Fluctuation Suppression of DC-Link Voltage Using Control of Converters Connected with DC Distributed Generation



Abstract
1. Introduction
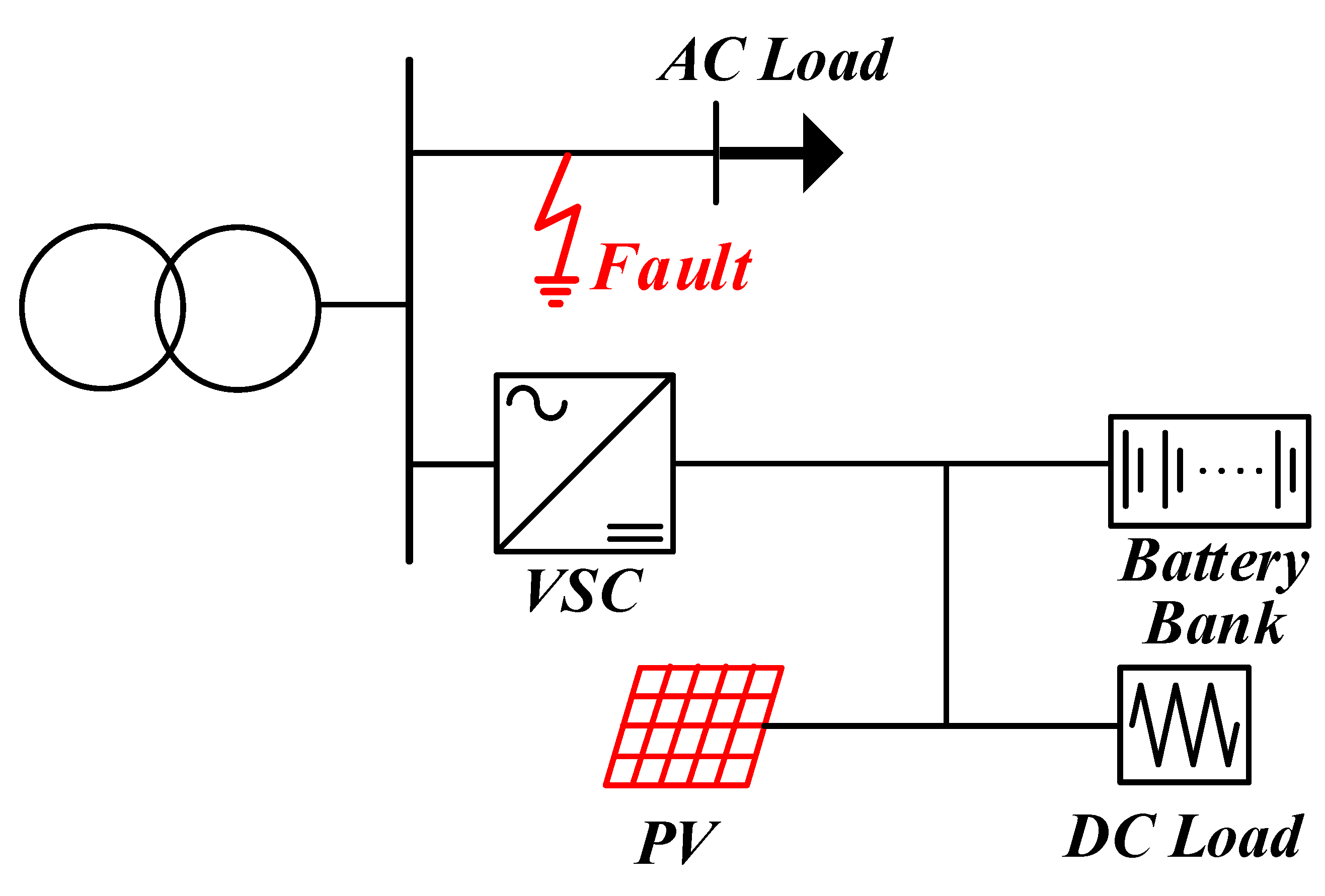
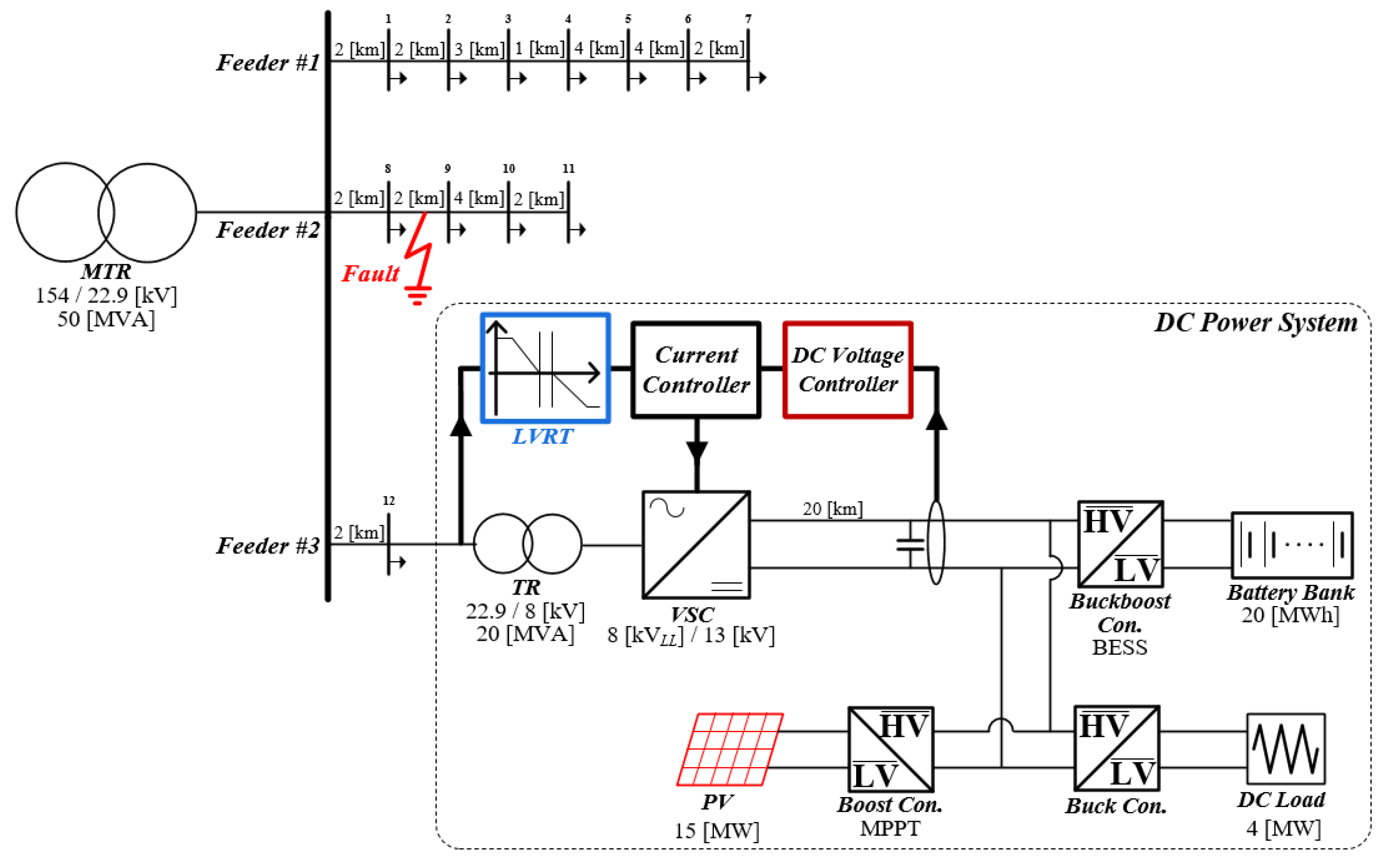
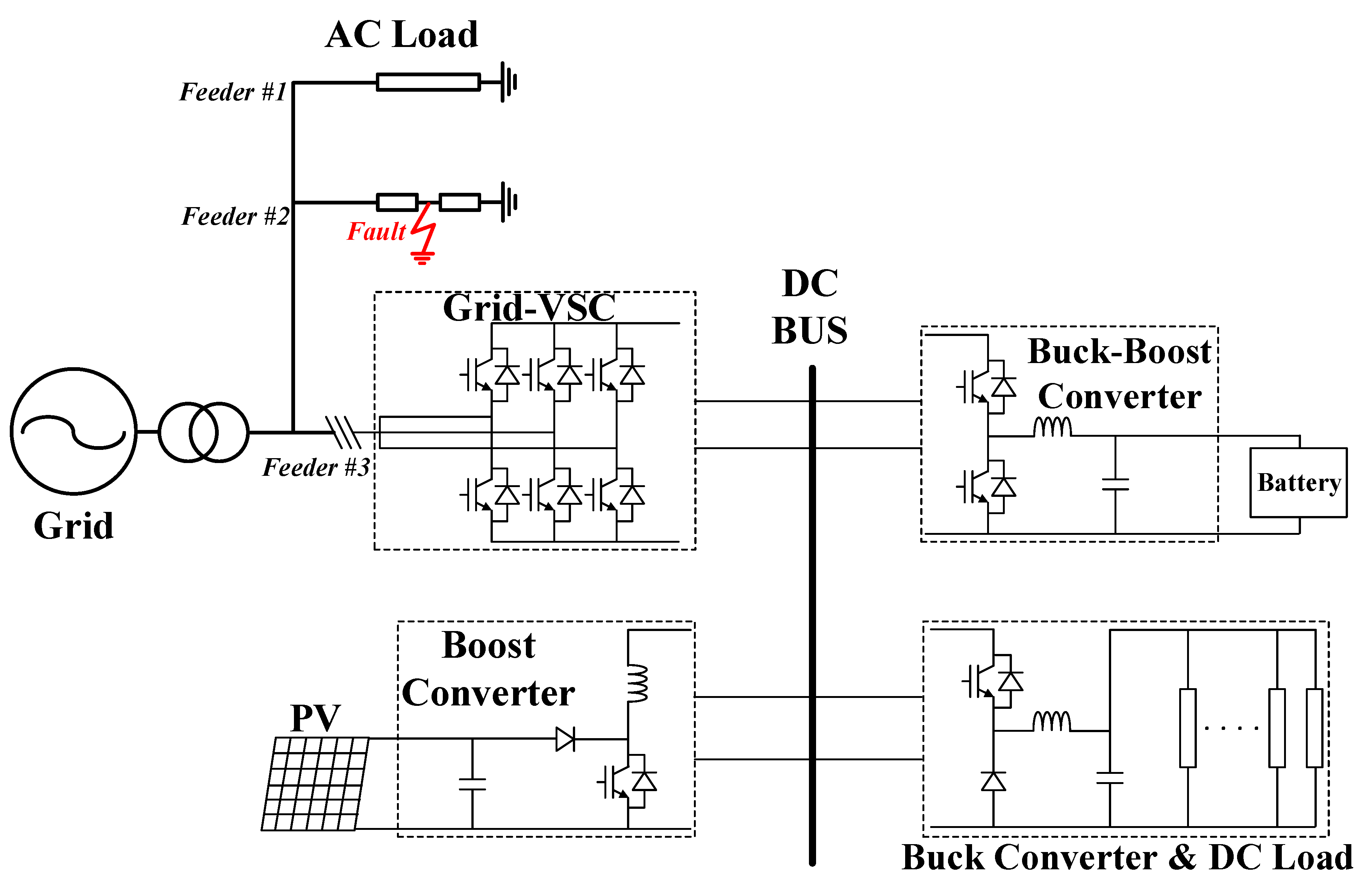
2. Power System Configuration
2.1. Power Distribution Sytem and OCR(Over-Current Relay) Modeling
2.2. DC Power System Configuration
2.3. DC Link Voltage Fluctuation
3. BESS and Voltage Regulation Algorithm
3.1. BESS in DC Power System
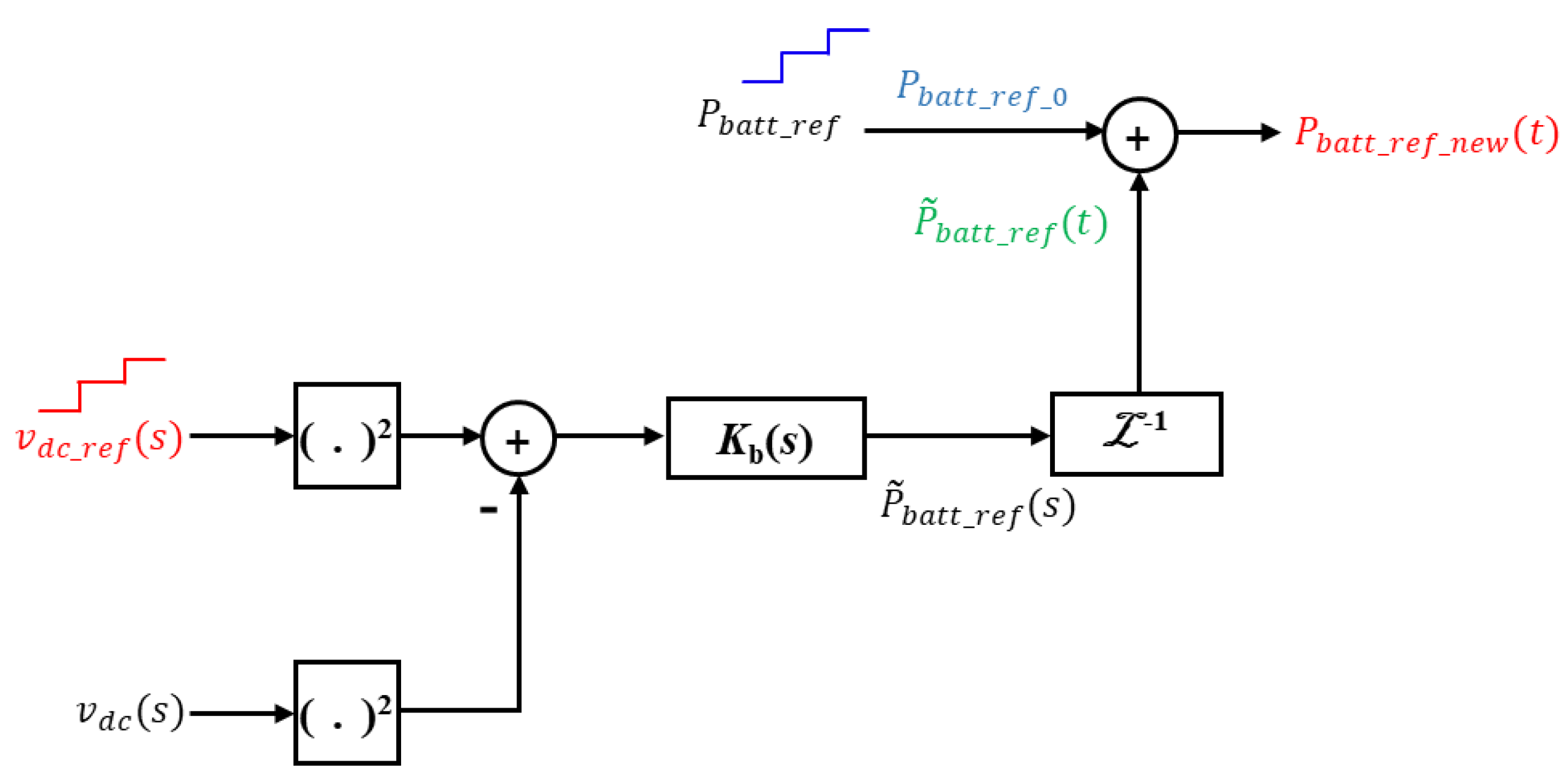
3.2. DC Link Voltage Fluctuation Suppression
4. Simulation and Results
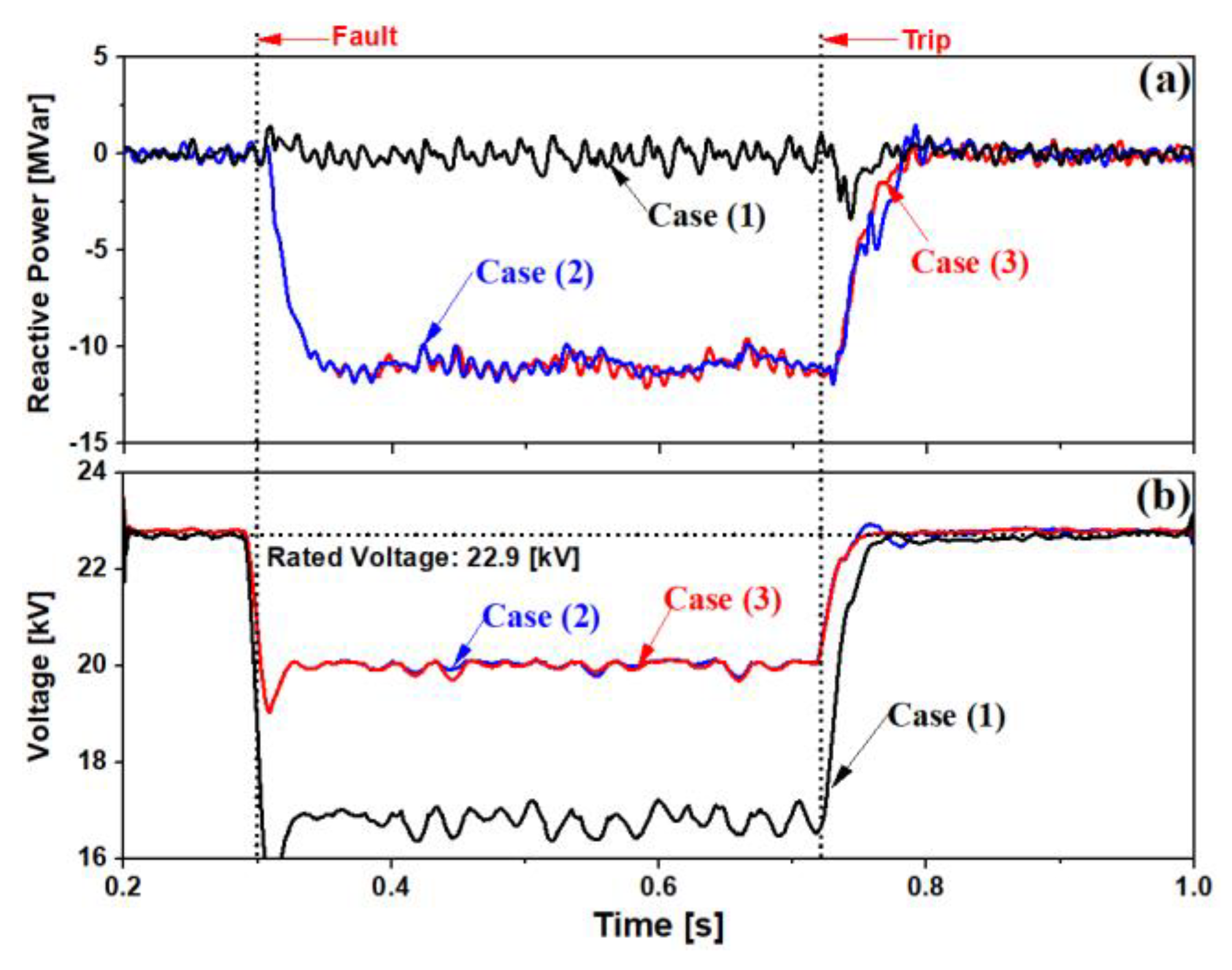
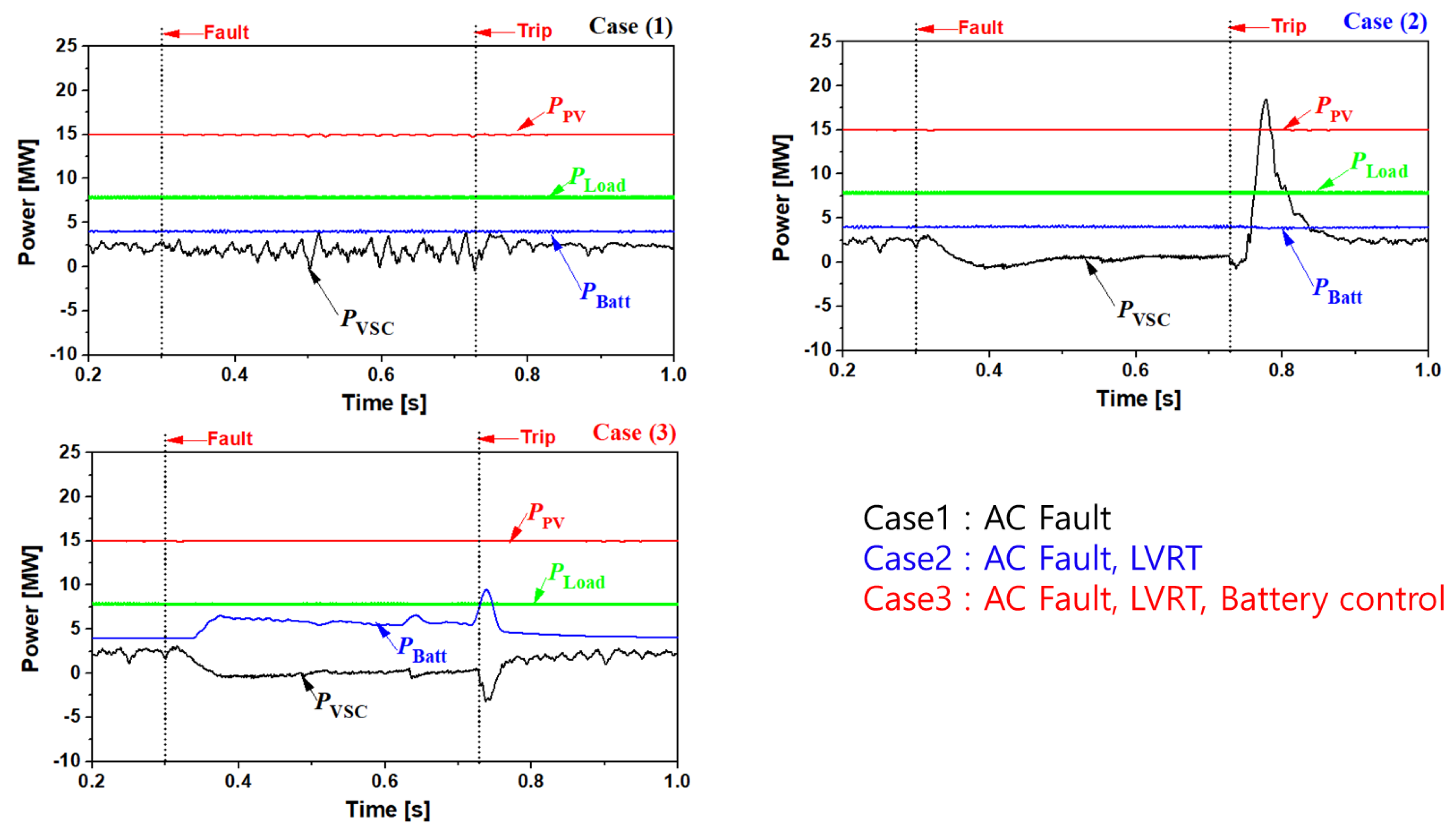
- Case (1): PV (15 [MW]) > DC Load (8 [MW]), Fault;
- Case (2): PV (15 [MW]) > DC Load (8 [MW]), Fault, LVRT;
- Case (3): PV (15 [MW]) > DC Load (8 [MW]), Fault, LVRT, Battery Control;
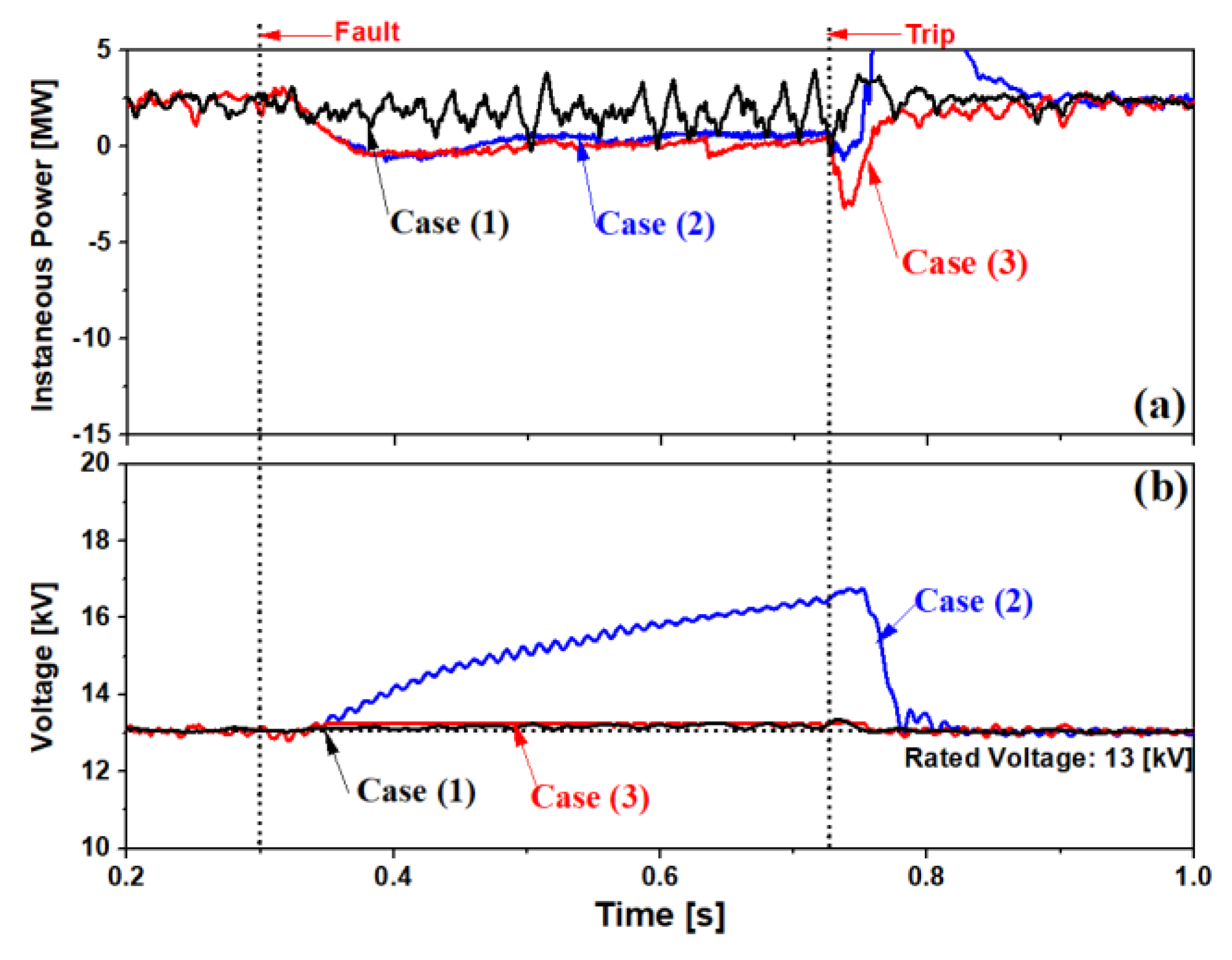
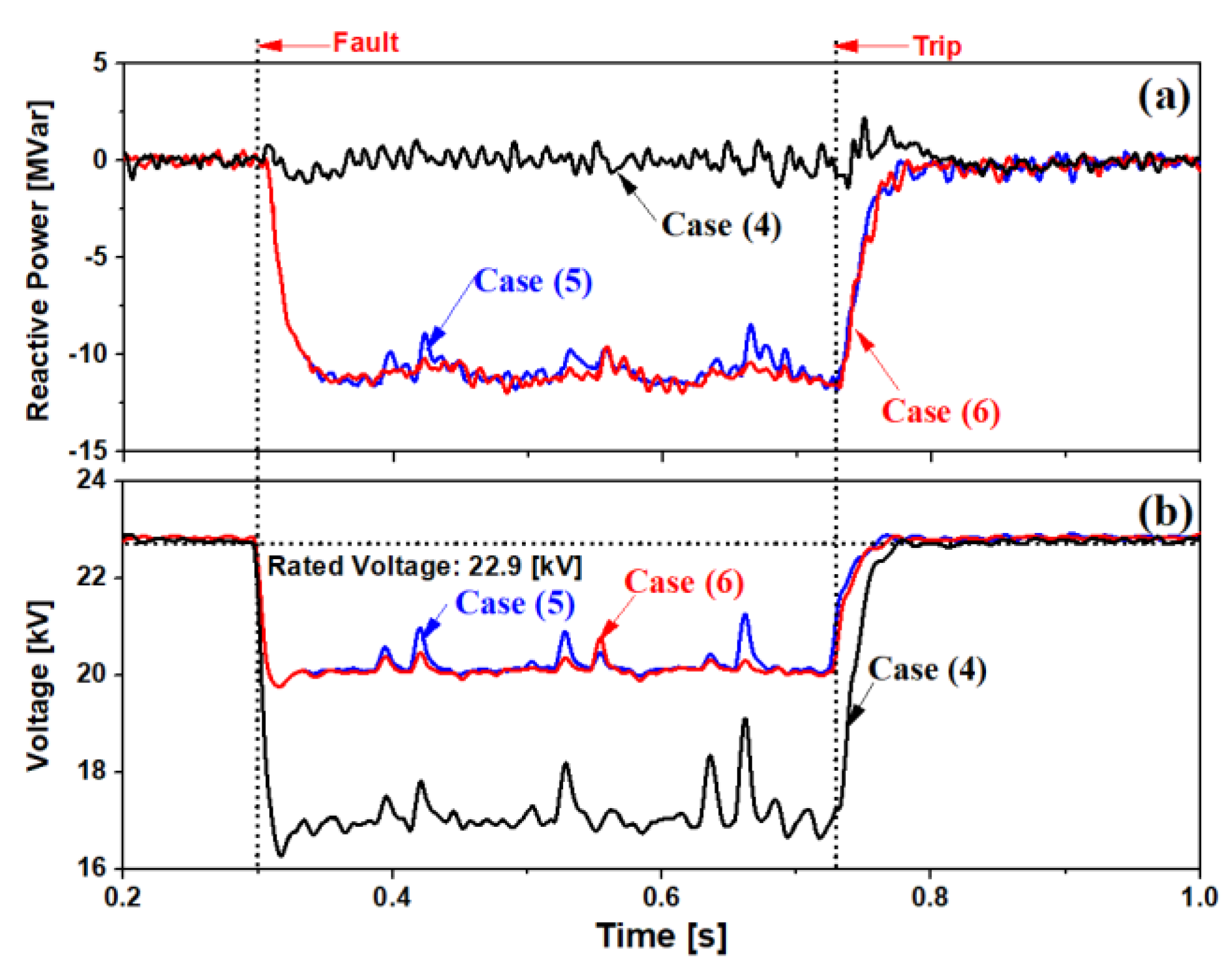
- Case (4): PV (1 [MW]) < DC Load (8 [MW]), Fault;
- Case (5): PV (1 [MW]) < DC Load (8 [MW]), Fault, LVRT;
- Case (6): PV (1 [MW]) < DC Load (8 [MW]), Fault, LVRT, Battery Control;
4.1. Simulation Conditions
4.2. Results and Discussion
5. Conclusions
- -
- When PV output is greater than DC load demand, DC link voltage rises due to LVRT operation;
- -
- When the DC link voltage rises, the overcurrent flows to the AC system when the fault is eliminated due to the increase in the amount of power charged in the capacitor;
- -
- When battery control is applied, DC link voltage rise is suppressed and overcurrent flowing to the AC system can be limited;
- -
- When PV output is less than DC load demand, DC link voltage drop due to LVRT operation;
- -
- Due to DC link voltage drop, PWM is included in the over-modulation area and control is not properly performed;
- -
- DC link voltage drop is suppressed through battery control and PWM is maintained in a linear- modulation area;
Author Contributions
Funding
Conflicts of Interest
References
- Van Der Meer, A.A.; Ndreko, M.; Gibescu, M.; Van Der Meijden, M.A.M.M. The Effect of FRT Behavior of VSC-HVDC-Connected Offshore Wind Power Plants on AC/DC System Dynamics. IEEE Trans. Power Deliv. 2015, 31, 878–887. [Google Scholar] [CrossRef]
- Christian, F.; Holger, W.; Friedrich, K. Fault ride-through of DFIG-based wind farms connected to the grid through VSC-based HVDC link. In Proceedings of the 2008 16th PSCC, Glasgow, UK, 14–18 July 2008. [Google Scholar]
- Balaguer, I.J.; Lei, Q.; Yang, S.; Supatti, U.; Peng, F.Z. Control for Grid-Connected and Intentional Islanding Operations of Distributed Power Generation. IEEE Trans. Ind. Electron. 2010, 58, 147–157. [Google Scholar] [CrossRef]
- Christian, F.; Holger, W.; Friedrich, K.; Erlich, I. Enhanced Fault Ride-Through Method for Wind Farms Connected to the Grid Through VSC-Based HVDC Transmission. IEEE Trans. Power Syst. 2009, 24, 1537–1546. [Google Scholar] [CrossRef]
- Ramtharan, G.; Arulampalam, A.; Ekanayake, J.B.; Hughes, F.M.; Jenkins, N. Fault ride through of fully rated converter wind turbines with AC and DC transmission systems. IET Renew. Power Gener. 2009, 3, 426. [Google Scholar] [CrossRef]
- Arulampalam, A.; Ramtharan, G.; Ekanayake, J.; Tennakoon, A.; Abeyratne, S.; Jenkins, N. Fault Ride Through operation of a DFIG wind farm connected through VSC HVDC. In Proceedings of the 2010 5th International Conference on Industrial and Information Systems, Mangalore, India, 29 July–1 August 2010; pp. 520–525. [Google Scholar]
- Wang, L.; Wen, J.; Cai, M.; Zhang, Y. Distributed Optimization Control Schemes Applied On Offshore Wind Farm Active Power Regulation. Energy Procedia 2017, 105, 1192–1198. [Google Scholar] [CrossRef]
- Yao, Q.; Liu, J.; Hu, Y. Optimized Active Power Dispatching Strategy Considering Fatigue Load of Wind Turbines During De-Loading Operation. IEEE Access 2019, 7, 17439–17449. [Google Scholar] [CrossRef]
- Chaudhary, S.K.; Teodorescu, R.; Rodriguez, P.; Kjar, P.C. Chopper controlled resistors in VSC-HVDC transmission for WPP with full-scale converters. In Proceedings of the 2009 IEEE PES/IAS Conference on Sustainable Alternative Energy (SAE), Valencia, Spain, 28–30 September 2009; pp. 1–8. [Google Scholar]
- Xu, C.; Zhang, X.; Yu, Z.; Zhao, B.; Chen, Z.; Zeng, R. A Novel DC Chopper With MOV-Based Modular Solid-State Switch and Concentrated Dissipation Resistor for ±400 kV/1100 MW Offshore Wind VSC-HVDC System. IEEE Trans. Power Electron. 2020, 35, 4483–4488. [Google Scholar] [CrossRef]
- Pannell, G.; Zahawi, B.; Atkinson, D.; Missailidis, P. Evaluation of the Performance of a DC-Link Brake Chopper as a DFIG Low-Voltage Fault-Ride-Through Device. IEEE Trans. Energy Convers. 2013, 28, 535–542. [Google Scholar] [CrossRef]
- Kim, J.S.; Lim, S.-H.; Kim, J.-C. Study on Application Method of Superconducting Fault Current Limiter for Protection Coordination of Protective Devices in a Power Distribution System. IEEE Trans. Appl. Supercond. 2011, 22, 5601504. [Google Scholar] [CrossRef]
- Lim, S.-T.; Lim, S.-H. Analysis on Operational Improvement of OCR Using Voltage Component in a Power Distribution System for Application of SFCL. J. Electr. Eng. Technol. 2019, 14, 1027–1033. [Google Scholar] [CrossRef]
- Blackburn, J.L.; Domin, T.J. Protective Relaying: Principles and Applications, 4th ed.; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Flourentzou, N.; Agelidis, V.G.; Demetriades, G.D. VSC-Based HVDC Power Transmission Systems: An Overview. IEEE Trans. Power Electron. 2009, 24, 592–602. [Google Scholar] [CrossRef]
- Gemmell, B.; Dorn, J.; Retzmann, D.; Soerangr, D. Prospects of multilevel VSC technologies for power transmission. In Proceedings of the 2008 IEEE/PES Transmission and Distribution Conference and Exposition, Bogota, Columbia, 13–15 August 2008; pp. 1–16. [Google Scholar]
- Meyer, C.; Hoing, M.; Peterson, A.; De Doncker, R.W. Control and Design of DC Grids for Offshore Wind Farms. IEEE Trans. Ind. Appl. 2007, 43, 1475–1482. [Google Scholar] [CrossRef]
- Yazdani, A.; Iravani, R. Votage-Sourced Converters in Power Systems: Modeling, Control, and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Jin, P.; Li, Y.; Li, G.; Chen, Z.; Zhai, X. Optimized hierarchical power oscillations control for distributed generation under unbalanced conditions. Appl. Energy 2017, 194, 343–352. [Google Scholar] [CrossRef]
- Hannan, M.A.; Hussin, I.; Ker, P.J.; Hoque, M.M.; Lipu, M.S.H.; Hussain, A.; Rahman, M.S.A.; Faizal, C.W.M.; Blaabjerg, F. Advanced Control Strategies of VSC Based HVDC Transmission System: Issues and Potential Recommendations. IEEE Access 2018, 6, 78352–78369. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Li, G.; Zhao, D.; Chen, C. Two-stage multi-objective OPF for AC/DC grids with VSC-HVDC: Incorporating decisions analysis into optimization process. Energy 2018, 147, 286–296. [Google Scholar] [CrossRef]
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics: Converters, Applications and Design; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Rauschenbach, H.S. Solar Cell Array Design Handbook; Springer: Berlin/Heidelberg, Germany, 1980. [Google Scholar]
- Gow, J.; Manning, C. Development of a photovoltaic array model for use in power-electronics simulation studies. IEE Proc. Electr. Power Appl. 1999, 146, 193. [Google Scholar] [CrossRef]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Modeling and circuit-based simulation of photovoltaic arrays. In Proceedings of the 2009 Brazilian Power Electronics Conference, Bonito, Brazil, 27 September–1 October 2009; pp. 1244–1254. [Google Scholar]
- Wasynezuk, O. Dynamic Behavior of a Class of Photovoltaic Power Systems. IEEE Trans. Power Appar. Syst. 1983, 102, 3031–3037. [Google Scholar] [CrossRef]
- Hussein, K.H.; Muta, I.; Hoshino, T.; Osakada, M. Maximum photovoltaic power tracking: An algorithm for rapidly changing atmospheric conditions, Generation, Transmission and Distribution. IEE Proc. Gener. Transm. Distrib. 1995, 142, 59. [Google Scholar] [CrossRef]
- Rastler, D. Electricity Energy Storage Technology Options a White Paper Primer on Applications, Costs and Benefits; Electric Power Research Institute: Washington, DC, USA, 2010. [Google Scholar]
- Krishnamachari, B.; Czarkowski, D. Bidirectional buck-boost converter with variable output voltage. In Proceedings of the ISCAS ’98. Proceedings of the 1998 IEEE International Symposium on Circuits and Systems (Cat. No.98CH36187), Monterey, CA, USA, 31 May–3 June 1998; pp. 446–449. [Google Scholar]
- Kazimierczuk, M.K. Pulse-Width Modulated DC-DC Power Converters, 2nd ed.; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus No. | Value | Unit |
|---|---|---|
| 1 | 1 | (MW) |
| 2 | 2 | (MW) |
| 3 | 1 | (MW) |
| 4 | 1 | (MW) |
| 5 | 1 | (MW) |
| 6 | 1 | (MW) |
| 7 | 3 | (MW) |
| 8 | 2 | (MW) |
| 9 | 3 | (MW) |
| 10 | 1 | (MW) |
| 11 | 4 | (MW) |
| 12 | 2 | (MW) |
| Index | Description | Value | Unit |
|---|---|---|---|
| TD | Time Dial | 0.02 | - |
| A | OCR Trip Index | 39.85 | - |
| B | OCR Trip Index | 1.084 | - |
| p | Non-linear Index for OCR trip | 1.95 | - |
| Ipickup | Threshold current | 3.5 | (kA) |
| Type of Management System | Installation Advantages |
|---|---|
| Load Leveling |
|
| Ancillary Service |
|
| Power Quality Compensation and Emergency Power Source |
|
| Renewable Energy Output Power Control |
|
| Item | Classification | Value | Unit |
|---|---|---|---|
| DC System | Rated Voltage | 15 | (kV) |
| Cable Type | XLPE (ABB, July 2017) | ||
| Cable Impedance | 0. 022 | (mΩ/km) | |
| Switching Frequency | 1980 | (Hz) | |
| VSC Control () | 15/(0 or FRT) | (kV)/(MVar) | |
| AC Distribution System | Load | Figure 2 | |
| Line Type | CNCV/W 325 | mm2 | |
| Line Impedance | 0.0939 + j0.1492 | (Ω/km) | |
| Line Length | Figure 2 | ||
| VSC PI Controller | Current Controller | Proportional gain (kP): 3.33 | - |
| Integral Time Constant (τi): 0.0002 | (s) | ||
| DC link Voltage Controller | Proportional gain (kPv): 13.25 | - | |
| Integral Time Constant (τ): 0.00001 | (s) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, S.-J.; Lim, S.-H. Fluctuation Suppression of DC-Link Voltage Using Control of Converters Connected with DC Distributed Generation. Energies 2020, 13, 5832. https://doi.org/10.3390/en13215832
Choi S-J, Lim S-H. Fluctuation Suppression of DC-Link Voltage Using Control of Converters Connected with DC Distributed Generation. Energies. 2020; 13(21):5832. https://doi.org/10.3390/en13215832
Chicago/Turabian StyleChoi, Sang-Jae, and Sung-Hun Lim. 2020. "Fluctuation Suppression of DC-Link Voltage Using Control of Converters Connected with DC Distributed Generation" Energies 13, no. 21: 5832. https://doi.org/10.3390/en13215832
APA StyleChoi, S.-J., & Lim, S.-H. (2020). Fluctuation Suppression of DC-Link Voltage Using Control of Converters Connected with DC Distributed Generation. Energies, 13(21), 5832. https://doi.org/10.3390/en13215832