Hybrid Control Strategy of MPC and DBC to Achieve a Fixed Frequency and Superior Robustness

Abstract
1. Introduction
2. Modeling
3. Principle of the Hybrid Control Strategy
3.1. The Discrete Lyapunov-Based Method
- (1)
- G (0) = 0;
- (2)
- G (y(k)) > 0, ∀ y(k) ≠ 0;
- (3)
- G (y(k)) → ∞, ∀ ‖y(k)‖ → ∞;
- (4)
- ΔG (y(k)) < 0, ∀ y(k) ≠ 0.
3.2. The Proposed Control Method
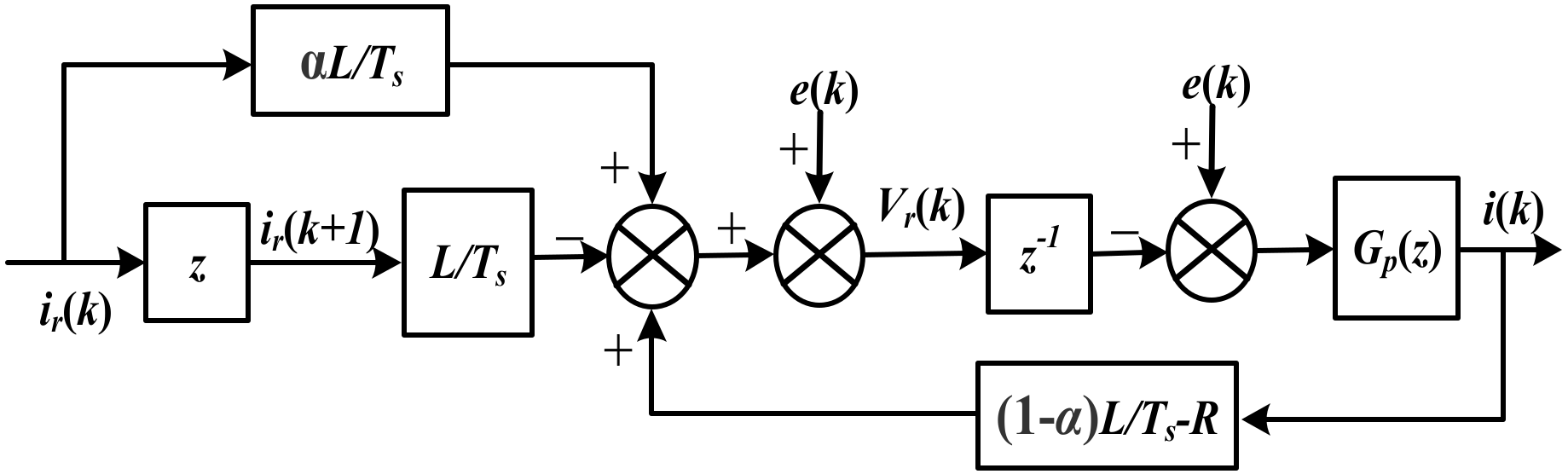
3.2.1. The Improved DBC with Error Correction
3.2.2. The Improved FCS–MPC with Error Correction
4. Impact of the Control Coefficient and Selection of the Switching Condition
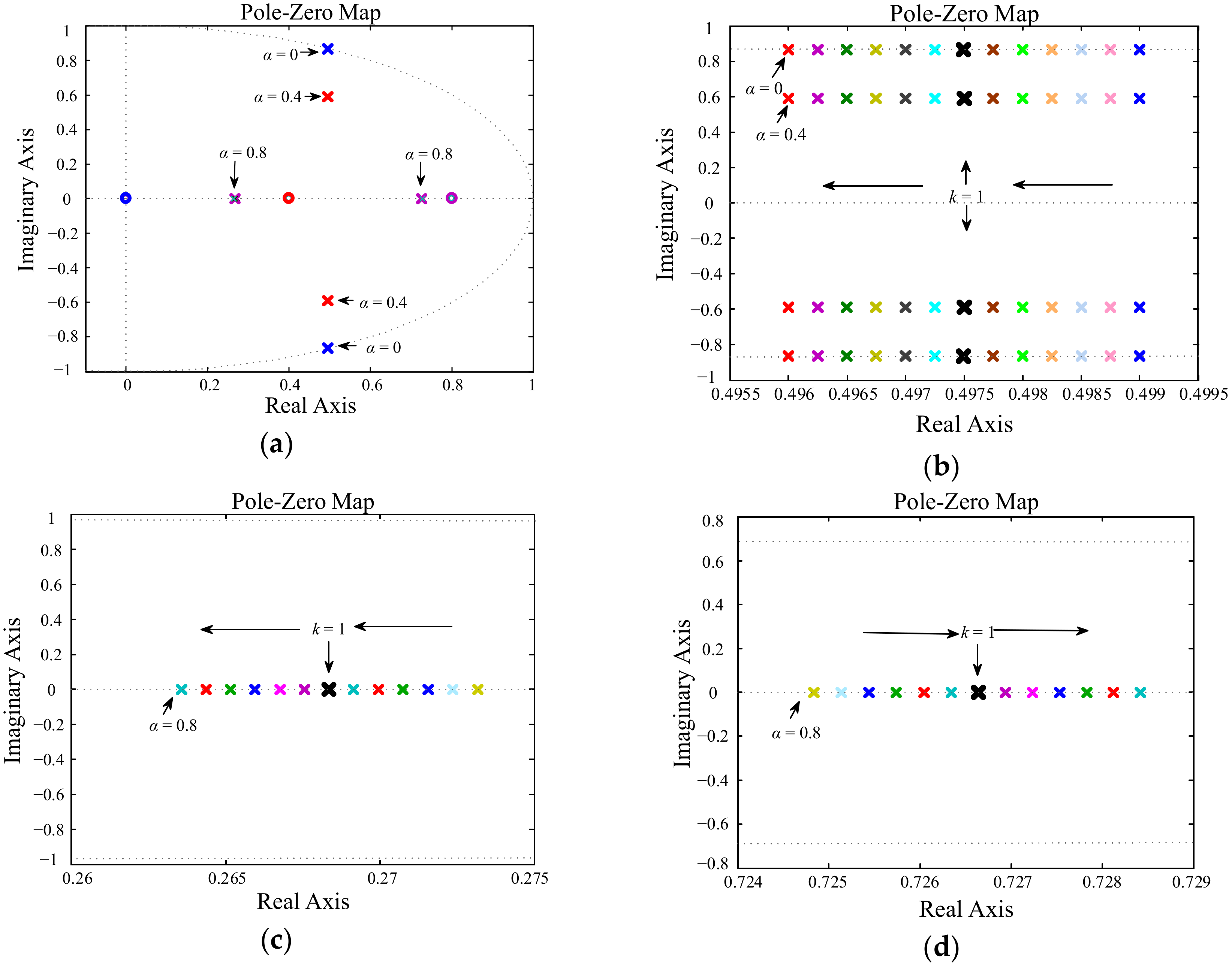
4.1. Robustness Analysis of α for the Improved DBC
4.2. Robustness Analysis of γ for the Improved FCS–MPC
4.3. Transient Response of the Control Coefficient
4.4. Analysis of the Swithing Condition
5. Experimental Results
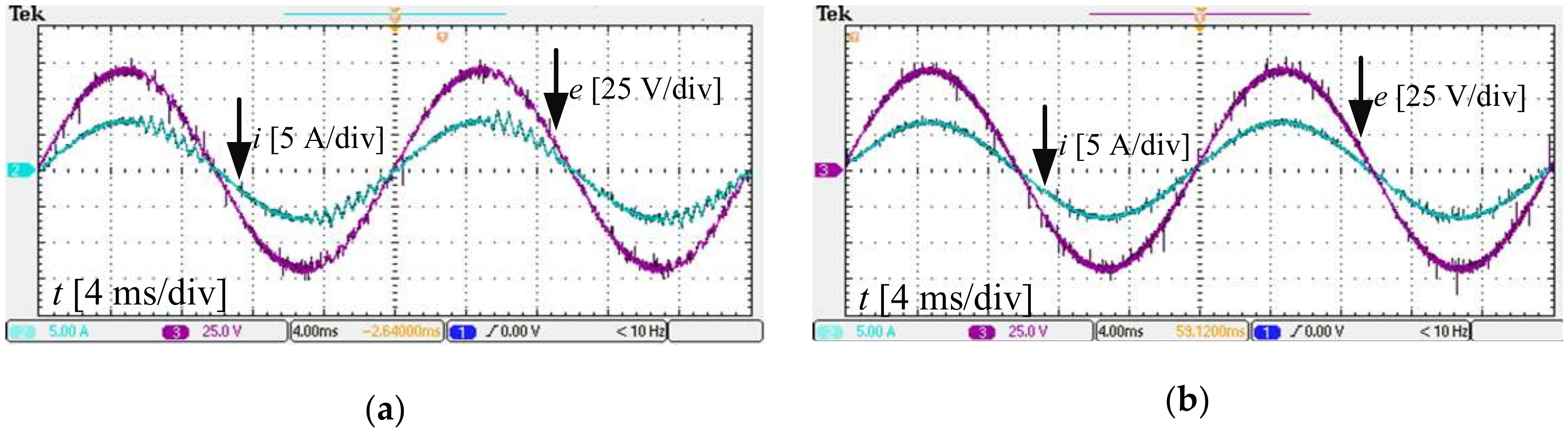
5.1. Steady-State Performance
5.2. Dynamic Response Performance
5.3. Investigation of Robustness
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Testud, J.L.; Richalet, J.; Rault, A.; Papon, J. Model predictive heuristic control: Application to industrial processes. Automatica 1978, 14, 413–428. [Google Scholar]
- Car, G.K.; Skrjanc, I. Tracking-error model-based predictive control for mobile robots in real time. J. Robot. Auton. Syst. 2007, 55, 460–469. [Google Scholar]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2012. [Google Scholar]
- Morari, M.; Lee, J.H. Model predictive control: Past, present and future. Comput. Chem. Eng. 1999, 23, 667–682. [Google Scholar] [CrossRef]
- Camacho, E.F.; Bordons, C. Model predictive control. In Advanced Textbooks in Control and Signal Processing; Springer: London, UK, 2004. [Google Scholar]
- Aguirre, M.; Kouro, S.; Rojas, C.A.; Rodriguez, J.; Leon, J.I. Switching Frequency Regulation for FCS-MPC Based on a Period Control Approach. IEEE Trans. Ind. Electron. 2018, 65, 5764–5773. [Google Scholar] [CrossRef]
- Mariethoz, S.; Beccuti, A.G.; Papafotiou, G.; Morari, M. Sensorless explicit model predictive control of the DC-DC buck converter with inductor current limitation. In Proceedings of the Twenty-Third Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 24–28 February 2008. [Google Scholar]
- Preindl, M.; Schaltz, E. Sensorless model predictive direct current control using novel second order PLL-observer for PMSM drive systems. IEEE Trans. Ind. Electron. 2011, 58, 4087–4095. [Google Scholar] [CrossRef]
- Rodriguez, J.O.S.E.; Pontt, J.O.R.G.E.; Silva, C.E.S.A.R.; Salgado, M.; Rees, S.; Ammann, U.; Cortés, P. Predictive control of three-phase inverter. Electron. Lett. 2004, 40, 561–562. [Google Scholar] [CrossRef]
- Rodriguez, J.; Pontt, J.; Silva, C.A.; Correa, P.; Lezana, P.; Cortés, P.; Ammann, U. Predictive current control of a voltage source inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Salinas, F.; Gonzalez, M.A.; Escalante, M.F. Finite control set model predictive control of a flying capacitor multilevel chopper using petri nets. IEEE Trans. Ind. Electron. 2016. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, W.; Li, Z.; Zhang, Y. Low Complexity Model Predictive Power Control—Double Vector-Based Approach. IEEE Trans. Power Electron. 2014, 61, 5871–5880. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, W.; Li, Z.; Zhang, Y. Model predictive direct power control of PWM rectifier with duty cycle optimization. IEEE Trans. Power Electron. 2013, 28, 5343–5351. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Yang, H.; Fan, S. New Insights into Model Predictive Control for Three-Phase Power Converters. IEEE Trans. Ind. Appl. 2019, 55, 1973–1982. [Google Scholar] [CrossRef]
- Hu, J. Improved dead-beat predictive DPC strategy of grid-connected DC-AC converters with switching loss minimization and delay compensations. IEEE Trans. Ind. Inform. 2013, 9, 728–738. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, Z.Q. Improved voltage-vector sequences on dead-beat predictive direct power control reversible three-phase grid-connected voltage-source converters. IEEE Trans. Power Electron. 2008, 28, 254–267. [Google Scholar] [CrossRef]
- Cortés, P.; Rodríguez, J.; Quevedo, D.E.; Silva, C. Predictive current control strategy with imposed load current spectrum. IEEE Trans. Power Electron. 2008, 23, 612–618. [Google Scholar] [CrossRef]
- Tarisciotti, L.; Formentini, A.; Gaeta, A.; Degano, M.; Zanchetta, P.; Rabbeni, R.; Pucci, M. Model Predictive Control for Shunt Active Filters with Fixed Switching Frequency. IEEE Trans. Ind. Appl. 2017, 53, 296–304. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J. Analysis of finite control set model predictive current control with model parameter mismatch in a three phase inverter. IEEE Trans. Ind. Electron. 2016, 63, 3100–3107. [Google Scholar] [CrossRef]
- Xia, C.; Wang, M.; Song, Z.; Liu, T. Robust model predictive current control of three-phase voltage source PWM rectifier with online disturbance observation. IEEE Trans. Ind. Inform. 2012, 8, 459–471. [Google Scholar] [CrossRef]
- Du, G.; Li, J.; Liu, Z. The improved model predictive control based on novel error correction between reference and predicted current. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 3005–3010. [Google Scholar]
- Li, H.; Liu, S. Speed control for PMSM servo system using predictive functional control and extended state observer. IEEE Trans. Ind. Electron. 2012, 59, 1171–1183. [Google Scholar] [CrossRef]
- Espí, J.M.; Castello, J.; García-Gil, R.; Garcera, G.; Figueres, E. An adaptive robust predictive current control for three-phase grid-connected inverters. IEEE Trans. Ind. Electron. 2011, 58, 3537–3546. [Google Scholar] [CrossRef]
- Arif, B.; Tarisciotti, L.; Zanchetta, P.; Clare, C.J.; Degano, M. Grid Parameter Estimation Using Model Predictive Direct Power Control. IEEE Trans. Ind. Appl. 2015, 51, 4614–4622. [Google Scholar] [CrossRef]
- Shen, K.; Zhang, J. Modeling Error Compensation in FCS-MPC of a Three-phase Inverter. In Proceedings of the IEEE International Conference on Power Electronics, Drives and Energy Systems, Bengaluru, India, 16–19 December 2012; pp. 1–6. [Google Scholar]
- Siami, M.; Khaburi, D.A.; Abbaszadeh, A.; Rodríguez, J. Robustness Improvement of Predictive Current Control Using Prediction Error Correction for Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2016, 63, 3458–3466. [Google Scholar] [CrossRef]
- Du, G.; Li, J.; Du, F.; Liu, Z. A Robust Digital Control Strategy Using Error Correction Based on the Discrete Lyapunov Theorem. Energies 2018, 11, 848. [Google Scholar]
- Du, G.; Liu, Z.; Du, F.; Li, J. Performance Improvement of Model Predictive Control Using Control Error Compensation for Power Electronic Converters Based on the Lyapunov Function. J. Power Electron. 2017, 17, 983–990. [Google Scholar]
- Kwak, S.; Yoo, S.J.; Park, J. Finite control set predictive control based on Lyapunov function for three-phase voltage source inverters. IET Power Electron. 2014, 7, 2726–2732. [Google Scholar] [CrossRef]
- Parvez, M.; Mekhilef, S.; Tan, N.M.L.; Akagi, H. A robust modified model predictive control (MMPC) based on Lyapunov function for three-phase active-front-end (AFE) rectifier. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 18–24 March 2016; pp. 1163–1168. [Google Scholar]
- Akter, M.P.; Mekhilef, S.; Tan, N.M.L.; Akagi, H. Modified model predictive control of a bidirectional AC-DC converter based on Lyapunov function for energy storage systems. IEEE Trans. Ind. Electron. 2016, 63, 704–715. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J.; Abu-Rub, H. Assessing Finite-Control-Set Model Predictive Control: A Comparison with a Linear Current Controller in Two-Level Voltage Source Inverters. IEEE Ind. Electron. Mag. 2014, 8, 44–52. [Google Scholar] [CrossRef]
- Xie, W.; Wang, X.; Wang, F.; Xu, W.; Kennel, R.M.; Gerling, D.; Lorenz, R.D. Finite-Control-Set Model Predictive Torque Control with a Deadbeat Solution for PMSM Drives. IEEE Trans. Ind. Electron. 2015, 62, 5402–5410. [Google Scholar] [CrossRef]
- Abbaszadeh, A.; Khaburi, D.A.; Mahmoudi, H.; Rodríguez, J. Simplified model predictive control with variable weighting factor for current ripple reduction. IET Power Electron. 2017, 10, 1165–1174. [Google Scholar] [CrossRef]
- Slotineand, J.-J.E.; Li, W. Applied Nonlinear Control, Englewood Cliffs; Prentice-Hall: Upper Saddle River, NJ, USA, 1991. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | System Parameters | Value |
|---|---|---|
| e | grid voltage | 50 V/50 Hz |
| L | Filter inductance | 3.1 mH |
| R | Equivalent series resistance | 0.3 Ω |
| C | DC side capacitor | 1000 μF |
| Ts | Sampling period | 100 us |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Du, G.; Li, J.; Lei, Y. Hybrid Control Strategy of MPC and DBC to Achieve a Fixed Frequency and Superior Robustness. Energies 2020, 13, 1176. https://doi.org/10.3390/en13051176
Zhang Y, Du G, Li J, Lei Y. Hybrid Control Strategy of MPC and DBC to Achieve a Fixed Frequency and Superior Robustness. Energies. 2020; 13(5):1176. https://doi.org/10.3390/en13051176
Chicago/Turabian StyleZhang, Yuhan, Guiping Du, Jiajian Li, and Yanxiong Lei. 2020. "Hybrid Control Strategy of MPC and DBC to Achieve a Fixed Frequency and Superior Robustness" Energies 13, no. 5: 1176. https://doi.org/10.3390/en13051176
APA StyleZhang, Y., Du, G., Li, J., & Lei, Y. (2020). Hybrid Control Strategy of MPC and DBC to Achieve a Fixed Frequency and Superior Robustness. Energies, 13(5), 1176. https://doi.org/10.3390/en13051176