Modeling the Impact of Modified Inertia Coefficient (H) due to ESS in Power System Frequency Response Analysis

 , ,
, ,  ,
,  and
and 
Abstract
1. Introduction
1.1. Background and Motivation
1.2. Contribution and Organization
- The major part of existing literature that addresses the FR process in the presence of ESS considers a conventional load frequency control (LFC) model [8,15,18,21]. Some other studies, such as [17,22], adopt modified LFC models to attain the objective of FR while considering the connection or disconnection of a large load or generation. In these studies, however, there is no to very little contemplation over the intrinsic changes to the power system due to the addition of energy storage devices. In contrast, the proposed work investigates the FR process by introducing a novel stability analysis which considers frequency deviation not only as a function of load disturbance but also a function of .
- A sensitivity function is defined and derived to show the impact of variations in on the PSFR in the developed LFC model. The results are compared with the conventional model. It is notable that the sensitivity function developed in this work emphasizes on in comparison to studies such as [23,24,25,26,27], where sensitivity function is developed for the load-damping coefficient or other system parameters.
- The results show that errors in the calculation of the inertia constant affect the system performance and stability. Although, for essentially stable systems, the effects of miscalculated inertia constants are overshadowed by external disturbances, and the existing controls system of the power system is robust enough to overcome these effects. However, the consequences are adverse when the system is unstable or has a low stability margin. Alternatively, it means that the frequency protection devices may malfunction due to miscalculated.
- Please note that the presented work mainly focuses on the modified LFC model considering changes in and analytical results obtained thereof in a MATLAB/Simulink environment. To find out how wind and solar systems affect the value of the inertia constant and similar topics, please refer to other resources, such as [28,29,30,31]. Further, implementation of the proposed model in a hardware-in-the-loop setup or using a detailed machine model is not reported in this work.
2. Derivation of Sensitivity Function
2.1. Power System with Primary Control
2.2. Power System with Primary and Supplementary Controls
3. Stability Analysis
3.1. Stable Power System
3.2. Unstable Power System
3.3. Calculation of Maximum Frequency Deviation
4. Case Studies
- Case I: A stable power system with primary control.
- Case II: An unstable power system with primary control.
- Case III: A stable power system with primary and supplementary controls.
- Case IV: An unstable power system with primary and supplementary controls.
4.1. Case I: A Stable Power System with Primary Control
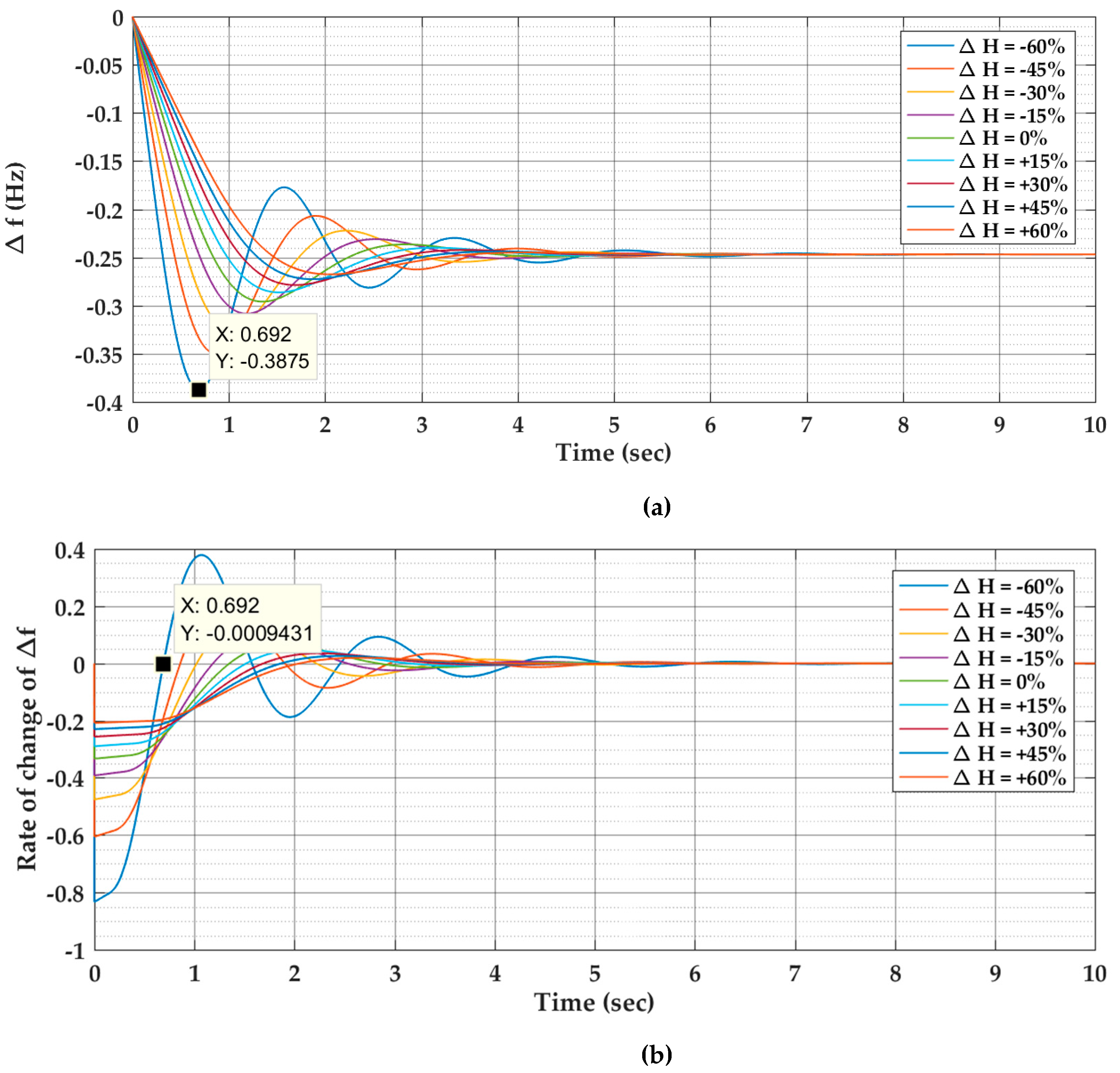
- In a stable power system with only primary control, the level of frequency deviation changes with , as shown in Figure 4a. For the same load disturbance, the maximum frequency deviation is different from the one calculated using a fixed value of (i.e., the case when ).
- The observation presented in the preceding point has significant implications over the conventional model, which does not consider the effect of changes in H over the frequency deviation. From Figure 4a, it is evident that the error in calculation of the amount of frequency deviation could be as high as 43% for the extreme cases (i.e., ) and 30% for It is notable that, from a practical perspective, only a major portion of ESS devices can introduce such a significant difference. However, the results presented in Figure 4a indicate the importance of considering variation in the inertia constant.
- Additionally, the observation presented in the previous points has practical applications as well. For example, the capacity determination of spinning/nonspinning reserves is also dependent on the calculated frequency deviation; therefore, an error in the estimation can lead to over/undercapacity reserves. Similarly, the reliability of frequency relays is also jeopardized if is miscalculated or there are changes in its value due to the virtual inertia provided by ESS. It is once again iterated that, in conventional LFC models, the value of is considered to be constant and does not change during an operational time-period.
- The rate of change of the frequency deviation in Figure 4b is zero when the frequency deviation in Figure 4a touches a maximum or minimum point. As discussed earlier, the first zero-crossing of corresponds to in a stable power system. This is demonstrated for a simulation run with . The maximum frequency deviation occurs at , as verified by the curve shown in Figure 4b. For the sake of clarity, this observation is highlighted for only one case, although it is valid for all simulation cases.
4.2. Case II: An Unstable Power System with Primary Control
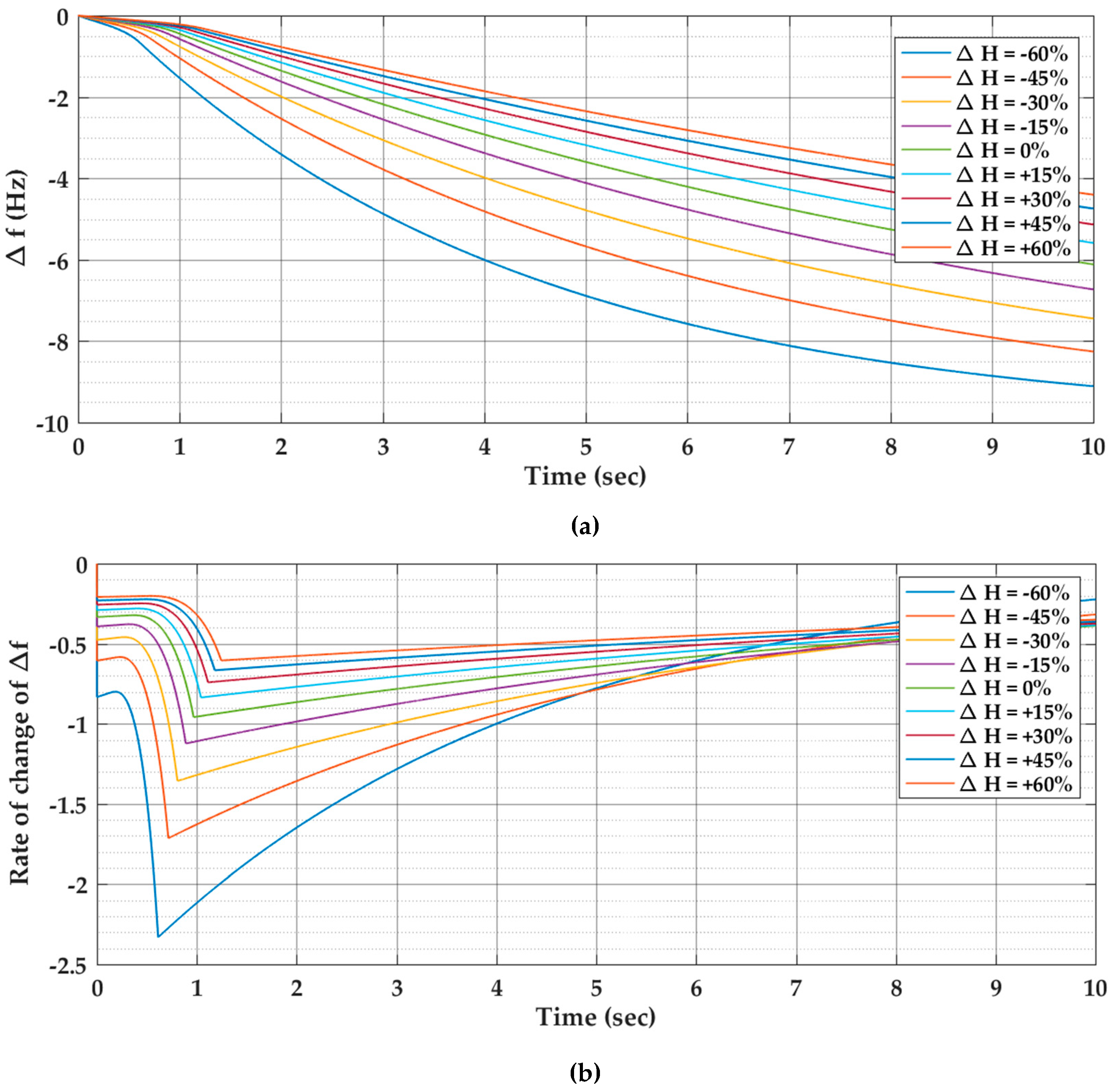
- Although the frequency response is unstable in all cases, however, the level of the frequency deviation changes with , as shown in Figure 5a. In some cases, the response of the frequency deviation is quicker than the other cases.
- The observation presented in the preceding point also has practical considerations. For example, the frequency relays can mal-operate if is miscalculated or there are changes in its value due to the virtual inertia provided by ESS.
- As the frequency deviation goes much beyond the operational limits, the shown simulation time of in this study provides enough information. Since the power system is unstable, the frequency deviation should (theoretically) keep on increasing, and its time derivative will not be zero. In any case, the practical power plants have control, and protective devices (e.g., frequency relays or generation rate limiters) that do not allow their operation after certain limits on and are met.
4.3. Case III: A Stable Power System with Primary and Supplementary Controls
- For the same load disturbance, the level of frequency deviation changes with . As shown in Figure 6a, and are different for all cases. This observation calls for the need of accurate information about the power system’s inertia constant. It is notable that, as long as the power system reserves have enough capacity, the stability of a power system is not jeopardized. In any case, a significant difference in the actual and calculated value of may result in insensitive or oversensitive behavior of the protective relays. It is once again explained that a huge amount of ESS can introduce such a significant difference.
- Whenever reaches a maximum or minimum point, , as shown in Figure 6b. As discussed earlier, the first zero crossing of corresponds to in a stable power system. This is demonstrated for a simulation run with . The maximum frequency deviation occurs at as verified by the curve shown in Figure 6b. For the sake of clarity, this observation is highlighted for only one case, although it is valid for all simulation cases.
4.4. Case IV: An Unstable Power System with Primary and Supplementary Controls
- Although the frequency response is unstable in all cases, however, the level of the frequency deviation changes with, as shown in Figure 7a. In some cases, the response of the frequency deviation is quicker than the other cases. In other words, the frequency relays can trip earlier or later than expected if there is a difference between the actual and calculated .
- As shown in Figure 7b, the rate of change in the frequency deviation will not go to zero for an unstable power system. This is due to the existence of a right-half plane pole in the system TF, which makes the error grow. It is once again explained that, due to the deployment of the GRC, the response does not shoot instantaneously. The results shown in Figure 7 are for a demonstrative purpose to show the significance of an accurate calculation of for an improved PSFR. Further, the practical systems do have watchful protection that does not allow the generator to operate beyond set limits [6].
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations and Nomenclature
| c | % of power generated in the reheat portion |
| Damping coefficient of a power system | |
| DER | Distributed or dispersed energy resources |
| ESS | Energy storage system |
| Inertia constant of a power system | |
| Supplementary control constant | |
| Laplace and inverse Laplace operator | |
| Supplementary controller | |
| LFC | Load frequency control |
| PSFR | Power system frequency response |
| Droop characteristics | |
| TF | Transfer function |
| Time where maximum frequency deviation occurs | |
| Time constant of governor | |
| Time where maximum frequency deviation occurs | |
| Time constant of non-reheat turbine | |
| Time constant of hydro turbine | |
| VI | Virtual inertia |
| VISMA | Virtual synchronous machine |
| A small number whose value is less than 1 | |
| A large number whose value is more than 1 | |
| Maximum value of frequency deviation | |
| Frequency deviation in time-domain | |
| Frequency deviation in frequency-domain | |
| Load disturbance | |
| A unit less sensitivity function | |
| Norm of |
Appendix A
Appendix B
Appendix C
Appendix D

References
- Anderson, P.M.F. Power System Control and Stability; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Machowski, J.; Bialek, J.W.; Bumby, J. Power System Dynamics: Stability and Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Amraee, T.; Darebaghi, M.G.; Soroudi, A.; Keane, A. Probabilistic under frequency load shedding considering RoCoF relays of distributed generators. IEEE Trans. Power Syst. 2018, 33, 3587–3598. [Google Scholar] [CrossRef]
- Wang, L.; Sun, W.; Zhao, J.; Liu, D. A Speed-Governing System Model with Over-Frequency Protection for Nuclear Power Generating Units. Energies 2019, 13, 137. [Google Scholar] [CrossRef]
- Jia, J.; Yang, G.; Nielsen, A.H.; Rønne-Hansen, P. Hardware-in-the-loop Tests on Reverse Power and Over-Frequency Protection for Synchronous Condensers. In Proceedings of the Cigre Aalborg 2019: International Symposium, Aalborg, Denmark, 4–7 June 2019; p. 104. [Google Scholar]
- Power Systems Relaying Committee. IEEE Guide for the Application of Protective Relays Used for Abnormal Frequency Load Shedding and Restoration. IEEE Std C 2007, 37, 1–55. [Google Scholar]
- Bevrani, H. Robust Power System Frequency Control; Springer International Publishing: Cham, Switzerland, 2014. [Google Scholar]
- Zhong, Q.; Weiss, G. Synchronverters: Inverters That Mimic Synchronous Generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, P.B.; Hansen, M.T.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Cleary, B.; Duffy, A.; Bach, B.; Vitina, A.; O’Connor, A.; Conlon, M. Estimating the electricity prices, generation costs and CO2 emissions of large scale wind energy exports from Ireland to Great Britain. Energy Policy 2016, 91, 38–48. [Google Scholar] [CrossRef]
- Smith, R. UK Future Energy Scenarios. In National Grid2014; NRC: Warwick, UK, 2013. [Google Scholar]
- Albu, M.; Calin, M.; Federenciuc, D.; Diaz, J. The measurement layer of the Virtual Synchronous Generator operation in the field test. In Proceedings of the 2011 IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Aachen, Germany, 28–30 September 2011; pp. 85–89. [Google Scholar]
- Karapanos, V.; Haan, S.W.H.; Zwetsloot, K. Testing a Virtual Synchronous Generator in a Real Time Simulated Power System. In Proceedings of the International Conference on Power Systems Transients (IPST2011), Delft, The Netherlands, 14–17 June 2011. [Google Scholar]
- Van, T.V.; Visscher, K.; Diaz, J.; Karapanos, V.; Woyte, A.; Albu, M.; Bozelie, J.; Loix, T.; Federenciuc, D. Virtual synchronous generator: An element of future grids. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenberg, Sweden, 11–13 October 2010; pp. 1–7. [Google Scholar]
- Zaman, M.S.U.; Bukhari, S.B.A.; Haider, R.; Khan, M.O.; Kim, C.H. Effects of Modified Inertia Constant and Damping Coefficient on Power System Frequency Response. Int. J. Renew. Energy Res. (IJRER) 2019, 9, 525–531. [Google Scholar]
- Ma, Y.; Cao, W.; Yang, L.; Wang, F.; Tolbert, L.M. Virtual Synchronous Generator Control of Full Converter Wind Turbines With Short-Term Energy Storage. IEEE Trans. Ind. Electron. 2017, 64, 8821–8831. [Google Scholar] [CrossRef]
- Saeed Uz Zaman, M.; Bukhari, B.S.; Hazazi, M.K.; Haider, M.Z.; Haider, R.; Kim, C.-H. Frequency Response Analysis of a Single-Area Power System with a Modified LFC Model Considering Demand Response and Virtual Inertia. Energies 2018, 11, 787. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, S.F.; Mitani, Y.; Hongesombut, K.; Küfeoğlu, S. Virtual Inertia Control-Based Model Predictive Control for Microgrid Frequency Stabilization Considering High Renewable Energy Integration. Sustainability 2017, 9, 773. [Google Scholar] [CrossRef]
- Hirase, Y.; Abe, K.; Sugimoto, K.; Sakimoto, K.; Bevrani, H.; Ise, T. A novel control approach for virtual synchronous generators to suppress frequency and voltage fluctuations in microgrids. Appl. Energy 2018, 210, 699–710. [Google Scholar] [CrossRef]
- Li, C.; Xu, J.; Zhao, C. A Coherency-Based Equivalence Method for MMC Inverters Using Virtual Synchronous Generator Control. IEEE Trans. Power Deliv. 2016, 31, 1369–1378. [Google Scholar] [CrossRef]
- Bevrani, H.; Raisch, J. On virtual inertia application in power grid frequency control. Energy Procedia 2017, 141, 681–688. [Google Scholar] [CrossRef]
- Saeed Uz Zaman, M.; Haider, R.; Bukhari, S.B.A.; Ashraf, H.M.; Kim, C.-H. Impacts of Responsive Loads and Energy Storage System on Frequency Response of a Multi-Machine Power System. Machines 2019, 7, 34. [Google Scholar] [CrossRef]
- Huang, H.; Li, F. Sensitivity analysis of load-damping characteristic in power system frequency regulation. IEEE Trans. Power Syst. 2012, 28, 1324–1335. [Google Scholar] [CrossRef]
- Pradhan, C.; Bhende, C.N. Frequency sensitivity analysis of load damping coefficient in wind farm-integrated power system. IEEE Trans. Power Syst. 2016, 32, 1016–1029. [Google Scholar]
- Huang, H.; Li, F. Sensitivity analysis of load-damping, generator inertia and governor speed characteristics in hydraulic power system frequency regulation. In Proceedings of the 2014 Australasian Universities power engineering conference (AUPEC), Perth, Australia, 28 September–1 October 2014; pp. 1–6. [Google Scholar]
- Nguyen, N.T.; Le, D.D.; Moshi, G.G.; Bovo, C.; Berizzi, A. Sensitivity analysis on locations of energy storage in power systems with wind integration. IEEE Trans. Ind. Appl. 2016, 52, 5185–5193. [Google Scholar] [CrossRef]
- Zaman, M.S.U.; Bukhari, S.B.A.; Haider, R.; Khan, M.O.; Baloch, S.; Kim, C.-H. Sensitivity and stability analysis of power system frequency response considering demand response and virtual inertia. IET Gener. Transm. Distrib. 2019. [Google Scholar] [CrossRef]
- Wang, X.; Yue, M.; Muljadi, E. PV generation enhancement with a virtual inertia emulator to provide inertial response to the grid. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 17–23. [Google Scholar]
- Hosseinipour, A.; Hojabri, H. Virtual inertia control of PV systems for dynamic performance and damping enhancement of DC microgrids with constant power loads. IET Renew. Power Gener. 2017, 12, 430–438. [Google Scholar] [CrossRef]
- Tielens, P.; Van Hertem, D. The relevance of inertia in power systems. Renew. Sustain. Energy Rev. 2016, 55, 999–1009. [Google Scholar] [CrossRef]
- Arani, M.F.M.; El-Saadany, E.F. Implementing virtual inertia in DFIG-based wind power generation. IEEE Trans. Power Syst. 2012, 28, 1373–1384. [Google Scholar] [CrossRef]
- Sondhi, S.; Hote, Y.V. Fractional order PID controller for load frequency control. Energy Convers. Manag. 2014, 85, 343–353. [Google Scholar] [CrossRef]
- Anderson, P.M.; Mirheydar, M. A low-order system frequency response model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef]
- Saadat, H. Power System Analysis; McGraw-Hill: Madison, WI, USA, 1999. [Google Scholar]
- Ogata, K. Modern Control Engineering, 5th ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Pourmousavi, S.A.; Nehrir, M.H. Introducing Dynamic Demand Response in the LFC Model. IEEE Trans. Power Syst. 2014, 29, 1562–1572. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| 0.4 | sec | |
| 0.08 | sec | |
| 0.05 | p.u. | |
| 3 | Hz/p.u. | |
| 0.015 | p.u./Hz | |
| 0.15 | p.u. sec | |
| 0.1 | ||
| Deadband in governor control | ±0.036 | Hz |
| Generation rate constraint (GRC) | ±0.1 | p.u. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeed Uz Zaman, M.; Irfan, M.; Ahmad, M.; Mazzara, M.; Kim, C.-H. Modeling the Impact of Modified Inertia Coefficient (H) due to ESS in Power System Frequency Response Analysis. Energies 2020, 13, 902. https://doi.org/10.3390/en13040902
Saeed Uz Zaman M, Irfan M, Ahmad M, Mazzara M, Kim C-H. Modeling the Impact of Modified Inertia Coefficient (H) due to ESS in Power System Frequency Response Analysis. Energies. 2020; 13(4):902. https://doi.org/10.3390/en13040902
Chicago/Turabian StyleSaeed Uz Zaman, Muhammad, Muhammad Irfan, Muhammad Ahmad, Manuel Mazzara, and Chul-Hwan Kim. 2020. "Modeling the Impact of Modified Inertia Coefficient (H) due to ESS in Power System Frequency Response Analysis" Energies 13, no. 4: 902. https://doi.org/10.3390/en13040902
APA StyleSaeed Uz Zaman, M., Irfan, M., Ahmad, M., Mazzara, M., & Kim, C.-H. (2020). Modeling the Impact of Modified Inertia Coefficient (H) due to ESS in Power System Frequency Response Analysis. Energies, 13(4), 902. https://doi.org/10.3390/en13040902