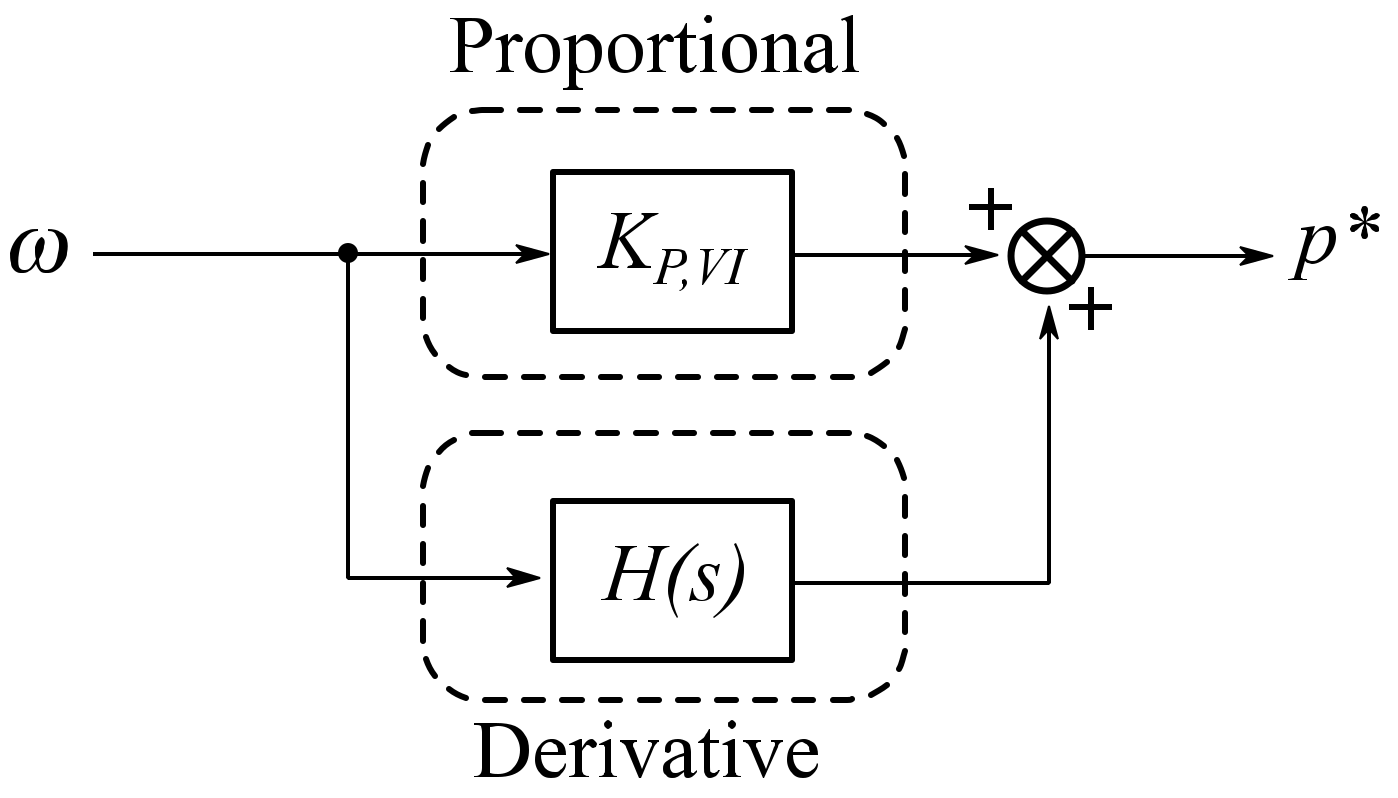
3.2.Virtual Inertia (VI)
3.3.Virtual Synchronous Machine (VSM)
4.Results and Discussion
4.1.Test System
4.2.Simulation Parameters
4.2.1.VOC Parameters
4.2.2.VSM Parameters
4.2.3.VI parameters
4.3.Simulation Results
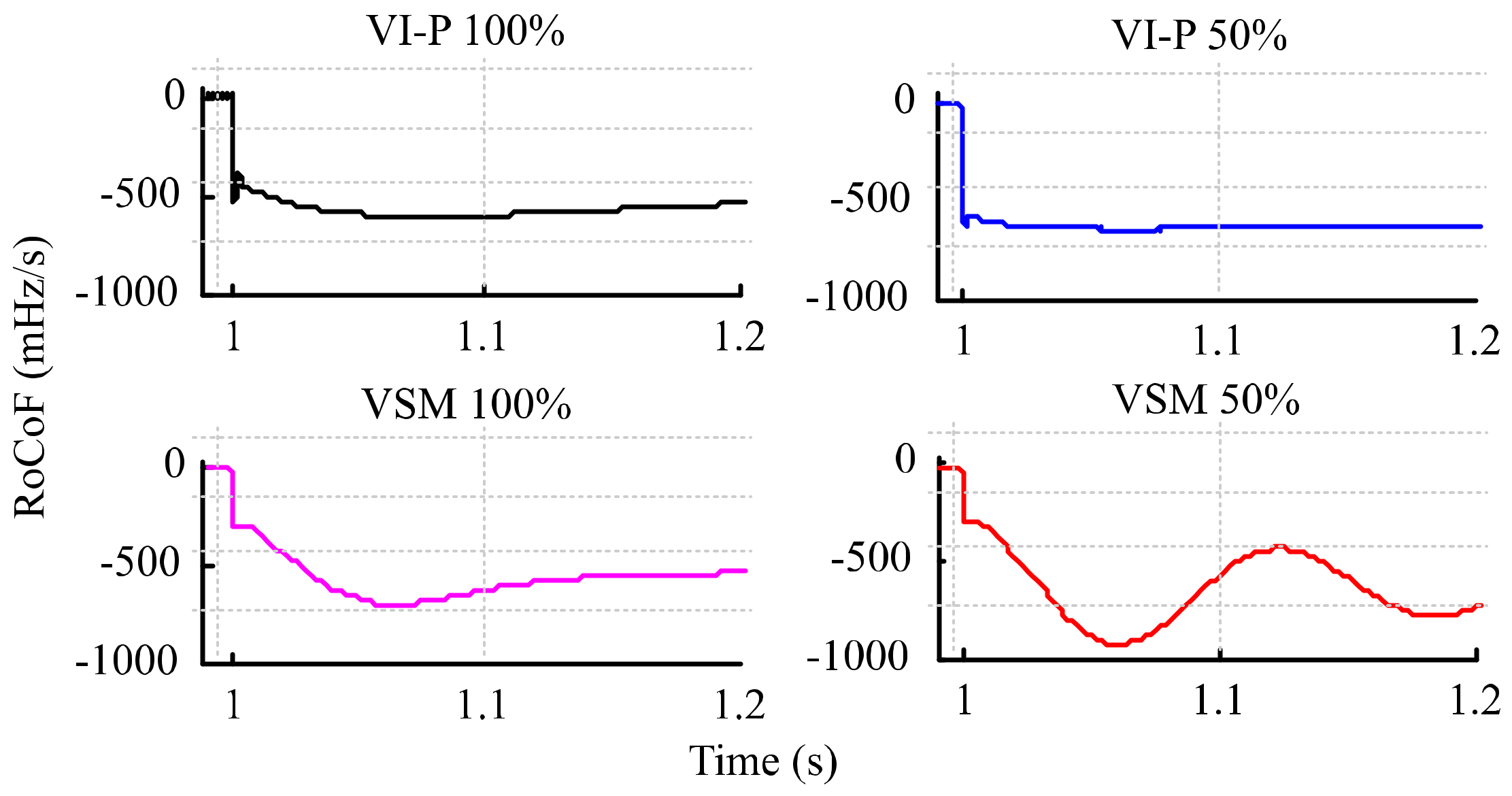
4.3.1.Response to Load Variation
4.3.2.Sensitivity to the Steady-State Relation between the Active Power and Frequency
5.Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gonzalez-Longatt, F.; Chikuni, E.; Rashayi, E. Effects of the Synthetic Inertia from Wind Power on the Total System Inertia After a Frequency Disturbance. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; pp. 826–832. [Google Scholar]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.; Hansen, T.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Chauhan, R.K.; Rajpurohit, B.S.; Hebner, R.E.; Singh, S.N.; Longatt, F.M.G. Design and Analysis of PID and Fuzzy-PID Controller for Voltage Control of DC Microgrid. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies—Asia, ISGT ASIA 2015, Bangkok, Thailand, 3–6 November 2015. [Google Scholar]
- Amirnaser, Y.; Reza, I. Voltage-Sourced Converters in Power Systems: Modeling, Control, and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Egea-Alvarez, A.; Fekriasl, S.; Hassan, F.; Gomis-Bellmunt, O. Advanced Vector Control for Voltage Source Converters Connected to Weak Grids. IEEE Trans. Power Syst. 2015, 30, 3072–3081. [Google Scholar] [CrossRef]
- Svensson, J. Synchronisation methods for grid-connected voltage source converters. IEE Proc.-Gener. Transm. Distrib. 2001, 148, 229. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A. Equivalence of virtual synchronous machines and frequency-droops for converter-based Microgrids. IEEE Trans. Smart Grid 2014, 5, 394–395. [Google Scholar] [CrossRef]
- Suul, J.A.; D’Arco, S.; Guidi, G. Virtual Synchronous Machine-Based Control of a Single-Phase Bi-Directional Battery Charger for Providing Vehicle-to-Grid Services. IEEE Trans. Ind. Appl. 2016, 52, 3234–3244. [Google Scholar] [CrossRef]
- Wang, D.; Meng, K.; Gao, X.; Qiu, J.; Lai, L.L.; Dong, Z.Y. Coordinated Dispatch of Virtual Energy Storage Systems in LV Grids for Voltage Regulation. IEEE Trans. Ind. Inform. 2018, 14, 2452–2462. [Google Scholar] [CrossRef]
- Lai, C.S.; McCulloch, M.D. Levelized cost of electricity for solar photovoltaic and electrical energy storage. Appl. Energy 2017, 190, 191–203. [Google Scholar] [CrossRef]
- National Grid Electrical Sytem Operator. Operability Strategy Report; National Grid Electrical Sytem Operator: Warwick, UK, 2018. [Google Scholar]
- Breithaupt, T.; Tuinema, B.; Herwig, D.; Wang, D.; Hofmann, L.; Rueda Torres, J.; Mertens, A.; Rüberg, S.; Meyer, R.; Sewdien, V.; et al. MIGRATE Deliverable D1.1-Report on Systemic Issues; MIGRATE Project Consortium: Bayreuth, Germany, 2016; p. 137. [Google Scholar]
- D’Arco, S.; Suul, J.A. Virtual Synchronous Machines—Classification of Implementations and Analysis of Equivalence to Droop Controllers for Microgrids. In Proceedings of the 2013 IEEE Grenoble Conference PowerTech, POWERTECH 2013, Grenoble, France, 16–20 June 2013; pp. 1–7. [Google Scholar]
- Mo, O.; D’Arco, S.; Suul, J.A. Evaluation of Virtual Synchronous Machines with Dynamic or Quasi-Stationary Machine Models. IEEE Trans. Ind. Electron. 2016, 64, 5952–5962. [Google Scholar] [CrossRef]
- Kottick, D.; Blau, M.; Edelstein, D. Battery Energy Storage for Frequency Regulation in an Island Power System. IEEE Trans. Energy Convers. 1993, 8, 455–459. [Google Scholar] [CrossRef]
- Morren, J.; de Haan, S.W.H.; Kling, W.L.; Ferreira, J.A. Wind turbines emulating inertia and supporting primary frequency control. IEEE Trans. Power Syst. 2006, 21, 433–434. [Google Scholar] [CrossRef]
- Mauricio, J.M.; Marano, A.; Gomez-Exposito, A.; Martinez Ramos, J.L. Frequency Regulation Contribution Through Variable-Speed Wind Energy Conversion Systems. IEEE Trans. Power Syst. 2009, 24, 173–180. [Google Scholar] [CrossRef]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994; Volume 7. [Google Scholar]
- Sun, Y.; Zhang, Z.; Li, G.; Lin, J. Review on Frequency Control of Power Systems with Wind Power Penetration. In Proceedings of the 2010 International Conference on Power System Technology, Hangzhou, China, 24–28 October 2010; pp. 1–8. [Google Scholar]
- Ma, J.; Qiu, Y.; Li, Y.; Zhang, W.; Song, Z.; Thorp, J.S. Research on the impact of DFIG virtual inertia control on power system small-signal stability considering the phase-locked loop. IEEE Trans. Power Syst. 2017, 32, 2094–2105. [Google Scholar] [CrossRef]
- Beck, H.; Hesse, R. Virtual Synchronous Machine. In Proceedings of the 2007 9th International Conference on Electrical Power Quality and Utilisation, EPQU, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Nguyen, L.; Ma, Z.; Sheng, W. Self-synchronized synchronverters: Inverters without a dedicated synchronization unit. IEEE Trans. Power Electron. 2014, 29, 617–630. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H. Power-synchronization control of grid-connected voltage-source converters. IEEE Trans. Power Syst. 2010, 25, 809–820. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.L.; Loh, C. Advanced control architectures for intelligent microgrids. Part I: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar]
- Zhong, Q.C. Robust droop controller for accurate proportional load sharing among inverters operated in parallel. IEEE Trans. Ind. Electron. 2013, 60, 1281–1290. [Google Scholar] [CrossRef]
- Yu, M.; Roscoe, A.J.; Booth, C.D.; Dysko, A.; Ierna, R.; Zhu, J.; Urdal, H. Use of an Inertia-Less Virtual Synchronous Machine within Future Power Networks with High Penetrations of Converters. In Proceedings of the 19th Power Systems Computation Conference, PSCC 2016, Genoa, Italy, 20–24 June 2016; pp. 1–7. [Google Scholar]
- Chandorkar, M.C.; Divan, D.M.; Adapa, R. Control of parallel connected inverters in standalone ac supply systems. IEEE Trans. Ind. Appl. 1993, 29, 136–143. [Google Scholar] [CrossRef]
- Aouini, R.; Marinescu, B.; Kilani, K.B.; Elleuch, M. Synchronverter-Based Emulation and Control of HVDC Transmission. IEEE Trans. Power Syst. 2016, 31, 278–286. [Google Scholar] [CrossRef]
- Pradhan, C.; Bhende, C.N.; Samanta, A.K. Adaptive virtual inertia-based frequency regulation in wind power systems. Renew. Energy 2018, 115, 558–574. [Google Scholar] [CrossRef]
- Keung, P.K.; Li, P.; Banakar, H.; Ooi, B.T. Kinetic energy of wind-turbine generators for system frequency support. IEEE Trans. Power Syst. 2009, 24, 279–287. [Google Scholar] [CrossRef]
- Delille, G.; François, B.; Malarange, G. Dynamic frequency control support by energy storage to reduce the impact of wind and solar generation on isolated power system’s inertia. IEEE Trans. Sustain. Energy 2012, 3, 931–939. [Google Scholar] [CrossRef]
- Ortega, Á.; Milano, F. Comparison of Different PLL Implementations for Frequency Estimation and Control. In Proceedings of the 2018 18th International Conference on Harmonics and Quality of Power (ICHQP), Ljubljana, Slovenia, 13–16 May 2018; pp. 1–6. [Google Scholar]
- Van de Vyver, J.; De Kooning, J.D.; Meersman, B.; Vandevelde, L.; Vandoorn, T.L. Droop Control as an Alternative Inertial Response Strategy for the Synthetic Inertia on Wind Turbines. IEEE Trans. Power Syst. 2016, 31, 1129–1138. [Google Scholar] [CrossRef]
- Arani, M.F.M.; El-Saadany, E.F. Implementing virtual inertia in DFIG-based wind power generation. IEEE Trans. Power Syst. 2013, 28, 1373–1384. [Google Scholar] [CrossRef]
- Roldán-Pérez, J.; Prodanovic, M.; Rodríguez-Cabero, A. Detailed Discrete-Time Implementation of a Battery-Supported Synchronverter for Weak Grids. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 1083–1088. [Google Scholar]
- Demello, F.P.; Koessler, R.J.; Agee, J.; Anderson, P.M.; Doudna, J.H.; Fish, J.H.; Hamm, P.A.L.; Kundur, P.; Lee, D.C.; Rogers, G.J.; et al. Hydraulic-Turbine and Turbine Control-Models for System Dynamic Studies. IEEE Trans. Power Syst. 1992, 7, 167–179. [Google Scholar]
- Kodama, H.; Sugiyama, T.; Morimoto, Y.; Oya, Y.; Okuno, K.; Inoue, N.; Sagara, A.; Noda, N. Thermal Annealing Effects on Chemical States of Deuterium Implanted into Boron Coating Film; McGraw-Hill: New York, NY, USA, 2003; pp. 313–316. [Google Scholar]
- Chung, S.-K. A phase tracking system for three phase utility interface inverters. IEEE Trans. Power Electron. 2000, 15, 431–438. [Google Scholar] [CrossRef]
- Wu, H.; Ruan, X.; Yang, D.; Chen, X.; Zhao, W.; Lv, Z.; Zhong, Q.C. Small-signal modeling and parameters design for virtual synchronous generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]
- Shi, K.; Ye, H.; Song, W.; Zhou, G. Virtual Inertia Control Strategy in Microgrid Based on Virtual Synchronous Generator Technology. IEEE Access 2018, 6, 27949–27957. [Google Scholar] [CrossRef]
- ENTSO-E. Frequency Measurement Requirements and Usage; ENTSO-E: Brussels, Belgium, 2018. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Description | Value | Units |
|---|---|---|---|
| SN | Microgrid nominal power | 500 | kW |
| UN | Microgrid nominal rms line voltage | 400 | V |
| pL,0 | Initial load active power demand | 0.2 | pu |
| pSG,0 | Initial active power of the SG | 0.2 | pu |
| pBESS,0 | Initial BESS active power | 0.0 | pu |
| fN | Microgrid nominal frequency | 50 | Hz |
| tp | Sample time of the power circuit | 10 | ms |
| LG | The equivalent inductance of the connection between the SG and the load | 0.1 | pu |
| LF | Equivalent inductance of the connection between the BESS and the load | 0.2 | pu |
| RF | Equivalent resistance of the connection between the BESS and the load | 0.004 | pu |
| SSG,N | SG nominal power | 500 | kW |
| HSG | SG inertia constant | 3.70 | s |
| KD,SG | SG damping factor | 0.10 | pu |
| Label | Description | Value | Units |
|---|---|---|---|
| Ts | Controller sampling time | 100.0 | μs |
| fn,PLL | PLL natural frequency | 100.0 | Hz |
| ξPLL | PLL damping coefficient | 1/√2 | - |
| τi | Time constant of the current regulation loops | 1.0 | ms |
| Ki | Gain of the current regulation loops | RF/LF | - |
| Label | Description | Value | Units |
|---|---|---|---|
| KP,VSM | VSM active power controller gain | 5.5 | s−1 |
| DVSM | VSM damping gain | 9.0 | - |
| τQ,VSM | VSM reactive power time constant | 10 | ms |
| Label | Description | Value | Units |
|---|---|---|---|
| KP,VI | VI proportional gain | 9.0 | - |
| KD,VI | VI derivative gain | 0.2 | s |
| Indicator | VOC | Droop | VI | VSM |
|---|---|---|---|---|
| fNADIR (Hz) | 47.028 | 49.448 | 49.448 | 49.448 |
| RoCoFDt (mHz/s) | 682.96 | 609.10 | 613.35 | 700.89 |
| RoCoF500ms (mHz/s) | 666.84 | 502.31 | 494.23 | 495.74 |
| PBESS,max (pu) | 0.04 | 0,10 | 0.10 | 0.10 |
| E (pu·s) | 0.00 | 1.79 | 1.79 | 1.81 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peña Asensio, A.; Gonzalez-Longatt, F.; Arnaltes, S.; Rodríguez-Amenedo, J.L. Analysis of the Converter Synchronizing Method for the Contribution of Battery Energy Storage Systems to Inertia Emulation. Energies 2020, 13, 1478. https://doi.org/10.3390/en13061478
Peña Asensio A, Gonzalez-Longatt F, Arnaltes S, Rodríguez-Amenedo JL. Analysis of the Converter Synchronizing Method for the Contribution of Battery Energy Storage Systems to Inertia Emulation. Energies. 2020; 13(6):1478. https://doi.org/10.3390/en13061478
Chicago/Turabian StylePeña Asensio, Andrés, Francisco Gonzalez-Longatt, Santiago Arnaltes, and Jose Luis Rodríguez-Amenedo. 2020. "Analysis of the Converter Synchronizing Method for the Contribution of Battery Energy Storage Systems to Inertia Emulation" Energies 13, no. 6: 1478. https://doi.org/10.3390/en13061478
APA StylePeña Asensio, A., Gonzalez-Longatt, F., Arnaltes, S., & Rodríguez-Amenedo, J. L. (2020). Analysis of the Converter Synchronizing Method for the Contribution of Battery Energy Storage Systems to Inertia Emulation. Energies, 13(6), 1478. https://doi.org/10.3390/en13061478