Three-Dimensional Streamline Tracing Method over Tetrahedral Domains



Abstract
1. Introduction
- (1)
- During the process of streamline tracing, only the coordinate and velocity vector on the vertex are acquired. Neither flux on element facets nor the flux conservation within an element need to be considered.
- (2)
- For any given coordinate of an entrance point in an unstructured tetrahedron element, the corresponding exit coordinate can be determined.
- (3)
- The time of flight can be calculated accurately and efficiently because the analytical solution that could describe the pathway of a particle in an unstructured tetrahedron element is deduced.
2. Mathematics Fundamentals for Tracing Streamlines over Tetrahedron Grid System
2.1. Fundamentals of Shape Function
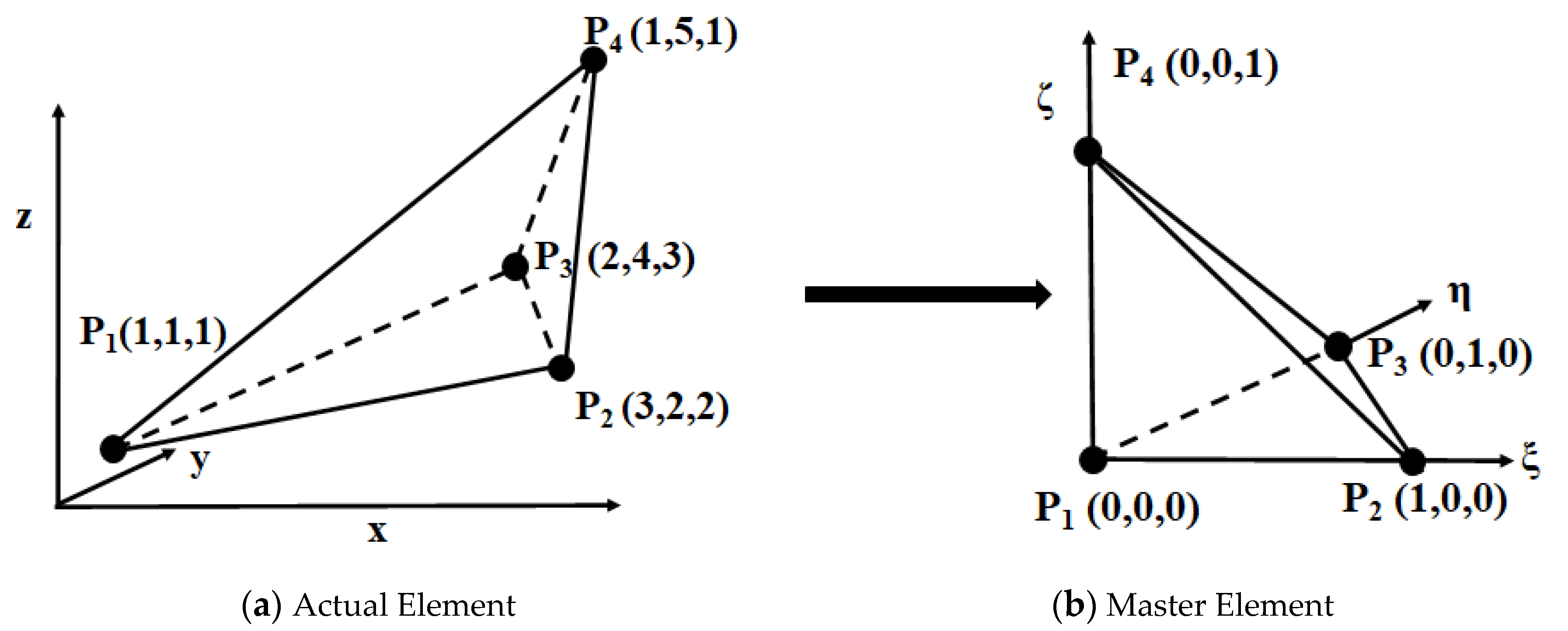
2.2. Transformation Formulation of Coordinates and Velocity Vectors between Actual and Mater Element
2.3. The Analytical Solution for Describing the Trajectory in Master Element
2.4. Computing the TOF and Exit Coordinate
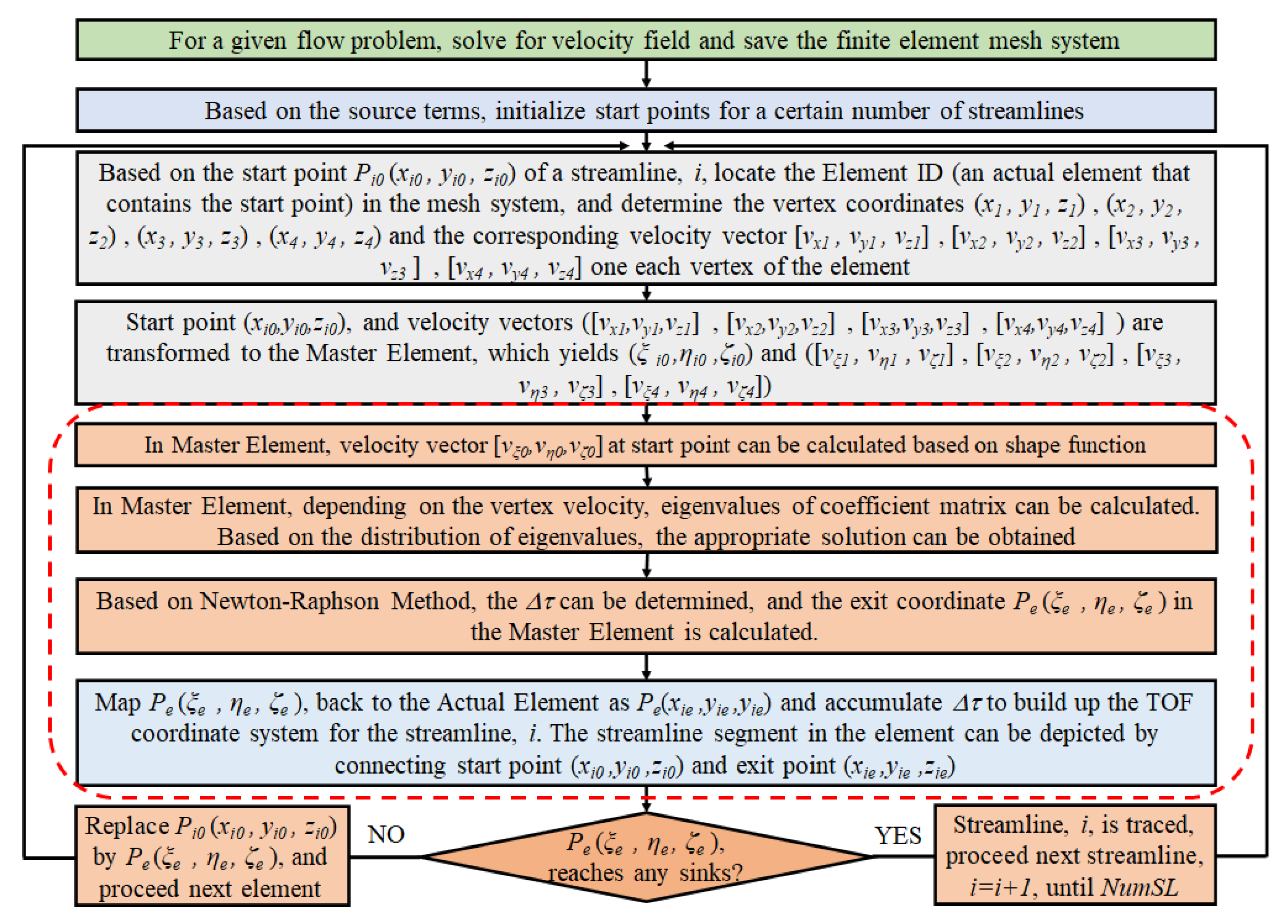
3. The Method to Trace Streamlines over Tetrahedron Grid Created by FEM
- (1)
- Import a tetrahedron mesh system created by FEM and the velocity field.
- (2)
- Give a start point P0 in the x-y-z plane (Actual Element); then, find the cell where the start point is located, and obtain these element properties such as the coordinates on each vertex of the cell and the corresponding velocity vector.
- (3)
- Transform the coordinates and velocity vectors at four vertexes of the tetrahedron element.
- (4)
- Convert start point properties (such as velocity vector and coordinate) to the Master Element (ξ-η-ζ plane).
- (5)
- Trace a streamline in the tetrahedron element and determine the exit point Pe* coordinate and time (TOF) spent from start point to exit point in the Master Element.
- (6)
- Map the exit point coordinate Pe* (ξe, ηe, ζe) in Master Element back to Actual Element as Pe (xe, ye, ze) and accumulate Δτ to construct the TOF coordinate system;
- (7)
- Check whether the exit point Pe reaches a sink or not. If yes, it means this streamline is traced successfully, and stop tracing this streamline. If does not reach, replace the start point P0 by using the calculated exit point Pe and repeat Steps 2–7.
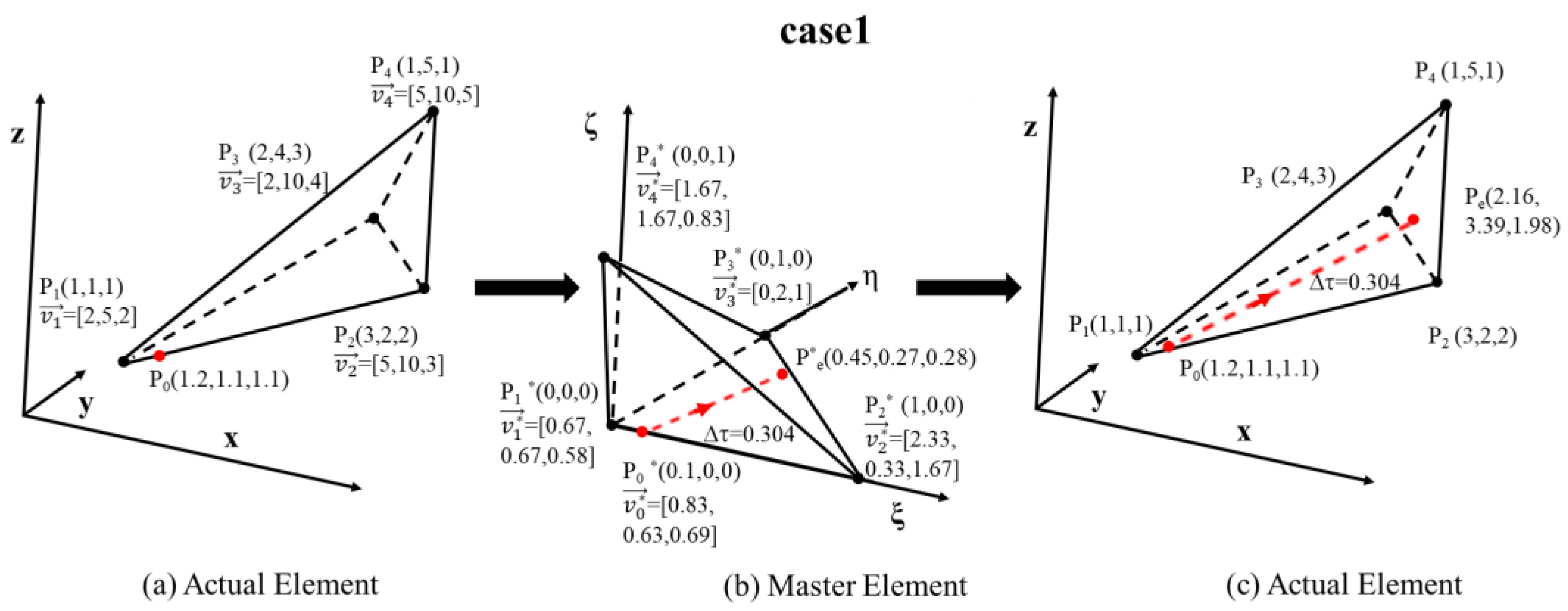
3.1. Tracing Streamline over a Tetrahedron Element
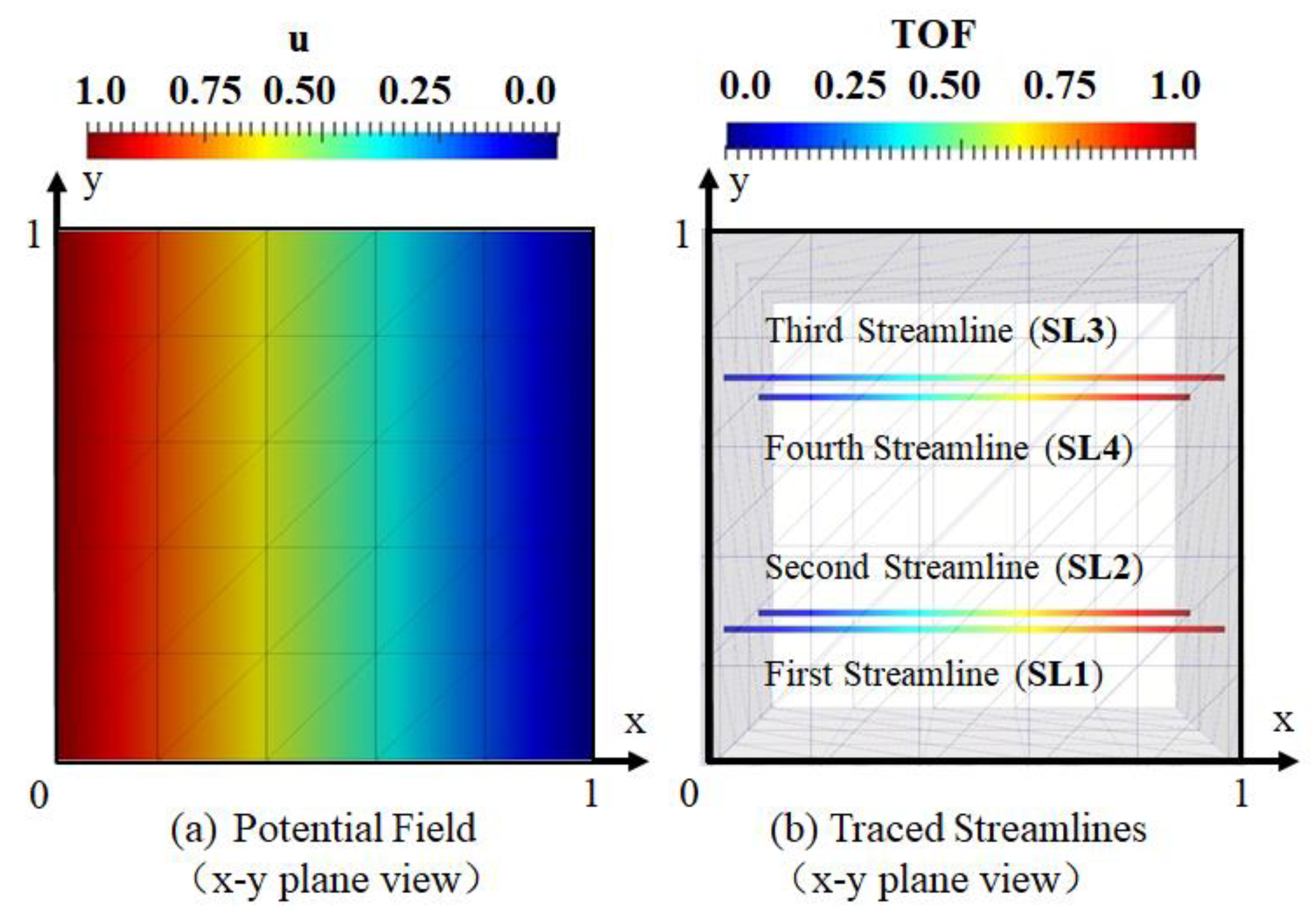
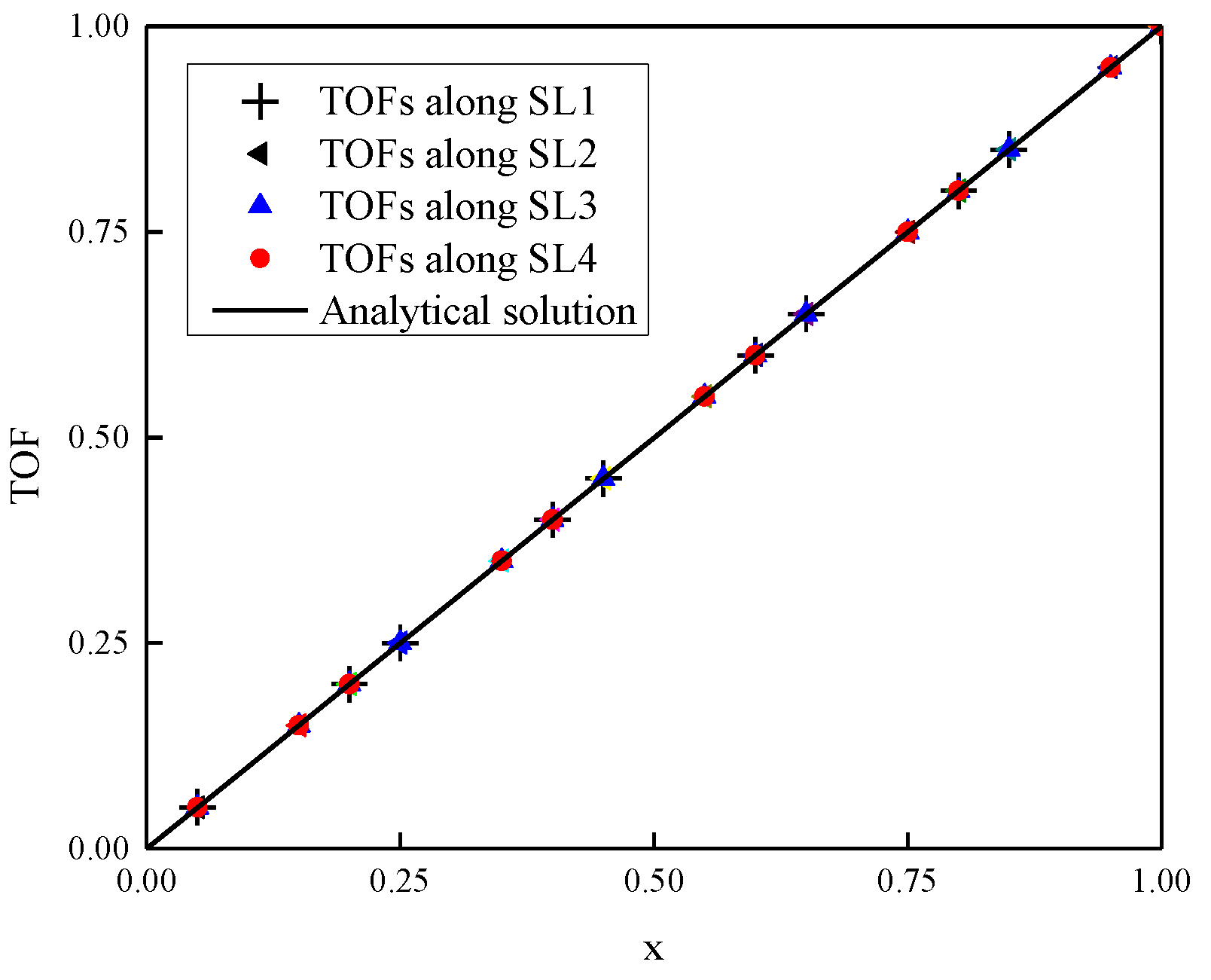
3.2. Tracing Streamline over the Whole Domain
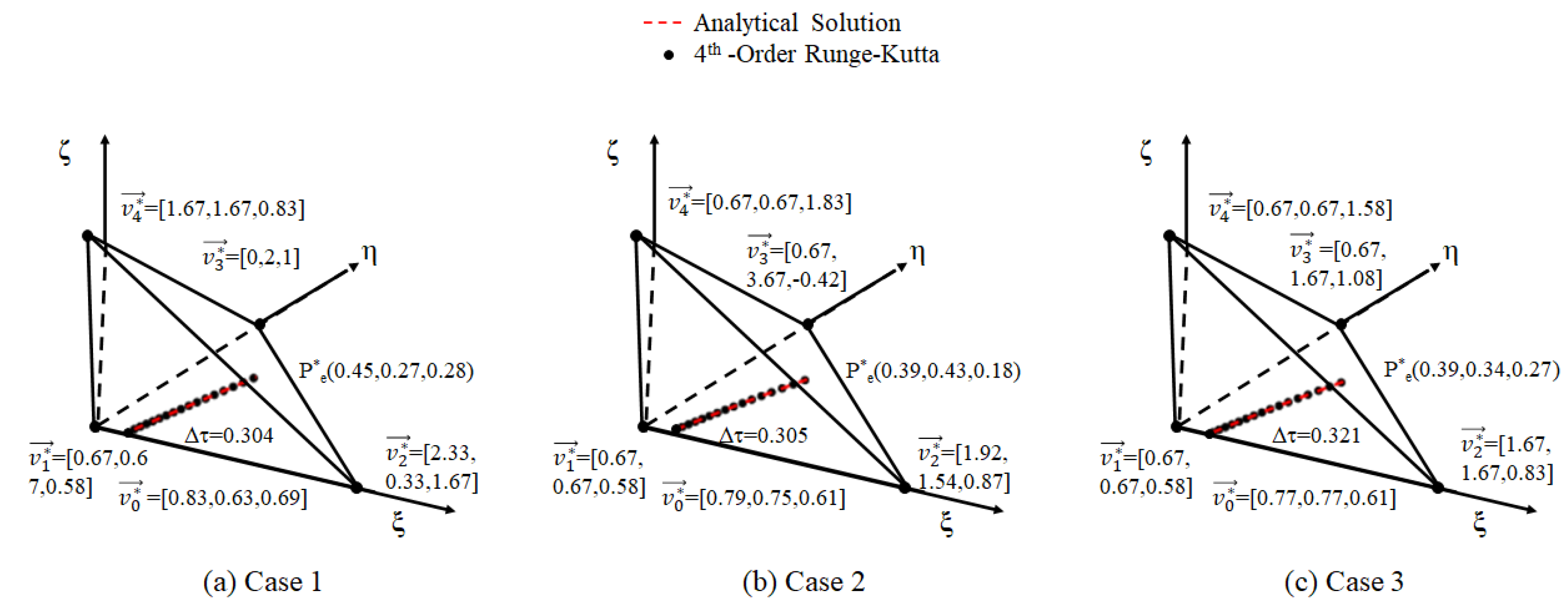
4. Results and Discussion
4.1. Case 1
4.2. Case 2
4.3. Case 3
5. Conclusions
- (1)
- The exit coordinate leaving a tetrahedral element and the Time of Flight (TOF) could be computed accurately and efficiently because the analytical solution that could depict the trajectory in Master Element is deduced.
- (2)
- Two verification cases are studied, whose results are agreeing to the new method to trace streamlines over unstructured tetrahedron elements based on vertex velocities. One of the verifications verifies the analytical solution for depicting the trajectory in Master Element by comparing it with the results of the RK4 method, while the other one verifies the process of tracing streamlines in the entire domain.
- (3)
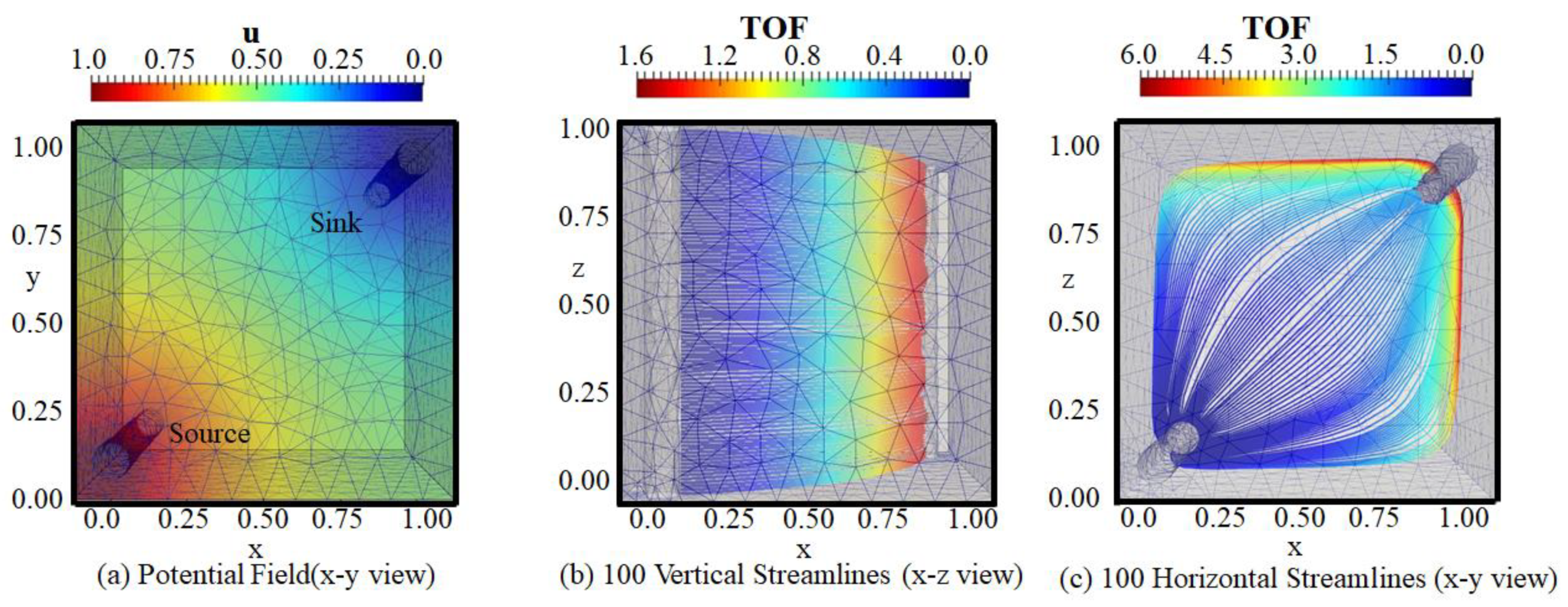
- Two cases with different geometric complexity are studied to demonstrate the computational power of the method presented in this paper. The new method to trace streamlines over unstructured tetrahedron elements is a robust method that can handle a complex computational domain.
- (4)
- The presented method is implemented in FEniCS, which is a programming framework for Finite Element Method (FEM) that can be easily extend the method to other research fields. If the velocity field and tetrahedron mesh system are obtained during any fluid field solving in FEniCS, the new method can trace the streamlines of this fluid field, which can easily extend the method to other research fields.
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
References
- Gautier, Y.; Noetinger, B.; Roggero, F. History Matching Using a Streamline-Based Approach and Gradual Deformation. SPE J. 2004, 9, 88–101. [Google Scholar] [CrossRef]
- Singh, A.P.; Knabe, S.P.; Maucec, M. History Matching Using Streamline Trajectories. In Proceedings of the Abu Dhabi International Petroleum Exhibition & Conference, Abu Dhabi, UAE, 10–13 November 2013; Society of Petroleum Engineers (SPE): London, UK, 2014; pp. 10–13. [Google Scholar]
- Ramirez, W.F. Application of Optimal Control Theory to Enhanced Recovery; Development of Petroleum Science series; Elsevier Science: New York, NY, USA, 1987; Volume 21. [Google Scholar]
- Siavashi, M.; Tehrani, M.R.; Nakhaee, A. Efficient Particle Swarm Optimization of Well Placement to Enhance Oil Recovery Using a Novel Streamline-Based Objective Function. J. Energy Resour. Technol. 2016, 138, 052903. [Google Scholar] [CrossRef]
- Zhu, Z.; Gerritsen, M.; Thiele, M. Thermal Streamline Simulation for Hot Waterflooding. SPE Reserv. Eval. Eng. 2010, 13, 372–382. [Google Scholar] [CrossRef]
- Wen, T.; Thiele, M.R.; Ciaurri, D.E.; Aziz, K.; Ye, Y. Waterflood management using two-stage optimization with streamline simulation. Comput. Geosci. 2014, 18, 483–504. [Google Scholar] [CrossRef]
- Batycky, R.P. A Three-Dimensional Two-Phase Field Scale Streamline Simulator. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1997. [Google Scholar]
- Alsofi, A.M.; Blunt, M.J. Streamline-Based Simulation of non-Newtonian Poly Flooding. SPE J. 2010, 15, 895–905. [Google Scholar] [CrossRef]
- Huang, W.; di Donato, G.; Blunt, M.J. Comparison of streamline-based and grid-based dual porosity simulation. J. Pet. Sci. Eng. 2004, 43, 129–137. [Google Scholar] [CrossRef]
- Park, C.; Kang, J.M.; Jung, Y.; Kim, S. Streamline-based simulation to investigate interwell connectivity and tracer transport in 3D discrete fractured reservoir. In Proceedings of the SPE Europec/EAGE Annual Conference and Exhibition, Vienna, Austria, 12–15 June 2006. [Google Scholar]
- Atchley, A.L.; Maxwell, R.M.; Navarre-Sitchler, A.K. Using streamlines to simulate stochastic reactive transport in heterogeneous aquifers: Kinetic metal release and transport in CO2 impacted drinking water aquifers. Adv. Water Resour. 2013, 52, 93–106. [Google Scholar] [CrossRef]
- Qi, R.; la Force, T.; Blunt, M.J. A three-phase four-component streamline-based simulator to study carbon dioxide storage. Comput. Geosci. 2009, 13, 493–509. [Google Scholar] [CrossRef]
- Crane, M.J.; Blunt, M.J. Streamline-based simulation of solute transport. Water Resour. Res. 1999, 35, 3061–3078. [Google Scholar] [CrossRef]
- Maxwell, R.M.; Welty, C.; Tompson, A.F.B. Streamline-based simulation of virus transport resulting from long term artificial recharge in a heterogeneous aquifer. Adv. Water Resour. 2003, 26, 1075–1096. [Google Scholar] [CrossRef]
- Di Donato, G.; Blunt, M.J. Streamline-based dual-porosity simulation of reactive transport and flow in fractured reservoirs. Water Resour. Res. 2004, 40, 1–12. [Google Scholar] [CrossRef]
- Obi, E.-O.; Blunt, M.J. Streamline-based simulation of advective–dispersive solute transport. Adv. Water Resour. 2004, 27, 913–924. [Google Scholar] [CrossRef]
- Herrera, P.A.; Valocchi, A.J.; Beckie, R.D. A multidimensional streamline-based method to simulate reactive solute transport in heterogeneous porous media. Adv. Water Resour. 2010, 33, 711–727. [Google Scholar] [CrossRef]
- Batycky, R.P.; Thiele, M.R. Technology Update: Mature Flood Surveillance Using Streamlines. J. Pet. Technol. 2016, 68, 22–25. [Google Scholar] [CrossRef]
- Zefreh, M.G.; Nilsen, H.M.; Lie, K.; Raynaud, X.; Doster, F. Streamline simulation of a reactive advective flow with discontinuous flux function. Comput. Geosci. 2018, 23, 255–271. [Google Scholar] [CrossRef]
- Caudle, B.H. Fundamentals of Reservoir Engineering; Society of Petroleum: Richardson, TX, USA, 1967. [Google Scholar]
- Collins, R.E. Japanese research in flow of fluids through porous materials and filtration. Trans. Am. Geophys. Union 1964, 45, 151–164. [Google Scholar] [CrossRef]
- Lin, J.K. An Image well Method for Bounding Arbitrary Reservoir Shapes in the Streamline Model. Ph.D. Thesis, University of Texas at Austin, Austin, TX, USA, 1972. [Google Scholar]
- Thiele, M.R. Modeling Multiphase Flow in Heterogeneous Media Using Streamtubes. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1994. [Google Scholar]
- Datta-Gupta, A.; King, M.J. A semi analytical approach to tracer flow modeling in heterogeneous permeable media. Adv. Water Res. 1995, 18, 9–29. [Google Scholar] [CrossRef]
- Thiele, M.R. Streamline simulation. In 6th International Forum on Reservoir Simulation; Schloss Fuschl: Salzburg, Austria, 2001. [Google Scholar]
- Datta-Gupta, A.; King, M.J. Streamline Simulation: Theory and Practice; Society of Petroleum Engineering: Houston, TX, USA, 2007. [Google Scholar]
- Hægland, H.; Dahle, H.; Eigestad, G.; Lie, K.-A.; Aavatsmark, I. Improved streamlines and time-of-flight for streamline simulation on irregular grids. Adv. Water Resour. 2007, 30, 1027–1045. [Google Scholar] [CrossRef]
- Numbere, D.T. A General Streamline Modeling Technique for Homogeneous Porous with Application to Streamflood Prediction. Ph.D. Thesis, University of Oklahoma, Norman, OK, USA, 1982. [Google Scholar]
- Pollock, D.W. Semianalytical Computation of Path Lines for Finite-Difference Models. Ground Water 1988, 26, 743–750. [Google Scholar] [CrossRef]
- Prévost, M.; Edwards, M.G.; Blunt, M.J. Streamline Tracing on Curvilinear Structured and Unstructured Grids. SPE J. 2002, 7, 139–148. [Google Scholar] [CrossRef]
- Juanes, R.; Matringe, S.F. Unified formulation for highorder streamline tracing on two-dimensinal unstructured grids. J. Sci. Comput. 2008, 38, 50–73. [Google Scholar] [CrossRef]
- Zhang, Y.; King, M.J.; Datta-Gupta, A. Robust streamline tracing using inter-cell fluxes in locally refined and unstructured grids. Water Resour. Res. 2012, 48, 1–19. [Google Scholar] [CrossRef]
- Siavashi, M.; Blunt, M.J.; Raisee, M.; Pourafshary, P. Three-dimensional streamline-based simulation of non-isothermal two-phase flow in heterogeneous porous media. Comput. Fluids 2014, 103, 116–131. [Google Scholar] [CrossRef]
- Zuo, L.; Lim, J.; Chen, R.; King, M. Efficient Calculation of Flux Conservative Streamline Trajectories on Complex and Unstructured Grids. In Proceedings of the 78th EAGE Conference and Exhibition 2016, Vienna, Austria, 30 May–2 June 2016; EAGE Publications: Vienna, Austria. [Google Scholar]
- Vasco, D.W.; Pride, S.R.; Zahasky, C.; Benson, S.M. Calculating Trajectories Associated with Solute Transport in a Heterogeneous Medium. Water Resour. Res. 2018, 54, 6890–6908. [Google Scholar] [CrossRef]
- Wang, B.; Feng, Y.; Du, J.; Wang, Y.; Wang, S.; Yang, R. An Embedded Grid-Free Approach for Near-Wellbore Streamline Simulation. SPE J. 2018, 23, 567–588. [Google Scholar] [CrossRef]
- Cordes, C.; Kinzelbach, W. Continuous groundwater velocity fields and path lines in linear, bilinear, and trilinear finite element. Water Resour. Res. 1992, 28, 2903–2911. [Google Scholar] [CrossRef]
- Ham, D.A.; Pietrzak, J.; Stelling, G.S. A streamline tracking algorithm for semi-Lagrangian advection schemes based on the analytic integration of the velocity field. J. Comput. Appl. Math. 2006, 192, 168–174. [Google Scholar] [CrossRef]
- Matringe, S.F.; Juanes, R.; Tchelepi, H.A. Streamline Tracing on General Triangular or Quadrilateral Grids. SPE J. 2007, 12, 217–233. [Google Scholar] [CrossRef]
- Park, C.; Kang, J.M. Characterization of Tracer Transport in Heterogeneous Fractured Reservoir by a Streamline Approach on Unstructured Grids. Energy Sources 2008, 30, 856–871. [Google Scholar] [CrossRef]
- Klausen, R.A.; Rasmussen, A.F.; Stephansen, A.F. Velocity interpolation and streamline tracing on irregular geometries. Comput. Geosci. 2011, 16, 261–276. [Google Scholar] [CrossRef]
- Painter, S.L.; Gable, C.W.; Kelkar, S. Pathline tracing on fully unstructured control-volume grids. Comput. Geosci. 2012, 16, 1125–1134. [Google Scholar] [CrossRef]
- Hao, J.; Wang, W.; Duo, Z. An efficient algorithm for streamline visualization in unstructured steady vector field. In Proceedings of the 2nd International Conference on Computer Science and Application Engineering, Hohhot, China, 22–24 October 2018. [Google Scholar]
- Yin, F.; Erxiu, S.; Yi, L.; Bin, W.; Liehui, Z.; Yulong, Z. Implementation of streamline simulation based on finite element method in FEniCS. Comput. Geosci. 2019, 24, 1–5. [Google Scholar]
- Bonduà, S.; Bortolotti, V. A tool for pathline creation using TOUGH simulation results and fully unstructured 3D Voronoi grids. Environ. Model. Softw. 2019, 115, 63–75. [Google Scholar] [CrossRef]
- Craig, J.; Ramadhan, M.; Muffels, C. A Particle Tracking Algorithm for Arbitrary Unstructured Grids. Ground Water 2019, 58, 19–26. [Google Scholar] [CrossRef] [PubMed]
- Batista, D. Mesh-independent streamline tracing. J. Comput. Phys. 2020, 401, 108967. [Google Scholar] [CrossRef]
- Gregory, M.N.; II-Hong, J. Tools for computing tangent curves for linearly baring vector fields over tetrahedral domains. IEEE Trans. Vis. Comput. Graph. 1999, 5, 360–372. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | TOF Calculated by Analytical Solution | TOF Calculated by RK4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Δt = 0.01 s | Δt = 0.001 s | Δt = 0.0001 s | ||||||||
| TOF (s) | TOF (s) | Error (%) | Number of Iterations | TOF (s) | Error (%) | Number of Iterations | TOF (s) | Error (%) | Number of Iterations | |
| Case 1 | 0.30432 | 0.3 | 1.42 | 450 | 0.304 | 0.105 | 4560 | 0.3043 | 0.007 | 45645 |
| Case 2 | 0.30525 | 0.31 | −1.556 | 465 | 0.305 | 0.082 | 4575 | 0.3051 | 0.049 | 45765 |
| Case 3 | 0.32123 | 0.32 | 0.383 | 480 | 0.321 | 0.072 | 4815 | 0.3212 | 0.009 | 48180 |
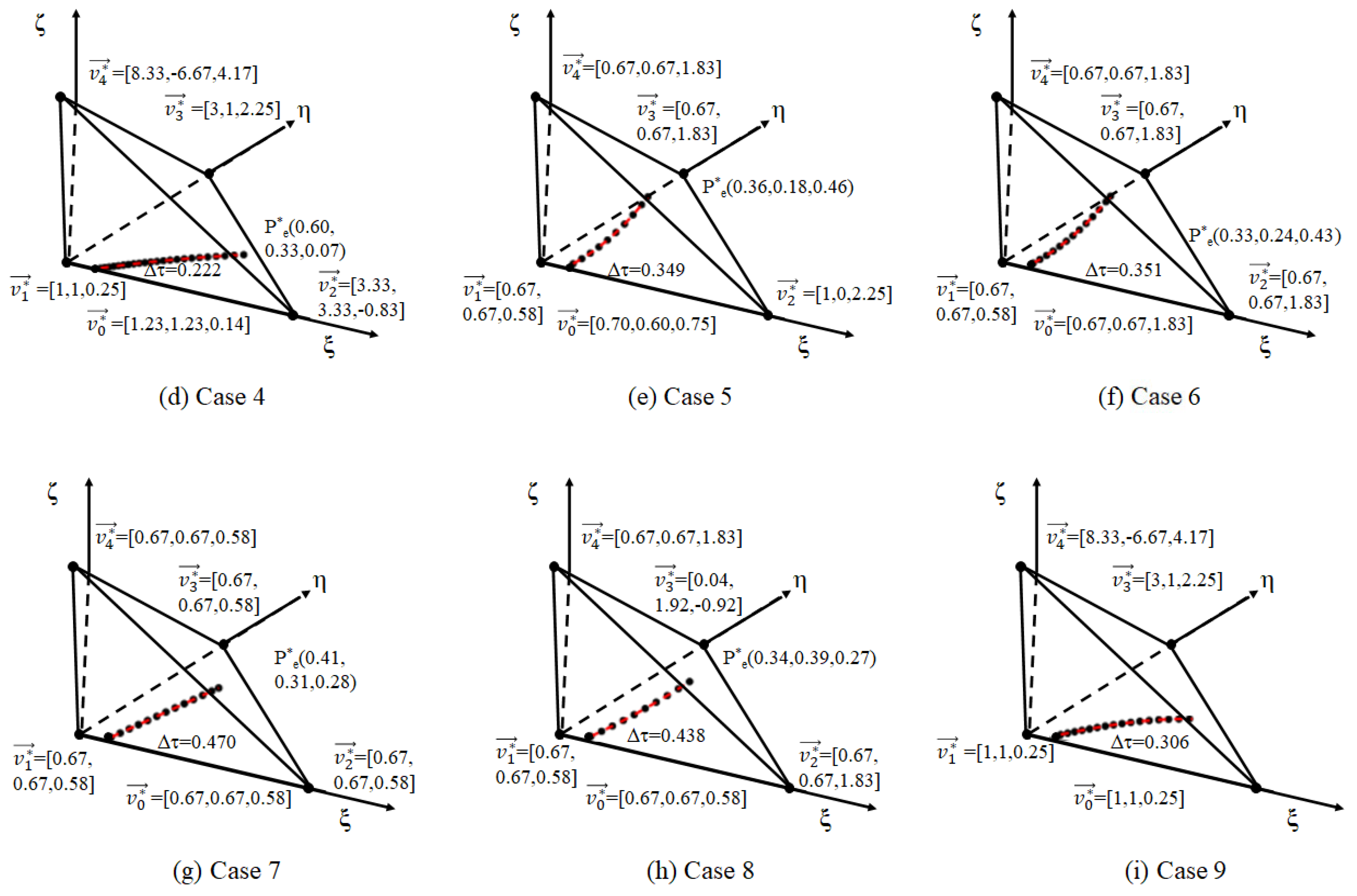
| Case 4 | 0.2214 | 0.22 | 0.632 | 330 | 0.221 | 0.181 | 3330 | 0.2213 | 0.045 | 33195 |
| Case 5 | 0.34923 | 0.35 | −0.22 | 375 | 0.349 | 0.066 | 5235 | 0.3491 | 0.037 | 52365 |
| Case 6 | 0.35111 | 0.35 | 0.316 | 525 | 0.351 | 0.031 | 5265 | 0.3511 | 0.003 | 52665 |
| Case 7 | 0.46956 | 0.47 | −0.094 | 705 | 0.469 | 0.119 | 7035 | 0.4695 | 0.013 | 70425 |
| Case 8 | 0.43823 | 0.44 | −0.404 | 660 | 0.438 | 0.052 | 6570 | 0.4382 | 0.007 | 64920 |
| Case 9 | 0.30615 | 0.31 | −1.258 | 465 | 0.306 | 0.049 | 4590 | 0.3061 | 0.016 | 45915 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Y.; Zhang, L.; Feng, Y.; Zhao, Y. Three-Dimensional Streamline Tracing Method over Tetrahedral Domains. Energies 2020, 13, 6027. https://doi.org/10.3390/en13226027
Luo Y, Zhang L, Feng Y, Zhao Y. Three-Dimensional Streamline Tracing Method over Tetrahedral Domains. Energies. 2020; 13(22):6027. https://doi.org/10.3390/en13226027
Chicago/Turabian StyleLuo, Yi, Liehui Zhang, Yin Feng, and Yulong Zhao. 2020. "Three-Dimensional Streamline Tracing Method over Tetrahedral Domains" Energies 13, no. 22: 6027. https://doi.org/10.3390/en13226027
APA StyleLuo, Y., Zhang, L., Feng, Y., & Zhao, Y. (2020). Three-Dimensional Streamline Tracing Method over Tetrahedral Domains. Energies, 13(22), 6027. https://doi.org/10.3390/en13226027