Disturbance Observer and L2-Gain-Based State Error Feedback Linearization Control for the Quadruple-Tank Liquid-Level System

Abstract
1. Introduction
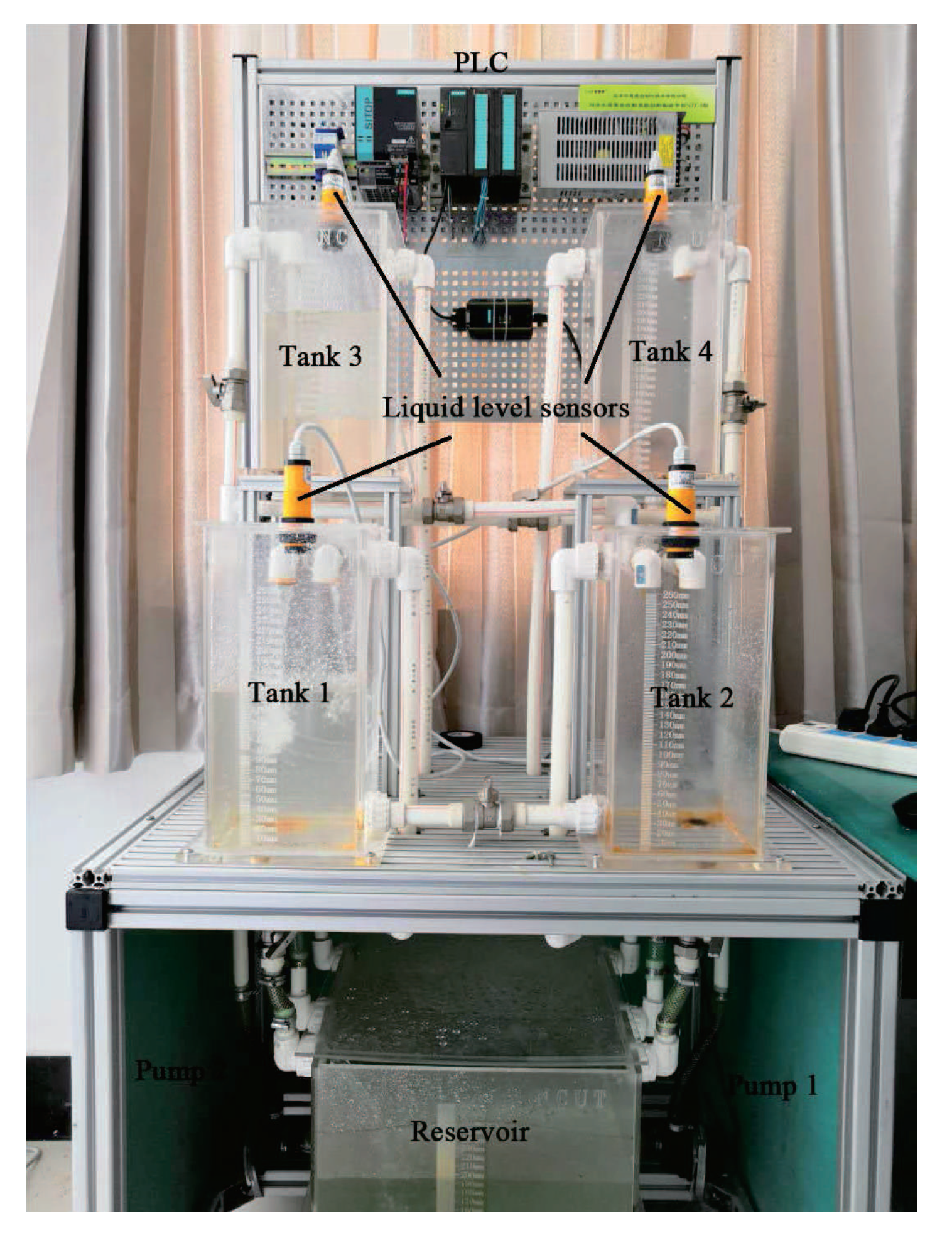
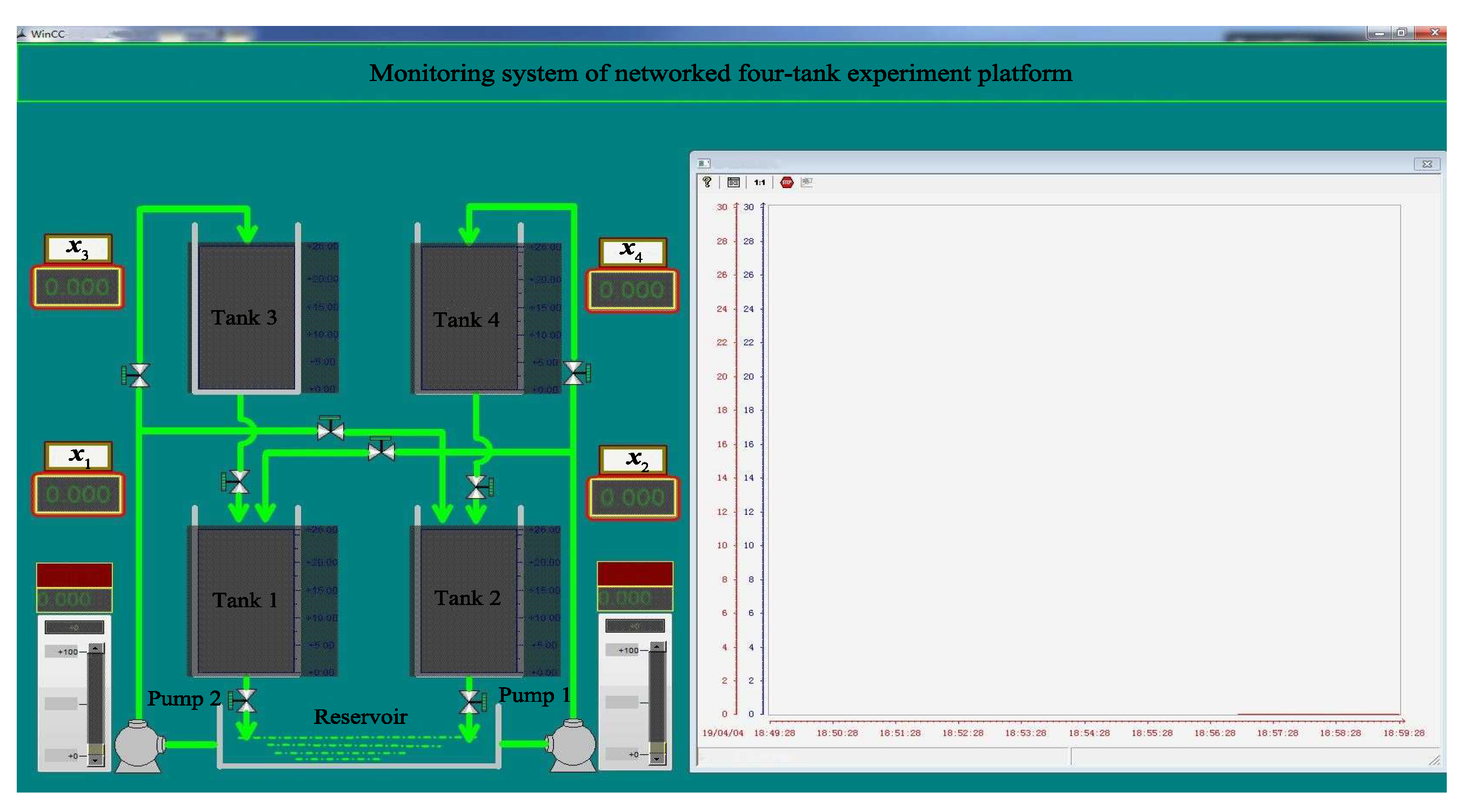
2. Description of Quadruple-Tank System
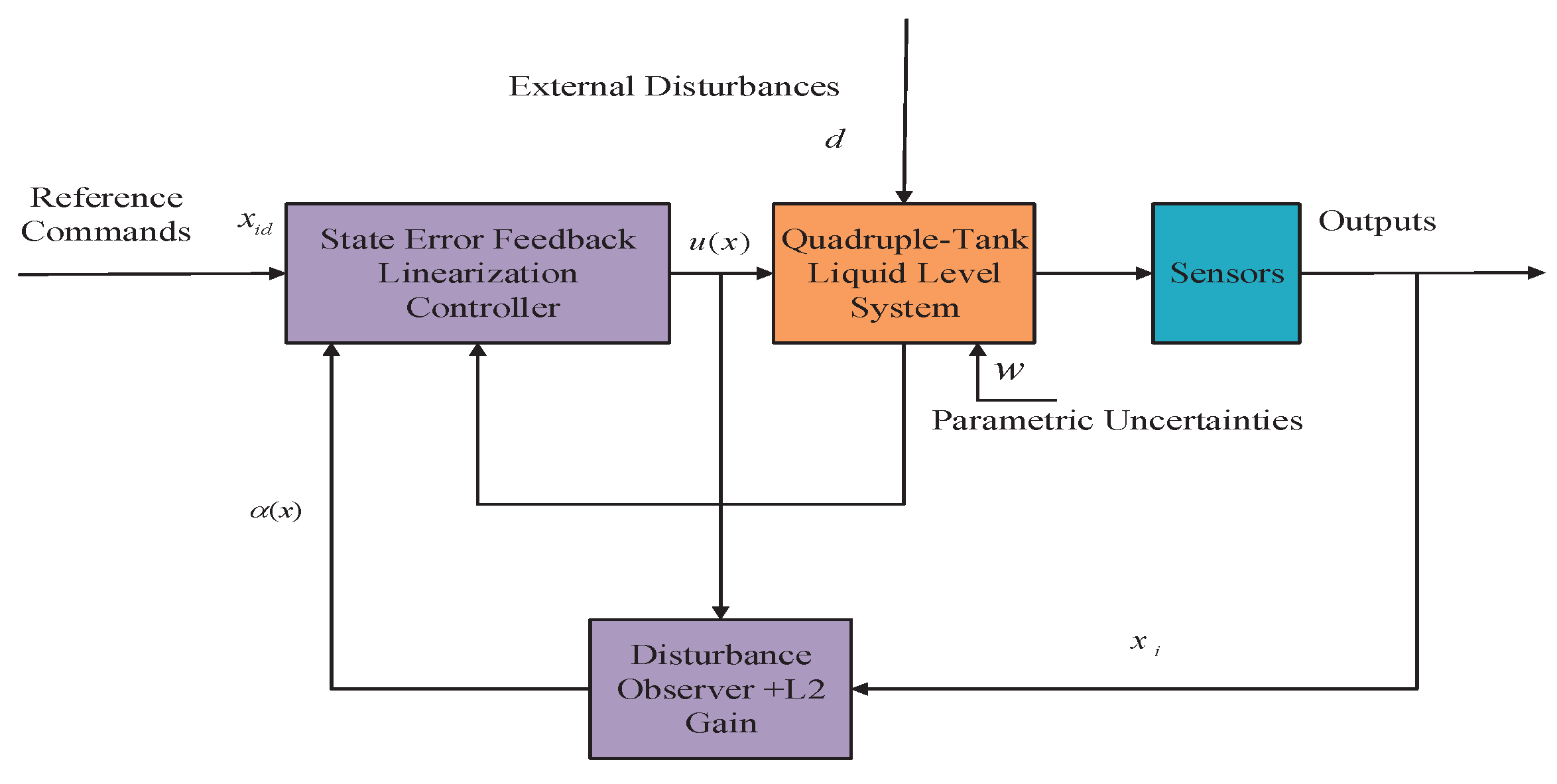
3. Control Strategy Design of the Quadruple-Tank Liquid-Level System
3.1. The State Error Feedback Linearization Controller Design
3.2. Design of Disturbance Observer
3.3. -Gain Disturbance Attenuation Law Injection
3.4. Asymptotic Stability Analysis
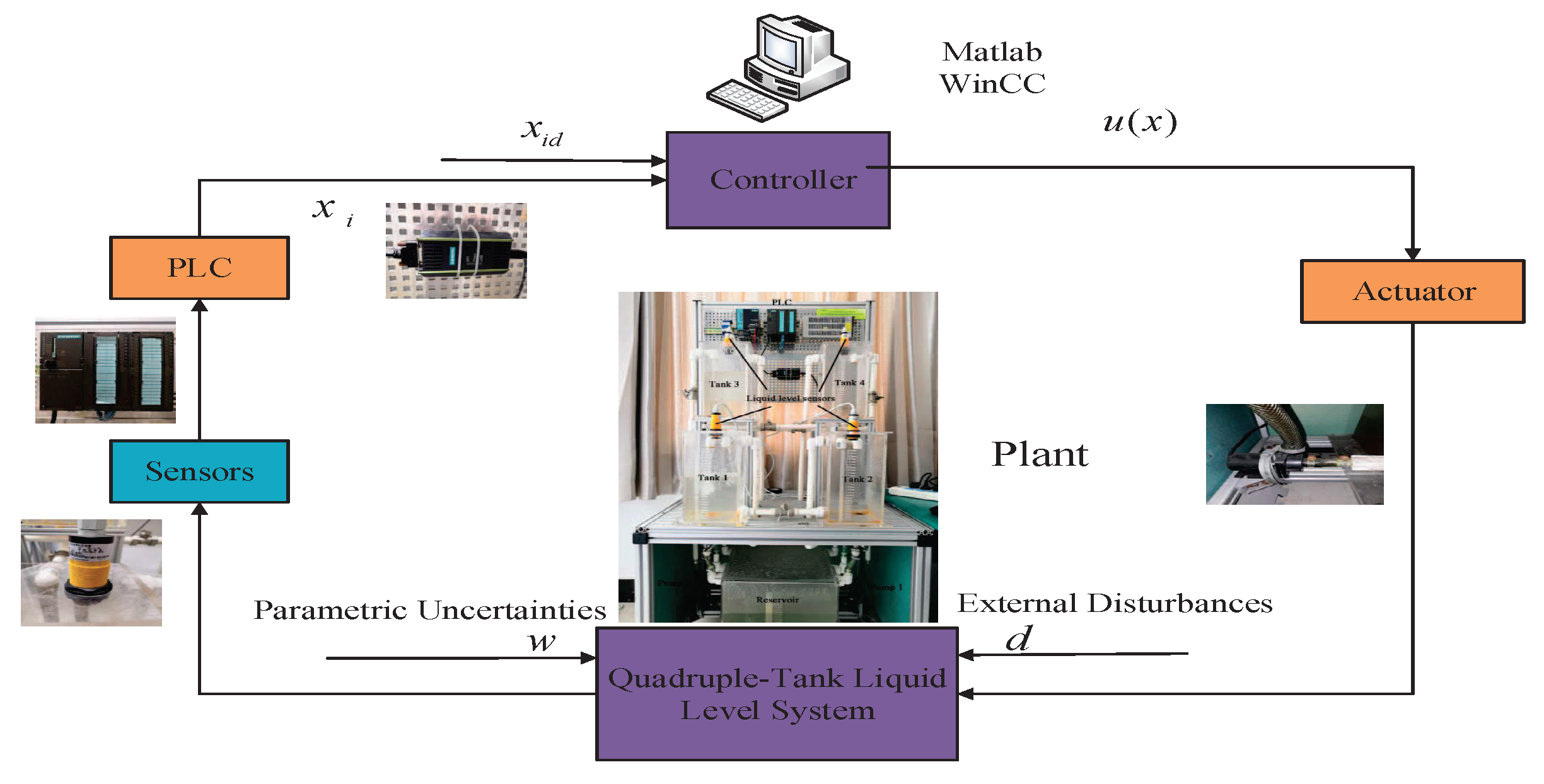
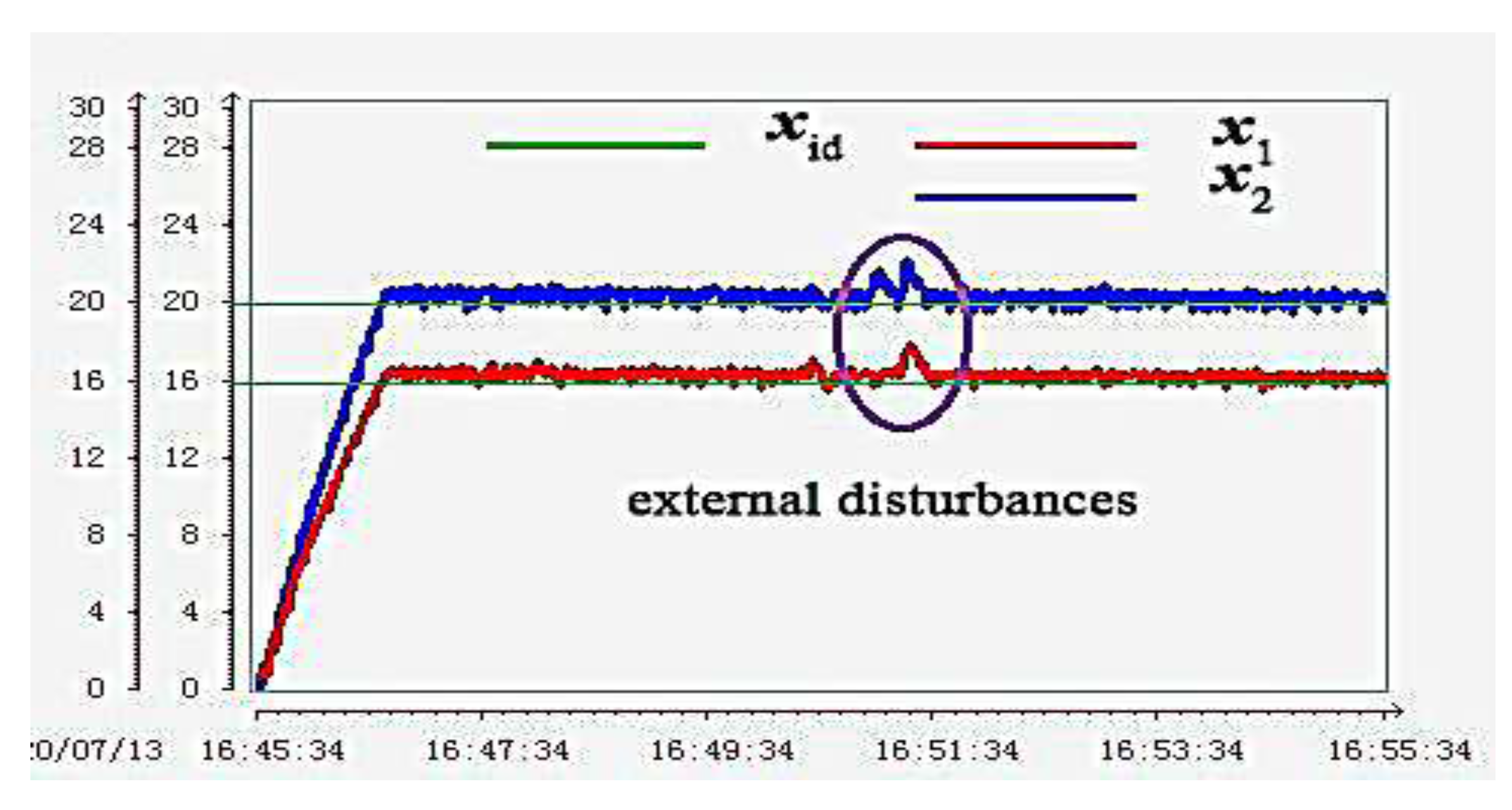
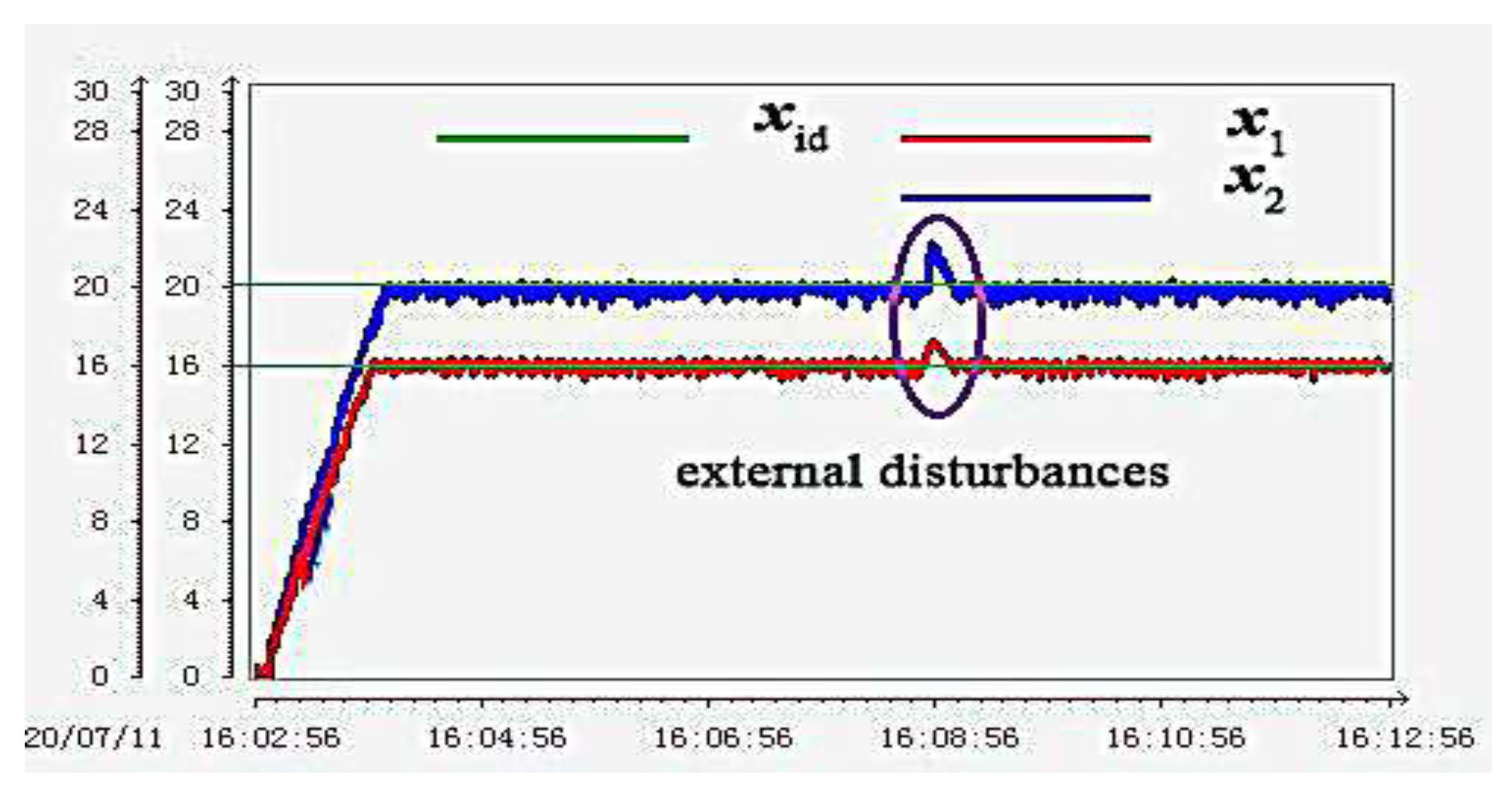
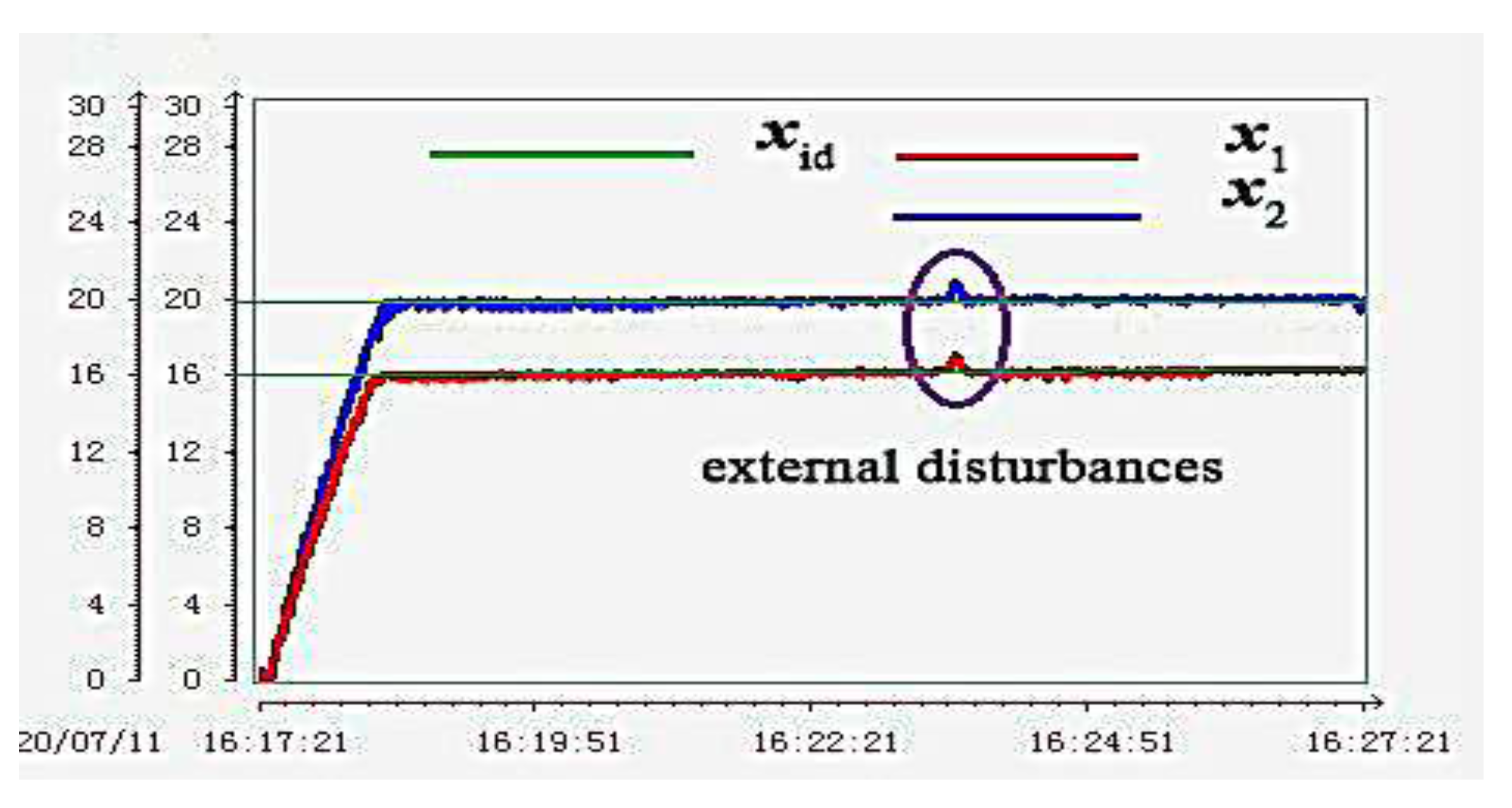
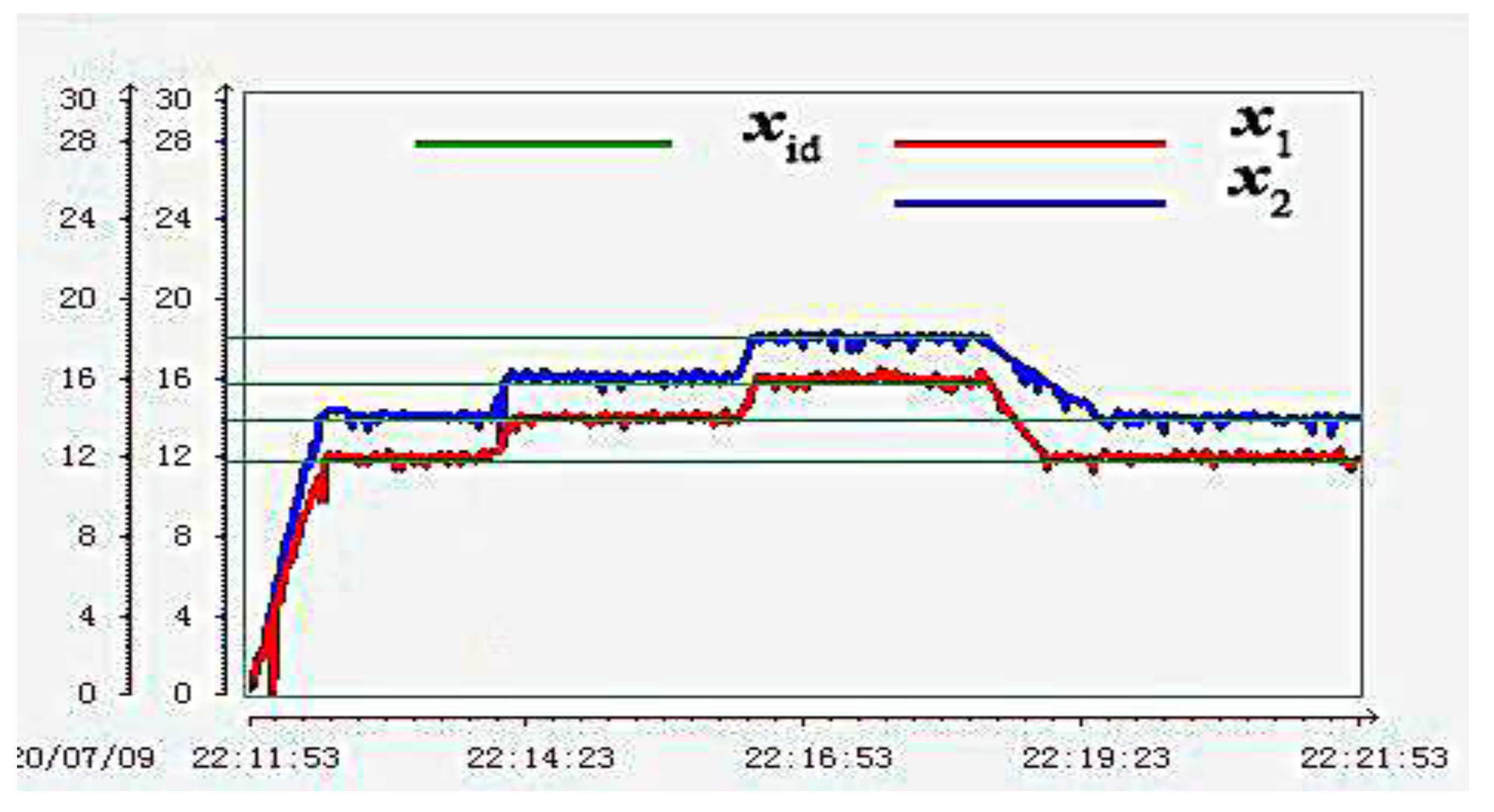
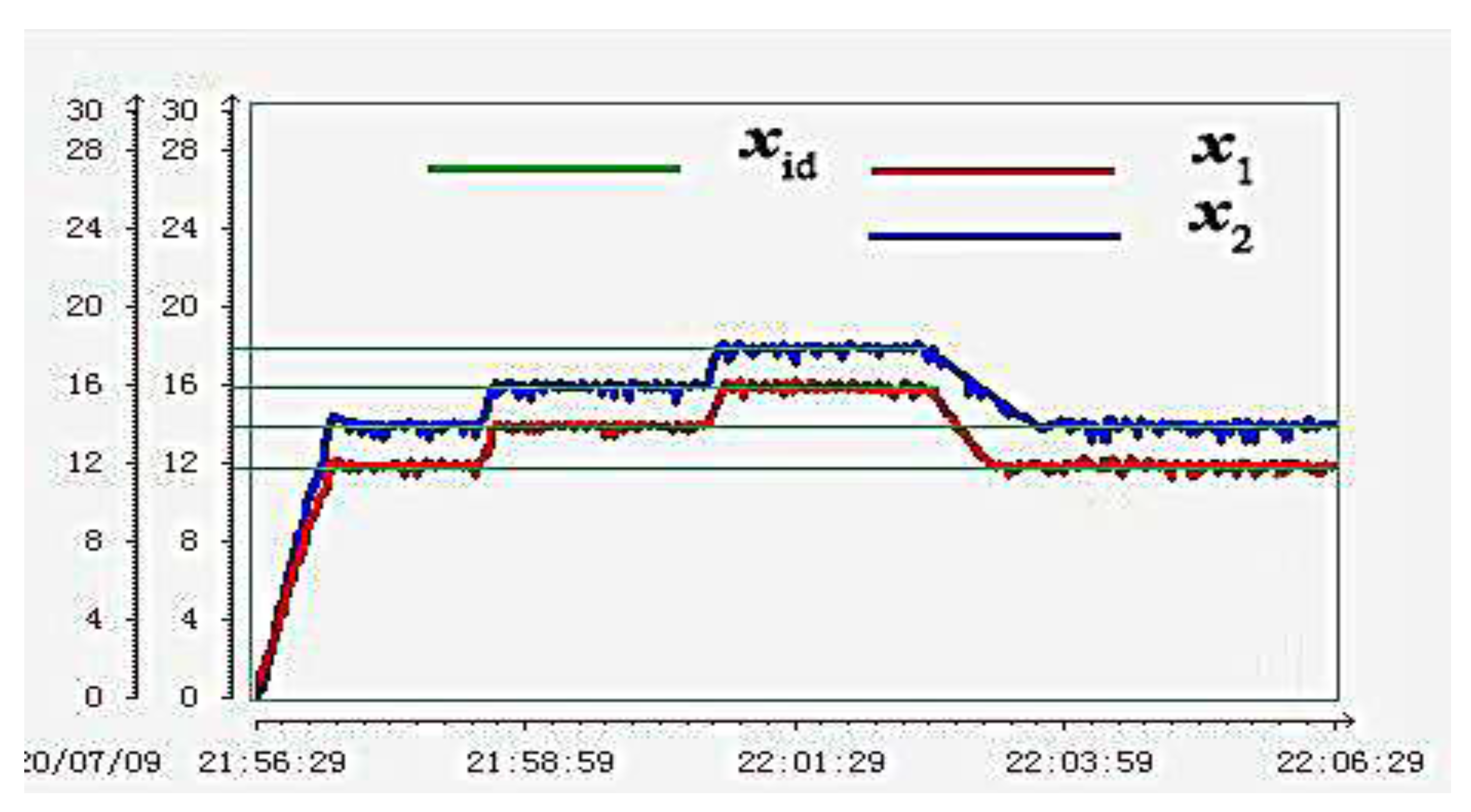
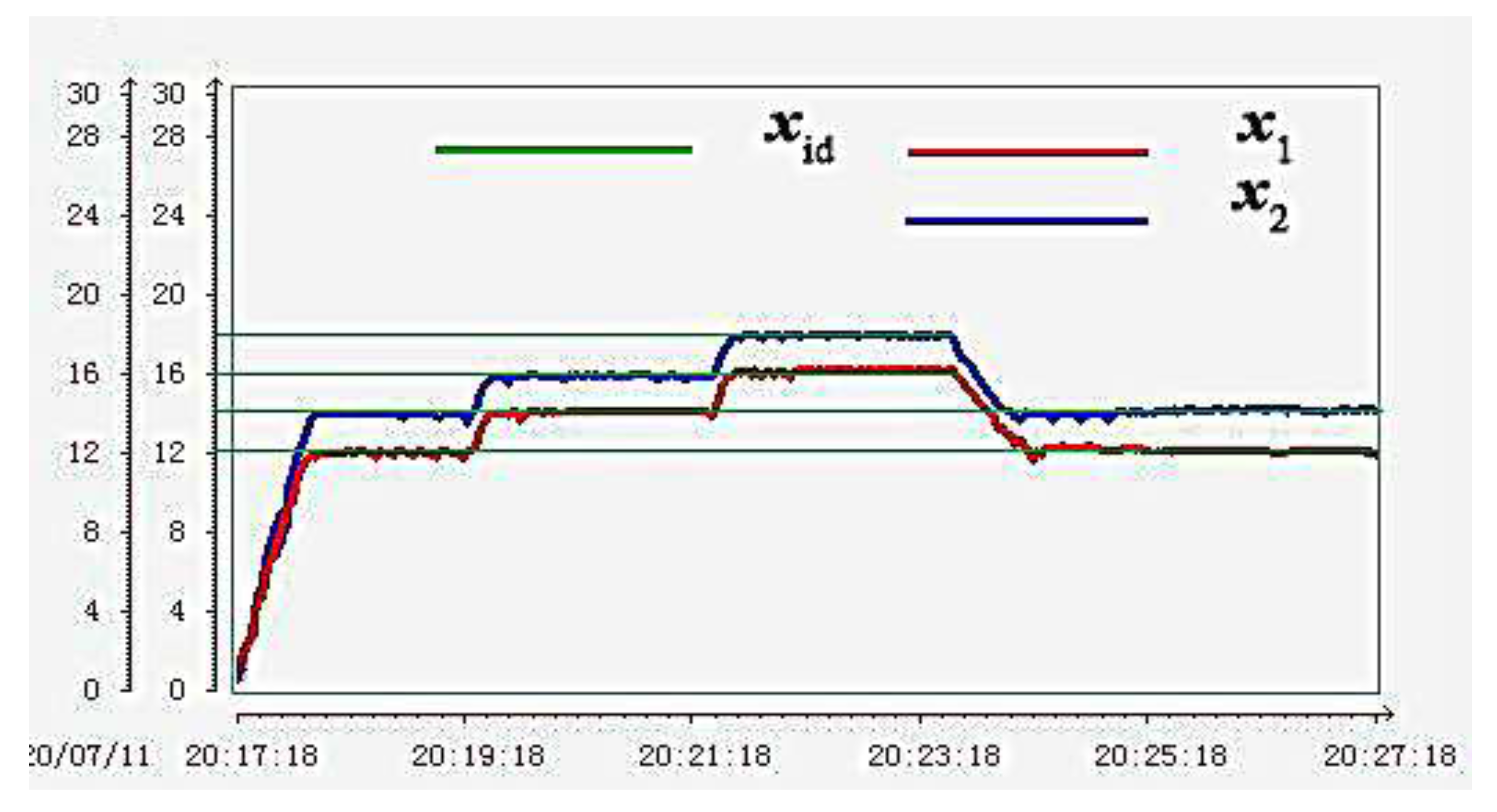
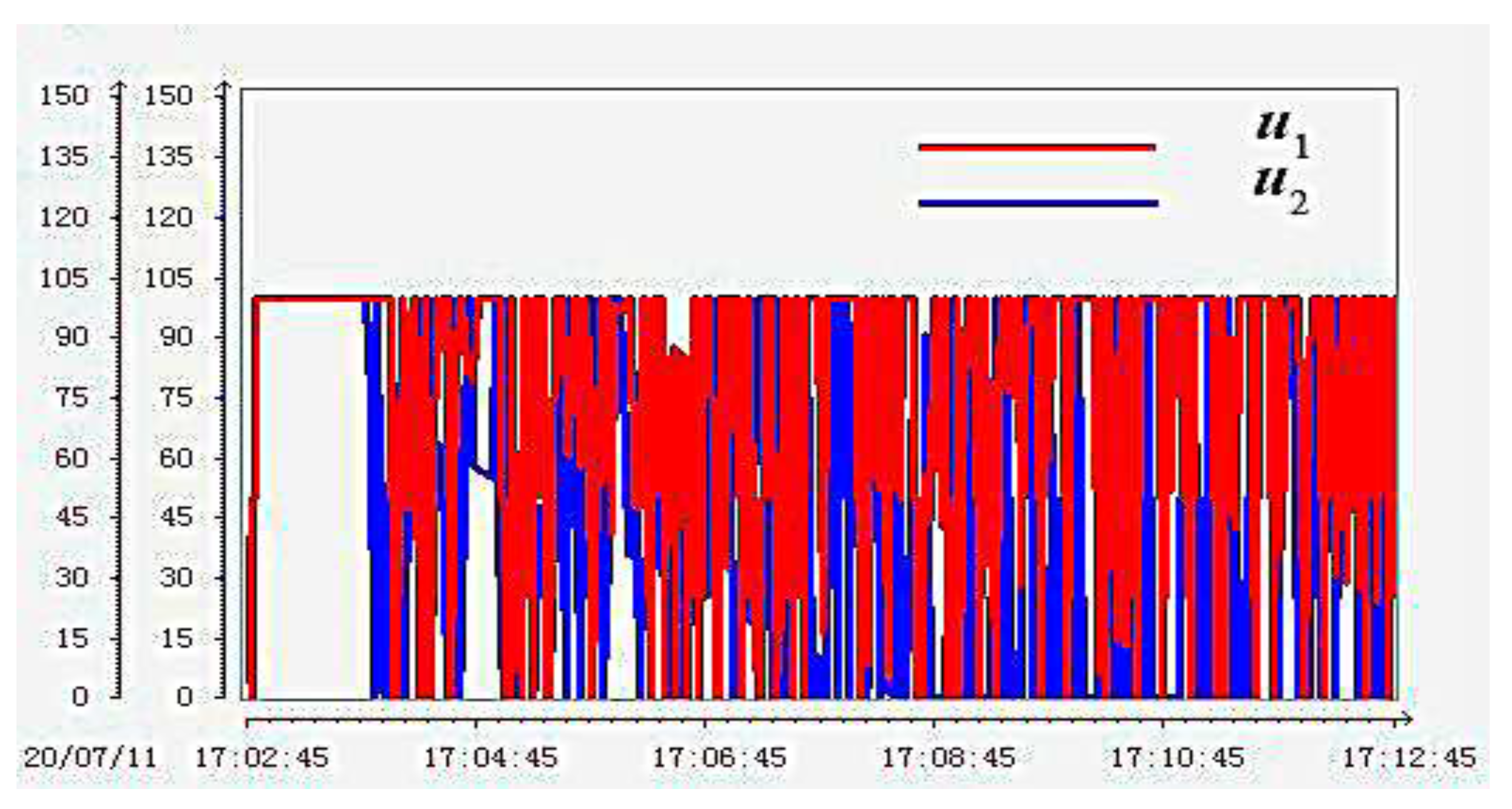
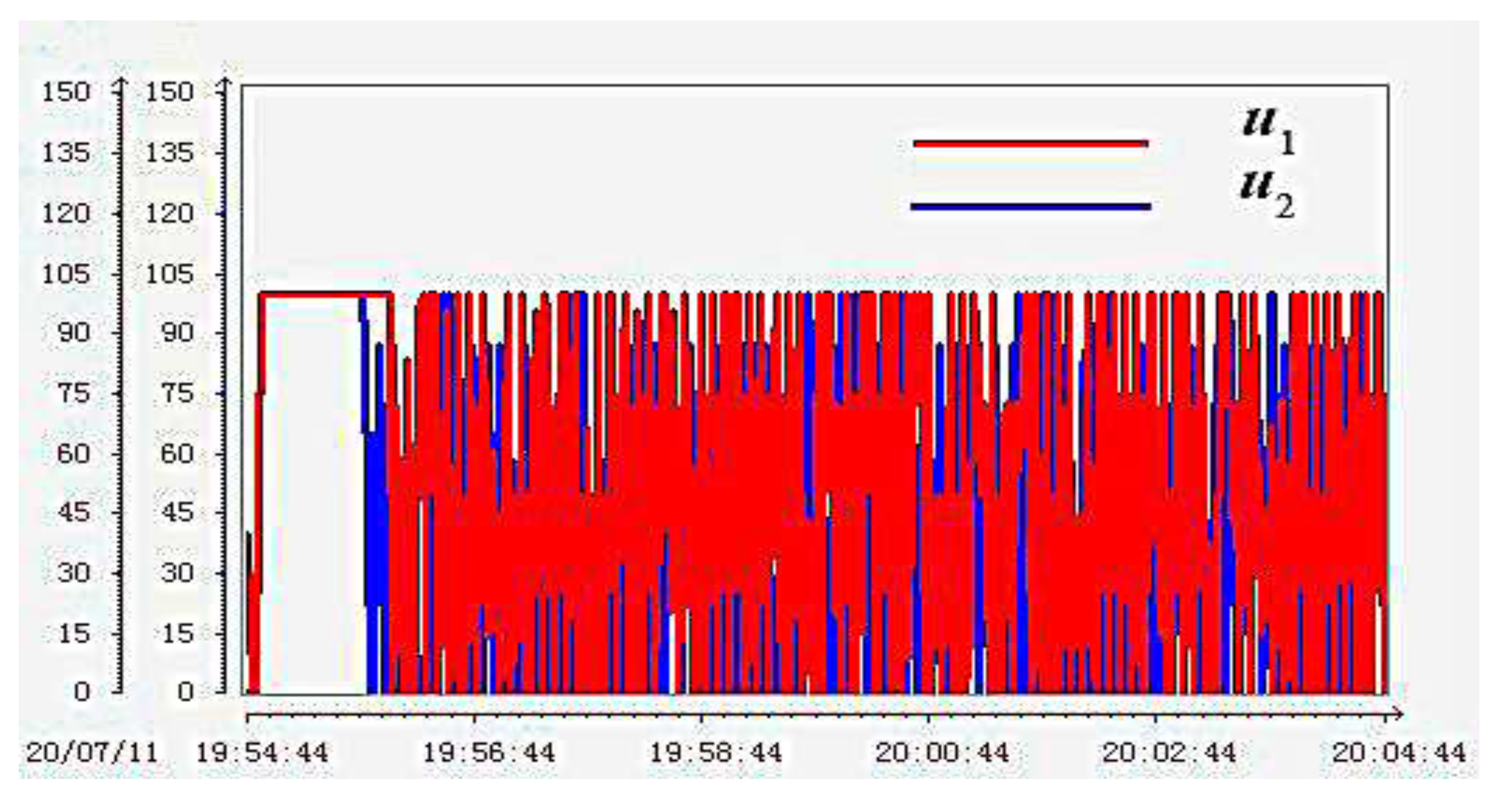
4. Experiment Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| disturbance observer | |
| proportion integration differentiation | |
| sliding mode control | |
| multi-input and multioutput | |
| degree of freedom | |
| proportion integral | |
| inductance capacitance inductance | |
| active disturbance rejection controller | |
| single input single output | |
| direct current | |
| programmable logic controller | |
| personal computer | |
| analog input | |
| analog output | |
| object linking and embedding for process control | |
| central processing unit | |
| windows control center | |
| the height of liquid inside the tank i | |
| desired liquid-level value | |
| the cross-section of tank i | |
| the cross-section of the outlet manual valve i | |
| g | the gravitational acceleration |
| rise time | |
| steady-state error | |
| adjusting time | |
| overshoots |
References
- Johansson, K.H. The Quadruple-Tank Process: A Multivariable Laboratory Process with an Adjustable Zero. IEEE Trans. Control. Syst. Technol. 2000, 8, 456–465. [Google Scholar]
- Gatzke, E.P.; Meadows, E.S.; Wang, C.; Doyle, F.J. Model based control of a four-tank system. Comput. Chem. Eng. 2000, 24, 1503–1509. [Google Scholar]
- Shneiderman, D.; Palmor, Z.J. Properties and control of the quadruple-tank process with multivariable dead-times. J. Process Control 2010, 20, 18–28. [Google Scholar]
- Vadigepalli, R.; Gatzke, E.P.; Doyle, F.J. Robust Control of a Multivariable Experimental Four-Tank System. Ind. Eng. Chem. Res. 2001, 40, 1916–1927. [Google Scholar]
- Kumar, E.; Mithunchakravarthi, B.; Dhivya, N. Enhancement of PID controller performance for a quadruple tank process with minimum and non-minimum phase behaviors. IEEE Trans. Control. Syst. Technol. 2005, 13, 480–489. [Google Scholar]
- Ang, K.H.; Chong, G.; Li, Y. PID control system analysis, design and technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–576. [Google Scholar]
- Holic, I.; Vesely, V. Robust PID controller design for coupled-tank process using Labreg software. IFAC Proc. 2012, 45, 442–447. [Google Scholar]
- Kumar, K.; Patwardhan, S.C.; Noronha, S. Development of an adaptive and explicit dual model predictive controller based on generalized orthogonal basis filters. J. Process Control 2019, 93, 196–214. [Google Scholar]
- Yu, T.Y.; Zhao, J.; Xu, Z.H.; Chen, X.; Biegler, L.T. Sensitivity-based hierarchical distributed model predictive control of nonlinear processes. J. Process Control 2019, 84, 146–167. [Google Scholar]
- Thamallah, A.; Sakly, A.; M’Sahli, F. A new constrained PSO for fuzzy predictive control of Quadruple-Tank process. Measurement 2019, 136, 93–104. [Google Scholar]
- Pan, H.Z.; Wong, H.; Kapila, V.; Queiroz, M.S.D. Experimental validation of a nonlinear backstepping liquid level controller for a state coupled two tank system. Control Eng. Pract. 2015, 13, 27–40. [Google Scholar] [CrossRef]
- Meng, X.X.; Yu, H.S.; Wu, H.R.; Xu, T. Disturbance Observer-Based Integral Backstepping Control for a Two-Tank Liquid Level System Subject to External Disturbances. Math. Probl. Eng. 2020, 3, 1–22. [Google Scholar]
- Shah, D.H.; Patel, D.M. Design of sliding mode control for quadruple-tank MIMO process with time delay compensation. J. Process Control 2019, 76, 46–61. [Google Scholar] [CrossRef]
- Chaudhari, V.; Tamhane, B.; Kurode, S. Robust Liquid Level Control of Quadruple Tank System-Second Order Sliding Mode Approach. IFAC Pap. Online 2020, 53, 7–12. [Google Scholar]
- Yu, H.S.; Yu, J.P.; Wu, H.R.; Li, H.L. Energy-shaping and integral control of the three-tank liquid level system. Nonlinear Dyn. 2013, 73, 2149–2156. [Google Scholar] [CrossRef]
- Mahapatro, S.R.; Subudhi, B.; Ghosh, S. Design and experimental realization of a robust decentralized PI controller for a coupled tank system. ISA Trans. 2019, 89, 158–168. [Google Scholar]
- Silva, F.F.A.; Adorno, B.V. Whole-body Control of a Mobile Manipulator Using Feedback Linearization and Dual Quaternion Algebra. J. Intell. Robot. Syst. 2018, 91, 249–262. [Google Scholar] [CrossRef]
- Bahmani, E.; Rahmani, M. An LMI approach to dissipativity-based control of nonlinear systems. J. Frankl. Inst. 2020, 357, 5699–5719. [Google Scholar] [CrossRef]
- Pradhan, J.K.; Ghosh, A.; Bhende, C.N. Two-degree-of-freedom multi-input multi-output proportional–integral–derivative control design: Application to quadruple-tank system. Appl. Soft Comput. 2020, 96, 1–17. [Google Scholar]
- Accetta, A.; Alonge, F.; Cirrincione, M.; D’Ippolito, F.; Pucci, M.; Rabbeni, R.; Sferlazza, A. Robust Control for High Performance Induction Motor Drives Based on Partial State-Feedback Linearization. IEEE Trans. Ind. Appl. 2019, 55, 490–503. [Google Scholar]
- Martinez-Trevi∼no, B.A.; Aroudi, A.E.; Cid-Pastor, A.; Martinez-Salamero, L. Nonlinear Control for Output Voltage Regulation of a Boost Converter With a Constant Power Load. IEEE Trans. Power Electron. 2019, 34, 10381–10385. [Google Scholar]
- Yang, S.F.; Wang, P.; Tang, Y. Feedback Linearization-Based Current Control Strategy for Modular Multilevel Converters. IEEE Trans. Power Electron. 2018, 33, 161–174. [Google Scholar]
- Li, S.; Ahn, C.K.; Xiang, Z.R. Decentralized Stabilization for Switched Large-Scale Nonlinear Systems via Sampled-Data Output Feedback. IEEE Syst. J. 2018, 13, 4335–4343. [Google Scholar] [CrossRef]
- Pourasghar, M.; Puig, V.; Ocampo-Martinez, C. Interval observer-based fault detectability analysis using mixed set-invariance theory and sensitivity analysis approach. Int. J. Syst. Sci. 2019, 50, 495–516. [Google Scholar] [CrossRef]
- Al-Durra, A.; Errouissi, R. Robust Feedback-Linearization Technique for Grid-tied LCL Filter Systems Using Disturbance Estimation. IEEE Trans. Ind. Appl. 2019, 55, 3185–3197. [Google Scholar]
- Chen, W.H. Disturbance Observer Based Control for Nonlinear Systems. IEEE Trans. Mechatron. 2004, 9, 706–710. [Google Scholar]
- Yang, Z.J.; Sugiura, H. Robust nonlinear control of a three-tank system using finite-time disturbance observers. Control Eng. Pract. 2019, 84, 63–71. [Google Scholar] [CrossRef]
- Gouta, H.; Said, S.H.; Turki, A.; M’Sahli, F. Experimental sensorless control for a coupled two-tank system using high gain adaptive observer and nonlinear generalized predictive strategy. ISA Trans. 2019, 87, 187–199. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S.H. Disturbance-Observer-Based Control and Related Methods-An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef]
- Varshney, D.; Bhushan, M.; Patwardhan, S.C. Patwardhan. State and parameter estimation using extended Kitanidis Kalman filter. J. Process Control 2019, 76, 98–111. [Google Scholar]
- Huang, C.Z.; Canuto, E.; Novara, C. The four-tank control problem: Comparison of two disturbance rejection control solutions. ISA Trans. 2017, 71, 252–271. [Google Scholar] [CrossRef] [PubMed]
- Adaily, S.; Mbarek, A.; Garna, T.; Ragot, J. Optimal Multimodel Representation by Laguerre Filters Applied to a Communicating Two Tank System. J. Syst. Sci. Complexitys 2018, 31, 621–646. [Google Scholar]
- Yu, H.S.; Yu, J.P.; Liu, J.; Song, Q. Nonlinear control of induction motors based on state error PCH and energyshaping principle. Nonlinear Dyn. 2013, 72, 49–59. [Google Scholar] [CrossRef]
- Xu, T.; Yu, H.S.; Yu, J.P.; Meng, X.X. Adaptive Disturbance Attenuation Control of Two Tank Liquid Level System With Uncertain Parameters Based on Port-Controlled Hamiltonian. IEEE Access 2020, 8, 47384–47392. [Google Scholar] [CrossRef]
- Meng, X.X.; Yu, H.S.; Xu, T.; Wu, H.R. Sliding mode disturbance observer-based the port-controlled Hamiltonian control for a four-tank liquid level system subject to external disturbances. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 23–25 August 2020; pp. 1720–1725. [Google Scholar]
- Cao, J.D.; Manivannan, R.; Chong, K.; Lv, X.X. Enhanced L2 - L∞ state estimation design for delayed neural networks including leakage term via quadratic-type generalized free-matrix-based integral inequality. J. Frankl. Inst. 2019, 356, 7371–7392. [Google Scholar] [CrossRef]
- Canuto, E.; Acua-Bravo, W.; Agostani, M.; Bonadei, M. Digital current regulator for proportional electro-hydraulic valves with unknown disturbance rejection. ISA Trans. 2014, 53, 909–919. [Google Scholar] [CrossRef]
- Trierweiler, J.O.; Francisco, D.D.O.V.; Botelho, R.; Farenzena, M. Channel oriented approach for multivariable model updating using historical data. Comput. Chem. Eng. 2020, 143, 1–13. [Google Scholar] [CrossRef]
- Nguyen, T.S.; Hoang, N.H.; Hussain, M.A.; Tan, C.K. Tracking-error control via the relaxing port-Hamiltonian formulation: Application to level control and batch polymerization reactor. J. Process Control 2019, 80, 152–166. [Google Scholar] [CrossRef]
- Meng, X.X.; Yu, H.S.; Wu, H.R.; Xu, T. Research on the smooth switching control strategy for the four-tank liquid level system. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 5187–5193. [Google Scholar]
- Pourasghar, M.; Combastel, C.; Puig, V.; Ocampo-Martinez, C. FD-ZKF: A Zonotopic Kalman Filter optimizing fault detection rather than state estimation. J. Process Control 2019, 73, 89–102. [Google Scholar] [CrossRef]
- Patel, H.R.; Shah, V.A. Stable Fault Tolerant Controller Design for Takagi–Sugeno Fuzzy Model-Based Control Systems via Linear Matrix Inequalities: Three Conical Tank Case Study. Energies 2019, 12, 2221. [Google Scholar] [CrossRef]
- Mystkowski, A.; Kierdelewicz, A. Fractional-Order Water Level Control Based on PLC: Hardware-In-The-Loop Simulation and Experimental Validation. Energies 2018, 11, 2928. [Google Scholar] [CrossRef]
- Radac, M.B.; Precup, R.E. Data-Driven Model-Free Tracking Reinforcement Learning Control with VRFT-based Adaptive Actor-Critic. Appl. Sci. 2019, 9, 1807. [Google Scholar] [CrossRef]
- Wu, Y.Q.; Isidori, A.; Lu, R.; Khalil, H.K. Performance Recovery of Dynamic Feedback-Linearization Methods for Multivariable Nonlinear Systems. IEEE Trans. Autom. Control. 2020, 65, 1365–1380. [Google Scholar] [CrossRef]
- Djilal, L.; Sanchez, E.N.; Belkheiri, M. Real-time Neural Input–Output Feedback Linearization control of DFIG based wind turbines in presence of grid disturbances. Control Eng. Pract. 2019, 83, 151–164. [Google Scholar] [CrossRef]
- Hesar, H.M.; Zarchi, H.A.; Khoshhava, M.A. Online maximum torque per ampere control for induction motor drives considering iron loss using input–output feedback linearization. IET Electr. Power Appl. 2019, 13, 2113–2120. [Google Scholar] [CrossRef]
- Fu, B.Z.; Wang, Q.Z.; He, W. Nonlinear Disturbance Observer-Based Control for a Class of Port-Controlled Hamiltonian Disturbed Systems. IEEE Access 2018, 6, 50299–50305. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Lyapunov’s theoretical basis. In Applied Nonlinear Control; Jennifer Wenzel, F., Karen Stephens, A., Eds.; Slotine Massachusetts Institute of Technolog: Prentice Hall Englewood Cliffs, NJ, USA, 1991; pp. 53–55. [Google Scholar]
- Yang, L.Y.; Feng, C.C.; Liu, J.H. Control Design of LCL Type Grid-Connected Inverter Based on State Feedback Linearization. Electronics 2019, 8, 877. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Roy, T.K.; Saha, S.; Haque, E.M.; Pota, H.R. Robust Nonlinear Adaptive Feedback Linearizing Decentralized Controller Design for Islanded DC Microgrids. IEEE Trans. Ind. Appl. 2019, 55, 5343–5352. [Google Scholar] [CrossRef]
- Preininger, J.; Scarinci, T.; Veliov, V.M. Metric Regularity Properties in Bang-Bang Type Linear-Quadratic Optimal Control Problems. Set-Valued Var. Anal. 2019, 27, 381–404. [Google Scholar] [CrossRef]
- Dontchev, A.L.; Hager, W.W. Lipschitzian stability in nonlinear control and optimization. SIAM J. Control. Optim. 2019, 31, 569–603. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit | Parameters | Value | Unit |
|---|---|---|---|---|---|
| 0.42 | 0.2 | ||||
| 0.38 | 0.2 | ||||
| 0.2 | 196 | ||||
| 0.2 | 196 | ||||
| 0.2 | 196 | ||||
| 0.2 | 196 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 10 | 10 | ||
| 500 | 500 | ||
| 0.1 | 0.1 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 0.1 | 0.1 | ||
| 1 | 1 | ||
| 0.12 | 0.12 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 0.12 | 1 | ||
| 0.12 | 1 | ||
| 0.2 | 0.1 | ||
| 0.2 | 0.1 | ||
| 10 | 0.1 | ||
| 10 | 0.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, X.; Yu, H.; Xu, T.; Wu, H. Disturbance Observer and L2-Gain-Based State Error Feedback Linearization Control for the Quadruple-Tank Liquid-Level System. Energies 2020, 13, 5500. https://doi.org/10.3390/en13205500
Meng X, Yu H, Xu T, Wu H. Disturbance Observer and L2-Gain-Based State Error Feedback Linearization Control for the Quadruple-Tank Liquid-Level System. Energies. 2020; 13(20):5500. https://doi.org/10.3390/en13205500
Chicago/Turabian StyleMeng, Xiangxiang, Haisheng Yu, Tao Xu, and Herong Wu. 2020. "Disturbance Observer and L2-Gain-Based State Error Feedback Linearization Control for the Quadruple-Tank Liquid-Level System" Energies 13, no. 20: 5500. https://doi.org/10.3390/en13205500
APA StyleMeng, X., Yu, H., Xu, T., & Wu, H. (2020). Disturbance Observer and L2-Gain-Based State Error Feedback Linearization Control for the Quadruple-Tank Liquid-Level System. Energies, 13(20), 5500. https://doi.org/10.3390/en13205500