Heuristic Optimization of Virtual Inertia Control in Grid-Connected Wind Energy Conversion Systems for Frequency Support in a Restructured Environment


 , and
, and
Abstract
1. Introduction
2. Small-Signal Model of Interconnected Power System in a Restructured Environment
3. Derivative Control Strategy in Grid-connected Wind Energy Systems for Frequency Support
4. Artificial Bee Colony Optimization Algorithm
- Generate initial population of solution from Equation (19)
- Evaluate the fitness of the population using
- Using Equation (20), generate new NPs for the employed bees and evaluate the fitness
- Apply the roulette wheel selection process to choose an NP
- For the onlooker bees, calculate the probability for the solutions
- If all onlooker bees are dispersed, go to Step 9; else, go to next step
- Generate new NP for the onlooker bees and evaluate their fitness
- Apply the roulette wheel selection process
- If there is an abandoned solution for the scout bees, replace it with a new solution and evaluate its fitness
- Memorize the best solution reached so far
- Repeat Steps 1–10 for another cycle until C = MCN
5. Results and Discussion
5.1. Eigenvalue Analysis
- If all of the eigenvalues have a negative real part, the system is asymptotically stable.
- If one or more of the eigenvalues have a positive real part, the system is unstable.
5.2. Load–Frequency Analysis
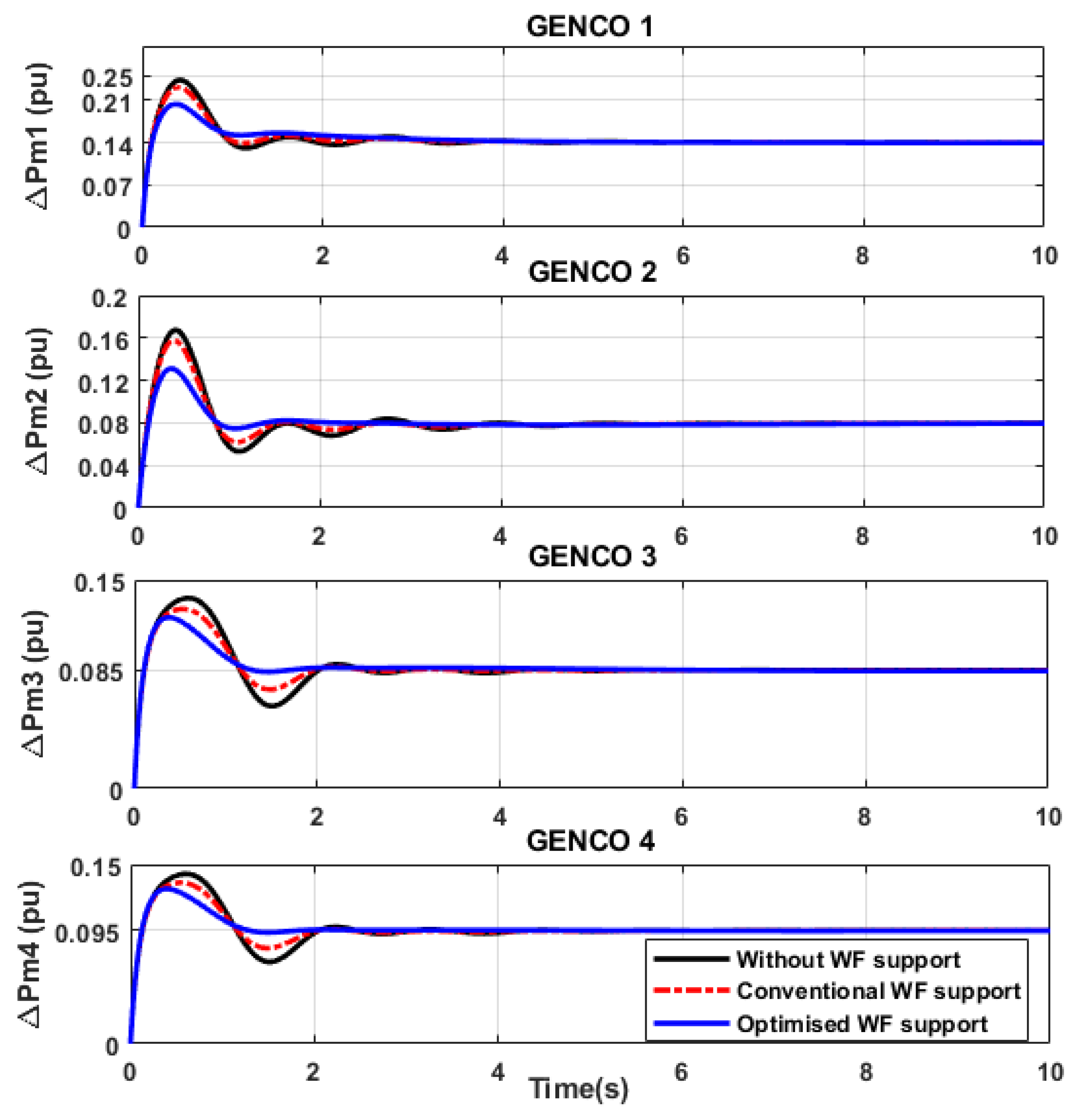
5.2.1. Scenario 1: Poolco Transaction
5.2.2. Scenario 2: Bilateral Transaction
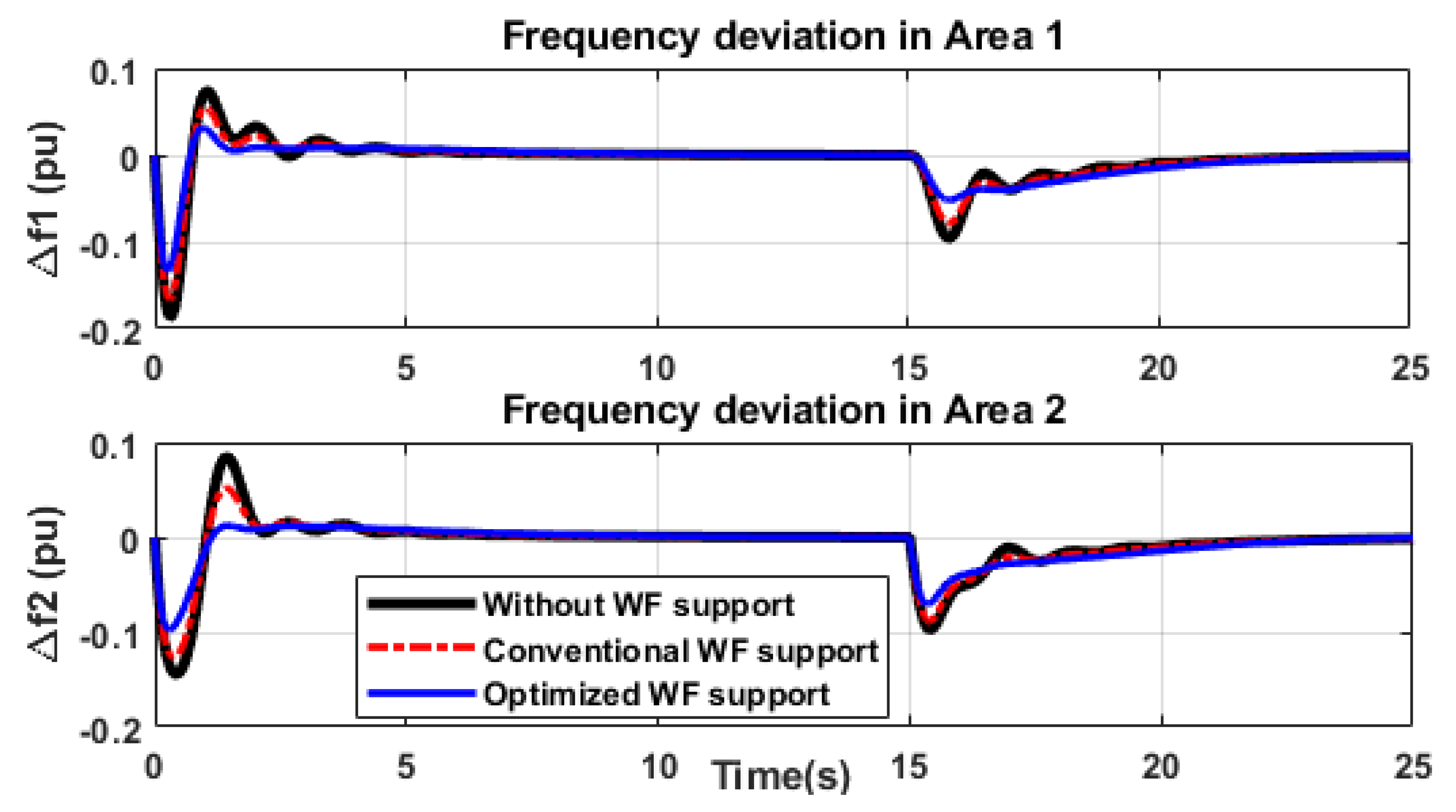
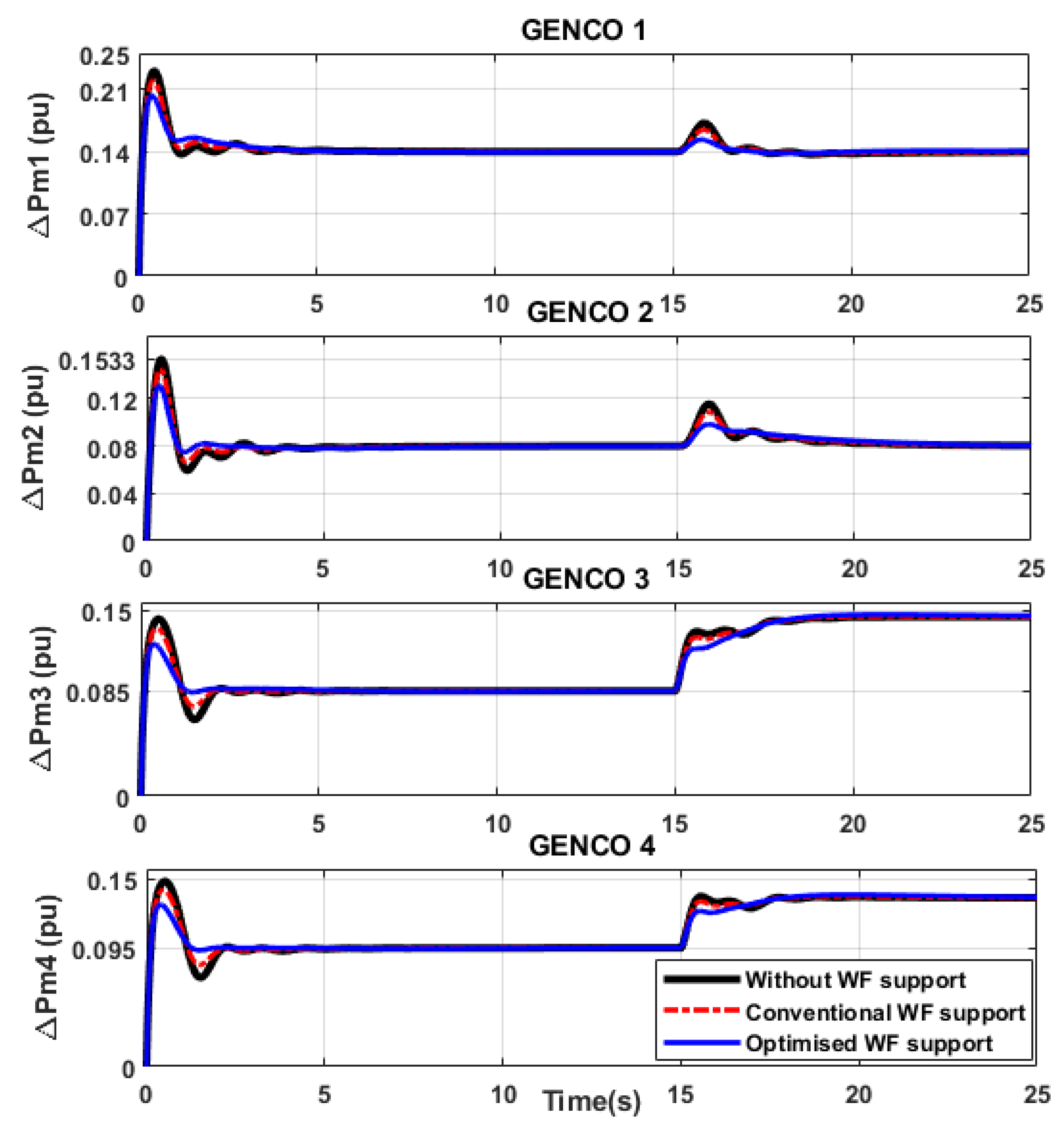
5.2.3. Scenario 3: Contract Violation
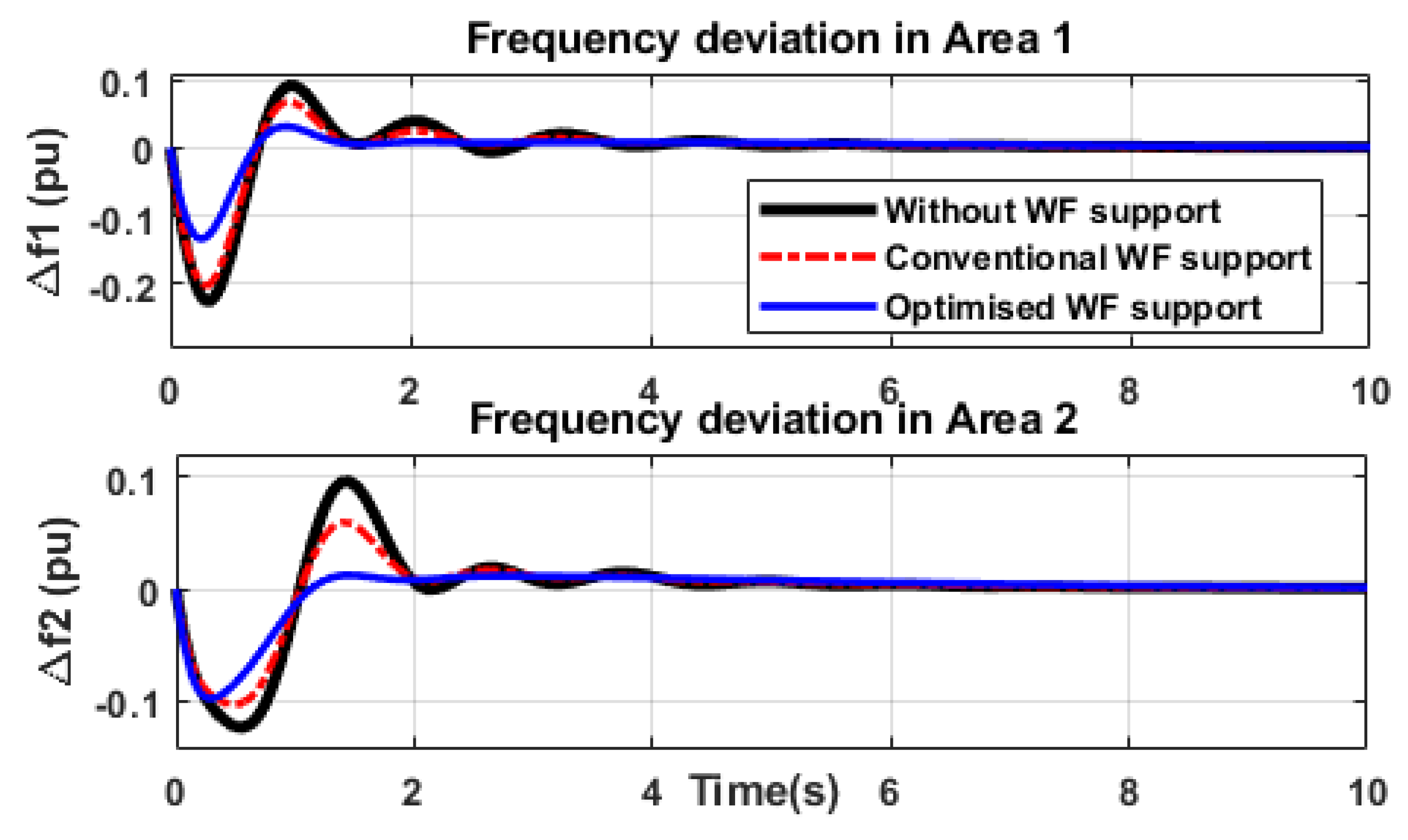
5.2.4. Scenario 4: Wind Power Fluctuation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ABC | Artificial bee Colony |
| ACE | Area control error |
| ACO | Ant colony optimization |
| AGC | Automatic gain control |
| CPM | Contract participation matrix |
| DISCO | Distribution company |
| DE | Differential Evolution |
| DFIG | Doubly fed induction generator |
| GENCO | Generation company |
| GSC | Gris side converter |
| HVAC | High voltage alternating current |
| HVDC | High voltage direct current |
| ISO | Independent system operator |
| LFC | Load frequency control |
| MPPT | Maximum power point tracking |
| MSC | Machine side converter |
| NP | Nectar position |
| PSO | Particle swarm optimization |
| REP | Renewable energy plant |
| VSG | Virtual synchronous generator |
| WECS | Wind energy conversion system |
Appendix A. Simulation Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Area 1 () | Area 2 () |
|---|---|---|
| Area participation factor, apf | 0.5, 0.5 | 0.6, 0.4 |
| Turbine time constant, (s) | 0.32, 0.3 | 0.3, 0.3 |
| Governor time constant, (s) | 0.06, 0.08 | 0.06, 0.07 |
| Droop constant, (Hz/p.u MW) | 2.4, 2.5 | 2.5, 2.7 |
| Damping coefficient, D (p.u MW/Hz) | 0.0098 | 0.0098 |
| System inertia constant, H (p.u MWs) | 0.098 | 0.1225 |
| Frequency bias factor, (p.u MW/Hz) | 0.425 | 0.396 |
| Synchronizing coefficient, | 0.245 | |
| Area control error gain, | 0.7 | 0.7 |
| Area capacity ratio, | -1 | |
| Wind turbine time constant, (s) | 1.5 | 1.5 |
| HVDC time constant, (s) | 0.2 | |
Appendix B. State Matrix
References
- Rakhshani, E.; Rodriguez, P. Active power and frequency control considering large-scale RES. In Large Scale Renewable Power Generation: Advances in Technologies for Generation, Transmission and Storage; Springer: Singapore, 2014; pp. 233–271. [Google Scholar] [CrossRef]
- Aluko, A.O. Modelling and performance analysis of doubly fed induction generator wind farm. Master’s Thesis, Durban University of Technology, Durban, South Africa, 2018. [Google Scholar]
- Aluko, A.O.; Akindeji, K. Performance analysis of grid connected scig and dfig based windfarm. In Proceedings of the 26th South African Universities Power Engineering Conference (SAUPEC), Gauteng, South Africa, 24–26 January 2018; pp. 20–25. [Google Scholar]
- Aluko, A.O.; Akindeji, K. Mitigation of Low Voltage Contingency of Doubly fed Induction Generator Wind farm using Static Synchronous Compensator in South Africa. In Proceedings of the IEEE PES/IAS PowerAfrica, Cape Town, South Africa, 28–29 June 2018; pp. 13–18. [Google Scholar]
- Lai, L.L. Power System Restructuring and Deregulation: Trading, Performance and Information Technology; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Bevrani, H. Robust Power System Frequency Control, 2nd ed.; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Arya, Y. AGC of two-area electric power systems using optimized fuzzy PID with filter plus double integral controller. J. Frankl. Inst. 2018, 355, 4583–4617. [Google Scholar] [CrossRef]
- Ashmole, P.; Battlebury, D.; Bowdler, R. Power-system model for large frequency disturbances. Proc. Inst. Electr. Eng. (IET) 1974, 121, 601–608. [Google Scholar] [CrossRef]
- Pan, C.T.; Liaw, C.M. An adaptive controller for power system load-frequency control. IEEE Trans. Power Syst. 1989, 4, 122–128. [Google Scholar] [CrossRef]
- Rakhshani, E.; Rouzbehi, K.; Sadeh, S. A new combined model for simulation of mutual effects between LFC and AVR loops. In Proceedings of the 2009 IEEE Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 28–30 March 2009; pp. 1–5. [Google Scholar]
- Doolla, S.; Bhatti, T. Load frequency control of an isolated small-hydro power plant with reduced dump load. IEEE Trans. Power Syst. 2006, 21, 1912–1919. [Google Scholar] [CrossRef]
- Kusic, G.; Sutterfield, J.; Caprez, A.; Haneline, J.; Bergman, B. Automatic generation control for hydro systems. IEEE Trans. Energy Convers. 1988, 3, 33–39. [Google Scholar] [CrossRef]
- Foord, T. Step response of a governed hydrogenerator. Proc. Inst. of Electr. Eng. (IET) 1978, 125, 1247–1248. [Google Scholar] [CrossRef]
- Concordia, C.; Kirchmayer, L. Tie-line power and frequency control of electric power systems [includes discussion]. Trans. Am. Inst. Electr. Eng. Part III Power Appar. Syst. 1953, 72, 562–572. [Google Scholar] [CrossRef]
- Concordia, C.; Kirchmayer, L. Tie-Line Power and Frequency Control of Electric Power Systems-Part II [includes discussion]. Trans. Am. Inst. Electr. Eng. Part III Power Appar. Syst. 1954, 73, 133–146. [Google Scholar] [CrossRef]
- Kocaarslan, I.; Çam, E. Fuzzy logic controller in interconnected electrical power systems for load-frequency control. Int. J. Electr. Power Energy Syst. 2005, 27, 542–549. [Google Scholar] [CrossRef]
- Hore, D. An analysis of two area load frequency control with different types of feedback controllers. Int. J. Eng. Res. Technol 2014, 3, 922–925. [Google Scholar]
- Kothari, M.; Nanda, J.; Kothari, D.; Das, D. Discrete-mode automatic generation control of a two-area reheat thermal system with new area control error. IEEE Trans. Power Syst. 1989, 4, 730–738. [Google Scholar] [CrossRef]
- Verma, R.; Pal, S.; Sathans. Intelligent automatic generation control of two-area hydrothermal power system using ANN and fuzzy logic. In Proceedings of the 2013 IEEE International Conference on Communication Systems and Network Technologies, Gwalior, India, 6–8 April 2013; pp. 552–556. [Google Scholar]
- Saikia, L.C.; Bharali, A.; Dixit, O.; Malakar, T.; Sharma, B.; Kouli, S. Automatic generation control of multi-area hydro system using classical controllers. In Proceedings of the 2012 1st International Conference on Power and Energy in NERIST (ICPEN), Nirjuli, India, 28–29 December 2012; pp. 1–6. [Google Scholar]
- Bevrani, H.; Daneshfar, F.; Daneshmand, P.R. Intelligent automatic generation control: Multi-agent Bayesian networks approach. In Proceedings of the 2010 IEEE International Symposium on Intelligent Control, Yokohama, Japan, 8–10 September 2010; pp. 773–778. [Google Scholar]
- Yousef, H.A.; Khalfan, A.K.; Albadi, M.H.; Hosseinzadeh, N. Load frequency control of a multi-area power system: An adaptive fuzzy logic approach. IEEE Trans. Power Syst. 2014, 29, 1822–1830. [Google Scholar] [CrossRef]
- Adaryani, M.R.; Afrakhte, H. NARMA-L2 controller for three-area load frequency control. In Proceedings of the IEEE 2011 19th Iranian Conference on Electrical Engineering, Tehran, Iran, 17–19 May 2011; pp. 1–6. [Google Scholar]
- Shiroei, M.; Toulabi, M.R.; Ranjbar, A.M. Robust multivariable predictive based load frequency control considering generation rate constraint. Int. J. Electr. Power Energy Syst. 2013, 46, 405–413. [Google Scholar] [CrossRef]
- Jagatheesan, K.; Anand, B.; Samanta, S.; Dey, N.; Santhi, V.; Ashour, A.S.; Balas, V.E. Application of flower pollination algorithm in load frequency control of multi-area interconnected power system with nonlinearity. Neural Comput. Appl. 2017, 28, 475–488. [Google Scholar] [CrossRef]
- Prakash, S.; Sinha, S.K. Four area Load Frequency Control of interconnected hydro-thermal power system by Intelligent PID control technique. In Proceedings of the 2012 Students Conference on Engineering and Systems, Allahabad, India, 16–18 March 2012; pp. 1–6. [Google Scholar]
- Flourentzou, N.; Agelidis, V.G.; Demetriades, G.D. VSC-based HVDC power transmission systems: An overview. IEEE Trans. Power Electron. 2009, 24, 592–602. [Google Scholar] [CrossRef]
- Al-Haiki, Z.E.; Shaikh-Nasser, A.N. Power transmission to distant offshore facilities. IEEE Trans. Ind. Appl. 2011, 47, 1180–1183. [Google Scholar] [CrossRef]
- Gemmell, B.; Dorn, J.; Retzmann, D.; Soerangr, D. Prospects of multilevel VSC technologies for power transmission. In Proceedings of the 2008 IEEE/PES Transmission and Distribution Conference and Exposition, Chicago, IL, USA, 21–24 April 2008; pp. 1–16. [Google Scholar]
- Du, C.; Agneholm, E.; Olsson, G. Use of VSC-HVDC for industrial systems having onsite generation with frequency control. IEEE Trans. Power Deliv. 2008, 23, 2233–2240. [Google Scholar] [CrossRef]
- Padiyar, K. FACTS Controllers in Power Transmission and Distribution; New Age International: New Delhi, India, 2007. [Google Scholar]
- Du, C.; Agneholm, E.; Olsson, G. Comparison of different frequency controllers for a VSC-HVDC supplied system. IEEE Trans. Power Deliv. 2008, 23, 2224–2232. [Google Scholar] [CrossRef]
- Ngamroo, I. A stabilization of frequency oscillations using a power modulation control of HVDC link in a parallel AC-DC interconnected system. In Proceedings of the Power Conversion Conference-Osaka 2002 (Cat. No. 02TH8579), Osaka, Japan, 2–5 April 2002; Volume 3, pp. 1405–1410. [Google Scholar]
- Bevrani, H. Decentralized Robust Load-frequency Control Synthesis in Restructured Power Systems. Ph.D. Thesis, Osaka University, Osaka, Japan, 2004. [Google Scholar]
- Donde, V.; Pai, M.; Hiskens, I.A. Simulation and optimization in an AGC system after deregulation. IEEE Trans. Power Syst. 2001, 16, 481–489. [Google Scholar] [CrossRef]
- Delfino, B.; Fornari, F.; Massucco, S. Load-frequency control and inadvertent interchange evaluation in restructured power systems. IEE Proc. Gener. Transm. Distrib. 2002, 149, 607–614. [Google Scholar] [CrossRef]
- Sekhar, G.C.; Sahu, R.K.; Baliarsingh, A.; Panda, S. Load frequency control of power system under deregulated environment using optimal firefly algorithm. Int. J. Electr. Power Energy Syst. 2016, 74, 195–211. [Google Scholar] [CrossRef]
- Hosseini, S.; Etemadi, A. Adaptive neuro-fuzzy inference system based automatic generation control. Electr. Power Syst. Res. 2008, 78, 1230–1239. [Google Scholar] [CrossRef]
- Parmar, K.S.; Majhi, S.; Kothari, D. LFC of an interconnected power system with multi-source power generation in deregulated power environment. Int. J. Electr. Power Energy Syst. 2014, 57, 277–286. [Google Scholar] [CrossRef]
- Torres, M.; Lopes, L.A. An optimal virtual inertia controller to support frequency regulation in autonomous diesel power systems with high penetration of renewables. In Proceedings of the International Conference on Renewable Energies and Power Quality (ICREPQ 11), Las Palmas de Gran Canaria, Spain, 13–15 April 2011; pp. 13–15. [Google Scholar]
- Meng, L.; Zafar, J.; Khadem, S.K.; Collinson, A.; Murchie, K.C.; Coffele, F.; Burt, G. Fast Frequency Response from Energy Storage Systems-A Review of Grid Standards, Projects and Technical Issues. IEEE Trans. Smart Grid 2019. [Google Scholar] [CrossRef]
- Anaya-Lara, O.; Hughes, F.; Jenkins, N.; Strbac, G. Contribution of DFIG-based wind farms to power system short-term frequency regulation. IEE Proc. Gener. Transm. Distrib. 2006, 153, 164–170. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Z.; Wong, K.P. Advanced control strategies of PMSG-based wind turbines for system inertia support. IEEE Trans. Power Syst. 2017, 32, 3027–3037. [Google Scholar] [CrossRef]
- Ekanayake, J.; Jenkins, N. Comparison of the response of doubly fed and fixed-speed induction generator wind turbines to changes in network frequency. IEEE Trans. Energy Convers. 2004, 19, 800–802. [Google Scholar] [CrossRef]
- Kanellos, F.; Hatziargyriou, N. Control of variable speed wind turbines equipped with synchronous or doubly fed induction generators supplying islanded power systems. IET Renew. Power Gener. 2009, 3, 96–108. [Google Scholar] [CrossRef]
- Rakhshani, E. Analysis and Control of Multi–Area HVDC Interconnected Power Systems by Using Virtual Inertia. Ph.D. Thesis, Universitat Politècnica De Catalunya, Barcelona, Spain, 2016. [Google Scholar]
- Aluko, A.O.; Dorrell, D.G.; Pillay-Carpanen, R.; Ojo, E.E. Frequency Control of Modern Multi-Area Power Systems Using Fuzzy Logic Controller. In Proceedings of the IEEE PES/IAS PowerAfrica, Abuja, Nigeria, 20–23 August 2019; pp. 645–649. [Google Scholar]
- Driesen, J.; Visscher, K. Virtual synchronous generators. In Proceedings of the IEEE Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–3. [Google Scholar]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.; Hansen, T.; Tonkoski, R. Virtual inertia: Current trends and future directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Chatterjee, K. Design of dual mode PI controller for load frequency control. Int. J. Emerg. Electr. Power Syst. 2011, 11. [Google Scholar] [CrossRef]
- Bevrani, H.; Hiyama, T. On load–frequency regulation with time delays: design and real-time implementation. IEEE Trans. Energy Convers. 2009, 24, 292–300. [Google Scholar] [CrossRef]
- Vrdoljak, K.; Perić, N.; Šepac, D. Optimal distribution of load-frequency control signal to hydro power plants. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 286–291. [Google Scholar]
- Ray, P.K.; Mohanty, S.R.; Kishor, N. Proportional–integral controller based small-signal analysis of hybrid distributed generation systems. Energy Convers. Manag. 2011, 52, 1943–1954. [Google Scholar] [CrossRef]
- Calovic, M. Linear regulator design for a load and frequency control. IEEE Trans. Power Appar. Syst. 1972, 6, 2271–2285. [Google Scholar] [CrossRef]
- Barcelo, W.R. Effect of power plant response on optimum load frequency control system design. IEEE Trans. Power Appar. Syst. 1973, 1, 254–258. [Google Scholar] [CrossRef]
- Bevrani, H. Robust load frequency controller in a deregulated environment: A/spl mu/-synthesis approach. In Proceedings of the 1999 IEEE International Conference on Control Applications (Cat. No. 99CH36328), Kohala Coast, HI, USA, 22–27 August 1999; Volume 1, pp. 616–621. [Google Scholar]
- Chaudhuri, B.; Pal, B.C.; Zolotas, A.C.; Jaimoukha, I.M.; Green, T.C. Mixed-sensitivity approach to H/sub/spl infin//control of power system oscillations employing multiple FACTS devices. IEEE Trans. Power Syst. 2003, 18, 1149–1156. [Google Scholar] [CrossRef]
- Rosyiana Fitri, I.; Kim, J.S.; Song, H. High-Gain Disturbance Observer-Based Robust Load Frequency Control of Power Systems with Multiple Areas. Energies 2017, 10, 595. [Google Scholar] [CrossRef]
- Karnavas, Y.; Papadopoulos, D. AGC for autonomous power system using combined intelligent techniques. Electr. Power Syst. Res. 2002, 62, 225–239. [Google Scholar] [CrossRef]
- Ibraheem; Kumar, P.; Hasan, N.; Nizamuddin. Sub-optimal automatic generation control of interconnected power system using output vector feedback control strategy. Electr. Power Compon. Syst. 2012, 40, 977–994. [Google Scholar] [CrossRef]
- Hasan, N.; Kumar, P.; others. Sub-optimal automatic generation control of interconnected power system using constrained feedback control strategy. Int. J. Electr. Power Energy Syst. 2012, 43, 295–303. [Google Scholar] [CrossRef]
- Onaolapo, A.K. Modeling and recognition of faults in smart distribution grid using machine intelligence technique. Ph.D. Thesis, Durban University of Technology, Durban, South Africa, 2018. [Google Scholar]
- Bhatti, T.; Ibraheem; Nizamuddin. AGC of two area power system interconnected by AC/DC links with diverse sources in each area. Int. J. Electr. Power Energy Syst. 2014, 55, 297–304. [Google Scholar]
- Variani, M.H.; Tomsovic, K. Distributed automatic generation control using flatness-based approach for high penetration of wind generation. IEEE Trans. Power Syst. 2013, 28, 3002–3009. [Google Scholar] [CrossRef]
- Safari, A.; Babaei, F.; Farrokhifar, M. A load frequency control using a PSO-based ANN for micro-grids in the presence of electric vehicles. Int. J. Ambient Energy 2019, 1–13. [Google Scholar] [CrossRef]
- Khooban, M.H. Secondary load frequency control of time-delay stand-alone microgrids with electric vehicles. IEEE Trans. Ind. Electron. 2017, 65, 7416–7422. [Google Scholar] [CrossRef]
- Xi, J.; Geng, H.; Yang, G. Adaptive VSG Control of PMSG based WECS for Grid Frequency Response. In Proceedings of the IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–5. [Google Scholar]
- Sharma, G.; Nasiruddin, I.; Niazi, K.; Bansal, R. Automatic Generation Control (AGC) of Wind Power System: An Least Squares-Support Vector Machine (LS-SVM) Radial Basis Function (RBF) Kernel Approach. Electr. Power Compon. Syst. 2018, 46, 1621–1633. [Google Scholar] [CrossRef]
- Sahu, R.K.; Sekhar, G.C.; Panda, S. DE optimized fuzzy PID controller with derivative filter for LFC of multi source power system in deregulated environment. Ain Shams Eng. J. 2015, 6, 511–530. [Google Scholar] [CrossRef]
- Alhelou, H.H.; Hamedani-Golshan, M.E.; Zamani, R.; Heydarian-Forushani, E.; Siano, P. Challenges and opportunities of load frequency control in conventional, modern and future smart power systems: A comprehensive review. Energies 2018, 11, 2497. [Google Scholar] [CrossRef]
- Rodriguez, P.; Candela, I.; Luna, A. Control of PV generation systems using the synchronous power controller. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 993–998. [Google Scholar] [CrossRef]
- Ayan, K.; Kılıç, U. Artificial bee colony algorithm solution for optimal reactive power flow. Appl. Soft Comput. 2012, 12, 1477–1482. [Google Scholar] [CrossRef]
- Karaboga, D.; Gorkemli, B.; Ozturk, C.; Karaboga, N. A comprehensive survey: artificial bee colony (ABC) algorithm and applications. Artif. Intell. Rev. 2014, 42, 21–57. [Google Scholar] [CrossRef]
- Sumpavakup, C.; Srikun, I.; Chusanapiputt, S. A solution to the optimal power flow using artificial bee colony algorithm. In Proceedings of the IEEE International Conference on Power System Technology, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–5. [Google Scholar]
- Gozde, H.; Taplamacioglu, M.C.; Kocaarslan, I. Comparative performance analysis of Artificial Bee Colony algorithm in automatic generation control for interconnected reheat thermal power system. Int. J. Electr. Power Energy Syst. 2012, 42, 167–178. [Google Scholar] [CrossRef]
- Karaboga, D.; Akay, B. A survey: algorithms simulating bee swarm intelligence. Artif. Intell. Rev. 2009, 31, 61–85. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. On the performance of artificial bee colony (ABC) algorithm. Appl. Soft Comput. 2008, 8, 687–697. [Google Scholar] [CrossRef]
- Benyoucef, A.s.; Chouder, A.; Kara, K.; Silvestre, S.; sahed, O.A. Artificial bee colony based algorithm for maximum power point tracking (MPPT) for PV systems operating under partial shaded conditions. Appl. Soft Comput. 2015, 32, 38–48. [Google Scholar] [CrossRef]
- Abu-Mouti, F.S.; El-Hawary, M.E. Optimal Distributed Generation Allocation and Sizing in Distribution Systems via Artificial Bee Colony Algorithm. IEEE Trans. Power Deliv. 2011, 26, 2090–2101. [Google Scholar] [CrossRef]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994; Volume 7. [Google Scholar]
- Inoue, T.; Amano, H. A thermal power plant model for dynamic simulation of load frequency control. In Proceedings of the 2006 IEEE PES Power Systems Conference and Exposition, Atlanta, GA, USA, 29 October–1 November 2006; pp. 1442–1447. [Google Scholar]
- Bhatt, P.; Roy, R.; Ghoshal, S. Optimized multi area AGC simulation in restructured power systems. Int. J. Electr. Power Energy Syst. 2010, 32, 311–322. [Google Scholar] [CrossRef]
- Abraham, R.J.; Das, D.; Patra, A. Load following in a bilateral market with local controllers. Int. J. Electr. Power Energy Syst. 2011, 33, 1648–1657. [Google Scholar] [CrossRef]
- Tan, W.; Zhang, H.; Yu, M. Decentralized load frequency control in deregulated environments. Int. J. Electr. Power Energy Syst. 2012, 41, 16–26. [Google Scholar] [CrossRef]
- Sewchurran, S.; Davidson, I.E. Introduction to the South African Renewable Energy Grid Code version 2.9 requirements (Part II—Grid code technical requirements). In Proceedings of the2017 IEEE AFRICON, Cape Town, South Africa, 18–20 September 2017; pp. 1225–1230. [Google Scholar]
- Kerdphol, T.; Rahman, F.; Mitani, Y. Virtual inertia control application to enhance frequency stability of interconnected power systems with high renewable energy penetration. Energies 2018, 11, 981. [Google Scholar] [CrossRef]
- Al-Toma, A.S.H. Hybrid Control Schemes for Permanent Magnet Synchronous Generator Wind Turbines. Ph.D. Thesis, Brunel University London, London, UK, 2017. [Google Scholar]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Report; Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Bao, L.; Zeng, J.C. Comparison and analysis of the selection mechanism in the artificial bee colony algorithm. In Proceedings of the IEEE Ninth International Conference on Hybrid Intelligent Systems, Shenyang, China, 12–14 August 2009; Volume 1, pp. 411–416. [Google Scholar]
- Burns, R. Advanced Control Engineering; Butterworth-Heinemann: Oxford, UK, 2001. [Google Scholar]





















| Parameter | Value |
|---|---|
| Maximum cycle number (MCN) | 300 |
| Colony size (CS) | 200 |
| Number of employed bees | 100 |
| Number of design variables (V) | 2 |
| Limit |
| Mode | No WF Support | With WF Support (Conventional) | With WF Support (Optimized) |
|---|---|---|---|
| −17.1457 | −17.1558 | −17.2131 | |
| −17.0903 | −17.0886 | −17.1309 | |
| −13.0917 | −13.0257 | −13.0843 | |
| −14.6662 | −14.6012 | −14.6278 | |
| −0.1780 + j4.7456 | −0.7186 + j5.2526 | −1.6315 + j5.2273 | |
| −0.1780 − j4.7456 | −0.7186 − j5.2526 | −1.6315 − j5.2273 | |
| −0.9682 + j3.0929 | −1.3347 + j3.0070 | −2.2055 + j3.2540 | |
| −0.9682 − j3.0929 | −1.3347−j3.0070 | −2.2055 − j3.2540 | |
| −0.4172 | −0.9282 + j0.6974 | −0.8046 + j0.8489 | |
| −1.2326 + j0.4645 | −0.9282 − j0.6974 | −0.8046 − j0.8489 | |
| −1.2326 − j0.4645 | −0.4723 + j0.1527 | −0.3370 + j0.2541 | |
| −2.9151 | −0.4723 − j0.1527 | −0.3370 − j0.2541 | |
| −3.2156 | −0.6382 | −0.5834 | |
| −3.2314 | −3.0310 | −3.0355 | |
| ———- | −3.2264 + j0.0034 | −3.2258 + j0.0033 | |
| ———- | −3.2264 − j0.0034 | −3.2258 − j0.0033 |
| Parameter | No WF Support | With WF Support (Conventional) | With WF Support (Optimized) |
|---|---|---|---|
| Total Damping | 76.4590 | 78. 9008 | 82.08 37 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aluko, A.O.; Dorrell, D.G.; Pillay Carpanen, R.; Ojo, E.E. Heuristic Optimization of Virtual Inertia Control in Grid-Connected Wind Energy Conversion Systems for Frequency Support in a Restructured Environment. Energies 2020, 13, 564. https://doi.org/10.3390/en13030564
Aluko AO, Dorrell DG, Pillay Carpanen R, Ojo EE. Heuristic Optimization of Virtual Inertia Control in Grid-Connected Wind Energy Conversion Systems for Frequency Support in a Restructured Environment. Energies. 2020; 13(3):564. https://doi.org/10.3390/en13030564
Chicago/Turabian StyleAluko, Anuoluwapo Oluwatobiloba, David George Dorrell, Rudiren Pillay Carpanen, and Evan E. Ojo. 2020. "Heuristic Optimization of Virtual Inertia Control in Grid-Connected Wind Energy Conversion Systems for Frequency Support in a Restructured Environment" Energies 13, no. 3: 564. https://doi.org/10.3390/en13030564
APA StyleAluko, A. O., Dorrell, D. G., Pillay Carpanen, R., & Ojo, E. E. (2020). Heuristic Optimization of Virtual Inertia Control in Grid-Connected Wind Energy Conversion Systems for Frequency Support in a Restructured Environment. Energies, 13(3), 564. https://doi.org/10.3390/en13030564