Instantaneous Rotational Speed Algorithm for Locating Malfunctions in Marine Diesel Engines



Abstract
1. Introduction
2. State-of-the-Art
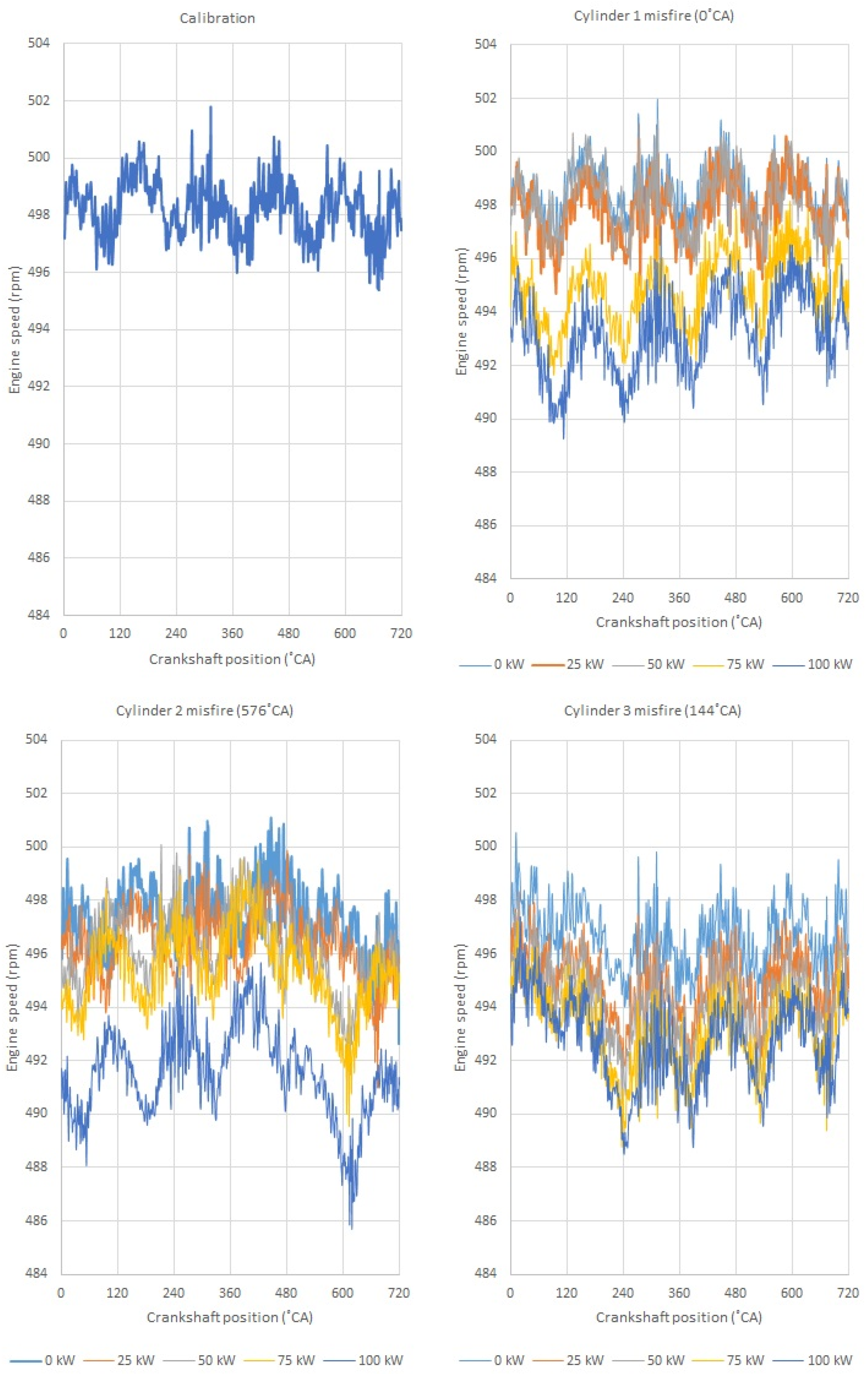
- For a steady-state (quasi-static) engine, the difference in instantaneous rotational speed compared to the average rotational speed of a specific crankshaft position and calculated for n subsequent revolutions will reflect the change in the steady-state engine condition.
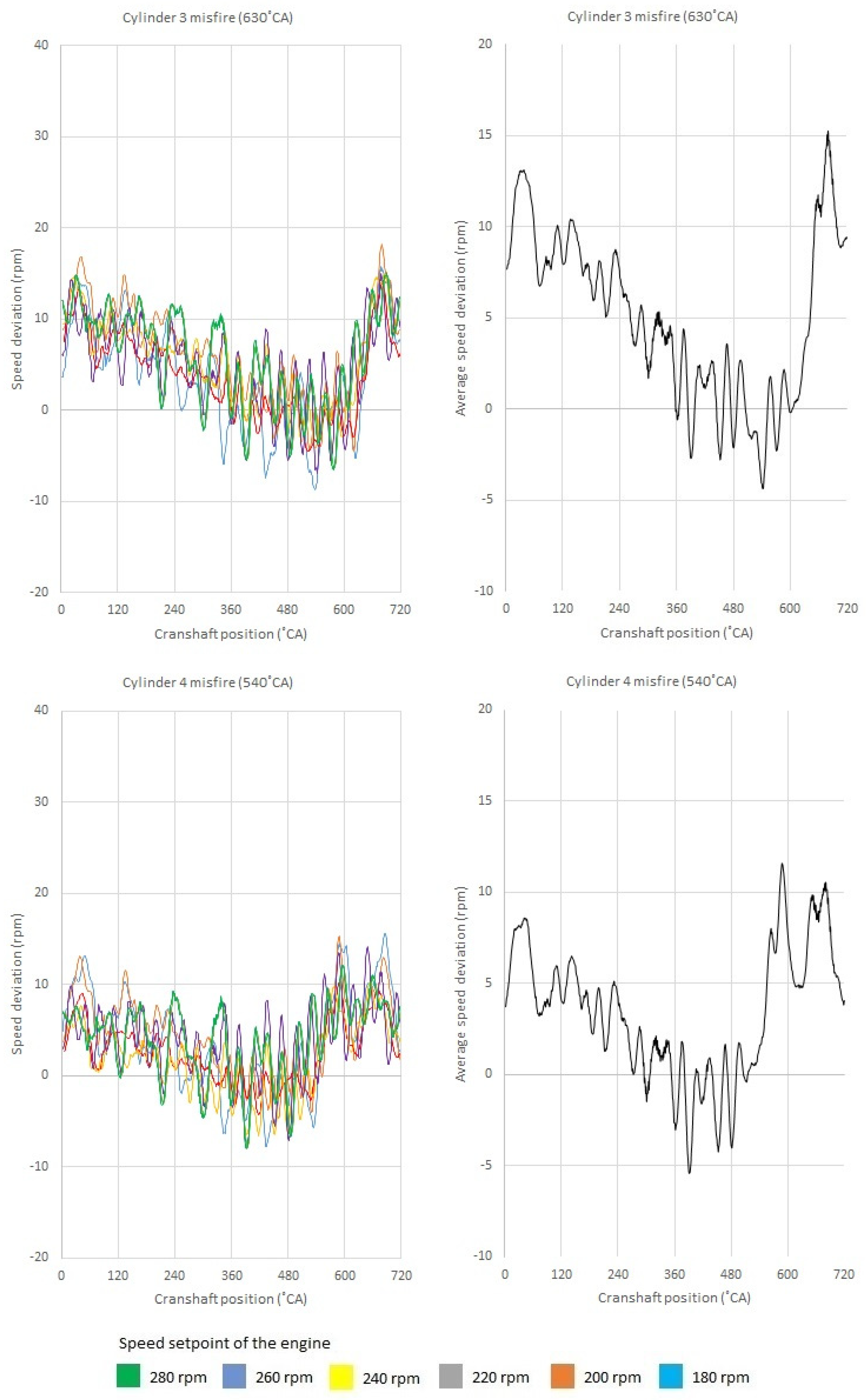
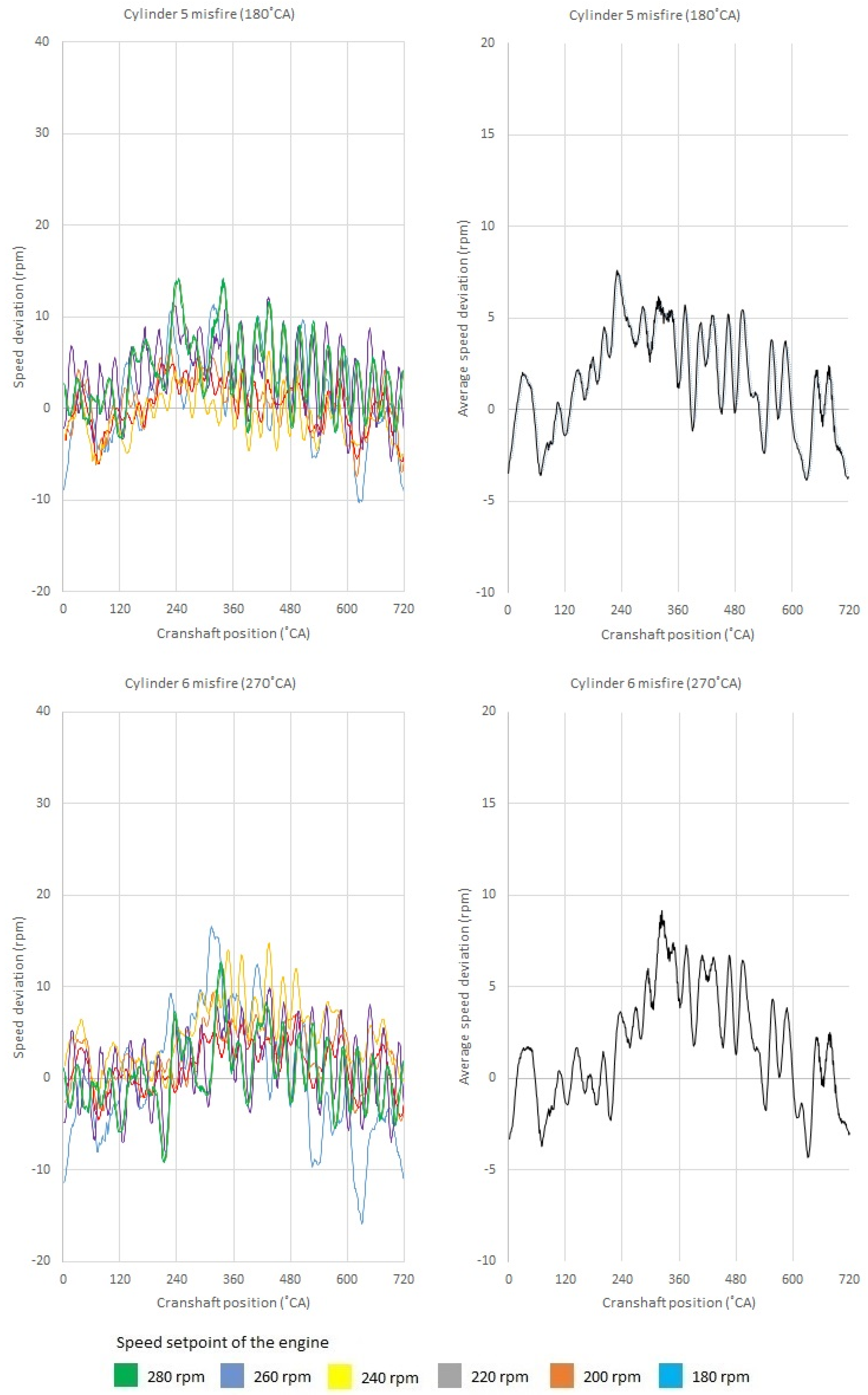
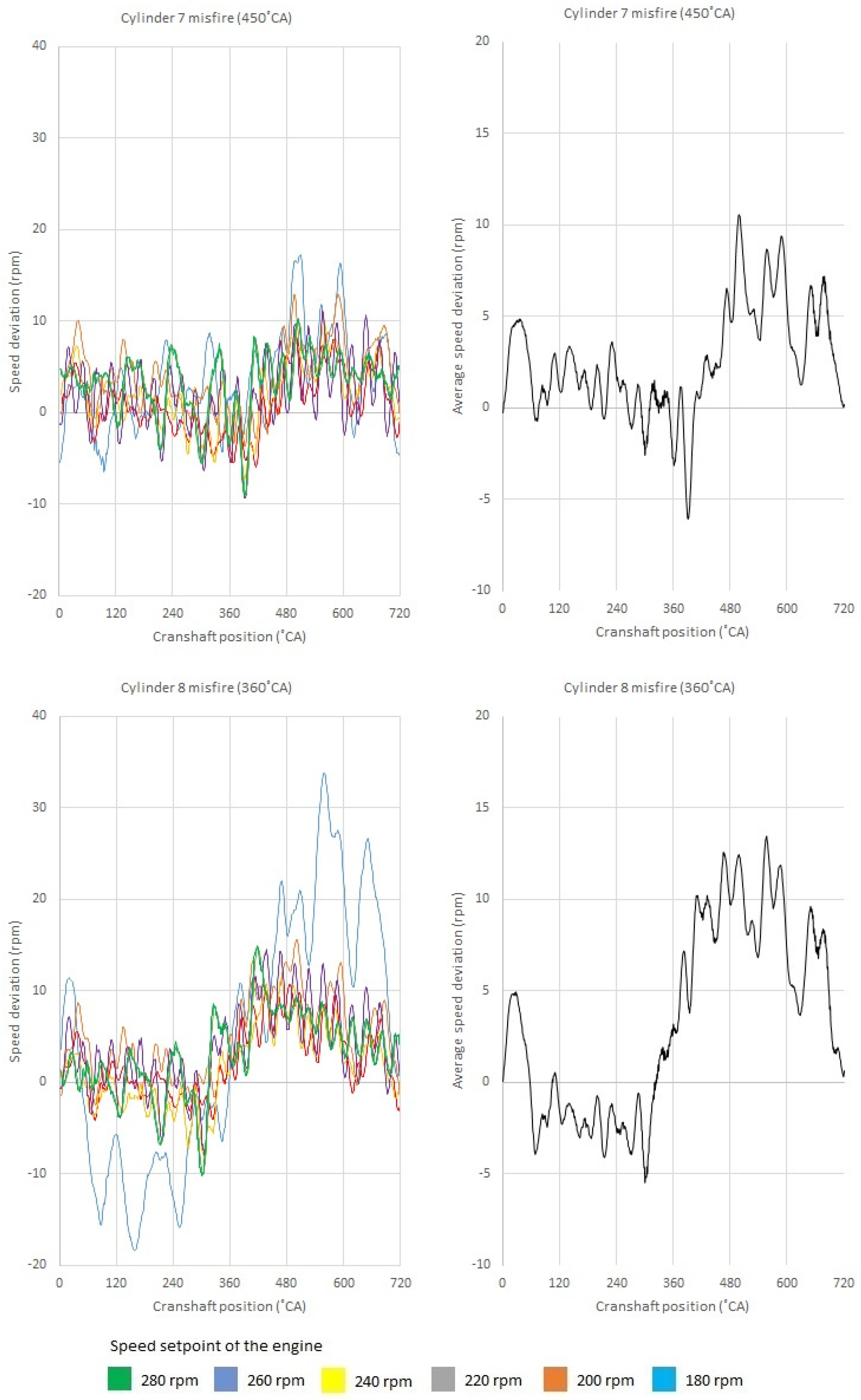
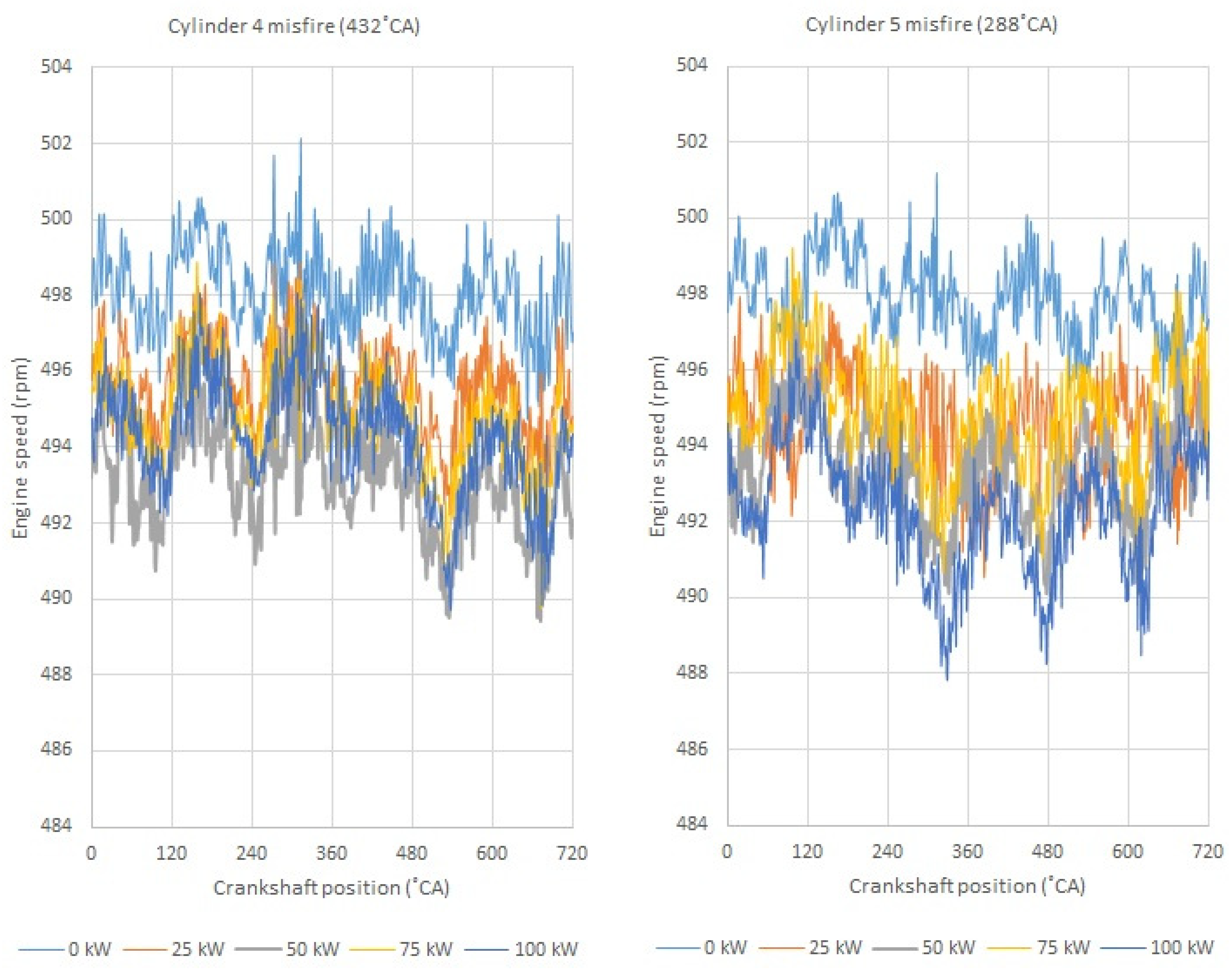
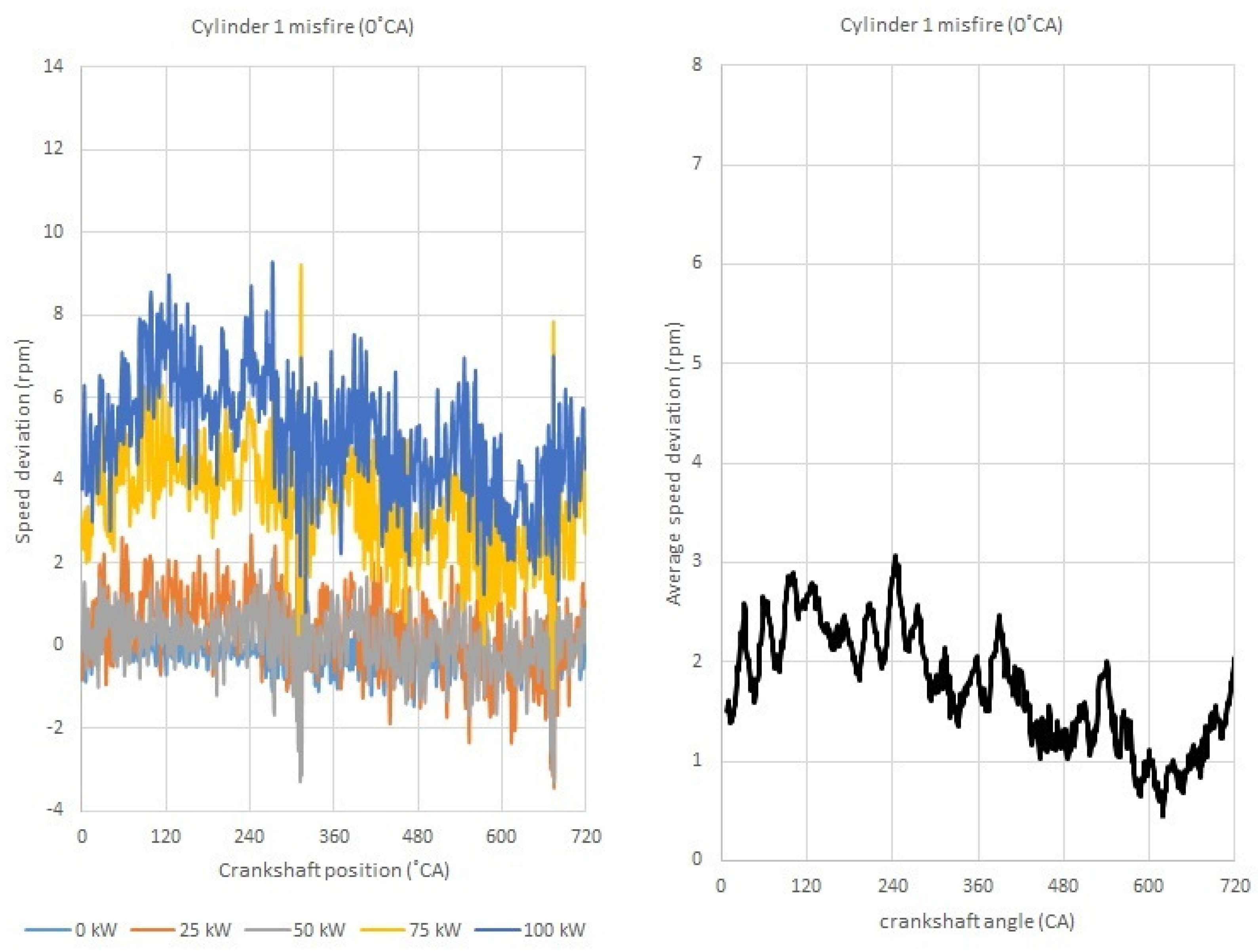
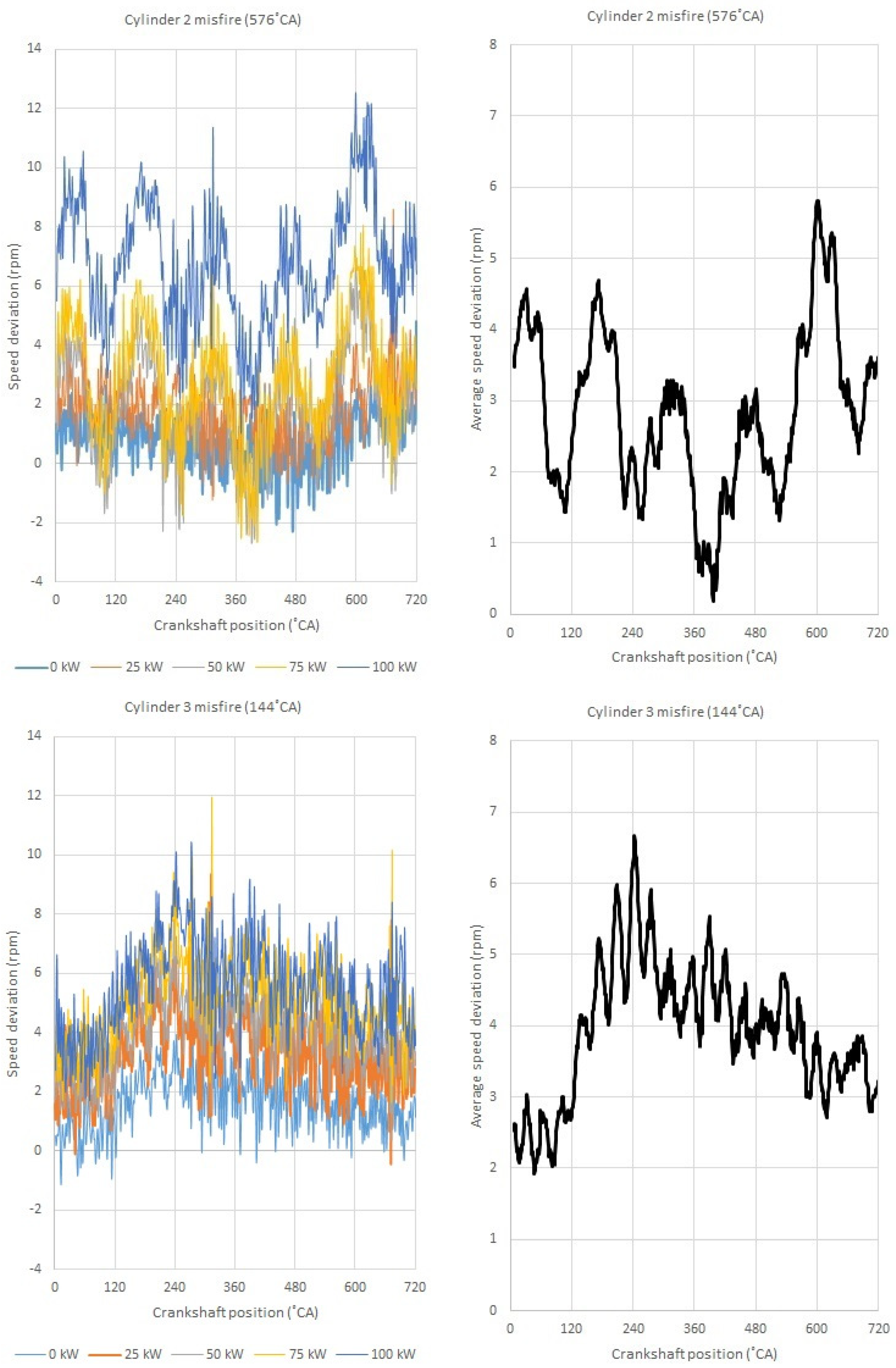
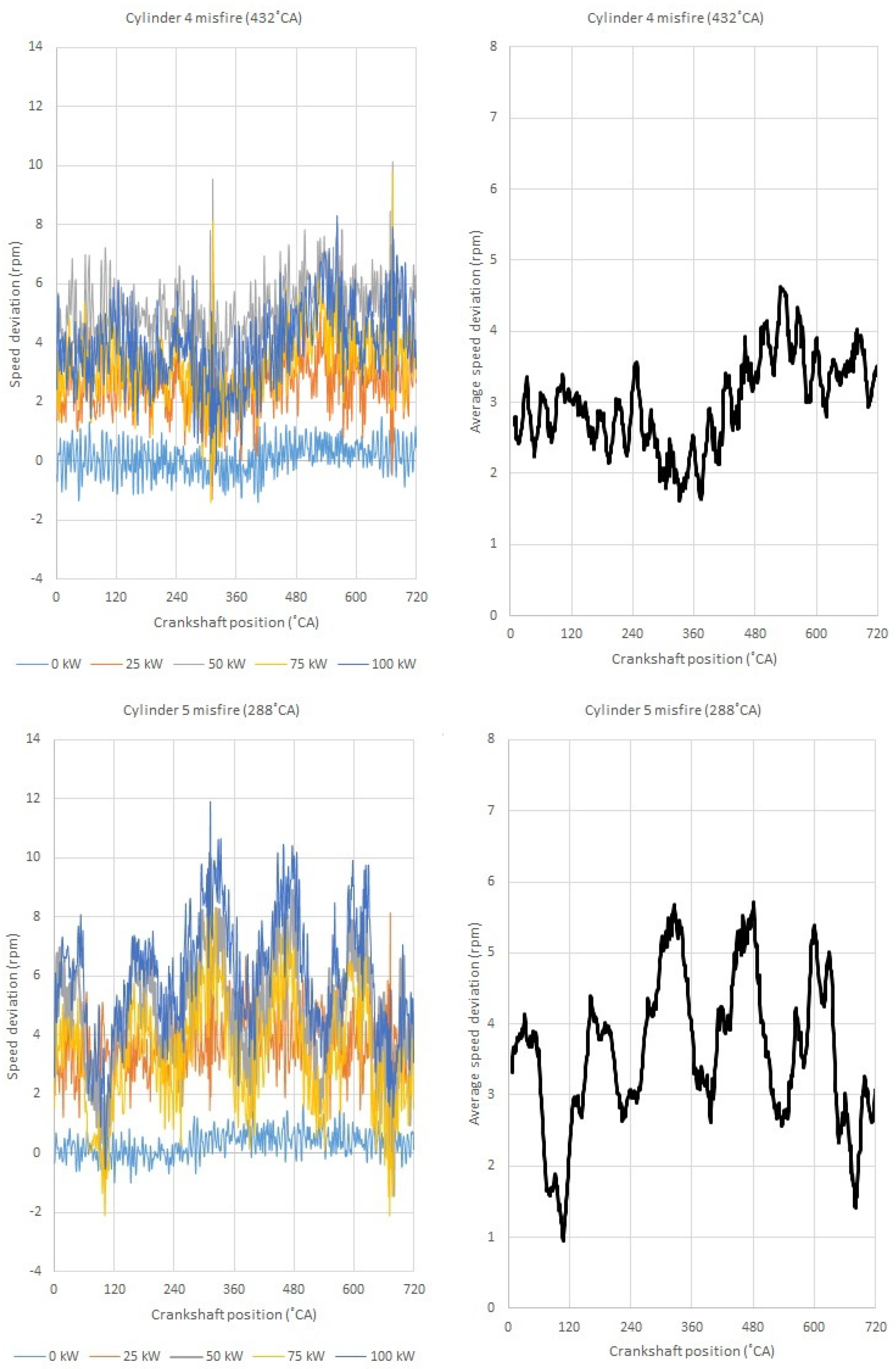
- The deviation from the calculated average for full revolutions m of the engine’s instantaneous rotational speed for each position of the crankshaft allows the technical condition of the engine in the transient state to be evaluated and makes it possible to identify the cylinder system, causing the reduction in engine performance.
- For a given engine and load, there are optimum m and n values that allow sufficient assessment for practical changes in the load and technical condition of the engine.
3. Materials and Methods
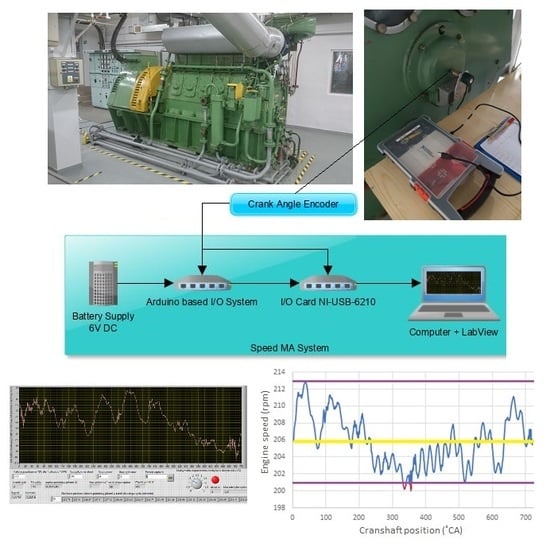
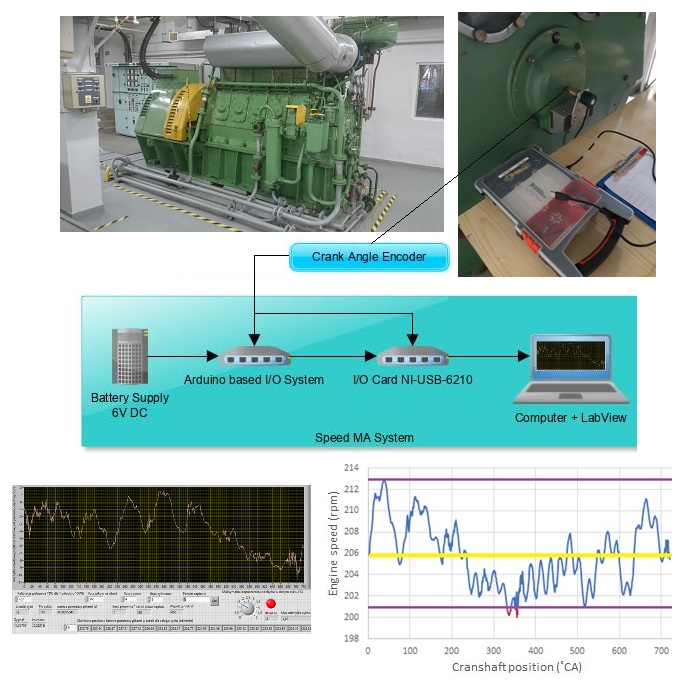
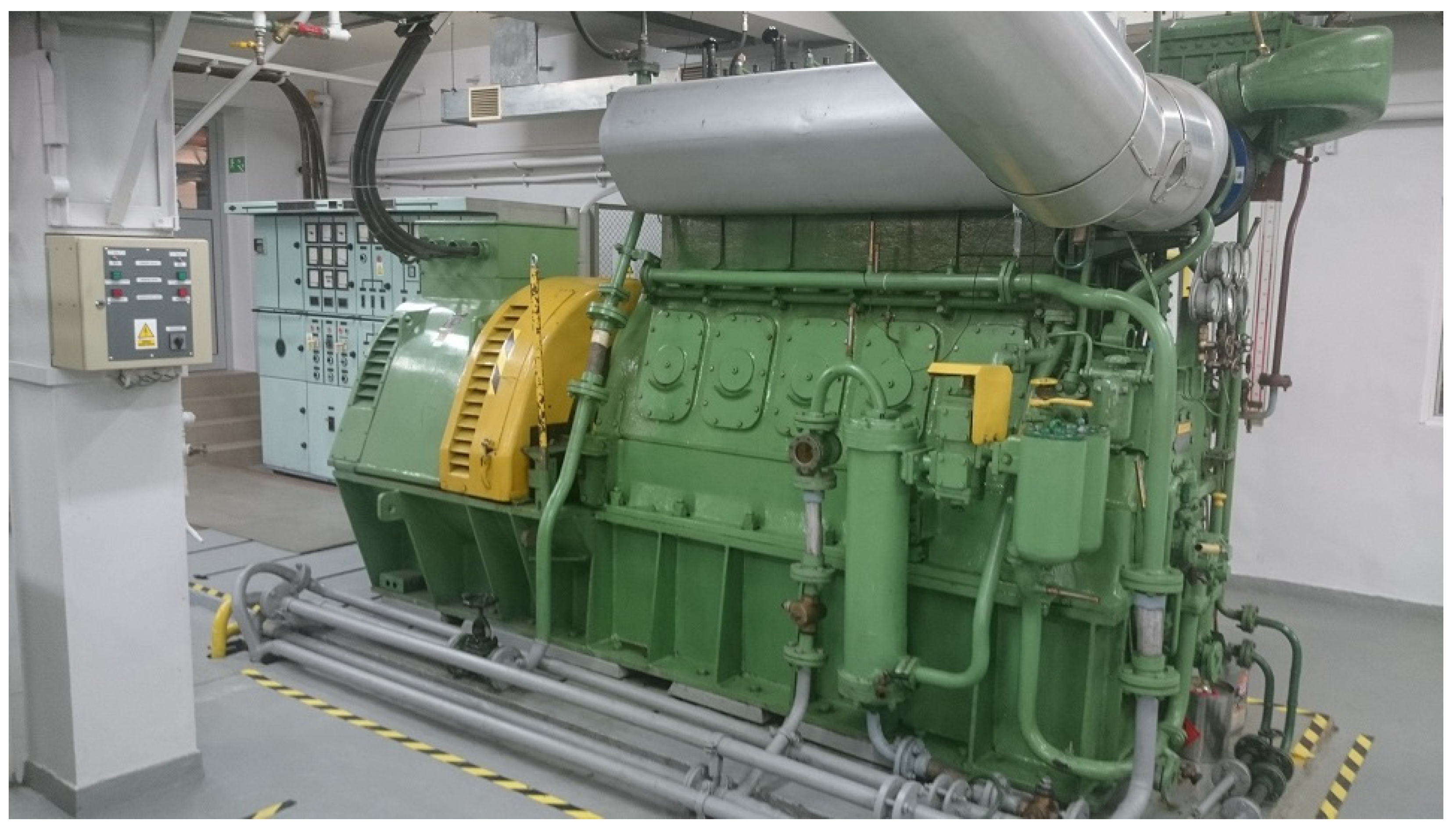
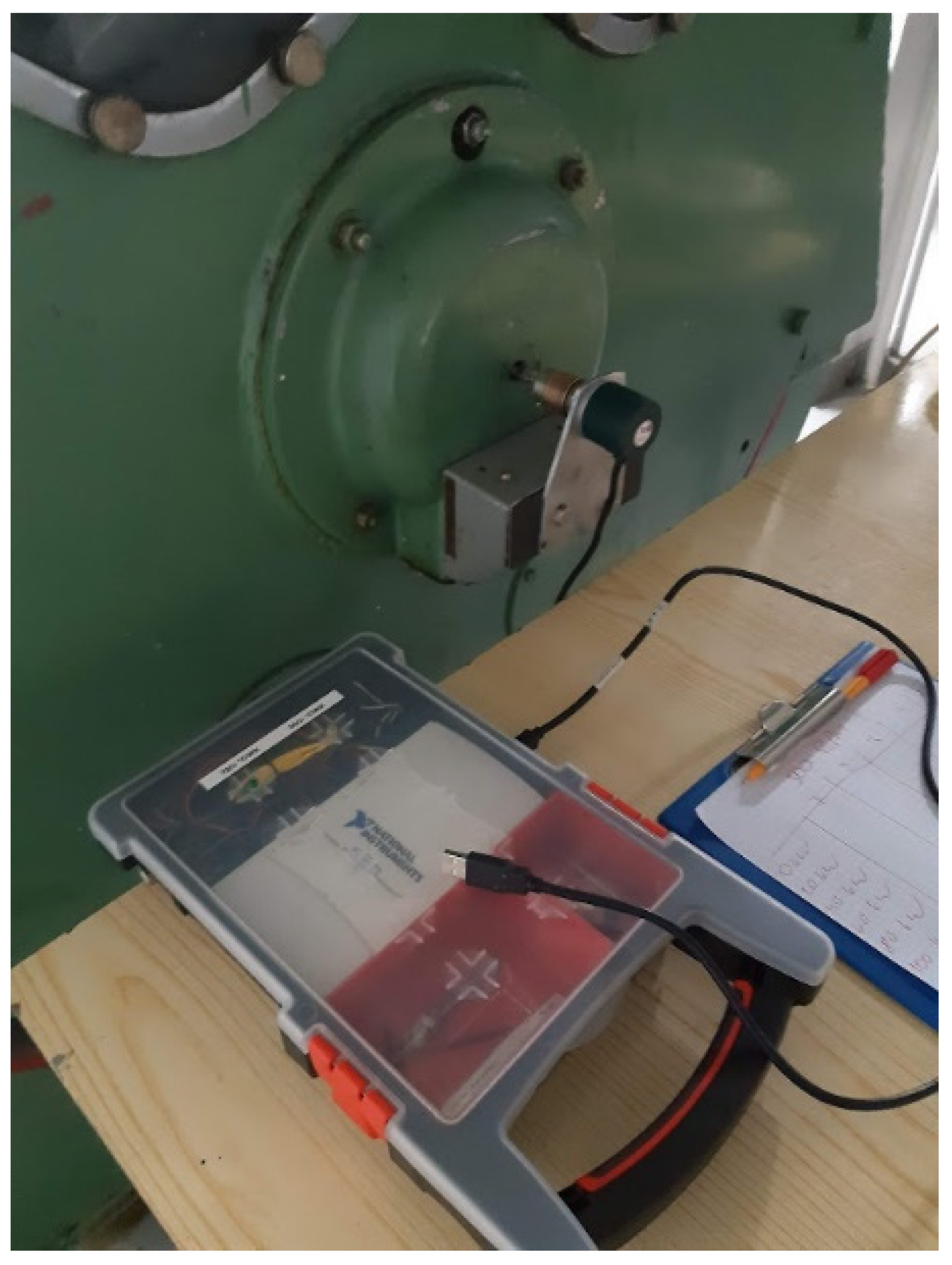
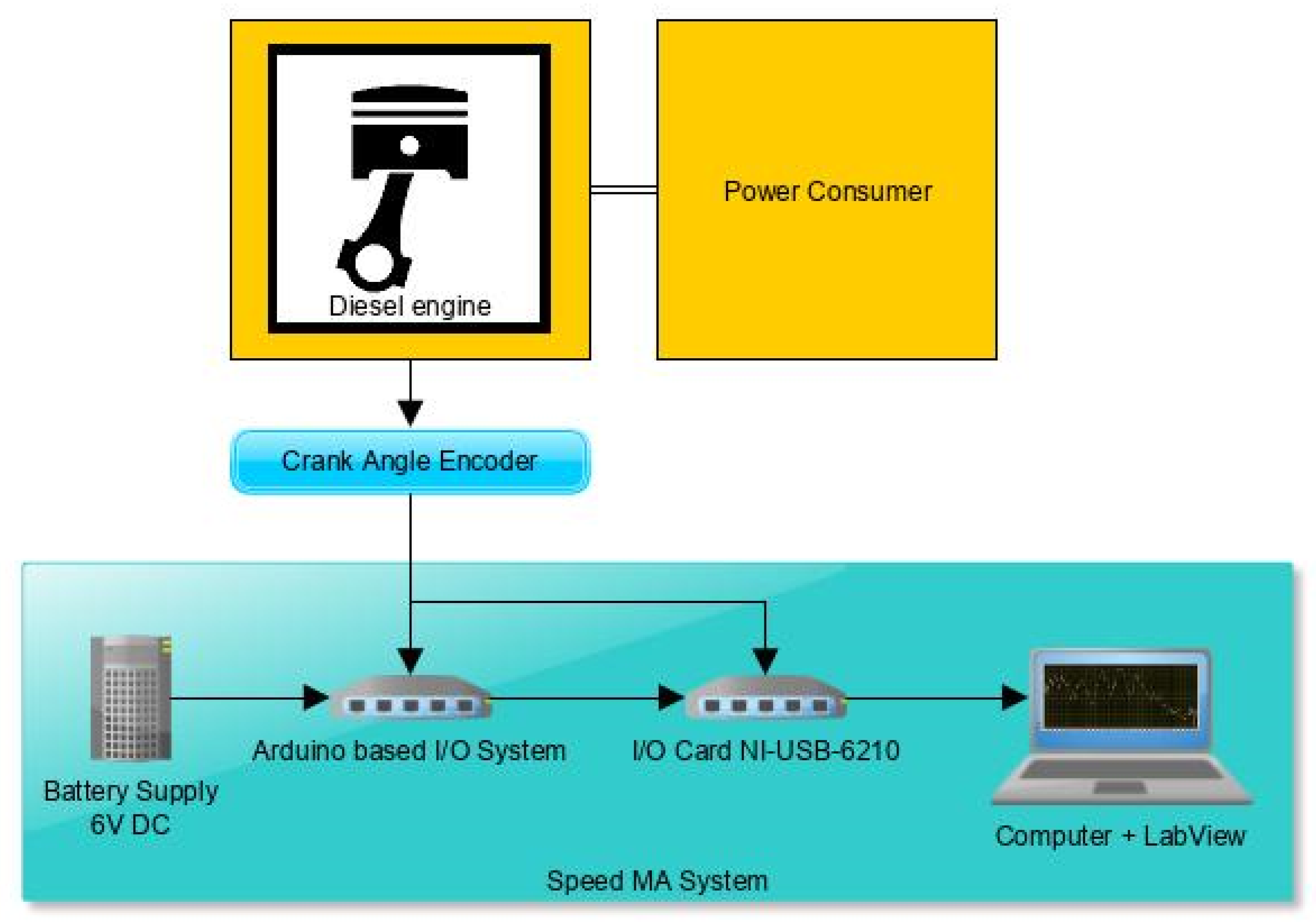
3.1. Test Subjects and Measuring System
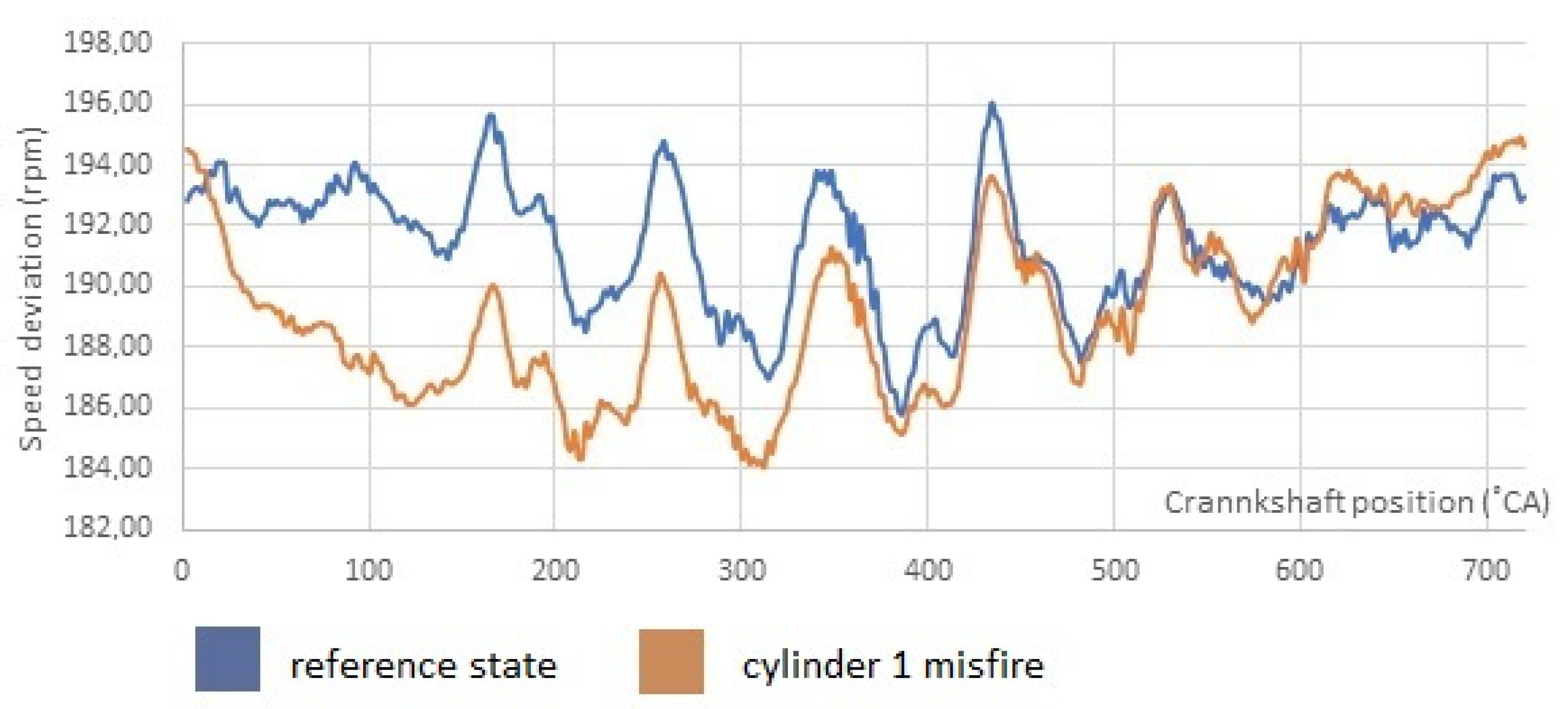
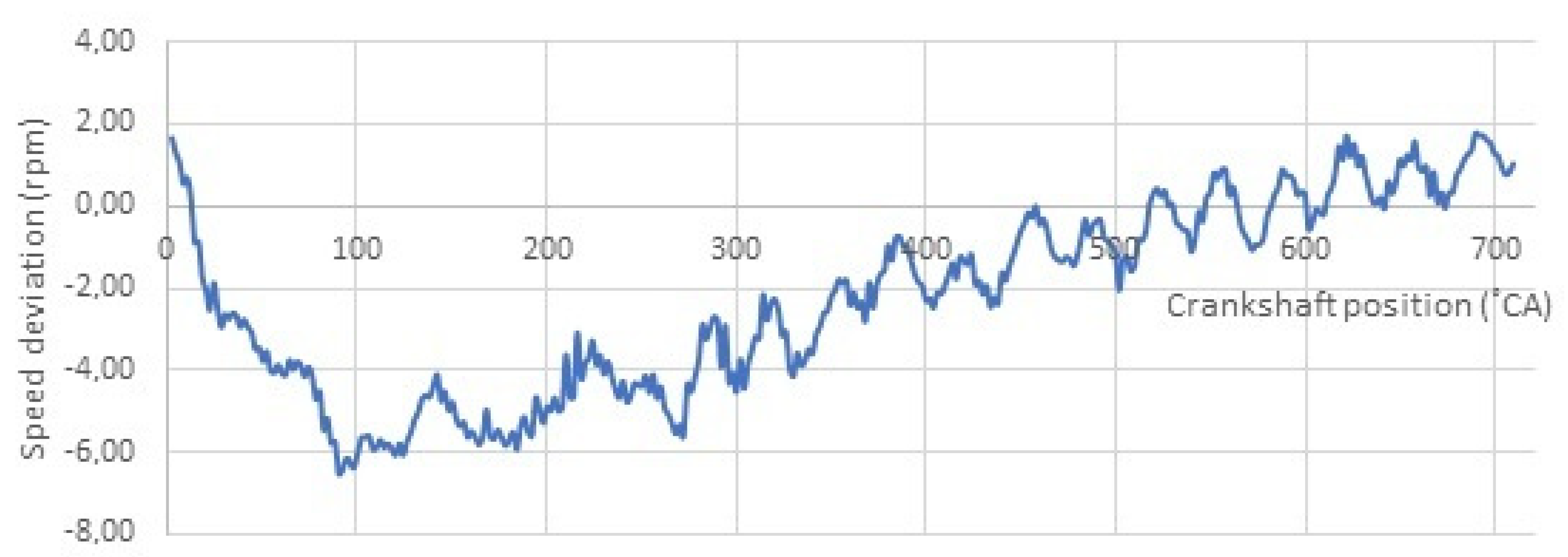
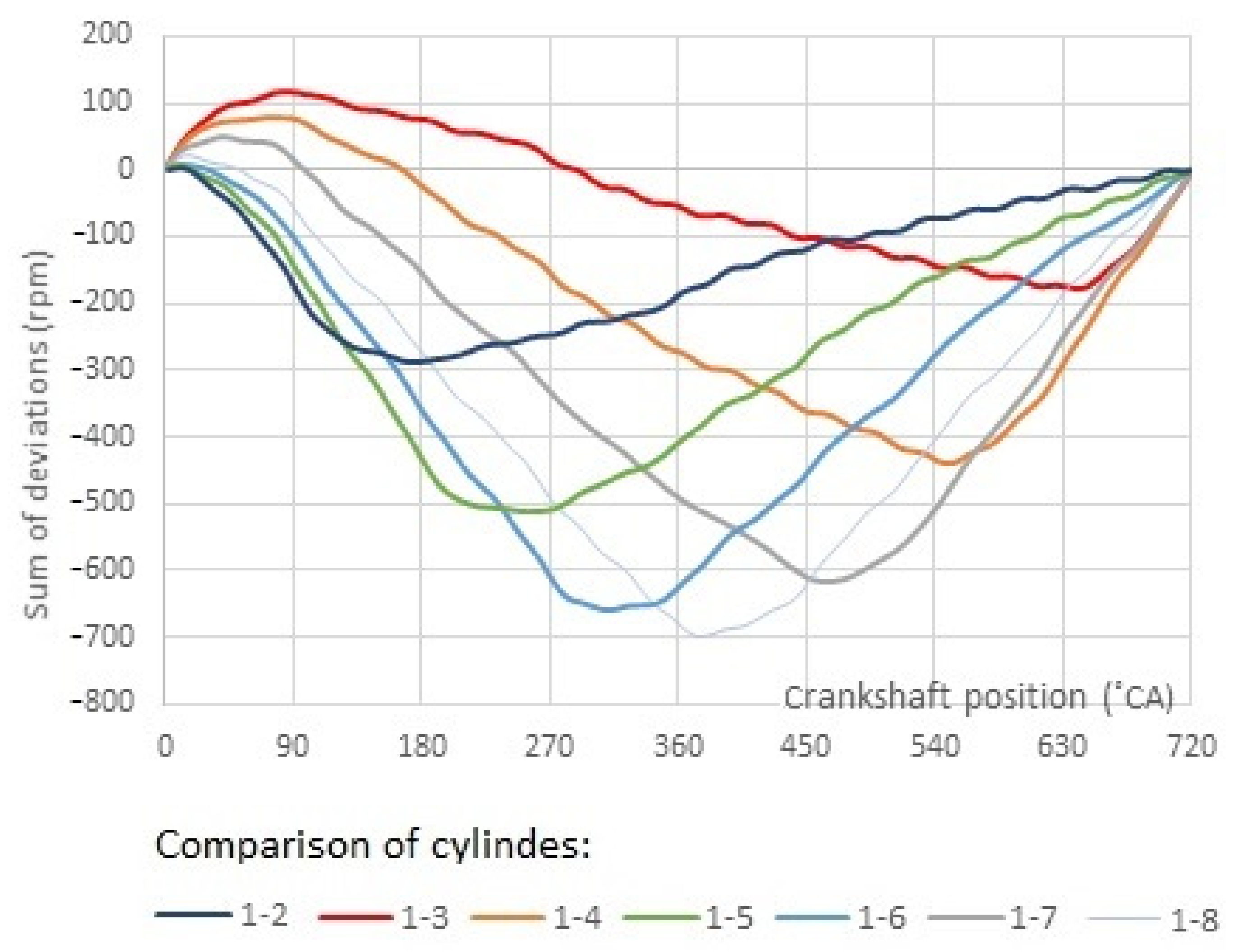
3.2. Measurement Data Processing Algorithm
4. Results and Discussion
5. Conclusions
6. Patents
- Chybowski L., Kazienko D., Method of mechanical load estimation of power machines, preferably piston combustion engines. European Application EP 19460053.2.
- Chybowski L., Kazienko D., The method of mechanical load estimation of power machines, preferably piston combustion engines. Application to Polish Patent Office P.427649.
- Chybowski L., Kazienko D., Electronic device for detecting deviations of the signal from sensors monitoring the state of the diagnosed object and a way of this detection. European Application EP 19460052.4.
- Chybowski L., Kazienko D., Electronic device for detecting deviations of the signal from sensors monitoring the state of the diagnosed object and a way of this detection. Application to Polish Patent Office P.427648.
- Chybowski L., Kazienko D., Universal resistance system supporting the calibration of resistance sensors in energetic machines monitoring systems, preferably internal combustion engines. Application to Polish Patent Office P.429574.
- Chybowski L., Kazienko D., Housing of the detector of diagnostic signals values deviations. Polish Patent Office registered design 25673.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
| ------------------------------------------------- ENCODER-ARDUINO-LAB_VIEW---------------------------------------------- |
| int i = 0; |
| int gmp = 0; |
| int check = 0; |
| void setup() |
| { pinMode (2, INPUT); pinMode (8, OUTPUT); pinMode (9, OUTPUT); pinMode (10, |
| OUTPUT); pinMode (11, OUTPUT); attachInterrupt(0, blinkA, RISING); Serial.begin |
| (9600); } |
| void loop() |
| { while (i != check) |
| { check = i; |
| if (i % 2 == 0) |
| { gmp++; digitalWrite(11, HIGH); digitalWrite(10, HIGH); digitalWrite(9, HIGH); |
| digitalWrite(8, HIGH); delay(50); digitalWrite(11, LOW); digitalWrite(10, LOW); |
| digitalWrite(9, LOW); digitalWrite(8, LOW); } |
| else |
| { digitalWrite(10, HIGH); digitalWrite(8, HIGH); delay(50); |
| digitalWrite(10, LOW); digitalWrite(8, LOW); } |
| } |
| } |
| void blinkA () |
| {i++;} |
| ---------------------------------------------------------------------------END------------------------------------------------------------------- |
References
- Piotrowski, I.; Witkowski, K. Okrętowe Silniki Spalinowe, 3rd ed.; Trademar: Gdynia, Poland, 2003; ISBN 978-83-62227-48-8. [Google Scholar]
- Heywood, J.B. Internal Combustion Engine Fundamentals; McGraw-Hill, Inc.: New York, NY, USA, 1988; ISBN 0-07-028637-X. [Google Scholar]
- Chybowski, L.; Gawdzińska, K.; Laskowski, R. Assessing the Unreliability of Systems during the Early Operation Period of a Ship—A Case Study. J. Mar. Sci. Eng. 2019, 7, 213. [Google Scholar] [CrossRef]
- Chybowski, L.; Laskowski, R.; Gawdzińska, K. An overview of systems supplying water into the combustion chamber of diesel engines to decrease the amount of nitrogen oxides in exhaust gas. J. Mar. Sci. Technol. 2015, 20, 393–405. [Google Scholar] [CrossRef]
- Kazienko, D. The analysis of class survey methods and their impact on the reliability of marine power plants. Zeszyty Naukowe Akademii Morskiej w Szczecinie 2019, 55, 34–43. [Google Scholar]
- Bejger, A.; Drzewieniecki, J.B. The Use of Acoustic Emission to Diagnosis of Fuel Injection Pumps of Marine Diesel Engines. Energies 2019, 12, 4661. [Google Scholar] [CrossRef]
- Winterbone, D.E.; Turan, A. Advanced Thermodynamics for Engineers; Elsevier: Amsterdam, The Netherlands, 2015; ISBN 9780444633736. [Google Scholar]
- Bejger, A.; Chybowski, L.; Gawdzińska, K. Utilising elastic waves of acoustic emission to assess the condition of spray nozzles in a marine diesel engine. J. Mar. Eng. Technol. 2018, 17, 153–159. [Google Scholar] [CrossRef]
- Nozdrzykowski, K.; Chybowski, L. A Force-Sensor-Based Method to Eliminate Deformation of Large Crankshafts during Measurements of Their Geometric Condition. Sensors 2019, 19, 3507. [Google Scholar] [CrossRef]
- Nozdrzykowski, K.; Chybowski, L.; Dorobczyński, L. Model-based estimation of the reaction forces in an elastic system supporting large-size crankshafts during measurements of their geometric quantities. Measurement 2020, 155, 107543. [Google Scholar] [CrossRef]
- Chybowski, L.; Kazienko, D. The Development of an Explosion Protection System in the Starting Air Manifold of a High Power Engine. Syst. Saf. Hum. Tech. Facil. Environ. 2019, 1, 26–34. [Google Scholar] [CrossRef][Green Version]
- Chybowski, L.; Grzebieniak, R.; Matuszak, Z. Diagnosis of The Technical Condition of A Marine Power Plant. Tech. Diagn. 2007, Z1, 1–6. [Google Scholar]
- Kluj, S. Diagnostyka Urządzeń Okrętowych; Studium Doskonalenia Kadr Wyższej Szkoły Morskiej w Gdyni: Gdynia, Poland, 2000. [Google Scholar]
- Chybowski, L.; Matuszak, Z. Marine Auxuliary Diesel Engine Turbocharger Damage (Explosion) Cause Analysis. J. Pol. CIMAC 2007, 2, 33–40. [Google Scholar]
- Korczewski, Z. Exhaust gas temperature measurements in diagnostics of turbocharged marine internal combustion engines. Part I. Standard measurements. Pol. Marit. Res. 2015, 1, 47–54. [Google Scholar] [CrossRef]
- Shrivastava, P.; Verma, T.N. Effect of fuel injection pressure on the characteristics of CI engine fuelled with biodiesel from Roselle oil. Fuel 2020, 265, 117005. [Google Scholar] [CrossRef]
- ICON Research DK-20 Doctor Portable Cylinder Pressure Analyser. Available online: https://iconresearch.co.uk/diesel-engine-analysis/doctor-portable/ (accessed on 30 January 2020).
- ABB AB Force Measurement. Cylmate® Systems Combustion under Control; ABB AB Force Measurement: Västerås, Sweden, 2012. [Google Scholar]
- Leutert Digital Pressure Indicator DPI. Available online: https://www.leutert.com/maritime-division/en/products/digital-pressure-indicator-dpi.php (accessed on 30 January 2020).
- Bueno, A.V.; Velásquez, J.A.; Milanez, L.F. A new engine indicating measurement procedure for combustion heat release analysis. Appl. Therm. Eng. 2009, 29, 1657–1675. [Google Scholar] [CrossRef]
- Caputo, D.C.; Cavataio, P.G.; Fonteriz, V.C.; Ferreira, R.E.; Receloglu, G.A. Processing of internal combustion engine test data using the indicated cycle provided model. Transp. Res. Procedia 2018, 33, 20–27. [Google Scholar] [CrossRef]
- Chybowski, L. Diagnozowanie Silników Okrętowych z Zapłonem Samoczynnym w Oparciu o Analizę Procesów Wtrysku i Spalania Paliwa; Maritime University of Szczecin Press: Szczecin, Poland, 2019. [Google Scholar]
- Martyr, A.J.; Plint, M.A. Engine Testing the Design, Building, Modification and Use of Powertrain Test Facilities, 4th ed.; Butterworth-Heinemann: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Treichel, P. Basics of Prognosis Versus the Evaluation of Marine Propulsion Plant Technical Condition. Sci. J. Marit. Univ. Szczec. Zesz. Nauk. Akad. Mor. W Szczec. 2004, 1, 499–508. [Google Scholar]
- Bonisławski, M.; Hołub, M.; Borkowski, T.; Kowalak, P. A Novel Telemetry System for Real Time, Ship Main Propulsion Power Measurement. Sensors 2019, 19, 4771. [Google Scholar] [CrossRef]
- Kyma KPM. Shaft Power Meter; Kyma KPM: Bergen, Norway, 2010. [Google Scholar]
- VAF Instruments T-Sense® Optical Torque Measuring Systems. Available online: https://www.vaf.nl/media/1049/pb-660-gb-0119-t-sense.pdf?type=Brochure (accessed on 30 January 2020).
- LEMAG. Shaftpower; LEMAG: Rellingen, Germay, 2018. [Google Scholar]
- Borkowski, T.; Kowalak, P.; Myśków, J. Vessel main propulsion engine performance evaluation. J. KONES 2012, 19, 53–60. [Google Scholar] [CrossRef]
- Charchalis, A.; Dereszewski, M. Processing of instantaneous angular speed signal for detection of a diesel engine failure. Math. Probl. Eng. 2013, 2, 659243. [Google Scholar] [CrossRef]
- Connolly, F.T.; Yagle, A.E. Modeling and Identification of the Combustion Pressure Process in Internal Combustion Engines: II—Experimental Results. J. Eng. Gas Turbines Power 1993, 115, 801–809. [Google Scholar] [CrossRef]
- Hao, D.; Zhao, C.; Li, Y.H.G.; Zeng, W.; Li, H. Dynamic Indicated Torque Estimation for Turbocharged Diesel Engines Based on Back Propagation Neural Network. IFAC-PapersOnLine 2018, 51, 720–725. [Google Scholar] [CrossRef]
- Chybowski, L. Assessment Of Marine Engines Torque Load Without Using of The Torquemeter. J. Pol. CIMAC 2008, 3, 60–68. [Google Scholar]
- Dereszewski, M. Wykorzystanie modelu dynamicznego silnika Sulzer 3AL 25/30 do symulacji wpływu obciążenia i uszkodzeń oraz wpływ na niestacjonarność prędkości kątowej. Zesz. Nauk. Akad. Mor. W Gdynii 2013, 81, 28–37. [Google Scholar]
- Xiang, L.; Yang, S.; Gan, C. NoTorsional Vibration Measurements on Rotating Shaft System Using Laser Doppler Vibrometer. Title. Opt. Laser Eng. 2012, 50, 1596–1601. [Google Scholar] [CrossRef]
- Dereszewski, M.; Charchalis, A.; Polanowski, S. Analysis of diagnostic utility of instantaneous angular speed of a sea going vessel propulsion shaft. J. KONES 2011, 18, 77–83. [Google Scholar]
- Rizzoni, G. Diagnosis of Individual Cylinder Misfires by Signature Analysis of Crankshaft Speed Fluctuations. SAE Trans. 1989, 98, 1572–1580. [Google Scholar]
- Johnsson, R. Cylinder pressure reconstruction based on complex radial basis function networks from vibration and speed signals. Mech. Syst. Signal Process. 2006, 20, 1923–1940. [Google Scholar] [CrossRef]
- Lin, T.R.; Tan, A.C.; Ma, L.; Mathew, J. Condition monitoring and fault diagnosis of diesel engines using instantaneous angular speed analysis. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 304–315. [Google Scholar] [CrossRef]
- Łutowicz, M. Unsteady Angular Speed of Diesel Engine Crankshaft Preliminary Examination. J. KONES Powertrain Transp. 2012, 19, 393–399. [Google Scholar] [CrossRef]
- Dereszewski, M. Monitoring of torsional vibration of a crankshaft by intstanteous angular speed observations. J. KONES Powertrain Transp. 2016, 23, 99–106. [Google Scholar] [CrossRef]
- Johnsson, R. Crankshaft Speed Measurements and Analysis for Control and Engines. Ph.D. Thesis, Luleå Tekniska Universitet, Luleå, Sweden, 2001. [Google Scholar]
- Wang, T.; Yan, Y.; Wang, L.; Hu, Y.; Zhang, S. Instantaneous Rotational Speed Measurement Using Image Correlation and Periodicity Determination Algorithms; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Desbazeille, M.; Randall, R.B.; Guillet, F.; El Badaoui, M.; Hoisnard, C. Model-based diagnosis of large diesel engines based on angular speed variations of the crankshaft. Mech. Syst. Signal Process. 2010, 24, 1529–1541. [Google Scholar] [CrossRef]
- Zhang, M.; Zi, Y.; Niu, L.; Xi, S.; Li, Y. Intelligent Diagnosis of V-Type Marine Diesel Engines Based on Multifeatures Extracted From Instantaneous Crankshaft Speed. IEEE Trans. Instrum. Meas. 2019, 68, 722–740. [Google Scholar] [CrossRef]
- Douglas, R.M.; Steel, J.A.; Reuben, R.L.; Fog, T.L. On-line power estimation of large diesel engines using acoustic emission and instantaneous crankshaft angular velocity. Int. J. Engine Res. 2006, 7, 399–410. [Google Scholar] [CrossRef]
- Roy, S.K.; Mohanty, A.R.; Kumar, C.S. Fault detection in a multistage gearbox by time synchronous averaging of the instantaneous angular speed. J. Vib. Control 2016, 22, 468–480. [Google Scholar] [CrossRef]
- Al-Hashmi, S.; Gu, F.; Li, Y.; Ball, A.D.; Fen, T.; Lui, K. Cavitation Detection of a Centrifugal Pump Using Instantanous Angular Speed. In Proceedings of the ESDA04 7th Biennial Conference on Engineering Systems Design and Analysis, Manchester, UK, 19–22 July 2004; ASMEDC: New York, NY, USA, 2004; pp. 185–190. [Google Scholar]
- Chybowski, L.; Kazienko, D. The Method of Mechanical Load Estimation of Power Machines, Preferably Piston Combustion Engines. Patent Application to Polish Patent Office P.427649, 2018. [Google Scholar]
- Chybowski, L.; Kazienko, D. Method of Mechanical Load Estimation of Power Machines, Preferably Piston Combustion Engines. European Patent Application EP 19460053.2, 2019. [Google Scholar]
- Biočanin, S.; Biočanin, M. Measurement crankshaft angular speed of an OM403 engine. Serb. J. Electr. Eng. 2017, 14, 257–275. [Google Scholar] [CrossRef]
- Charles, P.; Sinha, J.K.; Gu, F.; Lidstone, L.; Ball, A.D. Detecting the crankshaft torsional vibration of diesel engines for combustion related diagnosis. J. Sound Vib. 2009, 321, 1171–1185. [Google Scholar] [CrossRef]
- He, Y.; Yang, J.; Li, C.; Duan, F. Experimental Research on Misfire Diagnosis Using the Instantaneous Angular Speed Signal for Diesel Engine; Springer International Publishing: New York, NY, USA, 2015; pp. 637–646. [Google Scholar]
- Li, Z.; Yan, X.; Yuan, C.; Peng, Z. Intelligent fault diagnosis method for marine diesel engines using instantaneous angular speed. J. Mech. Sci. Technol. 2012, 26, 2413–2423. [Google Scholar] [CrossRef]
- Margaronis, I.E. The torsional vibrations of marine Diesel engines under fault operation of its cylinders. Forsch. Ingenieurwes. 1992, 58, 13–25. [Google Scholar] [CrossRef]
- Taglialatela, F.; Lavorgna, M.; Mancaruso, E.; Vaglieco, B.M. Determination of combustion parameters using engine crankshaft speed. Mech. Syst. Signal Process. 2013, 38, 628–633. [Google Scholar] [CrossRef]
- Yang, J.; Pu, L.; Wang, Z.; Zhou, Y.; Yan, X. Fault Detection in a Diesel Engine by Analysing the Instantaneous Angular Speed. Mech. Syst. Signal Process. 2001, 15, 549–564. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors/System | Engine Maker | Nominal/Test Speed (rpm) | Type | Cylinder Number | Nominal/Test Power (kW) | Monitored System Type | Application | Data Presentation/Type of Diagram |
|---|---|---|---|---|---|---|---|---|
| SpeedMA System [49,50] | Sulzer 5 BAH 22 | 500 | L | 5 | 220 | Marine gen-set | Load balance evaluation, cylinder misfire detection, and location | Orthogonal, polar |
| Buckau-Wolf R8DV-136 | 180-360 | L | 8 | 220 | Marine main engine | |||
| S. Biočanin, M. Biočanin [51] | OM403 | 2200 | V | 10 | 287 | Vehicle engine | Misfire detection and location | Orthogonal |
| P. Charles et. al. [52] | No data | 740, 1000 | V | 16, 20 | 8400, 9000 | No data | Polar | |
| M. Dereszewski, A. Charchalis [30,36] | Sulzer 3BAH22 | 600–750 | L | 3 | 100–220 | Marine gen-set | Engine failure detection | Orthogonal |
| M. Desbazeille et. al. [44] | Wartsila diesel V50* | 1500 | V | 20 | 4000 | Marine/stationary gen-set | Faulty fuel pump detection | Orthogonal |
| Y. He et. al. [53] | Weichai WP10-240 | 21,002,200 | L | 6 | 175 | Vehicle engine | Misfire detection | Orthogonal |
| R. Johnsson [38,42] | Scania DCS9 08 | 800–2200 | L | 6 | 280 | Test engine modified for the experiment | Prediction of the maximum combustion pressure | Orthogonal |
| Z. Li et al. [54] | Volvo Penta TAMD165C | 1500 | L | 6 | ca. 560 | Marine gen-set | Engine fault diagnosis | Orthogonal, spectral |
| I. Margaronis [55] | Mirrlees JVSS12 | 750 | No data | 6 | 920 | Marine main engine | Analysis of torque and cylinder pressure correlation | Quantitative measures |
| G. Rizzoni [37] | No data | No data | V | 6 | N/A | Vehicle engine | Cylinder misfire detection and location | Quantitative measures |
| F. Taglialatela et. al. [56] | PFI | 2500 | L | 1 | 10 | Test gasoline engine | Maximum combustion pressure estimation | Quantitative measures |
| J. Yang et al. [57] | 4120 SG | 800–1400 | L | 4 | 48.5 | Test stand | Engine failure detection | Quantitative measures |
| Parameter | Description |
|---|---|
| Manufacturer | VEB SKL–Magdeburg |
| Power Consumer | Fixed pitch propeller |
| Type | 4-stroke, naturally aspirated, trunk engine |
| Number of Cylinders | 8 |
| Cylinder Bore | 240 mm |
| Piston Stroke | 360 mm |
| Cylinder Working Volume | 16.290 dm3 |
| Compression Chamber Volume | 1.205 dm3 |
| Nominal Effective Power | 220 kW |
| Nominal Speed | 360 rpm |
| Mean Piston Speed | 4.32 m/s |
| Nominal Specific Fuel oil Consumption | 238 g/kWh |
| Parameter | Description |
|---|---|
| Manufacturer | ZUT Zgoda |
| Power Consumer | Alternator |
| Type | 4-stroke, turbocharged, trunk engine |
| Number of Cylinders | 5 |
| Cylinder Bore | 220 mm |
| Piston Stroke | 320 mm |
| Nominal Effective Power | 220 kW |
| Nominal Speed | 500 rpm |
| Mean Piston Speed | 5.33 m/s |
| Nominal Specific Fuel Oil Consumption | 232 g/kWh |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kazienko, D.; Chybowski, L. Instantaneous Rotational Speed Algorithm for Locating Malfunctions in Marine Diesel Engines. Energies 2020, 13, 1396. https://doi.org/10.3390/en13061396
Kazienko D, Chybowski L. Instantaneous Rotational Speed Algorithm for Locating Malfunctions in Marine Diesel Engines. Energies. 2020; 13(6):1396. https://doi.org/10.3390/en13061396
Chicago/Turabian StyleKazienko, Damian, and Leszek Chybowski. 2020. "Instantaneous Rotational Speed Algorithm for Locating Malfunctions in Marine Diesel Engines" Energies 13, no. 6: 1396. https://doi.org/10.3390/en13061396
APA StyleKazienko, D., & Chybowski, L. (2020). Instantaneous Rotational Speed Algorithm for Locating Malfunctions in Marine Diesel Engines. Energies, 13(6), 1396. https://doi.org/10.3390/en13061396